Embed Size (px)
Citation preview

Fl
Xa
b
a
ARRAA
KPSSFT
1
t
macapccl
tbbp[ha
p
h0
Journal of Process Control 24 (2014) 1609–1626
Contents lists available at ScienceDirect
Journal of Process Control
j ourna l ho me pa ge: www.elsev ier .com/ locate / jprocont
uzzy modeling and stable model predictive tracking control ofarge-scale power plants
iao Wua,∗, Jiong Shena, Yiguo Lia, Kwang Y. Leeb
Department of Energy Information and Automation, Southeast University, Nanjing 210096, ChinaDepartment of Electrical and Computer Engineering, Baylor University, One Bear Place #97356, Waco, TX 76798-7356, USA
r t i c l e i n f o
rticle history:eceived 21 November 2013eceived in revised form 17 June 2014ccepted 6 August 2014vailable online 2 September 2014
eywords:ower planttable model predictive controlubspace identificationuzzy clusteringS-fuzzy model
a b s t r a c t
This paper develops a stable model predictive tracking controller (SMPTC) for coordinated control ofa large-scale power plant. First, a Takagi–Sugeno (TS) fuzzy model is established to approximate thebehavior of the boiler–turbine coordinated control system (CCS) using fuzzy clustering and subspaceidentification (SID). Then, an SMPTC is designed based on the fuzzy model to track the power and pressureset-points while guaranteeing the input-to-state stability and the input constraints of the system. Anoutput-based objective function is adopted for the proposed SMPTC so that the controller could be directlyapplicable for the data-driven model. Moreover, the effect of modeling mismatches and unknown plantvariations has been overcome by the use of a disturbance term and steady-state target calculator (SSTC).Simulation results for a 600 MW power plant show that an off-set free tracking performance can beachieved over a wide range load variation.
© 2014 Elsevier Ltd. All rights reserved.
. Introduction
Thermal power plant is the most widely used facility for power generation, which is composed by the boiler, turbine and generator toransform the fuel chemical energy into electric energy.
For a thermal power plant, the main task of the control system is to regulate the power output to meet the demand of the grid whileaintaining the throttle pressure within a given tolerance to keep the power plant in a safe operating condition. Such an object is gener-
lly achieved by the multi-loop proportional–integral–derivative (PID) controllers, under either the boiler-following or turbine-followingontrol mode [1]. However, in the context of increasing power demand as well as the energy and environmental issues, power plantsre increasing in size and becoming more complex in order to achieve high efficiency and the scale of economy. Therefore, power plantsresent a challenging control problem owing to the behaviors such as: severe nonlinearity over a wide operation range, tight operatingonstraints, strong coupling among the multitude of variables, unknown disturbances and plant parameter variations. Consequently, theonventional PI/PID based controllers are no longer sufficient in meeting performance specifications, even if they are well tuned at a givenoad level; thus, various control strategies have been extensively studied [1–20].
As a direct approach to improve the conventional PI/PID controller, auto-tuning of the PID parameters is studied in [1–4] utilizinghe fuzzy logic, particle swarm optimization (PSO) and iterative feedback tuning (IFT). In [5], a single linear controller is designed on theasis of careful choice of the operating range to avoid severe nonlinearity. In [6], a gain-scheduled l1-optimal approach is designed for theoiler–turbine unit based on the linear parameter varying model. In [7,8], H∞ controllers are proposed to enhance the robustness of powerlant control system. To overcome the nonlinearity of the power plant, various artificial intelligence techniques have also been applied. In9], a fuzzy auto-regressive moving average (FARMA) controller was applied to the boiler–turbine system with rules generated using the
istory of input–output data. In [10], a linear quadratic regulator (LQR) controller is designed for the boiler–turbine through the geneticlgorithm.However, none of these controllers except [6] have dealt with the input constraints in the controller design stage; therefore, modelredictive controller (MPC) has been employed in recent years. In [11], a dynamic matrix control (DMC) is employed for the boiler–turbine.
∗ Corresponding author. Tel.: +86 13645166145; fax: +86 25 83795951.E-mail addresses: [email protected] (X. Wu), [email protected] (J. Shen), [email protected] (Y. Li), Kwang Y [email protected] (K.Y. Lee).
ttp://dx.doi.org/10.1016/j.jprocont.2014.08.007959-1524/© 2014 Elsevier Ltd. All rights reserved.

1
Ipbo
nif(cHb
tndaf
pipfsl
wtetk
occ
2
pip
mhnbc
3
oma(
[bimib
610 X. Wu et al. / Journal of Process Control 24 (2014) 1609–1626
t shows that the step-response model based on the test data is better suited than using the linearized mathematical model, but theerformance of the proposed linear controller is degraded in a wide range operation. In [12,13] nonlinear predictive controllers are designedased on the neural network model and input–output feedback linearization. Although the control performance is improved, the nonlinearptimization is time consuming and lacks robustness.
To overcome these issues, the fuzzy modeling technique [21], which uses a combination of several linear models to approximate theonlinear behavior of the plant, has been widely used in controller design for a wide range power plant operation [14–19], resulting
n better performance than the conventional MPC methods. In [14–18], various kinds of MPCs are proposed on the Takagi–Sugeno (TS)uzzy model for the boiler–turbine coordinated system, utilizing different computational algorithms, such as linear matrix inequalitiesLMIs) [14], genetic algorithm (GA) [15,17], quadratic programming (QP) [16], and iterative learning [18]. In [19], a generalized predictiveontroller (GPC) is designed on the basis of neuro-fuzzy network model to control the steam temperature system of a 200 MW power plant.owever, the stability of the control system which is desirable for industrial processes such as thermal power plant cannot be guaranteedy all of the aforementioned approaches, except [14,15].
On the other hand, it is common that, state-space models are used as local models in these fuzzy controllers [8,14–17] because ofhe advances in multi-variable systems and control theory for linear systems. In these works, an approximation or transformation of theonlinear system has been used to obtain the linear state-space models. However, for complex systems such as large-scale power plant, it isifficult to develop an accurate analytical model without the knowledge of thermodynamics and design specifications of many components,nd this has become one of the main limitations in designing controllers for real power plants. Moreover, except [15] the structure of theuzzy model is designed by simply dividing the operation range evenly, which greatly affects the accuracy of the model.
For these reasons, we propose a stable model predictive tracking controller (SMPTC) based on the data-driven fuzzy model to solveower plant control problems. Firstly, a TS fuzzy model is developed to approximate the behavior of the coordinated control system (CCS)
n the power plant. Compared with the ordinary methods which linearize the nonlinear mathematical model around different operatingoints [8,14–18], we propose the use of fuzzy clustering [22] and subspace method [23–25] to identify the local state-space model directlyrom input–output data. To overcome the nonlinearity of the power plant, fuzzy clustering is first used to develop the structure of the fuzzyystem and the membership functions, and then by combining the data with the membership functions, the SID is extended to develop allocal state-space models.
The SMPTC is then designed on the developed fuzzy model to achieve a satisfactory power output and throttle pressure performance,hile satisfying the input constraints and guaranteeing the closed-loop system stability. To improve the output tracking performance of
he conventional stable MPC, an output-based objective function is used in the SMPTC formulation. Offset-free control is also achieved,ven in the case of modeling mismatches and unknown plant behavior variations, by introducing a disturbance term and steady-statearget calculator (SSTC) [26,27]. It is shown that the SMPTC can be realized by solving a set of linear matrix inequalities (LMIs), which isnown to be a computationally efficient algorithm [14,28–30].
The proposed modeling and control approaches are applied to the CCS in a 600 MW large-scale power plant simulator. The remainderf this paper is organized as follows: Section 2 describes the power plant. Section 3 establishes the TS-fuzzy model of the CCS using fuzzylustering and subspace identification. The SMPTC is developed in Section 4, and simulation results are given in Section 5. Finally, someonclusions are drawn in Section 6.
. System description
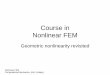
The power plant under consideration is a 600 MW oil-fired drum-type boiler–turbine–generator unit shown in Fig. 1. The model of thislant is developed from the first-principles as used in a power plant simulator and is validated in the MATLAB environment. The model
s grouped into boiler, turbine, feedwater, and condenser modules and composed of 31 subsystems and 12 control valves associated withhysical processes as shown in Fig. 1 [3].
As two of the most critical variables in a power plant, the power output E and throttle pressure P are controlled by the CCS throughanipulating primarily the fuel flow valve u1 and turbine governor valve u8. However, the variables are strongly coupled and the fuel flow
as a relatively large thermal inertia property to the power and pressure. Moreover, the frequent unit load demand change brings severeonlinearity to the CCS, and furthermore, the equipment wear, environmental change, fuel variation, etc., will result in significant distur-ances and plant behavior variations. Therefore, advanced control techniques are needed to overcome the weaknesses of the conventionalontrollers.
. Data-driven fuzzy modeling of the boiler–turbine coordinated control system
Subspace identification (SID) method provides an effective way to develop the state-space model directly from the input–output dataf the plant [23,24]. Based on computational tools such as QR-factorization and singular value decomposition (SVD), the SID extracts theodel from subspaces of data Hankel matrices. Comparing with the conventional identification methods, the SID has several distinct
dvantages, such as: (1) computationally efficient, especially for multivariable systems; (2) avoid local minima and convergence problems;3) no requirement for initial conditions; and (4) the system order can be easily chosen.
However, the SID is only for linear system identification, while the power plant has inherent nonlinearity due to the load variations12–20]. In [20], the whole operating region of the plant is first divided by using a nonlinear analysis tool (Vinnicombe gap metric, toe specific [31]), and the corresponding data for each region are collected to identify the local models separately. Then, switching point
nformation is utilized to transform all local models into a common basis to form an integrated multi-model system. Although the resultingodel can approximate the plant behavior closely, the modeling procedure is complex and greatly relying on human knowledge and
ntervention. As an alternative to the approach in [20], the fuzzy modeling strategy is adopted in this paper to solve the nonlinear problemy combining the fuzzy clustering with the SID.

X. Wu et al. / Journal of Process Control 24 (2014) 1609–1626 1611
wif
w
Itt
3
ams
d[
Nd
am
Fig. 1. Large-scale 600 MW power plant model [3].
Suppose the following discrete fuzzy model can be used to present the CCS with both fuzzy inference rules and local state-space models:
Ri : IF ϕ(k) ∈ Mi, THEN :{x(k + 1) = Aix(k) + Biu(k)
y(k) = Cix(k) + Diu(k), i = 1, 2, . . ., L
(1)
here Ri denotes the ith fuzzy inference rule, L the number of fuzzy rules, Mi the fuzzy sets, x(k) ∈ �n the state vector, u(k) ∈ �m the controlnput vector, and y(k) ∈ �p the output vector. The matrices Ai, Bi, Ci, Di are local system matrices, and ϕ(k) is the antecedent vector of theuzzy model, which is also the clustering input, composed by current and past measurable variables of the plant.
Let ωi(k) be the normalized membership function of the fuzzy set Mi, then the fuzzy model (1) can be expressed in a global form:{x(k + 1) = Aωx(k) + Bωu(k)
y(k) = Cωx(k) + Dωu(k)(2)
here Aω =∑Li=1ωi(k)Ai, ωi(k) ∈ [0, 1],
∑Li=1ωi(k) = 1, and other matrices are defined in the similar way.
Modeling of the fuzzy system consists of two parts: the premise (structure) design and the consequence (local model parameters) design.n this section, we first use the fuzzy clustering to determine the structure of the fuzzy model, i.e., the number of the local models L, andhe membership functions ωi; and then the SID is used to determine the model parameters {Ai, Bi, Ci, Di} through the input/output data ofhe plant and the corresponding membership functions.
.1. Premise design using fuzzy clustering
Clustering has been widely accepted as an effective method for designing the premise part of the fuzzy model. It classifies the dataccording to similarities and organizes the data into groups or clusters. The number of the clusters is corresponding to the number of localodels and the clustering centers can be used to calculate the membership functions. A satisfactory clustering can provide an appropriate
tructure design without much experience on, or nonlinear analysis of the plant.Before performing the clustering, it is important to select the clustering input vector ϕ(k). For the CCS of power plant, because the
ynamics are greatly relying on the power level, throttle pressure as well as the valve positions, the clustering input is chosen as: ϕ(k) =E(k − 1), P(k − 1), u1(k − 1), u8(k − 1)] in this paper.
Thus, the data set for clustering, X , can be constructed as: X = {X(k)|k = 1, 2. . .N} with the kth sample X(k) = [ϕ(k), E(k), P(k)]T , where is the number of the samples. The goal of clustering is then to find L clustering centers Vi, i = 1, 2, . . ., L, such that some measure of theistance between all samples X and the cluster centers V is minimum.
k iA modified Gaustafson–Kessel (G–K) clustering algorithm [22] is employed for this purpose, owing to its distinct features such as: localdaptation of the distance metric to the shape of the cluster and relative insensitivity to the data scaling and initialization of the partitionatrix defined below.

1
m
wwc
i
t
d
u
t
w
wc
3
sHpw
fia
612 X. Wu et al. / Journal of Process Control 24 (2014) 1609–1626
The G–K clustering is an objective function based clustering, which tries to find L clustering centers Vi, i = 1, 2, . . ., L, and the partitionatrix U = [�ik] ∈ [0, 1]L×N from the data set X , such that the following objective function is minimum:
J(X; U, V, A) =L∑
i=1
N∑k=1
(�ik)mD2ikAi
(3)
here �ik is the value of the membership function of the kth sample for the ith fuzzy set in the data set X , m ∈ [1, ∞] is a scalar parameterhich determines the fuzziness of the resulting clusters, generally set as m = 2, and DikAi
denotes the distance between a sample Xk and aluster center Vi, which also determines the geometrical shapes of the clustering:
D2ikAi
= (Xk − Vi)T Ai(Xk − Vi) (4)
n which the positive definite matrix Ai is obtained by:
Ai = [�i det(Fi)]1/NF−1
i
Fi =∑N
k=1(�ik)m(Xk − Vi)(Xk − Vi)T∑N
k=1(�ik)m
(5)
As a nonlinear optimization problem, the analytic solutions of the G–K clustering is difficult to obtain; thus an iterative method is usedo minimize the objective function, which calculates the cluster centers at the lth iteration by:
V (l)i
=∑N
k=1(�(l−1)ik
)m
Xk∑Nk=1(�(l−1)
ik)m (6)
Then the fuzzy covariance matrix Fi and the distance value DikAican be updated through (5) and (4), and the partition matrix can be
etermined by:
�(l)ik
= 1∑Lj=1(DikAi
/DjkAj)2/(m−1)
(7)
ntil ||U(l) − U(l−1)|| ≤ ε,which is the termination tolerance. The detailed algorithm can be found in [22].Once the L clustering centers Vi, i = 1, 2, . . ., L are obtained, we extract the input centers Vϕ
ifrom them, which are set as the centers of
he fuzzy set Mi. Then, for a given input vector ϕ(k), a Gaussian-type membership function can be calculated through Vϕi
:
wi(k) = exp
⎡⎣−(∥∥ϕ(k) − Vϕ
i
∥∥�i
)2⎤⎦ (8)
here �i is the width of the membership function:
�i = 1ˇ
[1j
j∑l=1
∥∥Vi − Vl
∥∥] (9)
ith Vl, l = 1,2,. . ., j being the j closest centers to the center Vi. We set j = 1 and = 4 in this paper and the normalized membership functionan be calculated by:
ωi(k) = wi(k)∑Li=1wi(k)
(10)
Thus, we have now successfully developed the premise part of the fuzzy model.
.2. Consequence design using subspace identification
Considering the global fuzzy model (2), the remaining problem can now be formulated as: given the input sequence u(k), outputequence y(k) and their corresponding membership functions ω(k) over a time k = 1, 2, . . ., N, find the system matrices Ai, Bi, Ci, and Di.owever, since model (2) is dependent on the membership functions, the global system matrices will be different for different operatingoint at each time step. This will make the data matrices involved in the SID grow exponentially with the size of the prediction time [32,33],hich makes it difficult to implement.
To handle this problem, a simplifying assumption is made that only the input matrices Bi and Di are dependent on the membershipunctions, and other matrices except these two, i.e., A and C, are assumed to be independent of the membership functions (e.g., Ai = Aj = A,, j = 1, 2, . . ., L). Under this assumption, the input data can be combined with the membership functions before performing the SID. Anpproximate fuzzy model is then defined as following:
{x(k + 1) = Ax(k) + Bωu(k)
y(k) = Cx(k) + Dωu(k)(11)

[b
w
c
Rfttmi
3
SS
SS
S
S
Rlobb
4
d
4
m
wH
X. Wu et al. / Journal of Process Control 24 (2014) 1609–1626 1613
Note that Bωu(k) =∑L
i=1ωi(k)Biu(k) = B[ω(k) ⊗ u(k)] and Dωu(k) =∑L
i=1ωi(k)Diu(k) = D[ω(k) ⊗ u(k)], where B = [B1 B2. . .BL], D =D1 D2. . .DL], the membership function vector ω(k) = [ω1(k)ω2(k). . .ωL(k)]
T, and ⊗ presents the Kronecker product. Model (11) can then
e rewritten as:{x(k + 1) = Ax(k) + Bu(k)
y(k) = Cx(k) + Du(k)(12)
here u(k) ≡ ω(k) ⊗ u(k) is the mixed input resulting from the fuzzy membership functions.Therefore, by combining the input data with their corresponding membership functions, the standard SID can be extended to find the
onsequence of the fuzzy model directly. The algorithm of the SID can be found in [23–25] and is not repeated here.
emark 3.1. This simplification brings a significant advantage in utilizing the SID, although the nonlinear approximation ability of theuzzy model is not fully utilized. However, since (i) the matrices Bω , Dω are dependent on the fuzzy membership functions, through whichhe input is coupled to the local models; and (ii) the idea of this simplification is consistent with the idea of fuzzy modeling, which is: usinghe combination of several simple models to approximate the behavior of a complex system; and (iii) if necessary, the accuracy of the
odel can be improved by further adjusting the number and position of the cluster centers and membership functions, this simplifications reasonable and the resulting model can attain a satisfactory accuracy.
.3. Summary of the data-driven fuzzy modeling
The whole procedure of the data-driven fuzzy modeling can now be summarized as following:
tep 1: Collect the input–output data of the plant u(k), y(k), k = 1, 2, . . ., N;tep 2: Perform the fuzzy clustering to determine the cluster centers Vi and calculate the width of the membership functions �i, i = 1, 2,
. . ., L, with (9);tep 3: Calculate the membership function ω(k) for the input–output data, and calculate the mixed input u(k) = ω(k) ⊗ u(k);tep 4: Select the maximum order N of the system and build the data Hankel matrices using the output and mixed input data y(k), u(k),
k = 1, 2, . . ., N;tep 5: Perform the QR-factorization and the singular value decomposition (SVD) to build the extended observability matrix (system order
n, n ≤ N, is selected during the SVD);tep 6: Extract the state-space matrices (A, B, C, D) and get the local matrices Bi, Di, i = 1, 2, . . ., L from B and D.
emark 3.2. Compared with the method in [20], the proposed method has the following advantages: (1) the fuzzy model structure andocal model identification are strongly linked, thus, the integral fuzzy modeling procedure is simple and direct; (2) division of the wholeperation range is determined by the clustering, thus less human intervention is needed; (3) it is more efficient since all local models cane identified together at once; (4) compared with the piecewise linear model in [20], the resulting fuzzy model has smooth transitionetween local models, thus naturally provides bumpless control.
. Stable model predictive tracking control
With the fuzzy model obtained in the previous section, various advanced controllers can be designed. To deal with the aforementionedifficulties of the CCS, a stable model predictive tracking controller is proposed in this section.
.1. Offset-free output tracking
To achieve the offset-free output tracking, a disturbance term d(k) ∈ Rnd is introduced to the fuzzy model (2) to lump the effect of allodeling mismatches and unknown plant variations [26,27]:{
x(k + 1) = Aωx(k) + Bωu(k) + Eωd(k)
y(k) = Cωx(k) + Dωu(k) + Fωd(k)(13)
Since the state variables of the identified model and the disturbances are unmeasured, the following fuzzy observer is first designed:⎧⎪⎨⎪⎩[
x(k + 1)
d(k + 1)
]=[
Aω Eω
0 I
][x(k)
d(k)
]+[
Bω
0
]u(k) +
[L1
z
L2z
][y(k) − y(k)]
y(k) = Cωx(k) + Dωu(k) + Fωd(k)
(14)
here the symbol “∧” indicates the estimate. Following the method in [34], we can construct a stable fuzzy observer if there exist matrices and Gi, and a symmetric positive definite matrix X, such that the following LMI problem is feasible:
[HT + H − X ∗HAaug
i+ GiC
augi
X
]> 0, i = 1, 2, . . ., L (15)

1
i
ad
R
f
s
io
Rt
wb
w
4
tm
i
mmr
wp
614 X. Wu et al. / Journal of Process Control 24 (2014) 1609–1626
n which the augmented matrices are defined by
Aaugi
=[
Ai Ei
0 I
]
nd Caugi
= [ Ci Fi ], and “*” in the matrix stands for the corresponding terms in the symmetric matrix. Then the observer gains can beetermined by
Li = H−1Gi = [ L1T
iL2T
i]T, i = 1, 2, . . ., L.
emark 4.1. To ensure the observability of the state variables and disturbance term, the following condition needs to be satisfied:
rank
[I − Ai −Ei
Ci Fi
]= n + nd (16)
or all i [26,27].The disturbance term is then used to construct a steady-state target calculator (SSTC) [26,27] to estimate the equilibrium values of the
tate and input targets (xs(k), us(k)) by solving the following QP problem at each sampling time k:
minxs(k),us(k)
(us(k) − uref )T (us(k) − uref ) (17)
s.t. xs(k) = Aωxs(k) + Bωus(k) + Eωd(k) (18)
yref = Cωxs(k) + Dωus(k) + Fωd(k) (19)
umin ≤ us(k) ≤ umax (20)
n which uref and yref are desired input and output set points, respectively, and umin and umax are, respectively, the lower and upper limitsf the input.
emark 4.2. If the unknown disturbance would reach a steady-state value asymptotically, the solution results in an offset-free outputracking for the controller [26,27].
Once the optimal steady-state set-point (xs(k), us(k)) is obtained, by subtracting (18) and (19) from (13), we can get:{x(k + 1) = Aωx(k) + Bωu(k) + Eωd(k)
y(k) = Cωx(k) + Dωu(k) + Fωd(k)(21)
here x(k) = x(k) − xs(k), u(k) = u(k) − us(k), y(k) = y(k) − yref and d(k) = d(k) − d(k). Noting that the disturbance estimation error d(k) isounded with the help of the observer, we can use the nominal model of (21) as the prediction model:{
x(k + N + 1|k) = Aωx(k + N|k) + Bωu(k + N|k)
y(k + N|k) = Cωx(k + N|k) + Dωu(k + N|k)(22)
here N ≥ 0.
.2. Stable MPC using an output objective function
The stability theory of MPC design has been well established, where an infinite-horizon objective function is adopted and the Lyapunovheory is used to ensure the stability and find the upper-bound of the objective function [14,28–30]. The control input can be solved by
inimizing this upper-bound while subjecting to the stability and input constraints in the form of LMIs.In all of these works a state-variable based objective function
J∞0 (k) =∞∑
N=0
[xT (k + N|k)Q0x(k + N|k) + uT (k + N|k)R0u(k + N|k)] (23)
s employed, so that the Lyapunov stability condition can be constructed directly.For a fuzzy model derived from analytical model, such objective function may easily yield a good performance by tuning of weighting
atrices, because the relationship between state and output variables are generally simple [14,28–30]. However, for the subspace identifiedodel, it is difficult to tune the weighting matrices, because the state variables in the model do not have real physical meaning and the
elationship between state and output variables are not transparent.For this reason, we modify the conventional stable MPC by using the output-based objective function:
J∞(k) =∞∑
[yT (k + N|k)Q y(k + N|k) + uT (k + N|k)R u(k + N|k)] (24)
0N=0
0 0
here Q0 = Q T0 > 0, R0 = RT
0 > 0 are symmetric positive definite weighting matrices for output and control input, respectively, and weresent the following main result:

Twk
m
tubs
i
m
X. Wu et al. / Journal of Process Control 24 (2014) 1609–1626 1615
heorem 1. Consider the discrete fuzzy system (13) under input constraint: umin ≤ u(k + N|k) ≤ umax, �umin ≤ �u(k + N|k) ≤ �umax, N≥0,ith the fuzzy observer (14) determined by LMIs (15) and steady-state set-points (xs(k), us(k)) calculated by the SSTC (17)–(20) at sampling time
.If there exist Nf -step free control sequence
U(k) = [uT (k|k), uT (k + 1|k), . . ., uT ((k + Nf − 1|k))]T
(25)
atrices Yi, G, and symmetric positive definite matrix S, such that the following LMI problem is feasible:
min,U(k),Yi,G,S
s.t. (27) − (30)(26)
hen, at every sampling time k, through minimizing the upper bound of the infinite horizon objective function, , a sequence of free control input,(k + N|k) = u(k + N|k) + us(k), for 0 ≤ N < Nf and a feedback control law u(k + N|k) = YωG−1x(k + N|k) + us(k), for N≥Nf can be determinedy the proposed predictive controller to track the set-points optimally while satisfying input constraints and guaranteeing the input-to-statetability of the closed-loop system:
where⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
1 ∗ ∗ ∗ ∗
lx(k)xs(k) + lu(k)U(k)S
20 0 0
Q 1/2(Lx(k)xs(k) + Lu(k)U(k)) 0I
20 0
R1/2U(k) 0 0 I 0
lx(k)w 0 0 0S
2
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
≥0 (27)
⎡⎢⎢⎢⎢⎣
G + GT − S ∗ ∗ ∗(AiG + BiYi) S 0 0
Q 1/20 (CiG + DiYi) 0 I 0
R1/20 Yi 0 0 I
⎤⎥⎥⎥⎥⎦> 0 i = 1, 2, . . ., L (28)
⎡⎢⎢⎢⎢⎣
Im
Im
...
Im
⎤⎥⎥⎥⎥⎦ (umin − us(k)) ≤ U(k) ≤
⎡⎢⎢⎢⎢⎣
Im
Im
...
Im
⎤⎥⎥⎥⎥⎦ (umax − us(k)) (29)
⎡⎢⎢⎢⎢⎣
Im
Im
...
Im
⎤⎥⎥⎥⎥⎦umin ≤ �
⎡⎢⎢⎢⎢⎢⎢⎣
u(k − 1)
U(k) +
⎡⎢⎢⎢⎢⎣
Im
Im
...
Im
⎤⎥⎥⎥⎥⎦us(k)
⎤⎥⎥⎥⎥⎥⎥⎦
≤
⎡⎢⎢⎢⎢⎣
Im
Im
...
Im
⎤⎥⎥⎥⎥⎦umax (30)
n which Q = INf⊗ Q0, R = INf
⊗ R0, w is the upper bound of the state estimation error, |x| ≤ w, xs(k) = x(k) − xs(k) and
� =
⎡⎢⎢⎢⎢⎢⎢⎣
−Im Im 0 . . . 0
0 −Im Im . . ....
......
. . .. . . 0
0 · · · 0 −Im Im
⎤⎥⎥⎥⎥⎥⎥⎦
.
Furthermore, to simplify the computation, we assume that the fuzzy model is fixed over the prediction horizon, and the predictionatrices in (27) are given as:
lx(k) = [Aω(k)]Nf ;
lu(k) =[
[Aω(k)]Nf −1 [Aω(k)]Nf −2 . . . [Aω(k)]0]
Bω(k);

1616 X. Wu et al. / Journal of Process Control 24 (2014) 1609–1626
ct
c
5
mo
5
2acsrvtA
o
F
Fig. 2. Working principle of the SMTPC.
Lx(k) =
⎡⎢⎢⎢⎢⎣
Cω(k)
Cω(k)Aω(k)
...
Cω(k)[Aω(k)]Nf −1
⎤⎥⎥⎥⎥⎦ ;
Lu(k) =
⎡⎢⎢⎢⎢⎣
Dω(k) 0 · · · 0
Cω(k)Bω(k) Dω(k) · · · 0
.... . . · · · 0
Cω(k)[Aω(k)]Nf −2Bω(k) · · · Cω(k)Bω(k) Dω(k)
⎤⎥⎥⎥⎥⎦ .
The LMI (27) ensures that � is the upper-bound of the objective function (24), while (28) ensures the input-to-state stability of thelosed-loop system, and (29) and (30) respectively give the magnitude and rate constraints for the free control sequence (25). The proof ofhe theorem is given in Appendix A.
The working principle of this SMPTC is shown in Fig. 2. At each sampling time, the first control input u(k|k) in the control sequence ishosen as the current control action to be implemented on the plant.
. Simulation results
This section demonstrates the data-driven modeling strategy and SMPTC design for the CCS of a power plant. Accuracy of the fuzzyodel is demonstrated first, and then the proposed controller are tested and compared with a conventional PI controller and other types
f predictive controllers.
.1. Verification of fuzzy model
The designers of this 600 MW power plant simulator provide an operation range between (600 MW, 2415.5 psig) and (500 MW,114.9 psig) for a typical load cycle [3]. In this section, we extend the lower bound to (450 MW, 2000 psig), representing a wide oper-tion range for the power plant, and transitions within this range is considered. In order to overcome the significant nonlinearity andorrectly capture the dynamics of the CCS within this operation range, fuzzy modeling technique is utilized and the input sequenceshown in Fig. 3 are designed to generate data. The power plant simulator can generate data every 0.1 s, however, such a small samplingate will focus too much on the identification of noise. Considering both the slow dynamics of fuel flow and the fast dynamics of turbinealve, the sampling time is selected as 1 second and the identified model outputs are shown in Fig. 4, with the number of clusters L = 6 andhe SID parameter N = 10. It can be seen that the resulting fuzzy model has very high precision. The identified TS fuzzy model is given inppendix B.
A single linear model developed by the SID method using the same data is also tried for comparison; however, due to the high nonlinearityf the plant, it leads to a non-convergent result.
To further test the accuracy of the identified model, another group of data is used for validation as shown in Figs. 5 and 6. The result inig. 6 shows that the fuzzy model can capture the CCS dynamics correctly in terms of trend and time constant. The figure also shows a little

X. Wu et al. / Journal of Process Control 24 (2014) 1609–1626 1617
0.6
0.7
0.8
Fuel F
low
Valv
e
0 100 200 300 400 500 600 700 800 900 1000
0.5
0.6
0.7
0.8
Sample Numbe r
Turb
ine G
overn
or
Valv
e
Fig. 3. Input sequences used in the fuzzy model identification.
450
500
550
600
Pow
er
Outp
ut
(MW
)
0 100 20 0 30 0 400 50 0 600 700 80 0 90 0 100 02000
2100
2200
2300
2400
2500
Sample Number
Thro
ttle
Pre
ssure
(P
sig
)
Fig. 4. Fuzzy model identification for the CCS (solid in red: estimated outputs; dotted in blue: real outputs). (For interpretation of the references to color in this figure legend,the reader is referred to the web version of the article.)
0.6
0.7
0.8
Fu
el F
low
Va
lve
0 100 200 300 400 500 600 700 800 900 10000.5
0.6
0.7
0.8
Sample Number
Tu
rbin
e G
ove
rno
r V
alv
e
Fig. 5. Input sequences used in the fuzzy model verification.

1618 X. Wu et al. / Journal of Process Control 24 (2014) 1609–1626
480
520
560
600
Po
we
r O
utp
ut (M
W)
0 100 200 300 400 500 600 700 800 900 1000210 0
220 0
230 0
240 0
Sample Number
Th
rottle
Pre
ssu
re (
Psig
)
Fig. 6. Fuzzy model verification (solid in red: estimated outputs; dotted in blue: real outputs). (For interpretation of the references to color in this figure legend, the readeris referred to the web version of the article.)
0.71
0.75
0.79
Ste
p S
ign
al
5% step increse of fuel flow valve
510
550
590
Pow
er
Outp
ut (M
W)
0 10 0 20 0 300
2500
2350
2200
Time (Second)
Thottle
Pre
ssure
(P
sig
)
0.7
0.66
0.74
5% step increse of turbine go vernor valve
530
540
550
0 100 20 0 30 0
2160
2200
2240
Time (Second)
Fflv
oob
ta
(
(
aesod[a
ig. 7. Open-loop step response test for the CCS of the 600 MW power plant (solid in red: estimated outputs; dashed in blue: real outputs; left column: step response of fuelow valve u1, right column: step response of turbine governor valve u8). (For interpretation of the references to color in this figure legend, the reader is referred to the webersion of the article.)
ffset between the model output and real output; however, it is acceptable for controller design and can be easily reduced by further tuningf the cluster centers and fuzzy membership functions. The effectiveness of the proposed identification strategy is clearly demonstratedy the results.
At last, we validate the model through open-loop step response tests: 5% step increase for each control valve. The results in Fig. 7 showhat the proposed fuzzy model has satisfactory approximation accuracy. The figure also shows the behavior of the CCS, which can be useds useful guide in the controller design:
1) Turbine governor valve can quickly change the power output; however, since the fuel entering into the unit does not change, the poweroutput will return to the previous level after a while, and what changed is only the stored thermal energy in the unit, as shown in“Throttle Pressure”.
2) Fuel flow valve can change the power output and throttle pressure ultimately; however, this influence has the characteristics of a largeinertia.
Comparing with the analytical modeling method, where certain process knowledge is required to derive the model, the proposedpproach is more convenient and practical to develop a satisfactory model for a real power plant, and the reasons are below: (a) themployment of Distributed Control Systems (DCS) is now the rule in power plants rather than the exception, thus all the process data areimply collected and archived; (b) once the experiment is approved, the power plant can be separated from the grid. Then with the help of
perators who well understand the dynamics of the plant, it is not difficult to design and run the experiment to obtain sufficient qualifiedata without putting the plant under too much stress; (c) the closed-loop subspace identification theory has been developing fast recently25], which can be directly used in our method instead of the regular SID algorithm. Therefore, even if the open-loop experiment is notllowed, it is still possible to develop the model through the closed-loop system data.
X. Wu et al. / Journal of Process Control 24 (2014) 1609–1626 1619
400
450
500
550
600
Po
we
r O
utp
ut (M
W)
0 100 200 300 400 500 600 700 8001800
200 0
220 0
240 0
2600
2800
Time (Second)
Th
rottle
Pre
ssu
re (
Psig
)
Fig. 8. Performance of the CCS for a 600–450–550 MW load variation: output variables (solid in red: SMPTC; dashed in blue: MPC; dotted in brown: PI; dot-dashed in green:reference). (For interpretation of the references to color in this figure legend, the reader is referred to the web version of the article.)
0.2
0.4
0.6
0.8
1
Fu
el F
low
Va
lve
0 100 200 300 400 500 60 0 700 800
0
0.2
0.4
0.6
0.8
1
Time (Second)
Tu
rbin
e G
ove
rno
r V
alv
e
Fo
5
tut
dabtfaa
o2
(
ig. 9. Performance of the CCS for a 600–450–550 MW load variation: manipulated variables (solid in red: SMPTC; dashed in blue: MPC; dotted in brown: PI). (For interpretationf the references to color in this figure legend, the reader is referred to the web version of the article.)
.2. Testing of the SMPTC
In this section, the proposed SMPTC is applied to the CCS of the 600 MW power plant and used as the primary controller to trackhe expected operating points of output power and throttle pressure. At the same time, a set of feedforward–feedback PI controllers aresed as sub-controllers to manipulate all other valves shown in Fig. 1 to maintain fuel–air-ratio, furnace pressure, Superheater/Reheateremperature, drum water level, and so on.
The sampling time of the SMPTC is set as 1 s, and we set: Ei = [0.01,0.1;0.01,0.002;0.5,0.08;0.01,0.02], Fi = [0]2×2, i = 1, . . ., 6, for theisturbance matrices. The tuning of them will influence the disturbance rejection property of the controller, and how to determine themre introduced well in [26,27]. For the parameters of the SMPTC, Nf is the number of free control inputs and tuning of it is a trade-offetween control performance and computational burden; Q0 and R0 are weighting matrices of outputs and control moves, respectively,hus tuning of them is a trade-off between output set-point tracking performance and input set-point tracking performance. The selectionor the state estimation error w will influence the feasibility of the SMPTC and the initial status of the control system. These parametersre set as: Nf = 10; Q0 = diag(120,10); R0 = 1000 × diag(1,1); w = [1,1,1,1]T in this simulation. The input constraints are u1,8,max = 1; u1,8,min = 0nd u1,max = 0.012; u1,min = −0.012; u8,max = 0.024; u8,min = −0.024 due to the physical limitations of the valves.
The first case is designed to show the overall performance of the controllers over a wide operation range. At t = 50 s, the set-pointsf power output and throttle pressure change from (600 MW, 2415.5 psig) to (450 MW, 2000 psig), then at t = 450 s change to (550 MW,257.4 psig).
Two other controllers are used for comparison:
1) Regular MPC [16] built on the proposed fuzzy model with the same Q0, R0 and sampling time, the prediction and control horizonparameters are set as: Np = Nc = 10 (MPC);

1620 X. Wu et al. / Journal of Process Control 24 (2014) 1609–1626
540
560
580
600
Pow
er
Outp
ut (M
W)
0 50 100 15 0 20 0 25 0
2250
2300
2350
2400
Time (Second)
Th
rott
le P
ressu
re (
Psig
)
Fig. 10. Performance of the CCS for a 600–550 MW load variation: output variables (solid in red: SMPTC; dashed in blue: SMPTC linear; dot-dashed in green: reference). (Forinterpretation of the references to color in this figure legend, the reader is referred to the web version of the article.)
0.6
0.7
0.8
0.9
Fuel F
low
Va
lve
0 50 10 0 150 20 0 25 0
0.7
0.8
0.9
Time (Second)
Tu
rbin
e G
ove
rno
r V
alv
e
Fig. 11. Performance of the CCS for a 600–550 MW load variation: manipulated variables (solid in red: SMPTC; dashed in blue: SMPTC linear). (For interpretation of thereferences to color in this figure legend, the reader is referred to the web version of the article.)
540
560
580
600
Po
wer
Outp
ut (M
W)
0 50 10 0 150 200 250
225 0
230 0
235 0
240 0
Time (Second)
Thro
ttle
Pre
ssure
(P
sig
)
Fig. 12. Performance of the CCS for a 600–550 MW load variation: output variables (solid in red: SMPTC; dashed in blue: SMPTC state; dot-dashed in green: reference). (Forinterpretation of the references to color in this figure legend, the reader is referred to the web version of the article.)

X. Wu et al. / Journal of Process Control 24 (2014) 1609–1626 1621
0.7
0.75
0.8
Fu
el F
low
Va
lve
0 50 10 0 150 200 2500.65
0.7
0.75
0.8
Time (Second)
Tu
rbin
e G
ove
rno
r V
alv
e
Fig. 13. Performance of the CCS for a 600–550 MW load variation: manipulated variables (solid in red: SMPTC; dashed in blue: SMPTC state). (For interpretation of thereferences to color in this figure legend, the reader is referred to the web version of the article.)
520
530
540
550
Pow
er
Ou
tpu
t (M
W)
50 100 150 200 250
215 0
220 0
225 0
Time (Second)
Thro
ttle
Pre
ssure
(P
sig
)
FS
(
ptbotipbibd
tC
5ca
ig. 14. Performance of the CCS at 550 MW operating point, an unknown input disturbance u1,d = −0.2occurs at t = 30 s: output variables (solid in red: SMPTC; dashed in blue:MPC; dot-dashed in green: reference). (For interpretation of the references to color in this figure legend, the reader is referred to the web version of the article.)
2) Feedforward–feedback PI controllers originally installed in the plant simulator (PI). The controller is designed based on the coordinatedboiler-following mode and the parameters are optimized and fixed under 600 MW operating condition.
The simulation results in Figs. 8 and 9 show that the proposed SMPTC has the best performance, which can quickly track the power andressure set-points in a wide range. Based on the same fuzzy model, the MPC also has a good performance; however, it cannot guaranteehe stability of the closed-loop system, thus for the given short predictive horizon, the result shows a little oscillation during the transitionetween 600 MW and 450 MW. For the PI controller under the boiler-following mode, the governor valve is used to regulate the powerutput and the fuel flow valve is used to regulate the throttle pressure. Although the feedforward action accelerates the response ofhe controller and the parameters are well tuned at a given loading condition, the PI controller has drawbacks: (a) the separate single-nput, single-output (SISO) loops do not account for the interactions of the different thermal properties in the plant; (b) the controllerarameters are fixed, thus are no longer suited when wide range load following operation is required and the nonlinearity of the plantecome significant; and (c) the controller cannot handle the constraints of manipulated variables in the controller calculation stage. Thus
ts performance is decreased when physical limitations of the valves in plants are involved, which may also cause the integral windup (cane viewed around t = 500 s: the power output has already exceeded the set-point, but the governor valve keeps fully open). Therefore, it isifficult to achieve a satisfactory control for both power and pressure, and the performance is degraded over a wide operation range.
Note that the QP based SSTC and LMI based stable MPC are both computationally efficient. For the proposed SMPTC, the SSTC calculationakes 0.0771 s and the controller calculation takes 0.5188 s for each step during the simulation. (MATLAB R2006a is used on our PC: 2.00 GHzore-i7 CPU, 8 G Memory)
To further test the effectiveness of the fuzzy model based controller, a same SMPTC based on a single linear model identified around the
70–580 MW operating region (SMPTC linear) is compared with the proposed controller. The simulation is made considering a set-pointshange from (600 MW, 2415.5 psig) to (550 MW, 2257.4 psig) and the results are shown in Figs. 10 and 11. The proposed fuzzy SMPTC canchieve a better control performance.
1622 X. Wu et al. / Journal of Process Control 24 (2014) 1609–1626
0.7
0.8
0.9
1
Fu
el F
low
Va
lve
50 100 150 200 2500.66
0.68
0.7
0.72
0.74
Time (Second)
Tu
rbin
e G
ove
rno
r V
alv
e
Fi
A0sFso
op
eo
6
piStoua
A
DCw
A
A
plfif
ig. 15. Performance of the CCS at 550 MW operating point, an unknown input disturbance u1,d = −0.2 occurs at t = 30 s: manipulated variables (solid in red: SMPTC; dashedn blue: SMPC). (For interpretation of the references to color in this figure legend, the reader is referred to the web version of the article.)
Then we compare the proposed controller with conventional SMPTC using the state-variable based objective function (23) (SMPTC state). linearly decreasing load is considered such that at t = 40 s, the power set-point decreases from 600 MW to 550 MW in the rate of.333 MW/s and the pressure set-point decreases from 2415.5 psig to 2257.4 psig in the rate of 1.054 psig/s. For the SMPTC state, weet Q0 = 0.01 × diag(1,1,3,1); R0 = diag(1,1), other parameters are set the same as for the SMPTC and the simulation results are shown inigs. 12 and 13. Due to the reason we discussed in Section 4, it is difficult to find the weighting matrices for the SMPTC state to attain aatisfactory tracking of the set-points. Moreover, since the dimension of the state vector is n = 4 in our case, which is twice as much as theutput dimension, the computational burden of SMPC state is also much heavier.
At last, we test the proposed controller under significant unknown disturbances. We assume that the plant is working at 550 MWperation point, and at t = 30 s an unknown input disturbance u1,d = −0.2 is acted on the fuel flow due to the wear and tear of the valve. Theroposed controller is compared with the same controller without using the disturbance model and SSTC (SMPC) as shown in Figs. 14 and 15.
The result shows that the proposed SMPTC handles the unknown plant disturbances effectively and keeps the plant operating in anxpected condition. However, for the SMPC, since the state and input set-points are fixed at certain load level, significant control offsetccurs in the case of unknown plant disturbances.
. Conclusion
The cooperation of fuzzy model and predictive control provides an effective way to overcome the control problem of the large-scaleower plant. A TS-fuzzy model is first developed based on the fuzzy clustering and subspace identification method. The resulting model
s shown to represent the CCS dynamics very closely and is well suited for controller design due to its state-space structure, and thus, anMPTC is proposed on this fuzzy model. An output-based objective function is used in the controller formulation to make it applicable forhe data-driven model. With the help of the state and disturbance observer and SSTC, the proposed controller can achieve a tracking controlf the CCS while satisfying the input constraints and guaranteeing the input-to-state stability of the system even in the case of significantnknown disturbances or plant parameter variations. The advantages and effectiveness of the proposed modeling and controller designre demonstrated through the simulations of a large-scale 600 MW power plant.
cknowledgements
The authors acknowledge the National Natural Science Foundation of China (NSFC) under Grant 51476027 and Grant 51036002, theoctoral Fund of the Ministry of Education of China under Grant 20130092110061, the Natural Science Foundation of Jiangsu Province,hina under Grant BK20141119, the Foundation of State Key Laboratory of Coal Combustion under Grant FSKLCC1203 for funding thisork.
ppendix A.
.1. Proof of Theorem 1
Part 1: Minimizing the upper bound of infinite-horizon objective function
To guarantee the stability of the closed-loop system on the infinite-time horizon, state-feedback control law has to be used. This also
rovides a way to convert the problem of calculating infinite number of control inputs (actually infeasible) into that of finding a controlaw (feasible). However, the format of the feedback law greatly limits the optimality of the MPC, which is first shown in [29], thus the firstnite number of control inputs (which are obviously more important than the future ones) are separated from the rest of the inputs in
eedback form and set as the free control variables as in the regular MPC.

i
w
s
f
w
i
X. Wu et al. / Journal of Process Control 24 (2014) 1609–1626 1623
This division improves the optimality of SMPC at the expense of computational burden. In this paper, the first Nf number of controlnputs are set aside as free. Corresponding to this division, the infinite-horizon objective function (24) is also divided into two parts [29,30]:
J∞0 (k) = JNf −10 (k) + J∞Nf
(k) (A1)
here
JNf −10 (k) =
Nf −1∑N=0
[yT (k + N|k)Q0y(k + N|k) + uT (k + N|k)R0u(k + N|k)] = (Lx(k)x(k) + Lu(k)U(k))TQ (Lx(k)x(k) + Lu(k)U(k)) + U(k)T RU(k)
J∞Nf(k) =
∞∑N=Nf
[yT (k + N|k)Q0y(k + N|k) + uT (k + N|k)R0u(k + N|k)]
Suppose a common Lyapunov function (CLF) [28,29],
V(x) = xT S−1x (A2)
atisfies:
V(k) = x(k + 1)T S−1x(k + 1) − x(k)T S−1x(k) < 0 (A3)
or all time, the system is guaranteed to be stable in the sense of Lyapunov.To find the upper bound of the infinite-horizon objective function (24), suppose the CLF satisfies:
V(k + N + 1|k) − V(k + N|k) < −[y(k + N|k)T Q0y(k + N|k) + u(k + N|k)T R0u(k + N|k)] (A4)
Summing (A4) for N = Nf to N = ∞, and with x(∞|k) = 0 and V(∞|k) = 0, we get:
J∞Nf(k) < V(k + Nf |k) = x(k + Nf |k)T S−1x(k + Nf |k) = (lx(k)x(k) + lu(k)U(k))
TS−1(lx(k)x(k) + lu(k)U(k)) (A5)
Thus we can get the upper bound of J∞0 (k):
J∞0 (k) = JNf −10 (k) + J∞Nf
(k) < (Lx(k)x(k) + Lu(k)U(k))TQ (Lx(k)x(k) + Lu(k)U(k)) + U(k)T RU(k) + (lx(k)x(k) + lu(k)U(k))
TS−1(lx(k)x(k)
+ lu(k)U(k)) (A6)
However, in (A6), x(k) = x(k) − xs(k) is unmeasured, thus we express it as:
x(k) = x(k) + x(k) − xs(k) = xs(k) + x(k) (A7)
here x(k) is the estimation error between x(k) and x(k), and xs(k) = x(k) − xs(k) is the estimated shifted state-variables.Then we have, the first term on the right hand of (A6):
= (Lx(k)xs(k) + Lu(k)U(k) + Lx(k)x(k))TQ (Lx(k)xs(k) + Lu(k)U(k) + Lx(k)x(k)) ≤ 2(Lx(k)xs(k) + Lu(k)U(k))
TQ (Lx(k)xs(k) + Lu(k)U(k))
+ 2(Lx(k)x(k))T Q (Lx(k)x(k))
Consider that the estimation error is bounded with the help of the observer: |x(k)| ≤ w.
2(Lx(k)x(k))T Q (Lx(k)x(k)) ≤ 2(Lx(k)w)T Q (Lx(k)w) = c
n which c is a constant. Thus we further have:The first term on the right hand of (A6)≤
2(Lx(k)xs(k) + Lu(k)U(k))TQ (Lx(k)xs(k) + Lu(k)U(k)) + c (A8)
Similarly, the third term on the right hand of (A6)
= (lx(k)xs(k) + lu(k)U(k) + lx(k)x(k))TS−1(lx(k)xs(k) + lu(k)U(k) + lx(k)x(k)) ≤ 2(lx(k)xs(k) + lu(k)U(k))
TS−1(lx(k)xs(k) + lu(k)U(k))
+ 2(lx(k)w)T S−1(lx(k)w) (A9)
Substituting (A8) and (A9) into (A6), we can get:
J∞0 (k) ≤ c + U(k)T RU(k) + 2(lx(k)w)T S−1(lx(k)w) + 2(Lx(k)xs(k) + Lu(k)U(k))TQ (Lx(k)xs(k) + Lu(k)U(k))
+ 2(lx(k)xs(k) + lu(k)U(k))TS−1(lx(k)xs(k) + lu(k)U(k)) (A10)
Define a scalar and suppose:
U(k)T RU(k) + 2(lx(k)w)T S−1(lx(k)w) + 2(Lx(k)xs(k) + Lu(k)U(k))TQ (Lx(k)xs(k) + Lu(k)U(k))
+ 2(lx(k)xs(k) + lu(k)U(k))TS−1(lx(k)xs(k) + lu(k)U(k)) ≤ (A11)

1
t
t
w
gagc
Rf(et
A
624 X. Wu et al. / Journal of Process Control 24 (2014) 1609–1626
Then minimizing the upper bound of J∞0 (k) is equivalent to the minimization of , subject to (A11).By defining S−1 = −1S−1, and using the Schur complements [28], (A11) can be expressed as (27) in the form of LMI.
Part 2: stability constraint
Using the state feedback control law:
u(k + N) = YωG−1x(k + N|k), N≥Nf (A12)
he nominal predictive closed-loop fuzzy system (22) can be described as:
x(k + N + 1|k) = (Aω + BωYωG−1)x(k + N|k) (A13)
y(k + N|k) = (Cω + DωYωG−1)x(k + N|k) (A14)
Substituting (A12)–(A14) into (A4) and noting the fact that:
(G − S)TS−1(G − S) > 0 ⇒ GT S−1G≥GT + G − S (A15)
hen the stability constraint (A4) is satisfied if the following holds:
GT + G − S − (AiG + BiYi)T S−1(AiG + BiYi) − (CiG + DiYi)
T Q0−1(CiG + DiYi) − YTi R0−1Yi > 0, i = 1, 2, . . ., L (A16)
hich can be expressed by the LMIs (28).
Part 3: input constraint
Since the control sequence is divided into free control inputs and controls in state feedback law, appropriate input constraints have to beiven. Because the free control inputs are the same as in the regular MPC, constraints (28) and (29) can be directly used for the magnitudend rate constraints. However, for the state feedback law, it is difficult to give the magnitude and rate constraints simultaneously whileuaranteeing the stability. Therefore, since we have already constrained the first Nf control inputs, we ignore the constraints for the futureontrols in state feedback form so that the stability will be maintained.
emark A.1. The use of the CLF results in some conservatism in the stability design, because it requires to find a common Lyapunov matrixor all local models. This conservatism can be relaxed by adopting advanced Lyapunov functions, such as piecewise Lyapunov functionPLF) [30], fuzzy Lyapunov function (FLF) or extended-FLF [14] at the expense of increasing the number of LMIs. Modified controllers areasily derived following the same procedure. Considering both the control performance and computation requirement, the CLF is choseno design the SMPTC for the CCS in this paper.
ppendix B. TS fuzzy model for the CCS of 600 MW power plant
R1 : IF ϕk ∈ M1 (Vϕ1 = (538.2186, 2205.4587, 0.7303, 0.7173), �1 = 8.2369),
THEN :⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
xk+1 =
⎡⎢⎢⎣
0.9945 −0.0233 0.0202 −0.0172
0.0038 0.8179 0.1737 0.1178
−0.0013 .0872 0.9043 0.0244
0.0031 −0.0334 0.0172 0.9554
⎤⎥⎥⎦ xk +
⎡⎢⎢⎣
−3.5389 5.7488
4.0675 31.9474
−3.9890 −15.9638
7.6927 0.9500
⎤⎥⎥⎦uk
yk =[
−1.0393 1.4309 −0.2366 −0.6886
−6.3265 −102273 0.9308 −0.3063
]xk +
[−2.6987 8.8412
−1.9223 −7.0063
]uk;
R2 : IF ϕk ∈ M2(Vϕ2 = (527.9369, 2390.7844, 0.6166, 0.5194), �2 = 15.2262),
THEN :⎧⎪⎪⎪⎪⎪⎪⎨ xk+1 =
⎡⎢⎢⎣
0.9945 −0.0233 0.0202 −0.0172
0.0038 0.8179 0.1737 0.1178
−0.0013 .0872 0.9043 0.0244
⎤⎥⎥⎦ xk +
⎡⎢⎢⎣
−3.1464 5.2100
1.3818 34.7329
0.4601 −20.3296
⎤⎥⎥⎦uk
⎪⎪⎪⎪⎪⎪⎩0.0031 −0.0334 0.0172 0.9554 5.0709 3.4278
yk =[
−1.0393 1.4309 −0.2366 −0.6886
−6.3265 −102273 0.9308 −0.3063
]xk +
[−6.6482 12.8909
−8.9934 −1.4153
]uk;

R
[[
[
[
[
[
X. Wu et al. / Journal of Process Control 24 (2014) 1609–1626 1625
R3 : IF ϕk ∈ M3 (Vϕ3 = (491.5588, 2174.0543, 0.6152, 0.5516), �3 = 14.0611),
THEN :⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
xk+1 =
⎡⎢⎢⎣
0.9945 −0.0233 0.0202 −0.0172
0.0038 0.8179 0.1737 0.1178
−0.0013 .0872 0.9043 0.0244
0.0031 −0.0334 0.0172 0.9554
⎤⎥⎥⎦ xk +
⎡⎢⎢⎣
−3.3749 5.6302
2.1319 33.7359
−9.6061 −9.5058
12.0482 −4.0718
⎤⎥⎥⎦uk
yk =[
−1.0393 1.4309 −0.2366 −0.6886
−6.3265 −102273 0.9308 −0.3063
]xk +
[−3.5892 8.6422
−8.6666 −2.5654
]uk;
R4 : IF ϕk ∈ M4 (Vϕ4 = (519.5093, 2108.4673, 0.7474, 0.7047), �4 = 17.8237),
THEN :⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
xk+1 =
⎡⎢⎢⎣
0.9945 −0.0233 0.0202 −0.0172
0.0038 0.8179 0.1737 0.1178
−0.0013 .0872 0.9043 0.0244
0.0031 −0.0334 0.0172 0.9554
⎤⎥⎥⎦ xk +
⎡⎢⎢⎣
−2.7790 4.8989
4.3101 31.5112
−4.5815 −14.5272
7.3704 0.4806
⎤⎥⎥⎦uk
yk =[
−1.0393 1.4309 −0.2366 −0.6886
−6.3265 −102273 0.9308 −0.3063
]xk +
[−3.0935 6.9652
−12.9523 4.4722
]uk;
R5 : IF ϕk ∈ M5(Vϕ5 = (568.6231, 2345.4637, 0.7716, 0.7168), �5 = 15.2262),
THEN :⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
xk+1 =
⎡⎢⎢⎣
0.9945 −0.0233 0.0202 −0.0172
0.0038 0.8179 0.1737 0.1178
−0.0013 .0872 0.9043 0.0244
0.0031 −0.0334 0.0172 0.9554
⎤⎥⎥⎦ xk +
⎡⎢⎢⎣
−3.3550 5.4969
2.5740 33.4784
−2.8989 −16.9505
6.8917 1.4960
⎤⎥⎥⎦uk
yk =[
−1.0393 1.4309 −0.2366 −0.6886
−6.3265 −102273 0.9308 −0.3063
]xk +
[−6.0665 12.3414
−9.7702 0.1015
]uk;
R6 : IF ϕk ∈ M6 (Vϕ6 = (536.1901, 2238.3435, 0.7023, 0.6639), �6 = 8.2369),
THEN :⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
xk+1 =
⎡⎢⎢⎣
0.9945 −0.0233 0.0202 −0.0172
0.0038 0.8179 0.1737 0.1178
−0.0013 .0872 0.9043 0.0244
0.0031 −0.0334 0.0172 0.9554
⎤⎥⎥⎦ xk +
⎡⎢⎢⎣
−3.1915 5.4035
2.7761 33.0922
−5.3061 −14.3542
9.2393 −0.8768
⎤⎥⎥⎦uk
yk =[
−1.0393 1.4309 −0.2366 −0.6886
−6.3265 −102273 0.9308 −0.3063
]xk +
[−3.2361 9.2342
−7.3239 −2.5430
]uk
eferences
[1] S. Li, H. Liu, W.J. Cai, Y.C. Soh, L.H. Xie, A new coordinated control strategy for boiler–turbine system of coal-fired power plant, IEEE Trans. Control Syst. Technol. 13(November) (2005) 943–954.
[2] R. Garduno-Ramirez, K.Y. Lee, Wide-range operation of a power unit via feedforward fuzzy control, IEEE Trans. Energy Convers. 15 (December (4)) (2000) 421–426.[3] J.S. Heo, K.Y. Lee, R. Garduno-Ramirez, Multiobjective control of power plant using particle swarm optimization techniques, IEEE Trans. Energy Convers. 21 (June (2))
(2006) 552–561.[4] S. Zhang, C.W. Taft, J. Bentsman, A. Hussey, B. Petrus, Simultaneous gains tuning in boiler/turbine PID-based controller clusters using iterative feedback tuning method-
ology, ISA Trans. 51 (September) (2012) 609–621.[5] W. Tan, H.J. Marquez, T. Chen, J. Liu, Analysis and control of a nonlinear boiler–turbine unit, J. Process Control 15 (December) (2005) 883–891.[6] P. Chen, J. Shamma, Gain-scheduled l1-optimal control for boiler–turbine dynamics with actuator saturation, J. Process Control 3 (April) (2004) 263–277.[7] K. Zheng, J. Bentsman, C.W. Taft, Full operating range robust hybrid control of a coal-fired boiler/turbine unit, J. Dyn. Syst. Meas. Control 130 (July) (2008) 041011-
1–041011-14.[8] J. Wu, S.K. Nguang, J. Shen, G. Liu, Y. Li, Robust H∞ tracking control of boiler–turbine systems, ISA Trans. 49 (July) (2010) 369–375.[9] U. Moon, K.Y. Lee, A boiler–turbine system control using a fuzzy auto-regressive moving average (FARMA) model, IEEE Trans. Energy Convers. 18 (March (1)) (2003)
142–148.10] R. Dimeo, K.Y. Lee, Boiler–turbine control system design using a genetic algorithm, IEEE Trans. Energy Convers. 10 (December) (1995) 752–759.11] U. Moon, K.Y. Lee, Step-response model development for dynamic matrix control of a drum-type boiler–turbine system, IEEE Trans. Energy Convers. 24 (June) (2009)
423–430.12] K.Y. Lee, J.H. Van Sickel, J.A. Hoffman, W.-H. Jung, S.-H. Kim, Controller design for a large-scale ultrasupercritical once-through boiler power plant, IEEE Trans. Energy
Convers. 25 (December (4)) (2010) 1063–1070.13] X. Liu, P. Guan, C.W. Chan, Nonlinear multivariable power plant coordinate control by constrained predictive scheme, IEEE Trans. Control Syst. Technol. 18 (September
(5)) (2010) 1116–1125.14] X. Wu, J. Shen, Y. Li, K.Y. Lee, Stable model predictive control based on TS fuzzy model with application to boiler–turbine coordinated system, in: Proc. 50th IEEE
Conference on Decision and Control, December, 2011, pp. 3356–3361.15] Y. Li, J. Shen, K.Y. Lee, X. Liu, Offset-free fuzzy model predictive control of a boiler–turbine system based on genetic algorithm, Simul. Modell. Pract. Theory 26 (August)
(2012) 77–95.

1
[
[
[[[[[
[[[[[[[[
[
[
[
[
626 X. Wu et al. / Journal of Process Control 24 (2014) 1609–1626
16] K. Wu, T. Zhang, J. Lv, W. Xiang, Model predictive control for nonlinear boiler–turbine system based on fuzzy gain scheduling, in: Proc. 2008 IEEE International Conferenceon Automation and Logistics, September, 2008, pp. 1115–1120.
17] J. Wu, J. Shen, M. Krug, S.K. Nguang, Y. Li, GA-based nonlinear predictive switching control for a boiler–turbine system, J. Control Theory Appl. 10 (July (1)) (2012)100–106.
18] X.J. Liu, X.B. Kong, Nonlinear fuzzy model predictive iterative learning control for drum-type boiler–turbine system, J. Process Control 23 (8) (2013) 1023–1040.19] X.J. Liu, C.W. Chan, Neuro-fuzzy generalized predictive control of boiler steam temperature, IEEE Trans. Energy Convers. 21 (4) (2006) 900–908.20] X. Wu, J. Shen, Y. Li, K.Y. Lee, Data-driven modeling and control for boiler–turbine unit, IEEE Trans. Energy Convers. 28 (3) (Sep. 2013) 470–481.21] T. Takagi, M. Sugeno, Fuzzy identification of systems and its application to modeling and control, IEEE Trans. Syst. Man Cybern. 15 (January–February) (1985) 116–132.22] R. Babuska, P.J. van de Veen, U. Kaymak, Improved covariance estimation for Gustafson–Kessel clustering, in: Proc. 2002 IEEE International Conference on Fuzzy System,
May, 2002, pp. 1081–1085.23] P.V. Overschee, B.D. Moor, A unifying theorem for three subspace system identification algorithms, Automotica 31 (December (12)) (1995) 1853–1861.24] W. Favoreel, B.D. Moor, P.V. Overschee, Subspace state space system identification for industrial processes, J. Process Control 10 (April) (2000) 149–155.25] S.J. Qin, An overview of subspace identification, Comput. Chem. Eng. 30 (September) (2006) 1502–1513.26] G. Pannocchia, J.B. Rawlings, Disturbance models for offset-free model-predictive control, AICHE J. 49 (February (2)) (2003) 426–437.27] K.R. Muske, T.A. Badgwell, Disturbance modeling for offset-free linear model predictive control, J. Process Control 12 (August (5)) (2002) 617–632.28] M.V. Kothare, V. Balakrishnan, M. Morari, Robust constrained model predictive control using linear matrix inequalities, Automatica 32 (October (10)) (1996) 1361–1379.29] Y. Lu, Y. Arkun, Quasi-min-max MPC algorithms for LPV systems, Automatica 36 (April) (2000) 527–540.30] T. Zhang, G. Feng, X. Zeng, Output tracking of constrained nonlinear processes with offset-free input-to-state stable fuzzy predictive control, Automatica 45 (April) (2010)
900–909.31] B. Anderson, T. Brinsmead, F. Bruyne, J. Hespanha, D. Liberzon, A. Morse, Multi model adaptive control. Part 1: finite controller coverings, Int. J. Robust Nonlinear Control
10 (2000) 909–929.
32] J.W. van Wingerden, M. Verhaegen, Subspace identification of multivariable LPV systems: the PBSID approach, in: Proc. 47th IEEE Conference on Decision and Control,December, 2008, pp. 4516–4521.33] F. Felici, J.W. van Wingerden, M. Verhaegen, Subspace identification of MIMO LPV systems using a periodic scheduling sequence, Automotica 43 (December (10)) (2007)
1684–1697.34] G. Feng, A survey on analysis and design of model-based fuzzy control systems, IEEE Trans. Fuzzy Syst. 14 (October (5)) (2006) 676–697.