Embed Size (px)
Citation preview

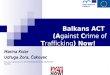
Kaskadna kompenzacija
SAU

U inženjerskoj praksi, naročito u sistemima regulacije elektromotornih pogona i tehnoloških procesa, veoma često se primenjuje metoda kaskadne kompenzacije, u čijoj osnovi su linearni zakoni upravljanja.

Kaskadna kopenzacija
W(s) +
-
W(s) Gk(s)
Nekompenzovani SAU
Kompenzovani SAU
+
-

Pojačavač
Prenosna funkcija pojačavača;
Gk(s)=K (K je realan broj).
s=jw
Gk(jw)=K; Im(Gk(jw))=0,
Wk(s)=W(s) Gk(s)=K W(s)

Pojačavač - osobine
lim(Wk(s)) = K*lim(W(s))
za K>1:
• povećava se konstanta greške SAU, a to znači da mu se smanjuje greška ustaljenog stanja (ess), tj. SAU ima bolje ustaljeno stanje
• SAU postaje nestabilniji jer mu se pretek faze i pretek pojačanja smanjuju, tj. sistem ima lošije prelazno stanje

Pojačavač - osobine
lim(Wk(s)) = K*lim(W(s))
za 0<K<1:
• smanjuje se konstanta greške SAU, a to znači da mu se povećava greška ustaljenog stanja (ess), tj. SAU ima lošije ustaljeno stanje
• SAU postaje stabilniji jer mu se pretek faze i pretek pojačanja povečava, tj. sistem ima bolje prelazno stanje

Pojačavač - primjer
SAU je dat f-jom povratnog prenosa:
• Odrediti karakteristične vrijednosti SAU-a (Kv,
Pm, Gm, Wp, Wg)
• Simulirati odziv sistema na step f-ju
• Kompenzovati sistem tako da Kv=10 sec-1
• Odrediti karakteristične vrijednosti
kompenzovanog SAU-a
• Simulirati odziv kompenzovanog sistema na step
f-ju
)7)(15,0)(1(
)3()(
ssss
ssW

Pojačavač - primjer
SAU je dat f-jom povratnog prenosa:
• Kompenzovati sistem pojačavačem tako da SAU
bude na granici stabilnosti.
• Odrediti karakteristične vrijednosti i simulirati
odziv kompenzovanog sistema na step f-ju
• Za koju vrijednost pojačavača će kompenzovani
SAU imati pretek faze 30±5o
• Odrediti karakteristične vrijednosti i simulirati
odziv kompenzovanog sistema na step f-ju
)7)(15,0)(1(
)3()(
ssss
ssW

Pojačavač - primjer
SAU je dat f-jom povratnog prenosa:
• Za koju vrijednost pojačavača će
kompenzovani SAU imati pretek
pojačanja 10±1 dB
• Odrediti karakteristične vrijednosti i
simulirati odziv kompenzovanog sistema na
step f-ju
)7)(15,0)(1(
)3()(
ssss
ssW

Pojačavač - primjer
SAU je dat f-jom povratnog prenosa:
• Za koju vrijednost pojačavača će
kompenzovani SAU imati propusni
opseg w=1,5 rad/sec
• Odrediti karakteristične vrijednosti i
simulirati odziv kompenzovanog sistema na
step f-ju
)7)(15,0)(1(
)3()(
ssss
ssW

Pojačavač - primjer
Zadati dio sistema automatskog upravljanja opisan je prenosnom funkcijom:
• Za koju vrijednost pojačanja
pojačavača K će sistem biti na granici
stabilnosti?
• Odrediti karakteristične vrijednosti i
simulirati odziv kompenzovanog sistema na
step f-ju

Integralni kompenzator
Prenosna funkcija integralnog kompenzatora (nisko-propusnog filtera) je:
, a<b
1/
1/)(
as
bssGi

Integralni kompenzator
a/b = 0,1
b=ω*γ/10
-As=20log(a/b)
ili
a=b*10 –(As/20)

Integralni kompenzator
• Povećava stabilnost jer povećava pretekle
faze i pojačanja smanjenjem propusnog
opsega, tj. popravlja prelazni proces
• ne utiče na konstantu greške, tj. ustraljeno
stanje jer je lim(Gi(s)) =1

Primjer 1 Zadati dio sistema automatskog upravljanja opisan
je prenosnom funkcijom: .
– Izvršiti sintezu kaskadnog kompenzatora u
direktnoj grani tako da kompenzovani sistem
zadovoljava: Kv=15 sec -1; (Pm)=30±5º.
– Prikazati Bodeove dijagrame nekompenzovanog i
kompenzovanog sistema kao i prenosnu funkciju
kompenzatora.
– Simulirati step odziv datog zatvorenog sistema
bez i sa kompenzatorom.
)525)(1(
)4(10)(
2
ssss
ssW

Primjer 2 Zadati dio sistema automatskog upravljanja opisan
je prenosnom funkcijom: .
– izvršiti sintezu kaskadnog kompenzatora u
direktnoj grani tako da kompenzovani sistem
zadovoljava: Kv=10 sec -1; a(G)=10dB±1dB.
– Prikazati Bodeove dijagrame nekompenzovanog i
kompenzovanog sistema kao i prenosnu funkciju
kompenzatora.
– Simulirati step odziv datog zatvorenog sistema
bez i sa kompenzatorom,
)525)(1(
)4(10)(
2
ssss
ssW

Diferencijalni kompenzator
Prenosna funkcija diferencijalnog kompenzatora je:
, a<b
bs
assGd
)(

Diferencijalni kompenzator
Grafik za a/b=0,1
ω*m=√ab
Φ=90o-2arctg √a/b
ΦMAX=54,9o

Diferencijalni kompenzator
• Povećava stabilnost ako se podesi ω*m da
povećava pretek faze ali neznatno
povećava i propusnog opsega, dakle može
da popravlja prelazni proces
• utiče na konstantu greške, tj. ustraljeno
stanje ali se to može kompenzovati
pojačanjem b/a

Višestruki diferencijalni
kompenzator
• Ako je potrebno izvršiti povećenje faze za
više od ΦMAX=54,9o onda se koristi
višestruki diferencijalni kompenzator, a
računaju se parametri jednog

Primjer 1
Funkcija prenosa sistema je: .
Projektovati redni kompenzator tako da
budu zadovoljeni sljedeći zahtjevi: 30o i
w≈10 rad/sec.
)15)(4)(3(
2500)(
ssssW

Diferencijalno-integralni
kompenzator
Kombinacijom diferencijalnog i integralnog
komprenzatora kao i pojačavača se može
izvršiti kaskadna kompenzacija SAU-a za
bilo koje uslove
Redosled kompenzacije:
1. Pojačavač
2. Diferencijalni kompenzator
3. Integralni kompenzator

Primjer 1
Funkcija prenosa sistema je: .
Projektovati redni kompenzator tako da
budu zadovoljeni sljedeći zahtjevi: : Kp=50
sec-1, 30o i w≈10 rad/sec.
)15)(4)(3(
2500)(
ssssW