Embed Size (px)
Citation preview

KESTABILAN MODEL MANGSA PEMANGSA DENGAN FUNGSI RESPON TIPE HOLLING II DAN WAKTU TUNDA
STABILITY OF PREDATOR PREY MODEL WITH
HOLLING TYPE II FUNCTIONAL RESPONSE AND TIME DELAY
Budyanita Asrun, Syamsuddin Toaha, Moh. Ivan Azis
Bagian Matematika Terapan, Fakultas Matematika dan Ilmu Pengetahuan Alam, Universitas Hasanuddin.
Alamat Koresponden: Budyanita Asrun Program Pascasarjana Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Hasanuddin Makassar, 90245 HP: 087841913120 Email: [email protected]

ABSTRAK Dalam tulisan ini, dibahas model mangsa pemangsa yang telah dimodifikasi dari model dasar Lotka
Volterra dengan penambahan fungsi respon Tipe Holling II pada interaksi antara populasi mangsa dan pemangsa, serta pemberian waktu tunda pada laju pertumbuhan pemangsa. Penelitian ini bertujuan untuk mengetahui pengaruh waktu tunda pada kestabilan titik keseimbangan model mangsa pemangsa dengan fungsi respon tipe Holling II. Hasil penelitian menunjukkan bahwa dari model mangsa pemangsa dengan fungsi respon tipe Holling II diperoleh tiga titik keseimbangan, yaitu 퐸 = (0,0), 퐸 = ( , 0) dan
퐸 = , ( )( )
. Dari hasil analisis diperoleh dua titik keseimbangan yang dapat stabil pada kondisi
syarat tertentu, yaitu titik keseimbangan 퐸 = ( , 0) stabil jika 푎푑 − 휀푐 − 훼푎푐 < 0 dan titik keseimbangan
퐸 = , ( )( )
stabil jika 휀푑 − 훼푎푑 + 훼휀푐 + 훼 푎푐 > 0. Waktu tunda dapat mempengaruhi kestabilan titik keseimbangan 퐸 dari stabil menjadi tidak stabil. Kata Kunci : Mangsa Pemangsa, Lotka Volterra , Fungsi Respon Tipe Holling II, Waktu Tunda ABSTRACT
In this paper, we discussed of the predator prey models that have been modified from the base model of Lotka Volterra with the addition Holling type II response function in the interaction between prey and predator populations, as well as giving the time delay in the growth rate of the predator. The research aimed to investigate the effect time delay on the stability of an equilibrium point in the predator prey model with Holling type II functional response. The research result indicates that the predator prey model with Holling type II functional response is obtained three equilibrium points, i.e. 퐸 = (0,0), 퐸 = ( , 0) and
퐸 = , ( )( )
. The stability analysis is obtained two equilibrium points which can be stable on the
certain condition, i.e. the equilibrium point 퐸 = ( , 0) is stable if 푎푑 − 휀푐 − 훼푎푐 < 0 and the equilibrium
point 퐸 = , ( )( )
is stable if 휀푑 − 훼푎푑 + 훼휀푐 + 훼 푎푐 > 0. The delay time can affect the stability on the equilibrium point 퐸 from stable to unstable.
Key Word : Predator Prey, Lotka Volterra, Holling Type II Functional Response, Time Delay
PENDAHULUAN
Model mangsa pemangsa yang paling terkenal dinamai setelah dua ilmuwan, Alfred
Lotka dan Vito Volterra memperkenalkannya pada tahun 1926. Asumsi dasar dari model
mangsa pemangsa Lotka Volterra klasik adalah bahwa setiap populasi mengalami
pertumbuhan atau peluruhan eksponensial dalam ketiadaan yang lain. Kemudian model
mangsa pemangsa Lotka Volterra dimodifikasi dengan menambahkan asumsi bahwa jumlah
populasi juga dipengaruhi oleh adanya tingkat kompetisi didalam populasi tersebut (Olinick,
2006).
Salah satu pengembangan lain dari model Lotka Volterra adalah model yang
dilakukan oleh Ruan dkk (2001), Liu dkk (2002), serta Tian dkk (2011), dimana dalam
model Lotka Voltera diberikan penambahan fungsi respon tipe Holling II pada interaksi
antara mangsa dan pemangsa. Kemudian untuk membangun model yang lebih realistis Beretta
dkk (1996) dan Ruan (2009) mempertimbangkan waktu tunda (delays) untuk jangka respon
pemangsa terhadap mangsa. Penambahan jumlah populasi pemangsa diperlukan adanya
waktu tunda, hal ini diasumsikan bahwa penggunaan waktu tunda pada sistem tersebut
disebabkan karena adanya waktu yang diperlukan populasi pemangsa dalam memangsa
mangsanya. Kemudian Teng dkk (2011) juga melakukan hal yang sama memberikan waktu
tunda pada fungsi respon tipe Holling II pada kompartemen yang sama. Tujuan penelitian ini
adalah untuk mengetahui pengaruh waktu tunda pada kestabilan titik keseimbangan model
mangsa pemangsa dengan fungsi respon tipe Holling II.
BAHAN DAN METODE
Secara umum desain penelitian yang dilakukan adalah menentukan titik keseimbangan
model, melinearisasi model, menganalisis kestabilan dari titik keseimbangan, kemudian
melakukan simulasi numerik. Adapun variabel penelitian adalah sejauh mana pengaruh waktu
tunda terhadap kestabilan dari suatu titik keseimbangan baik secara analitik maupun numerik.
Kemudian software komputasi yang digunakan pada penelitian ini adalah dengan
menggunakan Maple dan Matlab.
HASIL
Model mangsa pemangsa dengan fungsi respon tipe Holling II dan waktu tunda yang
telah linearisasi disekitar titik keseimbangan 퐸∗

X(푡) = 푎 − 2휀푥∗ −푏푦∗
(1 + 훼푥∗) X(t)−푏푥∗
(1 + 훼푥∗) Y(t),
Y(푡) =푑푦∗
(1 + 훼푥∗) X(t− τ) + −푐 +푑푥∗
(1 + 훼푥∗) Y(t),
Dari model mangsa pemangsa dengan fungsi respon tipe Holling II diperoleh tiga titik
keseimbangan, yaitu 퐸 = (0,0), 퐸 = ( , 0) dan 퐸 = , ( )( )
. Dari hasil
analisis diperoleh dua titik keseimbangan yang dapat stabil pada kondisi syarat tertentu, yaitu
titik keseimbangan 퐸 = ( , 0) stabil jika 푎푑 − 휀푐 − 훼푎푐 < 0 dan titik keseimbangan
퐸 = , ( )( )
stabil jika 휀푑 − 훼푎푑 + 훼휀푐 + 훼 푎푐 > 0. Dengan pemberian
waktu tunda diperoleh nilai 휏 > 0 yang dapat mengubah kestabilan dari titik keseimbangan
퐸 , ( )( )
dari stabil menjadi tidak stabil.
Analisis pada titik keseimbangan 퐸 . Untuk 휏 = 0, dengan mensubstitusi titik
keseimbangan 퐸 , maka diperoleh persamaan karakteristik
휆 +(휀푑 − 훼푎푑 + 훼휀푐 + 훼 푎푐)푐
푑(푑 − 훼푐) 휆 +(푎푑 − 휀푐 − 훼푎푐)푐
푑 = 0,
dimana bagian real dari nilai eigen akan bernilai negatif dan disimpulkan stabil jika dan hanya
jika
휀푑 − 훼푎푑 + 훼휀푐 + 훼 푎푐 > 0.
Untuk 휏 ≠ 0, misalkan 휆 = 푖푤, 푤 > 0 adalah akar-akar persamaan karakteristik,
maka diperoleh persamaan karakteristik
푤 +(휀푑 − 훼푎푑 + 훼휀푐 + 훼 푎푐)푐
푑(푑 − 훼푐) 푤 −(푎푑 − 휀푐 − 훼푎푐)푐
푑 = 0,
Hasil analisis menunjukkan bahwa dengan menggunakan aturan tanda Descartes
persamaan polinomial 푤 diatas akan menghasilkan satu akar real positif. Selanjutnya dapat
diperoleh nilai 휏 > 0 yang dapat mempengaruhi kestabilan dari titik kesetimbangan tersebut.
Simulasi dilakukan menggunakan nilai parameter yang diberikan oleh Xio dkk (2011),
yaitu 푎 = 1.2,푏 = 0.1, 푐 = 0.2,푑 = 0.4, 휀 = 0.6 dan 훼 = 0.1. Gambar 1,2,3,4,dan 5
memperlihatkan pengaruh waktu tunda terhadap kestabilan titik keseimbangan 퐸 dari kondisi
stabil menjadi tidak stabil.

PEMBAHASAN
Penelitian menunjukkan bahwa kestabilan dari model ditentukan dari beberapa syarat
kondisi. Sementara pemberian waktu tunda karena mempertimbangkan adanya waktu yang
diperlukan populasi pemangsa dalam memangsa mangsanya membuat penambahan jumlah
populasi pemangsa akibat proses predasi mengalami penundaan waktu dapat memberikan
pengaruh terhadap kestabilan dari suatu titik keseimbangan.
Misal 푥 = 푥(푡) dan 푦 = 푦(푡) menyatakan jumlah populasi mangsa dan pemangsa
pada waktu t, model mangsa pemangsa Lotka Volterra klasik sebagai berikut
푥 = 푎푥 − 푏푥푦,
푦 = 푑푥푦 − 푐푦,(1)
dimana 푎 adalah laju kelahiran mangsa, 푏 laju kematian mangsa akibat predasi, 푑 laju
pertumbuhan pemangsa akibat predasi,푐 adalah laju kematian alami pemangsa.
Dengan menambahkan asumsi adanya kompetisi dalam populasi mangsa yang dapat
mempengaruhi laju perubahan jumlah populasi mangsa, maka model (1) menjadi
푥 = 푥(푎 − 휀푥 − 푏푦),
푦 = 푑푥푦 − 푐푦,(2)
kemudian pemberian fungsi respon tipe Holling II pada interaksi populasi, selanjutnya model
(2) menjadi
푥 = 푥 푎 − 휀푥 −푏푦
1 + 훼푥 ,
푦 = 푦 −푐 +푑푥
1 + 훼푥 .(3) Sekarang dengan mempertimbangkan waktu tunda maka model (3) , dapat ditulis
푥(푡) = 푥(푡) 푎 − 휀푥(푡) −푏푦(푡)
1 + 훼푥(푡) ,
푦(푡) = 푦(푡) −푐 +푑푥(푡 − 휏)
1 + 훼푥(푡 − 휏) .(4)
Dengan melinearisasi model (4) disekitar titik keseimbangan 퐸∗, misalkan
X(t) = 푥(푡)− 푥∗ danY(t) = 푦(푡)− 푦∗. Maka diperoleh model linarisasi
X(푡) = 푎 − 2휀푥∗ −푏푦∗
(1 + 훼푥∗) X(t) −푏푥∗
(1 + 훼푥∗) Y(t),
Y(푡) =푑푦∗
(1 + 훼푥∗) X(t− τ) + −푐 +푑푥∗
(1 + 훼푥∗) Y(t).(5)

Dari model yang telah dilenearisasi diperoleh persamaan karakteristik
Δ(휆, 휏) = 휆 + 푎1휆 + 퐞 푎2 + 푎3 = 0, (7)
dimana
푎1 = −푑푥∗
(1 + 훼푥∗) + 푐 − 푎 + 2휀푥∗ +푏푦∗
(1 + 훼푥∗) ,
푎2 =푏푑푥∗푦∗
(1 + 훼푥∗) ,
푎3 =푎푑푥∗
(1 + 훼푥∗)− 푎푐 −2휀푑푥∗
(1 + 훼푥∗) + 2휀푐푥∗ −푏푑푥∗푦∗
(1 + 훼푥∗)
+푏푐푦∗
(1 + 훼푥∗) .
Untuk 휏 = 0, maka persamaan karakteristik (7) menjadi 휆 + 푎1휆 + (푎2 + 푎3) = 0,
Menurut Routh-Hurwitz nilai eigen dari persamaan karakteristik akan bernilai real dan
negatif atau kompleks dengan bagian real negatif jika dan hanya jika
푎1 > 0 dan (푎2 + 푎3) > 0. (8)
Selanjutnya untuk 휏 ≠ 0, misalkan 휆 = 푖푤, 푤 > 0 adalah akar-akar persamaan
karakteristik persamaan (7) , maka diperoleh
−푤 + 푎1푖푤 + 푎3 + 푎2푐표푠(푤휏)− 푎2푖푠푖푛(푤휏) = 0,
memisahkan bagian real dengan bagian imajiner, maka diperoleh
−푤 + 푎3 + 푎2푐표푠(푤휏) = 0, 푎1푤 − 푎2푠푖푛(푤휏) = 0,
atau
−푤 + 푎3 = −푎2푐표푠(푤휏),
푎1푤 = 푎2푠푖푛(푤휏).(9)
Dengan mengkuadratkan masing-masing ruas, sehingga persamaan (9) menjadi
푤 − 2푤 푎3 + 푎3 = 푎2 푐표푠 (푤휏),
푎1 푤 = 푎2 푠푖푛 (푤휏),
serta menggabungkan persamaan tersebut, maka diperoleh polinomial derajat empat
푤 + (푎1 − 2푎3)푤 + (푎3 − 푎2 ) = 0,(10)
sehingga diperoleh,
푤± =12 {−(푎1 − 2푎3) ± (푎1 − 2푎3) − 4(푎3 − 푎2 )}.(11)

Teorema 1 (Kar,2003).
Syarat kondisi perlu dan cukup untuk titik keseimbangan (푥∗,푦∗) menjadi stabil asimptotik
untuk semua 휏 ≥ 0 adalah sebagai berikut.
(1) Bagian real untuk setiap akar-akar dari Δ(휆, 0) = 0adalah negatif.
(2) Untuk setiap real 푤 dan 휏 ≥ 0 , Δ(푖푤, 휏) ≠ 0 , dimana 푖 = √−1.
Teorema 2 (Kar,2003).
Jika kondisi (8) dan teorema 1 terpenuhi lalu persamaan (10) tidak mempunyai akar real
positif, maka titik keseimbangan (푥∗,푦∗) adalah stabil asimptotik untuk 휏 ≥ 0.
Untuk mengetahui kemungkinan adanya akar real positif dari (10), digunakan aturan
tanda Descartes yang dinyatakan sebagai berikut:
Misalkan 푝(푚) = 푎 푚 + 푎 푚 + 푎 푚 + ⋯+ 푎 푚 merupakan polinomial derajat n
dengan koefisien real 푎 , dan 푏 adalah bilangan bulat yang memenuhi
0 ≤ 푏 < 푏 < ⋯ < 푏 . Maka banyaknya akar real positif dari 푝(푚) sama dengan
banyaknya variasi tanda dari koefisien polinomialnya 푎 , 푎 , … ,푎 ( Wang, 2004 ).
Selanjutnya dengan mensubstitusi persamaan 푤± ke persamaan (9), maka diperoleh
nilai 휏
휏 =1푤±
arctan푎1푤±
푤± − 푎3+
2푘휋푤±
,푘 = 0,1,2, . … (12)
Dibawah ini akan dianalisis titik keseimbangan yang dapat stabil pada saat 휏 = 0 atau
memenuhi persamaan (8), dan akan dianalisis adakah nilai 휏 > 0 yang dapat mengubah
kestabilan dari titik keseimbangan tersebut.
Analisis Kestabilan Pada Titik Keseimbangan 푬ퟏ 풂휺
,ퟎ
Untuk 휏 = 0, dari persamaan karakteristik (7) dengan mensubstitusi titik
keseimbangan 퐸 , maka diperoleh persamaan karakteristik
휆 + 푎 − 휆 + −푎 = 0, dimana Menurut kriteria Routh-
Hurwitz bagian real dari nilai eigen akan bernilai negatif dan disimpulkan stabil jika dan
hanya jika 푎푑 − 휀푐 − 훼푎푐 < 0.
Selanjutnya untuk 휏 ≠ 0, misalkan 휆 = 푖푤, 푤 > 0 adalah akar-akar persamaan
karakteristik persamaan (7) , dengan menggunakan persamaan (10) , maka diperoleh

푤 + (푎1 − 2푎3)푤 + (푎3 − 푎2 ) = 0,
dimana
(푎1 − 2푎3) = 푎 −푎푑 − 휀푐 − 훼푎푐
휀 + 훼푎 − 2 −푎푎푑 − 휀푐 − 훼푎푐
휀 + 훼푎
=(푎푑 − 휀푐 − 훼푎푐) + 푎 휀 + 훼 푎 + 2훼푎 휀
(휀 + 훼푎) > 0,
(푎3 − 푎2 ) = −푎푎푑 − 휀푐 − 훼푎푐
휀 + 훼푎 − 0 = −푎푎푑 − 휀푐 − 훼푎푐
휀 + 훼푎 > 0,
karena (푎1 − 2푎3) > 0 dan (푎3 − 푎2 ) > 0.(13)
Menurut aturan tanda Descartes, persamaan (10) akan memiliki paling tidak satu akar
real positif jika variasi perubahan tanda koefisien polinomnya lebih dari satu atau sama
dengan satu. Dalam hal ini akan ditinjau bahwa (푎1 − 2푎3) dan (푎3 − 푎2 ) memiliki
tanda yang berbeda. Karena dari persamaan (13) diperoleh (푎1 − 2푎3) > 0 dan
(푎3 − 푎2 ) > 0menyebabkan persamaan polinomial (10) tidak memiliki variasi perubahan
tanda koefisien, sehingga persamaan (10) tidak memiliki akar real positif. Dengan demikian
tidak diperoleh nilai 휏 > 0 yang dapat mengubah kestabilan titik keseimbangan 퐸 atau
dengan kata lain titik keseimbangan 퐸 stabil untuk ≥ 0 .
Analisis Kestabilan Pada Titik Keseimbangan 푬ퟐ 풄
풅 휶풄, (풂풅 휺풄 휶풂풄)풅
풃(풅 휶풄)ퟐ
Titik keseimbangan 퐸 akan berada pada kuadran pertama, jika 푑 − 훼푐 > 0 dan
(푎푑 − 휀푐 − 훼푎푐) > 0. Untuk 휏 = 0, dari persamaan karakteristik (7) dengan mensubstitusi
titik keseimbangan 퐸 , maka diperoleh persamaan karakteristik
휆 + ( )( )
휆 + ( ) = 0, dimana bagian real dari nilai eigen akan
bernilai negatif dan disimpulkan stabil jika dan hanya jika 휀푑 − 훼푎푑 + 훼휀푐 + 훼 푎푐 > 0.
Selanjutnya untuk 휏 ≠ 0, misalkan 휆 = 푖푤, 푤 > 0 adalah akar-akar persamaan
karakteristik persamaan (7) , dengan menggunakan persamaan (10) , maka diperoleh
푤 + (푎1 − 2푎3)푤 + (푎3 − 푎2 ) = 0,
dimana
(푎1 − 2푎3) =(휀푑 − 훼푎푑 + 훼휀푐 + 훼 푎푐)푐
푑(푑 − 훼푐) > 0,

(푎3 − 푎2 ) = −(푎푑 − 휀푐 − 훼푎푐)푐
푑 < 0. karena
(푎1 − 2푎3) > 0 dan (푎3 − 푎2 ) < 0.(14)
Menurut aturan tanda Descartes, persamaan (10) akan memiliki paling tidak satu akar
real positif jika variasi perubahan tanda koefisien polinomnya lebih dari satu. Dalam hal ini
akan ditinjau bahwa (푎1 − 2푎3) dan (푎3 − 푎2 ) memiliki tanda yang berbeda. Karena dari
(14) diperoleh (푎1 − 2푎3) > 0 dan (푎3 − 푎2 ) < 0 sehingga persamaan karakteristik 푤
diatas memiliki 푤 satu akar real positif atau solusi unik positif. Sehingga dengan
mensubstitusi 푤 ke persamaan (12) untuk mendapatkan 휏, maka diperoleh
휏 =1푤 푎푟푐푡푎푛
푎1푤푤 − 푎3
+2푛휋푤 , 푛 = 0,1,2,3, …
selanjutnya mendifferensialkan persamaan (7) terhadap 휏, diiperoleh
2휆 + 푎1 − 휏푎2푒 푑휆푑휏 = 휆푎2푒 ,(15)
sehingga
푑휆푑휏 =
2휆 + 푎1휆푎2푒 −
휏휆,
dari persamaan (7), diketahui 푒 = − ,maka diperoleh
푑휆푑휏 =
2휆 + 푎1−휆(휆 + 푎1휆 + 푎3) −
휏휆 ,(16)
sehingga,
푠푖푔푛푑(푅푒휆)푑휏 = 푠푖푔푛 푅푒
푑휆푑휏
= 푠푖푔푛푎1 + 2푤 − 2푎3
푎1 푤 + (푤 − 2푎3푤 + 푎3 )) ,
dari persamaan (10), telah diketahui bahwa
푤 − 2푎3푤 + 푎3 = −푎1 푤 + 푎2
maka diperoleh
푠푖푔푛푑(푅푒휆)푑휏 = 푠푖푔푛
2푤 + 푎1 − 2푎3푎2 .(17)
Teorema 3 (Kar,2003).
Jika persamaan (8) dan (14) terpenuhi, maka titik ekuilibrium (푥∗,푦∗) adalah stabil
asimptotik untuk 휏 < 휏 dan tidak stabil untuk 휏 > 휏 , dan di titik (푥∗,푦∗) akan terjadi
bifurkasi ( solusi periodik amplitudo kecil ), pada saat 휏 = 휏 dimana 푛 = 0.
Bukti :
Untuk 휏 = 0, (푥∗,푦∗) adalah stabil asimptotik jika kondisi (4.6) terpenuhi. Karena
(푥∗,푦∗) akan stabil untuk 휏 < 휏 . Maka akan ditunjukkan bahwa
푑(푅푒휆)푑휏 ,
> 0,(18)
Ini akan menunjukkan bahwa terdapat setidaknya satu nilai eigen dengan bagian real
positif untuk 휏 > 휏 . Dari persamaan (17) dan (11) dapat dituliskan
푠푖푔푛푑(푅푒휆)푑휏 = 푠푖푔푛
2푤 + 푎1 − 2푎3푎2
= 푠푖푔푛(푎1 − 2푎3) − 4(푎3 − 푎2 )
푎2 ,
sehingga 푑(푅푒휆)푑휏 ,
> 0.
Oleh karena itu, kondisi transversability terpenuhi dan karenanya terjadi bifurkasi di
휏 = 휏 ,푤 = 푤 .
Simulasi Numerik
Simulasi dilakukan menggunakan nilai parameter yang diberikan oleh Xio dkk (2011),
yaitu 푎 = 1.2,푏 = 0.1, 푐 = 0.2,푑 = 0.4, 휀 = 0.6 dan 훼 = 0.1 serta dengan menggunakan
syarat awal, yaitu
푥(0) = 0.55 dan 푦(0) = 10
Pada saat 휏 = 0 diperoleh bahwa sistem akan stabil asimptotik pada titik
keseimbangan 퐸 = (0.5263157894, 9.307479224), dengan 푤 = 0.3675898607dan
휏 = 1.731007353. Dimana titik 퐸 akan stabil asimptotik di 휏 < 휏 dan tidak stabil pada
saat 휏 > 휏 , dan mengalami solusi periodik bifurkasi di 휏 = 휏 .
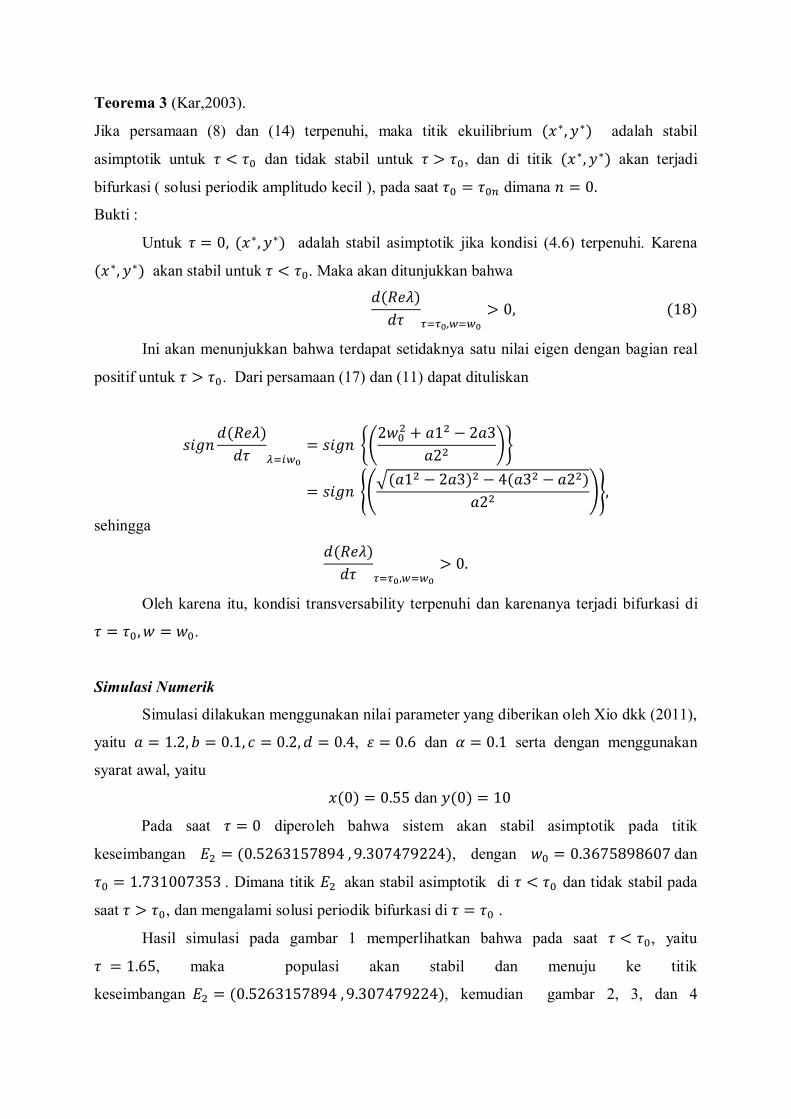
Hasil simulasi pada gambar 1 memperlihatkan bahwa pada saat 휏 < 휏 , yaitu
휏 = 1.65, maka populasi akan stabil dan menuju ke titik
keseimbangan퐸 = (0.5263157894, 9.307479224), kemudian gambar 2, 3, dan 4

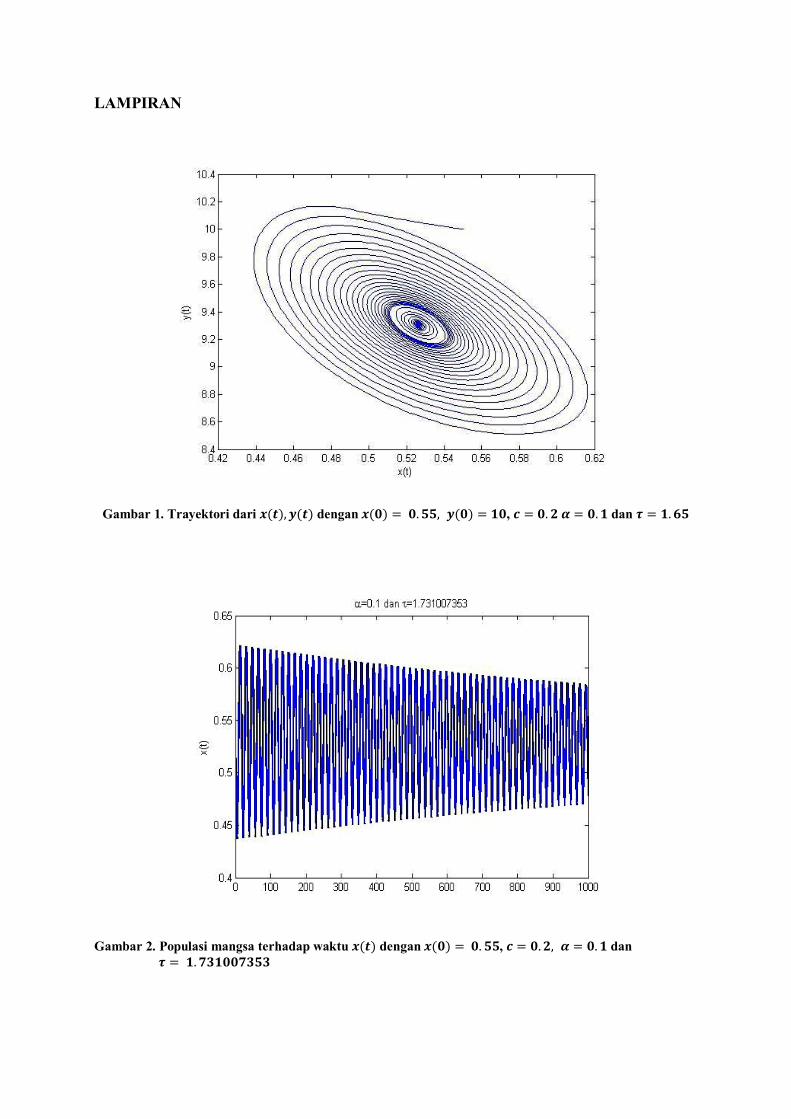
memperlihatkan bahwa pada saat 휏 = 휏 , yaitu 휏 = 휏 = 1.731007353, maka terjadi
bifurkasi solusi periodik disekitar titik keseimbangan퐸 = (0.5263157894, 9.307479224).
Sedangkan pada gambar 5 terlihat bahwa pada saat 휏 > 휏 , yaitu 휏 = 1.8, maka populasi
tidak stabil dan menjahui titik keseimbangan 퐸 = (0.5263157894, 9.307479224).
KESIMPULAN
Dari model mangsa pemangsa dengan fungsi respon tipe Holling II diperoleh tiga titik
keseimbangan, yaitu 퐸 = (0,0), 퐸 = ( , 0) dan 퐸 = , ( )( )
. Dari hasil
analisis diperoleh dua titik keseimbangan yang dapat stabil pada kondisi syarat tertentu,
yaitu titik keseimbangan 퐸 = ( , 0) stabil jika 푎푑 − 휀푐 − 훼푎푐 < 0 dan titik keseimbangan
퐸 = , ( )( )
stabil jika 휀푑 − 훼푎푑 + 훼휀푐 + 훼 푎푐 > 0. Sedangkan dengan
pemberian waktu tunda diperoleh nilai 휏 > 0 yang dapat mengubah kestabilan dari titik
keseimbangan 퐸 , ( )( )
dari stabil menjadi tidak stabil. Diharapkan pada
penelitian berikutnya model yang ditinjau lebih dikembangkan dengan menambah berbagai
macam pertimbangan asumsi agar mendekati fenomena realistis kehidupan, serta model yang
melibatkan fungsi respon, yang saat ini berkembang dengan model tipe Holling III dan IV.
DAFTAR PUSTAKA
Beretta, E., dan Kuang, Y. 1996. Convergence Results in a Well-Known Delayed Predator-Prey System. J. Math. Anal. 204: 840-853.
Kar,T.K. 2003. Selective Harvesting in a Prey Predator Fishery With Time Delay. Mathematical And Computer Modelling.38:449-458.
Liu, X., dan Chen, L. 2003. Complex Dynamics of Holling Type II Lotka-Volterra Predator-Prey System with Impulsive Perturbations on the Predator. Chaos, Solutions and Fractals. 16: 311-320.
Olinick, M. 2006. Modeling the Predator-Prey Relationship. MAA Session on Environmental Mathematics.
Ruan, S. 2009. On Nonlinear Dynamics of Predator-Prey Models with Discrete Delay. Math. Model. Nat. Phenom. 4:140-188.
Ruan, S., dan Xiao, D. 2001. Global Analysis in a Predator-Prey System with Nonmonotonic Functional Response. SIAM J. Appl. Math. Vol. 61, No. 4, pp:1445–1472.
Teng,Y., Li, S., Shi, J., Li, D., dan Zhang, X. 2011. Bifurcation in a Predator-prey Model with Time Delay and Stocking Rate. Chinese Control and Decision Conference.
Tian, X., dan Xu, R. 2011. Global Dynamics Of A Predator Prey System with Holling Type II Functional Response. Modelling and Control. 16 : 242–253.
Wang, X. 2004. A Simple Proof of Descartes's Rule of Signs. JSTOR. 111: 525-526.

Zhang, X., Xu, R., dan Gan, Q. 2011.Periodic Solution in a Delayed Predator Prey Model with Holling Type III Functional Response and Harvesting Term. World Journal of Modelling and Simulation. 7: 70-80
LAMPIRAN
Gambar 1. Trayektori dari 풙(풕),풚(풕) dengan 풙(ퟎ) = ퟎ.ퟓퟓ, 풚(ퟎ) = ퟏퟎ, 풄 = ퟎ.ퟐ휶 = ퟎ.ퟏdan 흉 = ퟏ.ퟔퟓ
Gambar 2. Populasi mangsa terhadap waktu 풙(풕) dengan 풙(ퟎ) = ퟎ.ퟓퟓ, 풄 = ퟎ.ퟐ, 휶 = ퟎ.ퟏdan 흉 = ퟏ.ퟕퟑퟏퟎퟎퟕퟑퟓퟑ
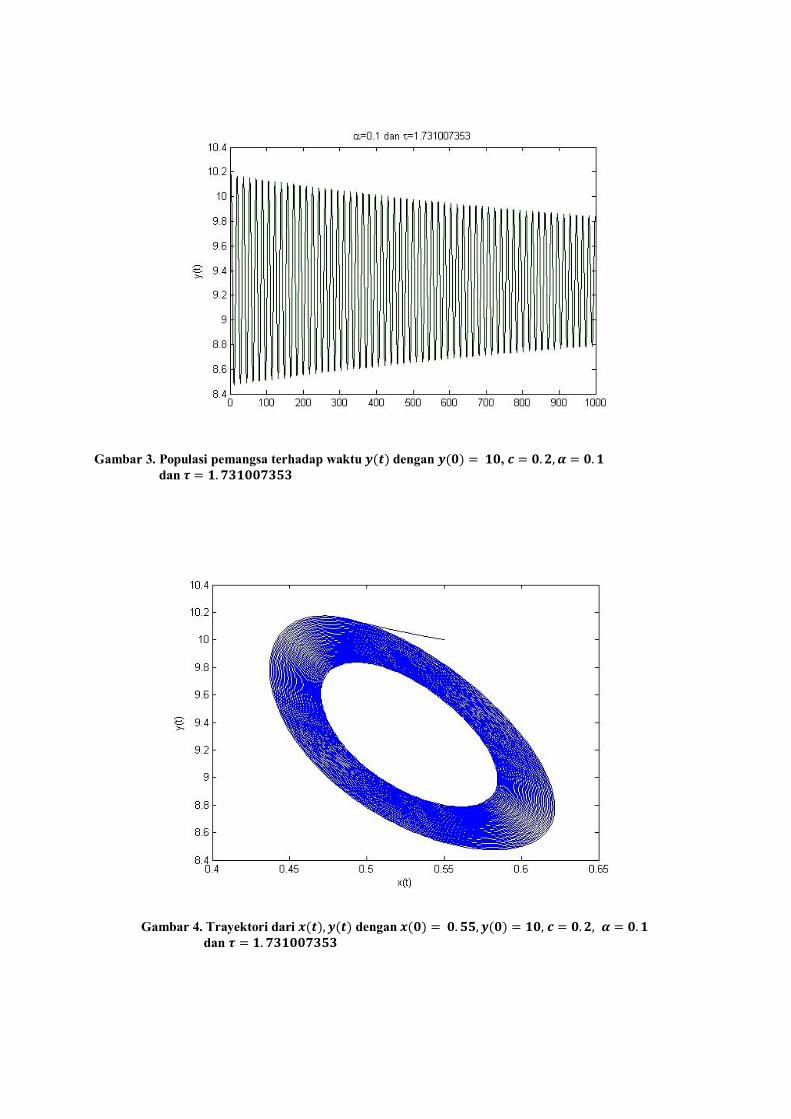
Gambar 3. Populasi pemangsa terhadap waktu 풚(풕) dengan 풚(ퟎ) = ퟏퟎ, 풄 = ퟎ.ퟐ,휶 = ퟎ.ퟏ dan 흉 = ퟏ.ퟕퟑퟏퟎퟎퟕퟑퟓퟑ
Gambar 4. Trayektori dari 풙(풕),풚(풕) dengan 풙(ퟎ) = ퟎ.ퟓퟓ,풚(ퟎ) = ퟏퟎ, 풄 = ퟎ.ퟐ, 휶 = ퟎ.ퟏ dan 흉 = ퟏ.ퟕퟑퟏퟎퟎퟕퟑퟓퟑ
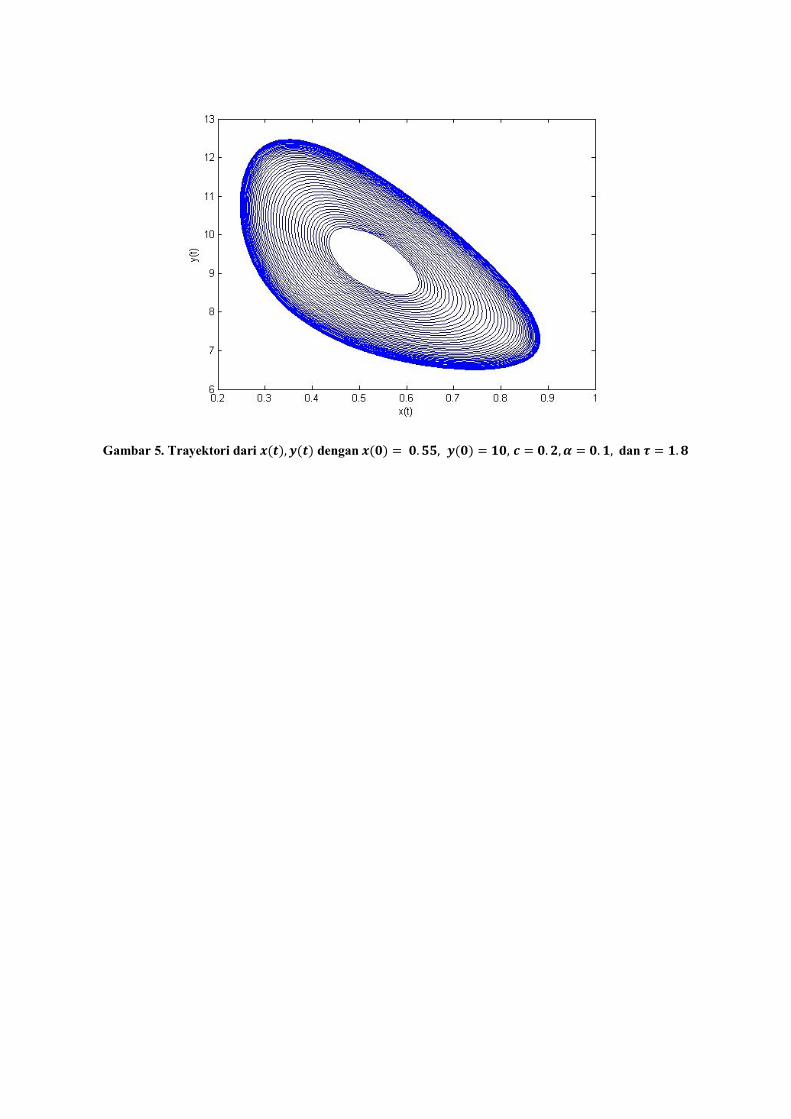
Gambar 5. Trayektori dari 풙(풕),풚(풕) dengan 풙(ퟎ) = ퟎ.ퟓퟓ, 풚(ퟎ) = ퟏퟎ, 풄 = ퟎ.ퟐ,휶 = ퟎ.ퟏ,dan 흉 = ퟏ.ퟖ