Embed Size (px)
DESCRIPTION
Лекции по КММ
Citation preview

Компьютерное математическое моделирование
Технология компьютерного моделирования обогащает процесс обучения новыми средствами и методами решения реальных практических задач, открывая широкие возможности для осознания связи между информатикой, с одной стороны, и математикой, физикой, экономикой и другими науками с другой стороны.
Курс "Компьютерного математического моделирования" выполняет развивающую функцию, поскольку при его изучении учащиеся продолжают знакомство еще с одним методом познания окружающей действительности – методом компьютерного моделирования.
Он дает будущему учителю возможность приобрести новые знания, умения, навыки, ознакомить с использованием компьютера как средства научно-исследовательской деятельности в ходе работы с компьютерными моделями.
ВВЕДЕНИЕ
Целью изучения данного курса является знакомство учащихся еще с одним методом познания окружающей действительности – методом компьютерного математического моделирования. Технология компьютерного моделирования обогащает процесс обучения новыми средствами и методами решения реальных практических задач, открывая широкие возможности для осознания связи между информатикой, с одной стороны, и математикой, физикой, экономикой и другими науками с другой стороны.
Отметим, что, говоря о математических моделях, мы имеем в виду сугубо прикладной аспект. В современной математике есть достаточно формализованный подход к понятию «математическая модель». Внутри него вполне допустимо игнорировать вопрос о связи математики с физической реальностью. В этом подходе моделями являются, например, система целых чисел, система действительных чисел, евклидова геометрия, алгебраическая группа, топологическое пространство и т.д. К исследованию таких формальных моделей вполне можно подключить компьютеры, но все равно это останется «чистой» математикой. В данном курсе термин «математическая модель» увязывается с некоторой предметной областью, сущностью окружающего мира.
Компьютерное математическое моделирование в разных своих проявлениях использует практически весь аппарат современной математики.
В данной программе предполагается знание основ математики:• теории дифференциальных уравнений;• теории аппроксимации функций, • аналитической геометрии на плоскости и в пространстве;• математической статистики;• численных методов:
a) решения алгебраических и трансцендентных уравнений;b) решения систем линейных алгебраических уравнений;
c) интегрирования обыкновенных дифференциальных уравнений и их систем (задача Коши).
1

ПОНЯТИЕ "МОДЕЛЬ"
С понятием "модель" мы сталкиваемся с раннего детства: игрушечный автомобиль, самолет, кукла…Это модели реальных объектов, играющих большую роль в воспитании.
Приведем несколько примеров, поясняющих, что такое модель, a уж потом, когда некоторое интуитивное представление о понятии «модель» сформируется, дадим определение.
1. Архитектор готовится построить здание невиданного доселе типа. Но прежде чем воздвигнуть его, он сооружает это здание из кубиков на столе, чтобы посмотреть, как оно будет выглядеть.
2. Для того, чтобы объяснить, как функционирует система кровообращения, лектор демонстрирует плакат, на котором стрелочками изображены направления движения крови.
3. Перед тем как запустить в производство новый самолет, его помещают в аэродинамическую трубу и с помощью датчиков определяют величины напряжений, возникающих в различных местах конструкции.
4. Художник изобразил картину, изображающую бушующее море.Во всех перечисленных примерах имеет место сопоставление некоторого реального объекта с другим, его заменяющим
(оригинал – копия): реальное здание – макет здания из кубиков; серийный самолет – единичный самолет в трубе; система кровообращения – схема на плакате; бушующее море – картина, его изображающая. Причем во всех случаях предполагается, что какое-то свойство (свойства) сохраняется при переходе от исходного объекта к заменяющему или по крайней мере позволяет судить об исходном свойстве.
1. Хоть здание из кубиков и много меньше настоящего, но оно позволяет судить о его внешнем виде.2. Хоть плакат и не имеет ничего общего с тканями и системами живого организма, но он позволяет судить о
том, откуда и куда течет кровь.3. Хоть самолет, находящийся в аэродинамической трубе, и не летит, но напряжения, возникающие в его
корпусе, соответствуют условиям полета.4. Хоть картина и море с физической точки зрения не имеют, казалось бы, ничего общего, но эмоции они
могут вызвать сходные.После всего сказанного становится понятным такое определение.Модель – это такой материальный или мысленно представляемый объект, который в процессе познания (изучения)
замещает объект-оригинал, сохраняя некоторые важные для данного исследования типичные его черты.
2

О РАЗНОВИДНОСТЯХ МОДЕЛИРОВАНИЯ
Процесс построения модели называется моделированием. Существует несколько приемов моделирования, которые можно условно объединить в две большие группы:
1. материальное (предметное) моделирование 2. идеальное (абстрактное) моделирование.'
1. К материальным относятся такие способы моделирования, при которых исследование ведется на основе модели, воспроизводящей основные геометрические, физические, динамические и функциональные характеристики изучаемого объекта. Основными разновидностями материального моделирования являются:
а)физическое моделированияв)аналоговое моделирования.а)Физическим принято называть моделирование, при котором реальному объекту противопоставляется его увеличенная
или уменьшенная копия, допускающая исследование (как правило, в лабораторных условиях) с перенесением свойств изучаемых процессов и явлений с модели на объект на основе теории подобия. Вот несколько примеров физических моделей: в астрономии — планетарий, в гидротехнике — лотки с водой, моделирующие реки и водоемы, в архитектуре — макеты зданий, в самолетостроении—модели летательных аппаратов и т. п.
в)Аналоговое моделирование основано на аналогии процессов и явлений, имеющих различную физическую природу, но одинаково описываемых формально одними и теми же математическими уравнениями, логическими схемами.
Заметим, что в обоих типах материального моделирования модели являлись материальным отражением исходного объекта, причем процесс исследования был связан с материальным воздействием на модель, т. е. состоял в натурном эксперименте с ней. Таким образом, материальное моделирование является экспериментальным методом.
2. Идеальное (абстрактное) моделирование принципиально отличается от материального моделирования, поскольку оно основано не на материальной аналогии объекта, а на аналогии идеальной, мыслимой.
Идеальное моделирование носит теоретический характер. Различают два типа идеального моделирования: a) интуитивное b) знаковое.
a) Интуитивное моделирование основанно на интуитивном представлении об объекте исследования, не поддающемся формализации либо не нуждающемся в ней. В этом смысле, например, жизненный опыт каждого человека – это интуитивная модель окружающего мира.
b) Знаковым называется моделирование, использующее в качестве моделей знаковые преобразования какого-либо вида: схемы, графики, чертежи, формулы, наборы символов и т. д., а также включающее совокупность законов, по которым можно оперировать с выбранными знаковыми образованиями.
Важнейшим видом знакового моделирования является математическое моделирование, при котором исследование объекта осуществляется посредством модели, сформулированной на языке математики, с использованием математических методов.
УКРУПНЕННАЯ КЛАССИФИКАЦИЯ АБСТРАКТНЫХ МОДЕЛЕЙ
Укрупненная классификация абстрактных (идеальных) знаковых моделей такова:1. Вербальные (текстовые) модели . Эти модели используют последовательности предложений на формализованных
диалектах естественного языка для описания той или иной области действительности (примерами такого рода моделей являются милицейский протокол, правила дорожного движения).
2. Математические модели – очень широкий класс знаковых моделей (основанных на формальных языках над конечными алфавитами), широко использующих те или иные математические методы. Например, можно рассмотреть математическую модель звезды. Эта модель будет представлять собой сложную систему уравнений, описывающих физические процессы, происходящие в недрах звезды. Математической моделью другого рода являются, например, математические соотношения, позволяющие рассчитать оптимальный (наилучший с экономической точки зрения) план работы какого-либо предприятия.
3. Информационные модели – класс знаковых моделей, описывающих информационные процессы (возникновение,
передачу, преобразование и использование информации) в системах самой разнообразной природы. Граница между вербальными, математическими и информационными моделями может быть проведена весьма условно;
вполне возможно считать информационные модели подклассом математических моделей. Однако, в рамках информатики как самостоятельной науки, отделенной от математики, физики, лингвистики и других наук, выделение информационных моделей в отдельный класс является целесообразным.
ПОНЯТИЕ О КОМПЬЮТЕРНОМ МАТЕМАТИЧЕСКОМ МОДЕЛИРОВАНИИ
Курс компьютерного математического моделирования рассматривает прикладные математические модели, в реализации которых используются компьютеры. Внутри информатики именно компьютерное математическое и компьютерное информационное моделирование могут рассматриваться как ее составные части. Таким образом, компьютерное
3

математическое моделирование связано с информатикой технологически, т.е. использование компьютеров и соответствующих технологий обработки информации стало неотьемлемой и необходимой стороной работы физика, инженера, экономиста, эколога и т.д.
Математическое моделирование как таковое отнюдь не всегда требует компьютерного оснащения. Каждый специалист, профессионально занимающийся математическим моделированием, делает все возможное для получения аналитических решений. Аналитические решения (представленные формулами, выражающими результаты исследования через исходные данные) обычно удобнее и информативнее численных. Однако, возможности аналитических методов решения сложных математических задач очень ограниченны и, как правило эти методы гораздо сложнее численных. численных. Поэтому при решении сложных математических задач используют численные методы, реализуемые на компьютерах. Моделирование здесь рассматривается под углом зрения компьютерных (информационных) технологий и включает численный эксперимент. Кроме того, отметим, что понятия «аналитическое решение» и «компьютерное решение» отнюдь не противостоят друг другу, так как:
а) компьютеры при математическом моделировании все чаще используются не только для численных расчетов, но и для аналитических преобразований. Этому служат интегрированные математические пакеты MatLab, MathCAD, Maple, Mathematica;
б) результат аналитического исследования математической модели часто выражен столь сложной формулой, что при взгляде на нее не складывается восприятия описываемого ею процесса. Поэтому эту формулу нужно протабулировать, представить графически, проиллюстрировать в динамике, иногда даже озвучить, т.е. провести «визуализацию» полученного аналитического результата. При этом компьютер – незаменимое техническое средство.
ЭТАПЫ И ЦЕЛИ КОМПЬЮТЕРНОГО МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
Рассмотрим процесс компьютерного математического моделирования, включающий численный эксперимент с моделью
(рис.2).
I. Первый этап компьютерного математического моделирования – определение целей моделирования.
ЦЕЛИ КОМПЬЮТЕРНОГО МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
Основные из них таковы:
1) модель нужна для того, чтобы понять как устроен конкретный объект, какова его структура, основные свойства,
законы развития и взаимодействия с окружающим миром (понимание);
2) модель нужна для того, чтобы научиться управлять объектом (или процессом) и определить наилучшие способы управления при заданных целях и критериях (управление);
3) модель нужна для того, чтобы прогнозировать прямые и косвенные последствия реализации заданных способов и
форм воздействия на объект (прогнозирование).
Поясним это на примерах. 1. Пусть объект исследования – взаимодействие потока жидкости или газа с телом, являющимся для этого потока
препятствием. Опыт показывает, что сила сопротивления потоку со стороны тела растет с ростом скорости потока, но при некоторой достаточно высокой скорости эта сила скачком уменьшается и в дальнейшем с увеличением скорости снова растет. Что же произошло, обусловив уменьшение силы сопротивления? Математическое моделирование позволяет понять и получить четкий ответ: в момент скачкообразного уменьшения сопротивления вихри, образующиеся в потоке жидкости или газа позади обтекаемого тела, начинают отрываться от него и уноситься потоком.
2. Другая возможная цель моделирования – выработка концепции управления объектом. Какой режим 'полета самолета выбрать для того, чтобы полет был вполне безопасным и экономически наиболее выгодным? Как составить график выполнения сотен видов работ на строительстве большого объекта, чтобы оно закончилось в максимально короткий срок? Множество таких проблем систематически возникает перед экономистами, конструкторами, учеными.
3. Еще одна возможная цель моделирования – прогнозирование последствий тех или иных воздействий на объект. Оно может быть как относительно простым делом в несложных физических системах, так и чрезвычайно сложным – на грани выполнимости – в системах биолого - экономических, социальных. Если относительно легко ответить на вопрос об изменении режима распространения тепла в тонком стержне при изменениях в составляющем его сплаве, то несравненно труднее предсказать экологические и климатические последствия строительства крупной ГЭС. И здесь методы математического моделирования будут оказывать в будущем более значительную помощь.
4

II. Второй этап моделирования – ранжирование моделиСоставим список величин, от которых зависит поведение объекта или ход процесса, а также тех величин, которые
желательно получить в результате моделирования. Обозначим первые (входные) величины через х1, х2, ....,xn; вторые (выходные) – через y1,y2,…,yk . Символически поведение объекта или процесса можно представить в виде
уJ = FJ (х1, х2, ....,xn ), (j = 1, 2,...,k),
где FJ – те действия, которые следует произвести над входными параметрами, чтобы получить результаты, т.е. FJ (х1,
х2, ....,xn ) – оператор.
Важнейшим этапом моделирования является разделение входных параметров по степени важности влияния их изменений
на выходные. Такой процесс называется ранжированием (разделением по рангам). Чаще всего невозможно (да и не нужно)
учитывать все факторы, которые могут повлиять на значения интересующих нас величин уj . От того, насколько умело
выделены важнейшие факторы, зависит успех моделирования, быстрота и эффективность достижения цели.
Выделить более важные (или, как говорят, значимые) факторы и отсеять менее важные может лишь специалист в той
предметной области, к которой относится модель.
Отбрасывание (по крайней мере при первом подходе) менее значимых факторов огрубляет объект моделирования и
способствует пониманию его главных свойств и закономерностей. Умело ранжированная модель должна быть адекватна
исходному объекту или процессу в отношении целей моделирования. Обычно определить адекватна ли модель можно
только в процессе экспериментов с ней и анализа результатов.
На рис. 1 проиллюстрированы две крайние ситуации:
а) некоторый параметр очень сильно влияет на результирующую величину уj ;
б) почти не влияет на нее.
Ясно, что если все представляющие интерес величины уj, реагируют на хi; так, как изображено на рис. 1(б), то хi является
параметром, который при первом подходе может быть из модели исключен.
Если же хотя бы одна из величин уj реагирует на изменение хi так, как изображено на рис. 1(а), то хi нельзя исключать из
числа важнейших параметров
5

Входные параметры могут быть известны «точно», т.е. поддаваться измерению однозначно и с любой степенью точности
– тогда они являются детерминированными вёличинами. Так, в классической механике, сколь сложной ни была бы
моделируемая система, входные параметры детерминированы – соответственно, детерминирован, т.е. однозначно
развивается во времени процесс эволюции такой системы. Однако, в природе и обществе гораздо чаще встречаются
процессы иного рода, когда значения входных параметров известны лишь с определенной степенью вероятности, т.е. эти
параметры являются вероятностными (стохастическими), и, соответственно, таким же является процесс эволюции
«Случайный» – не значит «непредсказуемый»; просто характер исследования, задаваемых вопросов резко меняется (они
приобретают вид «С какой вероятностью...», «С каким математическим ожиданием...» и т.п.). Примеров случайных
процессов не счесть как в науке, так и в обыденной жизни (силы, действующие на летящий самолет в ветренную погоду,
переход улицы при большом потоке транспорта и т.д.). Для стохастической модели выходные параметры могут быть как величинами вероятностными, так и однозначно
определяемыми. Пример последнего: на перекрестке улиц можно ожидать зеленого сигнала светофора и полминуты, и две минуты' (с разной вероятностью), но среднее время ожидания есть величина вполне определенная и именно он может быть о6ъектом моделирования.
Изобразим схему поэтапного процесса компьютерного математического моделирования:
Рис. 2.
6
ОПРЕДЕЛЕНИЕ ЦЕЛЕЙ
МОДЕЛИРОВАНИЯ
Огрубление объекта
(ранжирование)
Поискматематического
описания
Математическаямодель
Выбор методаисследования
Уточнениемодели
Анализрезультато
в
Разработка алгоритма ипрограммы для ЭВМ
Отладка и тестирование программы
Расчеты наЭВМ
Конецработы
Исходный объект(процесс
)

III. Третий этап – поиск математического описания. На этом этапе необходимо перейти от абстрактной формулировки модели к математической формулировке. В этот момент модель предстает перед нами в виде уравнения, системы уравнений, системы неравенств, дифференциального уравнения или системы таких уравнений и т.д.
IV. Четвертый этап – выбор метода.
Когда математическая модель сформулирована, выбираем метод ее исследования. Как правило, для решения одной и той
же задачи есть несколько конкретных методов, различающихся эффективностью, устойчивостью и т.д. От верного выбора
метода часто зависит успех всего процесса. V. Пятый этап – разработка алгоритма и составление программы – это творческий и трудно формализуемый
процесс. В настоящее время при реализации компьютерной математической модели наиболее распространенными являются приемы процедурно-ориентированного (структурного) и объектно-ориентированного программирования.
VI. Шестой этап – отладка и тестирование программы.
После составления программы решаем с ее помощью простейшую тестовую задачу (желательно, с заранее известным
ответом) с целью устранения грубых ошибок. Это – лишь начало процедуры тестирования, которую трудно описать
формально исчерпывающим образом. По существу, тестирование может продолжаться долго и закончиться тогда, когда
пользователь по своим профессиональным признакам сочтет программу верной.
VII. Седьмой этап расчеты на ЭВМ – численный эксперимент.
Затем следует собственно численный эксперимент, и выясняется, соответствует ли модель реальному объекту (процессу).
Модель считается адекватной реальному процессу, если некоторые характеристики процесса, полученные на ЭВМ,
совпадают с экспериментальными с заданной степенью точности. В случае несоответствия модели реальному процессу
возвращаемся к одному из предыдущих этапов – ранжированию (отбрасываем или вводим в рассмотрение один или
несколько исходных параметров) или уточним выбор метода решения..
КЛАССИФИКАЦИЯ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ
К классификации математических моделей можно подходить по-разному, положив в основу классификации различные принципы. Можно классифицировать модели по отраслям наук, т.е. рассматривать математические модели в:
физике, биологии, экологии, социологии и т.д.
Эта классификация естественна, если к этому подходит специалист в какой-то одной науке. Можно классифицировать по применяемому математическому аппарату , т.е. модели, основанные на применении:
обыкновенных дифференциальных уравнений, дифференциальных уравнений в частных производных, стохастических методов, дискретных алгебраических преобразований и т.д.
Эта классификация естественна для математика, занимающегося аппаратом математического моделирования.
7

Если же человек интересуется общими закономерностями моделирования в разных науках безотносительно к математическому аппарату, то он поставит на первое место цели моделирования. Тогда получится следующая классификация:
• дескриптивные (описательные) модели;
• оптимизационные модели;
• многокритериальные модели;
• игровые модели;
• имитационные модели.
Остановимся на этом чуть подробнее и поясним на примерах:
1. Моделируя движение кометы, вторгшейся в Солнечную систему, мы описываем (предсказываем) траекторию ее полета, расстояние, на котором она пройдет от Земли и т. д., т. е. ставим чисто описательные цели. У нас нет никаких возможностей повлиять на движение кометы, что-то изменить. Дескриптивными будут в нашем курсе:
a. модель свободного падения тела с учетом сопротивления среды,
b. модель движения тела, брошенного под углом к горизонту,
c. модель распространения тепла в стержне,
d. модель движения тела с переменной массой.
2. В некоторых случаях мы можем воздействовать на процесс, пытаясь добиться какой-то цели. В этом случае в модель входит один или несколько параметров, доступных нашему влиянию. Например, имеется несколько видов сырья, которые используются для производства нескольких видов продуктов. На каждый вид сырья имеются ограничения. Известен состав продуктов, а также доход от их производства.. Определить объем выпуска каждого продукта, чтобы максимизировать прибыль. В нашем курсе мы будем использовать оптимизационные модели при решении экономических задач.
3. Часто приходится оптимизировать процесс по нескольким параметрам сразу, причем цели могут быть весьма противоречивыми. Например, зная цены на продукты и потребность человека в пище, организовать питание больших групп людей (в армии, летнем лагере и др.). С одной стороны питание должно быть как можно полезнее, с другой стороны – как можно дешевле. Ясно, что эти цели, вообще говоря, совсем не совпадают, т.е. при моделировании будет несколько критериев, между которыми надо искать баланс.
4. Игровые модели могут иметь отношение не только к детским играм (в том числе и компьютерным), но и к вещам весьма серьезным. Например, полководец перед сражением в условиях наличия неполной информации о противостоящей армии должен разработать план: в каком порядке вводить в бой те или иные части и при этом учитывать возможную реакцию противника. При этом используется довольно сложный раздел современной математики – теория игр. Она изучает методы принятия решений в условиях неполной информации.
5. Имитационные модели. Часто бывает, что модель в большой мере подражает реальному процессу, т.е. имитирует его.
Например – моделирование движения молекул в газе. Каждая молекула представляется в виде шарика, и задаются условия
поведения этих шариков при столкновении друг с другом и со стенками (например, абсолютно упругий удар); при этом не
нужно использовать никаких уравнений движения. В данном случае имитационное моделирование применяется для
описания свойств большой системы при условии, что поведение составляющих ее объектов очень просто сформулировано.
Тогда математическое описание сводится к статистической обработке результатов моделирования. В нашем курсе мы будем
рассматривать метод Монте-Карло, основанный на моделировании случайных величин.
8

МОДЕЛИРОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ
Физика и моделирование
В физике математическое моделирование является чрезвычайно важным методом исследования. Наряду с традиционным делением физики на экспериментальную и теоретическую сегодня уверенно выделяется третий фундаментальный раздел – вычислительная физика. Причину этого в целом можно сформулировать так: при максимальном проникновении в физику математических методов, порой доходящем до фактического сращивания этих наук, реальные возможности решения возникающих математических задач традиционными методами очень ограниченны. Из многих конкретных причин выделим две наиболее часто встречающихся:
нелинейность многих физических процессов и отсюда нелинейность описывающих их математических моделей
необходимость исследования совместного движения многих тел, для которого приходится решать системы большого числа уравнений.
Численное моделирование в физике называют вычислительным экспериментом, поскольку оно имеет много общего с лабораторным экспериментом.
Таблица 1Аналогии между лабораторным и вычислительным экспериментами
Лабораторный эксперимент вычислительный эксперимент
Образец Физический прибор Калибровка прибора Измерение Анализ данных
Модель Программа для компьютера Тестирование программы Расчёт Анализ данных
Численное моделирование (как и лабораторные эксперименты) чаще всего является инструментом познания
качественных закономерностей природы. Важнейшим его этапом является анализ результатов, представление их в
максимально наглядной и удобной для восприятия форме. Получение распечатки чисел еще не означает окончания
моделирования (даже если эти числа верны). Важно представить результаты в виде графиков, диаграмм, траекторий
движения динамических объектов для получения качественной информации. Здесь необходима помощь компьютера –
возможность визуализации абстракций.
9

СВОБОДНОЕ ПАДЕНИЕ ТЕЛА С УЧЕТОМ СОПРОТИВЛЕНИЯ СРЕДЫ
Второй закон Ньютона.
В рассматриваемых ниже физических задачах фундаментальную роль играет второй закон Ньютона. Он гласит, что ускорение, с которым движется тело, прямо пропорционально действующей на него силе (если их несколько, то
равнодействующей, т.е. векторной сумме сил) и обратно пропорционально его массе:
В ситуации, когда сила или масса не являются величинами постоянными, необходимо записать этот закон в более общей математической форме.
Допустим, что сила или масса (или и то, и другое) непостоянны и заданным образом зависят от времени, скорости
движения или перемещения: и . Достаточно хотя бы одной зависимости, чтобы ускорение было
величиной переменной. Тогда формула Ньютона определяет значение ускорения в тот момент времени, которому
соответствуют сила и масса. Интерес представляет временная зависимость перемещения и скорости
Поскольку ускорение есть приращение скорости, а скорость — приращение перемещения, то(1)
а сам второй закон Ньютона приобретает вид
(2)
или, что то же самое,
(3)
Произведем дискретизацию по времени простейшим возможным способом. Пусть в начальный момент времени t0
величина s имеет значение s0 а величина v – значение v0. Тогда в некоторый последующий момент времени
будем иметь
(4)
В последующие моменты времени можно поступать аналогично (4). Так, если известны значения vi, и si в момент ti , то
(5)
Сила сопротивления.
При реальных физических движениях тел в газовой или жидкостной среде трение накладывает огромный отпечаток на характер движения. О силе сопротивления среды движущемуся телу известно, что она, вообще говоря, растет с ростом скорости (хотя это утверждение не является абсолютным). При относительно малых скоростях величина силы сопротивления
пропорциональна скорости и имеет место соотношение , где определяется свойствами среды и формой
тела.
Например, для шарика - это формула Стокса, где -динамическая вязкость среды, r— радиус шарика.
Так, для воздуха при t = 20°С и давлении 1 атм = 0,0182 Нсм2, для воды = 1,002 Нсм2, для глицерина = 1480 Нсм2.Оценим, при какой скорости для падающего вертикально шара сила сопротивления сравняется с силой тяжести (и
движение станет равномерным).Имеем
10

(6)
Пусть r = 0,1 м, = 0,8103 кг/м3 (дерево). При падении в воздухе v= 960 м/с, в воде v = 17 м/с, в глицерине v = 0,012 м/с.
При более высоких скоростях сила сопротивления становится пропорциональной квадрату скорости: .
Если квадратичная составляющая скорости намного больше линейной составляющей скорости, т. е. k2 v2 » k1v, то вкладом линейной составляющей k1v можно пренебречь (это конкретный пример ранжирования факторов). Каково значение коэффициента k2 – квадратичной составляющей скорости? О величине k2 известно следующее: она пропорциональна площади
сечения тела S, поперечного по отношению к потоку, и плотности среды и зависит от формы тела. Обычно представляют
, где c - коэффициент лобового сопротивления - безразмерен. Некоторые значения c приведены на рис.1.
11
Диск с = 1,11
Полусфера с = 1,33
Полусфера с = 0,55
Шар с = 0,4
Каплевидное тело с = 0,045
Каплевидное тело с = 0,1
Рис 1. Значения коэффициента с – лобового сопротивления
Для движения в воздухе плотность среды = 1,29 кг/м3, в воде
= 1103 кг/м3, в глицерине = 1,26103 кг/м3.
Свободное падение тела.
Математическая модель свободного падения тела – уравнение второго закона Ньютона с учетом двух сил, действующих на тело – силы
тяжести и силы сопротивления среды
. Движение является одномерным. Проецируя силу, скорость и перемещение на ось, направленную вертикально вниз, из (3) получаем
12

(7)
В конкретных задачах можно одной из составляющих силы сопротивления пренебречь (если она заведомо много меньше другой).
Если скорость движения мала (v = 0.1 м/с), т. е. k2 v2 << k1v, то отбрасывается квадратичная составляющая скорости.
Если скорость движения велика (v = 1000 м/с), т. е. k2 v2 >> k 1v, то отбрасывается линейн ая составляющая скорости.
Частичное тестирование моделирующей программы можно провести для движения без сопротивления. Аналитическое решение в этом
случае общеизвестно.
Входные параметры модели:
Начальная высота тела;
Начальная скорость тела;
Величины, определяющие коэффициенты сопротивления среды .
Задача
Парашютист совершает затяжной прыжок. Считая массу парашютиста заданной (m=80 кг), определить, начиная с какого времени после начала полета скорость человека - «безпарашютиста» становится постоянной. Построить график зависимости скорости падения «безпарашютиста» от времени.
Решение.
Вопрос, который мы будем обсуждать: каков характер изменения скорости со временем, если все параметры, входящие в уравнения (7), заданы? При такой постановке модель носит сугубо дескриптивный характер. Из соображений здравого смысла ясно, что при наличии сопротивления, растущего со скоростью, в какой-то момент сила сопротивления сравняется с силой тяжести, после чего скорость больше возрастать не будет. Выберем путь численного моделирования. Итак, математическая модель выражается системой дифференциальных уравнений (7)
Разумеется, это не только абстрактное выражение обсуждаемой физической ситуации, но и сильно идеализированное. Нельзя ли произвести дополнительное ранжирование уже в рамках самой математической модели с учетом конкретно решаемой задачи, а именно - будет ли влиять на полет парашютиста линейная часть силы сопротивления и стоит ли ее учитывать при моделировании?
Скорость движения должна быть достаточно большой, тогда вкладом линейной составляющей силы сопротивления k1v можно пренебречь. Ясно, что практически с самого начала скорость падения «безпарашютиста» гораздо больше 0,2 м./с. (скорость, при которой сравняются линейная и квадратичная составляющие силы сопротивления), и поэтому линейную составляющую k1v можно отбросить, оставив лишь квадратичную составляющую k2 v2. Тогда математическая модель выражается системой дифференциальных уравнений:
(8)
где v –скорость, t – время, h – высота, m – масса, g – ускорение свободного падения, k2 – коэффициент квадратичной составляющей скорости.
Рост человека возьмем средний - 1,7 м, а полуобхват грудной клетки выберем в качестве характерного расстояния - это приблизительно 0,4 м. Выберем в качестве коэффициента число с = 1,22 как среднее между коэффициентами для диска и для полусферы (выбор для качественной оценки правдоподобен). Оценим площадь поперечного сечения: S = 1,70,4=0,7 м2.
= 1,29 кг/м3
Тогда 0,51,220,71,29 = 0.55083 кг/м.
Масса парашютиста m = 80 кг.
Теперь можно приступить к численному решению задачи. При этом следует воспользоваться любым из известных численных методов интегрирования систем обыкновенных дифференциальных уравнений. Решение находится с помощью, так называемого, исправленного метода Эйлера – метода Эйлера - Коши.
13

МЕТОД ЭЙЛЕРА-КОШИ
В основе метода ломаных Эйлера лежит идея графического построения решения дифференциального уравнения, однако этот метод дает одновременно и способ нахождения искомой функции в численной (табличной) форме.
Пусть дано уравнение (9)
с начальным условием
. (10)
Выбрав достаточно малый шаг h, построим, начиная с точки х0, систему равностоящих точек . Вместо искомой
интегральной кривой на отрезке рассмотрим (рис.2) отрезок касательной к ней в точке
(обозначим ее L1) с уравнением
При из уравнения касательной получаем: , откуда видно, что приращение значения
функции на первом шаге имеет вид: .
Аналогично, проводя касательную некоторой интегральной кривой семейства в точке , получим:
что при дает т. е. получается из
добавлением приращения
Таким образом, получение таблицы значений искомой функции по методу Эйлера заключается в циклическом применении пары формул:
(11)
Существуют различные уточнения метода Эйлера, повышающие его точность. Модификации метода обычно
направлены на то, чтобы более точно определить направление перехода из точки точку .
Метод Эйлера - Коши, например, рекомендует следующий порядок вычислений:
(12)
Геометрически это означает, что мы определяем направление интегральной кривой в исходной точке и во
вспомогательной точке , а в качестве окончательного берем среднее этих направлений.
В соответствии с методом Эйлера – Коши запишем итерационные уравнения нахождения значения скорости i+1
в следующий момент времени из предыдущего i (обозначим – шаг по времени).Обозначив
(13)
Тогда в момент времени t i+1 согласно методу Эйлера – Коши запишем формулы:
(14)
Тогда, подставляя (13) в формулы (14), в итоге получим:
14

Для ускорения процесса работы над задачей целесообразно вместо составления программы воспользоваться готовой прикладной программой (например, табличным процессором Excel).
В Excel в ячейках D2, D4, D6, D8 таблицы будем хранить соответственно значения шага вычислений , массы
«безпарашютиста» m, величины mg, коэффициента . Это связано с тем, что все константы удобно хранить в
отдельных ячейках, чтобы в случае их изменения не пришлось переписывать расчетные формулы Тогда для
вычисления значения в ячейке В4 нужно записать формулу:
=B3+$D$2/2*(($D$6-$D$8*B3^2)/$D$4+($D$6-
$D$8*(B3+$D$2*($D$6-$D$8*B3^2)/$D$4)^2)/$D$4)
и произвести автозаполнение столбца В.В столбце А в ячейку А4 нужно записать формулу: =СУММ(А3;$D$2) и произвести автозаполнение столбца А.
Построение графика .
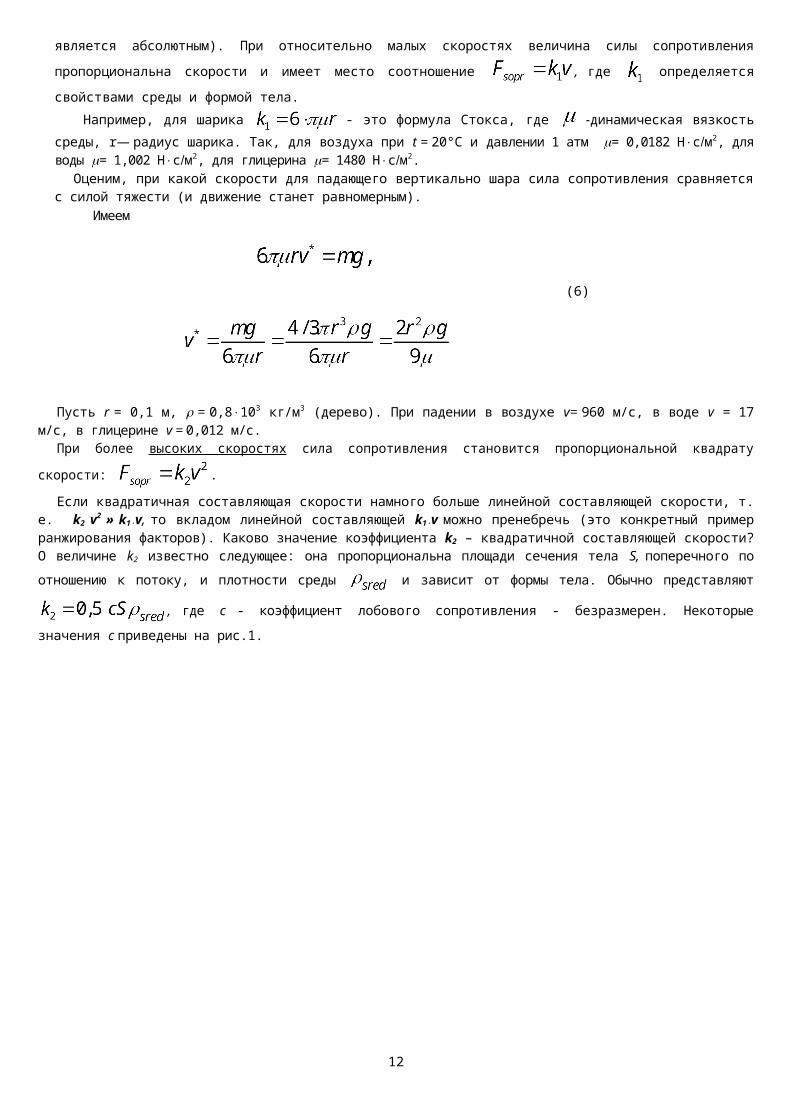
1. Выделить диапазон ячеек B3:B20, содержащий данные для построения графика. Значения из столбца A (диапазон A3:A20) будут откладываться по оси ОХ (ось времени), значения из столбца B (диапазон B3:B20) – по оси OY.
2. Выбрать команду Вставка, Диаграмма. С помощью мастера диаграмм провести построение графика в четыре этапа (шага).
Шаг 1.> В диалоговом окне Тип диаграммы на вкладке Стандартные выбрать тип диаграммы Точечная и вид – Точечная
диаграмма со значениями, соединенными сглаживающими линиями.> Щелкнуть на кнопке Далее.
Шаг 2.> В окне Источник данных диаграммы на вкладке Диапазон данных проверить, что диапазон данных выбран
правильно и установлен флажок опции Ряды в столбцах.> Выбрать вкладку Ряд и в поле Имя: ввести название графика Зависимость v от t. > Установить курсор в поле «Подписи оси Х» и занести диапазон ячеек по переменной t (1 столбец).> Щелкнуть на кнопке Далее.
Шаг 3.На этом шаге задаются параметры диаграммы (окно Параметры диаграммы).> На вкладке Заголовки ввести название диаграммы и наименования осей координат с указанием единиц измерения
величин, откладываемых по этим осям:— в поле Название диаграммы — График зависимости v от t;— в поле Ось X (категорий) — Время t, (с);в поле Ось Y (значений) — Скорость v, (м/c).В табл. 1 представлен небольшой фрагмент из Excel.Таблица 1Фрагмент таблицы
15

А В
1 t v
2
3 0 0
4=СУММ(АЗ;D2
)=B3+D2/2*((D6-D8*B3^2)/D4+
(D6-D8*(B3+D2*(D6-D8*B3^2)/D4)^2)/D4)
5=СУММ(А4;D2
)=B4+D2/2*((D6-D8*B4^2)/D4+(D6-D8*(B4+D2*(D6-
D8*B4^2)/D4)^2)/D4)
б =СУММ(А5;D2) =B5+D2/2*((D6-D8*B5^2)/D4+(D6-D8*(B5+D2*(D6-
D8*В5^2)/D4)^2)/D4)
7=СУММ(А6;D2
)=B6+D2/2*((D6-D8*B6^2)/D4+(D6-D8*(B6+D2*(D6-
D8*B6^2)/D4)^2)/D4)
16
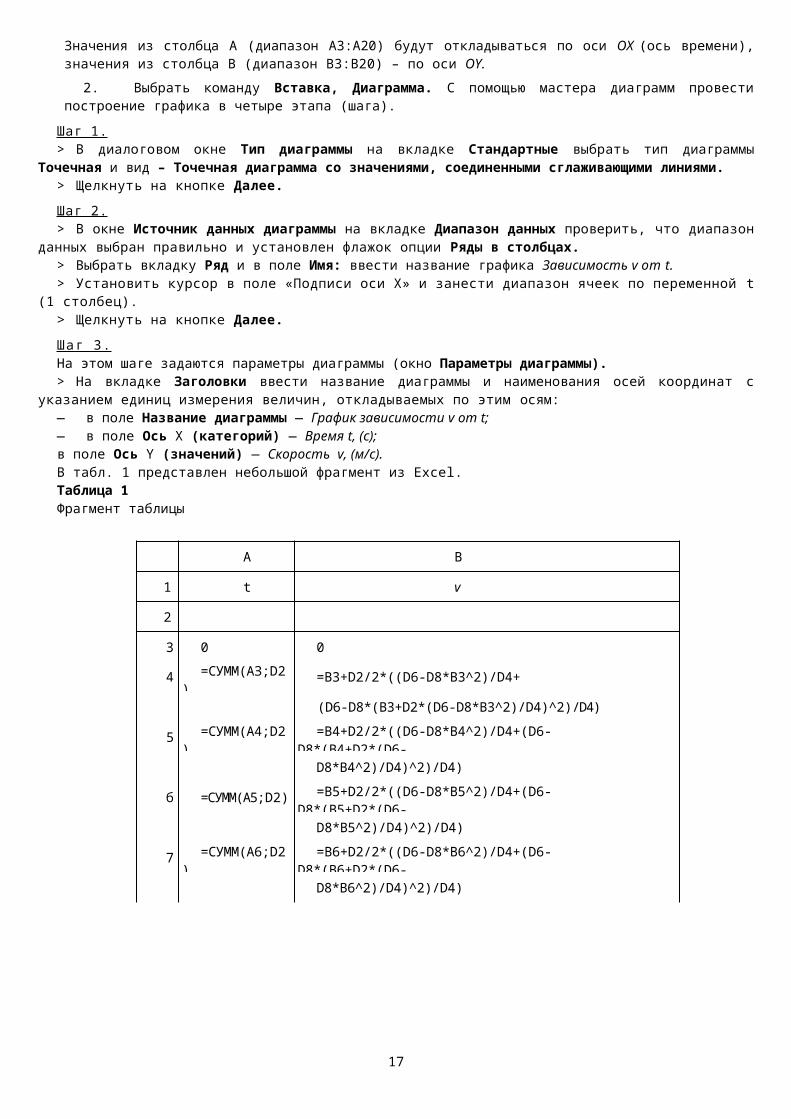
Таблица 2
Результаты вычислений, выполненных в табличном процессоре:
Примерно через 20 сек. после начала полета скорость стала постоянной и оставалась такой до
приземления. Отметим, что в рассматриваемой ситуации сопротивление воздуха радикально меняет характер движения; при отказе от его учета график скорости, заменился бы касательной к нему в начале координат.
Табличный процессор позволяет представлять результаты расчетов и в графической форме. Можно при работе над
задачей получить результаты двумя способами: с помощью табличного процессора и составлением собственной программы.
17

ДВИЖЕНИЕ ТЕЛА, БРОШЕННОГО ПОД УГЛОМ К ГОРИЗОНТУ. ЗАКОНЫ ПОДОБИЯ.Будучи брошенным, под углом к горизонту с начальной скоростью тело летит без учета
сопротивление воздуха (по параболе) и через некоторое время падает на землю. Решим задачу сначала без учета сопротивления. Разложим скорость на горизонтальную и вертикальную составляющие:
(1)
Движение по вертикали не равномерно. Оно является равнозамедленным до достижения верхней точки на траектории и равноускоренным после неё. Движение по горизонтали является равномерным. Для вертикальной составляющий
; Вычислим время достижения верхней точки траектории. Имеем в верхней точке , тогда в верхней точке
, . Отсюда время достижения верхней точки:
(2)
Высота этой точки равна:
(3)
Полное время до падения на землю ; за это время, двигаясь равномерно вдоль оси х со скоростью , тело пройдет
путь:
(4)
Для нахождения траектории достаточно из текущих значений х и у исключить t:
(5)
следовательно:
(6)
Уравнение (6) – уравнение параболы.Рассмотрим эту задачу с учетом сопротивление воздуха. При большой начальной скорости полета тела, сопротивление
воздуха может значительно изменить движение. Приступим к ранжированию и выясним какой из составляющих силы сопротивления (линейной или квадратичной) можно пренебречь.
Оценку проведем для шарика. (Она не зависеть от формы тела). Шарик радиусом r ≈ 0,1 м, движущиеся со скоростью 1 м/с, испытывает в воздухе линейную (по закону Стокса) силу сопротивления
и квадратичную силу сопротивления
Мы видим, что F1 и F2 различаются менее, чем в пять раз. Они одного порядка. Поэтому, если исследуется движение брошенного мяча, учитывается обе составляющие. Однако если моделируется полет снаряда, где скорость - сотни метров в
секунду, то линейной составляющей можно пренебречь. Запишем проекции уравнения (з. Ньютона) на оси х и у,
получим:
(7)
Поскольку в каждой точке траектории сила сопротивления направлено по касательной к траектории в сторону, противоположную движению, то
18

(8)
где θ – угол между текущим направлением скорости и осью х. Подставляя (8) в уравнения (7) и учитывая, что
, получаем уравнения движения в переменных
(9)
Поскольку представляет несомненный интерес и траектория движения, дополним систему (9) еще двумя уравнениями
(10)
Решая систему (9) и (10) получим четыре функции:
(9) и (10) описывает движение с учетом сопротивление среды.
Законы подобия и обезразмеривание.
На примере рассмотренной выше задачи, покажем очень важный и полезный прием, популярный в физическом моделировании, называемый обезразмериванием. При решении задач мы пользуемся системой единиц (СИ), в которой далеко не все числовые значения находятся в удобном диапазоне. Кроме того, абсолютные значения величин дают мало информации для качественного понимания. Скорость 15 м/с –это много или мало? Все дело - по сравнению с чем.
Идея обезмеривания заключается в переходе от абсолютных значений (расстояний, , t), скоростей, времен и т.д. к относительным, причем отношения строятся к величинам типичным для данной ситуации. В рассматриваемой ситуации это хорошо просматривается. В задаче без сопротивления воздуха мы имеем значения l, h, , полученные по формулам (2)-(4). Сопротивление воздуха изменит характер движения, и если мы введем в качестве переменных величины
X, Y, -- безразмерные расстояния по осям и времени - тогда при отсутствии сопротивления воздуха они будут изменяться в диапазоне от 0 до 1, а в задаче с учетом сопротивления отличия их максимальных значений от единицы ясно характеризуют влияние этого сопротивления. Для скоростей естественно ввести безразмерные переменные, соотнося проекции скорости на оси х и у с начальной скоростью :
Покажем, как перейти к безразмерным переменным в уравнениях системы (9) на примере второго уравнения этой системы.
Имеем:
,
так как постоянный множитель можно вынести за знак производной. Подставляя это в уравнение (9), получаем:
или
Подставляя получаем:
19

a
где a, b -- безразмерные комбинации параметров, входящих в исходные уравнения,
a
Выполним обезразмеривание во всех уравнениях систем (9), (10):
a
(11)
a
Начальные условия для безразмерных переменных:
Важнейшая роль обезразмеривания – установление законов подобия. У изучаемого движения есть множество вариантов, определяемых наборами значений параметров, входящих в систему уравнений (9) -- (10) или являющихся для них начальными условиями: . После обезразмеривания переменных появляются безразмерные комбинации параметров. В данном случае a, b, α – фактически определяют характер движения. Если мы изучаем два разных движения с разными размерными параметрами, но такие, что a, b, α – одинаковые , тогда движения будут качественно одинаковыми. Число таких комбинаций обычно меньше числа размерных параметров (в данном случае вдвое), что также создает удобства при полном численном исследовании задачи. Наконец, как уже отмечалось, величины физически легче интерпретировать, чем их размерные аналоги, так как они измеряются относительно величин, смысл которых очевиден. Прежде чем предпринимать численное моделирование, отметим, что при учете лишь линейной составляющей сила сопротивления модель допускает аналитическое решение.
Исследование задачи при произвольных значениях a, b, α будет выполняться на практике с помощью программы на языке Turbo Pascal.
ДВИЖЕНИЕ ТЕЛА С ПЕРЕМЕННОЙ МАССОЙ: ВЗЛЕТ РАКЕТЫ
Построим простейшую модель вертикального взлета ракеты. Приняв гипотезу, что ее масса уменьшается во время взлета по линейному закону (масса меняется со временем) :
где -- начальная масса ракеты, -- конечная (т.е. масса полезного груза, выводимого на орбиту), α – расход
топлива (это допущение согласуется с допущением о постоянной силе тяги). В данной задаче нельзя пренебречь убыванием массы ракеты в процессе взлета – оно огромно и составляет большую часть
исходной массы.У одной из крупнейших отечественных ракет «Энергия» стартовая масса составляет 20000 тонн, а к концу взлета всего 200
тонн.
20

Поиск математического описания проблемы не составляет труда – в его основе все тот же второй закон Ньютона. Поскольку ракета очень быстро набирает высокую скорость, то линейной составляющей можно пренебречь. Тогда
, и уравнение для скорости в проекции на вертикальную ось принимает вид
(1)
В коэффициент входит величина – плотность окружающей среды, которая на «космических» высотах во много раз меньше, чем на поверхности земли. На высоте 5.5 км плотность воздуха вдвое меньше, чем у поверхности, на высоте 11 км – в четыре раза меньше. Поэтому математически зависимость плотности атмосферы от высоты записывается формулой
где (высота h измеряется в метрах, - плотность вблизи поверхности Земли). Поскольку величина h меняется в ходе полета, уравнение для изменения h(t) следует добавить к уравнению (1) и записать следующую систему дифференциальных уравнений:
(2)
где с – коэффициент лобового сопротивления, S – площадь поперечного сечение.
21

ДВИЖЕНИЕ НЕБЕСНЫХ ТЕЛ
Как движется Земля и другие планеты в пространстве? Что ждет комету, залетевшую из глубин космоса в Солнечную систему? Многовековая история поисков ответов на эти вопросы о движении небесных тел хорошо известна; для многих людей, внесших большой вклад в науку, именно интерес к астрономии, устройству большого мира, был первым толчком к познанию.
По закону всемирного тяготения сила притяжения, действующая между двумя телами, пропорциональна их массам и обратно пропорциональна квадрату расстояния между ними. Если поместить начало системы координат на одном из тел (размерами тел по сравнению с расстоянием между ними будем пренебрегать), математическая запись силы, действующей на второе тело, имеет вид
(1)
Здесь -- гравитационная постоянная.
Знак «минус» в формуле связан с тем, что гравитационная сила является силой притяжения, т.е. стремиться уменьшить расстояние r между телами.
Далее мы ограничимся лишь изучением взаимного движения двух тел. При этом возникает вопрос: с какой позиции (в какой системе координат) изучать это движение? Ограничимся лишь простейшей ситуацией: рассмотрим движение одного из тел с точки зрения наблюдателя, находящегося на втором, например, движения планеты или кометы относительно Солнца. Разумеется, мы тем самым произвели ранжирование факторов, и наши последующие действия имеют отношение к реальности лишь в меру соблюдения определенных условий.
Уравнение, описывающее движение тела m в указанной системе координат, имеет вид
,
или в проекциях на оси x, y
(2)
Интересующая нас орбита сильно зависит от «начальной скорости» тела m и «начального расстояния». Мы взяли эти слова в кавычки, так как при изучении движения космических тел нет столь отчетливо выделенного «начального момента», как в ранее рассмотренных ситуациях. При моделировании нам придется принять некоторое положение условно за начало, а затем изучать движение дальше. Очень часто космические тела движутся практически с постоянной скоростью по орбитам, близким к круговым. Для таких орбит легко найти элементарное соотношение между скоростью и радиусом. В этом случае сила тяготения выступает в роли центростремительной, а центростремительная сила при постоянной скорости выражается известной из начального курса физики формулой Таким образом, имеем
или
(3)
-- искомое соотношение.Период движения по такой орбите
.
Заметим, что отсюда вытекает один из законов Кеплера, приведший Ньютона к открытию закона всемирного тяготения: отношение кубов радиусов орбит любых двух планет Солнечной системы равно отношению квадратов их обращения вокруг
Солнца, т.е. Более точная формулировка дана ниже (так как реально орбиты планет не вполне круговые). Если
соотношение (3) нарушено, то орбита не будет круговой. Выяснить, какой она будет, можно в ходе численного моделирования. Сведем (2) к системе четырех дифференциальных уравнений первого порядка:
(4)
В этой задаче особенно неудобно работать с размерными величинами, измеряемыми миллиардами километров, секунд и так далее. В качестве величин обезразмеривания удобно принять характерное расстояние от Земли до Солнца
м, период круговой орбиты , соответствующий этому расстоянию, скорость движения по ней , т.е.
принять
22

.
После обезмеривания получаем
(5)
Отметим, что в безразмерных переменных уравнения не содержат параметров. Отличает разные режимы движения друг от друга – начальные условия.
Можно доказать, что возможные траектории движения, описываемые уравнениями (5) – эллипс, парабола и гипербола.Напомним законы Кеплера
1. Всякая планета движется по эллиптической орбите с общим фокусом, в котором находится Солнце.2. Каждая планета движется так, что ее радиус-вектор за одинаковые промежутки времени описывает равные
площади. Это означает, что чем ближе планета к Солнцу, тем у нее больше скорость движения по орбите.3. Отношение кубов больших полуосей орбит двух любых планет равно отношению квадратов периодов их
обращения вокруг Солнце.Уравнения (5) описывают движение не только планет, но и любых тел, попадающих в поле тяготения большой массы.Все эти утверждения можно проверить и детально исследовать с помощью уравнений (5). При этом полезно использовать
свойство данной системы – сохранение полной энергии движущегося тела (консервативность). Полная энергия движущегося небесного тела m в системе двух тел имеет значение
Первое слагаемое – кинетическая, второе – потенциальная энергия.В безразмерных переменных
Наличие неизменного параметра в ситуации, когда изменяются Vx, Vy, X, Y, позволяет контролировать процесс решения системы дифференциальных уравнений, проверять устойчивость метода, подбирать шаг интегрирования.
ДВИЖЕНИЕ ЗАРЯЖЕННЫХ ЧАСТИЦ
Закон Кулона, описывающий взаимодействие точечных зарядов, так похож на закон всемирного тяготения, что очевидна близость подходов к моделированию движения заряженной частицы в электростатическом поле и движения малого небесного тела в поле тяжести.
Напомним закон Кулона: между двумя зарядами Q и q разных (одинаковых) знаков действует сила притяжения (отталкивания)
(1)
где Ф/м – так называемая электрическая постоянная, подробности – в любом курсе физики; Ф/м – «фарада
на метр».Первая из задач, которую можно рассмотреть – движение «малого» заряда некоторого знака в поле, создаваемом
«большим» неподвижным зарядом другого знака. Эта задача после обезразмериввания в точности та же, что и рассмотренная выше задача движения «малого» небесного тела. В электростатике, однако, есть возможность рассмотрения широкого круга задач, не имеющих аналога в гравитации. Перечислим важнейшие из них:
1) движение «малого» заряда в поле «большого» при взаимном отталкивании;2) движение заряженного тела в поле, созданном несколькими фиксированными зарядами произвольных
знаков;3) движение заряженного тела между пластинами конденсатора.
В последнем случае закон Кулона «в лоб» применить трудно – ведь заряженная пластина не может рассматриваться как «точечный заряд». При моделировании можно воспользоваться таким приемом: разбить пластину на несколько маленьких квадратиков, каждому из них приписать приходящиеся на его долю заряд и заменить пластину эффективным набором «точечных» зарядов, взаимодействующих с пролетающей частицей. Этот прием – замена непрерывного дробным (дискретизация) обсуждается в следующих разделах.
Моделируя движение заряда, можно получать самые замысловатые траектории, помогающие, с одной стороны, лучше понять закон Кулона, а с другой – научиться визуализации динамических процессов на компьютере.
Для решения первой задачи рассмотрим сначала модель, характеризующую движение «малого» заряда в поле «большого», если заряды имеют разные знаки.
Получаем
23

(2)
Как обычно, удобно провести обезразмеривание полученной системы. В качестве параметров, с помощью которых проводим обезразмеривание, можно выбрать те, которые характерны для движения «малого» заряда по круговой орбите. Предлагаем самостоятельно проделать эту работу, после чего получаем систему дифференциальных уравнений, практически полностью совпадающую с системой (5) движения небесных тел.
РАСПРЕДЕЛЕНИЕ ПОТЕНЦИАЛА ЭЛЕКТРОСТАТИЧЕСКОГО ПОЛЯ
Что стоит за электрической (кулоновской) силой, заставляющей двигаться заряженную частицу q? Ответ хорошо известен: электрическое поле , существующее в каждой точке пространства, созданное другими заряженными телами (которые будем считать неподвижными). Если это поле создается одним точечным зарядом Q, то величина напряженности
поля зависит от расстояния r от Q до данной точки пространства: ее направление – по радиусу от заряда
(если Q положителен)Поле это существует совершенно независимо от «пробного» заряда q и может рассматриваться как сплошная среда.
Существуют две взаимосвязанные характеристики электрического поля: напряженность Е (векторная характеристика) и
потенциал φ – скалярная. Для поля точечного заряда
Если поле создано не одним, а несколькими зарядами, то напряженность и потенциал в каждой точке можно найти из известного принципа суперпозиции:
где и создаются в этой точке i-м зарядом. По отношению к принцип суперпозиции означает необходимость
векторного сложения, к φ – «обычного» (с учетом отдельных потенциалов).Зная потенциал в каждой точке поля, т.е. функцию , можно найти напряженность в каждой точке чисто
математическим путем, отражающим тот факт, что проекция вектора напряженности на любое направление есть скорость изменения потенциала в этом направлении:
, , . (1)
Частным случаем (1) являются формулы для одного точечного заряда. Действительно,
фиксируем некоторую точку А поля на расстоянии r от заряда Q и введем локальную систему координат с центром в А; у этой системы ось r является продолжением радиуса-вектора , а две другие оси – х и y – перпендикулярны к ней. Примем,
что , и найдем , опираясь на формулы (1). Поскольку от х и у не зависит, то а
таким образом, -- т.е. мы пришли к известному результату о
величине и направлении поля, созданного точечным зарядом.Расчет электрического поля – важная в прикладном плане задача. В реальных конструкциях поле создается не одним-
двумя точечными зарядами, а достаточно причудливо расположенными в пространстве заряженными телами самых разнообразных форм: пластины, плоские и изогнутые; штыри; правильные и деформированные сфероиды и т.д. Для инженера и научного работника важно иметь наглядную картину поля, изображенного некоторым условным образом. Самое не удобное изображение, почти не используемое – нарисовать много стрелок, соответствующих напряженности поля в разных точках, так, чтобы длины стрелок были пропорциональны напряженностям. Такой рисунок является громоздким, стрелки на нем пересекаются, мелкие детали выявить трудно. Есть два классических способа для наглядного изображения поля: поверхностями (или линиями) равного потенциала и силовыми линиями поля.
Можно показать, что для любого электростатического поля множество точек, потенциал в которых одинаков, т.е. точек,
удовлетворяющих уравнению , при любом образует замкнутую поверхность (эквипотенциальную
поверхность). Для одного точечного заряда это сфера; в общем случае эта поверхность может быть очень сложной. Для многих технических приложений знать форму таких поверхностей просто необходимо – например, чтобы, располагая детали конструкции, избежать между ними большой разности потенциалов. Линии равного потенциала являются сечениями поверхности равного потенциала той плоскостью, в которой строится изображение.
Силовые линии, как известно, есть такие линии, касательные к которым в каждой точке задают направление вектора напряженности поля. Силовые линии никогда не пересекаются между собой. Они начинаются на положительных зарядах и либо заканчиваются на отрицательных, либо уходят «на бесконечность». По обычному соглашению число силовых линий, исходящих из точечного заряда, пропорционально величине этого заряда; коэффициент пропорциональности выбирается таким, чтобы изображение было легко читаемым.
Обсудим практический метод построения картины поверхностей равного потенциала для системы, состоящих из
24

нескольких точечных зарядов произвольной величины и знака, любым способом расположенных в пространстве. Введем некоторую систему координат, начало которой удобнее расположить в «пустой» точке, т.е. ни на одном из зарядов. Пусть в
этой системе координаты зарядов имеют значения , j = 1,2,…р – число зарядов.
Поскольку изображать трехмерные поверхности – дело достаточно сложное, рассмотрим вначале построение линий равного потенциала (изолиний), образованных сечением поверхности равного потенциала некоторой плоскостью; пусть, для определенности, это будет плоскость ху. Воспользуемся методом сеток, играющем моделировании свойств сплошных сред исключительно важную роль.
Выберем по осям х и у некоторые шаги hx и hy и покроем плоскость сеткой, образованной прямыми, параллельными осям х и у и отстоящими друг от друга на расстояниях hx и hy соответственно. Точки пересечения этих прямых – узлы сетки. Пронумеруем их так: начало координат (0,0), следующий по оси х вправо – (0,1), влево – (0,-1); по оси у вверх – (1,0), вниз --(-1,0) и т.д. Значения потенциала, создаваемого системой зарядов Q1……Qp в узле , согласно принципу суперпозиции, таково (здесь и ниже i – номер строки, к – столбца сетки):
.
Ограничимся прямоугольной областью в плоскости ху: [-mhx, mhx] по оси х и [-nhy, nhy] по оси у. В этой области узлов. Вычислим значение потенциала в каждом из них по указанным формулам; для ЭВМ эта задача
совершенно элементарна, даже если m и n составляют несколько десятков или сотен. В результате получим матрицу значений потенциала.
Фиксируем некоторое значение потенциала Ф и построим изолинию, соответствующую этом значению. Для этого проходим, к примеру, по i-ой горизонтальной линии сетки и ищем среди ее узлов такие соседние, значения потенциала в которых «захватывают» Ф между собой; признаком этого может служить выполнение неравенства
Если такая пара узлов найдена, то координату точки, в которой Ф = , найдем приближенно с помощью линейной интерполяции:
(2)
Найдя в данной горизонтали все такие точки, переходим к следующей горизонтали, пока не исчерпаем их все. Для этого надо совершить двойной циклический проход: во внешнем цикле перебирать i от –n до +n, во внутреннем перебирать к от –m до +m.
После этого следует аналогично заняться поиском нужных точек на вертикальных линиях сетки. Детали процедуры очевидны; формулы, аналогичные (2), имеют вид:
(3)
После прохождения всех горизонтальных и вертикальных линий сетки находятся все те точки на этих линиях, в которых потенциал равен . Проведя – мысленно или на бумаге – кривую, плавно проходящую через ближайшие точки, получаем
искомую изолинию (разумеется лишь в том случае, если значение выбрано разумно и такая линия есть в пределах
рассматриваемой области). Затем берем другие значения и повторяем указанную процедуру, получая таким образом семейство изолиний.
Программа построения линий равного потенциала.
Program Potential;Uses Ctr, Graf;Const N = 100; {размер сетки NxN}Var X, Y, Q, G : Array [1...10] Of Real; F : Array [ 0..N, 0..N] Of Real;I, J, M, L, K : Integer; A, B, R : Real;BeginWritleLn (‘Сколько зарядов? (не более 10)’); ReadLn (K);Write (‘Введите координаты х, у и величины зарядов q’);WriteLn (‘(координаты – в диапазоне 0-1)’);For I := 1 To K DoBegin Write (‘x[‘, I, ‘] =’);ReadLn (X[I]); Write (‘y[‘, I, ‘] =’); ReadLn (Y[I]);Write (‘q[‘, I, ‘] = ‘); ReadLn (Q[I]);End;For I := 0 To N DoFor J := 0 To N DoFor M := 1 To K Do
25
BeginR := Sqrt (Sqr (I / N – X[M]) + Sqr (J / N – Y[M]));If R>=1E-6 Then F [I, J] := F [I, J] + Q[M] / R Else F [I, J] := 1T+8End;Write (‘Сколько построить изолиний? (не более 10)’); readLn (l);WriteLn (‘Введите значения потенциала q для построения изолиний’);For I := 1 To L DoBegin Write (‘q[‘, I, ‘] = ‘); ReadLn (G[I]) End;DetectGraph (I, J); InitGraph (I, J, ‘’);For I := 1 To K DoBeginA := X[I] * GetMaxX; B := (1-Y[I])*GetMaxY;Circle (Round (A), Round (B), 4); FloodFill (Round (A), Round (B), GetColor);End;For M := 1 To L DoBeginB := G[M]; SetColor (M);For J := 0 To N – 1 DoIf (F[I, J] – B)*(F[I, J+1] – B) < 0Then BeginA := (J + (B_F[I, J]) / (F[I, J+1]-F[I, J])) /N;Circle (Round (I / N*GetMaxX), Round ((1-A)*GetMaxY), 1)End;For I ;= 0 To N DoFor I := 0 TO N -1 DoIf (F[I, J] – B)*(F[I+1, J] – B) < 0ThenBeginA := (I+(B-F[I, J]) / (F[I+1, J] – F[I, J])) / N;Circle (Round (I / N*GetMaxX), Round ((1-J / N)*GetMaxY), 1)EndEnd;SetColor (15); OutTextXY (10, 50, ‘для продолжения нажмите любую клавишу’);Repeat Until KeyPressed; CloseGraph;End.
Допустим, что между двумя ближайшими узлами выполняется записанное выше неравенство – означает ли это, что между ними действительно лежит одна точка, в которой Ф = ? Ответить не трудно, если потенциал между этими узлами меняется монотонно.
Даже если все заряды лежат в одной плоскости, поле существует и вне этой плоскости. Один из способов наглядного построения изображения поля – найти изолинии, соответствующие некоторому фиксированному набору значений ; в нескольких параллельных плоскостях и представить их на общем рисунке, дающем представление о поверхностях равного потенциала. Для этого программу, приведенную выше, следует слегка дополнить.
Метод сеток в разных задачах физики сплошных сред принимает разное обличие. Однако, во всех случаях за ним стоит общая идея, обладающая большой познавательной силой – идея дискретизации, т.е. представления непрерывной величины, имеющей бесконечно много значений, отдельными порциями, описываемыми конечным набором значений. Эта идея продуктивна не только в физике, но и в прикладной математике, информатике, других науках.
Для построения силовых линий поля можно поступить следующим образом. Выберем некоторую точку с координатами
и найдем в ней напряженность поля
по правилу суперпозиции
, , (4)
где
.
Проведем мысленно в точке касательную к ; координаты конца отрезка
, , . (5)
Тем самым получаем координаты точки А’, лежащей на касательной к силовой линии (вместо точки А, лежащей на самой
26

линии). Если h мало, то А’ близко к А. Далее, отправляясь от А’ , найдем по той же схеме следующую точку В’ вблизи силовой линии и т.д. Построение целесообразно начать вблизи какого-нибудь положительного заряда (если он есть) и закончить тогда, когда силовая линия подойдет вплотную к отрицательному заряду или уйдет «на бесконечность».
Построение картины силовых линий, дающих представление о поле – дело неформальное, требующее понимания физической сущности. Два семейства взаимно перпендикулярных линий – равного потенциала и силовых – дают весьма наглядную и исчерпывающую характеристику электростатического поля.
Учитывая трудности визуализации трехмерных изображений, целесообразно ограничится рассмотрением ситуаций, когда все заряды лежат в одной плоскости; тогда силовая линия, начинающаяся из любой точки данной плоскости, из этой плоскости не выйдет, и получится легко воспринимаемая картина. Способ получения формул (5) есть частный случай приема линеаризации – сведения сложной зависимости к простейшей линейной для малых расстояний (или времен). Это мощнейший прием в моделировании физических процессов и в построении многих методов численного анализа. Фактически он лежит в основе дифференциального исчисления – само понятие производной возникает при линеаризации функции.
1.12 МОДЕЛИРОВАНИЕ ПРОЦЕССА ТЕПЛОПРОВОДНОСТИ
Процесс теплопроводности – один из, так называемых, процессов тепломассопереноса, играющих огромную роль в природе и в технике. Другие процессы такого рода – диффузия, благодаря которой смешиваются разные жидкости или газы, процессы гидро и аэродинамики (переноса жидкостей и газов).
Хотя каждый из таких процессов имеет собственные закономерности, между ними много общего: 1) эти процессы происходят в сплошной среде; 2) при их математическом моделировании используется один и тот же математический аппарат – дифференциальные
уравнения в частных производных.Понятие «сплошная среда» широко используется в науке. Во многих ситуациях жидкости, газы, твердые тела можно
рассматривать как «сплошные», отвлекаясь от их молекулярного и атомарного устройства. Например, при изучении процессов распространения тепла или диффузии можно отвлечься от атомарного строения вещества и оперировать такими характеристиками как теплоемкость, теплопроводность, скорость диффузии и др., которые можно исследовать и практически использовать без выяснения их микроскопической природы.
В приближении сплошной среды свойства объекта описываются математически с помощью непрерывных функций координат и времени: f(x,y,z,t). За каждым свойством закрепляется своя функция, связь между ними дает полное описание среды.
Существующие задачи можно разделить на два класса: статические и динамические. В первом случае значения величин, характеризующих сплошную среду, не зависят от времени – f(x,y,z). Требуется найти их пространственное распределение – поле распределения. Во втором случае f(x,y,z,t) и нужно дать описание полей распределения во времени. Например, исследовать изменение температуры в разных точках тела, которое подогревается от источников тепла, интенсивность которых меняется со временем.
Ограничимся одной из самых простых задач данного класса – переносом тепла в однородном стержне. Рассмотрим линейный стержень, боковая поверхность которого не проводит тепла (теплоизолирована). Если в начальный момент стержень неравномерно нагрет, то в нем будет происходить перераспределение тепла; при отсутствии внутренних источников тепла его температура, в конце концов, выровняется.
Поскольку стержень линеен и однороден, то распределение температуры в пространстве характеризуется одной координатой х.
Температура (обозначим ее u) зависит от х; кроме того, она может меняться со временем, т.е. является функцией двух переменных u(x, t). Изменение этой функции вдоль стержня определяется производной х, и изменение ее со временем определяется производной по t. Они взаимосвязаны и входят в одно уравнение.
Уравнение теплопроводности. Получим уравнение, описывающее процесс изменения температуры в стержне. Фиксируем некоторую точку х0 и выделим около нее малый участок стержня длиной .
27

Искомое уравнение есть уравнение теплового баланса, т.е. изменение количества тепла в избранном участке стержня за счет притока и (или) оттока его через два сечения приведет к нагреванию или охлаждению этого участка в соответствии с его теплоемкостью. Выразим все это математическим языком.
Количество тепла, проходящее через поперечное сечение стержня в точке х0 за время , пропорционально площади
сечения S, градиенту температуры и промежутку времени : ~ .
Если с S и все очевидно, то появление требует пояснений. Из экспериментов известно, что поток тепла через
некоторый участок стержня длиной тем больше, чем больше разность температур на его концах и чем меньше
расстояние :
~
Вводя коэффициент пропорциональности к, называемый коэффициентом теплопроводности, получаем
(1)
Значение k определяется материалом стержня и в единицах системы СИ:
материал Теплопроводность (Вт/м·К)
МедьСтальКирпичДеревоВоздух
384470.70.10.034
Таким образом, различия в теплопроводности разных материалов огромны.Теперь запишем количество тепла, проходящее через сечение в точке . Оно определяется той же формулой:
с условием, что производная берется в точке . Для получения искомого уравнения ее надо выразить через
значение в точке х0.Имеем, ограничиваясь первым порядком приращения ,
в силу чего
(2)
Из (1) и (2) видно, что через сечения и за время прошло разное количество тепла, поэтому та его часть, которая пошла на нагревание (или, в зависимости от знака, на охлаждение) этого участка стержня, есть
U2U1
X0
·
X0+ΔxΔx
x x
28

Пусть за то же время температура участка изменилась на ; как известно, это связано с изменением , которое выражается соотношением , где m – масса, c – удельная теплоемкость. Приравняем два выражения для :
Поскольку массу можно представить как (ρ – плотность вещества), то, поделив обе части уравнения на и перейдя к пределу при , получим
.
В это выражение входят три постоянные, характеризующие вещество. Удобно объединить их в одну постоянную , где
-- так называемый, коэффициент температуропроводности. Обозначение удобно, так как фиксирует знак этого
коэффициента – он всегда положителен. Тогда перепишем уравнение в виде
(3)
Это – основное уравнение теплопроводности для однородного стержня. Как следует из процедуры вывода, это уравнение локально, т.е. в данный момент времени и в данной точке выражает закон сохранения энергии.
Уравнение (4) – одно из самых простых дифференциальных уравнений в частных производных. Несмотря на его элементарный вид, решение такого уравнения даже в простейшей ситуации есть весьма сложная задача.
Уравнение теплопроводности в трехмерном случае. Описанный выше вывод Уравнения теплопроводности достаточно элементарен. Рассмотрим вывод уравнения теплопроводности в трехмерном случае, используя более общий аппарат математического анализа.
Рассмотрим некоторое тело (V), ограниченное поверхностью (S). Закон сохранения энергии должен выполняться для любой части тела (V). По этому закону скорость изменения энергии в теле равна потоку энергии через его границу. Имеем для энергии в объеме V
,
где -- объемная плотность энергии.Поток энергии через границу тела S равен
,
-- поток энергии. В этих формулах фигурируют тройной и поверхностный (первого рода) интегралы. Закон сохранения энергии (интегральный) примет вид
= ,
Применяя к правой части теорему Остроградского – Гаусса, получаем
Поскольку это соотношение должно выполняться для любой части тела (V), то необходимо и достаточно, чтобы в любой точке и в любое мгновение t имело место равенство нулю подынтегрального выражения. Учитывая, что плотность энергии
пропорциональна температуре тела, а поток энергии пропорционален градиенту температуры, получаем (опуская детали) уравнение
, (5)
где -- температура в точке в момент t. Уравнение (5) является трехмерным аналогом уравнения (4).Далее будет продолжено лишь рассмотрение задачи о теплопроводности в стержне.
Начальные и краевые условия. Уравнение (3) описывают процесс изменения температуры стержня во времени и в пространстве. Для решения задачи надо знать распределение температуры в теле в некоторый начальный момент времени:
, (4)
где -- заданная функция. Кроме того, в тех местах, где возможен теплообмен с окружающей средой, надо знать условия этого теплообмена. Для стержня с теплоизолированной боковой поверхностью такими местами являются концы.
29

Пусть длина стержня l; если один конец имеет координату х = 0, а другой – х = l, то простейший вариант краевых условий – постоянная температура на каждом конце стержня:
, (5)
Нижеследующее утверждение физически очевидно, но его строгое математическое доказательство весьма непросто: дифференциальное уравнение (3) при начальном условии (4) и краевых условиях (5) имеет единственное решение.
Аналитические методы решения задачи одномерной теплопроводности существуют, но требуют значительной математической подготовки, к тому же решение обычно получается в виде ряда Фурье, и по его виду протекание процесса неочевидно. В двух- и трехмерном случаях аналитическое решение чаще всего получить не удается.
Используем методы конечных разностей. Покажем на примере уравнения теплопроводности наиболее распространенные методы численного интегрирования уравнений в частных производных. В их основе лежит прием дискретизации.
Покроем отрезок [a, b] одномерной сеткой (т.е. разобьем на n равных частей) с узлами в точках Искомую функцию u(x) будем аппроксимировать ее значениями в узлах сетки. Остановимся на разностной аппроксимации производных. Производная связывает значения в соседних узлах сетки.
Очевидная аппроксимация первой производной в точке имеет вид
(6)
Для крайних точек, однако, такая аппроксимация невозможна, и простейший способ – ограничится односторонними разностями:
, (7)
Выражения (6) и (7) дают простейшие аппроксимации. Рассматривая большое количество узлов, можно получить аппроксимации более высокого порядка. Аппроксимация вторых производных имеет вид
, i = 1, 2, …, n – 1 (8)
,
.
В уравнении (3) есть производная по t : Для нее также нужна аппроксимация, поэтому возникает еще одна –
временная сетка. При интегрировании уравнений по времени мы движемся по отдельным временным слоям, а в каждом слое определяем значения искомой функции на пространственной сетке. Если для интегрирования по времени используется метод Эйлера или другой одношаговый метод, то для работы со следующим временным слоем используются значения искомой функции из предыдущего слоя (для более сложных методов – из нескольких предыдущих слоев).
Далее будем индексы, соответствующие временной сетке, писать вверху (надстрочно), а пространственной – внизу
(подстрочно). Таким образом, для одномерного уравнения запись означает значение функции в k-м временном
слое и в i-м узле пространственной сетки. Рассмотрим уравнение теплопроводности (3) и сформулируем простейшую возможную схему его интегрирования –
явную схему первого порядка – по времени, используя метод Эйлера. По пространству – используем простейшие
аппроксимации (8). Шаг по времени обозначим , по координате – . Величина находится из
разностного уравнения
(9)
Это явная разностная схема по времени. Здесь к = 0, 1, …; i = 1, 2, …, n – 1 для внутренних узлов пространственной сетки. В силу начального условия (4)
,
где функция задана и определяет значение температуры при t = 0.
Значения на концах стержня и зависят от типа краевого условия (5), когда концы стержня поддерживаются при
постоянной температуре, имеем
= , = ,
где , -- заданные числа.Теперь остановимся на вопросе об устойчивости и эффективности метода. Поскольку схема (9) явная, тона относится к
условно устойчивым разностным схемам. Существуют разностные схемы:
30

абсолютно неустойчивые, абсолютно устойчивые условно устойчивые.
Первые при любых, сколь угодно малых, шагах так «раскачивают» начальную погрешность, что приводят к результатам, не имеющим общего с реальностью.
Вторые ни при каких шагах не «раскачиваются», хотя, конечно, чем меньше шаг, тем меньше разница между приближенными и точными решениями.
Третьи устойчивы при одних комбинациях значений и и неустойчивы при других. Доказано, что разностная схема (9) устойчива при
(10)
и неустойчива в противном случае.
Эффективность схемы можно представить лишь при сопоставлении с другой схемой того же назначения. Прежде всего, под эффективностью понимают возможность относительно быстро получить решение с достаточной точностью. Иногда оказывается не менее важным объем оперативной памяти под массивы, хранение которых неизбежно в данном методе. Схема (9) с точки зрения быстродействия мало эффективна, с точки зрения объема памяти – вполне удовлетворительна, так
как, получив значения на некотором временном слое, не обязательно сохранять в ОЗУ значения на предыдущем слое
(их можно вывести на диск или печать).Получим более эффективный и устойчивый метод. Он аналогичен переходу от метода Эйлера к одному из вариантов
метода Рунге – Кутта второго порядка. Усредним пространственный член уравнения (1.40) по времени:
(11)
Это лучшая, чем в (9) аппроксимация производной . Исследование показывает , что схема (11) (называемая в
литературе схемой Кранка – Николсона) абсолютно устойчива и более эффективна.Расплатой за эффективность является то, что (11) – неявная схема, т.е. не формула для непосредственного расчета, как
(9), а система линейных алгебраических уравнений для величин , , …, , которую еще предстоит решать
(поскольку неизвестные на (к + 1)-м временном слое величины входят и в левую, и в правую часть (11)). Поскольку
неявные схемы, как правило, устойчивей, к ним прибегают часто.Заметим, что (11) есть система специального вида – с трехдиагональной матрицей. В самом деле, если выписать первое,
последнее и некоторое промежуточное i-е уравнения, перенося неизвестные в левые части, получим
(1.49)Конечно, к таким системам можно применять стандартные методы решения систем линейных алгебраических уравнений,
но для них существует и специализированный высокоэффективный метод, называемый «методом прогонки».
Математическое моделирование в экономике.
Экономика может быть по праву отнесена к одной из труднейших (и интереснейших) наук, так как, изучая ее, в идеальном случае исследователь, помимо всего прочего, должен понять, как функционирует каждая ее часть.
Так же, как всякая наука, экономика должна уметь давать ответы на некоторые основные вопросы, ставящие перед ней: что производить? Где производить? Какова цена продукции? Какова зарплата лиц, занятых в производстве? Как соизмерить настоящие и будущие издержки? и т.п.
С чего начинать исследование? Прежде всего, нужно чутко выделить факторы, которые существенно влияют на принимаемые решения.
Выбрав определенную программу деятельности экономической системы , теоретически мы воздействуем на всю экономическую систему, практически же – лишь на очень малую часть ее. Соответственно при выделении факторов, влияющих на принимаемые решения нужно учитывать те из них влияние которых наиболее ощутимо.
Для моделирования экономики применяют не одну модель, а систему моделей. В этой системе есть модели, описывающие разные стороны экономики. Есть модели экономики страны, есть модели экономических явлений на отдельном предприятии или даже модель одного экономического события. При составлении модели экономики сложного объекта производят так называемое агрегирование. При этом ряд родственных параметров объединяют в один параметр, тем самым общее количество параметров уменьшается. На этом этапе важную роль играют опыт и интуиция. В качестве параметров можно выбрать не все характеристики, а наиболее важные.
31

Известно, насколько важно для решения экономических задач планирование – как при рыночной, так и при плановой экономике. Обычно для решения экономической проблемы существует много способов (стратегий). Отнюдь не равноценных по затратам финансов, людских ресурсов, времени исполнения, а также по достигаемым результатам. Наилучший из способов по отношению к выбранному критерию (критериям) называют оптимальным .
Мы рассмотрим лишь один из разделов – оптимальное планирование – и внутри него одну из моделей, так называемое, линейное программирование. Это связано с относительной простотой и ясностью как содержательной постановки соответствующих задач, так и методов решения. О таких интересных, но более сложных проблемах, как выпуклое программирование, динамическое программирование, мы лишь упомянем. Отметим еще, что термин «программирование» в названии этих разделов теории оптимального планирования весьма условен, связан с историческими обстоятельствами и к программированию в общепринятом сейчас смысле прямого отношения не имеет.
Оптимизационные модели.
Изучаемый процесс описывается математической моделью М, т.е. имеется совокупность соотношений, связывающих некоторые параметры, определяющие ход процесса. Из множества всех этих параметров будем выделять множество переменных управления , т.е. значения этих переменных в распоряжении того, кто управляет процессом.
Поскольку можно количественно оценить результат каждого действия, каждого управления, то это значит, что известна функция Ф (целевая функция), сопоставляющая каждому возможному в данной модели управлению число Ф(u).
Целенаправленная деятельность, как правило, предполагает наилучшее её использование, т.е. в зависимости от целей управления нас будет интересовать такое допустимое управление , на котором достигается либо максимальное значение (u):
,
либо минимальное значение Ф(u):
.
Задачи такого типа носят название экстремальных или оптимизационных задач.В зависимости от вида модели M и функции Ф(u) используются различные методы для решения соответствующих
оптимизационных задач. Познакомимся с этими методами на конкретных примерах. Приведем примеры экономических задач линейного программирования.Пример1. На некотором предприятии могут выпускать изделия двух видов (например, мотоциклы и велосипеды). В
силу ограниченности возможностей сборочного цеха в нем могут собирать за день либо 25 мотоциклов (если не собирать вообще велосипеды), либо 100 велосипедов (если не собирать вообще мотоциклы), либо какую-нибудь комбинацию тех и других, определяемую приемлемыми трудозатратами. Склад может принять не более 70 изделий любого вида в сутки. Известно, что мотоцикл стоит в два раза дороже велосипеда. Требуется найти такой план выпуска продукции, который обеспечил бы предприятию наибольшую выручку.
Такого рода задачи возникают повседневно в огромном количестве, но в реальности число изделий гораздо больше двух, да и дополнительных условий тоже больше. Решить подобную задачу путем перебора всех мыслимых вариантов часто невозможно даже на ЭВМ. В нашем примере, однако, в ЭВМ нет необходимости – задача решается очень легко.
Обозначим число выпускаемых за день мотоциклов х, велосипедов – у. Пусть τ1 – время (в часах), уходящее на производство одного мотоцикла, а τ2 – одного велосипеда. Из условия задачи следует, что τ1=4τ2. Если завод работает круглосуточно, то, очевидно, при одновременном выпуске обоих изделий
τ1.х + τ2
.у ≤ 24,или
4τ1.х + τ2
.у ≤ 24, 4х + у ≤ .
Но - число максимально производимых велосипедов, равно 100. Итак, возможности производства определяют условие
4х + у ≤ 100.Еще одно условие – ограниченная емкость склада:
x + у ≤ 70Обозначим цену мотоцикла а1 (руб.), цену велосипеда – а2(руб.). По условию а1 = 2а2. Общая цена дневной продукции
S= a1.x + a2
.y = 2a2.x + a2
.y = a2. (2x + y).
Поскольку a2 – заданная положительная константа, то наибольшего значения следует добиваться от величины f = (2x + y).
Итак, учитывая все условия задачи, приходим к ее математической модели: среди неотрицательных целочисленных решений системы линейных неравенств
(1)
найти такое, которое соответствует максимуму линейной функции f = (2x + y). (2)
32
70
,1004
ух
ух
2
24
2
24

Функция (2) называется целевой функцией.Проще всего решить эту задачу чисто геометрически. Построим на плоскости (х,у) область, соответствующую
неравенствам (1) и условию неотрицательности х и у. Эта область выделена жирной линией. Это область допустимых планов – четырехугольник OABC. Всякая точка области удовлетворяет неравенствам (1) и неотрицательности переменных. Тонкие линии –это линии уровня целевой функции. На рисунке –это семейство прямых, удовлетворяющих уравнению f = (2x+y)=С (с разными значениями константы С). Вполне очевидно, что наибольшему возможному значению f, совместному с предыдущими условиями, соответствует одна из этих линий, соприкасающаяся с областью М в точке В .
33

Графическое решение задачи об оптимальном плане производства.
Этой линии соответствует значение f =80. Линия правее хоть и соответствует большему значению f , но не имеет общих точек с М, левее – соответствует меньшим значением f. Координаты точки В(10,60) - искомый оптимальный план производства. Таким образом, x=10, y=60.
Отметим, что нам повезло, т.к. решение (х,у) оказалась целочисленным. Если бы прямые
пересеклись в точке с нецелочисленными координатами, мы бы столкнулись со значительными проблемами. Еще
больше их было бы, если бы завод выпускал три или более видов продукции.
Прежде чем обсуждать возникающие при этом математические проблемы, дадим формулировки нескольких классических задач линейного программирования в общем виде.
Пример 2. Транспортная задача. Некий продукт (например, сталь) вырабатывается на m заводах Р1,Р2,...,Рm, причем ежемесячная выработка составляет а1,а2,…,аm тонн, соответственно. Пусть эту сталь надо доставить на предприятия Q1,Q2,…,Qk (всего k) , причем b1,b2,…,bk – ежемесячная потребность этих предприятий. Наконец, пусть задана стоимость cij
перевозки одной тонны стали с завода Pi на предприятие Qj . Естественно считать, что общее производство стали равно суммарной потребности в ней:
а1+а2+…+аm = b1+b2+…+bk . (1)Необходимо составить план перевозок, при котором1) была бы точно удовлетворена потребность в стали предприятий Q1,Q2,…,Qk;2) Была бы вывезена вся сталь с заводов Р1,Р2,...,Рm;3) Общая стоимость перевозок была бы наименьшей.Обозначим через xij количество стали (в тоннах), предназначенной к отправке с завода Pi на предприятие Qj . План
перевозок состоит из (m.k) неотрицательных чисел xij (i = 1,2,…,m; j = 1,2,…,k).
Таблица 1.Схема перевозок стали
34

Первое условие примет вид
(2)
Второе условие примет вид
(3)
Раз стоимость перевозки одной тонны из Pi в Qj равна cij , то общая стоимость S всех перевозок равна S = c11 x11+c12x12+ … +c1kx1k+c21x21+c22x22+ … +c2kx2k+ … +
+cm1xm1+cm2xm2+ … +cmkxmk (4) Таким образом, мы приходим к следующей чисто математической задаче: дана система m+k линейных алгебраических
уравнений (3), (4) с m·k неизвестными (обычно m.k>>m+k) и линейная функция S Требуется среди всех неотрицательных решений данной системы найти такое, при котором функция S достигает наименьшего значения
(минимизируется ): .Практическое значение этой задачи огромно, её умелое решение в масштабах нашей страны могло бы экономить
ежегодно огромные средства.Пример 3. Задача о диете. Пусть у врача-диетолога имеется n различных продуктов F1,F2, … ,Fn, из которых надо
составить диету с учетом их питательности. Пусть для нормального питания человеку необходимо m веществ N1,N2, … ,Nm. Предположим, что за месяц каждому человеку необходимо g1 кг вещества N1, g2 кг вещества, N2, … , gm кг вещества Nm. Для составления диеты необходимо знать содержание питательных веществ в каждом продукте. Обозначим через aij
количество i-го питательного вещества, содержащегося в одном килограмме j-го продукта. Всю эту информацию представляют в виде, так называемой, матрицы питательности .
МАТРИЦА ПИТАТЕЛЬНОСТИ
Предположим, что диетолог уже выбрал диету, т.е. определил, что человек должен за месяц потреблять h1 кг продукта F1 , … ,hn кг продукта Fn. Полное количество питательного вещества N1 будет
η1α11 + η2α12 + … +ηnα1n.По условию требуется, чтобы его, по крайней мере, хватило
η1α11 + η2α12 + … +ηnα1n ≥γ1.Точно то же и для остальных веществ. В целом η1αi1 + η2αi2 + … +ηnαin ≥γi. (i = 1,2,…,m). (5)
Эти условия определяют наличие минимума необходимых питательных веществ. Диета, для которой выполнены условия (5) – допустимая диета. Предположим, что из всех допустимых диет должна
быть выбрана самая дешевая. Пусть πi – цена 1 кг продукта Fi. Полная стоимость диеты, очевидно, S = π1η1 + π2η2 + … + πn ηn. (6)
Таким образом, мы пришли к задаче: найти неотрицательное решение η1, … , ηn системы неравенств (5), минимизирующее выражение (6): .
вQ1 в Q2 в Q3 …
в Qk Отправлено
Из Р1 x11 x12 x13 … x1k a1
Из Р1 x21 x22 x23 … x2k a2
.
.
.
.
.
.
.
.
.
.
.
.
………
.
.
.
.
.
.Из Р1 xm1 xm2 xm3 … xmk am
Привезено b1 b2 b3 … bk
35
....
....................................
,...
,...
21
222212
112111
kmkkk
m
m
bxxх
bxxx
bxxx
....
....................................
,...
,...
21
222221
111211
kmkmm
k
k
axxх
axxx
axxx

В задачах линейного программирования имеется нечто общее. Каждая из них требует нахождения наиболее выгодного варианта в определенной экономической ситуации. С чисто математической стороны в каждой задаче требуется найти значение нескольких неизвестных так, чтобы
1) все эти значения были неотрицательны;2) удовлетворяли системе линейных уравнений или линейных неравенств;3) при этих значениях некоторая линейная функция имела бы минимум (или максимум). Таким образом, линейное
программирование – это математическая дисциплина, изучающая методы нахождения экстремального значения линейной функции нескольких переменных при условии, что последние удовлетворяют конечному числу линейных уравнений и неравенств.
Запишем это с помощью формул: дана система линейных уравнений и неравенств
(7)
и линейная функция f = c1x1 + c2x2 + … +cnxn (8)
Требуется найти такое неотрицательное решение х1 ³ 0, х2 ³ 0, … ,хn ³ 0, (9)
системы (7), чтобы целевая функция f принимала наименьшее (или наибольшее) значение. Условия (7) называются ограничениями данной задачи, а функция f –целевой функцией.
36
³
³
³
,...
......
,...
,...
,...
......
,...
,...
,22,11,
2,222,211,2
1,122,111,1
2211
22222121
11212111
kmnnkmkmkm
mnnmmm
mnnmmm
mnmnmm
nn
nn
bxaxaxa
bxaxaxa
bxaxaxa
bxaxaxa
bxaxaxa
bxaxaxa
Межотраслевой баланс
Идея сбалансированности лежит в основе всякого рационально функционирующего хозяйства. Суть ее в том, что все затраты должны компенсироваться доходами хозяйства. Если угодно, это некоторый социальный аналог известных законов сохранения. Посмотрим, к каким результатам может привести формализованное выражение баланса всего народного хозяйства.
Прежде всего понятно, что без значительных предположений об агрегировании не обойтись. Будем считать, что хозяйство состоит из n отраслей, производящих каждая свой продукт. (В используемых на практике межотраслевых балансах n имеет порядок сотен.) Вот деятельность этих отраслей мы и постараемся сбалансировать. Схематически это сделано в табл.1.
Таблица 1
Отрасли производства1 2 . . . n
общ
ее п
ром
ыш
ленн
ое и
пр
оизв
одст
венн
ое п
отре
блен
ие
Конечный продукт
теку
щее
не
прои
звод
стве
нное
по
треб
лени
е
нако
плен
ие
прои
звод
стве
нны
х ф
ондо
в
общ
ая п
роду
кция
Отрасли производства 1 x11 x12 … x1n
2 x21 x22 … x2n
. . . n xn1 xn2 … xnn
Заработная плата z1 z2 … zn
Доход 1 2 … n
Общая продукция 1 2 … nn
u1
u2
.
.
.
un
1
2
.
.
.
n
1
2
.
.
.
n
1
2
.
.
.
n
Для того чтобы лучше разъяснить принципы построения межотраслевого баланса, ограничимся условно только четырьмя отраслями производства:
1– производство электроэнергии, 2 – топливная промышленность, 3 – черная металлургия и 4 – легкая промышленность.Величина xij выражает объем продукции i-й отрасли затрачиваемой при функционировании j-й отрасли. Например, x11 –
количество электроэнергии, затрачиваемое при производстве электроэнергии, x12 – количество электроэнергии, затрачиваемое в топливной промышленности. Электроэнергия расходуется и в черной металлургии, и в легкой промышленности, и эти потребности определяет соответственно величины x13 и x14. Однако электроэнергию потребляют не только перечисленные отрасли производства. Потребителями являются население, транспорт, культурные учреждения и др.
Обозначим объем конечного продукта j-й отрасли через νj. Он складывается из непроизводственного потребления α j
(включая и вложения в непроизводственные фонды) и накопления производственных фондов β j. Если общий объем производства j-й отрасли обозначить ωj, то приходим к следующим соотношениям:
ωj=uj+ νj , j=1, 2, 3, 4,
где
uj= и νj= αj+ βj.
37

Эти уравнения получаются в результате суммирования по строкам и указывают, как используется и распределяется произведенная продукция. Например, первое из них (j=1) означает, что вся произведенная электроэнергия ω1 распределяется между четырьмя отраслями производства (u1=x11+x12+x13+x14) непроизводственным потреблением и накоплением (ν1=α1+β1).
Матрица межотраслевого баланса может строиться как в натуральной(тонны металла и т.п.), так и в стоимостной форме (в каких-то базовых неизменных ценах). В дальнейшем будем иметь в виду именно последнюю форму баланса.
Однако отрасль можно анализировать не с точки зрения распределения ее продукции, а с точки зрения затрат на производство в данной отрасли. Так, для получения продукции черной металлургии требуются и электроэнергия, и топливо, и изделия легкой промышленности (спецодежда и т.п.).
Помимо этого, в i-й отрасли имеются затраты на заработную плату, равные zi, а также доход I, возникающий при реализации продукта отрасли.
Таким образом, для затрат на производство продукции i-той отрасли можно записать следующее равенство:
, i = 1, 2, 3, 4. (1)
Например, последнее из них (i=4) означает, что стоимость продукции легкой промышленности равна стоимости затраченных в ней продуктов всех четырех отраслей плюс заработная плата работников легкой промышленности и доход, полученный от реализации продуктов легкой промышленности.
Совокупность величин ν1, ν2, …, νn представляет собой национальный доход в его отраслевой структуре, а ν = ν1 + ν2 + … + νn – суммарный национальный доход.
Рассмотренные нами балансовые соотношения представляют собой большую ценность, так как на их основе могут рассчитываться многие важные экономические характеристики – коэффициенты прямых и полных затрат и др. Действительно, из уравнений связи затрат и выпуска продукции можно подсчитать затраты продукта i-й отрасли на выпуск единицы продукта k-й отрасли на выпуск единицы продукта k-й отрасли. Эти числа aik и являются коэффициентами прямых затрат.
Так, например, коэффициент прямых электроэнергии на продукцию металлургии составляет.
Однако расход электроэнергии на металл не исчерпывается непосредственными затратами ее. На металл расходуется топливо, в производстве которого тоже используется электроэнергия, и эти затраты электроэнергии должны быть учтены как связанные с производством металла.
Если произвести аналогичным образом подсчет всех затрат, приходящихся на единицу конечного продукта, то будут определены коэффициенты полных затрат. Отметим, что полные затраты могут существенно отличаться от прямых.
Вычисление экономических показателей все же не главное, для чего используются модели межотраслевого баланса. С помощью этих моделей можно произвести увязку потребностей и ресурсов в рамках всего народного хозяйства. Действительно, с помощью коэффициентов прямых затрат выразим величины xik через объемы производства соответствующих отраслей (xjk=ajk ωk) и подставим их в соотношение (1). Получаем
ωj == ajk ωk + νj , j =1, 2, 3, 4.
Понятно, что для случая n отраслей нужно просто 4 заменить на n, т.е.
ωj = ajk ωk + νj, j =1, 2 …, n. (2)
С математической точки зрения соотношения (2) представляют собой систему из n линейных алгебраических уравнений с 2n неизвестными – объемами производства ωj и объемами конечного продукта νj. Однозначно определить 2n неизвестных из n уравнений невозможно, но, к счастью, это и не нужно. Дело в том, что перед тем как определить производственные планы всех отраслей, а именно это мы и хотим сделать, ведется большая предплановая работа, связанная с разного рода экономическими прогнозами. Эти прогнозы касаются всех существенных сторон жизни общества – политические и демографические прогнозы, прогнозы ресурсов, прогнозы потребностей населения в различных видах продукции и многие, многие другие. На основании этих прогнозов с той или иной степенью точности могут быть заданы объемы конечного продукта νj. Тогда в системе n уравнений (5) окажется ровно n неизвестных ωj – объемы производства, – которые и могут быть найдены путем решения системы уравнений.
Замечание. Иногда оказывается целесообразным лишь частично задавать величины νj, а частично – величины ωj. Это не меняет дела. Важно то, что должно быть задано n величин, а остальные n могут быть найдены аналитически.
Рассмотренная нами модель получила название статической модели межотраслевого баланса. Основной ее недостаток состоит в том, что она не позволяет установить связи между планами производства отраслей и планами капитальных вложений, обеспечивающих развитие этих отраслей, т.е. модель не учитывает динамику самой экономики. Для того чтобы учесть ее, было предложено некоторое обобщение описанной модели, получившее название динамической модели межотраслевого баланса. Основное ее отличие от статической состоит в том, что объемы капитальных вложений в каждый
38

год здесь не предполагаются известными, а находятся из модели. Прежде чем познакомиться с динамической моделью межотраслевого баланса, введем ряд обозначений. Пусть:
xi(t) – объем продукции i-й отрасли в t-м году планового периода;T – продолжительность планового периода (в годах);bij – капитальные затраты продукции i-й отрасли в t-м году, обеспечивающие увеличение продукции j-й отрасли на
единицу;kij
r – доля капитальных вложений продукции i-й отрасли для увеличения продукции j-й отрасли за r лет до завершения строительства от всего объема капитальных вложений продукции i-й отрасли в увеличение продукции j-й отрасли;
– период от начала капиталовложений до получения за их счет дополнительной продукции;уi
|(t) – конечная продукция i-й отрасли в t-м году за вычетом капиталовложений, связанных с расширением производства;
– изменение объема продукции j-й отрасли.
Используя введенные обозначения, динамическую модель межотраслевого баланса можно описать следующей системой уравнений:
xi(t) = aij(t) xj(t) + bij(t) kij2 (t + r) + yi (t).
объем затраты на затраты на конечная продукцияпродукции производство капитальные без затратi-той отрасли вложения капиталовложений
( i = 1,2, …, n; t = 1, 2, …, T ). Из этой модели аналогично предыдущему находятся объемы продукции отраслей в каждый год планируемого периода, а
также затраты на капитальные вложения в отраслевой и временной структуре.Мы не будем останавливаться на других балансовых моделях, так как две, нами рассмотренные, дают ясное
представление об идеях, лежащих в их основе. Отметим только, что на практике находят применение многие модификации этих моделей. В частности, широко используются модели топливно-энергетического баланса, межрайонные, межотраслевые модели, позволяющие сбалансировать и отраслевую, и территориальную структуру народного хозяйства, а также многие другие.
39

Теория систем. Системный анализ. Система и виды систем.
Общая теория, изучение сложной взаимосвязи между элементами объективной реальности, носит название теории систем.
Совокупность методов изучения реальных систем с использованием математических моделей называется системным анализом.
Система – это часть объективной реальности, ограниченная рядом условий. Она состоит из более мелких единиц – элементов, связанных между собой различными отношениями (связями).
Всё, что находится за пределами системы, называется окружающей средой.Система и окружающая среда разделены оболочкой – границей системы. окружающая среда
прямая связь
обратная связь
сложная связь
Экосистема относится к разряду систем, именуемых крупно-масштабными (сложными) и имеет следующие характеристики:
1. Сложность:Количество и разнообразие видов связей между элементами систем, а также между системой и окружающей средой очень
велико.Различают: а) статическую (структурную) сложность; б) динамическую сложность.2. Целостность: система имеет свойства, которые становятся явными только в результате взаимодействия её отдельных
элементов.3. Многомерная устойчивость: способность системы поддерживает свою структуру более или менее стабильно на
протяжении некоторого отрезка времени. Устойчивость для экологических систем это сохранение числа видов и их количественного соотношения в данном сообществе.
4. Наблюдаемость.Информацию о предыдущем состоянии системы можно получить исходя из её нынешнего состояния.5. Управляемость: система может переходить из одного состояния в другое в течение определенного промежутка
времени. Система называется управляемой, если на неё можно оказать целенаправленное воздействие.
Структура в экологической системе характеризуется:
I физическими (химическими) условиями II биологическими условиями III временная структура (эволюция системы). Функции экосистемы обусловлены характером циркуляции вещества и энергии, взаимодействием элементов,
входящих в систему, а также взаимосвязью между экосистемой и окружающей средой. Для анализа системы можно ввести следующие переменные
di (возмущ. переменная) (входная xi yi (выходная переменная) переменная)
xi учитывает воздействие окружающей среды на систему [биологическое, химическое, метеорологическое, географическое положение]
E2
E3E1
E4
E1 E2
E2E1
Ui
(переменная состояния)
40

yi характеризует реакцию системы на воздействие окружающей среды
Обычно системы считаются:– изолированными;– открытыми;– замкнутыми (не происходит обмена энергией, веществом и информацией с окружающей средой).
Это в большинстве случаев идеализации реальной действительности.
Основные этапы системного анализа.
1. Выбор проблемы;2. Постановка задачи и ограничение степени ее сложности;3. Установление иерархии;4. Выбор путей решения задач;5. Моделирование, оценка возможных стратегий;6. Внедрение результатов.
вербальная модель – словесное описание (реферат).
Соотношение между моделью и реальной системой.
Модель не всегда адекватна реальной системе. Нужно учитывать только те процессы, которые влияют на систему в действительности.
41

Характер математических моделей. Математические модели можно разделить на следующие группы:
Детерминированные – основаны на внутреннем описании системы Стохастические – модели, которые используют вероятности. Эмпирико-статистические . Экосистема – использует эмпирическую информацию о системе. С помощью
методов статистики строят модели, позволяющие установить связь между входными и выходными переменными.
Кроме того, математические модели можно разделить на:1. Динамические модели и стационарные модели (не меняются во времени).2. Однородные по пространству и пространственно неоднородные
3. Непрерывные и дискретные t0, t1, t2, t3 . . .
N0, N1, N2, N3 . . . 4. Аналитические и численные
Устойчивость систем.При моделировании экосистем исследуются системы уравнений вида
Поведение системы можно представить с помощью множества траекторий в n-мерном пространстве, координатами которого выступают переменные системы (например, плотность видов, входящих в систему). Такое пространство называется фазовым. Тогда состояние системы в данный момент времени представляется в виде точки в этом пространстве.
Каждой точке фазового пространства можно поставить в соответствие вектор или стрелку, указывая направление движения системы. Соединив вектора друг с другом получим траектории, которые дают представление о поведении системы в течение длительного времени.
Точка покоя (положительного равновесия ) – точка, с которой связан вектор, имеющий нулевую длину. Если система в данный момент времени находится в точке покоя, то она останется в ней и в следующий момент времени.
Точка покоя может быть устойчивой и неустойчивой .
Если система, будучи выведенной из положения равновесия неким малым возмущением, вновь возвращается в это положение, то такое положение равновесия называется устойчивым (или, точнее, локально устойчивым).
Если же система при этом начнет удаляться от первоначального положения, то такое положение равновесия называется неустойчивым .
в случае, когда система из любого начального положения движется к одной определенной точке покоя, это есть глобально устойчивая точка покоя.
Фазовый портрет
А – устойчивое равновесие B – неустойчивое равновесие
Колебания
42

Б – затухающие колебания А – расходящиеся колебания
В – экспоненциально приближающиеся к равновесию
Г – экспоненциально удаляющиеся от равновесия
43

КОМПЬЮТЕРНОЕ МОДЕЛИРОВАНИЕ В ЭКОЛОГИИ
ВВЕДЕНИЕ.
Классическая экология - наука о взаимодействии организмов и окружающей среды. Сегодня, говоря об экологии, чаще всего имеют в виду не классическую, а, так называемую, социальную экологию, оформившуюся как научное направление и направление общественно-политической деятельности на 100 лет позднее, и занимающуюся проблемами охраны окружающей среды, взаимодействием с ней человеческого сообщества.
В 1869 году немецкий естествоиспытатель Эрнст Геккель предложил составной термин «экология» («эко» - дом, жилище, местопребывание и «логос» - наука, знание) как название раздела биологии, ставшего самостоятельным.
В данном курсе мы ограничимся некоторыми классическими моделями, так называемой, «старой» классической экологии, что обусловлено следующими причинами:
Во-первых, они достаточно просты и изучены, постановка их вполне очевидна и в познавательном плане интересна и полезна.
Во-вторых, современные модели распространения загрязнений окружающей среды требуют использования весьма сложного математического аппарата.
Проблемы охраны окружающей среды чрезвычайно важны, но их обсуждение выходит за пределы данной темы. Однако, для того, чтобы дать представление о задачах, стоящих перед современными исследователями в этой области, в следующем параграфе приведено описание одной из глобальных моделей, пытающихся выяснить пути взаимодействия экосистемы планеты с индустриальной и экономической системами современного общества.
Остановимся на некоторых понятиях, которые будут встречаться в этом курсе.Под особью понимается отдельный индивидуум, отдельный организм. Популяция- это совокупность особей одного вида,
существующих в одно и тоже время и занимающих определенную территорию. И, наконец, сообщество - это совокупность совместно сосуществующих популяций.
В классической экологии рассматриваются взаимодействия нескольких типов: взаимодействие организма и окружающей среды; взаимодействие особей внутри популяции; взаимодействие между особями разных видов (между популяциями).
Математические модели в экологии используются практически с момента возникновения этой науки. И, хотя поведение организмов в живой природе гораздо труднее адекватно описать средствами математики, чем самые сложные физические процессы, модели помогают установить некоторые закономерности и общие тенденции развития отдельных популяций, а также сообществ. Кажется удивительным, что люди, занимающиеся живой природой, воссоздают ее в искусственной математической форме, но есть веские причины, которые стимулируют эти занятия. Вот некоторые цели создания математических моделей в классической экологии:
1.Модели помогают выделить суть или объединить и выразить с помощью нескольких параметров важные разрозненные свойства большого числа уникальных наблюдений. что облегчает экологу анализ рассматриваемого процесса или проблемы.
2.Модели выступают в качестве «общего языка», с помощью которого может быть описано каждое уникальное явление, поэтому относительные свойства таких явлений становятся более понятными.
3.Модель может служить образцом «идеального объекта» или идеализированного поведения, при сравнении с которым можно оценивать и измерять реальные объекты и процессы.
4.Модели действительно могут пролить свет на реальный мир, несовершенными имитациями которого они являются.При построении моделей в математической экологии используется опыт математического моделирования механических
и физических систем, однако, с учетом специфических особенностей биологических систем: сложности внутреннего строения каждой особи; зависимости условий жизнедеятельности организмов от многих факторов внешней среды; не замкнутости экологических систем; огромного диапазона внешних характеристик, при которых сохраняется жизнеспособность систем.
Привлечение компьютеров существенно раздвинуло границы моделирования экологических процессов. С одной стороны, появилась возможность всесторонней реализации сложных математических моделей, не допускающих аналитического исследования, с другой - возникли принципиально новые направления, и прежде всего - имитационное моделирование.
44

Основные модели классической экологии.
§1. Модели внутривидовой конкуренции.
Рассмотрим простейшую из указанных моделей для вида с дискретными периодами размножения, в которой численность популяции в момент времени t равна Nt и изменяется во времени пропорционально величине чистой основной скорости воспроизводства R. К таким видам относятся, например, большая часть растений, некоторые виды насекомых, у которых разные поколения четко разнесены во времени. Коэффициент R характеризует количество особей, которое воспроизводится в расчете на одну существующую. Данная модель может быть выражена уравнением геометрической прогрессии
Nt+1= Nt * R; (1)
решение, которого имеет вид:
Nt=N0*Rt; (2)
гдe N0- начальная численность популяции. Эта модель, однако, oписывает популяцию, в которой отсутствует конкуренция и в которой R является константой. Если R>1, то численность популяции будет бесконечно увеличиваться. В реальности в какой-то момент начинают работать, механизмы сдерживания роста популяции. В литературе приводится немало интересных примеров быстрого роста численности популяций, если бы для их размножения существовали идеальные условия. Особенно это относится к насекомым, растениям и микроорганизмам, которые могли бы покрыть земной шар толстым слоем, если им создать благоприятные условия для размножения. Но в действительности такого роста популяций, когда их численность увеличивается в геометрической прогрессии, на сколько-нибудь длительных промежутках времени не наблюдается.
Следовательно, в первую очередь необходимо изменить уравнение (2) таким образом, чтобы чистая скорость воспроизводства зависела oт внутривидовой конкуренции.
Конкуренцию можно определить как использование некоего ресурса (пиши, воды, света, пространства) каким-либо организмом, который тем самым уменьшает доступность этого ресурса для других организмов. Если конкурирующие организмы, принадлежат к одному виду, то взаимоотношения между ними называют внутривидовой конкуренцией, если же они относятся к разным видам, то отношения называют межвидовой конкуренцией.
Рис. 1. К вопросу oб ограничении скорости роста популяции.
Изменим уравнение (1)в зависимости от внутривидовой конкуренции. На рис.1. показана возможная простейшая зависимость скорости воспроизводства от численности популяции Nt. Точка А отражает ситуацию, в которой численность популяции близка к нулю, конкуренция при этом практически отсутствует, и фактическую скорость воспроизводства вполне можно описывать параметром R в его первоначальном виде. Следовательно, при низкой плотности популяции уравнение (2) вполне справедливо. В преобразованном виде оно выглядит так:
(3)Точка В, напротив, отражает ситуацию, в которой численность популяции высока, и в значительной степени проявляется
внутривидовая конкуренция. Фактическая скорость воспроизводства в результате конкуренции настолько снижена, что популяция в целом может не более чем восстанавливать в каждом поколении свою численность, потому что количество родившихся особей уравновешивается количеством погибших. Этой гипотезе, отраженной на рис.1, соответствует уравнение:
45

(4)
где
Это уравнение является моделью роста популяции, ограниченного внутривидовой конкуренцией. Суть этой модели в том, что константа R в уравнении (1) заменена на фактическую скорость воспроизводства, т.е. R/(1 + a Nt) которая уменьшается по мере роста численности популяции Nt. Достоинство полученного уравнения заключается в его простоте. Такой тип конкуренции приводит к саморегуляции численности популяции, изображенной на рис. 2 (для некоторого набора параметров модели; численное решение).
Рис. 2.Изменение численности популяции согласно уравнению (4) при R=2, К=200, N0=20 Далее может быть получена гораздо более общая модель, учитывающая интенсивность конкуренции. Простейшая из
возможных зависимостей падения скорости роста популяции от ее численности, изображенная на рис.1, является не законом природы, а всего лишь удобной гипотезой. Далеко не всегда реальная динамика численности популяции, определяемая внутривидовой конкуренцией, даже качественно согласуется с изображенной на рис.2. Более общая гипотеза о законе падения скорости роста популяции в зависимости oт ее численности приводит к следующему уравнению:
(5)
В отличие от уравнения (4) модель (5) более общая, т. к. в нее введен параметр b, который определяет тип зависимости падения скорости роста популяции от ее численности.
Набор величин α, b, R можно использовать для сравнения и противопоставления сильно различающихся ситуаций. Другим положительным качеством уравнения (5) является его способность освещать новые стороны реального мира. Путем анализа кривых динамики популяций, полученных с помощью уравнения, можно прийти к предварительным выводам относительно динамики природных популяций.
На рис. 3, а, б, построенных с помощью численного моделирования, показаны различные варианты динамики численности популяции, полученные с помощью уравнения (5) при разном сочетании параметров b и R.
Рис.3, а. Монотонное установление стационарной численности популяции при b = 1.4 , R = 2
46

Рис.3, б. Колебательное установление стационарной численности популяции при b=3.9, R=2.
Исследования модели (5) приводят к построению на фазовой плоскости (b, R) границ, которые разделяют монотонное затухание, затухающие колебания, устойчивые предельные циклы и случайные (хаотические) изменения. Для этого надо задаться значениями α и N0 и производить расчеты, изменяя параметры b, R. Различить каждый из возможных режимов можно попытаться визуально, выполняя построение на экране компьютера графиков изменения численности популяции и запоминая соответствующие значения параметров b, R при переходе от одного режима к другому. Следует, однако, понимать, что установление различий между квазипериодическими, апериодическими и хаотическими движениями – сложная математическая задача. Для ее решения используются методы преобразований Фурье и другие, рассмотрение которых выходит за пределы данной работы.
Рис.4. Схематическое изображение фазовой диаграммы динамики численности популяции с дискретным размножением.
§2. Логистическое уравнение
До сих пор мы рассматривали модели, применимые к популяциям с дискретными периодами размножения. Но в природе встречаются и популяции, где рождение и гибель организмов происходит непрерывно; для таких популяций модели, выраженные предыдущими уравнениями непригодны.
Рассмотрим популяцию с непрерывным размножением и построим модель изменения ее численности N. Математическим аппаратом здесь являются дифференциальные уравнения. Скорость роста численности в этом случае можно обозначить
, тогда средняя скорость увеличения численности в расчете на одну особь определяется величиной .
Без учета внутривидовой конкуренции получаем
или
47

(1)
Через r обозначено приращение численности за единицу времени в пересчете на одну особь. Понятно, что численность популяции при r > 0 будет неограниченно возрастать, т.е. будет наблюдаться экспоненциальный рост.
Теперь попробуем учесть внутривидовую конкуренцию. Для этого воспользуемся методом, который однажды уже применяли (см. рис. 1).
Обратимся к рис. 5. Когда численность популяции близка к нулю, скорость роста определяется величиной r , так как конкуренция еще не оказывает влияния на прирост популяции (точка А). Когда же при возрастании N достигается значение К (предельной плотности насыщения), скорость роста популяции снижается до нуля (точка В).
Записав уравнение прямой АВ, получим
(2)
Рис.5. Зависимость скорости воспроизводства от численности популяции.
Последнее уравнение известно под названием «логистического». Одно из его достоинств – простота. Уравнение относится к ОДУ и допускает аналитическое решение:
48

(3)В истории экологии логистическое уравнение сыграло значительную роль, оказав большое влияние на применение в
экологии математических методов. С другой стороны, простота уравнения накладывает ограничения на область его применения, так как с его помощью можно описать немногие реальные популяции. Но, несмотря на все ограничения, логистическое уравнение используется как составная часть в других моделях динамики численности популяций, рассматриваемых ниже.
Изменение численности популяции в соответствии с формулами (2)–(3) иллюстрирует рис.6.
Рис. 6. Динамика численности популяции при N0 = 25, К = 200, r = 3.
§3. Логистическая модель межвидовой конкуренции.
Сущность межвидовой конкуренции заключается в том, что у особей одного вида уменьшается плодовитость, выживаемость и скорость роста в результате использования того же ресурса, что и особями другого вида, причем влиянию конкуренции в той или иной мере подвергаются особи обоих видов.
Для двух различных популяций введем соответствующие обозначения:
Пусть N1, N2 — численности первой и второй популяций.
К1, К2 – предельные плотности насыщения первой и второй популяций.
г1 и r2 – максимальные врожденные скорости роста первой и второй популяций.
Обратимся к логистическому уравнению (2) и попробуем учесть в нем межвидовую конкуренцию. Сделаем это так.
Предположим, что М особей вида 2 оказывают такое же воздействие на вид 1, как одна особь вида 1. Константу в этом
случае называют коэффициентом конкуренции.
Обозначим ее 12 .Таким образом, чтобы отразить суммарное воздействие на вид 1, надо в логистическом уравнении (2) в
числителе дроби вместо N записать . Аналогично получается уравнение для исследования численности второй популяции. В результате получаем систему двух дифференциальных уравнений:
(4)
Модель межвидовой конкуренции, выраженная этой системой, названа в честь ее авторов «моделью Лотки–Вольтерры».Заметим, что если коэффициенты 12 или 21 больше единицы, то влияние со стороны конкурирующей популяции на
особей данного вида сильнее, чем со стороны особей своего вида.Изобразим графически динамику численности двух популяций при следующих данных: r1= 2, r2=4, К1=200, К2=180,
12=0,5, 21=0,65, N1(0)=100, N2
(0)=25.
49

Рис.7. Устойчивое сосуществование популяций при r1= 2, r2=4, К1=200, К2=180, 12=0,5, 21=0,65, N1(0)=100,
N2(0)=25. Устойчивое сосуществование достигается лишь при а12 • а21 < 1. Сплошная линия – численность первой
популяции, штриховая – второй.
Главный вопрос, который интересует исследователя межвидовой конкуренции – при каких условиях увеличивается или уменьшается численность каждого вида? Для ответа на этот вопрос надо построить фазовую плоскость, где были бы изображены все возможные сочетания численностей N1, N2. На таких диаграммах численность одного вида, например, N1
откладывают по горизонтальной оси, а другого – по вертикальной. При одних сочетаниях численностей N1, N2 будет отмечаться рост выбранной для наблюдения популяции, при других – уменьшение ее численности. Также для каждого из видов можно провести изоклины – линии, вдоль которых не наблюдается ни увеличения, ни уменьшения численности (численность постоянна).
Рассмотрим, как можно построить изоклину на фазовой плоскости для первого
вида. По определению, для этой линии . . Из первого уравнения системы (4) получаем
Это равенство выполняется, если какой-либо из множителей равен нулю. Наибольший интерес представляет ситуация, в которой
,получим уравнение изоклины для вида 1:
.
50

Рис. 8. Изоклины, полученные с помощью модели Лотки-Вольтерры. Длины стрелок пропорциональны изменению численности, стрелки указывают направление изменения численности
Таким образом, получено уравнение изоклины, которое, как можно заметить, является уравнением прямой в плоскости (N1, N2). Вверх и вправо от изоклины из-за высокой численности обеих популяций численность вида 1 снижается, в противоположных направлениях – повышается. Аналогично можно построить изоклину для вида 2. На рис. 8 построены соответствующие изоклины, и показано изменение численности популяций.
Рис.9. Результаты конкуренции, полученные с помощью модели Лотки-Вольтерры при различных параметрах. На рисунке а в зоне I численность обеих популяций падает; в зоне II – численность первой популяции растет, второй уменьшается; в зоне III -численность обеих популяций увеличивается.
Для решения поставленной выше задачи объединим и одной фазовой плоскости изоклины для обоих видов и будем
51

одновременно исследовать динамику их численности. Изоклины относительно друг друга располагаются четырьмя различными способами, что дает различный исход конкуренции. Пи рис.9 представлены результаты конкуренции, полученные с помощью системы уравнений (4), заимствованные из книги М. Бигона и др. «Экология».
§4.Динамика численности популяций хищника и жертвы.
Рассматривая динамику численности популяций хищника и жертвы, экологи прежде всего стремятся понять ее закономерности и разъяснить различия между типами динамик. В простейших моделях хищник и жертва рассматриваются безотносительно влияния на них других видов. Одна из самых первых и простых моделей была предложена, как и модель межвидовой конкуренции, Лоткой и Вольтеррой, и носит их имя.
Модель, состоит из двух компонентов: С – численность популяции хищника и N – численность популяции жертвы.Предполагается, что в отсутствие хищника популяция жертвы растет экспоненциально. Чем больше численность той и
другой популяции, тем чаще происходят встречи. Число встреченных и съеденных жертв будет зависеть от эффективности, с которой хищник находит и ловит жертву. Если обозначить через а' “эффективность поиска”, то скорость поедания жертвы будет равна а'·С·N, и окончательно для численности жертвы получаем
.В отсутствие пищи отдельные особи хищника голодают и гибнут. Предположим вновь, что численность хищника в
отсутствие пищи будет уменьшаться экспоненциально:
(q – смертность). Скорость рождения новых особей в данной модели полагается зависящей от двух обстоятельств: скорости потребления пищи а'·С·N , и эффективности f , с которой эта пища переходит в потомство хищника. Итак, для численности хищника окончательно получаем
Так как процессы надо рассматривать вместе, объединим уравнения в систему:
(10)
Как и в предыдущем пункте, свойства этой модели можно исследовать, построив изоклины. Для жертвы имеем
,
или , выражая С, получаем
Соответствующее уравнение изоклины для популяции хищника
Если поместить обе изоклины на одном рисунке, получим картину взаимодействия популяций (рис.16).
52

Рис.10. Динамика численности популяции хищника и жертвы. Численность обеих популяций совершает периодические колебания
Как видно на рис.10. численности популяций хищника и жертвы совершают периодические колебания: при увеличении численности хищников уменьшается численность популяции жертвы и наоборот. Такие колебания численности будут продолжаться в соответствии с моделью до тех пор, пока какое-либо внешнее воздействие не изменит численность популяций, после чего произойдет переход в новое устойчивое состояние ( такая ситуация называется «нейтральные устойчивые циклы»).
Рис.17. Динамика численности популяции хищника и жертвы приr=5, а' = 0,1 , q = 2 , f = 0,6, N0 = 150 , C0 = 50. Сплошная линия – численность жертвы, штриховая–хищника
53
















![[7] KMM FIKIH](https://img.pdfslide.net/doc/110x75/5695d5191a28ab9b02a40c7a/7-kmm-fikih.jpg)