Embed Size (px)
Citation preview
Knowledge Aided
Engineering Manufacturing
and Related
Technologies
Informatica Grafica Ing. Michele Antolini [email protected] (Prof. a contratto)
Dipartimento di Meccanica - Politecnico di Milano

KAEMaRT Michele ANTOLINI
About me
! Classe 1981
! Laurea Triennale e Specialistica in Ingegneria Informatica, Politecnico di Milano 2007
! Dal 2009 Dottorando di Ricerca presso il Politecnico di Milano
! Campi di ricerca: dispositivi haptic e realtà virtuale
KAEMaRT Michele ANTOLINI
Haptics
• I dispositivi haptic sono in grado di fornire stimoli al senso del tatto
• Spesso sono bracci robotici il cui volume di lavoro è confrontabile, a seconda del modello speci!co, con quello del polso, dell’avambraccio o dell’intero braccio umano (alcuni modelli sono anche più grandi)
• Il braccio robotico possiede una serie di sensori in grado di rilevare lo spostamento dell’end e!ector (impugnato dall’utente) o la forza su di esso applicata, simulando e"etti !sici, reazioni vincolari (cerniere, giunti sferici, cinematismi in genere) e collisioni tra oggetti rigidi o deformabili
• Si può simulare quindi la presenza di oggetti
• Un altro tipo di dispositivo haptic, detto tattile, simula principalmente il contatto sulla pelle generando caratteristiche come ruvidità, attrito, etc.

KAEMaRT Michele ANTOLINI
Haptics
• Attività a distanza (teleoperations) • Controllo aeroveicoli, attività in ambienti pericolosi, scala macro/micro
1 2
3
KAEMaRT Michele ANTOLINI
Haptics
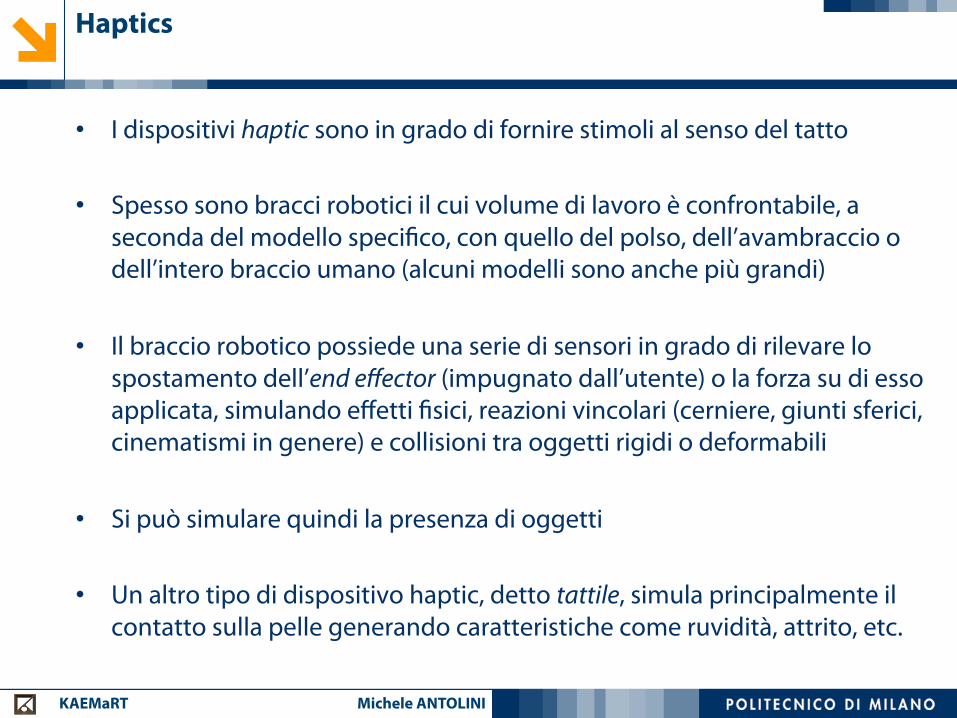
• Prototipi virtuali • Ritorno di forza, percezione di forme, scultura/modellazione virtuale • Training medico • Sensable - http://www.sensable.com/

KAEMaRT Michele ANTOLINI
Haptics
• Vibrazione • Stretch della pelle o estrusione di pin (http://www.cim.mcgill.ca/~haptic/
laterotactile/papers/VL-VH-HS-08/)
KAEMaRT Michele ANTOLINI
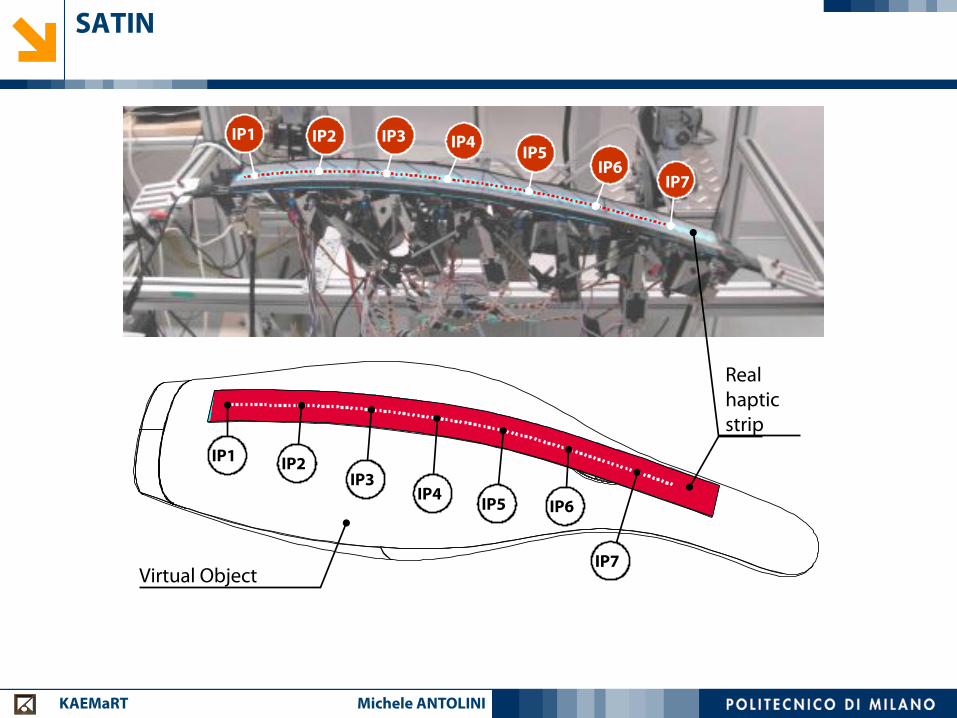
SATIN - Sound And Tangible Interface for Novel product design
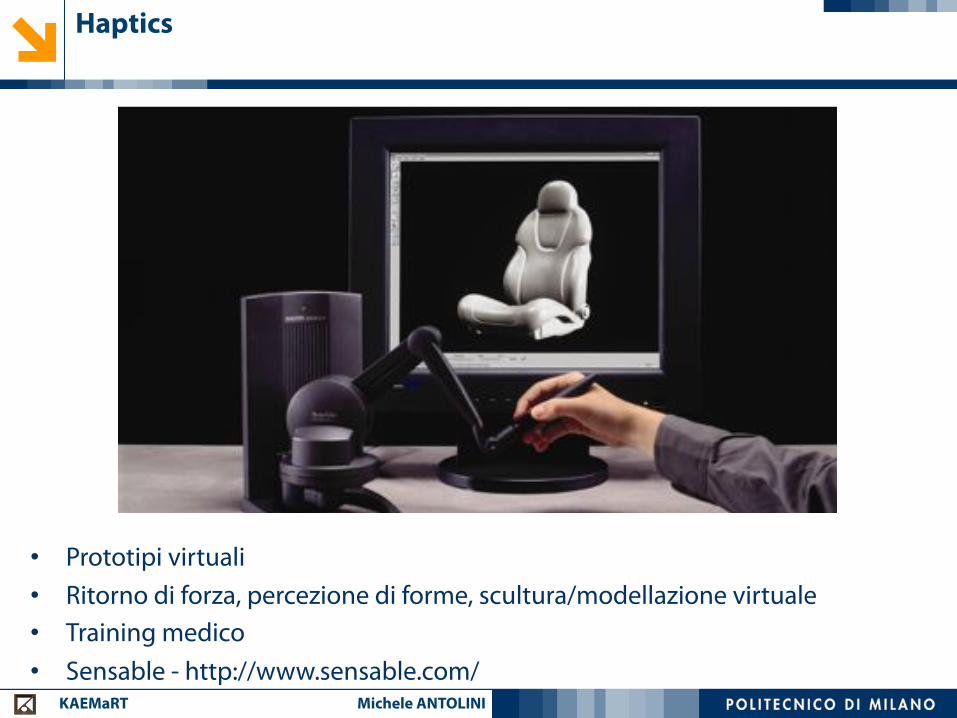
• Dispositivo haptic lineare, attuato da
servo motori ed opportunamente sensorizzato, in grado di conformarsi secondo una curva o una super!cie (con alcuni limiti)
• L’utente indossa occhiali 3D, vede un oggetto virtuale ed è in grado di percepirne la forma tramite il senso del tatto
KAEMaRT Michele ANTOLINI
SATIN
IP1 IP2IP3
IP4 IP5 IP6
IP7
IP6IP7
IP1 IP2 IP3 IP4 IP5
Virtual Object
Real hapticstrip
KAEMaRT Michele ANTOLINI
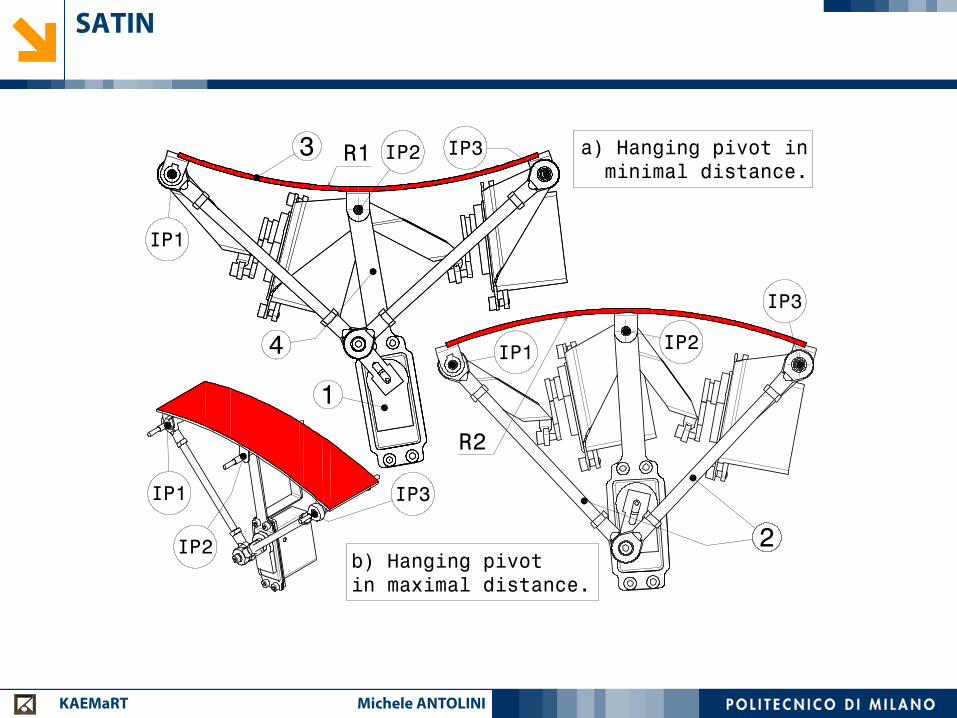
SATIN
R2
R1
IP1 IP2
IP3
a) Hanging pivot inminimal distance.
3
4
1
2
IP1
IP2 IP3
b) Hanging pivot in maximal distance.
IP3
IP2
IP1

KAEMaRT Michele ANTOLINI
SATIN
http://www.youtube.com/SATINproject

KAEMaRT Michele ANTOLINI
HNAVI
Haptic Navigation System • Sistema in grado di indicare la direzione da seguire utilizzando
esclusivamente il senso del tatto
• Viene utilizzato l’e"etto giroscopico derivante dall’inclinazione dell’asse di rotazione di un volano rotante
KAEMaRT Michele ANTOLINI
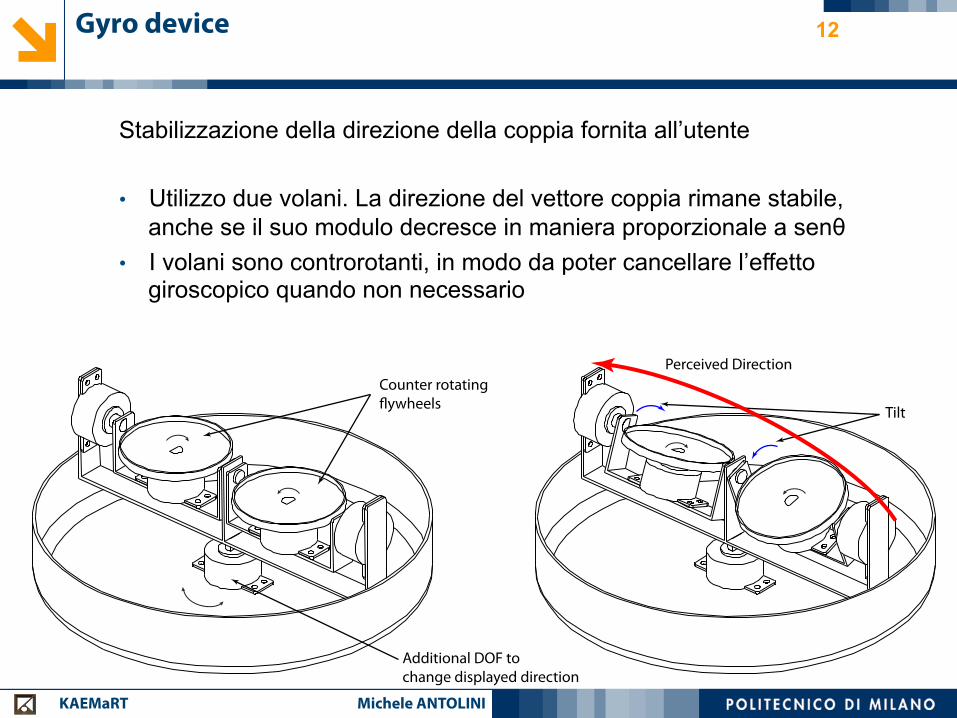
12 Gyro device
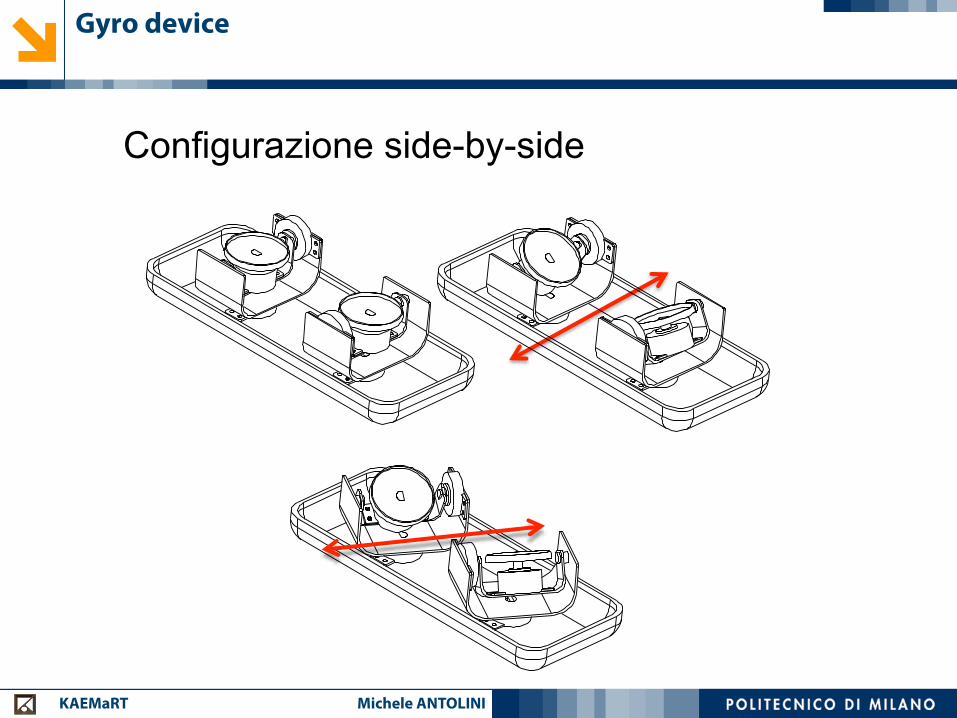
Stabilizzazione della direzione della coppia fornita all’utente • Utilizzo due volani. La direzione del vettore coppia rimane stabile,
anche se il suo modulo decresce in maniera proporzionale a senθ • I volani sono controrotanti, in modo da poter cancellare l’effetto
giroscopico quando non necessario
Perceived Direction
Tilt
Counter rotating!ywheels
Additional DOF to change displayed direction
KAEMaRT Michele ANTOLINI
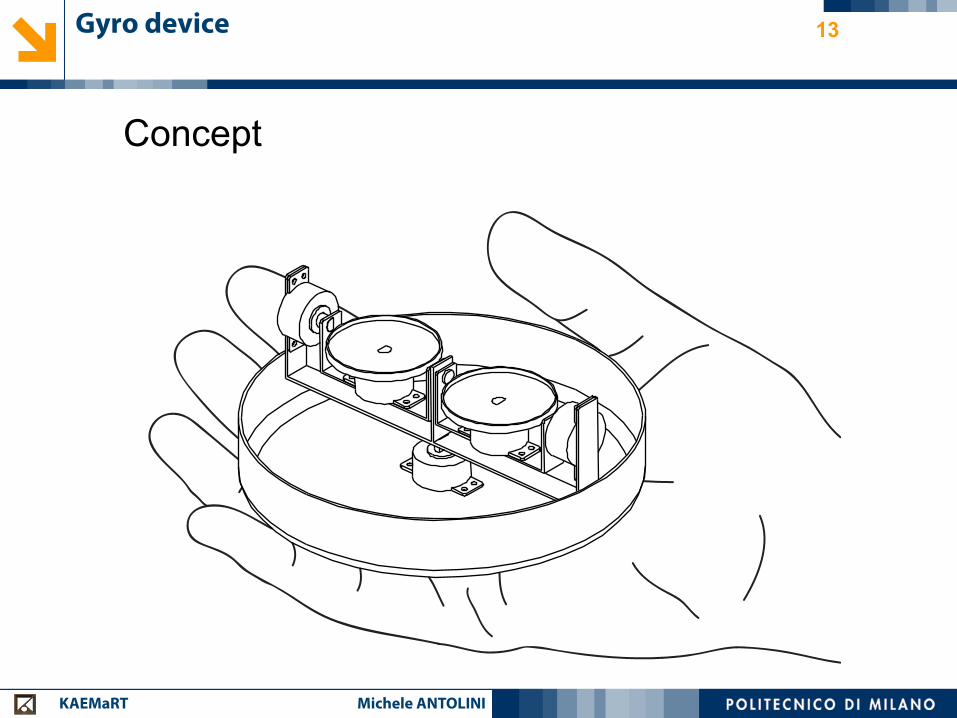
13 Gyro device
Concept
KAEMaRT Michele ANTOLINI
Gyro device
Configurazione side-by-side
KAEMaRT Michele ANTOLINI
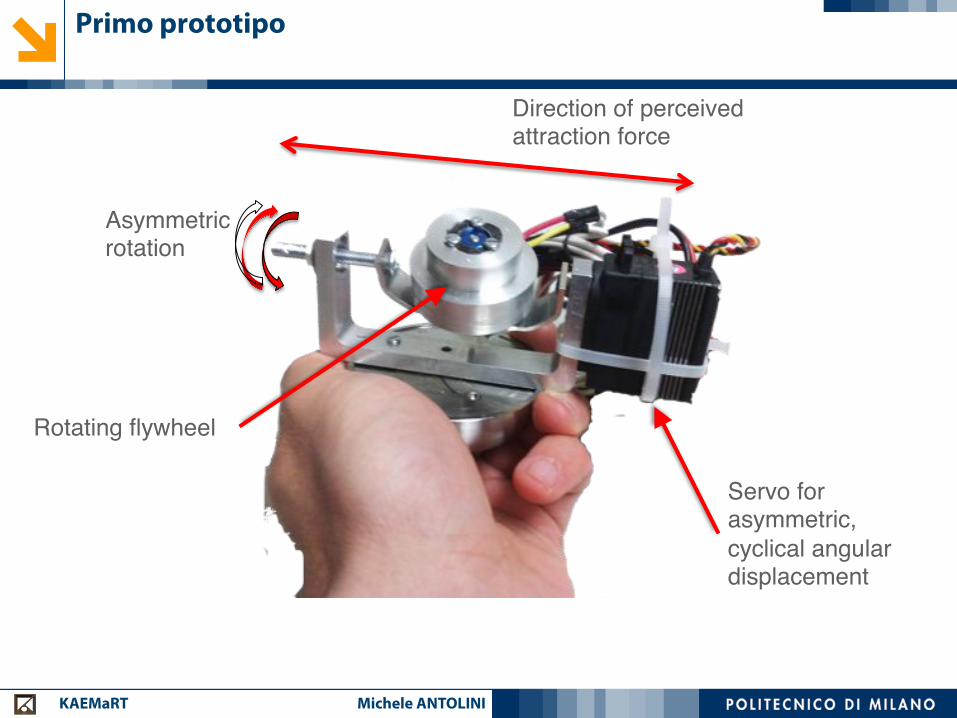
Direction of perceived attraction force"
Rotating flywheel"
Servo for asymmetric, cyclical angular displacement"
Asymmetric rotation"
Primo prototipo
KAEMaRT Michele ANTOLINI 16
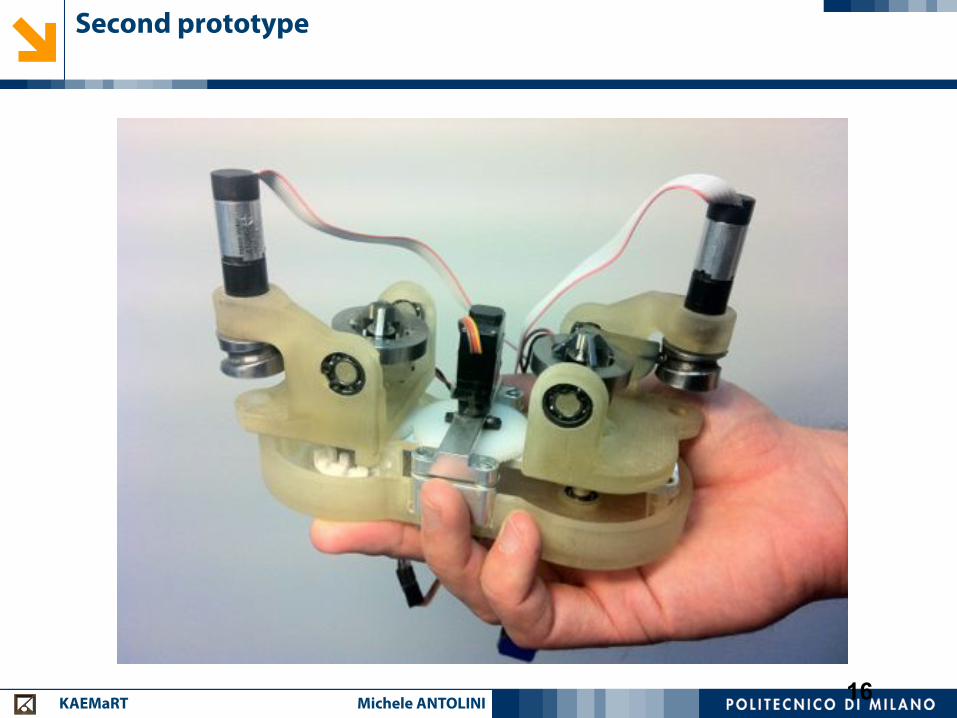
Second prototype
KAEMaRT Michele ANTOLINI
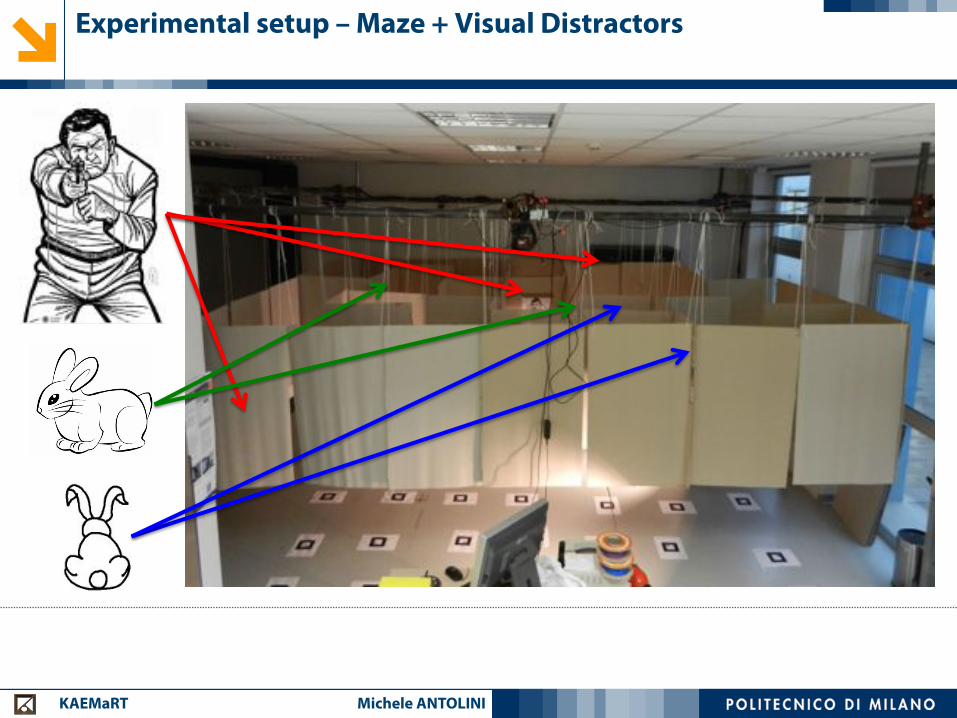
Experimental setup – Maze + Visual Distractors
KAEMaRT Michele ANTOLINI
Some pictures
KAEMaRT Michele ANTOLINI
Informatica Gra!ca
Argomenti del corso Prima parte: ripasso di geometria analitica (3D) • Vettori • Matrici di trasformazione delle coordinate • Rappresentazione linee e piani in due e tre dimensioni • Curve e super!ci • Geometria proiettiva e visualizzazione
KAEMaRT Michele ANTOLINI
Informatica Gra!ca
Argomenti del corso Seconda parte: OpenGL • Hardware 3D • Struttura delle librerie OpenGL • Visualizzazione linee, poligoni, curve e super!ci • Quadriche e evaluators, NURBS • Interattività, pick di oggetti 3D
KAEMaRT Michele ANTOLINI
Informatica Gra!ca
Argomenti del corso Argomenti avanzati • Ottimizzazione utilizzando Display List • Colori e illuminazione • Blending, antialiasing, fog • Texture • Shaders (GLSL: OpenGL Shading Language)
KAEMaRT Michele ANTOLINI
Informatica Gra!ca - Valutazione
• Esercitazioni di laboratorio: 0-3 punti. Alla !ne dei laboratori dovrete consegnare l’esercizio richiesto. Al termine del corso verranno valutati globalmente.
• Sviluppo di un progetto in cui l’interfaccia OpenGL sia coinvolta in maniera rilevante e in cui vengano utilizzate le conoscenze teoriche mostrate a lezione
• Redazione di un breve elaborato (15-20 pagine) che descriva le fasi del progetti progettazione e sviluppo, commentandone i risultati !nali
• Presentazione e dimostrazione delle funzionalità in sede d’esame • Gruppi: 2-3 studenti
• Ben visti progetti multidisciplinari • Concordare sempre con il docente i dettagli del progetto
KAEMaRT Michele ANTOLINI
Informatica Gra!ca
Ricevimento • Venerdi
• Previo appuntamento
KAEMaRT Michele ANTOLINI
Informatica Gra!ca
Calendario • Venerdi 9.30-13.30 Le date dei laboratori verranno comunicate nei prossimi giorni (stesso giorno ed ora delle lezioni) Durante il mese di maggio sono previste 3 lezioni aggiuntive (12 ore)
KAEMaRT Michele ANTOLINI
Informatica Gra!ca
Materiale del corso Sul sito u#ciale predisposto da UniBG (codice corso 38001) http://www.unibg.it/struttura/struttura.asp?corso=38001 Iscrizione al sito: http://www.kaemart.it/infogra!ca/unibg Verrà utilizzato per comunicazioni via email e per la consegna dei progetti !nali. Codice d’iscrizione: chiedere al docente





























