Embed Size (px)
Citation preview
Kevin MatulefMIT
Ryan O’DonnellCMU
Ronitt RubinfeldMIT
Rocco ServedioColumbia
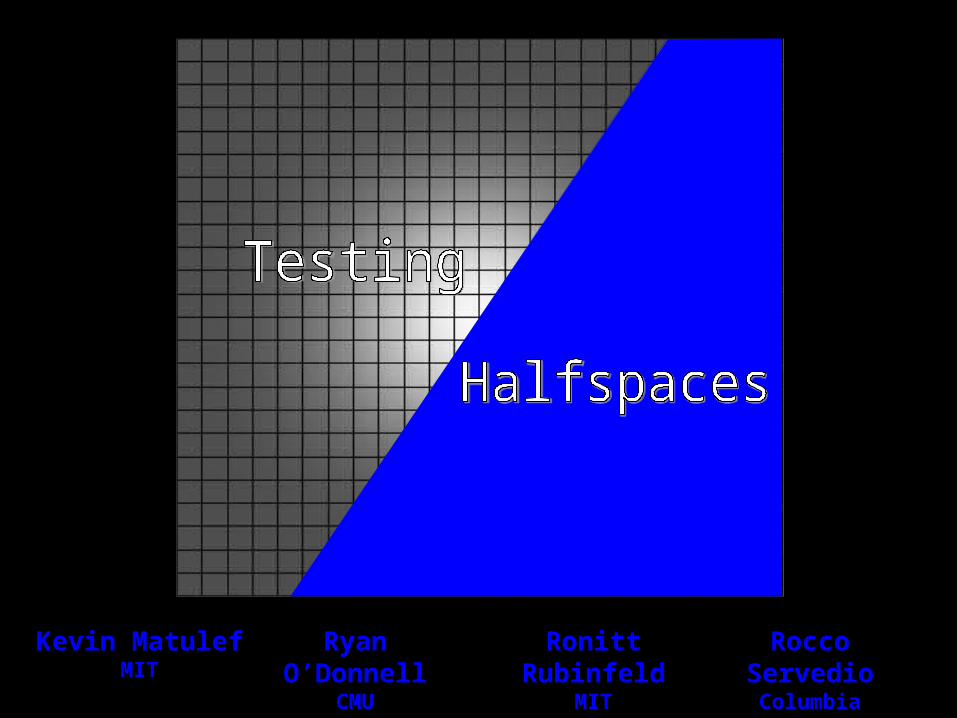
= Property Testing
Linear Threshold Functions =
Main Theorem:
There is a poly(1/) query,
nonadaptive,
two-sided error
property testing algorithm for being a halfspace.
Given black-box access to ,
f a halfspace ) alg. says YES with prob. ¸ 2/3;
f -far from all halfspaces ) alg. says YES with prob. · 1/3.
Halfspaces are testable.
Motivation
• “Usual” property testing motivation…?
• ‘precursor to learning’ motivation makes some sense
• Not many poly(1/)-testable classes known.
• Core test is 2-query:
f a halfspace ) Pr[ f passes] ¼ c
f -far from all halfspaces ) Pr[ f passes] · c − poly()
• Local tests really characterize the class:
“Halfspaces maximize this quadratic form,
and anything close to maximizing is close to a halfspace.”
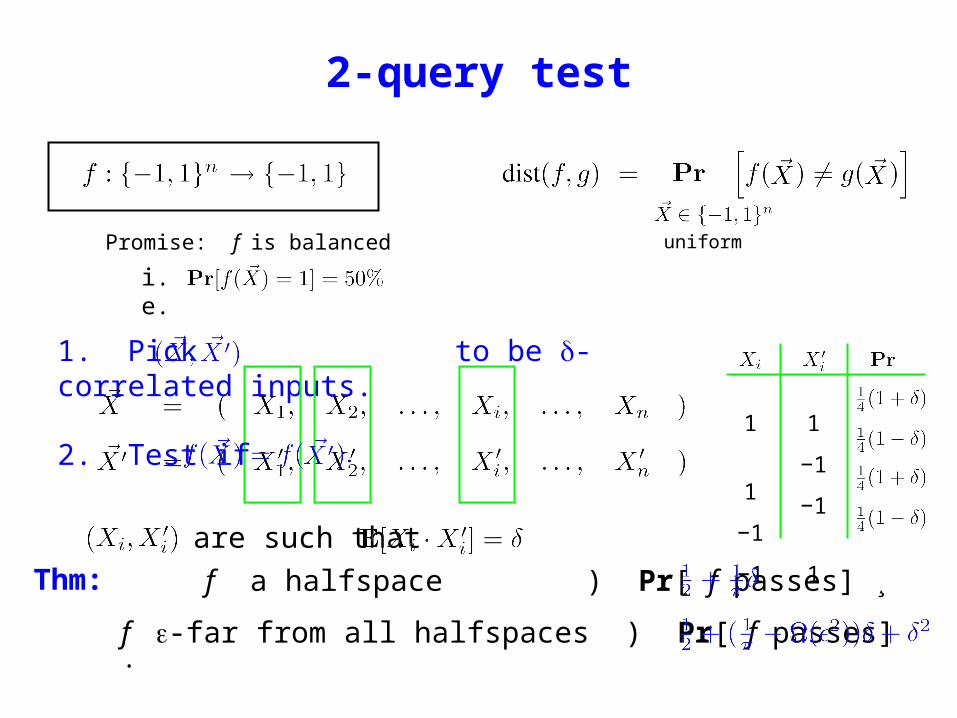
2-query test
Promise: f is balanced
1. Pick to be -correlated inputs.
are such that
2. Test if
Thm: f a halfspace ) Pr[ f passes] ¸
f -far from all halfspaces ) Pr[ f passes] ·
uniform
1
1
−1
−1
1
−1
−1
1
i.e.
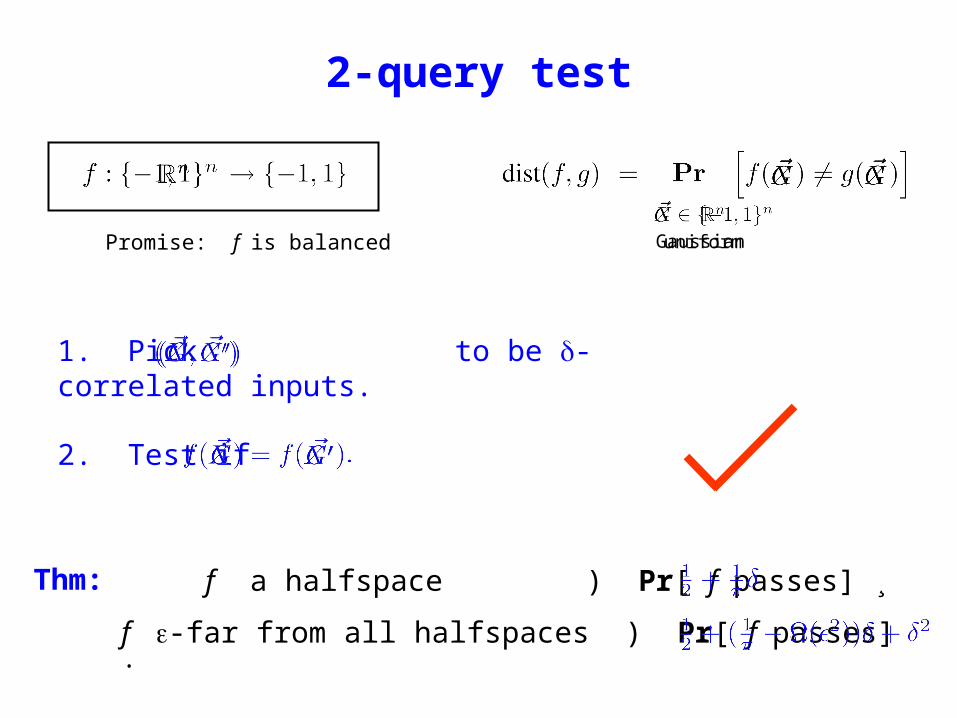
2-query test
Promise: f is balanced
1. Pick to be -correlated inputs.
2. Test if
Thm: f a halfspace ) Pr[ f passes] ¸
f -far from all halfspaces ) Pr[ f passes] ·
uniformGaussian
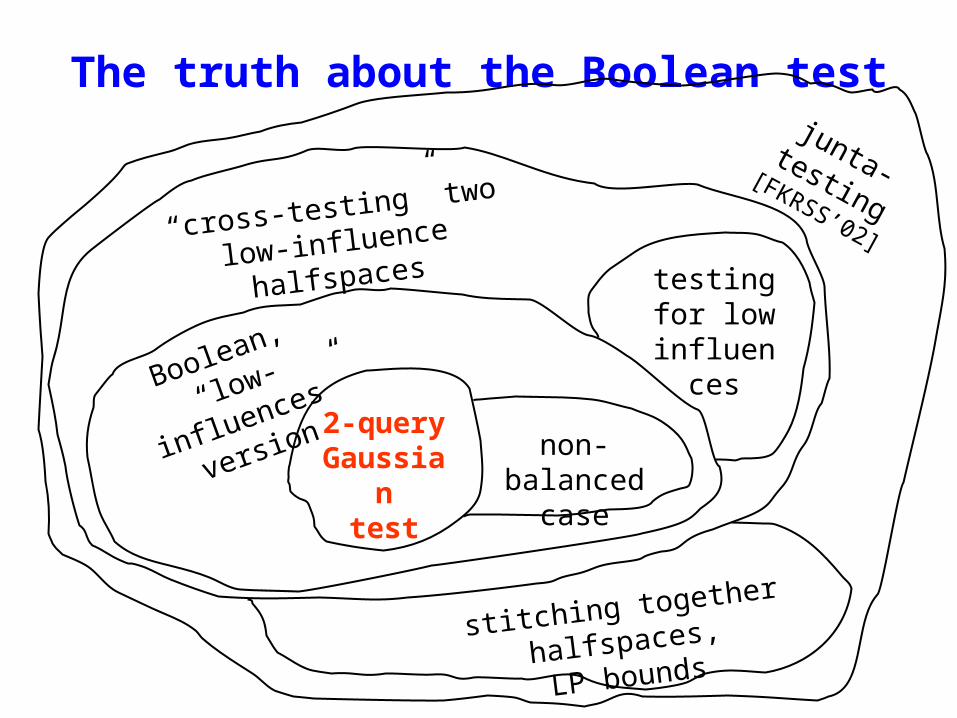
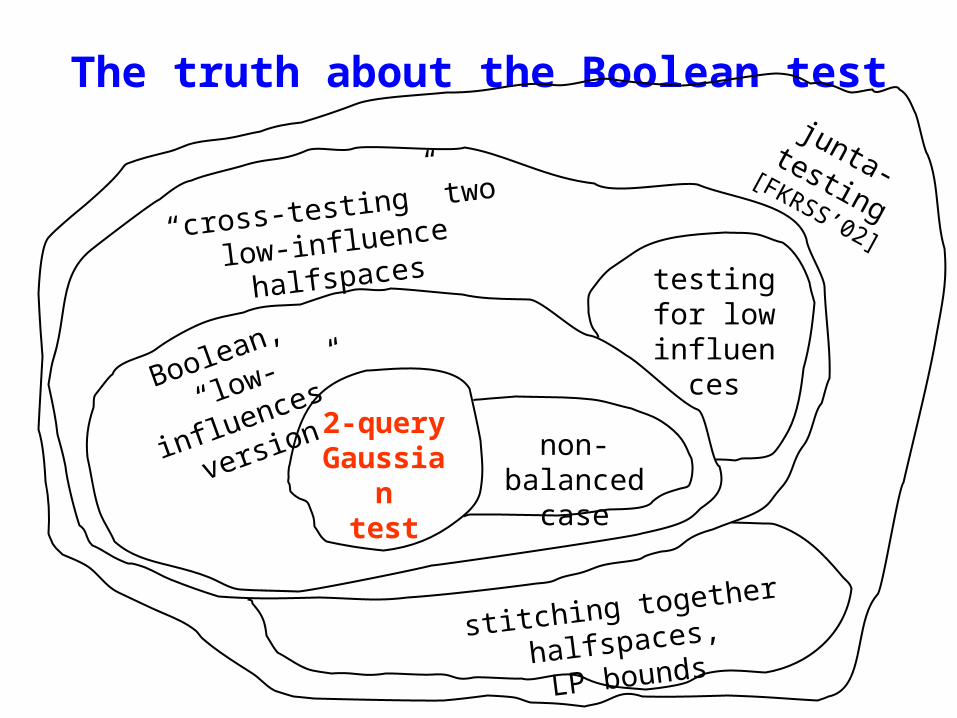
The truth about the Boolean test
2-queryGaussian
test
non-balancedcase
Boolean,
“low-influences”
version
testingfor low
influences
“cross-testing” two
low-influence halfspaces
stitching together halfspaces,
LP bounds
junta-testing[FKRSS’02]
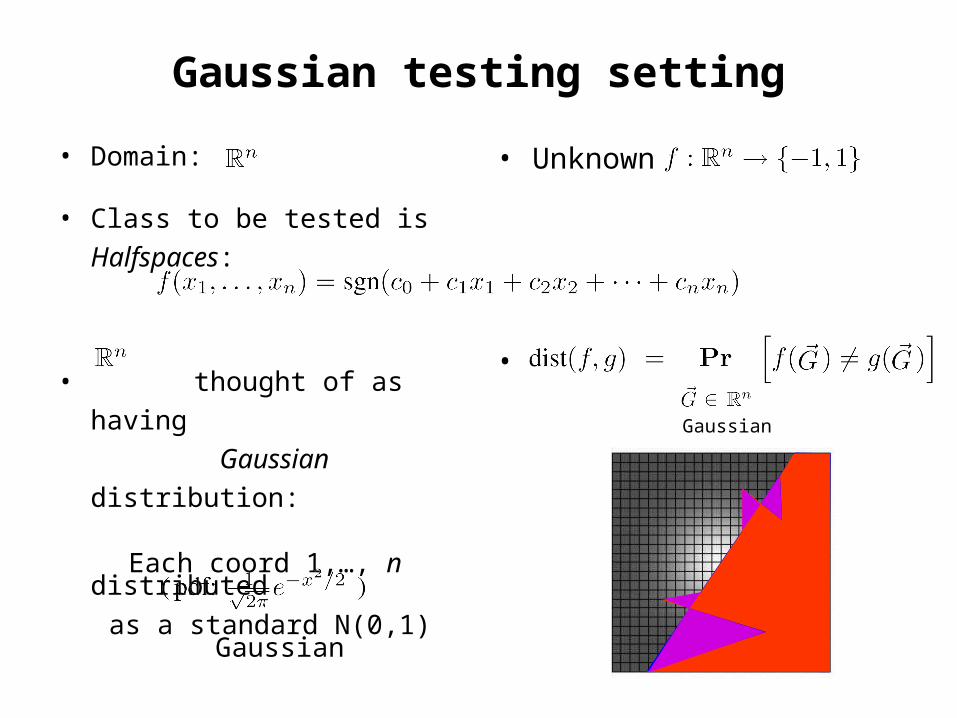
Gaussian testing setting
• Domain:
• Class to be tested is
Halfspaces:
• thought of as having
Gaussian distribution:
Each coord 1,…, n distributed
as a standard N(0,1) Gaussian
• Unknown
•
Gaussian
Facts about Gaussian space
• Rotationally invariant
• The r.v. has distribution N(0, ).
• With overwhelming probability,
• Hence essentially same as uniform distribution on the sphere.
• “ are -correlated n-dim. Gaussians:”
are i.i.d. “-correlated 1-dim. Gaussians:”
– draw , set
(proof: = , which has same distribution as
by rotational symmetry)
Why Gaussian space?
You: “Ryan, why are you hassling us with all this Gaussian stuff?
I only care about testing on {−1, 1}n.”
Me: “Sorry, you have to be able to solve this problem first.”
But also: Much nicer setting because of rotational invariance.
might really be a function
in disguise.
[class of halfspaces $ class of halfspaces]
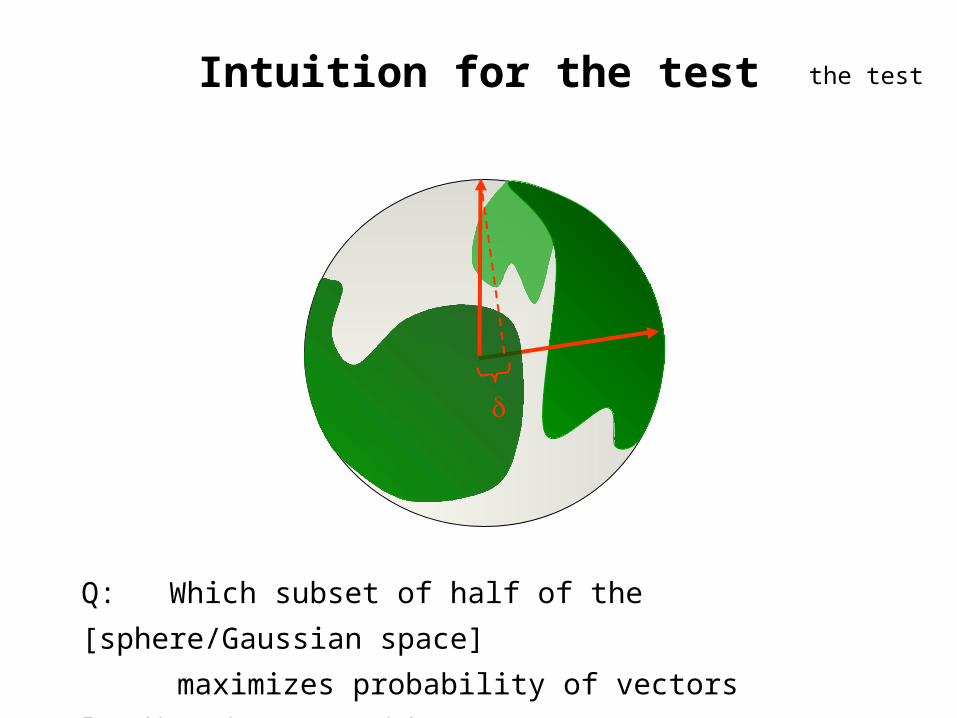
Intuition for the test
Q: Which subset of half of the [sphere/Gaussian space]
maximizes probability of vectors landing in same side?
the test
Intuition for the test
A: Halfspace, for each value of 2 [0,1]. (And each value of ½.)
(Gaussian: [Borell’85]; Sphere: [Feige-Schechtman’99], others?)
the test
But does this characterize halfspaces?
Q: If a set passes the test with probability close to that of a
halfspace, is it itself close to a halfspace?
A: Not known, in general.
But: We will show that this is true when is close to 0.
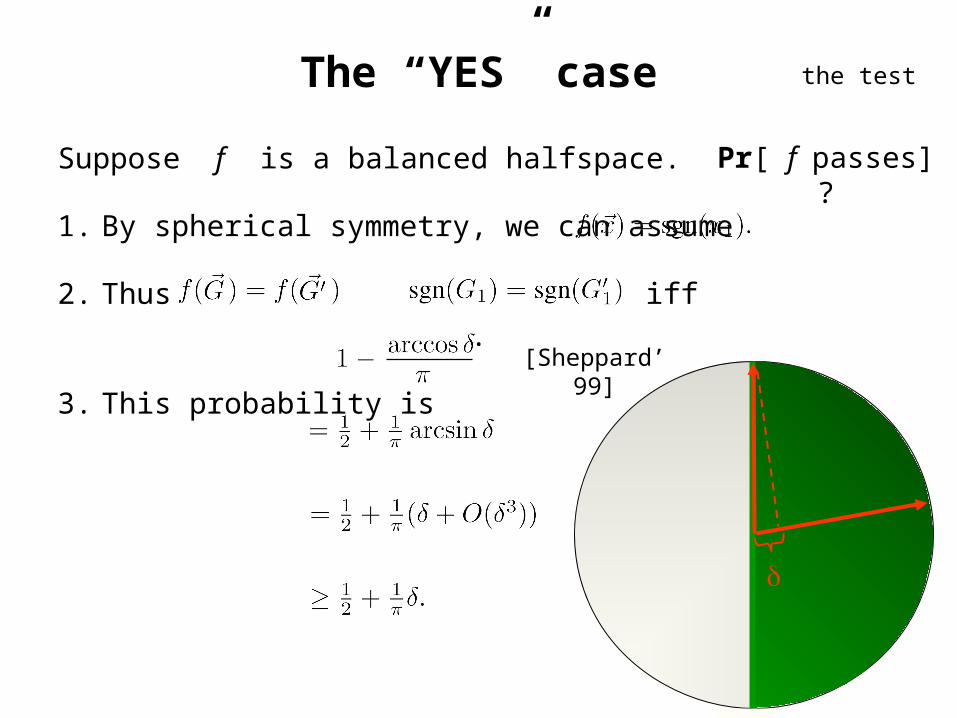
The “YES” case
Suppose f is a balanced halfspace.
1. By spherical symmetry, we can assume
2. Thus iff .
3. This probability is
[Sheppard’99]
the test
Pr[ f passes] ?
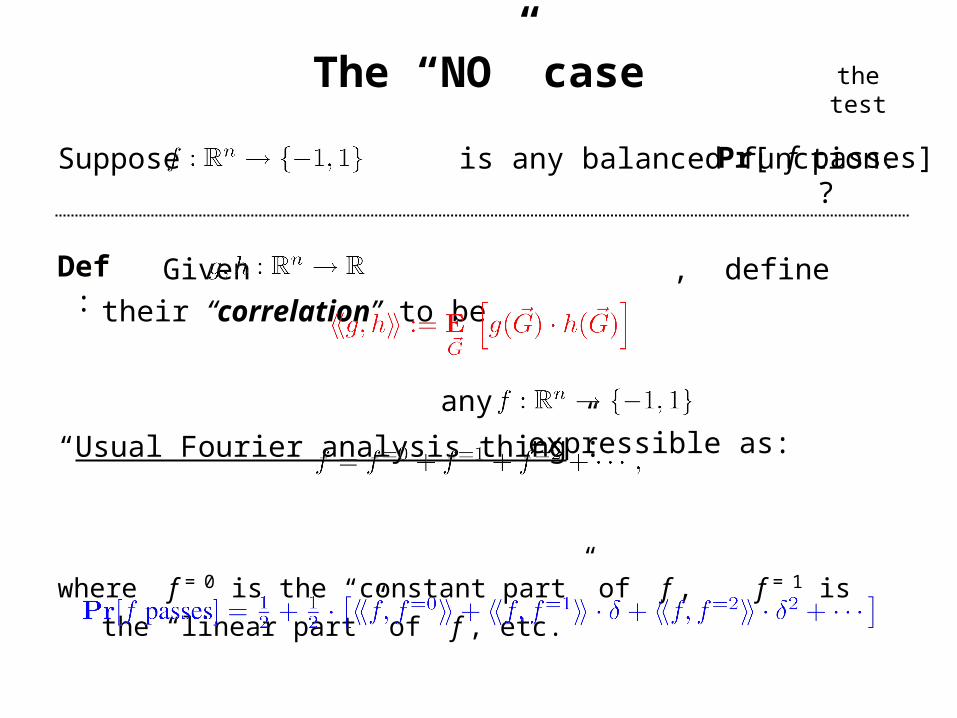
The “NO” case
Suppose is any balanced function.
Def: Given , define their “correlation” to be
“Usual Fourier analysis thing”:
where f = 0 is the “constant part” of f , f = 1 is the “linear part” of f , etc.
the test
Pr[ f passes] ?
Def:
any expressible as:
The “NO” case the test
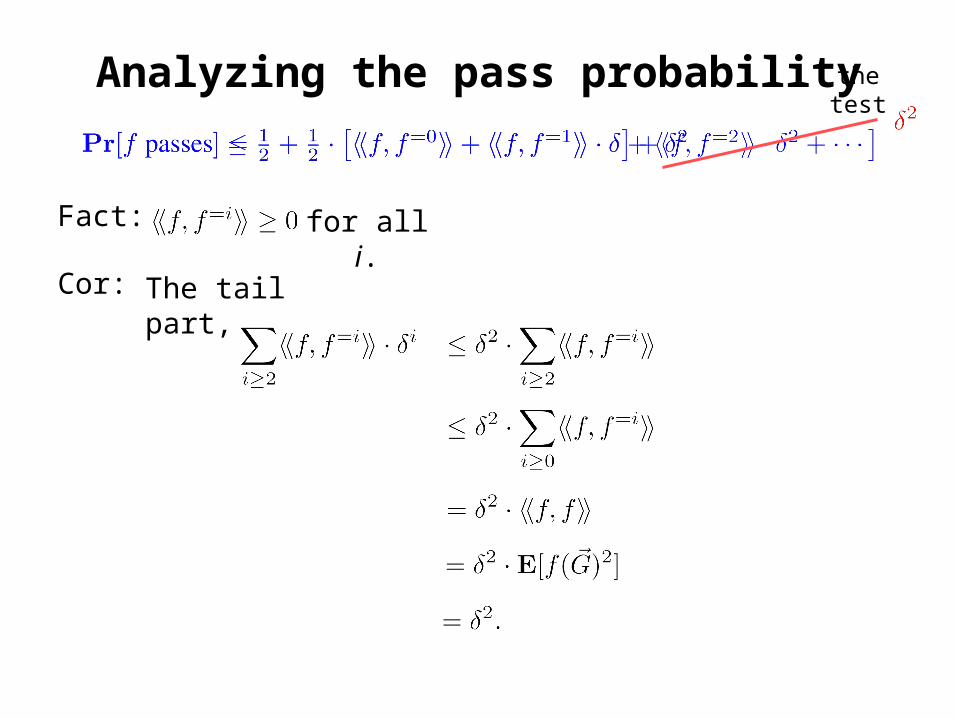
Analyzing the pass probability
Fact:
Cor:
the test
for all i.
The tail part,
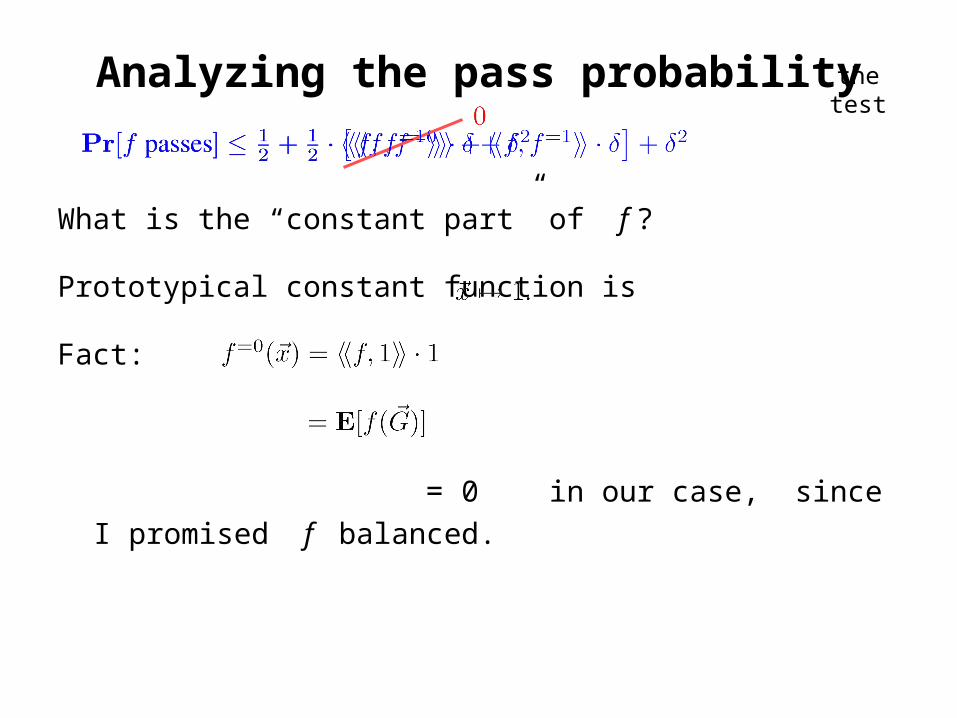
Analyzing the pass probability
What is the “constant part” of f ?
Prototypical constant function is
Fact:
= 0 in our case, since I promised f
balanced.
the test
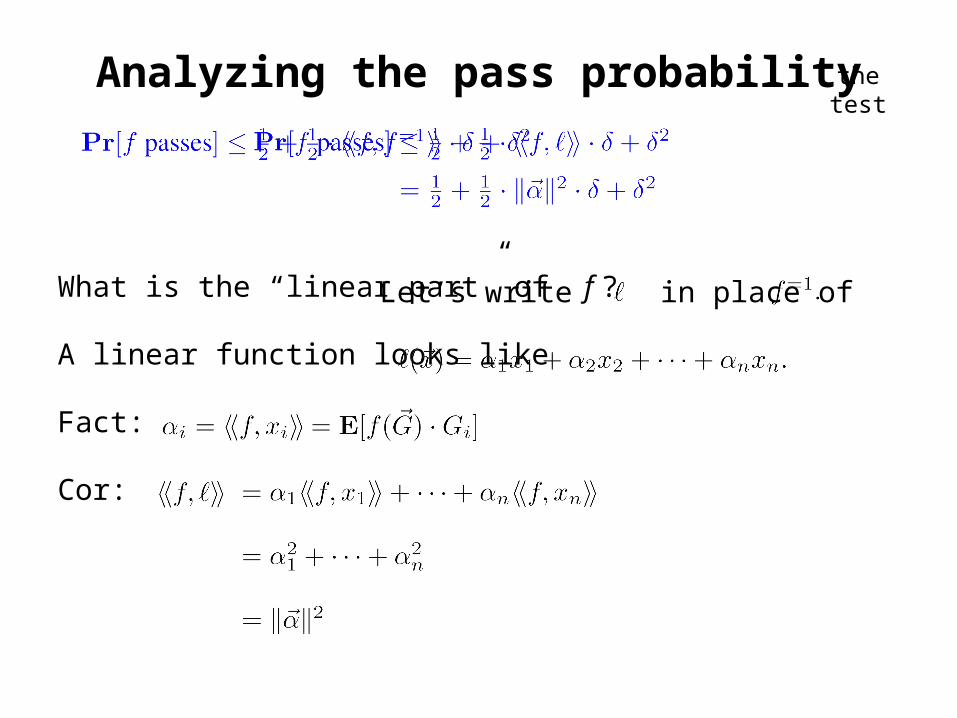
Analyzing the pass probability
What is the “linear part” of f ?
A linear function looks like
Fact:
Cor:
the test
Let’s write in place of
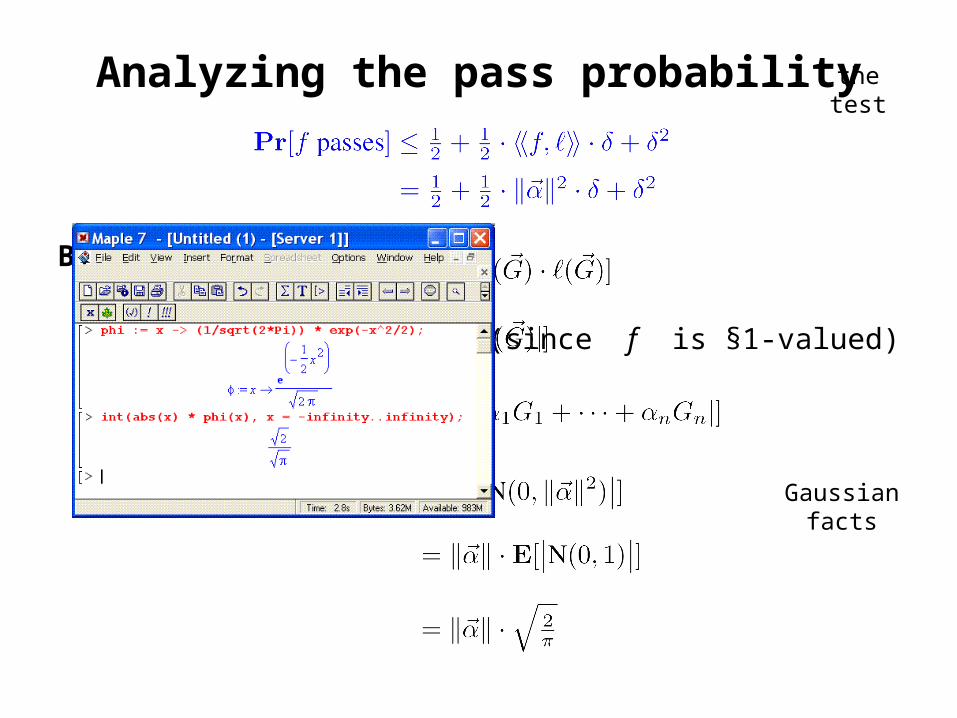
Analyzing the pass probability
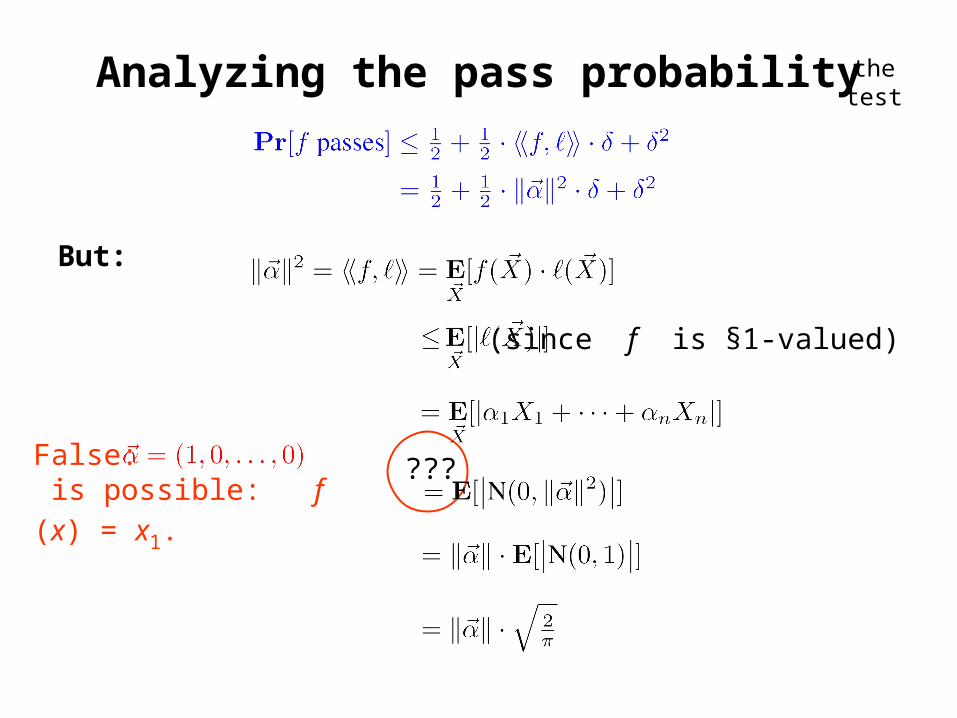
But:
(since f is §1-valued)
the test
Gaussian facts
The “NO” case completed
with equality iff
I.e., for any f :
if is close to , then f is close to being a halfspace.
In particular, with a little more analytic care, one concludes:
the test
(in fact, the sgn of its linear part)
)
The truth about the Boolean test
2-queryGaussian
test
non-balancedcase
Boolean,
“low-influences”
version
testingfor low
influences
“cross-testing” two
low-influence halfspaces
stitching together halfspaces,
LP bounds
junta-testing[FKRSS’02]
Boolean version
The “NO” case
Let’s PgUp and see what needs to change!
Analyzing the pass probability
But:
(since f is §1-valued)
the test
???False: is possible: f (x) = x1.
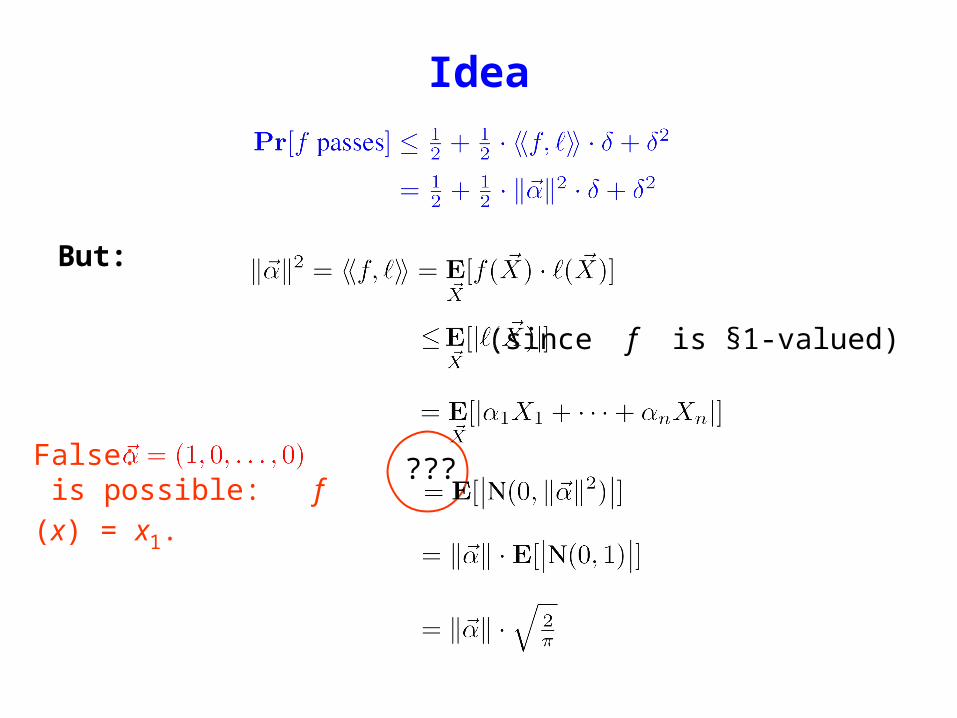
Idea
But:
(since f is §1-valued)
False: is possible: f (x) = x1.
???
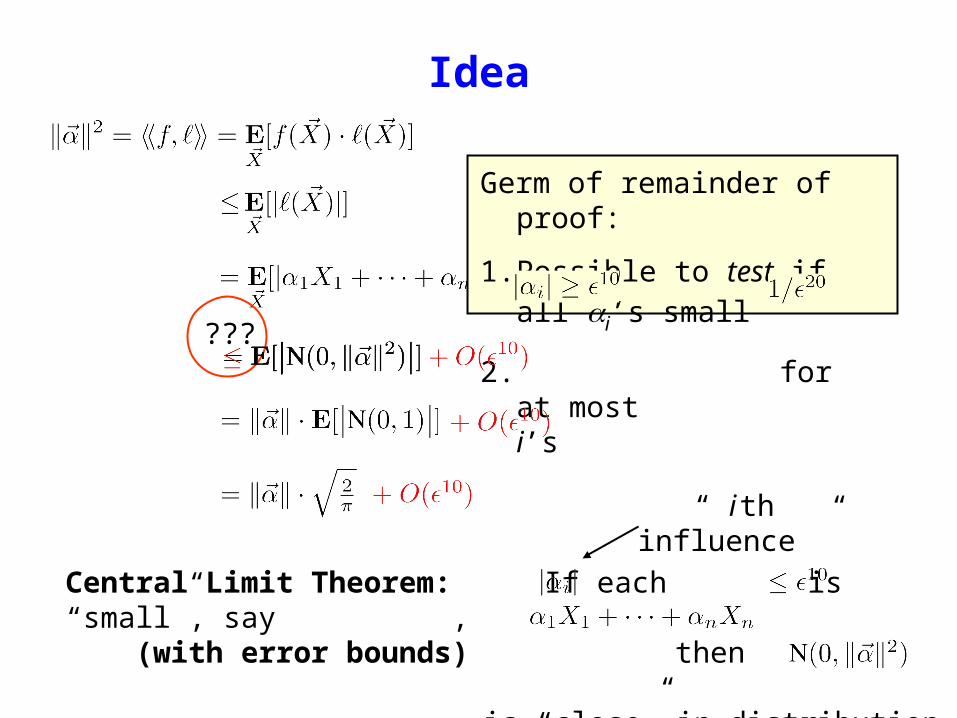
Idea
???
Central Limit Theorem: If each is “small”, say , (with error bounds) then
is “close” in distribution to .
“ i th influence ”
Germ of remainder of proof:
1. Possible to test if all i’s small
2. for at most i’s
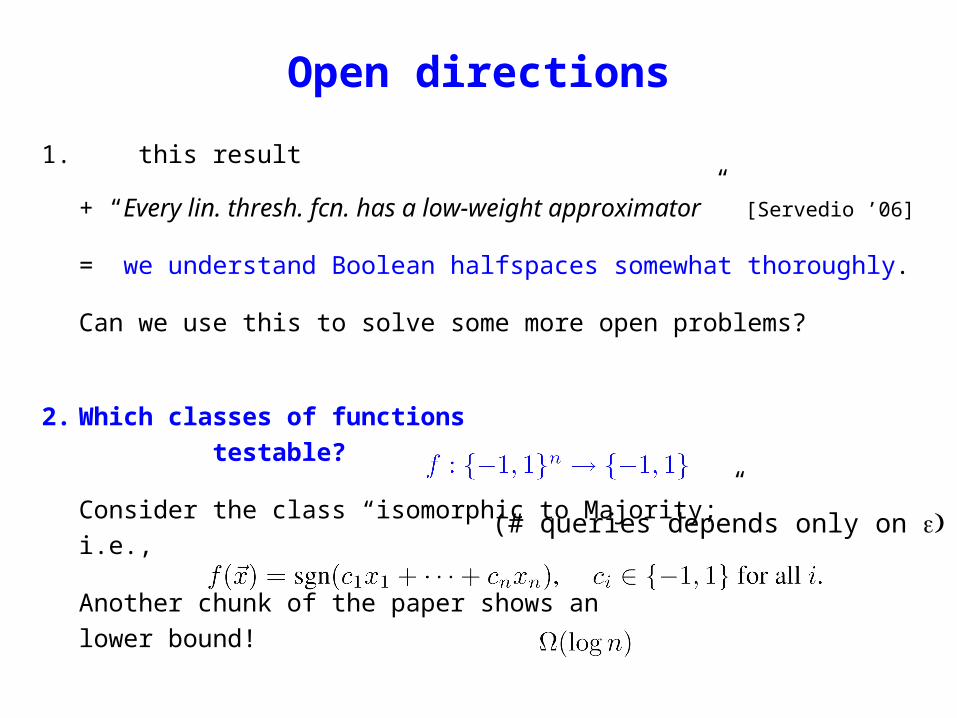
Open directions
1. this result
+ “Every lin. thresh. fcn. has a low-weight approximator” [Servedio
’06]
= we understand Boolean halfspaces somewhat thoroughly.
Can we use this to solve some more open problems?
2. Which classes of functions testable?
Consider the class “isomorphic to Majority;”
i.e.,
Another chunk of the paper shows an lower bound!
(# queries depends only on