Embed Size (px)
Citation preview
U+S Ausschuss der See-BG Stand: Mai 2003 Richtlinien für die Überwachung der Schiffsstabilität Kapitel 2: Stabilität und Rollbewegungen im Seegang
Seite 1 von 28
Kapitel 2 Stabilität und Rollbewegungen im Seegang
2.1 Mögliche Einwirkungen des Seegangs auf die Stabilität
Das Stabilitätsmoment des Schiffes ist das Produkt aus Hebelarm und Gewichtskraft. In glat-tem Wasser hängt die Stabilität bei einem gegebenen Beladungszustand nur vom Nei-gungswinkel ab, weil sich mit diesem der Hebelarm ändert, während die Gewichtskraft keiner Veränderung unterworfen ist. Dies ist die Glattwasserstabilität. Im Seegang unterliegt die Gewichtskraft wegen der dort auftretenden Beschleunigungen periodischen Veränderungen. Solche Veränderungen der Gewichtskraft sind begrenzt und haben keinen großen Einfluss auf die wirksame Stabilität.
Von wesentlicher Bedeutung für die Stabilität im Seegang sind mögliche Änderungen der Hebelarme. Diese können auftreten, wenn in längslaufendem Seegang die Verteilung des Auftriebs über die Schifflänge stark von der in glattem Wasser gegebenen Auftriebsvertei-lung abweicht (siehe 2.3).
2.2 Stabilität in quereinkommender See
Die wechselnde Wellenschräge besteht über die ganze Schiffslänge hinweg in gleicher Wei-se und verursacht nur eine Veränderung des Neigungswinkels. Die bei den wirksamen Nei-gungswinkeln entstehenden Hebelarme sind gleich denen in glattem Wasser. Abgesehen von geringen dynamischen Einflüssen bleibt die Glattwasserstabilität erhalten.
2.3 Stabilität in längslaufender See
In längslaufender See unterliegt die Auftriebsverteilung in Schiffslängsrichtung und der ent-sprechende wirksame Hebelarm periodischen Schwankungen.
Dies wird bei Handelsschiffen herkömmlicher Bauart verursacht durch:
– Entlangziehen von Wellenbergen am Schiffsrumpf und
– periodische Trimmänderungen beim Stampfen.
Beide Ursachen treten meistens gleichzeitig auf. Zum besseren Verständnis werden sie nachstehend getrennt beschrieben.
2.3.1 Entlangziehen von Wellenbergen am Schiffsrumpf
Wenn die Wellenlänge die Größenordnung der Schiffslänge hat (ca. 0,7 ⋅ Lpp bis ca. 1,4 ⋅ Lpp) und die Wellenhöhe ausreichend groß ist, hängt die Größe der wirksamen Hebelarme von der jeweiligen Position des Wellenberges am Schiffsrumpf ab. Das ergibt sich aus der Auf-triebsverteilung bei Handelsschiffen üblicher Bauart, besonders bei modernen Schiffsformen mit großer Decksladekapazität. Die hinteren und vorderen Teile des Schiffsrumpfes tragen wegen ihrer ausfallenden Spanten und etwa dort angeordneter Aufbauten (Back und Poop) wesentlich zum Entstehen der Hebelarme bei.
Wenn der Wellenberg den mittleren Teil der Schiffslänge durchläuft, tauchen die Schiffsen-den zu den Wellentälern hin aus. Die Hebelarme sind dann kleiner mit einem Minimum bei Position des Wellenberges etwa beim Hauptspant (Wellenberglage). Wenn der Wellenberg

U+S Ausschuss der See-BG Stand: Mai 2003 Richtlinien für die Überwachung der Schiffsstabilität Kapitel 2: Stabilität und Rollbewegungen im Seegang
Seite 2 von 28
zum Ende des Schiffes läuft und der nachfolgende Wellenberg sich dem anderen Ende des Schiffes nähert, tauchen die Schiffsenden deutlich tiefer ein als in ruhigem Wasser. Die He-belarme sind dann größer mit einem Maximum bei Lage des Hauptspants etwa im Wellental (Wellentallage).
1,2
1,0
0,8
0,6
0,4
0,2
0,00° 10° 20° 30° 40° 50° 60° 70° 80°
Neigungswinkel φ
Wellenberg
Wellental
Glattwasser
Heb
elar
m G
Z [
m]
Bild 2.1: Hebelarmkurven auf dem Wellenberg, im Wellental und in Glattwasser. Wel-lenlänge gleich Schiffslänge, Wellenhöhe 9 m. Mehrzweckfrachter mit langer Back und Poop. Lpp = 135 m, Tiefgang 8,20 m (abgeladen), GMC in Glattwas-ser = 1,50 m.
Grundsätzlich wächst die Größe der Schwankung der Hebelarme mit der Schiffsgröße an, solange das Größenverhältnis zwischen Schiff und Wellen ähnlich bleibt (Maßstabseffekt). Dies gilt für Schiffe aller Größen.
Trotzdem wird gerade auch bei kleinen Schiffen die Schwankung der Hebelarme durch steile am Rumpf entlangziehende Wellen gefährlich groß. Die Hebelarme von kleinen Schiffen mit geringem Freibord hängen bei größeren Neigungen vom Zuwasserkommen der Back und der Poop ab, besonders weil das Volumen dieser Aufbauten im Verhältnis zum gesamten Verdrängungsvolumen groß ist. Tauchen Back und Poop in der Wellenberglage aus, redu-zieren sich bei großen Neigungswinkeln die Hebelarme eines kleinen Schiffes erheblich.
Außerdem kommen besonders steile Wellen von der Größenordnung des Schiffes für kleine-re Schiffe häufiger vor als für größere Schiffe.

U+S Ausschuss der See-BG Stand: Mai 2003 Richtlinien für die Überwachung der Schiffsstabilität Kapitel 2: Stabilität und Rollbewegungen im Seegang
Seite 3 von 28
2.3.2 Periodische Trimmänderungen beim Stampfen
Heftige Stampfbewegungen in von vorn einkommendem Seegang führen durch die damit verbundenen Trimmänderungen zu einem periodischen Schwanken der Hebelarme. Dies gilt ganz besonders für Containerschiffe, Fahrgastschiffe und Ro-Ro-Schiffe mit scharf geschnit-tenem Vorschiff und ausgeprägtem Spiegelheck, also mit großem Unterschied der Spant-formen in Vor- und Hinterschiff.
Beim Eintauchen des Bugs taucht das Spiegelheck aus und kommt daher beim Rollen des Schiffes erst spät oder überhaupt nicht zu Wasser (vorlastiger Trimm). Die Hebelarme sind dadurch kleiner und erreichen ein Minimum bevor die zur Back hin ausfallenden Spanten in der nächsten heranlaufenden Welle eintauchen und dadurch die Stabilität wieder verbes-sern.
Beim Eintauchen des Spiegelhecks (hecklastiger Trimm), sind die Hebelarme größer mit einem Maximum etwa im hinteren Umkehrpunkt der Stampfbewegung.
Grundsätzlich trägt ein flaches, ausladendes Spiegelheck dazu bei, dass die Hebelarm-schwankungen beim Stampfen groß werden und dadurch parametrisches Rollen in vorlicher See auftreten kann. Infolge des Maßstabseffekts ist das bei großen Schiffen wahrscheinli-cher. Für kleine Schiffe mit ausladendem Spiegelheck besteht die Möglichkeit des parametri-schen Rollens besonders dann, wenn sie für eine im Verhältnis zur Schiffsgröße hohe Ge-schwindigkeit gebaut sind.
2.3.3 Unterschiede zwischen achterlicher See und von vorn einkommender See
In achterlicher See überwiegt deutlich die Wirkung der am Schiffsrumpf entlangzie-henden Wellenberge.
In von vorn einkommender See kann bei großen Schiffen die Trimmänderung beim Stampfen auch dann zu einer deutlichen Veränderung der Hebelarme führen, wenn der Seegang im Verhältnis zur Schiffsgröße für eine gefährliche Wirkung der Wellenberge noch zu gering ist.
2.4 Gefahren durch Verlust der Stabilität auf dem Wellenberg
In hohen Wellen, deren Länge die Größenordnung der Schiffslänge erreicht, kann auch bei üblichen Beladungszuständen die Stabilität in der Wellenberglage sehr stark abgebaut wer-den (siehe Bild 2.1). Dadurch kann schon von kleineren Neigungswinkeln an kein aufrichten-der Hebelarm mehr vorhanden sein. In achterlicher See bleibt der Wellenberg bei zu hoher Schiffsgeschwindigkeit lange in der Nähe des Hauptspants. Dieser Zustand muss vermieden werden, weil das Schiff während dieser Zeitspanne fast ohne Stabilität fahren würde. Dabei könnte es plötzlich kentern, ohne dass sich dies durch vorhergehende große Rollbewegun-gen ankündigt.

U+S Ausschuss der See-BG Stand: Mai 2003 Richtlinien für die Überwachung der Schiffsstabilität Kapitel 2: Stabilität und Rollbewegungen im Seegang
Seite 4 von 28
2.5 Resonanz
2.5.1 Die Wirkung der Resonanz
Das Schiff wird als schwingungsfähiges System immer dann zu großen Rollbewegungen angeregt, wenn ihm wiederholt zum richtigen Zeitpunkt Energie aus dem Seegang zugeführt wird.
Dies ist gegeben bei bestimmten Verhältnissen zwischen der Rollzeit des Schiffes (TR) ei-nerseits und der Begegnungsperiode zwischen Schiff und Wellen (TB) andererseits.
Die regelmäßig zugeführte Energie wird beim Rollen des Schiffes jedes Mal in zusätzlichen Drehschwung beim Durchschwingen durch die aufrechte Lage umgewandelt. Dadurch ver-größern sich die Rollwinkel.
Von praktischer Bedeutung für die Schiffsführung sind zwei Verhältnisse zwischen Rollzeit und Begegnungsperiode:
- Die Begegnungsperiode ist etwa gleich der Rollzeit (TB etwa gleich TR). Dies wird als Periodenverhältnis 1 bezeichnet; siehe dazu 2.6 und 2.7.2.
- Die Begegnungsperiode ist etwa halb so groß wie die Rollzeit (TB etwa gleich 0,5·TR). Dies wird hier als Periodenverhältnis 0,5 bezeichnet; siehe dazu 2.7.2.
Eine mögliche Gefährdung durch Resonanz kann man nur dann vorhersehen und vermei-den, wenn man sowohl die Begegnungsperiode als auch die Rollzeit des Schiffes kennt.
2.5.2 Die Begegnungsperiode
Die Begegnungsperiode ist die Zeitspanne zwischen dem Eintreffen zweier aufeinanderfol-gender Wellenberge an der gleichen Stelle des Schiffes. Die Begegnungsperiode wird beein-flusst durch die Wellenperiode TW, den Kurs des Schiffes relativ zur Seegangsrichtung und die Schiffsgeschwindigkeit.
Die Begegnungsperiode kann berechnet werden als
[ ]s5140vTk
TkT
W
2W
B β⋅⋅+⋅⋅
=cos,
.
Hierin sind:
TB: Begegnungsperiode in s.
k: 1,56 (Wellenfaktor in m/s²).
TW: Wellenperiode in s.
v: Schiffsgeschwindigkeit in Knoten.
β: Winkel zwischen Kielrichtung und Seegangsrichtung.1
β = 0° bedeutet genau von vorn einkommende See.
1 In der Norm ISO 15016 wird der Begegnungswinkel mit κ bezeichnet und beginnt mit der Zählung bei 0°
bei See von achtern (siehe auch MSC.Circ 707). Aus Gründen der besseren Anschaulichkeit im Bordbe-trieb wird hier anders verfahren.

U+S Ausschuss der See-BG Stand: Mai 2003 Richtlinien für die Überwachung der Schiffsstabilität Kapitel 2: Stabilität und Rollbewegungen im Seegang
Seite 5 von 28
Zum Ermitteln der Wellenperiode TW misst man mit der Stoppuhr mehrmals die Zeit, die ein von brechenden Wellen verursachter Schaumfleck für eine vollständige Abwärts- und Auf-wärtsbewegung braucht, also zwischen zwei aufeinander folgenden oberen Positionen. Die Wellenperiode lässt sich vom Schiff aus einfacher und genauer bestimmen, als die Wellen-länge λ und die Wellengeschwindigkeit vw. Diese lassen sich unter Verwendung des Wellen-
faktors k aus der Wellenperiode ableiten.
[ ]mTk 2W⋅=λ
[ ]kn5140T
kv WW ,
⋅=
Bei der Anwendung dieser Formeln ist zu beachten, dass durch die Messung der Wellenpe-riode nur ein Teil des komplexen Seegangs erfaßt wird. Der Seegang enthält immer auch Wellen mit vom Messwert abweichenden Perioden. Auch diese können zur Resonanz mit der Rollschwingung des Schiffes führen. Keinesfalls darf aus einer kleinen Abweichung vom Periodenverhältnis 1 oder 0,5 der Schluss gezogen werden, Resonanz sei ausgeschlossen. Vielmehr ist die Nähe zu den kritischen Werten ein Zeichen für Gefahr.
Die Begegnungsperiode ist im Allgemeinen gleich der beobachteten Stampfperiode. Bei ei-ner ausreichend starken Stampfbewegung kann diese mit der Stoppuhr direkt gemessen werden.
2.5.3 Die Rollzeit des Schiffes
Die Rollzeit des Schiffes TR ist die Zeitspanne für eine vollständige Rollschwingung, also zwischen einem Umkehrpunkt der Rollbewegung bis zum darauf folgenden gleichsinnigen Umkehrpunkt. Für kleine Winkel bis etwa 5° ist TR meistens bekannt und wird häufig als Rolleigenperiode TΦ bezeichnet.
Zur Unterscheidung der Rollzeit TR bei großen Winkeln wird die Rollzeit bei kleinen Winkeln hier mit T0° bezeichnet.
Im Hinblick auf gefährliche Rollbewegungen ist die Rollzeit bei großen Rollwinkeln von 30° (T30°) und 40° (T40°) von Bedeutung.
U+S Ausschuss der See-BG Stand: Mai 2003 Richtlinien für die Überwachung der Schiffsstabilität Kapitel 2: Stabilität und Rollbewegungen im Seegang
Seite 6 von 28
30° 40° 57,3° φ
GZ
GMc
Tangente imNullpunkt
Rollwinkel
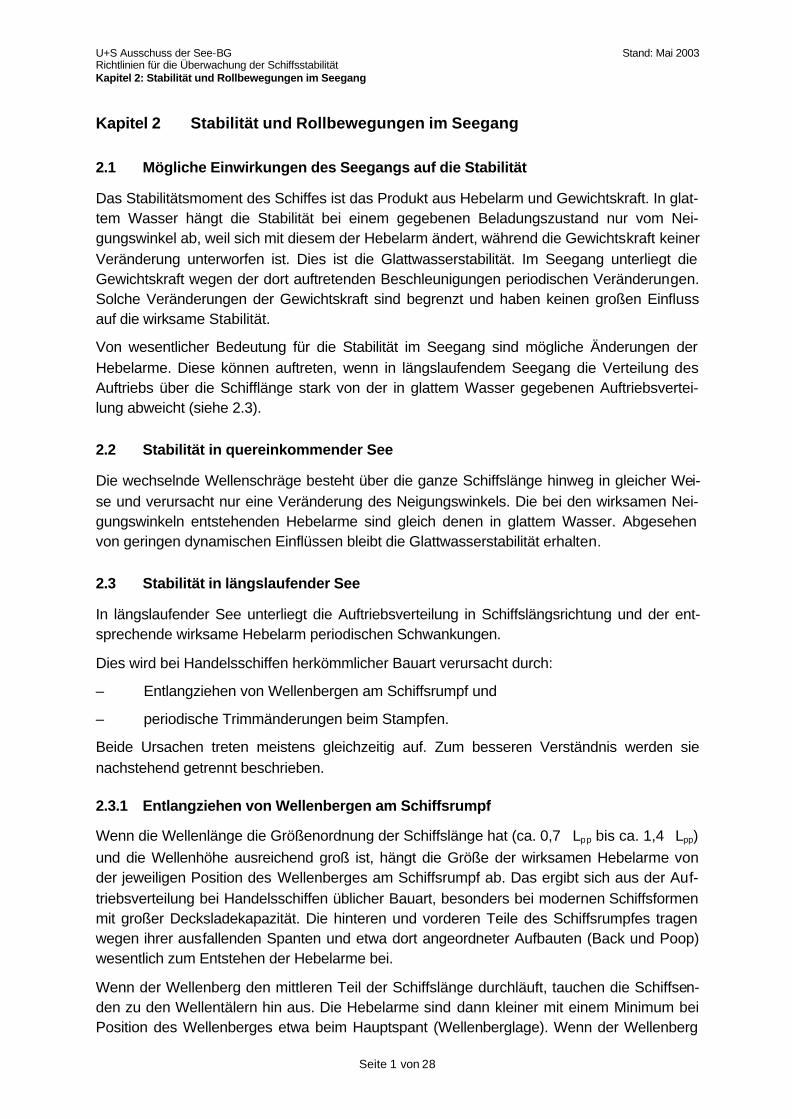
Bild 2.2: Verlauf der Hebelarmkurve weit unter der Tangente im Nullpunkt
30° 40° 57,3° φ
GZ
Tangente imNullpunkt
GMc
Rollwinkel
Bild 2.3: Verlauf der Hebelarmkurve bis zu großen Winkeln nahezu wie ihre Tangente im Nullpunkt
30° 40° 57,3° φ
GZ
GMc
Tangente imNullpunkt
Rollwinkel
Bild 2.4: Verlauf der Hebelarmkurve weit über der Tangente im Nullpunkt
U+S Ausschuss der See-BG Stand: Mai 2003 Richtlinien für die Überwachung der Schiffsstabilität Kapitel 2: Stabilität und Rollbewegungen im Seegang
Seite 7 von 28
Verläuft die Glattwasser-Hebelarmkurve bei größeren Winkeln unter ihrer Tangente im Null-punkt (Bild 2.2), sind T30° und T40° größer als T0°. Bleibt die Hebelarmkurve bis zu großen Winkeln in der Nähe ihrer Tangente im Nullpunkt (Bild 2.3), so sind die Rollzeiten bei großen Winkeln nahezu gleich T0°. Steigt die Hebelarmkurve wesentlich über ihre Tangente im Null-punkt an (Bild 2.4), so können T30° und T40° deutlich kürzer sein als T0°. Gerade in den Fällen, die in den Bildern 2.2 und 2.4 dargestellt sind, kann die Schiffsführung ohne Kenntnis der Rollzeiten bei großen Rollwinkeln ein mögliches gefährliches Periodenverhältnis nicht vor-hersehen. Ein Panmax-Containerschiff hat z.B. bei einem GMC von 0,80 m eine Rollzeit T0° von etwa 29 Sekunden. Aufgrund des Verlaufes seiner Hebelarmkurve kann die Rollzeit bei großen Rollwinkeln aber bei Werten um nur noch 22 Sekunden liegen.
Für zwei Situationen kann man T30° und T40° mit Hilfe der nachfolgend angegebenen Formeln aus der Glattwasser-Hebelarmkurve berechnen:
- Für nahezu quer einkommende See, weil dabei für alle praktischen Überlegungen ge-nau genug die Glattwasser-Hebelarmkurve gilt.
- Für das Fahren in von vorn einkommender See, wenn dabei die Wirkung des Stampfens überwiegt. Die Schwankungen der Stabilität sind dann begrenzt und die durchschnittlich wirksame Stabilität bleibt in der Nähe der Glattwasserstabilität.
Rollzeit T R bei einem Rollwinkel von 30°
[ ]sz
51
y
4
x
52
w
2249BC
T30
+++
⋅=
Φ°
,,,,
Darin bedeuten:
CΦ : Rollzeitbeiwert. 0,75 < CΦ < 0,80.
Bei Schiffen mit hoher Decksladung kann CΦ größere Werte erreichen, bei RoRo-Schiffen kann CΦ in der Nähe von 1 liegen.
B: Breite des Schiffes in m.
°⋅= 30GZ60w ,
°°° ⋅+⋅+= 302010 GZ61GZ4GZx ,
°° −⋅−= 2010 GZGZ52xy ,
°⋅+= 10GZ51xz ,
:GZ Glattwasserhebelarm in m bei dem als Index angegebenen Neigungswinkel.
U+S Ausschuss der See-BG Stand: Mai 2003 Richtlinien für die Überwachung der Schiffsstabilität Kapitel 2: Stabilität und Rollbewegungen im Seegang
Seite 8 von 28
Rollzeit T R bei einem Rollwinkel von 40°
[ ]sz
1
y
4
x
4
w
2
v
2249BC
T40
++++
⋅=
Φ°
,,
Darin bedeuten:
°⋅= 40GZ60v ,
°°° ⋅+⋅+= 403020 GZ61GZ4GZw ,
°°° −⋅−⋅+= 302010 GZGZ3GZ51wx ,
°° +⋅+= 2010 GZGZ52wy ,
°⋅+= 10GZ51yz ,
Gerechnete Beispiele für zwei verschiedene Schiffe werden in Anhang 2.1 gegeben.
Für das Fahren in achterlicher See ist die Berechnung der Rollzeiten des Schiffes an Bord schwieriger. Unter der Wirkung von hohen am Rumpf entlangziehenden Wellen können die Rollzeiten bei großen Rollwinkeln stark verändert werden. Die Rollzeit passt sich dabei auch immer mehr der Begegnungsperiode an, je kleiner die Wellenbergstabilität des Schiffes ist (siehe hierzu den letzten Absatz von 2.7.3).
2.6 Erregung von Rollbewegungen durch die Wellenschräge
Der Auftrieb wirkt senkrecht zur Wasseroberfläche, auch wenn diese geneigt ist. Beim Durchzug von quereinkommenden Wellen wird die Wasseroberfläche mit der Begegnungs-periode, die jetzt gleich der Wellenperiode ist, ständig wechselnd gegenüber dem Schiffs-rumpf geneigt. Selbst dann, wenn die Masten senkrecht zum Horizont stehen, wird durch die gegenüber dem Schiff geneigte Wasseroberfläche ein Rollmoment erzeugt. Das Schiff ist bestrebt, sich aufzurichten und beginnt eine Rollbewegung.
Beim Periodenverhältnis 1, wenn also die Begegnungsperiode gleich der Rollzeit ist, erfolgt das wechselnde Neigen der Wasseroberfläche in der Weise, dass es bei jedem Überneigen des Schiffes, nach Backbord wie auch nach Steuerbord, den Rollwinkel vergrößert. Dadurch schwingt das Schiff jedes mal mit größerem Drehschwung durch die aufrechte Lage. Erst die mit dem Rollwinkel anwachsende Rolldämpfung führt schließlich dazu, dass der zusätzliche Drehschwung während der Rollbewegung wieder aufgezehrt wird.
Periodenverhältnisse, die von 1 abweichen, führen bei Einwirkung der Wellenschräge nicht zu größeren Rollwinkeln. Voraussetzung für die Ausbildung großer Rollwinkel ist neben dem Periodenverhältnis 1, dass die Wellenschräge ausreichend wirken kann. Dies muss angenommen werden bei Ein-fallswinkeln der Wellen zwischen ca. 50° von vorne über 90° (Quersee) bis ca. 150° (schräg achterliche See) von Backbord oder von Steuerbord. Dabei nimmt die Erregung von Rollbe-wegungen durch die Wellenschräge mit zunehmender Abweichung des Einfallswinkels von 90° ab, zur Vorausrichtung stärker als zur Achterausrichtung (siehe auch 2.9).
In Anhang 2.2 wird gezeigt, wie man Resonanz mit Hilfe von Polardiagrammen erkennen und vermeiden kann.
U+S Ausschuss der See-BG Stand: Mai 2003 Richtlinien für die Überwachung der Schiffsstabilität Kapitel 2: Stabilität und Rollbewegungen im Seegang
Seite 9 von 28
2.7 Parametrische Erregung von Rollbewegungen in längslaufendem Seegang
Rollbewegungen werden nicht nur durch die Wellenschräge, sondern auch durch He-belarmschwankungen verursacht.
2.7.1 Erklärung des Begriffes „parametrisch“
Hebelarm und Gewichtskraft sind Einflussgrößen, die das Stabilitätsmoment bestimmen. Solche Größen bezeichnet man als Parameter. In 2.3.1 und 2.3.2 wurde ausgeführt, dass in längslaufendem Seegang vor allem der Para-meter Hebelarm und mit ihm das Stabilitätsmoment periodisch schwankt. Rollbewegungen können entstehen, wenn die Periode der Schwankung des Stabilitätsmo-ments in einem bestimmten Verhältnis zu der im Seegang wirksamen Rollzeit des Schiffes steht. Man verwendet dafür die Bezeichnung parametrische Erregung bzw. parametrisches Rollen.
2.7.2 Parametrische Resonanz
Die Schwankung des Parameters Hebelarm und damit der Querstabilität des Schiffes erfolgt mit der Begegnungsperiode zwischen Schiff und Wellen. Denn die Begegnungsperiode be-stimmt sowohl das Entlanglaufen von Wellenbergen am Schiffsrumpf als auch die Periode der Stampfbewegungen, weil diese überwiegend erzwungene Schwingungen sind. Parametrische Resonanz entsteht bei bestimmten Verhältnissen zwischen der Periode der Schwankungen der Querstabilität (Begegnungsperiode) und der sich dabei einstellenden Rollzeit des Schiffes. Für Handelsschiffe herkömmlicher Bauart sind nur zwei Periodenver-hältnisse von Bedeutung:
- Die Schwankung der Stabilität erfolgt mit einer Periode, die etwa gleich der Rollzeit des Schiffes ist. Die Stabilität erreicht während jeder Rollbewegung einmal ihr Minimum. Dies wird hier Periodenverhältnis 1 genannt (TB etwa gleich TR).
- Die Schwankung der Stabilität erfolgt mit einer Periode, die etwa halb so groß ist wie die Rollzeit des Schiffes. Die Stabilität erreicht während jeder Rollbewegung zweimal ihr Minimum. Dies wird hier Periodenverhältnis 0,5 genannt (TB etwa gleich 0,5·TR).
Gefährlich ist parametrische Resonanz, wenn die beiden Periodenverhältnisse für Rollzeiten bestehen, die das Schiff in längslaufender See bei großen Rollwinkeln von 30° oder 40° hat.
Eine typische Situation, in der das Periodenverhältnis 1 erreicht wird, ist das Fahren in ach-terlicher oder schräg achterlicher See. Die Begegnungsperioden werden dabei entsprechend groß. Dabei kann es zusätzlich zu den in 2.4 geschilderten Erscheinungen kommen.
Eine typische Situation, in der das Periodenverhältnis 0,5 erreicht wird, ist das Fahren in von vorn einkommender See mit der vom Seegang erzwungenen stark reduzierten Fahrt.
In dieser Situation können vor allem große Containerschiffe, Fahrgastschiffe und Ro-Ro-Schiffe in den zu ihrer Größe passenden Seegängen Begegnungsperioden antreffen, die halb so groß sind wie ihre Rollzeiten bei großen Rollwinkeln. Hierzu folgendes Beispiel:
Ein Postpanmax-Containerschiff mit L = 280 m, B = 40 m und einem Tiefgang von 13 m fährt in schwerem Wetter mit 4 Knoten gegen die See. Die Wellenperiode wird mit etwa 13 s beobachtet, was einer Wellenlänge von ca. 260 m entspricht. Bei einem GMC von 1,50 m ist
U+S Ausschuss der See-BG Stand: Mai 2003 Richtlinien für die Überwachung der Schiffsstabilität Kapitel 2: Stabilität und Rollbewegungen im Seegang
Seite 10 von 28
die Rolleigenperiode bei kleinen Winkeln (T0°) 26 s. Bei Rollwinkeln von 30° und 40° hat das Schiff im Seegang Rollzeiten von 23 s bis 24 s. Die Begegnungsperiode ist etwa 11,5 s und damit etwa halb so groß wie die Rollzeit bei großen Winkeln (siehe auch Beispiel im Dia-gramm Bild 2.5 in 2.7.4.2). Auch für kleinere Schiffe ergibt sich in dieser Situation (Fahrt gegen die See) das Perioden-verhältnis 0,5. Hierzu folgendes Beispiel:
Ein Container-Feederschiff mit L = 120 m, B = 20 m und einem Tiefgang von 8,3 m (Freibord ca. 2,6 m) fährt in schwerem Wetter mit 4 kn gegen die See. Es werden Wellenperioden von etwa 10 s bis 11 s beobachtet, was Wellenlängen von ca. 160 m bis ca. 190 m entspricht. Bei einem GMC = 0,90 m ist die Rolleigenperiode bei kleinen Winkeln (T0°) 16 s. Bei Rollwin-keln von 30° hat dieses Schiff etwa die gleiche Rollzeit, weil seine Hebelarmkurve in der Nä-he der Tangente im Nullpunkt bleibt. In längslaufendem Seegang ist die Rollzeit bei Rollwin-keln von 30° wahrscheinlich ca. 18 s. Die Begegnungsperiode ist 8 s bis 9 s und damit etwa halb so groß wie die Rollzeit bei großen Winkeln.
Parametrisches Rollen wird also für kleine Schiffe bei Fahrt gegen die See nur bei verhält-nismäßig großen GMC–Werten und in Wellen möglich, deren Wellenlänge größer als die Schiffslänge ist. Eine Auswirkung ist dann zu erwarten, wenn ein kleines Schiff sehr schlank und mit ausgeprägtem Unterschied seiner Spantformen in Vor- und Achterschiff gebaut ist.
Eine weitere Situation, in der das Periodenverhältnis 0,5 (TB etwa 0,5 ⋅ TR) auftreten kann, ist das Fahren in achterlicher See mit geringer Geschwindigkeit und nicht sehr großer Stabilität, also bei verhältnismäßig langen Rollzeiten. Beispiele für diese Situation sind das Passieren einer Barre, über die steile Wellen hinweg laufen oder das Einlaufen in ein Revier bei star-kem achterlichen Wind und Seegang.
In Anhang 2.2 wird gezeigt, wie man Resonanz mit Hilfe von Polardiagrammen erkennen und vermeiden kann.
2.7.3 Die Erregung von Rollbewegungen bei parametrischer Resonanz
Bei parametrischer Resonanz stellt sich eine ganz bestimmte zeitliche Zuordnung zwischen der periodischen Schwankung der Querstabilität und der Rollbewegung ein. Diese zeitliche Zuordnung wird dadurch erzwungen, dass das Schiff dann überholt, wenn die Stabilität am geringsten ist, also in dem Zeitabschnitt vor und nach ihrem Minimum.
Der ganze Vorgang des Überneigens findet also bei verminderter Stabilität statt. Der Beginn des Aufrichtens wird dadurch bestimmt, dass die Stabilität im Zuge ihrer periodi-schen Schwankung erst wieder ausreichend zunehmen muss. Während des Aufrichtens wächst die Stabilität weiter an. Der ganze Vorgang des Aufrichtens findet also bei erhöhter Stabilität statt. Dieser Wechsel zwischen geringerer Stabilität während des Überneigens und größerer Sta-bilität während des anschließenden Aufrichtens führt nur dann zur Erregung von Rollbewe-gungen, wenn er sich ausreichend oft regelmäßig wiederholen kann. Das ist bei den beiden genannten Periodenverhältnissen gegeben, also wenn die Begegnungsperiode etwa gleich der Rollzeit des Schiffes ist oder etwa halb so groß wie die Rollzeit. Dann ist für eine ausreichende Anzahl aufeinanderfolgender Rollbewegungen am Ende des Aufrichtens wegen der dabei größeren wirksamen Stabilität die dem Schiff innewohnende Energie (sein Drehschwung) größer als zu Beginn des vorangehenden Überneigens.
U+S Ausschuss der See-BG Stand: Mai 2003 Richtlinien für die Überwachung der Schiffsstabilität Kapitel 2: Stabilität und Rollbewegungen im Seegang
Seite 11 von 28
Der während des Aufrichtens hinzugewonnene Drehschwung vergrößert die Rollwinkel, bis er durch die Verluste infolge der zunehmenden Rolldämpfung aufgezehrt wird. Dies ge-schieht oft erst bei gefährlich großen Rollausschlägen. Beim Periodenverhältnis 1 (TB etwa gleich TR) wird auf die beschriebene Art nur einmal pro Rollbewegung, also bei jedem zweiten Aufrichten des Schiffes, neuer Drehschwung hinzu-gewonnen. Die Rollbewegungen sind asymmetrisch mit einem weiten und längeren Überho-len zur einen Seite und einem geringeren und kürzeren Rollausschlag zur anderen Seite. Deutlich gefährlicher ist das Periodenverhältnis 0,5 (TB etwa gleich 0,5 ⋅ TR). Hier be-
kommt das Schiff bei jedem Aufrichten, also zweimal bei jeder Rollbewegung, zusätzlichen Drehschwung. Hinzu kommt, dass sich die Stabilität im Vergleich zum Ablauf der Rollbewe-gung doppelt so schnell ändert wie beim Periodenverhältnis 1. Bis zum Beginn und während des Aufrichtens verschiebt sich daher die wirksame Stabilität näher zu ihrem Maximum. Da-durch wird der Unterschied zwischen der beim Überneigen einerseits und beim Aufrichten andererseits wirksamen Stabilität vergrößert. Damit erhöht sich auch der hinzugewonnene Drehschwung. Beim Periodenverhältnis 0,5 reichen schon kleinere Schwankungen der Querstabilität aus, um heftige Rollbewegungen hervorzurufen. Das erklärt das gelegentliche Auftreten sehr großer Rollausschläge bei langen Container-schiffen in von vorn einkommender See. Das Gleiche kann großen Fahrgastschiffen und Ro-Ro-Schiffen passieren.
Zwei Einflüsse steigern die parametrische Erregung von Rollbewegungen:
1. Die Größe der periodischen Schwankung der Querstabilität.
2. Eine im Verhältnis zur Größe der Schwankung kleine mittlere Stabilität (Glattwasserstabilität).
Die Stabilität muss vor Beginn des Aufrichtens deutlich zunehmen. Dazu muss das Schiff am Ende des Überneigens lange genug ungefähr in seiner größten Neigung verbleiben. Dies geschieht besonders dann, wenn die Stabilität im Minimum sehr gering oder sogar negativ wird.
Wenn die Stabilität beim Entlangziehen hoher Wellen am Schiff in der Wellenberglage sehr gering wird, dann wird der Beginn des Aufrichtens und damit der ganze Ablauf der Rollbe-wegung allein dadurch bestimmt, dass der Wellenberg wieder eine Position am Schiffsrumpf erreicht, bei der ausreichende Stabilität gegeben ist. Die Zeit zwischen dem wiederholten aufeinanderfolgenden Erreichen dieser Position wird durch die Begegnungsperiode vorge-geben. Auf diese Weise kommt es zu einer Anpassung der Rollzeit an die Begeg-nungsperiode.

U+S Ausschuss der See-BG Stand: Mai 2003 Richtlinien für die Überwachung der Schiffsstabilität Kapitel 2: Stabilität und Rollbewegungen im Seegang
Seite 12 von 28
2.7.4 Erkennbarkeit der Gefährdung durch parametrisches Rollen und Gegenmaß-nahmen
Allgemein geht aus 2.7.2 hervor:
Für die Erkennbarkeit der Gefährdung durch parametrisches Rollen ist neben der Kenntnis der Rolleigenperiode des Schiffes bei kleinen Winkeln (T0°) auch die Kenntnis seiner Rollzei-ten bei Rollwinkeln von 30° und 40° (T30°, T40°) von Bedeutung. Grundwerte für diese Rollzei-ten können für die Fahrt in vorlicher See aus der Glattwasser-Hebelarmkurve abgeschätzt werden (siehe Formeln in 2.5.3).
In 2.10 werden alle Gefährdungen durch Rollen oder weites Überholen in einer tabellari-schen Übersicht zusammengestellt mit Hinweisen zu ihrer Erkennbarkeit und zu möglichen Gegenmaßnahmen.
Nachfolgend werden nähere Angaben zu zwei ausgewählten und für die Praxis wichtigen Situationen gemacht, in denen parametrisches Rollen aufgetreten ist:
1. Das Fahren mit höheren Geschwindigkeiten in achterlicher See. Hier wird das Perio-denverhältnis 1 wirksam.
2. Die bisher folgenschwerste Situation: Das Rollen großer Containerschiffe in von vorn einkommender See. Hier wird das Periodenverhältnis 0,5 wirksam.
2.7.4.1 Rollen beim Periodenverhältnis 1 (TB etwa gleich T R) in achterlicher See
Das Schiff reagiert beim Periodenverhältnis 1 in achterlicher See schon auf anwachsenden Seegang bzw. auf zunehmend achterlich einkommenden Seegang. Anzeichen für Gefähr-dung sind asymmetrische Rollbewegungen mit einem wesentlich größeren Rollwinkel zu einer Seite und verzögertem Aufrichten aus dieser größeren Neigung. Die Begegnungsperi-ode ist erkennbar am Eintreffen der Wellenberge z.B. am Heck. Wegen der deutlichen Ten-denz zur Anpassung der Rollbewegung an die Begegnungsperiode besteht erzwungene pa-rametrische Resonanz für einen größeren Bereich von Begegnungsperioden. Als kleinste gefährliche Begegnungsperiode sollte angesehen werden:
– T0°, wenn die Hebelarmkurve in der Nähe oder unter ihrer Tangente im Nullpunkt ver-läuft bzw.
– 0,5 ⋅ (T0° + T30°), wenn die Hebelarmkurve bis ca. 30° weit über ihrer Tangente im Nullpunkt verläuft.
Gegenmaßnahmen beim Periodenverhältnis 1 (TB etwa gleich TR) in achterlicher See: Der Kurs ist soweit zu ändern, dass zwischen Laufrichtung der See und der Kielrichtung ein Winkel von mindestens 50° entsteht. Wenn der Kurs gehalten werden muss, ist die Ge-schwindigkeit möglichst unter den kleinsten Wert zu reduzieren, der sich für Wellenlängen λ = 0, 7 ⋅ Lpp und λ = 1,4 ⋅ Lpp nach der folgenden Formel ergibt:
[ ]knT
k95,1vB
λ−⋅λ⋅=
U+S Ausschuss der See-BG Stand: Mai 2003 Richtlinien für die Überwachung der Schiffsstabilität Kapitel 2: Stabilität und Rollbewegungen im Seegang
Seite 13 von 28
Darin ist einzusetzen für: λ = Wellenlänge in [m], 0,7 ⋅ Lpp und 1,4 ⋅ Lpp k = 1,56 [m/s²] TB: kleinste gefährliche Begegnungsperiode in [s]. v ist dann die empfohlene maximale Geschwindigkeit in Knoten. Ist dabei die Steuerfähigkeit nicht mehr gewährleistet, bleibt als Maßnahme nur die Kursänderung.
Ein mit vorstehender Formel gerechnetes Beispiel findet sich im Anhang 2.1.
U+S Ausschuss der See-BG Stand: Mai 2003 Richtlinien für die Überwachung der Schiffsstabilität Kapitel 2: Stabilität und Rollbewegungen im Seegang
Seite 14 von 28
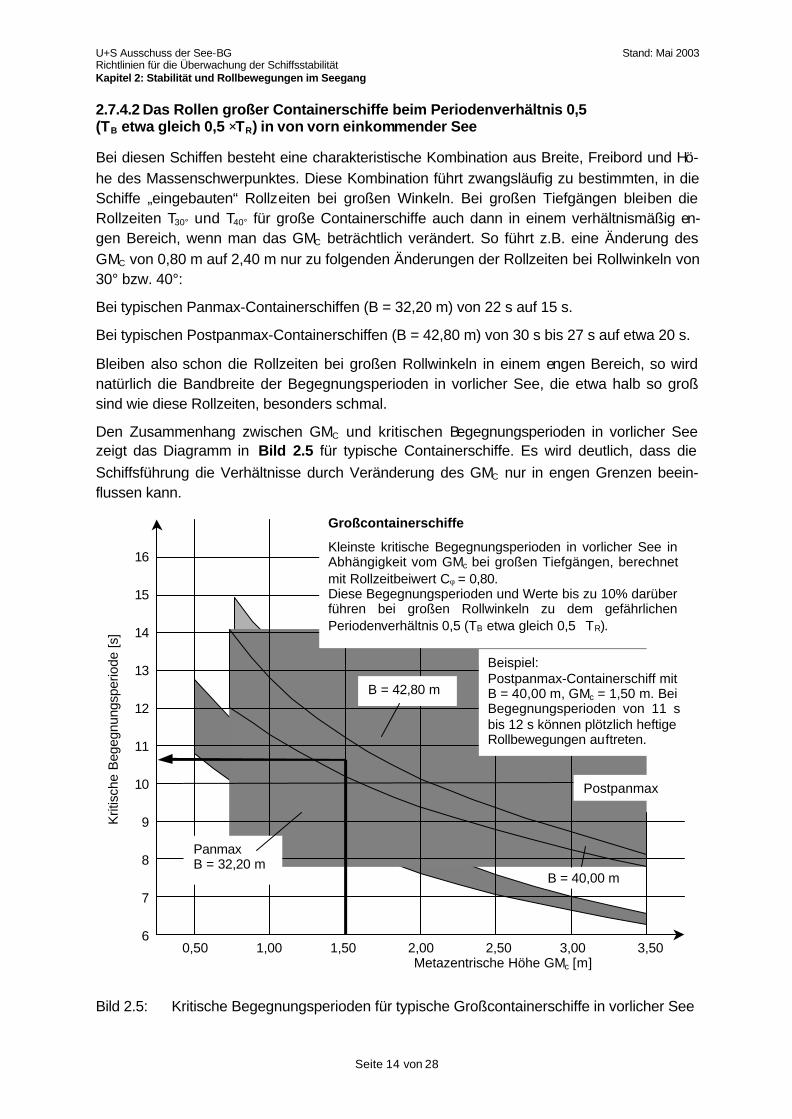
2.7.4.2 Das Rollen großer Containerschiffe beim Periodenverhältnis 0,5 (TB etwa gleich 0,5 ⋅ TR) in von vorn einkommender See
Bei diesen Schiffen besteht eine charakteristische Kombination aus Breite, Freibord und Hö-he des Massenschwerpunktes. Diese Kombination führt zwangsläufig zu bestimmten, in die Schiffe „eingebauten“ Rollzeiten bei großen Winkeln. Bei großen Tiefgängen bleiben die Rollzeiten T30° und T40° für große Containerschiffe auch dann in einem verhältnismäßig en-gen Bereich, wenn man das GMC beträchtlich verändert. So führt z.B. eine Änderung des GMC von 0,80 m auf 2,40 m nur zu folgenden Änderungen der Rollzeiten bei Rollwinkeln von 30° bzw. 40°:
Bei typischen Panmax-Containerschiffen (B = 32,20 m) von 22 s auf 15 s.
Bei typischen Postpanmax-Containerschiffen (B = 42,80 m) von 30 s bis 27 s auf etwa 20 s.
Bleiben also schon die Rollzeiten bei großen Rollwinkeln in einem engen Bereich, so wird natürlich die Bandbreite der Begegnungsperioden in vorlicher See, die etwa halb so groß sind wie diese Rollzeiten, besonders schmal.
Den Zusammenhang zwischen GMC und kritischen Begegnungsperioden in vorlicher See zeigt das Diagramm in Bild 2.5 für typische Containerschiffe. Es wird deutlich, dass die Schiffsführung die Verhältnisse durch Veränderung des GMC nur in engen Grenzen beein-flussen kann.
16
15
14
13
12
11
10
9
8
7
6
Krit
isch
e B
egeg
nung
sper
iode
[s]
0,50 1,00 1,50 2,00 2,50 3,00 3,50Metazentrische Höhe GMc [m]
PanmaxB = 32,20 m
B = 42,80 m
Postpanmax
Großcontainerschiffe
Kleinste kritische Begegnungsperioden in vorlicher See inAbhängigkeit vom GMc bei großen Tiefgängen, berechnetmit Rollzeitbeiwert Cφ = 0,80.Diese Begegnungsperioden und Werte bis zu 10% darüberführen bei großen Rollwinkeln zu dem gefährlichenPeriodenverhältnis 0,5 (TB etwa gleich 0,5 ⋅ TR).
Beispiel:Postpanmax-Containerschiff mitB = 40,00 m, GMc = 1,50 m. BeiBegegnungsperioden von 11 sbis 12 s können plötzlich heftigeRollbewegungen auftreten.
B = 40,00 m
Bild 2.5: Kritische Begegnungsperioden für typische Großcontainerschiffe in vorlicher See
U+S Ausschuss der See-BG Stand: Mai 2003 Richtlinien für die Überwachung der Schiffsstabilität Kapitel 2: Stabilität und Rollbewegungen im Seegang
Seite 15 von 28
Das Diagramm in Bild 2.5 zeigt:
Für große Containerschiffe mit großen Tiefgängen können in vorlicher See Begegnungsperi-oden zwischen 7 s und 14 s dazu führen, dass gerade für den Fall großer Rollwinkel das besonders gefährliche Periodenverhältnis 0,5 (TB etwa gleich 0,5 ⋅ TR) entsteht.
Genau diese Begegnungsperioden werden bei reduzierter Fahrt in von vorn einkommender See mit Wellenlängen ab ca. 150 m angetroffen.
Man sieht aus dem Diagramm in Bild 2.5, dass Begegnungsperioden in der Nähe von 8 s einem steif beladenen Panmax-Containerschiff gefährlich werden können, während Begeg-nungsperioden von 12 s bis 13 s bei einem sehr weich beladenen Postpanmax-Containerschiff zu parametrischen Rollen führen können.
Erkennbarkeit der Gefährdung in von vorn einkommender See Das Schiff reagiert beim Periodenverhältnis 0,5 (TB etwa gleich 0,5 ⋅ TR) in vorlicher See ohne Vorwarnung. Es kann sich plötzlich in wenigen Rollbewegungen zu sehr großen Winkeln aufschaukeln.
Weil dies dann nicht mehr abgewendet werden kann, muss man solche Situationen, soweit möglich, vorausschauend vermeiden. Dazu können folgende Schritte dienen:
- Die Begegnungsperiode mit Hilfe der erzwungenen Stampfbewegungen messen,
- aus dem Diagramm Bild 2.5 den für das aktuelle GMC kritischen Bereich von Be-gegnungsperioden entnehmen und mit der benachbarten Stampfperiode vergleichen,
oder vorzugsweise
- die Rollzeit bei kleinen Winkeln (T0°) messen oder für das aktuelle GMC berechnen,
- die Rollzeit T30° aus der Glattwasser-Hebelarmkurve berechnen (Formel in 2.5.3).
Gefährdung durch parametrisches Rollen ist gegeben, wenn folgendes beobachtet wird:
1. Aus dem Diagramm Bild 2.5 oder durch die Berechnung von T30° ergibt sich, dass die vorherrschende Begegnungsperiode zu grossen Rollwinkeln führen kann.
2. Die Begegnungsperiode (Stampfperiode) ist etwa halb so groß wie irgend ein Wert zwischen T0° und T30°.
3. Ein Überneigen zu kleinen Winkeln erfolgt mehrfach hintereinander zusammen mit dem Absenken des Bugs.
Es ist zu beobachten, dass Änderungen der Wassertiefe auf dem Festlandsockel die Wel-lenperiode und damit die Begegnungsperiode verändern können.
Gegenmaßnahmen beim Periodenverhältnis 0,5 (TB etwa gleich 0,5 ⋅ TR) in von vorn einkommender See Der Kurs ist soweit zu ändern, dass die See unter einem Winkel von etwa 50° einkommt. Wenn bei großen Schiffen auch T30° und T40° noch über 18 s liegen, ist das Schiff quer zur See zu legen. Fahrtänderungen, welche die Begegnungsperiode in dem hier erforderlichen Maß ändern, sind in schwerer von vorn einkommender See nicht möglich oder nicht zu empfehlen.
U+S Ausschuss der See-BG Stand: Mai 2003 Richtlinien für die Überwachung der Schiffsstabilität Kapitel 2: Stabilität und Rollbewegungen im Seegang
Seite 16 von 28
2.7.5 Feststellung der Gefährdung durch Rollbewegungen im Seegang mit Hilfe von Programmen für Bordrechner
Wird zur Feststellung der Gefährdung durch Rollbewegungen im Seegang ein Rechner ein-gesetzt, muss das Programm durch die See-Berufsgenossenschaft geprüft sein.
Es muss geprüft werden, nach welchen Verfahren die Berechnungen durchgeführt werden und welche physikalischen Phänomene erfasst werden, z. B. Erregung von Rollbewegungen durch die Wellenschrägen und die parametrische Erregung von Rollbewegungen.2
Kapitel 5 ist sinngemäß anzuwenden.
2.8 Positive Wirkung von achterlastigem Trimm in längslaufender See
Achterlastiger Trimm verstärkt die stabilisierende Wirkung der ausladenden Heckspanten, insbesondere bei ausgeprägtem Spiegelheck:
- Im achterlichen Seegang taucht beim Entlangziehen der Wellenberge am Rumpf der Heckbereich später aus und kommt früher nach dem Passieren der Welle am Haupt-spant wieder zu Wasser,
- Beim Stampfen in von vorn einkommender See kommt während der Bewegung des Bugs nach unten der Heckbereich nicht so weit aus dem Wasser und taucht nach dem vorderen Umkehrpunkt der Stampfbewegung früher und tiefer wieder ein.
In beiden Fällen, in achterlicher wie in vorlicher See, mindert achterlastiger Trimm den Ab-bau der Stabilität bei ihrem Minimum und auch die Größe der periodischen Schwankungen der Stabilität. Dadurch wird die Anfälligkeit für parametrisches Rollen reduziert.
2.9 Gefahren in schräg achterlicher See
Kommt die See schräg achterlich ein, überlagern sich die Erregung von Rollbewegungen durch die Wellenschräge und die Wirkung der am Schiffsrumpf entlangziehenden Wellen-berge. Wegen der ausladenden Heckspanten, vor allem bei Schiffen mit Spiegelheck, kann die Wel-lenschräge bei schräg von achtern anlaufender See noch starke Krängungen des Schiffes nach Lee verursachen. Läuft dann derselbe Wellenberg, der das Schiff stark gekrängt hat, weiter zum Hauptspant, wird das Stabilitätsmoment auch in schräg achterlicher See noch stark reduziert. So fehlt 2 Die heute (Frühjahr 2003) im Bordbetrieb verwendeten Programme zum Erkennen solcher Kombinationen von Kurs und Geschwindigkeit, die zu starken Rollbewegungen führen können, berücksichtigen nur die Erregung von Rollbewegungen durch die Wellenschräge. Sie verwenden daher auch nur das Periodenverhältnis 1 (TB etwa gleich TR) als Kriterium für eine Warnung. Die Wellenschräge hat aber gerade dann kaum noch Einfluss, wenn parametrisches Rollen auftreten kann, nämlich in längslaufendem Seegang.
Mögliches parametrisches Rollen wird von den derzeitigen Programmen nicht erkannt, weil es physikalisch ganz andere Ursachen hat als die Wellenschräge. Außerdem informieren die Programme die Schiffsführung nicht über das Auftreten des Periodenverhältnisses 0,5 (TB etwa gleich 0,5 ⋅ TR) bei dem parametrisches Rollen besonders gefährlich sein kann (siehe 2.7.3).
Die derzeit (Frühjahr 2003) an Bord verwendeten Programme können noch nicht vor parametrischem Rollen warnen, weil Untersuchungen hierzu bisher nur mit Modellversuchen oder sehr komplexen Simulationsmethoden mit großem Rechenaufwand möglich sind.
U+S Ausschuss der See-BG Stand: Mai 2003 Richtlinien für die Überwachung der Schiffsstabilität Kapitel 2: Stabilität und Rollbewegungen im Seegang
Seite 17 von 28
dem Schiff das notwendige Aufrichtungsvermögen, der Neigungswinkel kann sehr groß wer-den. Erst wenn der Wellenberg zum Vorschiff durchläuft, richtet sich das Schiff wieder auf. Wenn die schräg von achtern anlaufenden Wellenberge das Heck erfassen, bewirken sie auch ein starkes Giermoment, welches das Schiff stark nach Luv drehen lässt. Damit ist die Gefahr des Querschlagens verbunden. Gerade bei kleineren völligen Schiffen ist diese Ge-fahr besonders groß.
Das Querschlagen stellt durch die Einwirkung der Fliehkraft eine erhebliche Beanspruchung der Stabilität dar, besonders wenn der Massenschwerpunkt hoch über der Wasserlinie liegt. Das Schiff durchläuft beim Querschlagen eine gekrümmte Bahn mit sehr kleinem Radius. Dadurch sind die Fliehkraft und damit das Rollmoment besonders groß.
U+S Ausschuss der See-BG Stand: Mai 2003 Richtlinien für die Überwachung der Schiffsstabilität Kapitel 2: Stabilität und Rollbewegungen im Seegang
Seite 18 von 28
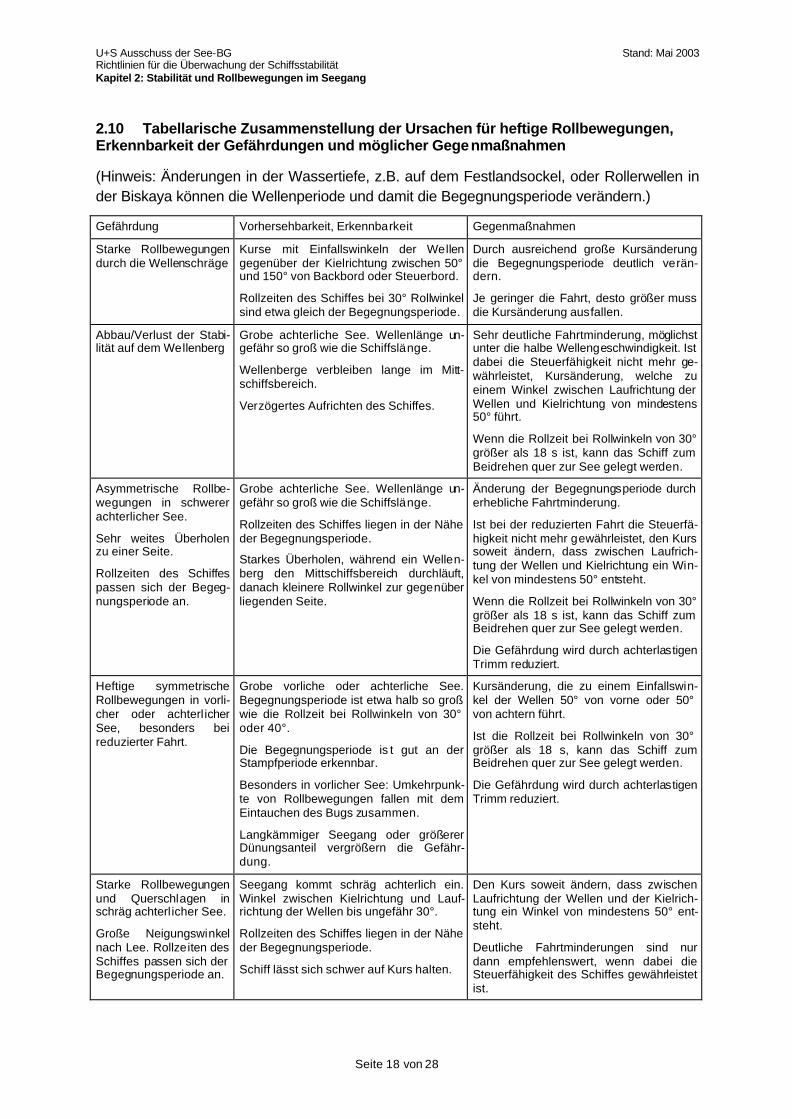
2.10 Tabellarische Zusammenstellung der Ursachen für heftige Rollbewegungen, Erkennbarkeit der Gefährdungen und möglicher Gegenmaßnahmen
(Hinweis: Änderungen in der Wassertiefe, z.B. auf dem Festlandsockel, oder Rollerwellen in der Biskaya können die Wellenperiode und damit die Begegnungsperiode verändern.)
Gefährdung Vorhersehbarkeit, Erkennbarkeit Gegenmaßnahmen
Starke Rollbewegungen durch die Wellenschräge
Kurse mit Einfallswinkeln der Wellen gegenüber der Kielrichtung zwischen 50° und 150° von Backbord oder Steuerbord.
Rollzeiten des Schiffes bei 30° Rollwinkel sind etwa gleich der Begegnungsperiode.
Durch ausreichend große Kursänderung die Begegnungsperiode deutlich verän-dern.
Je geringer die Fahrt, desto größer muss die Kursänderung ausfallen.
Abbau/Verlust der Stabi-lität auf dem Wellenberg
Grobe achterliche See. Wellenlänge un-gefähr so groß wie die Schiffslänge.
Wellenberge verbleiben lange im Mitt-schiffsbereich.
Verzögertes Aufrichten des Schiffes.
Sehr deutliche Fahrtminderung, möglichst unter die halbe Wellengeschwindigkeit. Ist dabei die Steuerfähigkeit nicht mehr ge-währleistet, Kursänderung, welche zu einem Winkel zwischen Laufrichtung der Wellen und Kielrichtung von mindestens 50° führt.
Wenn die Rollzeit bei Rollwinkeln von 30° größer als 18 s ist, kann das Schiff zum Beidrehen quer zur See gelegt werden.
Asymmetrische Rollbe-wegungen in schwerer achterlicher See.
Sehr weites Überholen zu einer Seite.
Rollzeiten des Schiffes passen sich der Begeg-nungsperiode an.
Grobe achterliche See. Wellenlänge un-gefähr so groß wie die Schiffslänge.
Rollzeiten des Schiffes liegen in der Nähe der Begegnungsperiode.
Starkes Überholen, während ein Wellen-berg den Mittschiffsbereich durchläuft, danach kleinere Rollwinkel zur gegenüber liegenden Seite.
Änderung der Begegnungsperiode durch erhebliche Fahrtminderung.
Ist bei der reduzierten Fahrt die Steuerfä-higkeit nicht mehr gewährleistet, den Kurs soweit ändern, dass zwischen Laufrich-tung der Wellen und Kielrichtung ein Win-kel von mindestens 50° entsteht.
Wenn die Rollzeit bei Rollwinkeln von 30° größer als 18 s ist, kann das Schiff zum Beidrehen quer zur See gelegt werden.
Die Gefährdung wird durch achterlastigen Trimm reduziert.
Heftige symmetrische Rollbewegungen in vorli-cher oder achterl icher See, besonders bei reduzierter Fahrt.
Grobe vorliche oder achterliche See. Begegnungsperiode ist etwa halb so groß wie die Rollzeit bei Rollwinkeln von 30° oder 40°.
Die Begegnungsperiode is t gut an der Stampfperiode erkennbar.
Besonders in vorlicher See: Umkehrpunk-te von Rollbewegungen fallen mit dem Eintauchen des Bugs zusammen.
Langkämmiger Seegang oder größerer Dünungsanteil vergrößern die Gefähr-dung.
Kursänderung, die zu einem Einfallswin-kel der Wellen 50° von vorne oder 50° von achtern führt.
Ist die Rollzeit bei Rollwinkeln von 30° größer als 18 s, kann das Schiff zum Beidrehen quer zur See gelegt werden.
Die Gefährdung wird durch achterlastigen Trimm reduziert.
Starke Rollbewegungen und Querschlagen in schräg achterl icher See.
Große Neigungswinkel nach Lee. Rollzeiten des Schiffes passen sich der Begegnungsperiode an.
Seegang kommt schräg achterlich ein. Winkel zwischen Kielrichtung und Lauf-richtung der Wellen bis ungefähr 30°.
Rollzeiten des Schiffes liegen in der Nähe der Begegnungsperiode.
Schiff lässt sich schwer auf Kurs halten.
Den Kurs soweit ändern, dass zwischen Laufrichtung der Wellen und der Kielrich-tung ein Winkel von mindestens 50° ent-steht.
Deutliche Fahrtminderungen sind nur dann empfehlenswert, wenn dabei die Steuerfähigkeit des Schiffes gewährleistet ist.
U+S Ausschuss der See-BG Stand: Mai 2003 Richtlinien für die Überwachung der Schiffsstabilität Kapitel 2: Stabilität und Rollbewegungen im Seegang
Seite 19 von 28
2.11 Anhang 2.1
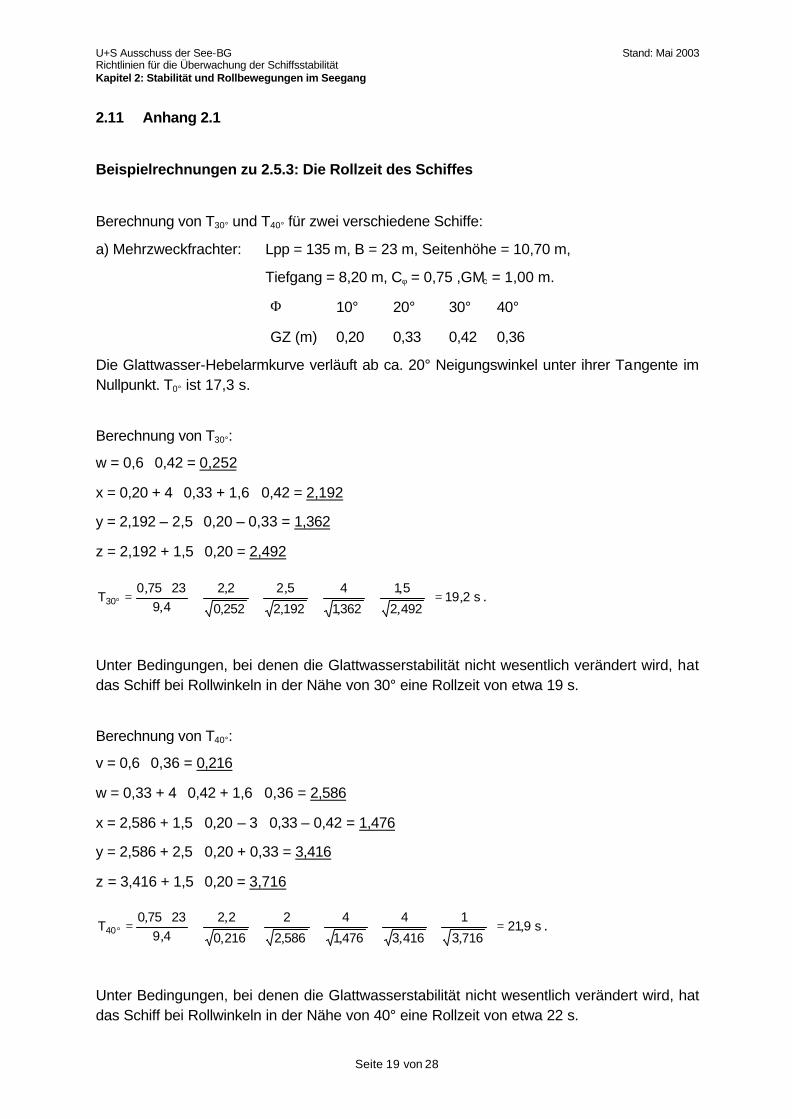
Beispielrechnungen zu 2.5.3: Die Rollzeit des Schiffes
Berechnung von T30° und T40° für zwei verschiedene Schiffe:
a) Mehrzweckfrachter: Lpp = 135 m, B = 23 m, Seitenhöhe = 10,70 m,
Tiefgang = 8,20 m, Cφ = 0,75 ,GMc = 1,00 m.
Φ 10° 20° 30° 40°
GZ (m) 0,20 0,33 0,42 0,36
Die Glattwasser-Hebelarmkurve verläuft ab ca. 20° Neigungswinkel unter ihrer Tangente im Nullpunkt. T0° ist 17,3 s.
Berechnung von T30°:
w = 0,6 ⋅ 0,42 = 0,252
x = 0,20 + 4 ⋅ 0,33 + 1,6 ⋅ 0,42 = 2,192
y = 2,192 – 2,5 ⋅ 0,20 – 0,33 = 1,362
z = 2,192 + 1,5 ⋅ 0,20 = 2,492
s2194922
51
3621
4
1922
52
2520
2249
23750T30 ,
,
,
,,
,
,
,,
,=
+++⋅
⋅=° .
Unter Bedingungen, bei denen die Glattwasserstabilität nicht wesentlich verändert wird, hat das Schiff bei Rollwinkeln in der Nähe von 30° eine Rollzeit von etwa 19 s.
Berechnung von T40°:
v = 0,6 ⋅ 0,36 = 0,216
w = 0,33 + 4 ⋅ 0,42 + 1,6 ⋅ 0,36 = 2,586
x = 2,586 + 1,5 ⋅ 0,20 – 3 ⋅ 0,33 – 0,42 = 1,476
y = 2,586 + 2,5 ⋅ 0,20 + 0,33 = 3,416
z = 3,416 + 1,5 ⋅ 0,20 = 3,716
s9217163
1
4163
4
4761
4
5862
2
2160
2249
23750T40 ,
,,,,,
,,
,=
++++⋅
⋅=° .
Unter Bedingungen, bei denen die Glattwasserstabilität nicht wesentlich verändert wird, hat das Schiff bei Rollwinkeln in der Nähe von 40° eine Rollzeit von etwa 22 s.

U+S Ausschuss der See-BG Stand: Mai 2003 Richtlinien für die Überwachung der Schiffsstabilität Kapitel 2: Stabilität und Rollbewegungen im Seegang
Seite 20 von 28
b) Containerschiff Lpp = 282 m, B = 32,20 m, Seitenhöhe = 21,40 m,
Tiefgang = 12,00 m, Cφ = 0,80 ,GMc = 1,00 m.
Φ 10° 20° 30° 40°
GZ (m) 0,19 0,47 0,96 1,46
Die Glattwasser-Hebelarmkurve verläuft ab ca. 20° Neigungswinkel sehr weit über ihrer Tan-gente im Nullpunkt. T0° ist 25,8 s.
Berechnung von T30°:
w = 0,6 ⋅ 0,96 = 0,576
x = 0,19 + 4 ⋅ 0,47 + 1,6 ⋅ 0,96 = 3,606
y = 3,606 – 2,5 ⋅ 0,19 – 0,47 = 2,661
z = 3,606 + 1,5 ⋅ 0,19 = 3,891
s4208913
51
6612
4
6063
52
5760
2249
23280T30 ,
,
,
,,
,
,
,,
,,=
+++⋅
⋅=° .
Unter Bedingungen, bei denen die Glattwasserstabilität nicht wesentlich verändert wird, hat das Schiff bei Rollwinkeln in der Nähe von 30° eine Rollzeit von 20 s bis 21 s.
Berechnung von T40°:
v = 0,6 ⋅ 1,46 = 0,876
w = 0,47 + 4 ⋅ 0,96 + 1,6 ⋅ 1,46 = 6,646
x = 6,646 + 1,5 ⋅ 0,19 – 3 ⋅ 0,47 – 0,96 = 4,561
y = 6,646 + 2,5 ⋅ 0,19 + 0,47 = 7,591
z = 7,591 + 1,5 ⋅ 0,19 = 7,876
s7188767
1
5917
4
5614
4
6466
2
8760
2249
23280T40 ,
,,,,,
,,
,,=
++++⋅
⋅=° .
Unter Bedingungen, bei denen die Glattwasserstabilität nicht wesentlich verändert wird, hat das Schiff bei Rollwinkeln in der Nähe von 40° eine Rollzeit von etwa 19 s.

U+S Ausschuss der See-BG Stand: Mai 2003 Richtlinien für die Überwachung der Schiffsstabilität Kapitel 2: Stabilität und Rollbewegungen im Seegang
Seite 21 von 28
Beispielrechnung zu 2.7.4.1: Rollen beim Periodenverhältnis 1 (T B etwa gleich TR) in achterlicher See
Bestimmung der maximalen Geschwindigkeit zum Vermeiden des Periodenverhältnisses 1
Containerschiff Lpp = 193 m, B = 32,20 m, Seitenhöhe = 18,80 m,
Tiefgang = 11,00 m, Cφ = 0,80 , GMc = 0,60 m.
Φ 10° 20° 30° 40°
GZ (m) 0,12 0,35 0,75 0,82
Die Glattwasser-Hebelarmkurve verläuft ab ca. 20° Neigungswinkel weit über ihrer Tangente
im Nullpunkt.
T0° = 28,8 s; T30° = 23,2 s. (Formel siehe 2.5.3: Die Rollzeit des Schiffes).
Die kleinste gefährliche Begegnungsperiode ist
( ) s026s223s82850TB ,,,, =+⋅= .
a) Maximale Geschwindigkeit für λ = 0,7 ⋅ 193 m = 135 m.
k = 1,56 [m/s²]
kn2,1826135
56,113595,1v =
−⋅⋅= .
b) Maximale Geschwindigkeit für λ = 1,4 ⋅ 193 m = 270 m.
kn8,1926270
56,127095,1v =
−⋅⋅=
Reduziert man die Geschwindigkeit deutlich unter den kleineren Wert 18,2 kn, z.B. auf 15 kn,
so ergeben sich in dem betrachteten Bereich der Wellenlängen Begegnungsperioden von ca.
20 bis 21 s. Diese liegen dann gut unterhalb der kleinsten gefährlichen Begegnungsperiode
von 26 s.

U+S Ausschuss der See-BG Stand: Mai 2003 Richtlinien für die Überwachung der Schiffsstabilität Kapitel 2: Stabilität und Rollbewegungen im Seegang
Seite 22 von 28
2.12 Anhang 2.2
Die nachstehend beschriebenen Polardiagramme und deren Anwendung zum Erken-nen und Vermeiden von Resonanz dürfen nicht als alleinige Entscheidungsgrundlage für die Wahl von Kurs und Geschwindigkeit dienen. Zusätzlich sind die Gesichtspunk-te der möglichen Stabilitätsgefährdung in achterlicher See, der Beibehaltung der Steuerfähigkeit und der Beachtung navigatorischer Gegebenheiten einschließlich des Fahrens in Verkehrstrennungsgebieten zu beachten.
Polardiagramme als Hilfsmittel zum Vermeiden von Resonanz Resonanz herrscht, wie vorstehend ausgeführt, wenn die Begegnungsperiode TB gleich der Rollzeit TR oder gleich der halben Rollzeit TR/2 ist. Will man Resonanz vermeiden, so kommt es darauf an, diejenigen Paarungen von Geschwindigkeit und Kurs zum Seegang zu vermei-den, die zu solchen Begegnungsperioden führen.
Die Begegnungsperiode lässt sich mit der in 2.5.2 genannten Formel berechnen. Um die kritischen Paarungen von Geschwindigkeit und Kurs zum Seegang zu erhalten, muss diese Formel so umgestellt werden, dass sie die kritische Geschwindigkeit bei jedem gewünschten Begegnungswinkel liefert. Die umgestellten Formeln lauten:
Für das Periodenverhältnis 1 (TB etwa gleich TR): ( ) [ ]kn
T5140TTTk
vR
RW2
WR β⋅⋅
⋅−⋅=
cos,
Für das Periodenverhältnis 0,5 (TB etwa gleich 0,5 ⋅ TR): ( ) [ ]kn
T5140TTT2k
vR
RW2
WR β⋅⋅
⋅−⋅⋅=
cos,
Für TR ist die Rollzeit bei großen Winkeln einzusetzen (z.B. TR bei 30°).
Um lange Berechnungen zu ersparen, können die Lösungen dieser Formeln für in Frage kommende Kurse zum Seegang in Polardiagrammen graphisch dargestellt werden. Dabei ist es sinnvoll, je ein eigenes Blatt für jede mögliche Rollzeit des Schiffes in vollen Sekunden anzulegen. Solche Blätter werden nachstehend beispielhaft für die Rollzeiten von 10, 15 und 20 Sekunden dargestellt.
Die Winkeleinteilung des Polardiagramms ist auf die Einfallsrichtung des Seegangs bezogen. Schiffsgeschwindigkeiten werden als Vektoren dargestellt, die ihren Ursprung im Mittelpunkt des Diagramms haben und deren Richtung sich auf den einfallenden Seegang bezieht. Die Länge des Vektors entspricht der Geschwindigkeit in kn.
Alle in Bezug auf Resonanz kritischen Geschwindigkeiten werden in diesen Diagrammen als Vektoren dargestellt, deren Spitzen auf geraden Linien quer zur Laufrichtung der Wellen lie-gen.
Die roten (durchgezogenen) Linien gelten für das Periodenverhältnis 1 (TB gleich TR). Diese Linien laufen für Wellenperioden von 8 Sekunden und darüber für das Beispielschiff von ca.
U+S Ausschuss der See-BG Stand: Mai 2003 Richtlinien für die Überwachung der Schiffsstabilität Kapitel 2: Stabilität und Rollbewegungen im Seegang
Seite 23 von 28
120 m Länge quer über das ganze Diagramm, weil sie sowohl für die parametrische Erre-gung in längs laufender See als auch für die Erregung in schräg oder quer einkommender See gelten. Für kürzere Wellenperioden kann der Bereich von ± 30° zur längs laufenden See
ausgelassen werden, weil einerseits die Energieübertragung durch die Wellenschräge für diese Begegnungswinkel zu gering ist und andererseits die Wellenlänge für parametrische Erregung noch nicht ausreicht.
Die orangefarbigen (gestrichelten) Linien gelten für das Periodenverhältnis 0,5 mit TB gleich 0,5 ⋅ TR. Diese Linien sind nur für die Begegnungswinkel im Bereich von ± 30° zur längs lau-fenden See eingetragen, wobei auch hier wegen der zur parametrischen Erregung notwen-digen Wellenlänge nur Wellenperioden von 8 Sekunden und darüber berücksichtigt worden sind.
Bei der Verwendung dieser Resonanzblätter ist zu beachten, dass auch dann Resonanz auftreten kann, wenn die Spitze des Fahrtvektors neben der Linie der beobachteten Wellen-periode liegt. Diese Streubreite erklärt sich aus der Streuung der Wellenperioden, der Wel-lenrichtung und des Faktors k sowie aus der Streuung der Rollzeiten und der Schwankungen von Fahrt und Kurs des Schiffes. Deshalb ist bei der Wahl von Fahrt und Kurs zur Vermei-dung von Resonanz zunächst ein reichlicher Abstand der Spitze des Fahrtvektors von der kritischen Linie zu suchen, um anschließend durch schrittweises Probieren die Grenze des Resonanzbereichs zu ermitteln und den für die Fortsetzung der Reise günstigsten Fahrtvek-tor zu finden.
Es ist besonders zu beachten, dass in längs laufender See die Rollzeit TR länger werden kann, weil die durchschnittlich wirksame Stabilität verringert wird. Dadurch verschiebt sich die zu meidende kritische Geschwindigkeit bei vorlicher See zu kleineren Werten und bei achterlicher See zu größeren Werten. Die Größenordnung dieser Änderung kann durch Ver-gleich der Resonanzblätter benachbarter Rollzeiten festgestellt werden.
Die nachstehenden Beispiele sind ausschließlich zur Erläuterung der Handhabung der Re-sonanzdiagramme gedacht. Es dürfen folglich aus den angebotenen Lösungen keine grund-sätzlichen Handlungsanweisungen abgeleitet werden, da im Einzelfall stets auch weitere Gegebenheiten und Einflüsse zu beachten sind, wie eingangs bereits angemerkt worden ist.
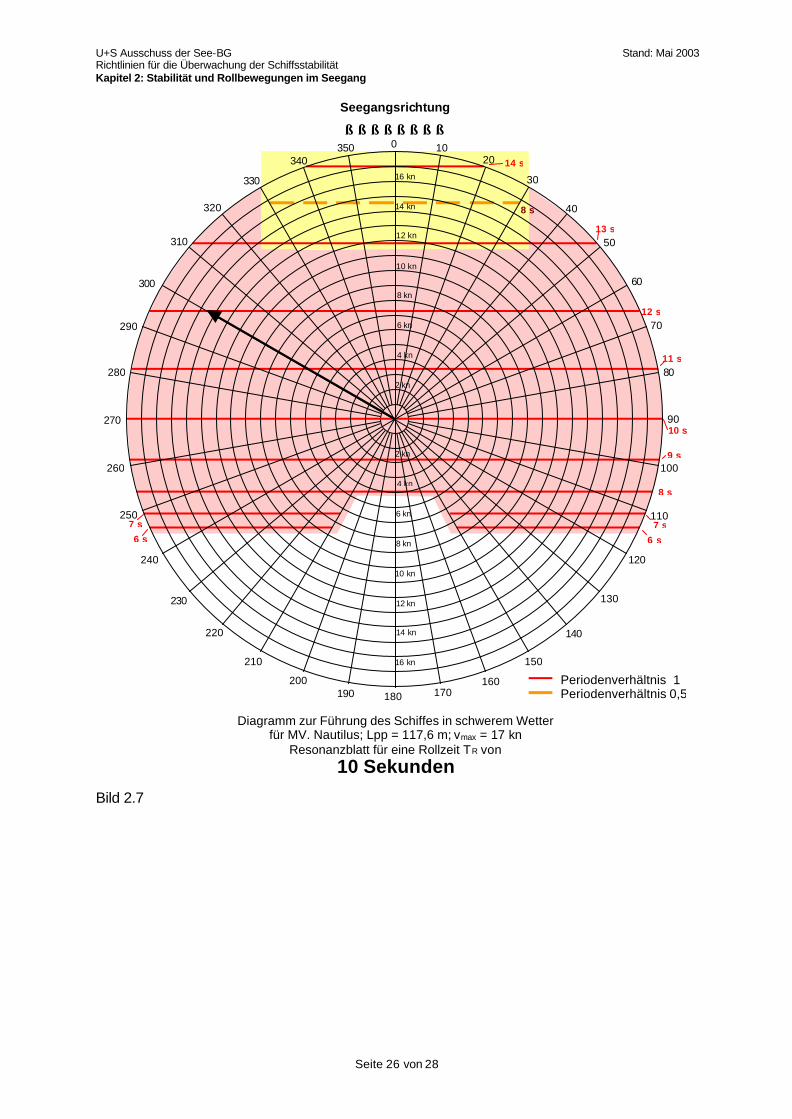
Beispiel 1:
Das Schiff hat eine Rollzeit TR von 10 Sekunden und fährt mit 14,6 kn einen Kurs, bei dem die Wellen 60° von Steuerbord kommen. Der zugehörige Fahrtvektor verläuft im Diagramm (Bild 2.7) in Richtung 300° und liegt mit seiner Spitze auf der roten (durchgezogenen) Linie für eine Wellenperiode von 12 Sekunden. Das bedeutet, dass bei dieser Wellenperiode die Begegnungsperiode genau 10 Sekunden beträgt und daher Resonanz beim Periodenver-hältnis 1 zu erwarten ist, wenn Seegang mit 12 Sekunden Wellenperiode auftritt.
Beispiel 2:
Das Schiff hat eine Rollzeit TR von 15 Sekunden und fährt mit 15,0 kn einen rechtweisenden Kurs von 25°. Der Seegang kommt aus der Richtung 165° mit einer Wellenperiode TW = 8 Sekunden. Der auf die Seegangsrichtung bezogene Kurs beträgt (360° + 25°) – 165° = 220°.
Der Fahrtvektor wird im Diagramm (Bild 2.8) bei 220° mit einer Länge entsprechend 15,0 kn eingetragen. Die Spitze des Vektors liegt nahezu auf der roten (durchgezogenen) Linie für 8 Sekunden Wellenperiode. Es ist jedoch zu erkennen, dass auch die Linien für 6, 7 und 9
U+S Ausschuss der See-BG Stand: Mai 2003 Richtlinien für die Überwachung der Schiffsstabilität Kapitel 2: Stabilität und Rollbewegungen im Seegang
Seite 24 von 28
Sekunden in der Nähe liegen, weshalb sich immer wieder starke, resonanzähnliche Rollbe-wegungen einstellen.
Um diesen Zustand abzustellen, soll der Kurs geändert werden. Eine Kursänderung von 15° nach Steuerbord führt zwar weg von den Linien um 8 Sekunden Wellenperiode, kann aber noch resonanzähnliche Rollbewegungen mit den im Seegangsspektrum enthaltenen Wellen-komponenten von 11 bis 12 Sekunden Wellenperiode liefern.
Eine Kursänderung von 15° nach Backbord führt in einen Bereich, in dem es keine Kompo-nente im gesamten Seegangsspektrum mehr gibt, die eine Begegnungsperiode von 15 Se-kunden liefern könnte. Es ist bekannt, daß Schiffe sich mit dieser Maßnahme sehr wirksam ruhig stellen lassen, wenn es zum Beispiel darum geht, kurzzeitige Kontrollaufgaben an Deck oder in Laderäumen wahrzunehmen. Die Kursänderung nach Backbord ist daher vor-zuziehen, wenn nicht navigatorische Gründe dagegen sprechen.
Mit dieser Kursänderung nach Backbord kommt der Seegang allerdings mehr von achtern. Das ist in diesem Beispiel ohne Bedenken hinzunehmen, da die Rollzeit von 15 Sekunden bei dem ca. 20 m breiten Schiff ein GM von etwa 1,14 m und damit ausreichend Stabilität ergibt und zugleich die beobachtete Wellenperiode von 8 s einem Seegang gemäß Wind-stärke 7 entspricht. Die bekannten Gefährdungen des Schiffes in achterlichem Seegang (siehe Anlage 2) sind hier also ohne Bedeutung.
Beispiel 3:
Das Schiff hat eine Rollzeit TR von 20 Sekunden. Das zugehörige Resonanzblatt (Bild 2.9) lässt erkennen, dass alle Wellenperioden, die zu Begegnungsperioden von 20 Sekunden führen können, ein schmales Band von kritischen Fahrtvektoren für das Laufen vor achterli-cher oder schräg achterlicher See ergeben. Liegt die Spitze des Fahrtvektors in diesem Band, so muss mit besonders heftigen Resonanzerscheinungen gerechnet werden, da nicht nur die kennzeichnende Wellenperiode, sondern auch die im Seegangsspektrum benachbar-ten Perioden zu Begegnungsperioden von 20 Sekunden führen. Das Schiff fährt dann au-ßerdem mit der Gruppengeschwindigkeit der kennzeichnenden Welle, was dazu führen kann, dass es lange in einer Gruppe besonders hoher Wellen verbleibt.
Fährt das Schiff z.B. jetzt mit 17 kn genau vor der See, so werden keine Resonanzerschei-nungen zu erwarten sein. Reduziert man jedoch wegen zunehmender Wellenhöhen die Ge-schwindigkeit auf beispielsweise 14 kn, wird starke parametrische Erregung entstehen. Erst bei weiterer Reduzierung unter 11 kn kann mit einer Beruhigung des Schiffes gerechnet werden.
Die richtige Maßnahme in dieser Situation muss von der tatsächlich angetroffenen Wellenpe-riode abhängig gemacht werden. Bei Wellenperioden von über 8 s kann das Beibehalten der Geschwindigkeit von 17 kn zum Beginn des Surfens führen (siehe Anlage 2). Außerdem ist bei den dann längeren Wellen mit der möglichen Verlängerung der Rollzeiten wegen der im Durchschnitt verringerten Stabilität zu rechnen. Es sollten daher auch die Resonanzblätter für größere Rollzeiten beachtet werden. Das Zurücknehmen der Geschwindigkeit auf unter 11 kn ist dann dem Beibehalten einer hohen Geschwindigkeit unbedingt vorzuziehen.
U+S Ausschuss der See-BG Stand: Mai 2003 Richtlinien für die Überwachung der Schiffsstabilität Kapitel 2: Stabilität und Rollbewegungen im Seegang
Seite 25 von 28
Beispiel 4:
Das Schiff hat eine Rollzeit TR von 15 Sekunden und fährt gegen die See (Bild 2.8). Die kennzeichnende Wellenperiode beträgt 9 bis 10 Sekunden mit zunehmender Tendenz. We-gen der schweren See beträgt die Geschwindigkeit knapp 14 kn. Um das heftige Stampfen und Einsetzen zu verringern, soll die Geschwindigkeit weiter herabgesetzt werden. Das Re-sonanzdiagramm enthält jedoch die Warnung vor der parametrischen Erregung von Rollbe-wegungen für Fahrtstufen unter 10 kn orangefarbige (gestrichelte) Linien. Einer Kursände-rung von mindestens 30° nach Backbord oder Steuerbord ist der Vorzug zu geben.
Anfertigung von Resonanzdiagrammen
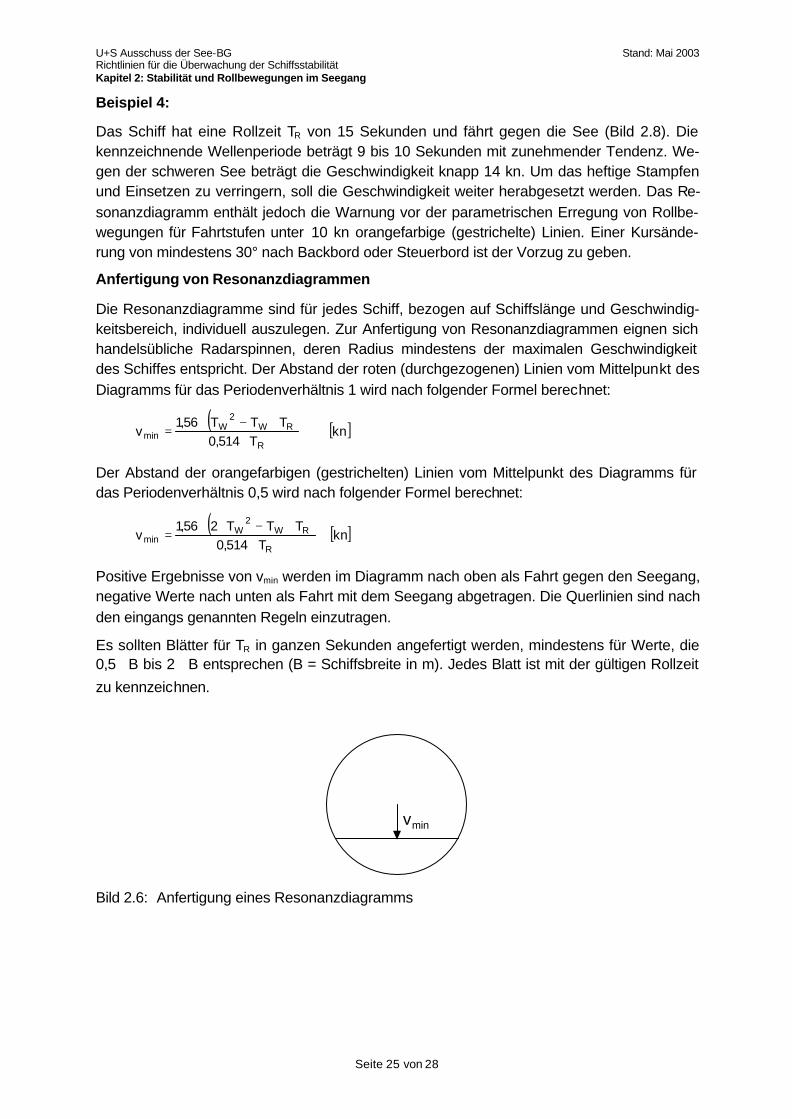
Die Resonanzdiagramme sind für jedes Schiff, bezogen auf Schiffslänge und Geschwindig-keitsbereich, individuell auszulegen. Zur Anfertigung von Resonanzdiagrammen eignen sich handelsübliche Radarspinnen, deren Radius mindestens der maximalen Geschwindigkeit des Schiffes entspricht. Der Abstand der roten (durchgezogenen) Linien vom Mittelpunkt des Diagramms für das Periodenverhältnis 1 wird nach folgender Formel berechnet:
( ) [ ]knT514,0
TTT56,1v
R
RW2
Wmin ⋅
⋅−⋅=
Der Abstand der orangefarbigen (gestrichelten) Linien vom Mittelpunkt des Diagramms für das Periodenverhältnis 0,5 wird nach folgender Formel berechnet:
( ) [ ]knT514,0
TTT256,1v
R
RW2
Wmin ⋅
⋅−⋅⋅=
Positive Ergebnisse von vmin werden im Diagramm nach oben als Fahrt gegen den Seegang, negative Werte nach unten als Fahrt mit dem Seegang abgetragen. Die Querlinien sind nach den eingangs genannten Regeln einzutragen.
Es sollten Blätter für TR in ganzen Sekunden angefertigt werden, mindestens für Werte, die 0,5 ⋅ B bis 2 ⋅ B entsprechen (B = Schiffsbreite in m). Jedes Blatt ist mit der gültigen Rollzeit
zu kennzeichnen.
vmin
Bild 2.6: Anfertigung eines Resonanzdiagramms
U+S Ausschuss der See-BG Stand: Mai 2003 Richtlinien für die Überwachung der Schiffsstabilität Kapitel 2: Stabilität und Rollbewegungen im Seegang
Seite 26 von 28
170180
150
160
130
140
120
190
100
110
200
210
220
230
240
250
260
290
280
270
300
100350340
330
320
310 50
40
30
20
60
70
80
90
16 kn
14 kn
10 kn
6 kn
4 kn
2 kn
4 kn
6 kn
8 kn
10 kn
12 kn
14 kn
16 kn
Seegangsrichtung
⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓
Diagramm zur Führung des Schiffes in schwerem Wetterfür MV. Nautilus; Lpp = 117,6 m; vmax = 17 kn
Resonanzblatt für eine Rollzeit TR von10 Sekunden
14 s
6 s
8 s
2 kn
Periodenverhältnis 1Periodenverhältnis 0,5
10 s
11 s
12 s
13 s
8 kn
9 s
8 s
6 s
7 s 7 s
12 kn
Bild 2.7

U+S Ausschuss der See-BG Stand: Mai 2003 Richtlinien für die Überwachung der Schiffsstabilität Kapitel 2: Stabilität und Rollbewegungen im Seegang
Seite 27 von 28
170180
150
160
130
140
120
190
100
110
200
210
220
230
240
250
260
290
280
270
300
100350340
330
320
310 50
40
30
20
60
70
80
90
16 kn
14 kn
12 kn
10 kn
6 kn
4 kn
2 kn
4 kn
6 kn
8 kn
10 kn
12 kn
14 kn
16 kn
Seegangsrichtung
⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓
Diagramm zur Führung des Schiffes in schwerem Wetterfür MV. Nautilus; Lpp = 117,6 m; vmax = 17 kn
Resonanzblatt für eine Rollzeit TR von15 Sekunden
14 s
6, 9 s 6, 9 s7, 8 s 7, 8 s
9 s
8 s
2 kn
11 s
10 s
Periodenverhältnis 1Periodenverhältnis 0,5
10 s
11 s
12 s
13 s
8 s
9 s
8 kn
Bild 2.8

U+S Ausschuss der See-BG Stand: Mai 2003 Richtlinien für die Überwachung der Schiffsstabilität Kapitel 2: Stabilität und Rollbewegungen im Seegang
Seite 28 von 28
170180
150
160
130
140
120
190
100
110
200
210
220
230
240
250
260
290
280
270
300
100350340
330
320
310 50
40
30
20
60
70
80
90
16 kn
14 kn
12 kn
10 kn
8 kn
6 kn
4 kn
2 kn
4 kn
6 kn
8 kn
10 kn
12 kn
14 kn
16 kn
Seegangsrichtung
⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓ ⇓
Diagramm zur Führung des Schiffes in schwerem Wetterfür MV. Nautilus; Lpp = 117,6 m; vmax = 17 kn
Resonanzblatt für eine Rollzeit TR von20 Sekunden
14 s
13 s
8, 12 s
6 s 6 s
9, 10, 11 s
7 s 7 s
12 s
14 s
13 s
9 s
8 s
2 kn
11 s
10 s
Periodenverhältnis 1Periodenverhältnis 0,5
Bild 2.9