Embed Size (px)
Citation preview

1686 IEEE/ACM TRANSACTIONS ON NETWORKING, VOL. 22, NO. 5, OCTOBER 2014
Joint Rate Control and Scheduling for ProvidingBounded Delay With High Efficiencyin Multihop Wireless NetworksSoroush Jahromizadeh and Veselin Rakocevic, Member, IEEE
Abstract—We consider the problem of supporting traffic withelastic bandwidth requirements and average end-to-end delayconstraints in multihop wireless networks, with focus on sourcerates and link data rates as the key resource allocation decisions.The network utility maximization-based approaches to supportdelay-sensitive traffic have been predominantly based on either re-ducing link utilization, or approximation of links as M/D/1 queues,which lead to inefficient link utilization under optimal resource al-location, and mostly to unpredictable transient behavior of packetdelays. On the contrary, we present an alternative formulationwhere the delay constraint is omitted and sources’ utility functionsare multiplied by a weight factor. The alternative optimizationproblem is solved by a scheduling algorithm incorporating aduality-based rate control algorithm at its inner layer, wherelink prices correlate with their average queueing delays. We thenpresent an alternative strategy where the utility weight of eachsource is adjusted to ensure its desired optimal path prices, andhence the desired average path delays. Since the proposed strategyis based on solving a concave optimization problem for the elastictraffic, it leads to maximal utilization of the network capacity.The proposed approach is then realized by a scheduling algorithmthat runs jointly with an integral controller whereby each sourceindependently regulates the queueing delay on its paths at thedesired level, using its utility weight factor as the control variable.The proposed algorithms are shown, using theoretical analysisand simulation, to achieve asymptotic regulation of end-to-enddelay with good performance.
Index Terms—Ad hoc networks, cross-ayer design, quality ofservice, wireless networks.
I. INTRODUCTION
M ULTIHOP wireless networks in essence use multihoprouting, where autonomous nodes can act as relay
for the traffic, in order to provide enhanced wireless networkcapacity, connectivity, and power efficiency without the needfor a fixed infrastructure and centralized control. However,supporting applications with high data rate requirements andstrict delay constraints over such networks is a challengingdesign problem due to their dynamic and distributed nature.Specifically, since the wireless channel is shared by all nodes,their transmissions interfere with each other, and consequentlythe data rates of the wireless links are intertwined. As nodes
Manuscript received October 18, 2012; revised July 17, 2013; ac-cepted September 09, 2013; approved by IEEE/ACM TRANSACTIONS ON
NETWORKING Editor E. Modiano. Date of publication October 03, 2013; dateof current version October 13, 2014.The authors are with the School of Engineering and Mathematical
Sciences, City University London, London EC1V 0HB, U.K. (e-mail:[email protected]; [email protected]).Color versions of one or more of the figures in this paper are available online
at http://ieeexplore.ieee.org.Digital Object Identifier 10.1109/TNET.2013.2282872
join or leave the network, new links are set up or disappear,resulting in the interference level changes. Thus, the datarates of wireless links vary over time as a result of fluctuatinginterference as well as shadow fading. Furthermore, multihoprouting and distributed control compromise the performancedue to the additional communication overhead and time neededfor coordination.As pointed out in [1], approaches for quality of service (QoS)
provision can be classified into bandwidth-reservation and best-effort schemes. Bandwidth-reservation-based schemes are suit-able for supporting traffic with minimum bandwidth require-ments. Inevitably, the rejection of some of the traffic resultsin inefficient utilization of network capacity. More importantly,bandwidth-reservation-based schemes lead to a significant com-munication overhead in networks with dynamic settings and as aresult are unsuitable for multihop wireless networks. In contrast,best-effort schemes are suitable for supporting traffic whose de-mand for bandwidth is elastic, but their perceived QoS, referredto as their utilities, is generally assumed to be an increasing andconcave function of their transmission rates. As concluded in[2], for elastic traffic, the overall network QoS is maximizedby admitting all connections and allocating network capacitybased on the connections’ perceived QoS. This is the main de-sign principle of best-effort schemes. The key advantage of thebest-effort approach is that it enables QoS optimal allocation ofnetwork resources using simple and distributed algorithms [1],and as a result is a suitable approach for QoS provision in mul-tihop wireless networks.The problem of supporting traffic with high data rate require-
ments and average end-to-end delay constraints in multihopwireless networks is the main focus of this paper. We assumethat all incoming traffic have elastic bandwidth requirements,but their perceived signal qualities, which exclude the effect ofend-to-end delay, are increasing and concave functions of theirtransmission rates. Furthermore, all or some of the incomingtraffic impose a strict limit on the average end-to-end queueingdelay. With focus on source data transmission rates and linkdata rates as the key resource allocation decisions, our mainobjective is then to develop a source rate control and schedulingstrategy that guarantees bounded average end-to-end queueingdelay and maximizes the overall signal quality of all incomingtraffic, and furthermore can be implemented in the dynamic anddistributed setting of multihop wireless networks. Schedulinghere encompasses resource allocation decisions such as powerassignment for each link, which determines its data rate.Recent research has shown the potential benefits of using
network utility maximization framework in systematic design
1063-6692 © 2013 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission.See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.

JAHROMIZADEH AND RAKOCEVIC: JOINT RATE CONTROL AND SCHEDULING FOR PROVIDING BOUNDED DELAY WITH HIGH EFFICIENCY 1687
of hierarchical (or “layered”) distributed solutions of networkresource allocation problems [3]. The benefits of this ap-proach are even more profound in multihop wireless networkdesign problems due to interdependencies between resourceallocation decisions at different network modular layers, andconsequently we also adopt such approach here to addressthe aforementioned objectives. As will be seen in Section III,the network-utility-maximization-based approaches to supportdelay-sensitive traffic have been predominantly based on eitherreducing link utilization or approximation of links asqueues. The former approach includes methods such as usingvirtual data rates [4], [5] and minimizing network conges-tion [6], which normally lead to nearly zero queue lengthsin the long term due to reduced link utilization, but provideno control over the transient behavior of packet delays, aswell as window-based flow control methods [7] that provideend-to-end delay guarantees and controlled transient behaviorof packet delay but utilize only less than half of the networkcapacity. The latter approach that is adopted in [8] and [9] isbased on assumptions that contrast with realistic scenarios.Moreover, it also results in underutilized links under optimalresource allocation. On the contrary, our prime objective hereis to regulate average queueing delay with high accuracy,efficiency, and performance.Our proposed solution is based on an alternative formulation
to the original optimization problem, where the delay constraintis omitted and instead the utility function for each source is mul-tiplied by a primarily unknown weight factor. We present a so-lution to the alternative optimization problem that comprises ascheduling algorithm incorporating a duality-based rate controlalgorithm at its inner layer. The key feature of the proposed al-gorithm is that optimal link prices computed by the rate con-trol algorithm correspond to the average link queueing delays.Based on the analysis of sensitivity of optimal path prices foreach source to the variation of its weight factor, we present an al-ternative strategy where bounded average end-to-end queueingdelay is provided through adjustment of sources’ weights. Inthe proposed strategy, we still assume that the perceived signalquality of an incoming traffic is an increasing and strictly con-cave function of its transmission rate. However, the weight ofits utility is adjusted to ensure the desired optimal path prices,and hence the desired average path delays, which can be inter-preted as sources understating (overstating) their level of per-ceived signal quality from the allocated transmission rate inorder to obtain their desired optimal path prices, and hence thedesired average path delays at the equilibrium. This approachmay result in slight reduction in the overall optimal perceivedsignal quality, due to possible different optimal rate allocation,but ensures the required average end-to-end delay and still leadsto efficient utilization of the network capacity. Given the dy-namic and distributed nature of multihop wireless networks, theproposed strategy is realized by incorporating an integral con-troller in the scheduling algorithm whereby each source inde-pendently regulates the average queueing delay on its paths atthe desired level, using its weight factor as the control variable.The proposed algorithm can be deployed in a distributed setting.Moreover, it is efficient and robust to the changes in the networkconfiguration. The transient behavior of the average end-to-endqueueing delay can be further controlled by appropriate adjust-
ment of the delay regulator parameter. We then study the con-ditions under which the proposed scheduling policy combinedwith the proposed integral controller achieve asymptotic regula-tion of end-to-end queueing delay. Simulation experiments fur-ther demonstrate the asymptotic regulation of end-to-end delaywith good precision and performance.The rest of this paper is organized as follows. In Section II,
the problem is introduced formally as a network utility maxi-mization problem, and the limitations of the approxi-mation of links for delay estimation are discussed. In Section III,the predominant network utility maximization approaches tosupport delay-sensitive traffic as well as their limitations aredescribed. In Section IV-A, the proposed alternative optimiza-tion problem, its representation as a scheduling problem, andthe corresponding solution are presented. In Section V, the re-sult of sensitivity of delay to the variation of sources weightsis presented followed by the proposed solution for providingbounded delay. Simulation results are given in Section VI, andSection VII concludes the paper.
II. PROBLEM DEFINITION
A. Assumptions and Notations
Throughout the text, vectors are denoted by boldface lower-case letters, and matrices and sets by capital letters. For sim-plicity, the same notations are used to denote the sets and theircardinality.This paper considers the problem of rate control and sched-
uling for simultaneous transmissions of multiple delay-sensitivetraffic over a multihop wireless network. Let be the set ofsources that generate the delay-sensitive traffic, and be theset of links that constitute the multihop wireless network. Eachsource has multiple alternative paths to its destinationdenoted by . For notational simplicity, let , , and alsodenote the total number of links, total number of sources, andtotal number of paths available to source , respectively. The setof links used by each path is defined by the vectorwith elements
if path uses linkotherwise.
The routing matrix for source is subsequently definedby , and the routing matrix for thenetwork, where , by . We denotethe th row of by .Let be the power assignment, or any other resource con-
trol decisions such as activation/inactivation, and retransmis-sion probability in random access MAC protocols, and be thedata rate at link . Link data rates are assumed to be a functionof global power assignments, i.e., . Let be the setof feasible power assignments and . Theconvex hull of denoted by is assumed to be closedand bounded.Let be the data transmission rate on path , and
be the aggregate data transmission rate of source .We assume that each source gains a utility atrate , where are twice continuously differentiable, strictlyconcave, and increasing for all . Furthermore .

1688 IEEE/ACM TRANSACTIONS ON NETWORKING, VOL. 22, NO. 5, OCTOBER 2014
We assume that the average delay experienced by a packetat link is given by , where is the totaltraffic rate on link . Furthermore, are differentiable,decreasing in , and increasing in , for all . Let be the
vector with elements , for all . The averageend-to-end delay on path of source is then givenby and is assumed to be upper-bounded by . Let bean vector of upper bounds on average end-to-end delayon each path with elements . Since for every sourcethe average end-to-end delay upper bound is assumed to be anidentical value of for all paths , we have , forall .
B. Problem Formulation
The optimization objective is to find data transmission ratesand link data rates such that
(1)
subject to (2)
(3)
(4)
(5)
The optimization objective (1) maximizes the aggregate utilityof all sources. Constraint (2) requires the traffic rate enteringeach link not to exceed its allocated data rate. Constraint (3)restricts link data rates to the convex hull of feasible link datarates. Constraint (4) imposes an upper bound on the averageend-to-end delay faced by a packet on individual paths.Recall that is increasing in and decreasing in .
Hence, the values of for which the feasible set (2)–(5) isnonempty is given by , , and
, where satisfies (3).
C. Limitations of Approximation of Links as M/D/1 Queues
As will be discussed in Section III, estimation of the av-erage delay experienced by a packet at a link, i.e., ,
, has been predominantly based on approximation of linksas independent queues. This approach stems from theKleinrock independence approximation [10], which is in prin-ciple based on assumptions that the traffic arrives at networkentry points according to a Poisson process, and the networkis densely connected. Using this approach, the average packetdelay can be estimated as
(6)
The upper bound (6) is based on assumption that at optimalityis close to but not greater than for all . Using the upperbound (6), the optimization problem (1)–(5) becomes convexand can be solved, for example, using primal decomposition [3]as follows
subject to (3) (7)
where
subject to (2), (4), and (5) (8)
Subproblem (8) can be solved using primal or dualalgorithms proposed in [8]. Moreover, is concave([11, Proposition 3.4.3]), and therefore the set of optimalLagrange multipliers associated with constraints (2) and (4) insubproblem (8) is the subdifferential of [11]. This propertycan then be used to develop algorithms for solving (7), whenduality-based approaches are used to solve (8).However, the queue approximation of links has sev-
eral flaws. First, the key assumptions behind the ap-proximation (6) do not hold since the traffic at entry points areregulated by the rate controller and are deterministic, multihopnetworks are composed of mostly disjoint paths that compriseserial links, and the traffic entering the links can be further reg-ulated to limit its burstiness [12], [13]. The delay caused by theburstiness of the arriving traffic at each link can therefore beassumed to be negligible, and consequently the average delaya packet experiences at equilibrium is primarily a function ofnumber of packets in the system at equilibrium, which is deter-mined by the dynamics of the rate control and scheduling algo-rithms at their transient state. Second, in the approximation (6),as traffic rates at links approach their capacities, their delaysgrow exponentially. This implies that at optimality links are notefficiently utilized, in order to ensure bounded delay.
III. RELATED WORK
A. Joint Rate Control and Scheduling for Elastic Traffic
The problem of joint rate control and scheduling for elastictraffic has been extensively studied [14], [15]. Dual-optimiza-tion-based approach has been the preferred solution strategy forthis problem since it enables decomposition of the problem intothe rate control and scheduling “layers” coupled loosely through“link prices.” Alternative formulations of this problem lead todifferent solutions, as described in following sections.1) Link-Centric Formulation: The optimization problem
(1)–(3) and (5), which is the focus of this paper, is based on thelink-centric formulation. The dual problem is given by
(9)
where
subject to (3), (5)
s.t. (3), (5) (10)
and is the vector of Lagrange multipliers associated with con-straint (2). Using the shadow price interpretation of Lagrangevariables [16], can also be interpreted as the link data rateprices. The optimization problem (10) can be decomposed intothe following rate control and scheduling subproblems, respec-tively:
(11)

JAHROMIZADEH AND RAKOCEVIC: JOINT RATE CONTROL AND SCHEDULING FOR PROVIDING BOUNDED DELAY WITH HIGH EFFICIENCY 1689
and
(12)
where is the aggregate data transmission rate of source , andis vector of path transmission rates for source . The
dual problem (9) can be solved using the subgradient method asfollows:
(13)
where , is the th row of , and andare the solutions of (11) and (12) given , respectively. Therate control subproblem (11) and the scheduling subproblems(12) are coupled via link prices . In (11), each sourceadjusts its path rates according to its path prices. In (12),link data rates are updated based on the link prices. The linkprice algorithm (13) and rate control algorithm (11) can be per-formed in a distributed fashion by individual links and sources,respectively. The scheduling problem (12) is a computationallycomplex problem in general since is not concave in manycases, and as a result, convex programming methods cannot beused. Given the fact that link prices are updated at everytime-slot and therefore (12) has to be solved at every time-slot,finding an efficient, simple, and distributed solution becomescrucial. Cases where the scheduling problem (12) is solvableinclude node-exclusive interference model, low-signal-to-inter-ference-plus-noise-ratio (SINR) model, and high-SINR model,which are described in detail in [14]. Moreover, alternative sub-optimal solutions that are simpler and enable distributed imple-mentation have been developed, and their efficiency has beenstudied for similar cases [14].2) Node-Centric Formulation: In this formulation, links are
denoted by node pairs , and the data rate on link thatis allocated for data towards destination is denoted by .Furthermore, the source and destination nodes of sources aredenoted by and , respectively. The transmission rate ofsource is denoted by . The constraints (2) and (3) in theoptimization problem are then replaced by
(14)
(15)
Consequently, dual decomposition results in the following ratecontrol and scheduling subproblems, respectively:
(16)
and
(17)
where is the Lagrange multiplier associated with constraintin (14). After solving (17), for each link ,
, if , and otherwise. TheLagrange multipliers are updated using the subgradient methodby individual nodes as described in [14].Compared to the link-centric formulation, the scheduling
problem (17), which is referred to as maximum weightback-pressure algorithm, has the same form as (12), but it alsoincorporates routing decisions. Furthermore, the rate controlproblem (16) for each source is only dependent on theprice at the source node, whereas the rate control problem(11) for each source is dependent on the sum of the linkprices along its paths , .
B. Network Utility Maximization Approaches to SupportDelay-Sensitive Traffic
1) Minimizing Delay Using Virtual Data Rates: Since thealgorithm (13) couples the link prices to their average queuelengths, it may lead to large queue lengths and hence largequeueing delays at the equilibrium. As suggested in [4] and[5], this can be avoided by using the slightly smaller “virtual”link data rates in (13) instead of the actual link data rates.Specifically, , in (13) is replaced by ,where is a positive factor slightly smaller than 1. While themodified algorithm still leads to the link prices close to theiroptimal level, it results in zero equilibrium queue lengths sincelinks’ traffic loads are slightly less than their actual data ratesat equilibrium. Main disadvantages of this approach are that itdoes not completely utilize network capacity and provides nocontrol over the transient behavior of packet delays.2) Guaranteeing Bounded Delay Using Window-Based Flow
Control: In [7], the problem of designing a joint rate controland scheduling algorithm that provides provable throughputand provable per-flow delay is considered. The node-centricformulation (1), (14), (15), and (5) are considered where thequeue-length based back-pressure algorithm (17) or the devel-oped low-complexity algorithms described in Section III-Ahave been shown to have poor delay performance under certaincases, and have difficult to quantify or control delay. A newdistributed and low-complexity congestion control and sched-uling algorithm is proposed where the packet transmissionsare scheduled by a rate-based rather than a queue-length-basedscheduling algorithm, and congestion control is based onwindow flow control, which deterministically bounds theend-to-end delay backlog within the network. It is shown thatby appropriately choosing the number of backoff mini-slots forthe scheduling algorithm and the window size of each flow, theproposed algorithm can utilize close to half of the systems ca-pacity under the one-hop interference constraint and guaranteea per-flow expected delay upper bound that increases linearlywith the number of hops. Furthermore, each flow’s tradeoffbetween throughput and delay can be individually controlledby the window size.Similar to the approaches based on queue approx-
imation and virtual data rates, the main limitation of this ap-proach is that bounded end-to-end delay can only be guaran-teed by underutilization of system capacity, i.e., less than halfunder the one-hop interference constraint. In addition, there isa tradeoff between the guaranteed delay bounds and throughputlevels within this reduced capacity region. The guaranteed delaybound for each flow is also a factor of number of hops.

1690 IEEE/ACM TRANSACTIONS ON NETWORKING, VOL. 22, NO. 5, OCTOBER 2014
Our approach is similar to this approach in that it too is basedon controlling the end-to-end backlog to control the delay bothat equilibrium and the transient state. In our approach, this is ac-complished by correlating the link prices in a duality-based ratecontrol algorithm similar to (13) with the average link queueingdelays, and then using the utility weight coefficient of sourcesas control variables to asymptotically regulate path prices at thedesired level. The transient behavior of the average end-to-endqueueing delay can be further controlled by appropriate adjust-ment of the delay regulator parameter. However, our approachdiffers from the approach presented in [7] in that it can guar-antee any bound on the average end-to-end queueing delay, aslong as has full column rank, while ensuring maximal utiliza-tion of the system available capacity. Hence, in our approachonly packet end-to-end transmission time is lower-bounded bya factor of number of hops, which is negligible when the equi-librium end-to-end backlog is modest. Rather than trade offbetween delay and throughput, in our approach, the averageend-to-end queueing delay bounds are guaranteed by the appro-priate choice of utility weight coefficient of sources that ensurethe desired optimal path prices. This approach may result in thesame or slightly different optimal rate allocation, but still leadsto maximal utilization of the network capacity.3) Minimizing Network Congestion: In [6] the primary
objective is to find a joint link data rate and flow assignmentstrategy that supports maximum data rates and yields minimumend-to-end delay. However, for general queueing systems,this leads to an intractable problem formulation. Hence, analternative problem formulation is proposed where the networkcongestion, defined as maximum link utilization over all links
(18)
is minimized while allowing communication between sourceand destinations at a given data rate. Since the objective func-tion is quasi-convex, the resulting optimization problem canbe solved, for example, by a bisection algorithm that involvessolving a sequence of convex feasibility problems. Evidently,this approach neither aims to efficiently utilize links nor canguarantee bounded delay.4) Maximizing Utility as a Function of Rate and Delay:
In [8], the congestion control problem in networks supportingtraffic with various levels of rate, delay, and packet losssensitivity is studied. The proposed approach is based onincorporating the requirements for rate, delay, and packetloss in the utility function of sources. It is assumed that eachsource transmits only one flow using a fixed path, and thatlink data rates are fixed. The utility of each source issubsequently defined by
where coefficients and indicate the degree of sensitivity ofthe traffic to rate and delay, respectively. It is shown that similarto the basic congestion control problem for elastic traffic, the al-ternative optimization problem can be solved using both primaland dual algorithms. The analysis is then applied to networkswith mixed voice and data traffic, including the case where pri-ority queueing is used. It is shown using simulation that pri-
ority queueing improves both the R-factor of voice traffic andthe throughput of data traffic, at the expense of the packet delayof data traffic. However, the estimation of packet delay is basedon approximation of links as independent queues that,as discussed in Section II-B, stems from unrealistic assump-tions and results in underutilized links under optimal resourceallocation.In [9], the congestion control problem for networks where
traffic sources are heterogeneous with respect to their levels ofsensitivity to both rate and delay is considered. It is assumed thatsource incurs a delay cost per unit of flow rate, whereis the average end-to-end delay experienced by a packet. The
utility of each source is subsequently defined by
(19)
The resulting optimization problem is shown to be nonconcavein general and consequently may have several stationary points.Several variants of a primal rate control algorithm are shownto converge to a local maximum, but never to a saddle point. Itis concluded that dynamic rate control algorithms such as TCPmay not be able to attain efficient rate allocations and levels ofdelay that are acceptable to diverse classes of traffic, in the ab-sence of differentiated services. In this paper, we assume that theaverage packet end-to-end delay on each path is upper-bounded,in which case, as explained in Section II-B, the problem can beformulated as convex optimization problem (1)–(5), given ap-proximation (6).This paper extends the ideas presented in our previous pa-
pers [17], [18]. In both papers, we exploit the correlation be-tween optimal link prices and equilibrium link average queueingdelays in duality-based rate control algorithm in order to pro-vide bounded average end-to-end queueing delay. In [17], wefirst present an approach in which lower bounds on sources’transmission rates are derived in order to ensure the requiredbounded delay. This approach inevitably entails admission con-trol. In the second approach, we introduce an alternative for-mulation where the delay constraint is omitted and instead theutility function for each source is multiplied by a weight factor.The proposed solution comprises a scheduling algorithm incor-porating a duality-based rate control algorithm at its inner layerand an algorithm that dynamically adjusts sources’ weights toensure the required bounded delay. In this paper, we further de-velop the latter approach by designing a new scheduling algo-rithm and delay regulator that regulate average queueing delaywith high accuracy and performance. Moreover, we provide acomplete analysis of the stability of the proposed algorithms.In [18], we analyze the sensitivity of optimal path prices foreach source to the variation of its weight factor and present adelay regulator that is integrated into the duality-based rate con-trol and scheduling algorithms given in [14]. In this paper, weuse the sensitivity analysis results in [18] to develop a solutionthat regulates average queueing delay with higher accuracy andperformance.
IV. ALTERNATIVE PROBLEM FORMULATION
The proposed solution for providing bounded delay isbased on an alternative formulation for optimization problem

JAHROMIZADEH AND RAKOCEVIC: JOINT RATE CONTROL AND SCHEDULING FOR PROVIDING BOUNDED DELAY WITH HIGH EFFICIENCY 1691
(1)–(5), which is presented in this section, and its properties areexamined.
A. Alternative Optimization Problem
The proposed alternative optimization problem has the fol-lowing form:
subject to (2), (3), (5) (20)
where represents utility of source , or preferenceover transmission rate . Compared to the original problem(1)–(5), in the alternative problem (20), delay constraint (4) hasbeen omitted and instead the utility function for each source
is multiplied by the weight parameter . A geometricinterpretation of is that higher (respectively, lower) valuesof result in higher (respectively, lower) marginal increase inpreference or utility of source at a particular rate.The dual problem for (20) is given by
(21)
where
subject to (3)
subject to (3) (22)
and and are the Lagrange multipliers associated with con-straints (2) and (5), respectively. Using the shadow price inter-pretation of Lagrange variables [16], can also be interpretedas the link data rate prices.The optimization problem (20) is convex, and constraints
(2) and (5) are affine. Moreover, since is a finite set,is a polyhedral set that can be expressed by a set of affineinequalities and equalities. Thus, Slater’s condition reducesto feasibility [16], and the optimal duality gap is zero. Let
and be the primal and dual optimal solu-tions, respectively. Let also . It then follows fromKarush–Kuhn–Tucker (KKT) optimality conditions [16] that
(23)
(24)
(25)
Equation (25) implies that for any for which. It then follows from (23) that
(26)
which means that for each source , the values of as-sociated with paths with positive flows are minimum and henceequal. Since the objective function in (20) is strictly concavewith respect to , is unique, and it follows from (26)that is also unique. However, (20) is not strictly concave ineither , or in general, since every , isa hyperplane of for which is identical. Hence, neithernor may be unique. Furthermore, given that ,
and may have linearly dependent rows, may not be uniquein general.
B. Representation as a Scheduling Problem
Optimization problem (20) can be alternatively presented asthe following equivalent form:
subject to (3) (27)
where
subject to (2), (5) (28)
The key feature of the alternative form (27) is the decomposi-tion of the problem into master scheduling problem (27), and thewell-known rate control subproblem (28) with fixed link datarates. In addition, is concave by [11, Proposition 3.4.3], andtherefore, as shown in [11, Sec. 5.4.4], the set of optimal La-grange multipliers associated with constraint (2) in subproblem(28) is the subdifferential of .The dual problem for (28) is similar to (21) and (22)
with fixed link data rates . Consequently, KKT conditions(23)–(25) as well as (26) also hold for problem (28). Letand be the primal and dual optimal solutions of(28) given , respectively. Let also . Since theobjective function in (20) is strictly concave with respect to
, is unique, and it follows from (26) that isalso unique. However, as in the case of problem (20), isnot unique in general. Hence, , where is theset of optimal Lagrange multipliers associated with constraint(2).1) Solution of the Multipath Rate Control Subproblem: Rate
control problem (28) has been extensively studied in the litera-ture [19]. Here, we consider the duality-based solutions whereLagrange variables are updated according to
(29)
where , ,and is defined by
As discussed in [20], path rates of sources with multiplepaths in (29) continuously oscillate and do not convergesince is not strictly concave. To circumventthis problem, Proximal Optimization Algorithms [21] or thedistributed algorithm proposed in [20] that is suitable for onlineimplementation can be used. Since the objective function in(28) is not strictly concave in , by [11, Proposition 6.1.1],the dual function of (28) may not be differentiable at everypoint. Moreover, as shown in [11, Sec. 6.1], the term within thebrackets in (29) is a subgradient of the dual function, and thusthe term on right side of (29) is discontinuous.The right-hand side of algorithm (29) corresponds to themultiple of marginal increase in average queueing delay at
link , given the traffic rate entering link is equal to .While this condition holds at links at the network traffic entrypoints, the traffic rate at the other links are bounded by the data

1692 IEEE/ACM TRANSACTIONS ON NETWORKING, VOL. 22, NO. 5, OCTOBER 2014
rates of the links connected to their source node. However, atthe equilibrium, the right-hand side of (29) is the multipleof marginal increase in average queueing delay for all links
. This implies that, by the results from stability of systemswith vanishing perturbation [22], if link prices are updated ac-cording to multiple of the link average queueing delays (i.e.,
, , where is the number of packetsin link at time ), path rates and link prices convergeto the primal and dual optimal solutions of (28), respectively,given is sufficiently small. In this case, link average queueingdelays at equilibrium are equal to .2) Solution of the Scheduling Problem: Using ideas from the
gradient optimization methods [11], we propose the followingsolution for scheduling problem (27):
(30)
where , and
otherwise(31)
where is the optimal Lagrange variable of (28) given .Since is a finite set, is a polyhedral set, and henceby [11, Proposition B.21], the optimization problem in (31) at-tains a maximum at some extreme point of . Therefore,the solution space in (31) is reduced to . At each step of (30),is computed as follows. The optimization problem in (31) iscomputed over the set . If the solution results in the sameobjective value as the current link data rates , equals and(30) stops. Otherwise, takes the value of the any of the solu-tions and (30) continues. The optimization problem in (31) isof the same form as the well-known scheduling problem (12)and thus can be solved using distributed algorithms in somecases, as discussed in Section III-A. Efficient implementationof the equilibrium condition in (31) also depends on these solu-tion algorithms.The right-hand side of (30) may not be continuous in gen-
eral, for example, when is not unique, or when in (31)strict complimentary slackness condition does not hold at([23,Theorem 3.2.2]), and as a result, the existence of solutionsis not guaranteed. In the analysis that follows, we assume thatthe assumptions H1 (existence of solutions of (30) and (31)),and H2 (right-hand side of (30) is Lebesgue measurable andlocally bounded) in [24] hold.By [23, Theorem 2.2.6], the mapping is continuous, and
since is also unique, it is a continuous function. We assumethat is also nonpathological [24].Theorem 1: Algorithms (30) and (31) converge to an optimal
solution of (27).The proof is given in the Appendix.
V. PROPOSED SOLUTION FOR PROVIDING BOUNDED DELAY
A. Impact of Sources’ Weights On Delay
As explained in Section IV-B.1, if link prices in the duality-based algorithm (29) are instead updated proportionally to linkaverage queueing delays, optimal link prices are then propor-tional to the equilibrium link average queueing delays. Further-more, by (26), optimal path prices for each source are
equal to its marginal utility at its optimal aggregate data trans-mission rate, multiplied by its weight. This suggests an alter-native approach to the original formulation (1)–(5), in whichthe delay bounds in (4) are instead guaranteed by adjusting theweight of sources.The following lemma shows that for the alternative problem
(20), the optimal path prices for each source , that is, , grow as its weight increases.
Lemma 1: Under the assumptions in Section II-A, upper andlower bounds on the sensitivity of and to the vari-ation of parameters are given by
(32)
(33)
for all .The proof is given in the Appendix. As explained in
Section IV-B.1, if link prices in the duality-based rate controlalgorithm are updated according to multiple of the linkaverage queueing delays, link average queueing delays atequilibrium are equal to , and as a result, path averagequeueing delays at equilibrium equal . Consequently,Lemma 1 suggests an alternative strategy for providing boundedend-to-end delay based on the adjustment of sources’ weights.Specifically, in the proposed strategy, we still assume that theperceived signal quality of an incoming traffic is an increasingand strictly concave function of its transmission rate. However,the weight of its utility is adjusted to ensure the desired optimalpath prices, and hence the desired average path delays. Thisadjustment of the weights of the utilities can be interpreted assources understating (overstating) their level of satisfaction,or perceived signal quality, from the allocated transmissionrate in order to obtain their desired optimal path prices, andhence the desired average path delays at the equilibrium. Thisapproach may result in the same or slightly different optimalrate allocation compared to the case with the initial sourceweights. Precisely, by (33), the optimal transmission rate ofeach source either remains unchanged or increases as its weightincreases. In the latter case, the optimal transmission rate ofsome other sources decreases. Given the uniqueness of optimalsource transmission rates, optimal source transmission ratesfor the perturbed objective function in this case is not optimalfor the original problem. Consequently, this approach maylead to slight reduction in the overall perceived signal quality,but ensures the required optimal path prices and still leads tomaximal utilization of the network capacity.
B. Delay Regulation via Dynamic Adjustment of Sources’Weights
The main challenge in guaranteeing bounded delay throughadjustment of sources’ weights is that sources’ weights thatguarantee the required bounded delay generally vary fordifferent network configurations. Clearly, a concave utilityfunction always implies that a connection has elastic bandwidthrequirements, and as a result, best-effort strategies may allocatedifferent rates to the same connection (with the same weight)under various network configurations, in order to maximize theaggregate utility of all connections. This means that for every

JAHROMIZADEH AND RAKOCEVIC: JOINT RATE CONTROL AND SCHEDULING FOR PROVIDING BOUNDED DELAY WITH HIGH EFFICIENCY 1693
network configuration, sources’ weights have to be recomputedto ensure the required bounded delay. Hence, the dynamic anddecentralized nature of multihop wireless networks calls for arobust, responsive, and distributed algorithm that can adjustsources’ weights so as to ensure bounded end-to-end delayunder modest parameter perturbations.In order to design an algorithm that meets these requirements,
recall that (32) implies that optimal path price for each sourceincrease with its weight . This suggests that for each
source , utility weight can be used as control vari-able to regulate its average path queueing delay. Thus, the fol-lowing integral controller is proposed, whereby each source ad-justs its weight in proportion to the average end-to-end delaytracking error to regulate average end-to-end delay at the desiredlevel:
(34)
Algorithm (34) is performed by each source independentlyand ensures bounded end-to-end delay under parameter pertur-bations that do not destabilize the system. Incorporating (34) inthe scheduling algorithms (30) and (31) leads to continuous per-turbation of utility weights and thus the objective function in(27), which tends to zero as the algorithms approach the equi-librium. In this case, can be interpreted as the perturbedsupergradient of the new objective function at , where isthe perturbed utility weights. Intuitively, as long as the pertur-bation rate of the objective function in (27) is small compared tothe speed at which link data rates approach the optimal solutionof the current (27), link data rates in algorithms (30), (31), and(34) track the changing optimal solution of (27). The followingtheorem examines the conditions under which algorithms (30)and (31) combined with (34) achieve asymptotic regulation ofend-to-end delay.Theorem 2: Given has full column rank and in (34)
is sufficiently small, algorithms (30) and (31) combined with(34) converge to an optimal solution of (27) with parameter ,where is the weight of sources that guarantees bounded delayspecified in (4), if subproblem (28) is solved using duality-basedalgorithm (29), where link prices are instead updated as mul-tiple of link average queueing delays.The proof is provided in the Appendix. Note that the full
column rank condition for ensures that (30) and (31) com-bined with (34) has an equilibrium for any . This condition isnot very restrictive and holds for typical scenarios, such as thecase when source–destination pairs are distinct.
VI. SIMULATION RESULTS
The objective of the simulation experiments is twofold: first,to illustrate that algorithms (30) and (31) converge to an op-timal solution of (27), where link prices are updated ac-cording to multiple of link average queueing delays over afinite time; second, to examine the accuracy of algorithms (30)and (31) combined with (34) in regulating packet end-to-endlatency at the desired level, and to compare their performanceagainst the commonly used virtual data rate approach describedin Section III-A.
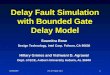
Fig. 1. Network topology and alternative paths for source–destination pairsand .
A. Network Model
For simulation experiments, we consider the networktopology in Fig. 1, where there are two source–destination pairs
and . For source–destination pair ,there are two alternative paths and
. For source–destination pair , there isonly a single path .Each active link is assumed to have a fixed data rate of
packets per second. To model the scheduling constraint (3), weuse the notions of contention graph and contention matrix [15].In the contention graph, vertices represent links, and edges rep-resent the contention between the links. Maximal cliques ofthe contention graph embody the local contention among links;Links that belong to the same maximal clique cannot be activesimultaneously. Let be the number of maximal cliques in thecontention graph. The contention matrix is then de-fined by
if link belongs to the maximal cliqueotherwise.
Thus, a necessary condition for scheduling is given by
(35)
It can be shown that (35) is also a sufficient condition for sched-uling if the contention graph is perfect [15]We assume that each wireless node can only communicate
with one other node at any time. This results in the contentiongraph shown in Fig. 2. There are three maximal cliques:links (1, 2, 3), links (2, 3, 4), and links (4, 5). Thus, on path
, only one link—either link 4 or 5—can be active.Similarly, on path , only one link—either link 3or 4—can be active. However, on path ,links 1 and 4 can be active simultaneously. This providesincentives for using path , despite beinglonger, to increase the transmission rate of since link 1can be active while data are being transmitted on link 4 forany of the three flows. Since the contention graph in Fig. 2has no odd holes, it is perfect, and therefore (35) is a sufficientscheduling constraint in this case.The utility functions for both sources are assumed to be of the
form .
B. Experimental Results
We use SimEvents discrete-event simulation software forsimulation experiments. As discussed in Section IV-B.1, pathrates in (29) can be computed using Proximal OptimizationAlgorithms [21] or the distributed algorithm proposed in [20].Both of these algorithms are based on solving an equivalent

1694 IEEE/ACM TRANSACTIONS ON NETWORKING, VOL. 22, NO. 5, OCTOBER 2014
Fig. 2. Network contention graph and its maximal cliques.
optimization problem where the objective function has anadditional quadratic function of the difference between theauxiliary variables and the path rates. The equivalent problemis then solved using a two-level iterative algorithm, where theauxiliary variables are updated at the outer level, and a strictlyconcave optimization problem is solved at the inner level giventhe current value of the auxiliary variables. At every step ofthe outer level, the auxiliary variable values become closer tothe solution of the inner-level optimization problem, and thusthe added quadratic term becomes smaller and eventually con-verges to zero. Here, for simplicity, we add a small quadraticterm in (22) in order to make it strictly concave. Whenis sufficiently small, the modified objective function remainsincreasing over the feasible rate region (2) and (5) for all thatsatisfy (3). Moreover, the computed primal solutions are closeto the those computed using Proximal-Optimization-based al-gorithms when they run for finite time since the added quadraticterm in these algorithms does not completely vanish. Sourcedelay regulation is based on algorithm (34), using currentaverage end-to-end queueing delays as feedback. In all exper-iments, it is assumed that packet/ms, ,
, and .In the first experiment, source weights are fixed at
and , and algorithms (30) and (31) are simulated wherelink prices are updated for a fixed time period according tomultiple of link average queueing delays, i.e., ,, where is the number of packets in link at time .
The evolution of link data rates, path prices, and path trans-mission rates are shown in Figs. 3–5, respectively. As seen inFig. 3, link data rates converge rapidly to the neighborhood oftheir optimal values ,although continue to oscillate slightly due to the fact that therate control algorithm runs for finite time, and thus path pricesdo not fully converge to their optimal values . Moreover,link data rates have a nondifferentiable curve due to discontin-uous nature of the right-hand side of (30).The oscillation of link data rates also results in modest
oscillation of path prices, and thus source aggregate rates,around their optimal levels and
, as seen in Figs. 4 and 5, respectively. Also,as seen in Fig. 5, although path prices for source 1 must beequal (see Section IV-A) at every step of (30) and (31), they di-verge at some points since the values of are approximate.Specifically, when path rates are computed in a duality-basedalgorithm (see Section IV-B.1), only paths with minimumprices have positive rates. Thus, the slight difference in pathprices at some points caused by the approximate values ofresults in significant oscillation of path rates of source 1, around
Fig. 3. Link data rates when source weights are fixed at andand algorithms (30) and (31) are simulated.
Fig. 4. Path prices when source weights are fixed at and andalgorithms (30) and (31) are simulated.
Fig. 5. Path transmission rates when source weights are fixed at andand algorithms (30) and (31) are simulated.
the their optimal levels . The added quadraticterm in this example, however, somewhat limits the extent ofthe divergence of path rates.In the second experiment, algorithms (30) and (31), with the
same setup as the first experiment, are simulated jointly with(34) with delay bounds ms, and
. Moreover, algorithms (30) and (31) are simulatedwhere link prices are updated for a fixed time period ac-cording to (29), using virtual data rates with to re-tain high link utilization. The evolutions of instantaneous packet

JAHROMIZADEH AND RAKOCEVIC: JOINT RATE CONTROL AND SCHEDULING FOR PROVIDING BOUNDED DELAY WITH HIGH EFFICIENCY 1695
Fig. 6. Instantaneous packet end-to-end delay when algorithms (30) and (31)are simulated jointly with (34) with delay bounds ms.
Fig. 7. Evolution of utility weight coefficients when algorithms (30) and (31)are simulated jointly with (34) with delay bounds ms.
end-to-end delays in both first and second experiments are com-pared in Fig. 6. It can be seen that algorithms (30) and (31)combined with (34) with proper choice of parameter regu-late packet end-to-end delay at their upper-bound levels withgood precision in a relatively short time. The slight oscillationof delay is caused by the oscillations of link data rates and linkprices in algorithms (30) and (31) described previously. Thetransient behavior of packet end-to-end delay can be furthercontrolled by adjustment of parameter . Since their equilib-rium is the solution to the optimization problem (27) with equi-librium weights (Fig. 7), they also lead tomaximal utilization of network capacity.The approach based on virtual data rates reduces the delay
to near zero in the long term since it leads to underutilizedlinks at equilibrium. However, the rate at which it reduces thedelay is inversely correlated to the level of link utilization atits equilibrium. Thus, as seen in Fig. 6, this approach can onlyachieve high link utilization at the expense of slow reduction ofend-to-end delays and unpredictable transient behavior.
VII. CONCLUSION
We consider the problem of supporting traffic with elasticbandwidth requirements and average end-to-end delay con-straints in multihop wireless networks and present an approachwhere the utility weight of each elastic traffic is adjusted toensure the desired average path delays, as well as maximalutilization of network capacity and hence high level of overall
perceived signal quality. The proposed solution comprises ascheduling algorithm incorporating a duality-based rate controlalgorithm at its inner layer, and an integral controller wherebyeach source regulates average end-to-end queueing delay byusing its utility weight as the control variable. Simulationexperiments indicate that when the inner-layer rate controlalgorithm runs over a finite time period, with proper choice ofparameter , the proposed algorithms regulate delay with goodprecision and transient performance compared to the com-monly used virtual data rates approach, which underutilizeslink capacities to reduce packet delay.
APPENDIX
Proof of Theorem 1: Let be an equilibrium point of (30)and (31). From (31), it follows that
(36)
Since is a supergradient of at
It follows from (36) that , so ,for all . This means that is an optimal solution of(27), i.e., , where denotes the set of optimal solutionsof (27). With a slight abuse of notation, here we define as an
vector with elements .Consider the Lyapunov function
where . Since is unique, and, for all . Moreover, since is nonpatho-
logical, is also nonpathological. Let be the nonpatho-logical derivative of the map with respect to (30) and (31) at
, where and are defined in [24, Definition 4]. Let, , where is the Clarke gradient of
at [25]. Also let . Then
Using the characterization of Clarke gradient in [25, Eq. (A.11)],it follows from Taylor’s theorem that, as approaches . Furthermore, since is concave, by
[11, Proposition B.24], there exists such that
(37)
Let be any routing matrix that defines the links usedby only one arbitrary path with positive optimal rate given thatis associated with each source. It then follows that
where satisfies (37).

1696 IEEE/ACM TRANSACTIONS ON NETWORKING, VOL. 22, NO. 5, OCTOBER 2014
It can be shown that typically , whereand is the identity matrix. To see this, con-
sider the case where each source has only a single path, i.e.,. In this case, is differentiable with respect to
and [26]. Evaluating thesensitivity equation of [22, Eq. (2.9)] for dual algorithm (29) atits equilibrium point yields
The last approximation is based on the fact that at optimality,total flow on each link is near or equal its capacity. Thus, afterfactoring out , the second term on the right-hand sideof the equality can be approximated as an identity matrix. Fur-thermore, it is assumed that the system operates at points whereand as a result are close for all . Consequently, the
values of , are close. Hence,, where , .
From (31), it follows that
Also, (37) implies
Adding both inequalities yields
(38)
Thus
(39)
Furthermore, the largest weakly invariant set of pointsfor which is the set of equilibrium points . Hence,by [24, Proposition 3], every solution of algorithms (30) and(31) approaches the set of equilibrium points as .
Proof of Lemma 1: It results from (26) that
(40)Let be a perturbation of parameter defined by
otherwise
where and . If , taking thelimit yields , and from (40), .If , given the strict concavity of ,and are the unique maximizers for problem (20) withparameters and , respectively. Therefore
and
Adding both inequalities results in
Except for , all the elements in the above summation arezero. Since , ,which implies , since is an increasing func-tion. Thus
Taking the limit yields the lower bound of (33).It results from the optimality condition in [11, Proposi-
tion 2.2.2] for optimization problem (20) at that
Similarly, it results from the optimality condition for (20) at theperturbed that
Using definition (26), adding both inequalities and taking thelimit yields
(41)
Let . Since, is nonempty, otherwise
would not be optimal. Since it is assumed that ,, and hence from (26),
for all . Taking the limit results in
and , so
Let . Using a similarargument, , for all , so

JAHROMIZADEH AND RAKOCEVIC: JOINT RATE CONTROL AND SCHEDULING FOR PROVIDING BOUNDED DELAY WITH HIGH EFFICIENCY 1697
Hence, since it was assumed that , it follows from (41)
that , for all .In (40), since , the first and second terms on the
right side of the equation are negative and positive, respectively.Since the term on the left side of the equation is positive
from which the upper bounds in (32) and (33) follow.Proof of Theorem 2: Similar to the proof of Theorem 1, we
abuse the notation slightly and here define as an vectorwith elements . Given has full column rank,
has a solution and hence the equilibriumof (30) and (31) combined with (34) exists for any . As ex-plained in Section IV-B.1, if link prices in the duality-basedrate control algorithm are updated according to multiple ofthe link average queueing delays, link average queueing delaysat equilibrium are equal to , and as a result, path av-erage queueing delays at equilibrium equal , which arebounded by at the equilibrium .By [23, Theorem 2.2.6], the mapping is continuous,
and since is also unique, it is a continuous function. Weassume that is also nonpathological. Consider the Lya-punov function
where . Therefore, and, for all . Moreover, since
and are nonpathological, is also nonpatholog-ical. Let be the nonpathological derivative of the map withrespect to (30), (31), and (34) at , where and
are defined in [24, Definition 4]. Also let ,where , , and is the Clarke gra-dient of at . Then
Since , (40) implies that , for all . Itthen follows from (41) and (40) that
We assume that the system operates at points where and asa result are close for all . Therefore, the values of
, are close. Furthermore, in this case it canbe assumed that has approximately the average value of the
range given in (32), so . Thus
for small (42)
Inequality (42) implies that can be approximated as a strictlydiagonally dominant matrix ([27, Definition 6.1.9]). Moreover,off-diagonal elements of are very small relative to the diag-onal elements, and as a result, can be approximated as a sym-metric matrix. Since by (32) the diagonal elements of are pos-itive, it then follows from [27, Theorem 6.1.10] that all eigen-values of are real and positive and hence is positive definite.Thus
In the first equality, the second term on the right-hand sideresults from the assumption that is symmetric. The aboveinequality results from the positive definiteness of . It followsfrom Geršgorin Theorem ([27, Theorem 6.1.1]) and inequal-ities (42) and (32) that eigenvalues of are upper-bounded

1698 IEEE/ACM TRANSACTIONS ON NETWORKING, VOL. 22, NO. 5, OCTOBER 2014
by , . Applying Rayleigh–Ritz Theorem([27, Theorem 4.2.2]) to the first term and using the upperbound (39) for the second term on the right-hand side of theabove inequality then yields
(43)
Consequently, if
(44)
then for all . Furthermore, the largestweakly invariant set of points for which
is the set of equilibrium points . Hence,by [24, Proposition 3], every solution of algorithms (30) and(31) combined with (34) approaches the set of equilibriumpoints as .
REFERENCES
[1] B. Wydrowski and M. Zukerman, “QoS in best-effort networks,” IEEECommun. Mag., vol. 40, no. 12, pp. 44–49, Dec. 2002.
[2] S. Shenker, “Fundmental design issues for the future Internet,” IEEEJ. Sel. Areas Commun., vol. 13, no. 7, pp. 1176–1188, Sep. 1997.
[3] M. Chiang, S. H. Low, A. R. Calderbank, and J. C. Doyle, “Layeringas optimization decomposition: A mathematical theory of network ar-chitectures,” Proc. IEEE, vol. 95, no. 1, pp. 255–312, Jan. 2007.
[4] X. Lin and N. B. Shroff, “Joint rate control and scheduling in multihopwireless networks,” in Proc. IEEE 43rd Conf. Decision Control, At-lantis, Bahamas, Dec. 2004, pp. 1484–1489.
[5] F. Paganini, Z. Wang, J. C. Doyle, and S. H. Low, “Congestion con-trol for high performance, stability, and fairness in general networks,”IEEE/ACM Trans. Netw., vol. 13, no. 1, pp. 43–56, Feb. 2005.
[6] T. Yoo, E. Setton, X. Zhu, A. Goldsmith, and B. Girod, “Cross-layerdesign for video streaming over wireless ad hoc networks,” in Proc.IEEE 6th Workshop Multimedia Signal Proc., Sienna, Italy, Oct. 2004,pp. 99–102.
[7] P. Huang, X. Lin, and C. Wang, “A low-complexity congestion controland scheduling algorithm for multihop wireless networks with order-optimal per-flow delay,” in Proc. IEEE INFOCOM, Shanghai, China,Apr. 2011, pp. 2588–2596.
[8] Y. Li, M. Chiang, and A. R. Calderbank, “Congestion control in net-works with delay sensitive traffic,” in Proc. IEEE INFOCOM, 2007,pp. 2746–2751.
[9] S. Stidham, “Pricing and congestion management in a network withheterogeneous users,” IEEE Trans. Autom. Control, vol. 49, no. 6, pp.976–981, Jun. 2004.
[10] D. P. Bertsekas and R. Gallager, Data Networks. Englewood Cliffs,NJ, USA: Prentice-Hall, 1992.
[11] D. P. Bertsekas, Nonlinear Programming. Belmont, MA, USA:Athena Scientific, 1999.
[12] R. L. Cruz, “A calculus for network delay, Part I: network elements inisolation,” IEEE Trans. Inf. Theory, vol. 37, no. 1, pp. 114–131, Jan.1991.
[13] R. L. Cruz, “A calculus for network delay, Part II: Network analysis,”IEEE Trans. Inf. Theory, vol. 37, no. 1, pp. 132–141, Jan. 1991.
[14] X. Lin, N. B. Shroff, and R. Srikant, “A tutorial on cross-layer opti-mization in wireless networks,” IEEE J. Sel. Areas Commun., vol. 24,no. 8, pp. 1452–1463, Aug. 2006.
[15] L. Chen, S. H. Low, and J. C. Doyle, “Joint congestion control andmedia access control design for ad hoc wireless networks,” in Proc.IEEE INFOCOM, Mar. 2005, pp. 2212–2222.
[16] S. Boyd and L. Vandenberghe, Convex Optimization. Cambridge,U.K.: Cambridge Univ. Press, 2004.
[17] S. Jahromizadeh and V. Rakocevic, “Rate control for delay-sensitivetraffic in multihop wireless networks,” in Proc. 4th ACM WorkshopPerform. Monitoring Meas. Heterogeneous Wireless Wired Netw.,Tenerife, Spain, Oct. 2009, pp. 99–106.
[18] S. Jahromizadeh and V. Rakocevic, “Joint rate control and schedulingfor delay-sensitive traffic in multihop wireless networks,” in Proc.IEEE 73rd Vehicular Technology Conf., Budapest, Hungary, May2011, pp. 1–5.
[19] R. Srikant, The Mathematics of Internet Congestion Control. Boston,MA, USA: Birkhäuser, 2004.
[20] X. Lin and N. B. Shroff, “Utility maximization for communication net-works with multipath routing,” IEEE Trans. Autom. Control, vol. 51,no. 5, pp. 766–781, May 2006.
[21] D. P. Bertsekas and J. N. Tsitsiklis, Parallel and Distributed Compu-tation: Numerical Methods. Belmont, MA, USA: Athena Scientific,1997.
[22] H. K. Khalil, Nonlinear Systems. Upper Saddle River, NJ, USA:Prentice-Hall, 2002.
[23] A. V. Fiacco, Introduction to Sensitivity and Stability Analysis in Non-linear Programming. New York, NY, USA: Academic, 1983.
[24] A. Bacciotti and F. Ceragioli, “Nonpathological Lyapunov functionsand discontinuous Carathéodory systems,” Automatica, vol. 42, pp.453–458, 2006.
[25] A. Bacciotti and F. Ceragioli, “Nonsmooth optimal regulation and dis-continuous stabilization,”Abstract Appl. Anal., vol. 20, pp. 1159–1195,2003.
[26] S. H. Low and D. E. Lapsley, “Optimization flow control-I: basic al-gorithm and convergence,” IEEE/ACM Trans. Netw., vol. 7, no. 6, pp.861–874, Dec. 1999.
[27] R. A. Horn and C. R. Johnson, Matrix Analysis. NewYork, NY, USA:Cambridge Univ. Press, 1990.
Soroush Jahromizadeh received the B.Sc. degreein industrial engineering from Amirkabir Universityof Technology, Tehran, Iran, in 1995, the M.Sc. de-gree in systems engineering from University CollegeLondon, London, U.K., in 2002, and theM.Sc. degreein general engineering and Ph.D. degree in electricalengineering from City University London, London,U.K., in 2005 and 2013, respectively.Since 1995, he has worked for engineering consul-
tancy firms, where he has performed operations re-search and financial analysis for industrial projects.
Between 2012 and 2013, he was a Researcher with City University London,where he worked on optimization of energy networks. His research interests in-clude design, optimization, and control of networks.
Veselin Rakocevic (M’01) received the Dipl.Ing.degree from the University of Belgrade, Belgrade,Serbia, in 1998, and the Ph.D. degree from QueenMary, University of London, London, U.K., in 2002,both in electronic engineering.He works as a Senior Lecturer in electronic engi-
neering with City University London, London, U.K.,where he has been since 2002. During his career, heworked on a number of industry-led research projectsin the areas of wireless network control and energynetwork control. His main research interest is in the
operation of multihop wireless networks, especially in the problem of optimalscheduling, rate control, and quality of service.














![Home | University of Waterloo | University of Waterloo - IEEE ......in multihop cellular network (MCNs) [13], delay tolerant networks (DTNs) [14]. textcolorblueMahmoud and Shen [15]](https://img.pdfslide.net/doc/110x75/60a0322eb6f8cb51be352138/home-university-of-waterloo-university-of-waterloo-ieee-in-multihop.jpg)