Embed Size (px)
Citation preview

JOURNAL OF LATEX CLASS FILES, VOL. 6, NO. 1, JANUARY 2007 1
Two Efficient Solutions for Visual OdometryUsing Directional Correspondence
Oleg Naroditsky, Student Member, IEEE, Xun S. Zhou, Student Member, IEEE,Jean Gallier, Stergios I. Roumeliotis, Member, IEEE and Kostas Daniilidis, Senior Member, IEEE
Abstract—This paper presents two new, efficient solutions to the two-view, relative pose problem from three image point correspondences andone common reference direction. This three-plus-one problem can be used either as a substitute for the classic five-point algorithmusing a vanishing point for the reference direction, or to make use of an inertial measurement unit commonly available on robots andmobile devices, where the gravity vector becomes the reference direction. We provide a simple closed-form solution and a solutionbased on techniques from algebraic geometry and investigate numerical and computational advantages of each approach. In a set ofreal experiments, we demonstrate the power of our approach by comparing it to the five-point method in a hypothesize-and-test visualodometry setting.
Index Terms—computer vision, structure from motion, visual odometry, minimal problems, Groebner basis
F
1 INTRODUCTION
DATA association has been identified as one of thetwo main challenges in visual odometry next to
observation noise. Cluttered environments with inde-pendently moving objects yield many erroneous featurecorrespondences which have to be detected as outliers.Random Sample Consensus (RANSAC) provides a stableframework for the treatment of outliers in monocularvisual odometry [1]. For RANSAC, it is highly desirableto have a hypothesis generator that uses the minimalnumber of data points to generate a finite set of solu-tions, since this minimizes the probability of choosingan outlier as part of the data. In this paper we propose anew minimal method, the ”three-plus-one” method, forcomputing relative pose for monocular visual odometrythat uses three image correspondences and a commondirection in the two camera coordinate frames, whichwe call a ”directional correspondence”. We thus enablevisual odometry using RANSAC with only a four-pointminimal solver, as long as the fourth point is sufficientlyfar away.
The main contribution of this paper is the introductionof two new, efficient algorithms for the three-plus-oneproblem. After formulating the relative pose problemas a system of four polynomial equations in Section 3,we present a direct, closed-form solution, leading to aquartic polynomial of one variable in Section 4. Our
• Oleg Naroditsky, Jean Gallier and Kostas Daniilidis are with the Depart-ment of Computer and Information Science, University of Pennsylvania,Philadelphia, PA 19104. E-mail: {narodits, jean, kostas}@cis.upenn.edu.
• Xun Zhou and Stergios Roumeliotis are with the Department of ComputerScience and Engineering, University of Minnesota, Minneapolis, MN55455. E-mail: {zhou, stergios}@cs.umn.edu.
second method based on action matrix method fromByrod et al. [3], is presented in Section 5.
The second contribution of this paper threefold: weprovide a detailed computational analysis of both solu-tions in Section 7, highlight the differences in numericalproperties in Section 8, and show that the three-plus-onemethod can be used in place of the widely used five-point method in real-world visual odometry applicationsin Section 9.1. When used with RANSAC, our visualodometry does not require any knowledge about whichpoints are at infinity, because we simply let RANSACchoose the inlier hypothesis from all available imagecorrespondences. In Section 9.2, in order to demonstratethe potential of our method for vision-inertial fusion, wepresent the results of a real experiment where we use theIMU to provide a directional constraint.
2 RELATED WORK
Minimal solvers were first introduced by Nister [4]with his famous five-point algorithm for structure frommotion. Since then, minimal solutions have been foundfor a number of problems in geometric vision, includingthe solutions to the autocalibration of radial distortion[5], [6], pose with unknown focal length [7], infinitesimalcamera motion problem [8] and others. The trend in thisfield has been to use algebraic geometry techniques toanalyze problem structure and construct solvers. Thisbody of work was initially based on Grobner bases tech-niques [9], but recently started to include other relatedmethods for finding solutions to algebraic systems inorder to improve speed and accuracy [10], [3].
It has been known [2] and it is straightforward todeduce that the knowledge of the directional corre-spondence reduces the number of rotation unknowns

JOURNAL OF LATEX CLASS FILES, VOL. 6, NO. 1, JANUARY 2007 2
to oneThere have been three previous papers dedicatedto solving the three-plus-one problem. However, all ofthem fall short of providing either efficient or closed-form solutions. The formulation from Kalantari et al.[11] requires three variables for the translation and usesthe tangent half-angle formula to create a polynomialsystem. They solve the system using the action matrixmethod, leading to 12 solutions and a singularity at therotation of 180 degrees.
Our formulation improves on this method by takingadvantage of the fact that one of the translation compo-nents is non-zero, leading to a smaller system, which hasonly four solutions and avoids the rotation instability.
In a recent work by Fraundorfer et al. [12], a differ-ent formulation is used to obtain a system with only4 solutions. Their method follows the method usedby Nister for the five-point algorithm [4], except thesolution subspace is now three-dimensional instead offour-dimensional. This formulation leads to a 4th-orderpolynomial, and the minimum number of solutions.However, this solution requires null-space extraction anda Gauss-Jordan elimination of a dense 10 × 6 matrixto obtain the coefficients. While our formulation alsoleads to 4th order polynomial, the coefficients of ourpolynomial are computed faster and in closed form.
A related problem was solved in the work of Loboand Dias [13] who use a general formulation of a givenreference direction (vertical in their case) to solve severalgeometric vision problems by using vanishing points orinertial measurements.
In addition, compared to the three papers above, weprovide a more elaborate experimental analysis, includ-ing real-world situations and a detailed discussion of thedegenerate configurations.
3 PROBLEM FORMULATION AND NOTATION
Given image point correspondences q and q′ in twocalibrated views, it is known that the “essential matrix”constraint relating them is q′>Eq = 0, where E ≡ tSwhere the rotation matrix S ∈ SO(3) and t is a 3 × 3skew-symmetric matrix corresponding to the translationvector t, which is known only up to scale. The essentialmatrix thus has five parameters.
We will now define and formulate the three-plus-one problem. We are given three image correspondencesqi ↔ q′i, i = 1, .., 3 from calibrated cameras, and asingle directional correspondence in the form of two unitvectors d ↔ d′. Our goal is to find the essential matrix Ewhich relates the two cameras, and thus find the rigidtransformation between them up to a scale factor. Wewill first show that this problem is equivalent to findingthe translation vector t and a rotation angle θ around anarbitrary rotation axis.
Let us choose the arbitrary rotation axis to be e2 =[0, 1, 0]>. We can now compute the rotation matrices Rand R′ that coincide d and d′ with e2, and apply themto the respective image points, yielding pi = Rqi and
pi′ = R′qi
′ for each i = 1, .., 3. This operation alignsthe directional correspondence in the two views withe2. Once the axis is chosen, we only need to estimatethe rotation angle around it and the translation vectorin order to reconstruct the essential matrix.
After taking the directional constraint into account,from the initial five parameters in the essential ma-trix, we now only have to estimate three. This three-parameter essential matrix E relates the points p and p′
as follows:p′i
TEpi = 0, (1)
Since the rotation is known to be around e2, we can usethe axis-angle parameterization of a rotation matrix toparametrize E as follows:
E = ˆt(I + sin θe2 + (1− cos θ)e22), (2)
where t = R′t.Each image point correspondence gives us one such
equation of the form (1), for a total of three equationsin four unknowns (elements of t and θ). To create apolynomial system, we set s = sin θ and c = cos θ, andadd the trigonometric constraint s2 + c2 − 1 = 0, for atotal of four equations in five unknowns. In order toreduce the number of unknowns and take care of thescale ambiguity in E, we choose the direction of theepipole by assuming that the translation vector t hasthe form [x, y, 1]>. This means that for each t that werecover, −t will also need to be considered as a possiblesolution.
Once we substitute for E in equation (1), the resultingsystem of four polynomial equations has the followingform. For i = 1, .., 3,
ai1xs + ai2xc + ai3ys + ai4yc+ai5x− ai2s + ai1c + ai6 = 0 (3)
s2 + c2 − 1 = 0. (4)
We will refer to these equations as F ={fi(x, y, s, c), i = 1, ..., 4} in the rest of the paper.The coefficients aij are expressed in terms of imagecorrespondences as follows:
ai1 = p′iypix, ai2 = −p′iy, ai3 = −p′ixpix − 1,
ai4 = p′ix − pix, ai5 = piy, ai6 = −p′ixpiy,(5)
such that pi = [px, py, 1]> and p′i = [p′x, p′y, 1]>. In thenext section we will analyze and solve this system inclosed form and show that it has up to four solutions.The total number of possible pose matrices arising fromour formulation is therefore at most 8, when we takeinto account the fact that we have to consider the signambiguity in t. When the motion of the camera in thez direction (after the rotation by R and R′) is extremelysmall, the parametrization t = [x, y, 1]> is numericallyunstable. We can deal with this rare instability by for-mulating and solving a system for the parametrizationst = [x, 1, z]> and t = [1, y, z]>, which can be easily done

JOURNAL OF LATEX CLASS FILES, VOL. 6, NO. 1, JANUARY 2007 3
using the methods we describe below, but omitted forthe purposes of this presentation. However, when usedwith RANSAC, the different directional correspondencesgive rise to different t (though still the same t), makingthe probability of z being close to zero very small. Thusthe reformulations are unnecessary in practice.
In order to find the pose matrices from solutions tothe system F , we first recover the rotation as Re2 =exp(atan2(s, c)e2), and translation as t = ±[x, y, 1]>.Finally, we reconstruct each pose as follows:
P =[
S | t]
=[
R′>Re2R | R′>t]. (6)
Point triangulation and chirality checks are used toeliminate some of the false solutions. Since this solutionmethod is designed to be used in robust estimationframeworks (such as RANSAC), any remaining falsehypotheses can be eliminated by triangulating an ad-ditional point and choosing the P with the minimumreprojection error.
4 CLOSED-FORM SOLUTIONWe hereafter show that the system F has four solutions,and that it can be solved analytically by eliminationand back-substitution. Specifically, we first present anelimination procedure to obtain a 4th-order univariatepolynomial in c, which can be solved in closed-form.Subsequently, we determine the remaining three vari-ables by back-substitution, where each solution of creturns exactly one solution for the other three variables.Therefore, we have a total of 4 solutions for the relativerotation matrix and translation vector.
The main steps of the elimination procedure are listedbelow.
1) Solve for x and y as a function of c and s usingthe first two equations in (3). The variables x andy can be expressed as quadratic functions of c ands.
2) Substitute x and y in the third equation in (3).This yields again a cubic polynomial in c and s,which is reduced into a quadratic by exploitingthe relationship between its coefficients and thetrigonometric constraint.
3) Finally, using the Sylvester resultant (see Chapter 3,§5 in [14] ), we can eliminate one of the remainingtwo unknowns, say s, and obtain a 4th-order poly-nomial in c.
Now, we describe the details of our approach. Rewritethe first two equations in (3) as linear functions of c ands as follows:[a11s + a12c + a15 a13s + a14ca21s + a22c + a25 a23s + a24c
][xy
]=
[a12s− a11c− a16
a22s− a21c− a26
](7)
and solve the above linear system for x and y:[xy
]=
1d
[a23s + a24c −(a13s + a14c)
−(a21s + a22c + a25) a11s + a12c + a15
]·
·[a12s− a11c− a16
a22s− a21c− a26
], (8)
where the determinant
d = (a11s + a12c + a15)(a23s + a24c)−− (a21s + a22c + a25)(a13s + a14c). (9)
Substituting the expression for x and y into the thirdequation in (3) and multiplying both sides of the equa-tion by d, yields a cubic equation in s and c:
g1s3+g2cs
2+g1sc2+g2c
3+g3s2+g4sc+g5c
2+g6s+g7c = 0.(10)
The coefficients gi for i = 1, ..., 6 are derived symbolicallyand are found in Appendix A, equation (14). By using thefact that s2 + c2 = 1, and exploiting the relation betweenthe coefficients of the first four terms, we can reduce thisequation to the following quadratic
g1s + g2c + g3s2 + g4sc + g5c
2 + g6s + g7c = 0. (11)
In the final step, we employ the Sylvester resultant toeliminate one of the two remaining variables from equa-tions (4) and (11). The resultant of the two polynomialsis the determinant of the Sylvester matrix
g3 g4c + g1 + g6 g5c2 + g2c + g7c 0
0 g3 g4c + g1 + g6 g5c2 + g2c + g7c
1 0 c2 − 1 00 1 0 c2 − 1
,
(12)which leads to a 4th-order polynomial equation∑4
i=0 hici = 0, with coefficients hi given in Appendix
A, equation (15). This shows that in general, the systemhas four solutions for c. Back-substituting the solutionsof c into equation (11), we compute the correspondingsolutions for s. Note that each solution for c correspondsto one solution for s because we can reduce the order ofequation (11) to linear in s, once c is known, by replacingthe quadratic terms s2 with 1 − c2. After s and c aredetermined, we compute the corresponding solutions forx and y using (8) for a total of four solutions. We willdescribe how to recover the pose matrix from x, y, s andc in Section 3.
5 ACTION MATRIX SOLUTION
In this section, we will present a method for solving thesystem F via eigendecomposition of an action matrix.The elimination template was constructed using sym-bolic mathematics software Maple. We present only thesteps required for implementation of the method andrefer the reader to [3], [15], [16] for details. Below welist the steps required to construct this action matrix andread off the solutions from its eigenvectors.
1) Construct the 21× 25, sparse elimination templatematrix C using the coefficients aij , as described inAppendix B.
2) Perform Gaussian elimination with partial pivotingor LU decomposition of C. Let U be the resultingupper trapezoidal matrix.
3) Extract two sub-matrices A = U19..21,19..21 and B =U19..21,22..25. Compute D = A−1B.

JOURNAL OF LATEX CLASS FILES, VOL. 6, NO. 1, JANUARY 2007 4
4) Construct the 4 × 4 action matrix Mc as follows:Mc1..3,1..4 = D and Mc4,1..4 = [0, 1, 0, 0]. Thecolumns of Mc correspond to monomials [y, c, s, 1].
5) Compute the real eigenvectors of Mc, and divideeach by its last element.
6) The values of y, c and s in that order are the firstthree entries of each of the normalized eigenvec-tors.
7) For each set of values for y, c and s, compute thevalue for x by solving the Equation (3), which islinear in x.
These values can be once again used to extract the posematrices, as described in Section 3.
6 DEGENERATE CONFIGURATIONS
It was pointed out in [12] that the three-plus-one algo-rithm is not degenerate for collinear world points, exceptfor the line parallel to the translation direction. Thereexist two additional degenerate configurations.
The first one occurs when all world points lie on thehoropter [17], i.e. their projections are the same in thefirst and second images. This configuration causes thecoefficients ai4 from (5) to vanish, removing the terms ofthe form ai4yc from the system. The resulting polynomialsystem does not generate a zero-dimensional ideal, andthus has an infinite number of solutions. This fact wasverified using Maple.
The second degenerate configuration occurs whenthe determinant d in (8) is zero. When this occurs,the translation t cannot be estimated from the pointcorrespondences using the equation (8). We can derivethe geometric condition that causes the determinant tovanish as follows. After projecting two generic 3D pointsxi = [Xi, Yi, Zi]> for i = 1, 2 into the camera frames,we get pi = xi and p′i = Re2xi + t. We compute thecorresponding coefficients (5), and substitute them intoequation (9). After using the fact that s2 + c2 = 1, thedeterminant condition becomes
(Z2Y1 − Z1Y2)(cx− s) + (Z1X2 −X1Z2)y++ (X1Y2 −X2Y1)(sx + c) = 0, (13)
which we can rewrite as (−R>e2
t)>x1x2 = 0. This condi-tion means that the second camera’s center of projection,expressed in the first camera’s coordinate system, isorthogonal to the vector formed by the cross product ofthe world points. In other words, the degeneracy occurswhen the world points are coplanar with the translationvector. This is a more general case than the three pointsparallel to the translation direction discussed in [12].
7 COMPUTATIONAL CONSIDERATIONS
When using RANSAC, we can estimate the probabilityof success in getting an outlier-free hypothesis basedon the number of elements in the minimal data set.When we estimate the epipolar geometry using imagecorrespondences only, there are two sets of inliers: the
set that can be used as a directional correspondences anda set that can be used as a point correspondences. Bothinlier ratios have to be taken into account when com-puting the RANSAC stopping criterion. If the numberof distant points is sufficiently large (such as in outdoorscenes), we can realize a significant performance gainwith our method since fewer hypotheses will need to beconsidered [18] due to smaller model size.
Since the hypothesis generator will run hundreds oftimes per frame in RANSAC-based visual odometryschemes, it is important to compare the computationalrequirements for the five point algorithm with the pro-posed methods. Computing the coefficients aij requires9 multiplications. The closed-form solution requires 125multiplications before arriving at the quartic polynomial.The real roots of the 4th degree polynomial can be ex-tracted in closed form by computing and solving the de-pressed quartic and two quadratics for a total of about 40operations and six square roots. The computation of theremaining variables takes additional 144 operations. Themain computational step of the action matrix algorithmis Gaussian elimination (LU decomposition) of a 21× 25matrix. While theoretically taking O(2n3/3), or about9000 operations, the elimination of our sparse matrixonly requires about 500 multiplications. The eigenvaluedecomposition of a 4 × 4 matrix is done by solving aquartic equation and eigenvectors are extracted with aninverse power iteration, which costs 88 multiplications.
On the other hand, the main computational steps inthe classic five-point algorithm [4] are: extraction ofthe null space of a dense 5 × 9 matrix, requiring 280operations, Gauss-Jordan elimination of a dense 10× 20matrix, requiring about 1300 operations, and real rootisolation of a 10th degree polynomial, which can beaccomplished as eigenvalue decomposition of a 10× 10sparse companion matrix or as an iterative root isolationand refinement process. From these observations we canconclude that both the closed-form and the action-matrixforms of the three-plus-one algorithm are significantlymore efficient than the five-point algorithm. In realexperiments, the performance of the C implementationof the closed-form algorithm outperformed a highlyoptimized implementation of the five-point method, onaverage, by a factor of 5 (2.6µs compared to 13.0µs on a3GHz laptop).
8 SIMULATION RESULTSIn this section we establish the expected performancelevel of our algorithms in noise-free and noisy condi-tions, comparing them first to each other and then to thefive-point relative pose estimation algorithm. We studyboth single and double precision arithmetic implementa-tions for the action-matrix and closed-form algorithms,and look for numerical differences between them, as wellas the differences between the five-point method and themore constrained three-plus-one method.
The input data was generated as follows. The pose ofthe first camera was defined to be the identity pose [I|0],

JOURNAL OF LATEX CLASS FILES, VOL. 6, NO. 1, JANUARY 2007 5
−15 −10 −5 00
100
200
300
400
500
Noise−free, single precision
Base 10 log of overall pose error
Cou
nt
−15 −10 −5 00
100
200
300
400
500
Noise−free, double precision
Base 10 log of overall pose error
Cou
nt
action matrixclosed form
action matrixclosed form
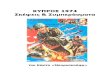
Fig. 1. Distribution of numerical errors in recovered posesfor 104 random configurations with single and double precisionimplementations. The error measured is the Frobenius norm ofthe difference between the true and estimated pose matrices.The median errors for double precision are 3.9 · 10−14 forthe action matrix and 3.1 · 10−13 for the closed form method.For single precision the errors are 9.3 · 10−6 and 3.5 · 10−5,respectively.
and the reference direction was generated as a randomunit vector. The pose of the second camera was gener-ated uniformly at random as a unit translation vector tand three Euler angles corresponding to roll, pitch andyaw of the second camera within the limits specifiedby the experiment. Sets of five three dimensional worldpoints were generated within a spatial volume definedby the parameters of the experiment, so as to be visibleby both cameras. The world points were then projectedinto the image planes of the two cameras (with identicalintrinsic calibration defined by the experiment) to formimage correspondences, and contaminated with Gaus-sian noise with standard deviation in pixels defined bythe experiment. The second camera’s reference directionwas then computed, and the directional correspondencevectors were contaminated by Gaussian rotational noisewith standard deviation in degrees defined by the exper-iment. The sets of image and directional correspondenceswere then used to compute pose with the three-plus-oneand the five-point algorithms. Each method producesa set of pose hypotheses for each input set. The errorreported for each input set is the minimum error for allhypotheses. All comparisons between algorithms wererun on identical input data.
8.1 Numerical Stability with Noise-free DataFirst, we establish the correctness and numerical stabilityof our algorithms. In these experiments, the pose wasallowed to vary over the entire range of rotations, andthe translation and directional correspondence vectorswere generated uniformly at random and normalizedto length 1. Figure 1 shows errors in pose recovery onperfect, simulated data. The noise metric is the minimumFrobenius norm of the differences between the true posematrix and each computed pose matrix (up to eightper instance). The error distribution shows that bothalgorithms perform as expected, with the action matrixmethod exhibiting better numerical stability. The numer-ical stability of the closed-form method can be improvedby solving the problem three times, using different pairs
0 1 20
10
20
30Sideways motion
Directional/pixel noise
Epip
ole
erro
r (de
g)
0 1 20
0.5
1
1.5
2Sideways motion
Directional/pixel noise
Rot
atio
n er
ror (
deg)
0 1 20
5
10
15
20
25
30Forward motion
Directional/pixel noise
Epip
ole
erro
r (de
g)
0 1 20
0.5
1
1.5
2Forward motion
Directional/pixel noise
Rot
atio
n er
ror (
deg)
Dir Dir + PixPix
DirDir + PixPix
DirDir + PixPix
DirDir + PixPix
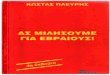
Fig. 2. Median translation and rotation errors for the sidewaysand forward motion of the baseline camera against noise stan-dard deviation for the double precision implementation of theclosed-form method. The directional correspondence noise (Dir)is in degrees, and the image noise (Pix) is in pixels. As withother motion estimation methods, the sideways motion givessignificantly worse performance than forward motion on thesame data.
of points in Equation (7), but the computational cost ofcomputing and then scoring the additional hypothesismakes this impractical, as we saw in Section 7.
8.2 Image and Directional Correspondence NoiseIn the rest of this section, we will simulate a 640x480camera with a 60◦ FOV, where structure points arefound between 10 and 40 baselines away, where onebaseline is the distance between camera centers. Wewill first consider only pixel noise, and deal with di-rectional correspondence noise later. Figure 2 comparesperformance for forward and sideways motion of thecamera under different pixel noise and directional cor-respondence noise conditions. It comes as no surprisethat forward motion is generally better numerically, andthat the rotation estimate (1DOF) is significantly betterthan the estimate of the epipole. The plots also conclu-sively demonstrate numerical stability of both single anddouble precision implementations. Further experimentsdescribed in the technical report demonstrate that inthese noisy conditions, the performance of the single anddouble precision action matrix method and the singleprecision closed-form method are almost identical.
The directional noise was simulated as a rotationof the direction vector around a random axis with anangle magnitude drawn from a normal distribution. Thestandard deviation of the noise is plotted on the x-axis.
8.3 Comparison with the Five-point MethodWe also compare the three-plus-one method to the classicfive-point method. While they are not equivalent (sincethe five-point method does not require a specific pointto be at infinity), they can be used interchangeably insome real situations, as described in the next section.
Since both closed-form and action-matrix-based algo-rithms exhibit similar performance, we only comparethe double precision implementations of our closed-form algorithm and the five-point algorithm. Figure 3demonstrates the effect of the field of view on thealgorithms. The rotation estimation is generally better

JOURNAL OF LATEX CLASS FILES, VOL. 6, NO. 1, JANUARY 2007 6
0 20 40 60 80 1000
5
10
15
20
25
30
35
Field of view (deg)
Epip
ole
erro
r (de
g)
0 20 40 60 80 1000
2
4
6
8
Field of view (deg)
Rot
atio
n er
ror (
deg)
3p1, 0.15p, 0.13p1, 0.55p, 0.53p1, 1.05p, 1.0
3p1, 0.15p, 0.13p1, 0.55p, 0.53p1, 1.05p, 1.0
Fig. 3. Median translation and rotation errors for varying fieldsof view of the baseline camera and random poses. In the legend,the three-plus-one algorithm is labeled ”3p1”, and the five-pointalgorithm is ”5p”. The number after the algorithm name indicatesthe standard deviation of pixel and directional (for three-plus-one method only) error standard deviations levels in pixels anddegrees. The colors also correspond to noise levels: red is 0.1pixel and 0.1◦, red is 0.5 pixel and 0.5◦, and green is 1.0 pixeland 1.0◦.
with the three-plus-one algorithm, while translation er-ror does not decrease as quickly with the field of viewin the three-plus-one case as in the five-point case. InFigure 4 we plot errors for several levels of directionalnoise, while varying the pixels noise. It is clear fromthe graphs that the three plus one algorithm is better atestimating rotations than the five point algorithm, evenunder significant error in the directional correspondence,but the five-point method is better at estimating side-ways translation, even in the cases of small error in thedirectional correspondence.
In real experiments, we will used our method to com-pute vision-only relative pose, when points at infinityare present. But first, we compare the performance ofthe five-point and the three-plus-one methods in thisscenario in simulation. The directional correspondencein this case is generated as a projection of a pointat infinity, contaminated with noise and made unit-length. The directional correspondence noise can now bemeasured in pixels, putting the two methods on equalfooting. The results are shown in Figure 5. From thisgraph we conclude that our method outperforms thefive-point method, while using only four image points,in estimating rotation in forward and sideways motion,and translation in forward motion. Our method does aslightly worse job estimating translation in the sidewaysmotion.
9 EXPERIMENTS WITH REAL DATA
In the introduction we specified as one of the main goalsof this work the demonstration of monocular, RANSAC-based visual odometry with a four-correspondence hy-pothesis generator. We used our C++, double-precisionimplementation of the action-matrix-based method totest the algorithm in this context. We used a hand-held,640 × 480 pixel, black and white camera with a 50◦
field of view lens to record an 825-frame, outdoor videosequence for comparison with the five-point algorithm(see sample images in Figure 6 (a)). The second data set
0 1 20
10
20
30Sideways motion
Pixel noise
Epip
ole
erro
r (de
g)
0 1 20
1
2
3
4
5Sideways motion
Pixel noise
Rot
atio
n er
ror (
deg)
0 1 20
10
20
30Forward motion
Pixel noise
Epip
ole
erro
r (de
g)
0 1 20
1
2
3
4
5Forward motion
Pixel noise
Rot
atio
n er
ror (
deg)
3p1 0.03p1 0.253p1 0.53p1 1.03p1 2.05p
3p1 0.03p1 0.253p1 0.53p1 1.03p1 2.05p
3p1 0.03p1 0.253p1 0.53p1 1.03p1 2.05p
3p1 0.03p1 0.253p1 0.53p1 1.03p1 2.05p
Fig. 4. Comparison of the median errors of the three-plus-onealgorithm with the five-point algorithm for the cases of forwardand sideways motion for different directional noise levels. In thelegend, the three-plus-one algorithm is labeled ”3p1”, and thefive-point algorithm is labeled ”5p”. The number after algorithmname indicates the standard deviation of the directional noise indegrees. The green sequence with ’x’ marker corresponds arethe median errors in the five-point algorithm.
0 1 20
5
10
15
20
25
30Sideways motion
Pixel noise
Epip
ole
erro
r (de
g)
0 1 20
1
2
3
4
5Sideways motion
Pixel noise
Rot
atio
n er
ror (
deg)
0 1 20
5
10
15
20
25
30Forward motion
Pixel noise
Epip
ole
erro
r (de
g)
0 1 20
1
2
3
4
5Forward motion
Pixel noise
Rot
atio
n er
ror (
deg)
3p15p
3p15p
3p15p
3p15p
Fig. 5. Comparison of the three-plus-one algorithm with thefive-point algorithm in the case when the directional constraintsare derived from image points at infinity. The plots show medianerrors in pose estimation. The green sequences with the ’x’marker show performance of the five-point algorithm and theblue sequences with the ’*’ marker correspond to the three-plus-one algorithm. The directional correspondences are derivedfrom points at infinity and contaminated with the same pixelnoise as the other image points. This graph shows the superiorperformance of the three-plus-one method in rotation estimationfor forward and sideways motion, as well as translation estima-tion in forward motion.
was recorded with a similar camera from a mobile robotplatform and included high accuracy ground truth (seeFigure 7).
For both data sets we used the monocular schemeas described in [1]. The experiments consisted of usingthe correspondences to estimate camera motion withthe standard five-point algorithm and the new three-plus-one algorithm. We computed 200 hypotheses foreach image pair. The correspondences themselves, thenumber of hypotheses and the other system parametersremained the same, and only the pose hypothesis gener-ator was changed between experiments. The directionalcorrespondence was simply a unitized image point cor-respondence.
9.1 Structure from Motion ResultsIn Figure 6 (b) we stitched together the poses andhighlighted the places where breaks in the path occurred.Since we know that we have enough points to track,the failures are due to RANSAC-based pose estimation

JOURNAL OF LATEX CLASS FILES, VOL. 6, NO. 1, JANUARY 2007 7
! !
!100 0 100 200 300 400
50
100
150
200
250
300
350
400
450
500
550
(a) (b)
Fig. 6. (a) Sample images from our hand-held data set. (b)Estimated camera trajectories for the outdoor data set usingour three-plus-one method (blue) and the five-point algorithm(green). The red squares and circles indicate places wherescale was lost, and trajectory was manually stitched together.Overall, the poses recovered with each method are very similarup to scale. The scale was not reset after stitching, so eachpiece of the trajectory has a different scale. Since the translationis up to scale, the translation units are set arbitrarily. The totallength of the track in the real world was about 430m, of whichwe were able to travel about 230m before the first break underchallenging imaging conditions.
or RANSAC-based scale estimation, and is a result ofa failure to choose an inlier subset. It is interesting tonote that the failures happened in different places withdifferent algorithms due to randomness of sampling. Weexpect more robust results (fewer breaks) from the three-plus-one method, and we found it to be the case due tothe limited number of hypothesis.
To further demonstrate the real-world performance,we collected a 2582-frame video from a mobile robot,where the position of the robot was tracked with aTopcon tracking total station. The resulting trajectory isplotted in Figure 7.
9.2 Structure from Motion Results with a Cameraand an IMU
We investigated using our algorithm to combine visualand inertial data by introducing the gravity vector inthe camera coordinate system as the directional cor-respondence. For this data collection, the camera wasrigidly mounted on a rig with a Microstrain 3DM-GX1 IMU, and data was synchronously acquired fromboth devices. We collected an indoor data set and usedthe visual odometry setup described above to comparethe five-point method with our three-points-plus-gravitymethod. The results are presented in Figure 8. In thisdata set, RANSAC with the five-point hypothesis gen-erator generally performed similarly to our method, butfailed to accurately recover relative pose for one of theframes, resulting in a jump near the bottom left of thetrajectory, and failure to close the loop.
0 5 10 15 20 25
−5
0
5
10
15
20
25
30
X(m)
Y (m
)
(a) (b)
Fig. 7. (a) Sample images from the 2582-frame mobile robotdata set. (b) Trajectories obtained using visual odometry with theproposed hypothesis generator and the ground truth collectedusing a Topcon tracking total station. The three-plus-one visualodometry (solid red) was manually scaled and aligned with theground truth (dashed blue). The results demonstrate that thealgorithm performs correctly in outdoor scenes.
−1
0
1
2
3
4
5
6
−1.5−1−0.500.5
1 2 3 4 5 6 7 8 9 10
z
z
z
z
zz
z
x
z
xx
x
z
x
z
z
y
x
y
y
x
z
x
z
x
z
y
x
x
yy
y
yx
z
yz
x
z
x
x
y
x
y
z
zx
y
y
z
y
z
z
y
xx
z
z
x
x
z
z
y
y
x
y
z
y
zy
x
z
x
z
x
x
y
y
x
y
z
z
x
y
z
x
z
z
y
y
z
y
x
y
x
x
y
xy
xy
y
x
z
x
zyy
yy
z
x
z
x
yy
xx
yy
Fig. 8. Camera trajectories from a short segment of an indoordataset where the reference direction was provided by theIMU. The red solid lines and dashed blue lines connect thecenters of projection determined with our method, the five-pointmethod, respectively. The coordinate axes attached to eachpoint show the rig’s relative orientation in space. The motion wasapproximately a loop, produced by hand, while exercising all sixdegrees of freedom, as seen by the orientation of the coordinateaxis.
10 CONCLUSIONS
We presented two efficient algorithms to determine rel-ative pose from three image point correspondences anda directional correspondence. From our analysis andexperiments we learned that
• The more constrained three-plus-one method does abetter job of estimating rotations than the five-pointmethod.
• Both the closed-form and action-matrix implementa-tions are faster than the five-point method, makingthem attractive for real-time applications.
• The action matrix method yields a solution with bet-ter numerical performance than the simpler, closed-form algorithm, but the differences are not signifi-

JOURNAL OF LATEX CLASS FILES, VOL. 6, NO. 1, JANUARY 2007 8
cant in realistic settings.• Since the action matrix method can perform better
in single precision implementation, it should beconsidered for processors with 32-bit floating-pointarithmetic where extra precision is required.
• When used with RANSAC, smaller minimal data setcan lead to improved robustness.
• The three-plus-one algorithm can provide accurateand robust results in real-world settings when usedwith RANSAC and bundle adjustment, and can beused to perform visual odometry for outdoor sceneswith or without aid from an IMU.
We believe that the real power of this algorithm is that itcan be used as a complement to the five-point algorithmto increase the reliability and speed of visual navigationsystems.
ACKNOWLEDGMENTSThe authors are grateful for support through the follow-ing grants: NSF-IIS-0713260, NSF-IIP-0742304, NSF-IIP-0835714 and ARL MAST-CTA W911NF-08-2-0004.
REFERENCES[1] D. Nister, O. Naroditsky, and J. Bergen, “Visual odometry,” CVPR
2004, vol. 1, pp. I–652 – I–659 Vol.1, Jan 2004.[2] T. Vieville, E. Clergue, and P. Facao, “Computation of ego-motion
and structure from visual and inertialsensors using the verticalcue,” in Computer Vision, 1993. Proceedings., Fourth InternationalConference on, 1993, pp. 591–598.
[3] M. Byrod, K. Josephson, and K. Astrom, “Fast and stable poly-nomial equation solving and its application to computer vision,”International Journal of Computer Vision, Jan 2009.
[4] D. Nister, “An efficient solution to the five-point relative poseproblem,” IEEE PAMI, Jan 2004.
[5] Z. Kukelova and T. Pajdla, “A minimal solution to the autocali-bration of radial distortion,” CVPR 2007.
[6] M. Byrod, Z. Kukelova, K. Josephson, and T. Pajdla, “Fast androbust numerical solutions to minimal problems for cameras withradial distortion,” CVPR 2008, Jan 2008.
[7] M. Bujnak, Z. Kukelova, and T. Pajdla, “A general solution to thep4p problem for camera with unknown focal length,” CVPR 2008,Jan 2008.
[8] H. Stewenius, C. Engels, and D. Nister, “An efficient minimalsolution for infinitesimal camera motion,” CVPR, Jan 2007.
[9] H. Stewenius, “Grobner basis methods for minimal problems incomputer vision,” maths.lth.se, Jan 2005.
[10] M. Byrod, K. Josephson, and K. Astrom, “Improving numericalaccuracy of grobner basis polynomial equation solver,” ICCV2007, 2007.
[11] M. Kalantari, A. Hashemi, F. Jung, and J. Guedon, “A newsolution to the relative orientation problem using only 3 pointsand the vertical direction,” arXiv, vol. cs.CV, May 2009.
[12] F. Fraundorfer, P. Tanskanen, and M. Pollefeys, “A minimal casesolution to the calibrated relative pose problem for the case oftwo known orientation angles,” Computer Vision–ECCV 2010, pp.269–282, 2010.
[13] J. Lobo and J. Dias, “Vision and inertial sensor cooperation usinggravity as a vertical reference,” IEEE PAMI, vol. 25, no. 12, pp.1597–1608, 2003.
[14] D. Cox, J. Little, and D. O’Shea, “Ideals, varieties, and algo-rithms,” Springer, Jan 1997.
[15] Z. Kukelova, M. Bujnak, and T. Pajdla, “Automatic generator ofminimal problem solvers,” ECCV, Jan 2008.
[16] D. Cox, J. Little, and D. O’Shea, “Using algebraic geometry,”Springer, Jan 2005.
[17] M. Armstrong, A. Zisserman, and R. Hartley, “Self-calibrationfrom image triplets,” ECCV’96, pp. 1–16, 1996.
[18] M. Fischler and R. Bolles, “Random sample consensus,” Commu-nications of the ACM, Jan 1981.
APPENDIX ACLOSED-FORM COEFFICIENTS
In this appendix we list the coefficients for the closed-form solution presented in Section 4. The coefficientsaij are found in equation (5). The coefficients gi in thepolynomial (11) are as follows:
g1 = −a11a23a32 + a13a21a32 − a12a21a33 + a11a22a33++ a23a12a31 − a13a22a31,
g2 = −a24a11a32 + a14a21a32 − a12a21a34 + a11a22a34++ a12a24a31 − a14a22a31
g3 = −a23a16a31 + a13a26a31 + a23a12a35 − a13a22a35−− a11a26a33 + a15a22a33 + a21a16a33 − a25a12a33−− a15a23a32 + a13a25a32 + a11a23a36 − a13a21a36
g4 = −a23a16a32 − a24a16a31 + a13a26a32 + a14a26a31−− a11a23a35 + a12a24a35 + a13a21a35 − a14a22a35−− a11a26a34 − a12a26a33 + a15a22a34 − a15a21a33++ a21a16a34 + a22a16a33 − a25a12a34 + a25a11a33++ a15a23a31 − a15a24a32 − a13a25a31 + a14a25a32++ a24a11a36 + a23a12a36 − a13a22a36 − a14a21a36
g5 = −a24a16a32 + a14a26a32 − a24a11a35 + a14a21a35−− a12a26a34 − a15a21a34 + a22a16a34 + a25a11a34++ a15a24a31 − a14a25a31 + a12a24a36 − a14a22a36
g6 = −a23a16a35 + a13a26a35 − a15a26a33 + a25a16a33++ a15a23a36 − a13a25a36
g7 = −a24a16a35 + a14a26a35 − a15a26a34 + a25a16a34++ a15a24a36 − a14a25a36,
(14)
where aij come from (5). The coefficients of the quarticpolynomial in c are
h0 = −g21 − 2g1g6 − g2
6 + g23
h1 = 2g3g2 − 2g4g6 + 2g3g7 − 2g4g1
h2 = −g24 + g2
1 + g26 + g2
2 + g27 − 2g2
3 + 2g1g6 + 2g2g7 + 2g3g5
h3 = 2g4g1 + 2g4g6 + 2g5g2 + 2g5g7 − 2g3g2 − 2g3g7
h4 = g24 + g2
5 + g23 − 2g3g5.
(15)
The quartic equation built from the coefficients hi yieldsthe solution for c.
APPENDIX BELIMINATION TEMPLATE MATRIX
In this appendix we give the structure of the 21 × 25coefficient matrix C used in Section 5. The coefficientsaij are found in equation (5). From each of the fivevectors listed in (16) we create three rows of C whenwe substitute the coefficients aij for i = 1, 2, 3. Theserows come from the coefficients of equation (3).
The last six rows C16..21,1..25 come from the coefficientsof equation (4) and are shown in equation (17).

JOURNAL OF LATEX CLASS FILES, VOL. 6, NO. 1, JANUARY 2007 9
[ai4 ai3 0 0 0 0 ai5 0 ai1 0 0 −ai2 0 0 0 0 0 0 0 0 ai6 0 0 0 0
][0 ai4 ai1 ai3 0 0 0 0 0 ai5 0 ai1 −ai2 0 0 0 ai6 0 0 0 0 0 0 0 0
][0 0 0 0 ai2 ai4 ai1 ai3 0 0 0 0 0 ai5 0 0 0 0 0 ai1 −ai2 0 ai6 0 0
][0 0 0 0 0 0 ai2 ai4 0 ai1 ai3 0 0 0 ai5 0 −ai2 0 0 0 ai1 0 0 ai6 0
][0 0 0 0 0 0 0 0 0 0 0 0 0 ai2 ai1 ai3 0 ai5 ai4 0 0 0 ai1 −ai2 ai6
](16)
1 0 0 1 0 0 0 0 0 0 0 0 0 0 0 −1 0 0 0 0 0 0 0 0 00 0 1 0 0 0 0 0 0 0 0 0 0 0 −1 0 0 0 0 0 0 0 0 0 00 0 0 0 1 0 0 0 0 1 0 0 0 0 0 0 0 −1 0 0 0 0 0 0 00 0 0 0 0 1 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 −1 0 0 00 0 0 0 0 0 0 0 1 0 0 0 1 0 0 0 0 0 0 0 0 0 0 −1 00 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 1 0 0 0 0 −1
(17)












![Active End-Effector Pose Selection for Tactile Object Recognition through …kostas/mypub.dir/mabel17iros.pdf · 2017-09-26 · Schneiter [9] scheduled sensor motions based on [2]](https://img.pdfslide.net/doc/110x75/5f5aa73fe725c947fa11a7a1/active-end-effector-pose-selection-for-tactile-object-recognition-through-kostasmypubdir.jpg)