-
7/31/2019 Kande Project 1
1/110
i
Abstract
The intended objective of this project is to generate
manufacturing test patterns for
combinational circuits. The best known algorithms that have been
used in manufacturing test
equipment are the D and Podem algorithms. This project
demonstrates ATPG test generation by
going through Verilog RTL design synthesis, place and route,
logic simulation, fault simulation
and ATPG for manufacturing tests. The synopsys EDA tools such as
design compiler, design
vision, VCS (Synopsys Verilog Compiler Simulator), TetraMax, and
DVE (Discovery Visual
Environment) have been investigated along with sequential and
combinatorial circuit examples
to demonstrate the project objective. The project also gives
users an introduction and easy
navigation through the UNIX environment.
-
7/31/2019 Kande Project 1
2/110
ii
Table of Contents
ABSTRACT
.................................................................................................................................................................
I
ACKNOWLEDGMENT
.......................................................................................................................................
VIII
PREFACE
.................................................................................................................................................................
IX
CONVENTIONS
........................................................................................................................................................
X
I. INTRODUCTION TO DIGITAL DESIGN FLOW
............................................................................................
1
II.INTRODUCTION TO VERILOG AND VERILOG COMPILED CODE SIMULATOR
(VCS) .................. 4
2.1 WHAT IS HDL?
................................................................................................................................................
4
2.2 VERILOG
..........................................................................................................................................................
4
2.3 STRUCTURE OF VERILOG MODULE
...................................................................................................................
4
2.4 VERILOG PORTS
...............................................................................................................................................
5
2.5 VERILOG OPERATORS
......................................................................................................................................
5
2.6 LOGICAL OPERATORS
......................................................................................................................................
6
2.7 VERILOG BOOLEAN LOGICAL
OPERATORS........................................................................................................
6
2.8 VERILOG REDUCTION LOGICAL OPERATORS
....................................................................................................
7
2.9 VERILOG ARITHMETIC OPERATORS
.................................................................................................................
7
2.10 DATA TYPES
.....................................................................................................................................................
8
2.11 VERILOG PROGRAM
LEVELS.............................................................................................................................
9
III.OVERVIEW OF DESIGN FLOW
.....................................................................................................................
11
IV.COMPILER
..........................................................................................................................................................
12
V.VERILOG COMPILED CODE SIMULATOR (VCS)
....................................................................................
12
VI.OVERVIEW OF OBERON PROFILE SETUP
................................................................................................
14
VII. COMPILATION AND SIMULATION OF RAM
..........................................................................................
17
VIII. DVE (DISCOVERY VISUAL ENVIRONMENT) PROCEDURE
..............................................................
18
8.1 SEARCH FOR SIGNALS OR SCOPES
...................................................................................................................
21
8.2 FINDING VALUES ON THE SIGNAL
...................................................................................................................
23
8.3 DEBUGGING STATE MACHINES USING WAVE
WINDOW....................................................................................
25
8.4 SET AN EXPRESSION/CREATE NEW
SIGNAL....................................................................................................
25
8.5 TRACING DRIVERS AND
LOADS.......................................................................................................................
28
IX.DESIGN
COMPILER..........................................................................................................................................
30
9.1 INTRODUCTION
..............................................................................................................................................
30
9.2 SPECIFY AND LINK TARGET TECHNOLOGY
.....................................................................................................
30
9.3 ANALYZE AND ELABORATE PHASE
................................................................................................................
30
9.4 APPLYING
CONSTRAINTS................................................................................................................................
33
9.5 DESCRIBING THE ENVIRONMENT
....................................................................................................................
33
9.6 OPTIMIZING THE DESIGN
................................................................................................................................
34
9.6.1 Architectural Level
...............................................................................................................................
34
9.6.2 Logic Level Optimizations
....................................................................................................................
34
9.6.3 Gate level Optimizations:
.....................................................................................................................
35
9.7 ANALYSIS OF THE RESULTS
............................................................................................................................
35
9.7.1 Generating textual reports for design properties
.................................................................................
35
-
7/31/2019 Kande Project 1
3/110
iii
9.7.2 Visualizing design objects (GUI)
..........................................................................................................
35
9.8 SAVING DESIGN
..............................................................................................................................................
35
X.DESIGN COMPILER TUTORIAL:
..................................................................................................................
36
XI.DESIGN VISION
.................................................................................................................................................
48
11.1 INTRODUCTION
..............................................................................................................................................
4811.2 FEATURES AND BENEFITS
...............................................................................................................................
48
11.3 OVERVIEW OF DESIGN VISION
PROCESS.........................................................................................................
48
11.4 STARTING DESIGN VISION
.............................................................................................................................
49
11.4.1 Specifying libraries:
...........................................................................................................................
50
11.4.2 Reading source design
........................................................................................................................
51
11.4.3 Setting current design
.........................................................................................................................
51
11.4.4 Defining design environment and setting design
constraints
.............................................................
51
11.4.5 Check design
......................................................................................................................................
53
11.4.6 Compiling the design
..........................................................................................................................
53
11.4.7 Analysis of the design
.........................................................................................................................
53
11.4.8 Saving the design database
................................................................................................................
56
XII. TETRAMAX
......................................................................................................................................................
57
12.1 INTRODUCTION
..............................................................................................................................................
57
12.2 NECESSITY OF
TETRAMAX.............................................................................................................................
57
12.3 INTRODUCING MODERN IC TESTING:
.............................................................................................................
57
12.4 FEATURES AND BENEFITS
...............................................................................................................................
58
12.5 SUPPORTED FAULT MODELS:
..........................................................................................................................
58
12.5.1 Stuck-at fault
......................................................................................................................................
58
12.5.2 Path delay faults
.................................................................................................................................
59
12.5.3 Transition delay model
.......................................................................................................................
59
12.5.4 IDDQ model
.......................................................................................................................................
59
12.5.5 Bridging model
...................................................................................................................................
60
12.6 OVERVIEW OF TETRAMAX:
............................................................................................................................
60
12.7 TETRAMAX TUTORIAL WITH AN EXAMPLE:
....................................................................................................
62
12.7.1 Read design and library files
..............................................................................................................
62
12.7.2 Build model
........................................................................................................................................
63
12.7.3 Design Rule Check (DRC)
..................................................................................................................
64
12.7.4 ATPG patters
......................................................................................................................................
65
12.7.5RVIEWING RESULTS
................................................................................................................................
69
12.7.6SAVING
PATTERNS..................................................................................................................................
69
12.8 DEBUGGING USING TETRAMAX:
....................................................................................................................
71
12.8.1 Analyze the module
.............................................................................................................................
71
12.8.2 View complete module
........................................................................................................................
72
12.8.3 Backward or forward trace
................................................................................................................
7312.8.4 Applying patterns
...............................................................................................................................
74
XIII. IC COMPILER
................................................................................................................................................
75
13.1 INTRODUCTION TO
MILKYWAY.......................................................................................................................
75
13.2 INTRODUCTION TO IC
COMPILER....................................................................................................................
75
13.3 FLOOR PLANNING
..........................................................................................................................................
77
13.3.1 Aspect ratio
........................................................................................................................................
78
-
7/31/2019 Kande Project 1
4/110
iv
13.3.2 Rows of standard cells
........................................................................................................................
78
13.3.3 Power planning
..................................................................................................................................
78
13.3.4 Pin placement
.....................................................................................................................................
78
13.3.5 Macro placement
................................................................................................................................
78
13.4 PLACEMENT
...................................................................................................................................................
79
13.4.1 Constructive algorithm
.......................................................................................................................
79
13.4.2 Iterative algorithm
..............................................................................................................................
7913.5
ROUTING........................................................................................................................................................
79
13.5.1 Global routing
....................................................................................................................................
80
13.5.2 Detailed routing
.................................................................................................................................
80
13.6 END PRODUCTS OF IC COMPILER STAGE
.........................................................................................................
80
XIV. PRIMETIME
....................................................................................................................................................
81
14.1 INTRODUCTION
..............................................................................................................................................
81
14.2 COMPARING PRIMETIME WITH DESIGN COMPILER
.........................................................................................
81
XV. CONCLUSIONS:
...............................................................................................................................................
82
XVI. REFERENCES
.................................................................................................................................................
84XVII. APPENDIX A: VERILOG CODES
..............................................................................................................
85
XVIII. APPENDIX B: ACRONYMS
.......................................................................................................................
96
XIX. APPENDIX C: FILE EXTENSIONS
.............................................................................................................
97
XX. APPENDIX D: TROUBLE
SHOOTING.........................................................................................................
99
-
7/31/2019 Kande Project 1
5/110
v
List of figures
Figure 1: Stages of ASIC Implementation
.....................................................................................................................
1
Figure 2: Over view of the entire process
....................................................................................................................
11
Figure 3:
Compiler.......................................................................................................................................................
12
Figure 4: Process related to VCS
.................................................................................................................................
13
Figure 5: VCS detailed process
...................................................................................................................................
14
Figure 6: Complete scenario of user account
...............................................................................................................
15
Figure 7: DVE and its brief description
.......................................................................................................................
19
Figure 8: Complete GUI view of RAM through DVE.............
........... .......... .......... ........... ..........
........... .......... ........... 20
Figure 9: Showing RAM with waveform view...................
.......... ........... .......... ........... ..........
........... .......... .......... ...... 21
Figure 10: Debugging the design by analyzing search
options............ ........... .......... ........... ..........
.......... ........... ......... 22
Figure 11: Debugging the design by analyzing search
options............ ........... .......... ........... ..........
.......... ........... ......... 22
Figure 12: Alternate way of searching the signal ..........
.......... ........... .......... .......... ........... ..........
........... .......... ........... 23
Figure 13: Figure 9.4: Importance of check box ..........
.......... ........... .......... ........... ..........
........... .......... ........... .......... .. 23
Figure 14: Available options in finding values on the signal
........... .......... ........... .......... ...........
.......... .......... ........... .. 23
Figure 15: Searching for value on the signal Q [7:0] in a RAM
.......... ........... .......... ........... ..........
........... .......... ......... 24
Figure 16: Moving wave window to the top level ..........
........... .......... ........... .......... ...........
.......... ........... .......... ......... 24Figure 17: Setting
the top level name
..........................................................................................................................
24
Figure 18: Setting name to state machine signal ............
........... .......... ........... .......... ...........
.......... ........... .......... ......... 25
Figure 19: Result of setting state names
......................................................................................................................
25
Figure 20: Showing wave window with new signal updates
.......... ........... .......... .......... ........... ..........
.......... ........... .... 25
Figure 21: Setting expression to identify reading phase
..............................................................................................
26
Figure 22: Available options to grid a signal
...............................................................................................................
27
Figure 23: Picture showing grid on rand signal of a module for
convenience .......... ........... .......... ..........
........... ......... 27
Figure 24: Grid properties ............ ........... ..........
........... .......... .......... ........... ..........
........... .......... ........... .......... ........... 27
Figure 25: Trace drivers by right click on the
signals................ .......... ........... ..........
........... .......... ........... .......... ......... 28
Figure 26: Trace drivers by clicking on tool bar ..........
.......... ........... .......... ........... ..........
........... .......... ........... .......... .. 28
Figure 27: DVE showing drivers of rand signal ..........
.......... ........... .......... ........... ..........
........... .......... ........... .......... .. 28
Figure 28: Point drivers ofrandin console pane
.........................................................................................................
29
Figure 29: Design compiler process
............................................................................................................................
31
Figure 30: Design Compiler and its internal process
...................................................................................................
32
Figure 31: Fragment of report showing ports ..........
........... .......... ........... .......... ...........
.......... ........... .......... .......... ...... 40
Figure 32: Fragment of compilation phase
..................................................................................................................
42
Figure 33: Qor report showing over all statistics of the design
......... ........... .......... ........... .......... ...........
.......... ........... 43
Figure 34: Hierarchical area report
..............................................................................................................................
44
Figure 35: Timing report
.............................................................................................................................................
45
Figure 36: Report showing references to ram module
.................................................................................................
46
Figure 37: Constraints report and their status
..............................................................................................................
47
Figure 38: Design Vision Overview
............................................................................................................................
49
Figure 39: Design Vision GUI
.....................................................................................................................................
49Figure 40: Library files in design vision
......................................................................................................................
50
Figure 41: Analyze, elaborate and read options in Design Vision
...............................................................................
51
Figure 42: Design rule constraints
...............................................................................................................................
52
Figure 43: List of all the input/output in the design ..........
........... .......... .......... ........... ..........
........... .......... ........... ....... 53
Figure 44: Settings for timing report ........... ...........
.......... ........... .......... ........... .......... ..........
........... .......... ........... ....... 54
Figure 45: Schematic view
..........................................................................................................................................
54
Figure 46: From the tool bar
........................................................................................................................................
55
Figure 47: Schematic view of ram
...............................................................................................................................
55
-
7/31/2019 Kande Project 1
6/110
vi
Figure 48: Available timing analysis options ..........
........... .......... ........... .......... ...........
.......... ........... .......... .......... ...... 55
Figure 49: Post synthesis results of RAM using dve ..........
.......... ........... .......... ........... ..........
........... .......... ........... ..... 56
Figure 50: Modern IC testing
......................................................................................................................................
58
Figure 51: Circuit to explain stuck-at fault
..................................................................................................................
59
Figure 52: Response of a circuit with a node stuck-at 1
.......... ........... .......... .......... ........... ..........
.......... ........... ........... 59
Figure 53: Overview of TetraMax process [15] ..........
.......... ........... .......... ........... ..........
........... .......... ........... .......... .. 60
Figure 54: GUI of TetraMax showing various components
.................. ........... .......... .......... ...........
.......... ........... ....... 61
Figure 55: GSV tool bar
..............................................................................................................................................
62
Figure 56: Check box if the netlist is Library module ..........
.......... ........... .......... .......... ........... ..........
........... .......... .... 62
Figure 57: build model of TetraMax............ ...........
.......... ........... .......... .......... ........... ..........
........... .......... ........... ....... 63
Figure 58: Build model specifications
.........................................................................................................................
63
Figure 59: ATPG showing initializing of faults .................
.......... ........... .......... ........... ..........
........... .......... .......... ...... 66
Figure 60: Three ATPG engines
..................................................................................................................................
67
Figure 61: Fault classes and their groups .......... ...........
.......... ........... .......... ........... ..........
........... .......... .......... ........... .. 69
Figure 62: Saving of patterns in available formats .........
........... .......... ........... .......... ...........
.......... ........... .......... ......... 70
Figure 63: Analyzing stuck-at faults
............................................................................................................................
71
Figure 64: Showing 100 stuck-at faults from which user can
select a port to analyze ............... .......... ..........
........... .. 71
Figure 65: Setup dialog box showing primitive and design
.......... ........... .......... ........... ..........
........... .......... .......... ...... 72Figure 66: GSV showing
primitive view
.....................................................................................................................
72
Figure 67: Design settings and its view
.......................................................................................................................
72
Figure 68: Forward/backward trace
.............................................................................................................................
73
Figure 69: Select port to be traced
...............................................................................................................................
73
Figure 70: Observe backward trace of primitive 9 .........
........... .......... ........... .......... ...........
.......... ........... .......... ......... 74
Figure 71: Selecting patter to be applied to module ...........
.......... ........... .......... ........... ..........
........... .......... ........... ..... 74
Figure 72: Pattern application
......................................................................................................................................
74
Figure 73: Outline of IC compiler stage
......................................................................................................................
76
Figure 74: Example of a floor plan
..............................................................................................................................
77
Figure 75: Gcell or routing grid or routing bin ..........
........... .......... .......... ........... ..........
........... .......... ........... .......... .... 79
Figure 76: Interconnection of gcells by global router ..........
.......... ........... .......... .......... ........... ..........
........... .......... .... 80
-
7/31/2019 Kande Project 1
7/110
vii
List of tables
Table 1: Bitwise logical operators ....... ...........
.......... ........... .......... ........... .......... ..........
........... .......... .......... ........... ...... 6
Table 2: Boolean logical operators
................................................................................................................................
6
Table 3: Reduction Logical Operators
...........................................................................................................................
7
Table 4: Verilog Arithmetic Operators
..........................................................................................................................
7
Table 5: Data types of Verilog ......... ........... ...........
.......... ........... .......... .......... ........... ..........
........... .......... ........... ......... 8
Table 6: Various Verilog simulators and their manufacturers
.......... .......... ........... .......... ........... ..........
.......... ........... .. 12
Table 7: Logic level optimization showing structuring ..........
........... .......... .......... ........... .......... ..........
........... ........... 35
Table 8: Synopsys standard library units
.....................................................................................................................
39
Table 9: Highlighting parameters of noramal ATPG and auto ATPG
.......... .......... ........... .......... ........... ..........
........... 69
Table 10: End products of IC compiler ...................
........... .......... ........... .......... ...........
.......... ........... .......... .......... ...... 80
Table 11: Results of Design Compiler stage (using Single port
ram used) ................ .......... ........... ..........
........... ....... 82
Table 12: Conclusions of TetraMax (using addsubtract)
.............................................................................................
82
Table 13: Invoking command for corresponding process
............................................................................................
83
-
7/31/2019 Kande Project 1
8/110
viii
Acknowledgment
This project presents a two years effort of pursuing excellence
in education and personal goals. It
represents my Masters project and makes me feel happy as this is
a part of my interest. During
my research, lot of people extended support technically and
morally. It is my real pleasure to
thank those people who made this research possible. I would like
to give special thanks to myadvisor, Dr. Reza Raeisi, for his
support throughout my research. I am very much thankful to
ECE department staff and faculty for clarifying my queries.
Also, I would like to thank my dear family. This research would
have not been accomplished
without their support. I take this opportunity to thank
department of Electrical and Computer
Engineering for providing me financial support by giving me
Teaching Associate position.
Finally and most important, to everyone who stood by me in all
times, supported and gave me
strength to face all the difficulties.
-
7/31/2019 Kande Project 1
9/110
ix
Preface
I choose this project mainly because of my special interest in
VLSI digital testing. I wanted to
get familiar with the design flow process. As a part of my
interest I documented the process of
design flow in this research project.
Motivation for this research is the course ECE 242 where testing
procedures for digital designs
are introduced.
Audience
This document stands as reference for design engineers and
design verification engineers who
want to gain experience in using Synopsys tools for synthesis,
analysis, generating test-patterns
(DFT process), and placement and routing of a RTL model designed
in Verilog. For better
understanding, familiarity with the below listed process is
required
Compilation using VCS
Design compiler and Design visionfor synthesis TetraMaxfor
generating test-patterns IC compilerfor placement and routing
-
7/31/2019 Kande Project 1
10/110
x
Conventions
The following conventions are used in this documentation.
Convention Description
Courier
Courier italic
Courier bold
[]
|
_
\
/
units
case sensitive
Indicates command syntax.
Indicates a user-defined value in Synopsys
syntax, such as object_name. A user
defined value that is not Synopsys syntax.
Indicates user inputtext you typeverbatimin Synopsys syntax
and
examples.
Denotes optional parameters, such aspin1 [pin2 ..pinN]
Indicates a choice among alternatives, such
as low | medium | high
Connects terms that are read as a single term
by the system, such asset_input_delay
Indicates a continuation of a command line
Indicates levels of directory structure
Library units for area- , time - sec
All the commands are case sensitive;
create_clock CLK is different fromcreate_clock Clk.
-
7/31/2019 Kande Project 1
11/110
1
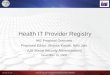
I. Introduction to digital design flowIntegrated Circuits (IC)
revolutionized modern electronics by serving wider range of
applications, and with their low cost and performance efficiency
they replaced huge transistor
circuits. Application Specific IC (ASIC) is a combination of
digital and analog circuits packed
into an IC to achieve the desired control/computation function
[3]. Advancement of technologyin different areas accordingly led to
increase in performance and requirements in that area. This
led to the advent of ASICs to achieve performance in required
areas with reasonable cost.
Typical implementation of ICs involves three phases.
Figure 1: Stages of ASIC Implementation
Idea
Requirements
Approach
Design entry
and RTL
Gate level
Netlist
Design
Verification
Physical Design
Implementation
IC Fabricationand Testing
Production and
Monitoring
Synthesis
DVE and TmaxIC compilerPrimetime
Definition and
Exploration phase
Implementation
phase
Manufacturing and
Production phase
GSDII
-
7/31/2019 Kande Project 1
12/110
2
Implementation flowchart, figure 1 gives detailed process of
real-time ASIC implementation. In
this research project definition and exploration phase and
implementation phase are discussed in
detailed. During definition and exploration phase idea to be
implemented, specifications like:
speed, power, and functionality, technology constraints like:
size and space are considered. After
specifications are decided the idea advances through
implementation phase where actual
designing takes place.
Implementation phase is an important phase where most of the
specifications are met upon
careful examination. In this phase synopsys tools such as
Verilog Compiled code Simulator
(VCS), design compiler, primetime, IC compiler, and Discovery
Visual Environment (DVE) are
used to bring shape to the initial idea. Basic implementation of
the idea is done in Register
Transfer Level (RTL). RTL is expressed usually in hardware
description language (HDL) like
Verilog or VHDL. A Hardware Description Language (HDL) is a
language used to describe a
digital system, for example, a network switch, a microprocessor
or a memory or a simple flip-
flop. This just means that, by using a HDL one can describe any
hardware (digital) at any level.
Functional/Logical verification is performed at this stage to
ensure the RTL design matches the
idea [2]. Synopsys VCS is used to simulate and debug the RTL
design. Next stage to debug and
simulate is transformation of RTL into gate-level netlist. This
process of transforming RTL to
gate-level netlist is called synthesis, and is done using the
tools namely Design Compiler
(Synopsys), RTL compiler (Cadence), Blast Create (Magma).
Design compiler is emphasized in this project. Design compiler
along with standard 90nm cell
library converts RTL in to gate-level standard cells at the
leaves of the design. Next step in
implementation phase is design verification and physical
implementation of the design. Tools
like DVE and TetraMax are used to verify the design. DVE takes
either RTL or gate-level design
as input and provides excellent amenities to debug and provide
good understanding of designs
functionality. TetraMax (Tmax in short) is another exceptional
tool provided by Synopsys. Tmax
accepts the synthesized output from design compiler stage along
with 90nm standard cell library
as input, and after following few significant steps it generates
test patterns. These test patterns
verify complete functioning of the design by assuming the
present design as faulty model. Tmax
also provides ways to debug the design using these test
patterns. Complete information regarding
these debugging features is discussed later in this project.
Physical design implementation is nothing but geometric
representation of gate-level netlist.
Geometric representation is designing layout for the design
according to guidelines and
limitations specified in the library files. This process is
taken care by IC compiler which is again
a part of Synopsys. Three steps that are followed to complete
the physical implementation are
floor planning, placement, and routing. These processes are
self-explanatory as per their names.
In floor planning vital features like size of the chip, pin
assignment, type of clocks and power
planning is done. Placement first determines how each gate
should be placed on the chip.
Routing will then wire these gates together, using heuristic
algorithms to group together related
gates and tweak placement in order to minimize routing
congestion and wire delay [4]. All these
-
7/31/2019 Kande Project 1
13/110
3
details are given to manufacturers in the form of GDSII file as
shown in figure 1. Some of the
similar tools are Blast Fusion (Magma), and Encounter (Cadence).
Another important process
that is followed in the ASIC implementation is Static Time
Analysis (STA) using primetime (PT
synopsys). Prime time checks for violations in the same way that
you would do it manually, but
with much greater speed and accuracy. PT breaks the design down
into set of timing paths,
calculates signal propagation delay along each path, check
violation of timing constraints inside
the design and at the input/output interface.
-
7/31/2019 Kande Project 1
14/110
4
II.Introduction to Verilog and Verilog Compiled code Simulator
(VCS)2.1 What is HDL?
Hardware Description Language (HDL) is a Computer-Aided Design
(CAD) tool for the modern
design and synthesis of digital design. Due to increase in the
complexity of digital designs,realization of such circuits with
Integrated Circuits (ICs) became impossible. This realization
required sophisticated CAD tools which includes HDL. The
designer uses HDL to describe the
system in a computer language, such as C. Debugging a HDL design
is stress-free as it includes
packages that implement simulator and test benches [5]. The two
streams of HDL that are widely
used are VHDL and Verilog. In this research project I confine my
discussion to Verilog.
2.2 VerilogVerilog in non-technical sense is a textual
representation of electronic circuits and systems.
Through Verilog electronic design can be analyzed by verifying
through simulation, timinganalysis, logic synthesis, and test
analysis. The history of Verilog takes back to 1980s when a
company called Gateway Design Automation developed a HDL for its
newly introduced logic
simulator, Verilog-XL. Taking over Gateway Design Automation,
Cadence brought Verilog
language into public domain in 1990. In December 1995, Verilog
HDL became IEEE standard
1364-1995 [5].
2.3 Structure of Verilog moduleVerilog modules structure is
similar to other software languages such as C. Source code is
written in high-level language in an editor provided by HDL
package, in regards to this researchproject vi editor is used.
Verilog module consists of a declaration and a body. The
declaration
is part of program where input, output, and inout ports are
listed. In the body a meaningful
relation between these declared ports is done.
// D-Flip Flop showing input signal (d), output (q), Clock
//(clk), and reset
`define TICK #2 //Flip-flop delay
module dflipflop (d, clk, reset, q);
inputd, clk, reset;
outputq;regq;
always @ (posedge clk or posedge reset)
begin
if (reset) begin
q
-
7/31/2019 Kande Project 1
15/110
5
else begin //perform buffer
q
-
7/31/2019 Kande Project 1
16/110
6
2.6 Logical OperatorsVerilog logical operators are internally
classified into three groups: bitwise, boolean logical, and
reduction. Table 1.1 shows Verilog Bitwise logical operators
Table 1: Bitwise logical operators [5]
Operators Equivalent Logic Operand Type Result type
& Bit Bit
| Bit Bit
~(&) Bit Bit
~(|) Bit Bit
^ Bit Bit
~^ Bit Bit
~ Bit Bit
Consider the following example of bitwise logical operators; A=
1010, B= 0101, and F = A|B
The name bitwise is self-explanatory, which means the operation
is done bit by bit. According to
the values assumed F is a 4 bit signal 1111.
2.7 Verilog Boolean logical operatorsBoolean logical operators
respond with 1 (true value) or 0 (false value) for an
expression.
Considering an example will make the concepts clear. A= 1000, B=
0111 if F= A||B then F =1.Table 2 shows various Boolean logical
operators.
Table 2: Boolean logical operators [5]
Operator Operation Number of operands
&& AND Two
|| OR Two
-
7/31/2019 Kande Project 1
17/110
7
2.8 Verilog Reduction logical operatorsThe self-explanatory term
reduction operator states some form of reduction to the input
bits.
This is explained clearly with the help of an example, statement
F=|A, A= 0110 gives an output
of (0 |1|1|0) 1.Various reduction operators and their symbols
are given in table 3.
Table 3: Reduction Logical Operators
Operator Operation Number of operands
& Reduction AND One
| Reduction OR One
~& Reduction NAND One
~ | Reduction NOR One
^ Reduction XOR One
~^ Reduction XNOR One
! NEGATION One
2.9 Verilog Arithmetic OperatorsAll the arithmetic operations
are performed with the help of arithmetic operators and its syntax
is
generally given by F= A (operator) B, this operator can be
replaced by any arithmetic operators
from table 4. An example of arithmetic operator is Modulus, F =
(A % B) returns the remainder
of (A/B).
Table 4: Verilog Arithmetic Operators [5]
Operator Description A or B type F type
+Addition
A+BA numericB numeric
numeric
-Subtraction
AB
A numeric
B numericnumeric
*Multiplication
A*B
A numeric
B numericnumeric
/Division
A/BA numericB numeric
Numeric
%Modulus
A%B
A numeric, not real
B numeric, not realnumeric, not real
**Exponent
A**B
A numeric
B numericNumeric
{,}Concatenation
{A,B}
A numeric or array
B numeric or arraySame as A
-
7/31/2019 Kande Project 1
18/110
8
2.10 Data typesData type refers to data storage format that
contains a specific type or range of values. As HDL
is used to describe the digital circuits in the form of text,
several formats are required to serve the
purpose. For instance, when a signal is defined we need to
specify its type so that we restrict the
signal to admit only few values. Verilog data types are
discussed in the following section.
Verilog supports numerous data types namely: nets, integer,
registers, parameters, and arrays.
Table 5: Data types of Verilog
Data type Predefine word Syntax Explanation
Nets Wirewire sum;
wire sum= 1b 0
Here in the first case a net
named sum is defined and in
the second case sum is
declared along with a value
assigned to it.
Note: nets do not have any
memory, they are used todrive circuits or as an
interconnection.
Register Reg reg q;
A variable q of register type
is defined.
Note: unlike nets register
data type stores values until
they are updated.
Vector
wire or
reg with
variables
enclosed in []
wire[2:0]x = 3b100;
reg[2:0]y = 3b 101
Here in both the cases
variables x, y are single
variables holding multiple
bits.
Integer Integer Integer k1;Variable k1 is defined as an
integer data type.
Real Real Real average;
Real data type can hold
even floating values along
with integers
Parameter Parameter Parameter M= 2;
Parameter is similar concept
to that of global variables in
C or any other programminglanguage
Array NA
Reg [2:0] x [0:2]
X22 1 0
X12 1 0
X02 1 0
Function of Array is to hold
multiple vectors together.
Here x can hold 3 variables
of 3 bits each.
-
7/31/2019 Kande Project 1
19/110
9
These data types are used throughout this research project in
various programs. Table 5 shows
different data types and their declaration syntax along with
their explanations. And regarding
arrays, Verilog only supports single dimension array.
2.11 Verilog Program levelsVerilog can be used to program the
digital designs at various levels namely; behavioral level,
register transfer level, and gate level.
Behavioral Level: When a design is behavioral model, the module
will include predefined
words such as always or initial. Describing the design in
algorithmic way, the
functionality is defined by which operation must occur, not by
how they are implemented in
hardware. Behavioral code is faster to simulate and easy to
debug. Behavioral code is not
synthesizable.
module half_adder (X, Y, Sum, Carry);
inputX, Y;
outputsum, carry;regsum, carry;
always @(X, Y)
begin
sum = X^ Y;
carry= X&Y;
end
endmodule
Program 3: Behavioral program for half adder
Register transfer level: RTL design is synthesizable; this is
the noticeable feature of RTL. RTL
is description of the function at block level where each block
may be synthesizable. The code is
characterized by arithmetic expressions. In RTL design, all the
registers are defined and
combination logic is implemented. RTL design is technology and
library dependent unlike
behavioral.
module half_adder (X, Y, Sum, Carry);
inputX, Y;
outputsum, carry;
xor x1(sum, X, Y);
and a1(carry, X, Y);
endmodule Program 4: RTL program for half adder
Gate level: The process of synthesized output is the gate-level.
In this project we use tools
developed by Synopsys to convert RTL to gate-level.
module full adder ( a, b, c, sum, carry );
input a, b, c;
output sum, carry;
-
7/31/2019 Kande Project 1
20/110
10
wire n1;
XOR2X1 U1 ( .IN1(c), .IN2(n1), .Q(sum) );
AO22X1 U2 ( .IN1(a), .IN2(b), .IN3(c), .IN4(n1),
.Q(carry) );
XOR2X1 U3 ( .IN1(a), .IN2(b), .Q(n1) );
endmoduleProgram 5: Gate level program of fulladder after
synthesized
Above three modes of Verilog programming has their own merits
and usages but in this project
RTL and gate-level are used. Program 5 is gate-level and plays
vital role in the entire process,
acts as inputs to almost all the tools.
-
7/31/2019 Kande Project 1
21/110
11
III. Overview of Design flowFigure 2: Over view of the entire
process
-
7/31/2019 Kande Project 1
22/110
-
7/31/2019 Kande Project 1
23/110
13
Figure 4: Process related to VCS
-
7/31/2019 Kande Project 1
24/110
14
Significant processes of this section are:
1. Compilation of Verilog source code2. Simulation of design to
review the results3. Debugging graphically with the help of
DVE.
Figure 5 shows process in detail and explains how VCS is
responsible for viewing and
debugging a design.
Figure 5: VCS detailed process
From figure 5 it is clear that VCS takes RTL code and test bench
as input. In the process ofsimulation VCS compiles the code into C
source files which are in general referred as object
files. Upon conversion to object files VCS invokes C compiler
which generates executable file
(Simv in our case) that is responsible for debugging and
graphical representation of design. DVEis responsible for GUI
debugging of the design. In order to start the process of
simulation one
should go through certain process which is discussed in the
following sections.
VI. Overview of Oberon profile setupEntire process of simulation
and design flow takes place in working directory of oberon.Working
directory internally consists of three folders source, lib, and
work. Before the process of
design flow is started, all these folders should be created and
complete scenario of this folder
system is given in figure 6.
Verilog
design (RTL)
VCS
Value Change
Dump (VPD)
DVE
Verilog
Testbench
Sim results
using Test
Simv
C source file
(Object file)
Executable File
C compiler RTL Simulation
-
7/31/2019 Kande Project 1
25/110
15
Figure 6: Complete scenario of user account
Step 1:
After logging into the Oberon server create a working directory,
where entire process is going to
take place. In figure 6 working directory is Verilog. This is
just an example you can have your
own names for the working directory.
[mallik@oberon ~]mkdir verilog
Keep in mind that all the operations are to be performed only
after you login into the working
directory. After this is accomplished, enter into the directory
using the following command;
[mallik@oberon ~]cdverilog[mallik@oberon verilog]cdsource
[mallik@oberon verilog]cdlib
[mallik@oberon verilog]cd ..
[mallik@oberon verilog]source /usr/local/scripts/synopsys
At this point of time as shown in figure 6, user is logged into
working directory and has created
three folders with specific names. To view this, use ls at the
terminal to have a look at contents
of the directory. Last line in the above set of commands is the
most important and should be
given at the terminal every time user logs in.
Step 2:
Once user is in the working directory, he/she can enter into the
source sub-directory and start
writing or editing code by opening a text editor. To open a text
editor one need to use command
vi file_name. After coding is done press shift+zz without
exiting the editor and it saves the workdone taking user back to
main screen.
Write the testbench for the following code using the same method
discussed above but using a
Verilog
(Working directory)
Source
Work
lib
User enters intooberon server
Library files
Programs
folder
Intermediate files
form Synopsys tool
-
7/31/2019 Kande Project 1
26/110
16
different file name or just modifying the file name. For example
for the file name.v the testbench
can be name_tb.v so that there is no confusion.
Step 3:
After the program is written, to make sure the program is
without any flaws we need to compilethe program along with the
testbench. To compile the program, get back to the working
directory and enter the following commands at the terminal.
[mallik@oberon verilog]vcs PP name.v name_testbench.v
Above command compiles the code and the corresponding testbench.
In case of any errors while
compilation one needs to check the code and remove errors. After
successful compilations of the
code, user advances into the process of simulation. In case user
wants to save time in running
these commands, commands can be saved in a text file with an
extension of .f in the same
subdirectory where all the main files exists. Once this file is
saved, to execute we follow thecommand as shown
[mallik@oberon verilog]vcs PP file.f
Step 4:
Compilation of the file is done, now what? We have to check for
the simulation results. To check
the simulation results according to the inputs specified in
testbench we use the command ./simv.
./simvat the terminal creates a file in the working directory
with an extension .vdp. In most of the
cases the file created is vcdplus.vdp. To view this file in
graphical representation use the
command
[mallik@oberon verilog] ./simv
[mallik@oberon verilog]dve vpd vcdplus.vpd
Above command invokes a new interface called DVE (Discovery
Visual Environment).
Right click on the name of the module in the box and select add
to waveform which shows
the simulation results in the form of a waveform. DVE will be
discussed in depth later in the
document.
Note: To get vcdplus.vpd file in the current working directory,
user should include $vcdpluson();
in testbench inside the initial block.
Entire process of simulation and all the above four steps will
be discussed in detail with an
example in the form of a tutorial. VCS takes a set of Verilog
files as input and produces an
executable simulator as an output. VCS is capable of compiling
both behavioral Verilog models
and RTL Verilog models. Behavioral models are often not
synthesizable, so any hardware we
intend to synthesize will need to be written at the register
transfer level.
-
7/31/2019 Kande Project 1
27/110
17
VII. Compilation and simulation of a digital design1. Once user
enters into the oberon server and then into the working directory
(verilog),
compilation and simulation can be done in the following way.
[mallik@oberon ~] cd verilog
[mallik@oberon verilog] vcsPP ram_iitk.v ram_iitk_tb.v
Parsing design file 'ram_iitk.v'Parsing design file
'ram_iitk_tb.v'Top Level Modules:testTimeScale is 1 ns / 100
psStarting vcs inline pass...1 module and 0 UDP read.
However, due to incremental compilation, no re-compilation
isnecessary.ld -r -m elf_i386 -o pre_vcsobj_1_1.o --whole-archive
pre_vcsobj_1_1.a --no-whole-archiveif [ -x ../simv ]; then chmod -x
../simv; fi
g++ -o ../simv -melf_i386 -m32 SIM_l.o 5NrI_d.o
5NrIB_d.opre_vcsobj_1_1.o
rmapats_mop.ormapats.o/usr/local/synopsys/linux/lib/libvirsim.so/usr/local/synopsys/linux/lib/librterrorinf.so/usr/local/synopsys/linux/lib/libsnpsmalloc.so/usr/local/synopsys/linux/lib/libvcsnew.so/usr/local/synopsys/linux/lib/vcs_save_restore_new.o/usr/local/synopsys/linux/lib/ctype-stubs_32.a
-ldl -lm -lc -lpthread -ldl../simv up to dateCPU time: .048 seconds
to compile + .024 seconds to elab + .180 seconds tolink
After compilation is done an executable file simv is generated
by VCS as shown in figure 5. And
accessing this simv will give simulation results.VCS compiles
the code based on any change inthe module or in the inputs. If
there is no change in the design from the time of previous
compilation VCS gives a message as shown below;
The design hasn't changed and need not be recompiled.If you
really want to, delete the file simv.daidir/.vcs.timestamp and run
VCSagain.
If there is change in only few modules, only those modules will
be recompiled as shown below;
TimeScale is 1 ns / 100 psStarting vcs inline pass...
1 module and 0 UDP read.recompiling module test because:This
module or some inlined child module(s) has/have been modified.
if [ -x ../simv ]; then chmod -x ../simv; fig++ -o ../simv
-melf_i386 -m32 _vcsobj_1_1.o 5NrI_d.o
5NrIB_d.oSIM_l.ormapats_mop.ormapats.o/usr/local/synopsys/linux/lib/libvirsim.so/usr/local/synopsys/linux/lib/librterrorinf.so/usr/local/synopsys/linux/lib/libsnpsmalloc.so/usr/local/synopsys/linux/lib/libvcsnew.so
-
7/31/2019 Kande Project 1
28/110
18
/usr/local/synopsys/linux/lib/vcs_save_restore_new.o/usr/local/synopsys/linux/lib/ctype-stubs_32.a
-ldl -lm -lc -lpthread -ldl../simv up to dateCPU time: .092 seconds
to compile + .020 seconds to elab + .180 seconds tolink
2. Once the compilation phase is completed, to view simulation
results we need to access simvfolder at terminal so that it gives
all the simulation results according to the time specified in
testbench.[mallik@oberon verilog] ./simv
Beginning Simulation...Pattern# 0 time 1950: WE=0; Address=0;
Data=00; Expected Q=xx; Actual Q=xxPattern# 1 time 2950: WE=1;
Address=0; Data=01; Expected Q=01; Actual Q=01Pattern# 2 time 3950:
WE=1; Address=1; Data=02; Expected Q=02; Actual Q=02Pattern# 3 time
4950: WE=1; Address=2; Data=04; Expected Q=04; Actual Q=04Pattern#
4 time 5950: WE=1; Address=3; Data=08; Expected Q=08; Actual
Q=08Pattern# 5 time 6950: WE=1; Address=4; Data=10; Expected Q=10;
Actual Q=10Pattern# 6 time 7950: WE=1; Address=5; Data=20; Expected
Q=20; Actual Q=20Pattern# 7 time 8950: WE=1; Address=6; Data=40;
Expected Q=40; Actual Q=40Pattern# 8 time 9950: WE=1; Address=7;
Data=80; Expected Q=80; Actual Q=80
Pattern# 9 time 10950: WE=0; Address=0; Data=07; Expected Q=01;
Actual Q=01Pattern# 10 time 11950: WE=0; Address=1; Data=08;
Expected Q=02; Actual Q=02Pattern# 11 time 12950: WE=0; Address=2;
Data=09; Expected Q=04; Actual Q=04Pattern# 12 time 13950: WE=0;
Address=3; Data=10; Expected Q=08; Actual Q=08Pattern# 13 time
14950: WE=0; Address=4; Data=11; Expected Q=10; Actual Q=10Pattern#
14 time 15950: WE=0; Address=5; Data=12; Expected Q=20; Actual
Q=20Pattern# 15 time 16950: WE=0; Address=6; Data=13; Expected
Q=40; Actual Q=40Pattern# 16 time 17950: WE=0; Address=7; Data=14;
Expected Q=80; Actual Q=80Pattern# 17 time 18950: WE=1; Address=0;
Data=aa; Expected Q=aa; Actual Q=aaPattern# 18 time 19950: WE=0;
Address=0; Data=55; Expected Q=aa; Actual Q=aaPattern# 19 time
20950: WE=1; Address=0; Data=55; Expected Q=55; Actual Q=55Pattern#
20 time 21950: WE=0; Address=0; Data=aa; Expected Q=55; Actual
Q=55
Good! End of Good Simulation.$finish called from file
"ram_iitk_tb.v", line 94.$finish at simulation time 229500
V C S S i m u l a t i o n R e p o r t
Time: 22950000 psCPU Time: 0.480 seconds; Data structure size:
0.0MbWed Feb 29 09:44:39 2012
As mentioned earlier simulation results are according to
testbench. Programs for ram ram_iitk.vand its testbench
ram_iitk_tb.vare given later in the document (Appendix A).
VIII. DVE (Discovery Visual Environment) procedureNext step in
this process is to debug the simulated design graphically. To
fulfill this purposeDVE (Discovery Visual Environment) is used. DVE
is a Graphical User Interface (GUI) for
debugging Verilog, VHDL, SystemVerilog, and System C digital
designs. DVE is invoked from
VCS. A dump file vcdplus.vpd is given as input to DVE; this dump
file has information
regarding simulation. Dump file is created upon introducing
$vcspluson(); in the testbench of thedesign after declaration of
initial block. This dump file is given as input to dve in the
following
way.
[mallik@oberon verilog] dve vpd vcdplus.vpd
-
7/31/2019 Kande Project 1
29/110
19
Figure 7 gives an outline of DVE and gives information regarding
all the possible views. Once
DVE is invoked, it displays current program and its test bench
in the hierarchy panel and one cancontinue debugging by following
steps mentioned in the coming sections.
Figure 7: DVE and its brief description
1. Hierarchy pane: List of all the designs modules and its
testbench.2. Variable/data pane: List of all the variables that can
be viewed in GUI is listed.3. Console pane: When user double clicks
on a module in hierarchy pane, the code
associated with that model is displayed for debugging.
4. Tool bar: Tool bar consists of various tools that will be
highlighted according to the panein which user is operating.
5. This portion of the DVE can be used for graphing signals or
for viewing drivers of targetsignal. The wave view can be found in
later figures regarding DVE.
6. History/Log pane: User can find list of previously used
commands and can save session ifrequired.
DVE can be invoked in two different modes, post-processing mode
and interactive mode. This
project deals with post-processing mode. As mentioned earlier in
this post processing mode a
dump file is created from simulation and this dump file
(vcdplus.vpd) is given as input to DVE.
1 2
3
4
56
-
7/31/2019 Kande Project 1
30/110
20
A view can have multiple instances per TopLevel window. Examples
of views are Source,
Wave, List, Memory, and Schematic. Panes can be docked on any
side to a Top Level window orleft floating in the area of a frame
not occupied by docked panes(called the workspace) [2].
To invoke dve in post-processing mode one should give the
following command at unix prompt
after simulation phase.
[mallik@oberon verilog] dve vpd vcdplus.vpd
-vpdin the above command specifies the file format that is being
fed to dve. An example to theabove process regarding ram is shown
in figure 8.
Figure 8: Complete GUI view of RAM through DVE
-
7/31/2019 Kande Project 1
31/110
21
To view wave form, right click on the name of the module and
select add to waveforms new
waveform. This invokes a wave view to existing DVE as shown in
figure 9.
Figure 9: Showing RAM with waveform viewOnce we have this view,
all the possible ways to debug the design are discussed in the
followingssections of document.
8.1 Search for signals or scopes: Noteworthy process in
debugging is to find the signal andits occurrence in the design.
Selecting edit > search for signals/instances pops up awindow as
shown in figure 10. User can search for signals/variables, scopes,
and modules
accessing figure 10. For instance, here a signal named clockis
searched in the design, sosignals/variables is selected. Observe
figure 11 where name of the scope is given and soscope is selected.
Upon clicking search all the occurrences of the target signal
are
displayed.
-
7/31/2019 Kande Project 1
32/110
22
Figure 10: Debugging the design by analyzing search options
Figure 11: Debugging the design by analyzing search options
Apart from this way, we can drag and drop the signal from the
console pane to search
shown in figure 12.
-
7/31/2019 Kande Project 1
33/110
23
Figure 12: Alternate way of searching the signal
Searching signal using figure 12 takes it to the first
occurrence of that signal in thesource code. Another handy feature
is to check/uncheck the box at right corner of
console. This will enable or disable to open in new views. If
the box is checked, there
wont be multiple views on the screen, new view is just updated
on the current screenand vice versa. Refer to figure 13 for
details.
Figure 13: Figure 9.4: Importance of check box
8.2 Finding values on the signal: This feature of DVE is useful
in locating values on thesignal or occurrence of values on the
signal. User has various options to do this step; all
the options are shown in figure 14.
Figure 14: Available options in finding values on the signal
From above figure if any edge, rising, and falling is selected,
in the wave windowoccurrence of correspond edges is displayed and
one can navigate among the occurrencesusing the circled option in
the figure 14. If a particular value is to be searched then we
have to select value from the drop down menu and enter the
target value. Figure 15
shows the scenario when it detects the target, it is represented
with a vertical line across
the signal.
-
7/31/2019 Kande Project 1
34/110
24
Figure 15: searching for value on the signal Q [7:0] in a
RAM
This particular function is to ease users debugging. It includes
moving wave window to
top level or to bottom level, setting name to GUI. Refer to
figures 16 and 17 for details.
When user is working with several DVE windows it is difficult to
decide the desiredwindow, so giving name to each window will reduce
the efforts of user. Window>moveto> new toplevel. To select a
new title for the window;Window>set top level title.
Figure 16: Moving wave window to the top level
Figure 17: Setting the top level name
-
7/31/2019 Kande Project 1
35/110
25
8.3 Debugging state machines using wave window: While dealing
with state machines, itmight become difficult to deal with number.
There is a powerful and important toolprovided by DVE, to set names
of states and signal shows exact name of the state as in
figure 18. Right click on the target signal and select set radix
> state name to set name tothe state as defined in
testbench.
Figure 18: Setting name to state machine signal
Figure 19: Result of setting state names
8.4 Set an expression / create new signal: This feature of DVE
allows user to debug bysetting a new expression in the design with
actually making any changes to source code.
This is an innovative feature and solves numerous glitches at
its root level. Figure 20 give
complete details of how to set an expression.Right click on the
signal > set expression.In figure 21 user wants to create a
signal which goes to 1 (high)when signal is read but
not right in equation terms; reading phase = !WE&RE; and the
wave view isupdated with a new signal as shown in fig 20. As
highlighted with a dotted rectangle in
figure 21, user has various logical and combinational logic
operators to set an expression.
Figure 20: Showing wave window with new signal updates
-
7/31/2019 Kande Project 1
36/110
26
Figure 21: setting expression to identify reading phase
Grid: Signal grid is another problem solver. User can grid
signals and enable the grid count to
debug the design. This process is illustrated in figure 22. In
order to enable grid on a signal,select a signal, click on grid and
a new grid window opens up as shown in figure 22. Next
immediate step in starting the grid process is to clickget
selected signal(s) as highlighted in thefigure. Next check the
boxes enable grid count ,and show grid. User has an option to
select therange (from time A to time B) of signal to be grid. Refer
to figure 23 to see the grid properties.
Figure 22 and 23 shows different signals just for convenience.
Viewers are not to be confused by
the signals used in both the figures. The Grid Properties window
lets you have even more controlover the grid. For example you can
set its cycle time to a custom value. This could be very
useful if you want to be able to visually inspect drifting
clocks or duty-cycle issues, etc [7] refer
to figure 24.
-
7/31/2019 Kande Project 1
37/110
27
Figure 22: Available options to grid a signal
Figure 23: picture showing grid on rand signal of a module for
convenience
Figure 24: Grid properties [7]
-
7/31/2019 Kande Project 1
38/110
28
8.5 Tracing drivers and loads: Tracing drivers plays vital role
in debugging and is a veryimportant feature presented by DVE.
Tracing option enables user to view drivers/loadsthat contribute to
change in the value of a signal. When a driver is traced, a new
Driver
pane will be created if none exists in the current top level
frame. If a driver pane exists,
the driver information will be added to the top of the list.
Furthermore DVE highlights
the occurrence of first driver/load in the console pane. To do
this we can follow 4different ways which are listed in the
document.
a. Right click on the signal and select trace loads/driversb.
Directly double clicking the signalc. Using options from tool bar
as showing in figure 26d. Trace >drivers/loads
Figure 255: trace drivers by right click on the
signals
Figure 266: Trace drivers by clicking on tool bar
Figure 27 shows tracing of drivers for signal randin the design.
The drivers pane on theright shows the occurrence of the drivers,
and it reads V1:mainpr. This mean the signalrand is found in the
main program of source code (not the rest bench) and is
highlighted
in the hierarchy pane.
Figure 27: DVE showing drivers of rand signal
Figure 27 shows all the possible mentions of rand signal
occurrences except for theoccurrence in the console pane.
Occurrence of rand signal in console pane is shown infigure 28.
-
7/31/2019 Kande Project 1
39/110
29
Figure 28: Point drivers ofrandin console pane
DVE when ran in interactive mode, many other debugging features
come into practice.
a. Execute UCLI/Tcl commandsb. Set line, time, or event break
pointsc. Line steppingd. Using interactive rewind feature
(extremely useful)e. View annotations reflecting the actual value
(powerful debug tool)
Verilog code for RAM design: ram_iitk.v. Refer to appendix
AVerilog testbench for RAM: ram_iitk_tb.v Refer to appendix A
Next stage to compilation, simulation, and debugging is
synthesis. At this stage, design compiler
(dc_shell in short) accepts totally simulated and verified
design along with standard cell library
as input and initiates the process of synthesis.
-
7/31/2019 Kande Project 1
40/110
30
IX. Design Compiler9.1 Introduction
Design compiler is a logic synthesis tool provided by Synopsys.
The process of translating RTL
design into a gate-level design is called synthesis.RTL
synthesis is an automated design task in
which high-level design descriptions written in Hardware
Description Languages (such as
VHDL, Verilog, or SystemVerilog) are transformed into gate-level
netlist that is technology
dependent. Gate-level netlist is fundamentally an implementation
of the current design using
library modules (pre-defined gates in the standard cell
(technology) library) and their
interconnections. Complete picture of design compiler is shown
in figure 29. The synthesis tool
(dc compiler) follows several steps in achieving the end product
(gate-level netlist) which are
outlined in figure 30. Each of these steps will be discussed in
detail in the following sections.
9.2 Specify and link Target technology: At this stage user
specifies various technology libraryfiles and their locations. To
synthesize a design, user needs technology library that will
contain description of the cells from the manufacturer, and
their timing. This is usually a .dbfile found in library
installation directory [8]. To synthesize a design we need to
follow the
process as given below
i. Specify search path to acquire .db file by search_pathii.
Specify technology library that user wants his/her design to be
mapped to.
settarget_libraryiii. Specify link libraries, this is an
optional .db files which are pre synthesized and
ready to be read in.setlink_library
iv. Specify symbol library: Symbol libraries contain definitions
of the graphicsymbols that represent library cells in the design
schematics. Semiconductor
vendors maintain and distribute the symbol libraries. Design
Compiler usessymbol libraries to generate the design schematic
[9].Set symbol_library
The entire process is done in our case by setup file
.synopsys_dc.setup which isusually found in either synopsys root
directory or in users home directory. Fragment of
setup file is displayed below.
# Search Pathsetsearch_path "$search_path ./libs ./source ./db
./"
# Setup libraries
setlink_library "* core_typ.db"settarget_library
"core_typ.db"setsymbol_library "core.sdb"
9.3 Analyze and Elaborate phase: Synthesis is a complex task
consisting of many phases andrequires various inputs in order to
produce a functionally correct netlist [8]. At this step the
HDL design is read into design compiler for synthesis.
-
7/31/2019 Kande Project 1
41/110
31
Overview of Design compiler
Figure 29: Design compiler process
-
7/31/2019 Kande Project 1
42/110
32
Figure 30: Design Compiler and its internal process
This is done in two steps analyze and elaborate. In analyze
phase, the source design is
read and checked for any syntax errors, if found should be
rectified before proceeding to
elaborate phase. Creates HDL library objects in an
HDL-independent intermediate
Verilog
design (RTL)
Library Files
Design
Compiler
Analyze and
Elaborate
Phase
Apply
Constraints
Specify and link
Target technology
Uniquify
Mapping and
Optimization
Compile
Gate-levelNetlist
StandardDelay Format
DesignConstraints file
-
7/31/2019 Kande Project 1
43/110
33
format and saves these intermediate files in a specified
location
home/verilog/work
Once an analysis is completed we proceed to elaborate phase.
During elaborate phase:i. Design Compiler translates the design
into a technology-independent design
(GTECH) from the intermediate files produced during analysis
ii. Replaces the HDL arithmetic operators in code with
technology librarycomponentsiii. Links the design automatically to
all the essential referencesiv. Allows changing of parameter values
(generics) defined in the source codemoduleRamChip (Address, Data,
CS, WE, OE);parameterAddressSize = 1;parameterWordSize = 1;input
[AddressSize-1:0] Address;inout [WordSize-1:0] Data;input CS, WE,
OE;
reg [WordSize-1:0] Mem [0:1
-
7/31/2019 Kande Project 1
44/110
34
technology library. The cell and wire delays are scaled
according to these
conditions.ii. Modeling wire loads: Wire load models are used to
estimate the effect of
interconnect nets on capacitance, resistance, and area before
real data is obtained
from the actual layout. These models are statistical models and
they estimate the
wire length as a function of net's fanout [10].9.6 Optimizing
the design: At this particular point of time, Design Compiler maps
the HDLsource code with cells available in the technology library.
After the mapping is completed
it translates the HDL into gate-level netlist. Optimization is
done in several phases.According to the constraints specified
during synthesis, different optimization procedures
are applied. Optimization is done on three different levels.
9.6.1 Architectural Level: High-level optimization on HDL design
modules correspondsto architectural level. Some of the tasks
included in architectural level are:
a.Arithmetic Optimization: Design Compiler rearranges the
operations inarithmetic expressions according to constraints
applied, to minimize
timing or the area of gate-level design. These rearrangements
are
performed to improve implementation of the design and are based
on rulesof algebra.
b.Resource Sharing: Resource Sharing is done for better area
constraint(minimum area). Resource sharing refers to sharing of
single hardware
resource with multiple hardware operators in GTECH (generic
technology-independent netlist). Nonexistence of resource
sharing resultsin repeated hardware of similar functionality and
also in the increase of
area.
c. Selecting DesignWare Implementation: Selecting a
DesignWareimplementation means that the implementation selection of
a particularresource is left to the Design Compiler. For example,
the Basic IP Library
contains two implementations (ripple and carry-lookahead) for
the +
operator (the DesignWare Foundation Library provides more
implementations for the '+' and other operators). When
selectingDesignWare implementation, Design Compiler considers all
available
implementations and makes it selection according to your
constraints [10].
9.6.2 Logic Level Optimizations: In the synthesis process HDL
design is now a GTECHnetlist. As a part of Logic level
optimizations on the design, structuring andflattening of the
design is implemented.
a. Structuring: Structuring evaluates the design equations
represented by theGTECH netlist and tries by using Boolean algebra
to factor out common
sub-expressions in these equations. The sub-expressions that
have been
identified and factored out can then be shared between the
equations [10].
Structuring can be set for timing(default) or Boolean
optimization. Thelater helps in reducing area, but has a greater
impact on timing. Thus
circuits that are timing sensitive should not be structured for
Boolean
optimization.
-
7/31/2019 Kande Project 1
45/110
35
Table 7: Logic level optimization showing structuring [2]
Before structuring After structuring
P = ax + ay + cQ = x + y + z
I = x + y
P = aI + cQ = I + z
b.Flattening: Conversion of logic into two level sum-of-products
form iscalled Flattening. Flattening produces fast logic (by
minimizing the levels
of logic between the inputs and outputs) at the expense of the
area increase
[10]. In general one should compile the design using default
settings(flatten and structure are set as false). If timing
objectives are not met
flattening and structuring should be employed. Flattening of a
design is
recommended if and only if the design contains unstructured or
random
logic.9.6.3 Gate level Optimizations: Conversion of
technology-independent netlist into
technology-dependent netlist is known as Gate level
optimizations. This
conversion is done by mapping cells in technology-independent
netlist to standard
library cells. Several gate-level optimizations in the synthesis
process are listedbelow:
a.Mapping: The term Mapping is self-explanatory. The above
discussedmapping which aids in conversion is done at this
particular stage.
b.Delay Optimization: After mapping to cells in standard
technology librarythere is a possibility of timing violations. This
timing violations is fixed by
delay optimization.c.Design rule fixing: Design Compiler inserts
buffers or resizes existing
cells in order to fix design rule violations. In this process of
fixing design
rules timing constraints can be violated (as discussed in stage
3).
d.Area Optimization: Area optimization is the last step that
Design Compilerperforms on the design. During this phase, only
those optimizations thatdon't break design rules or timing
constraints are allowed [10].
All the optimizations performed depend on constraints specified
by user. As a
matter of this reason, setting realistic constraints is
mandatory in the process of
synthesis.
9.7 Analysis of the results: Analyzing the results is as
important as all the above steps insynthesis process. User can
choose to use Design Vision (GUI of Design compiler) toanalyze the
results. Design analysis can be done using two methods:
9.7.1 Generating textual reports for design properties: This
step includes invokingseveral commands at terminal to generate
reports for vital design objects namely
timing and area, cells, clocks, ports, buses, pins, nets,
hierarchy, resources,
constraints in the design.9.7.2 Visualizing design objects
(GUI): Viewing schematic, symbol view, hierarchy
view, and viewing other graphical properties can be performed at
this stage.Analysis is done to examine and confirm that the user
specified constraints is met during
the synthesis process and if needed re-synthesis is done.
9.8 Saving design: Saving design in several useful formats
should be done to convey thespecified constraints during the
synthesis process, to successive stages of ASIC
implementation flow (figure 1).
-
7/31/2019 Kande Project 1
46/110
36
X.Design Compiler tutorial:First and foremost process is to
invoke design compiler. In order to do this, user has to be in
working directory (verilog, in this case, refer to figure
6).
[mallik@oberon verilog] dc_shell
10.1 After invoking the Design Compiler (will be referred as
dc_shell ), linking the targetlibrary and source library is done.
and the process of analyze and elaborate is to beperformed. Refer
to previous section for more details on analyze and elaborate:
dc_shell> set
link_librarysaed90nm_max.dbsaed90nm_max.dbdc_shell> set
target_librarysaed90nm_max.dbsaednm90nm_max.db
10.2 The next stage is to read the design. This can be done in
two ways. If the design is in.ddc format we can directly perform
analyze and elaborate in a single step with the
help ofread_ddc. For designs in verilog the process ofanalyze
and elaborate is to beperformed. Refer to previous section for more
details on analyze and elaborateFormat for both analyze and
elaborate:
dc_shell>analyze -format -lib \
dc_shell>elaborate -arch -lib param
Correspondingly commands applied on ram_iitk.v whose module name
is reg_sram isgiven below:
dc_shell> analyze -format verilog -lib work ram_iitk.vRunning
PRESTO HDLCSearching for ./ram_iitk.vSearching for
/usr/local/synopsys/libraries/syn/ram_iitk.vSearching for
/usr/local/synopsys/dw/syn_ver/ram_iitk.vSearching for
/usr/local/synopsys/dw/sim_ver/ram_iitk.vSearching for
./libs/ram_iitk.vSearching for ./source/ram_iitk.vCompiling source
file ./source/ram_iitk.vWarning: ./source/ram_iitk.v:24:
Intraassignment delays for blockingassignments are ignored.
(VER-129)Warning: ./source/ram_iitk.v:32: Intraassignment delays
for blockingassignments are ignored. (VER-129)Presto compilation
completed successfully.
Loading db file '/home/mallik/verilog/libs/saed90nm_max.db'1
Success message is indicated by binary notation, 1 for success
and 0 for failure.
In the elaborate command, name of the module is reg_sram and
format of thearchitecture is verilog:
-
7/31/2019 Kande Project 1
47/110
37
dc_shell> elaborate -arch verilog -lib work reg_sramRunning
PRESTO HDLC
Inferred memory devices in processin routine reg_sram line 17 in
file'./source/ram_iitk.v'.===============================================================================
| Register Name | Type | Width | Bus | MB | AR | AS | SR | SS |
ST
|===============================================================================|
mem_data_reg | Flip-flop | 8 | Y | N | N | N | N | N | N ||
mem_data_reg | Flip-flop | 8 | Y | N | N | N | N | N | N ||
mem_data_reg | Flip-flop | 8 | Y | N | N | N | N | N | N ||
mem_data_reg | Flip-flop | 8 | Y | N | N | N | N | N | N ||
mem_data_reg | Flip-flop | 8 | Y | N | N | N | N | N | N ||
mem_data_reg | Flip-flop | 8 | Y | N | N | N | N | N | N ||
mem_data_reg | Flip-flop | 8 | Y | N | N | N | N | N | N ||
mem_data_reg | Flip-flop | 8 | Y | N | N | N | N | N | N
|===============================================================================Statistics
for
MUX_OPs===========================================================|
block name/line | Inputs | Outputs | # sel inputs | MB
|===========================================================
| reg_sram/20 | 8 | 8 | 3 | N
|===========================================================Presto
compilation completed successfully.Elaborated 1 design.Current
design is now 'reg_sram'.1
This information tells you the Design Compiler decided to infer
memory type (flip-flop
or latch) as flip-flop, the number of bits (8), whether it uses
an asynchronous set/reset
(AS, AR) or synchronous set/reset (SS, SR) and some other
information. Verifying theseresults would give user accuracy.
10.3 To ensure that we are optimizing top_level design, we use
current_design. At this stageuser sets module of interest as
current module:
dc_shell>current_designCurrent design is
'reg_sram'.{reg_sram}
10.4 At this stage user verifies that the design compiler is
able to read all modules regardingsource design (link). Command
uniquify instantiates all defined modules as aseparate modules. If
a module is instantiated more than one time, this command will
make separate modules for each instance. This allows each to be
optimized independentlyfor their particular usage [11]:
dc_shell> linkLinking design 'reg_sram'
Using the following designs and
libraries:-------------------------------------------------------------saed90nm_max
(library) /home/mallik/verilog/libs/saed90nm_max.db
1dc_shell>uniquify // check the design for errors such as
//missing module definitions1
-
7/31/2019 Kande Project 1
48/110
38
10.5 Following above process design is read into the Design
Compilers memory. The designis analyzed for the syntactical errors
and non-synthesizable structures and prepared forsynthesis by
analyze and elaborate commands. Designs consistency never came as a
point
of interest but at this stage user needs to check the design
consistency and internal
representation of the design so ru