Embed Size (px)
Citation preview
Kalkulus VariasiPendahuluan, Model Matematika, Keterkontrolan
Toni Bakhtiar
Departemen Matematika IPB
Februari 2017
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 1 / 42
Outline
Beberapa contoh masalah kontrol optimum
Rumusan masalah kontrol optimum1 Model matematika2 Persamaan state3 Fungsi kendala
Reachability, controllability, observability
Sistem kendali
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 2 / 42
Masalah Inventori-Produksi
Sumber: Sethi & Thompson (2006)Fungsional objektif:
minP
∫ T
0
[h(I − I )2
2+c(P − P)2
2
]e−rt dt.
Fungsi kendala:
I (t) = P(t)−D(t),I (0) = I0,
dengan I tingkat inventori, P tingkat produksi, D tingkat permintaan, Itingkat inventori yang ingin dicapai, P tingkat produksi yang ingin dicapai,dan e−rt faktor diskon.Masalah: menentukan tingkat produksi P = P(t) sedemikian sehinggameminimumkan biaya-biaya penalti akibat tidak terpenuhinya target dalaminventori dan produksi.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 3 / 42
Masalah Pemasaran melalui Iklan
Sumber: Sethi & Thompson (2006)Fungsional objektif:
maxc
∫ ∞
0(π(G )− c(t))e−rt dt.
Fungsi kendala:
G (t) = c(t)− δG (t),
G (0) = G0,
dengan π tingkat penerimaan (revenue) yang merupakan fungsi dari citraperusahaan (goodwill) G , c biaya produksi (iklan), dan δ laju depresiasi.Masalah: menentukan besarnya biaya yang dikeluarkan untuk iklanc = c(t) sedemikian sehingga memaksimumkan tingkat keuntungan.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 4 / 42
Masalah Pemeliharaan dan Pemanenan Ikan
Sumber: Sydsæter et al. (2008)Fungsional objektif:
maxu
(x(T )P(T , x(T ))e−rT −
∫ T
0cx(t)u(t)e−rt dt
).
Fungsi kendala:
x(t) = x(t)g(t, u(t)),
x(0) = x0,
dengan x(t) berat ikan pada saat t, P(t, x) harga ikan dengan berat xpada saat t, u(t) banyaknya pakan ikan yang digunakan, dan c > 0 biayapakan ikan.Masalah: menentukan banyaknya pakan ikan yang digunakan u = u(t)sedemikian sehingga memaksimumkan keuntungan.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 5 / 42
Masalah Energi dan Kualitas Lingkungan
Sumber: Chiang (1992)Fungsional objektif:
maxE
∫ T
0U(C (E ),P(E )) dt.
Fungsi kendala:
S(t) = −E (t),S(0) = S0, S(T ) ≥ 0,
dengan U fungsi utilitas yang bergantung pada konsumsi energi C (E ) danpolusi P(E ), E laju penggunaan energi (BBM), dan S persediaan energi(BBM).Masalah: menentukan laju penggunaan energi (BBM) E = E (t)sedemikian sehingga memaksimumkan utilitas.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 6 / 42
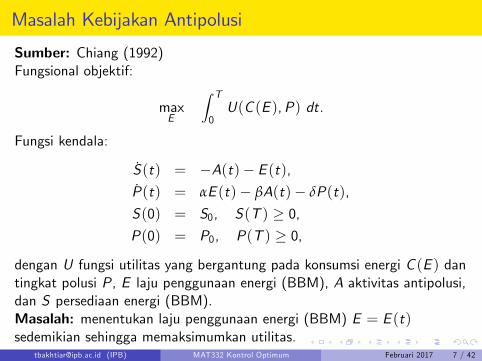
Masalah Kebijakan Antipolusi
Sumber: Chiang (1992)Fungsional objektif:
maxE
∫ T
0U(C (E ),P) dt.
Fungsi kendala:
S(t) = −A(t)− E (t),P(t) = αE (t)− βA(t)− δP(t),
S(0) = S0, S(T ) ≥ 0,P(0) = P0, P(T ) ≥ 0,
dengan U fungsi utilitas yang bergantung pada konsumsi energi C (E ) dantingkat polusi P, E laju penggunaan energi (BBM), A aktivitas antipolusi,dan S persediaan energi (BBM).Masalah: menentukan laju penggunaan energi (BBM) E = E (t)sedemikian sehingga memaksimumkan utilitas.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 7 / 42
Perumusan Masalah Kontrol Optimum
Masalah kontrol optimum adalah masalah menentukan peubahkontrol yang dapat mengendalikan suatu proses sedemikian sehinggamemenuhi beberapa kendala fisik dan dalam waktu yang samamengoptimumkan kriteria tertentu.
Masalah kontrol optimum dapat diselesaikan melalui dua pendekatan:1 program dinamik (Bellman, 1957)2 prinsip maksimum (Pontryagin, 1962)
Dalam kuliah ini akan dibahas penyelesaian masalah kontrol optimummelalui pendekatan prinsip maksimum.
Pendekatan prinsip maksimum banyak menggunakan teknik dalamkalkulus variasi.
Dalam kuliah ini, kalkulus variasi merupakan bahan UTS dan kontroloptimum, sebagai penerapan kalkulus variasi, merupakan bahan UAS.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 8 / 42
Model Matematika
Perumusan masalah kontrol optimum membutuhkan:
Model matematika dari proses yang akan dikendalikan.Fungsi kendala.Spesifikasi dari kriteria yang akan dioptimumkan (fungsional objektif).
Model matematika dari suatu proses umumnya dinyatakan dalam bentukpersamaan state (berupa persamaan diferensial):
x(t) = g(x(t), u(t), t),
dengan
x(t) =
x1(t)x2(t)...
xn(t)
, u(t) =u1(t)u2(t)...
um(t)
, g(x , u, t) =g1(x , u, t)g2(x , u, t)
...gn(x , u, t)
.x(t) disebut sebagai vektor peubah state dan u(t) disebut sebagaivektor peubah kontrol
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 9 / 42
Model Matematika
Klasifikasi model:
nonlinear dan time-varying (non-autonomous atau takmandiri):
x(t) = g(x(t), u(t), t).
nonlinear dan time-invariant (autonomous atau mandiri):
x(t) = g(x(t), u(t)).
linear dan time-varying :
x(t) = A(t)x(t) + B(t)u(t).
linear dan time-invariant:
x(t) = Ax(t) + Bu(t).
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 10 / 42
Model Matematika
Analisis model taklinear x = g(x , u) biasanya dilakukan melalui modellinear padanannya (linearized model) yang berbentuk x = Ax + Bu,dengan A merupakan matriks Jacobi yang dievaluasi di sekitar titiktetapnya:
A =
∂g1∂x1
· · · ∂g1∂xn
.... . .
...∂gn∂x1
· · · ∂gn∂xn
x=x
.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 11 / 42
Model Matematika
ExampleSebuah mobil berjalan lurus meninggalkan titik asal. Jarak mobil dari titikasal pada saat t dinyatakan sebagai s(t). Mobil diasumsikan dapatdikendalikan melalui percepatan (menginjak pedal gas) atau perlambatan(menginjak pedal rem) yang dinyatakan sebagai
s(t) = a(t) + b(t),
dengan peubah kontrol a merupakan percepatan dan b perlambatan.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 12 / 42
Persamaan State
Example (Lanjutan)Dapat didefiniskan vektor peubah state dan vektor peubah kontrol:
x(t) =(x1(t)x2(t)
)=
(s(t)s(t)
), u(t) =
(u1(t)u2(t)
)=
(a(t)b(t)
).
Diperoleh x1 = x2 dan x2 = u1 + u2, sehingga dalam notasi matriksdiperoleh model matematika
x(t) =(0 10 0
)x(t) +
(0 01 1
)u(t).
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 13 / 42
Fungsi Kendala
Example (Lanjutan)Jika mobil mulai berjalan dari titik asal pada saat t0 dan berhenti di titik epada saat tf , maka diperoleh kendala
x1(t0) = 0, x1(tf ) = e,
x2(t0) = 0, x2(tf ) = 0.
Dalam notasi matriks,
x(t0) =(00
), x(tf ) =
(e0
).
Jika ada syarat tambahan bahwa mobil tidak boleh mundur, berputar, atauberbelok maka harus ada kendala tambahan
0 ≤ x1(t) ≤ e, 0 ≤ x2.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 14 / 42
Fungsi Kendala
Example (Lanjutan)Maksimum percepatan ialah M1 dan maksimum perlambatan ialah M2
(admissible control):
0 ≤ u1(t) ≤ M1,
−M2 ≤ u2(t) ≤ 0.
Banyaknya BBM mula-mula G liter dan diasumsikan tidak ada pengisianBBM di tengah jalan yang dilewati:∫ tf
t0[k1u1(t) + k2x2(t)] dt ≤ G .
Diinginkan mobil tiba di titik e secepat mungkin:
min J = tf − t0 =∫ tf
t0dt.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 15 / 42
Example (Ringkasan)
Masalah kontrol optimum (multivariabel, state terbatas, input terbatas,kendala integral):
min J :=∫ tf
t0dt
dengan kendala:
x1 = x2,
x2 = u1 + u2,
x1(t0) = 0, x1(tf ) = e,
x2(t0) = 0, x2(tf ) = 0,
0 ≤ x1(t) ≤ e, 0 ≤ x2,0 ≤ u1(t) ≤ M1, −M2 ≤ u2(t) ≤ 0,∫ tf
t0[k1u1(t) + k2x2(t)] dt ≤ G .
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 16 / 42
Masalah Kontrol Optimum
Untuk selanjutnya, kriteria (fungsional objektif) diasumsikan berbentuk
J = S(x(tf ), tf ) +∫ tf
t0f (x(t), u(t), t)dt.
Fungsi S disebut sebagai scrap value atau salvage value.Masalah kontrol optimum adalah masalah menentukan admissible controlu∗(t) yang dapat mengendalikan sistem dinamik
x(t) = g(x(t), u(t), t),
sedemikian sehingga mampu mengikuti admissible trajectory x∗(t) dalaminterval waktu [t0, tf ] dan mengoptimumkan fungsional objektif
J = S(x(tf ), tf ) +∫ tf
t0f (x(t), u(t), t)dt.
u∗(t) disebut kontrol optimum dan x∗(t) trajektori [email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 17 / 42
Reachability
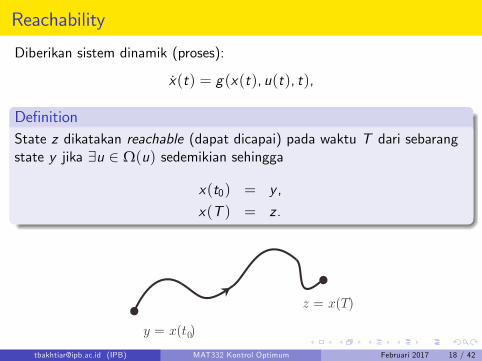
Diberikan sistem dinamik (proses):
x(t) = g(x(t), u(t), t),
DefinitionState z dikatakan reachable (dapat dicapai) pada waktu T dari sebarangstate y jika ∃u ∈ Ω(u) sedemikian sehingga
x(t0) = y ,
x(T ) = z .
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 18 / 42
Controllability
Diberikan sistem dinamik (proses):
x(t) = g(x(t), u(t), t),
DefinitionSistem dinamik dikatakan controllable (terkontrol) jika sebarang state zreachable (dapat dicapai) dari sebarang state y .
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 19 / 42
Observability
Diberikan sistem dinamik (proses):
x(t) = g(x(t), u(t), t), x(t0) = x0,
w(t) = h(x(t)) → observasi (pengamatan, pengukuran)
DefinitionSistem dinamik dikatakan observable (dapat diobservasi) jika berdasarkanu, w , dan [t0, tf ], kondisi awal x0 dapat ditentukan.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 20 / 42
Controllability
ExampleAdakah u sehingga sistem berikut terkontrol?
x = x + u, x(t0) = x0, x(T ) = xT .
Jawab: Sistem di atas dikatakan terkontrol jika dapat ditemukan fungsikendali u(t) sedemikian sehingga membawa sistem dari titik (t0, x0)menuju titik (T , xT ) dengan x0, xT , t0 6= T sebarang. Akan dicari u dalambentuk paling sederhana, yaitu u(t) = k (konstan). Diperoleh
x = x + k ⇔ dxx + k
= dt
⇔∫ dxx + k
=∫dt
⇔ x(t) = Cet − k.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 21 / 42
Example (Lanjutan)Dari nilai awal dan nilai akhir diperoleh sistem persamaan:
x(t0) = x0 ⇔ Cet − k = x0,x(T ) = xT ⇔ CeT − k = xT ,
sehingga diperoleh solusi:
C =x0 − xTet0 − eT ,
k =x0 − xTet0 − eT e
t0 − x0 =: u(t).
∴ Sistem terkontrol.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 22 / 42
Controllability
Example
Tentukan kendali konstan u(t) = k sehingga sistem berikut terkontrol:
x = x + 2x + u,
x(0) = 0,
x(1) = 1,
x(0) = 0.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 23 / 42
SolutionDengan mensubstitusikan u(t) = k diperoleh PD orde duax − x − 2x = k. Penyelesaian dari persamaan karakteristik r2 − r − 2 = 0ialah r = 2 dan r = −1, sehingga diperoleh solusi homogenxh(t) = C1e2t + C2e−t . Jika xp merupakan solusi partikular maka−2xp = k atau xp(t) = − 12k, sehingga solusi umum PD ialah
x(t) = C1e2t + C2e−t − 12k.
Syarat batas x(0) = 0 dan x(0) = 0 memberikan
C1 + C2 − 12k = 0, 2C1 − C2 = 0,
sehingga didapatkan 3C1 = 12k atau C1 =
16k dan C2 =
13k. Solusi umum
PD menjadi x(t) = 16ke
2t + 13ke−t − 1
2k. Dari syarat batas x(1) = 1diperoleh
k =1
16e2 + 1
3e−1 − 1
2
=: u(t).
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 24 / 42
ProblemAdakah u sehingga sistem berikut terkontrol?
x = x + ut, x(t0) = x0, x(T ) = xT .
ProblemAdakah u sehingga sistem berikut terkontrol?
x = −x + 2x + u, x(t0) = x0, x(T ) = xT , x(t0) = v0.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 25 / 42
Teorema Keterkontrolan
Diberikan sistem dinamik linear dan time-invariant:
x = Ax + Bu
dengan A berukuran n× n.
TheoremSistem dinamik di atas controllable (terkontrol) jika dan hanya jikacontrollability matrix
M = [B AB A2B . . . An−1B ]
berpangkat penuh, yaitu rank(M) = n. Bukti: lihat, misalnya, Ogata(1997), hal. 737.
Teorema di atas hanya menjamin keterkontrolan sistem tetapi tidakmemberikan fungsi input u yang dapat mengontrol sistem.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 26 / 42
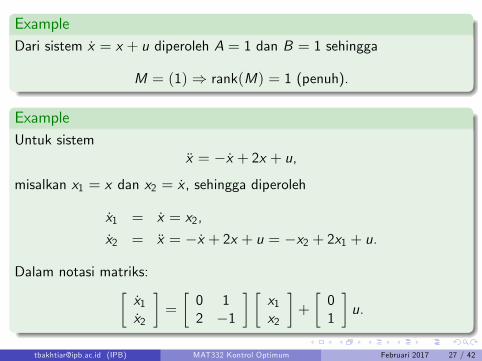
ExampleDari sistem x = x + u diperoleh A = 1 dan B = 1 sehingga
M = (1)⇒ rank(M) = 1 (penuh).
ExampleUntuk sistem
x = −x + 2x + u,misalkan x1 = x dan x2 = x , sehingga diperoleh
x1 = x = x2,
x2 = x = −x + 2x + u = −x2 + 2x1 + u.
Dalam notasi matriks:[x1x2
]=
[0 12 −1
] [x1x2
]+
[01
]u.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 27 / 42
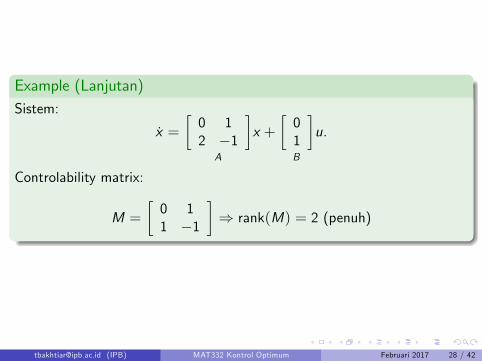
Example (Lanjutan)Sistem:
x =[0 12 −1
]A
x +[01
]B
u.
Controlability matrix:
M =
[0 11 −1
]⇒ rank(M) = 2 (penuh)
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 28 / 42
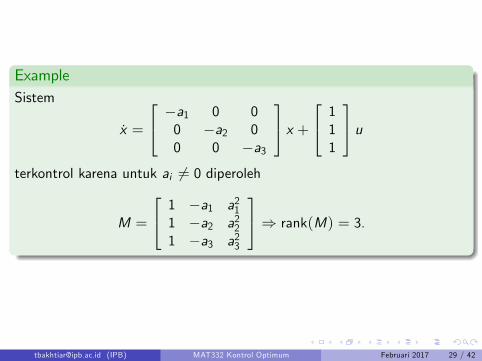
ExampleSistem
x =
−a1 0 00 −a2 00 0 −a3
x + 111
uterkontrol karena untuk ai 6= 0 diperoleh
M =
1 −a1 a211 −a2 a221 −a3 a23
⇒ rank(M) = 3.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 29 / 42
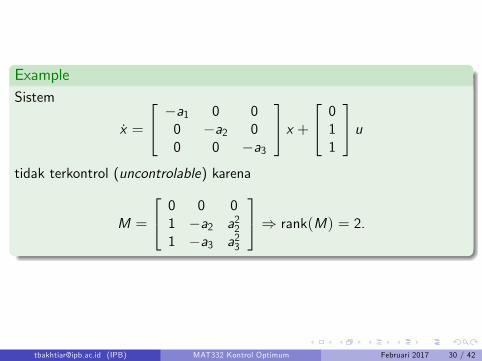
ExampleSistem
x =
−a1 0 00 −a2 00 0 −a3
x + 011
utidak terkontrol (uncontrolable) karena
M =
0 0 01 −a2 a221 −a3 a23
⇒ rank(M) = 2.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 30 / 42
ProblemPeriksa keterkontrolan sistem-sistem berikut:
x =
−1 1 00 −1 00 0 −2
x + 011
u.x =
[a b0 c
]x +
[10
]u.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 31 / 42
Sistem Kendali (Control System)
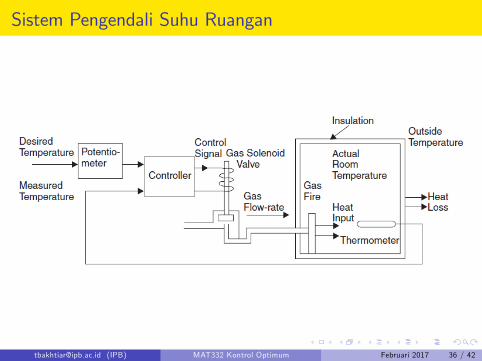
Sistem: susunan, himpunan, atau kumpulan benda (komponen fisik)yang saling berhubungan dan saling memengaruhi sebagai sebuahkesatuan. Contoh: sistem pengatur suhu, sistem kesetimbangantubuh, sistem perekonomian, dsb.
Kendali: pengendali (control), pengatur (regulator).Sistem kendali: susunan beberapa komponen fisik yang salingterhubung sedemikian sehingga dapatmengatur/mengendalikan/memerintah diri sendiri atau sistem lain.
Bagian-bagian sistem kendali:1 Sistem (proses, plant)2 Input: rangsangan, tindakan, perintah (biasanya dari luar) kepadasistem agar melakukan sesuatu.
3 Output: respon dari sistem akibat input.4 Disturbance input (noisy, exogeneous input): angin, gelombang, sinarmatahari, dsb.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 32 / 42
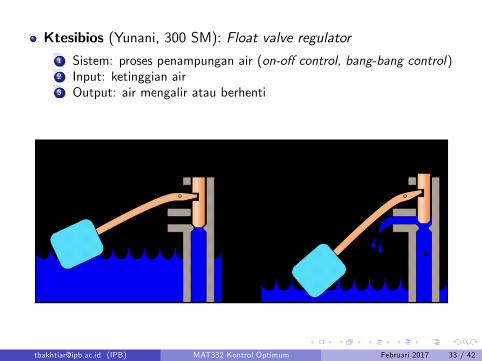
Ktesibios (Yunani, 300 SM): Float valve regulator1 Sistem: proses penampungan air (on-off control, bang-bang control)2 Input: ketinggian air3 Output: air mengalir atau berhenti
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 33 / 42
Berdasarkan cara pengendalian (control action), sistem dibedakan atas:
1 Open-loop system: sistem yang tidak mempertimbangkan outputdalam proses selanjutnya. Contoh: mesin cuci, AC, microwave, lampulalu-lintas.
I lebih sederhana, lebih murah, kurang presisiI selalu stabil
2 Closed-loop system: sistem yang menggunakan output sebagaiumpanbalik (feedback) dalam proses selanjutnya. Contoh: katupKtesibios, autopilot, AC automatik, dsb.
I lebih rumit, butuh sensor untuk mencatat output (karena itu lebihmahal), lebih presisi
I bisa menjadi takstabil
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 34 / 42
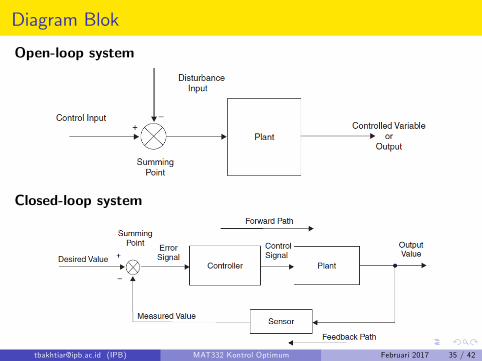
Diagram Blok
Open-loop system
Closed-loop system
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 35 / 42
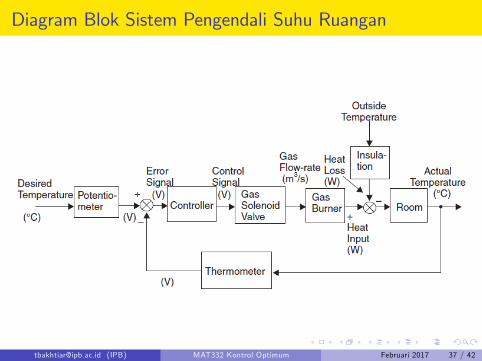
Diagram Blok Sistem Pengendali Suhu Ruangan
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 37 / 42
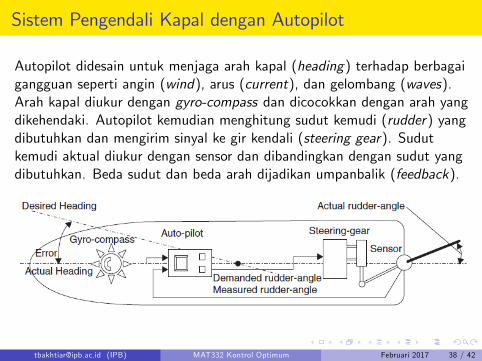
Sistem Pengendali Kapal dengan Autopilot
Autopilot didesain untuk menjaga arah kapal (heading) terhadap berbagaigangguan seperti angin (wind), arus (current), dan gelombang (waves).Arah kapal diukur dengan gyro-compass dan dicocokkan dengan arah yangdikehendaki. Autopilot kemudian menghitung sudut kemudi (rudder) yangdibutuhkan dan mengirim sinyal ke gir kendali (steering gear). Sudutkemudi aktual diukur dengan sensor dan dibandingkan dengan sudut yangdibutuhkan. Beda sudut dan beda arah dijadikan umpanbalik (feedback).
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 38 / 42
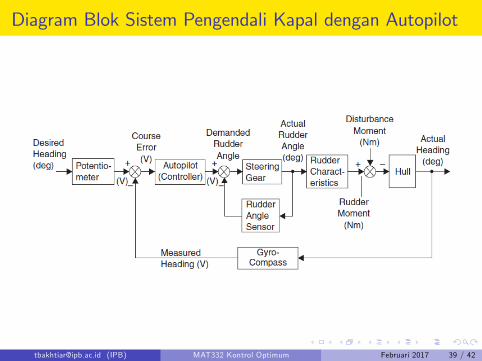
Diagram Blok Sistem Pengendali Kapal dengan Autopilot
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 39 / 42
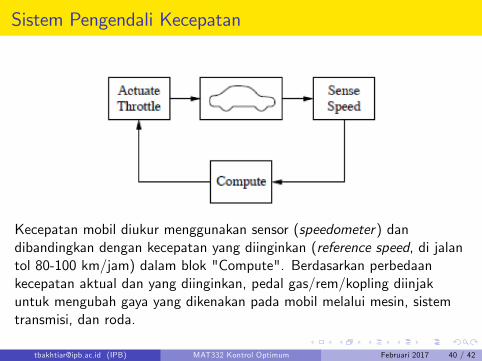
Sistem Pengendali Kecepatan
Kecepatan mobil diukur menggunakan sensor (speedometer) dandibandingkan dengan kecepatan yang diinginkan (reference speed, di jalantol 80-100 km/jam) dalam blok "Compute". Berdasarkan perbedaankecepatan aktual dan yang diinginkan, pedal gas/rem/kopling diinjakuntuk mengubah gaya yang dikenakan pada mobil melalui mesin, sistemtransmisi, dan roda.
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 40 / 42
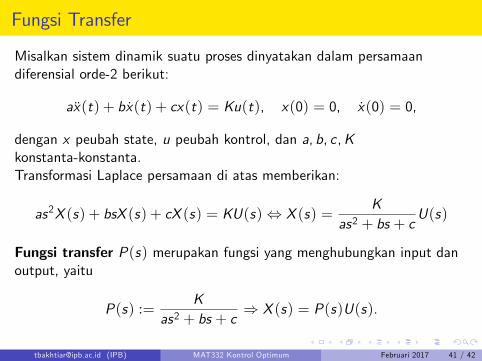
Fungsi Transfer
Misalkan sistem dinamik suatu proses dinyatakan dalam persamaandiferensial orde-2 berikut:
ax(t) + bx(t) + cx(t) = Ku(t), x(0) = 0, x(0) = 0,
dengan x peubah state, u peubah kontrol, dan a, b, c ,Kkonstanta-konstanta.Transformasi Laplace persamaan di atas memberikan:
as2X (s) + bsX (s) + cX (s) = KU(s)⇔ X (s) =K
as2 + bs + cU(s)
Fungsi transfer P(s) merupakan fungsi yang menghubungkan input danoutput, yaitu
P(s) :=K
as2 + bs + c⇒ X (s) = P(s)U(s).
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 41 / 42
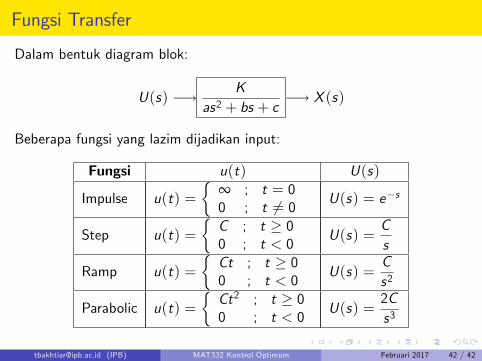
Fungsi Transfer
Dalam bentuk diagram blok:
U(s) −→ Kas2 + bs + c
−→ X (s)
Beberapa fungsi yang lazim dijadikan input:
Fungsi u(t) U(s)
Impulse u(t) =
∞ ; t = 00 ; t 6= 0 U(s) = e−s
Step u(t) =C ; t ≥ 00 ; t < 0
U(s) =Cs
Ramp u(t) =Ct ; t ≥ 00 ; t < 0
U(s) =Cs2
Parabolic u(t) =Ct2 ; t ≥ 00 ; t < 0
U(s) =2Cs3
[email protected] (IPB) MAT332 Kontrol Optimum Februari 2017 42 / 42