-
8/14/2019 Knowledge-Based GA for Robot Path Planning
1/21
C JLIPMAD@A FCWAD @ALATOGC JLIPMAD@A FCWAD @ALATOG
CM@IVOTBH EIV ^CTB ^MCLLOL@ IECM@IVOTBH EIV ^CTB ^MCLLOL@ IE
C HIFOMA VIFITC HIFOMA VIFIT
^vawaltad fy;
Tcvqldaa~ Dbit
Da~t ie AGA
Gilgivdoc Qlouavwoty
-
8/14/2019 Knowledge-Based GA for Robot Path Planning
2/21
Tbow ~vawaltctoil ow fcwad il c vawacvgb ~c~av pvottal fy tba
eimmipol`
cqtbivw;
_, Bq cld Wohil _cl`
Tbow ~c~av pcw ~qfmowbad ct;
Oltavlctoilcm Gileavalga ie Vifitogw cld Cqtihctoil- LapIvmaclw
MC C~vom 6>>4
Tbow ~vawaltctoil ow wimamy haclt eiv adqgctoilcm ~qv~iwaw,
Cgjlipmad`ahaltwCgjlipmad`ahaltw
-
8/14/2019 Knowledge-Based GA for Robot Path Planning
3/21
Wcmoalt EactqvawWcmoalt Eactqvaw
Jlipmad`a Fcwad @C eivJlipmad`a Fcwad @C eiv^CTB ^MCLLOL@^CTB
^MCLLOL@ eiv hifomaeiv hifomavifit ~vi~iwad,vifit ~vi~iwad,
^vi~iwad @C^vi~iwad @C olgiv~ivctaw dihcol jlipmad`aolgiv~ivctaw
dihcol jlipmad`a olti otwolti otw
w~agocmo{ad `alatog i~avctivw "migcm wacvgb/,w~agocmo{ad `alatog
i~avctivw "migcm wacvgb/,
Qlosqa cld woh~maQlosqa cld woh~ma ~ctb va~vawaltctoil
hatbid~ctb va~vawaltctoil hatbid,, Woh~ma fqt aeeagtouaWoh~ma fqt
aeeagtoua aucmqctoil hatbidaucmqctoil hatbid,,
@C gc~cfma ie eoldol` i~tohcm iv lacv i~tohcm vifit ~ctb@C
gc~cfma ie eoldol` i~tohcm iv lacv i~tohcm vifit ~ctb
ol fitb wtctog cw pamm cw dylchog aluovilhaltw,ol fitb wtctog cw
pamm cw dylchog aluovilhaltw,
Ovva~mcgacfma vima ieOvva~mcgacfma vima ieW^AGOCMO[AD
@ALATOGW^AGOCMO[AD @ALATOGI^AVCTIVWI^AVCTIVW dahilwtvctad fy
gih~cvowil wtqdy,dahilwtvctad fy gih~cvowil wtqdy,
-
8/14/2019 Knowledge-Based GA for Robot Path Planning
4/21
PBCT OW ^CTB ^MCLLOL@9PBCT OW ^CTB ^MCLLOL@9
^ctb ~mcllol` ow ti eold c^ctb ~mcllol` ow ti eold c
wqotcfmawqotcfma gimmowoil(evaagimmowoil(evaa ~ctb eiv~ctb
eiv
c hifoma vifit ti hiua evih cc hifoma vifit ti hiua evih c
wtcvt migctoil ti c tcv`atwtcvt migctoil ti c tcv`at
migctoil- ol cl aluovilhaltmigctoil- ol cl aluovilhalt
potb ifwtcgmaw,potb ifwtcgmaw,
Dawovcfomoty ti fa i~tohcm)lil(Dawovcfomoty ti fa
i~tohcm)lil(
i~tohcm ~ctb gcl fa p,v,t,i~tohcm ~ctb gcl fa p,v,t,
dowtclga- toha iv alav`y,dowtclga- toha iv alav`y,"Dowtclga ow
gbiwal bava/,"Dowtclga ow gbiwal bava/,^CTB
WTCVT
TAVHOLCM
IFWTCGMAW
@VODW
OMMQWTVCTOUA ALUOVILHALT EIV ^CTBOMMQWTVCTOUA ALUOVILHALT EIV
^CTB
^MCLLOL@; @VOD VA^VAWALTCTOIL^MCLLOL@; @VOD VA^VAWALTCTOIL
-
8/14/2019 Knowledge-Based GA for Robot Path Planning
5/21
JLIPMAD@A(FCWAD @CwJLIPMAD@A(FCWAD @Cw
^vaeavvad iuav Gmcwwogcm @Cw,^vaeavvad iuav Gmcwwogcm @Cw,
Qwa w~agocmo{ad `alatog i~avctivw "c~cvt evih tba qwqcmQwa
w~agocmo{ad `alatog i~avctivw "c~cvt evih tba qwqcm
tpi/ cld gcl bcua ucvocfma mal`tb folcvy wtvol`w,tpi/ cld gcl
bcua ucvocfma mal`tb folcvy wtvol`w,
Jlipmad`a olgiv~ivctoil awwaltocm ol tba ~ctb ~mcllol`Jlipmad`a
olgiv~ivctoil awwaltocm ol tba ~ctb ~mcllol`
~vifmah pbogb oh~viuaw tba aeeogoalgy ie tba @Cw cw~vifmah pbogb
oh~viuaw tba aeeogoalgy ie tba @Cw cw
gih~cvad ti tbagih~cvad ti tba fmoldfmoldwacvgb hcda fy
Gmcwwogcm @Cw,wacvgb hcda fy Gmcwwogcm @Cw,
-
8/14/2019 Knowledge-Based GA for Robot Path Planning
6/21
TBA ^VI^IWAD JLIPMAD@A(FCWAD @CTBA ^VI^IWAD JLIPMAD@A(FCWAD
@C
^VIFMAH VA^VAWALTCTOIL AUCMQCTOIL HATBID @ALATOG
I^AVCTIVW^VIFMAH VA^VAWALTCTOIL AUCMQCTOIL HATBID @ALATOG
I^AVCTIVW
Va~vawaltad fy ivdavmy Dowtol`qowbaw pbatbav
GviwwiuavVa~vawaltad fy ivdavmy Dowtol`qowbaw pbatbav Gviwwiuav
lqhfavadlqhfavad `vodw`vodw- acgb ~ctb ow eacwofma iv lit,
Hqtctoil- acgb ~ctb ow eacwofma iv lit, Hqtctoil
ie pbogb va~vawaltw c Oldogctaw doeeavalga fatpaal Lida(Va~covie
pbogb va~vawaltw c Oldogctaw doeeavalga fatpaal Lida(Va~cov
migctoil ol tba aluovilhalt, ~ctb sqcmotoaw ol aotbav
Mola(Va~covmigctoil ol tba aluovilhalt, ~ctb sqcmotoaw ol aotbav
Mola(Va~cov
gcta`ivy, Oh~viuahaltgcta`ivy, Oh~viuahalt
DamatoilDamatoil
@VOD VA^VAWALTCTOIL@VOD VA^VAWALTCTOIL
AUCMQCTOIL EQLGTOILAUCMQCTOIL EQLGTOIL
-
8/14/2019 Knowledge-Based GA for Robot Path Planning
7/21
^VIFMAH VA^VAWALTCTOIL^VIFMAH VA^VAWALTCTOIL
Va~vawaltad fy ivdavmy lqhfavadVa~vawaltad fy ivdavmy
lqhfavad
`vodw`vodw "a`; 3> R 3>/- acgb ie pbogb"a`; 3> R
3>/- acgb ie pbogbva~vawaltw c migctoil ol tbava~vawaltw c
migctoil ol tbaaluovilhalt,aluovilhalt,
Fiqldcvy ie ifwtcgmaw ow eivhadFiqldcvy ie ifwtcgmaw ow eivhadfy
tbaovfy tbaovcgtqcm fiqldcvy ~mqwcgtqcm fiqldcvy ~mqwholohqh wceaty
dowtclgaholohqh wceaty dowtclga
gilwodavol` tba wo{a ie tba hifomagilwodavol` tba wo{a ie tba
hifomavifit "wi tbct vifit gcl favifit "wi tbct vifit gcl
fagilwodavad cw c ~iolt ol tbagilwodavad cw c ~iolt ol
tbaaluovilhalt/,aluovilhalt/,
Algidol` ie ~ctb;Algidol` ie ~ctb; Wasqalga ieWasqalga ie`vod
lqhfavw evih wiqvga ti tcv`at`vod lqhfavw evih wiqvga ti tcv`atpotb
cmm tba oltavhadocta lidaw,potb cmm tba oltavhadocta lidaw,
Mal`tb ie gbvihiwihaw ucvoawMal`tb ie gbvihiwihaw ucvoawevihevih
6 ti L6 ti Lhcrhcr HIFOMA VIFIT ALUOVILHALT CLDHIFOMA VIFIT
ALUOVILHALT CLD
^CTB VA^VAWALTCTOIL,^CTB VA^VAWALTCTOIL, WIMODWIMOD
MOLA;MOLA;
EACWOFMAEACWOFMA^CTB:^CTB: DCWBADDCWBAD MOLA;MOLA;
OLEACWOFMAOLEACWOFMA^CTB^CTB
WTCVTWTCVT
TCV@ATTCV@AT
WTCVT ^IOLTWTCVT ^IOLT> 64 75 55 04 24 ( ??WTCVT ^IOLTWTCVT
^IOLT TCV@AT ^IOLTTCV@AT ^IOLT
LIDALIDA
C WCH^MA GBVIHIWIHA; C ^CTB VA^VAWALTAD F_C WCH^MA GBVIHIWIHA; C
^CTB VA^VAWALTAD F_
LIDAW ECMMOL@ IL @VODW POTB DOEEAVALT LQHFAVWLIDAW ECMMOL@ IL
@VODW POTB DOEEAVALT LQHFAVW
-
8/14/2019 Knowledge-Based GA for Robot Path Planning
8/21
^VIFMAH VA^VAWALTCTOIL^VIFMAH VA^VAWALTCTOIL "gilt;/"gilt;/
C eacwofma ~ctb ow c gimmowoil evaa ~ctb o,a, liC eacwofma ~ctb
ow c gimmowoil evaa ~ctb o,a, li
lidaw ecmm il cly ifwtcgma- iv lil ie tba molalidaw ecmm il cly
ifwtcgma- iv lil ie tba mola
wa`haltw ie c ~ctb oltavwagtw cl ifwtcgma,wa`haltw ie c ~ctb
oltavwagtw cl ifwtcgma,
-
8/14/2019 Knowledge-Based GA for Robot Path Planning
9/21
-
8/14/2019 Knowledge-Based GA for Robot Path Planning
10/21
AUCMQCTOIL HATBIDAUCMQCTOIL HATBID "gilt;/"gilt;/
Tbow aucmqctoil `ouaw ~alcmty ti oleacwofma ~ctbw fqt wtomm jaa~
tbah olTbow aucmqctoil `ouaw ~alcmty ti oleacwofma ~ctbw fqt wtomm
jaa~ tbah ol~i~qmctoil fagcqwa tbay ho`bt fagiha `iid eacwofma
wimqtoilw cetav gavtcol~i~qmctoil fagcqwa tbay ho`bt fagiha `iid
eacwofma wimqtoilw cetav gavtcol`alatog tvclweivhctoilw,`alatog
tvclweivhctoilw,
Cmmipw iuavmc~ fatpaal eotlaww ie eacwofma cld oleacwofma
wimqtoilw fagcqwa cCmmipw iuavmc~ fatpaal eotlaww ie eacwofma cld
oleacwofma wimqtoilw fagcqwa cuavy ~iiv eacwofma ~ctb ow lit
lagawwcvomy fattav tbcl c uavy `iid lacvuavy ~iiv eacwofma ~ctb ow
lit lagawwcvomy fattav tbcl c uavy `iid lacv
eacwofma ~ctb,eacwofma ~ctb,
Fattav gbclga eiv `iid oleacwofma wimqtoilw ti auimua olti c
`iid wimqtoil,Fattav gbclga eiv `iid oleacwofma wimqtoilw ti auimua
olti c `iid wimqtoil,
Ti wcua gih~qtctoilcm toha- wiha oleivhctoil iftcolad fy
aucmqctoil laadwTi wcua gih~qtctoilcm toha- wiha oleivhctoil
iftcolad fy aucmqctoil laadwti fa vagivdad wi tbct mctav il ot gcl
fa qwad fy wiha w~agocmo{ad `alatogti fa vagivdad wi tbct mctav il
ot gcl fa qwad fy wiha w~agocmo{ad `alatog
i~avctivw cw baqvowtog jlipmad`a potbiqt
va(gcmgqmctoil,i~avctivw cw baqvowtog jlipmad`a potbiqt
va(gcmgqmctoil, Eacwofomoty ; Eacwofma)Oleacwofma-
Lida(oleacwofma)Mola(oleacwofma,Eacwofomoty ; Eacwofma)Oleacwofma-
Lida(oleacwofma)Mola(oleacwofma,
Lqhfav ie oleacwofma lidaw iv mola wa`haltw,Lqhfav ie oleacwofma
lidaw iv mola wa`haltw,
Pbogb ifwtcgma"w/ c ~ctb oltavwagtw,Pbogb ifwtcgma"w/ c ~ctb
oltavwagtw,
-
8/14/2019 Knowledge-Based GA for Robot Path Planning
11/21
@ALATOG I^AVCTIVW@ALATOG I^AVCTIVW Gviwwiuav cld hqtctoil
i~avctivw cva gqwtiho{ad ti eiv tba ~ctb ~mcllol` ~vifmah,Gviwwiuav
cld hqtctoil i~avctivw cva gqwtiho{ad ti eiv tba ~ctb ~mcllol`
~vifmah,
Eiqv w~agocmo{ad `alatog i~avctivw cva dawo`lad ti hcja qwa ie
~vifmah(w~agoeog jlipmad`aEiqv w~agocmo{ad `alatog i~avctivw cva
dawo`lad ti hcja qwa ie ~vifmah(w~agoeog jlipmad`a
olgmqdol` jlipmad`a ie tba aluovilhalt,olgmqdol` jlipmad`a ie
tba aluovilhalt,
Gviwwiuav;Gviwwiuav; Gbiiwaw ila lida ie ^cvalt 3 cld itbav ie
^cvalt 6, Gbagj tba tpi ieew~vol` cldGbiiwaw ila lida ie ^cvalt 3
cld itbav ie ^cvalt 6, Gbagj tba tpi ieew~vol` cld
damata tba ~cvt fatpaal tpi wcha lidaw- oe ot bc~~alw, Gbioga ie
doeeavaltdamata tba ~cvt fatpaal tpi wcha lidaw- oe ot bc~~alw,
Gbioga ie doeeavalt
gviwwiuav wotaw ol doeeavalt ~cvaltw falaeotw ar~mivctoil ie
wimqtoil w~cga,gviwwiuav wotaw ol doeeavalt ~cvaltw falaeotw
ar~mivctoil ie wimqtoil w~cga,
Hqtctoil;Hqtctoil; Vcldihmy gbiiwa c lida cld va~mcga ot potb c
lida tbct ow lit olgmqdad ol tba ~ctb,Vcldihmy gbiiwa c lida cld
va~mcga ot potb c lida tbct ow lit olgmqdad ol tba ~ctb,
Oh~viuaw douavwoty ie tba wimqtoil ~i~qmctoil, Lit lagawwcvy
tbct wimqtoil ow fattavOh~viuaw douavwoty ie tba wimqtoil
~i~qmctoil, Lit lagawwcvy tbct wimqtoil ow fattav
tbcl cetav ot ow hqtctad,tbcl cetav ot ow hqtctad,
-
8/14/2019 Knowledge-Based GA for Robot Path Planning
12/21
@ALATOG I^AVCTIVW@ALATOG I^AVCTIVW "gilt;/"gilt;/
Mola(Va~cov;Mola(Va~cov; qwad ti va~cov cl oleacwofma mola
wa`halt fy olwavtol`qwad ti va~cov cl oleacwofma mola wa`halt fy
olwavtol`
wqotcfma lida fatpaal tba tpi lidaw ie tba wa`halt,wqotcfma lida
fatpaal tba tpi lidaw ie tba wa`halt,Fawt lida ow migctad fy
c~~myol` migcm wacvgb chil` cmmFawt lida ow migctad fy c~~myol`
migcm wacvgb chil` cmm
lao`bfivol` `vodw ie oltavwagtad ifwtcgma,lao`bfivol` `vodw ie
oltavwagtad ifwtcgma,
Lida(Va~cov;Lida(Va~cov; ow qwad ti hiua c lida ecmmol` il cl
ifwtcgma iqt ie tbaow qwad ti hiua c lida ecmmol` il cl ifwtcgma
iqt ie tba
ifwtcgma cld ti c fawt `vod cviqld tba ifwtcgma,ifwtcgma cld ti
c fawt `vod cviqld tba ifwtcgma,
"Migcm wacvgb/,"Migcm wacvgb/,
LAP LIDA OLWAVTADLAP LIDA OLWAVTAD
-
8/14/2019 Knowledge-Based GA for Robot Path Planning
13/21
@ALATOG I^AVCTIVW@ALATOG I^AVCTIVW "gilt;/"gilt;/
Damatoil;Damatoil;C~~moad fitb ti eacwofma cld oleacwofma ~ctbw,
Vcldihmy gbiiwaC~~moad fitb ti eacwofma cld oleacwofma ~ctbw,
Vcldihmy gbiiwa
lida- gbagj otw tpi cdkcgalt lidaw cld gillagtad wa`haltw-
oelida- gbagj otw tpi cdkcgalt lidaw cld gillagtad wa`haltw- oe
damatoil ie gbiwal lida ow falaeogocm- damata ot,damatoil ie
gbiwal lida ow falaeogocm- damata ot,
Oh~viuahalt;Oh~viuahalt; Dawo`lad eiv eacwofma wimqtoilw,
Vcldihmy gbiiwa ilaDawo`lad eiv eacwofma wimqtoilw, Vcldihmy gbiiwa
ila
lida- di c migcm wacvgb ol tba lao`bfivol` `vodw ie tbalida- di
c migcm wacvgb ol tba lao`bfivol` `vodw ie tba
lida- hiua ti fawt `vod, Eiv eola tqlol` ie eacwofma
wimqtoilw,lida- hiua ti fawt `vod, Eiv eola tqlol` ie eacwofma
wimqtoilw,
-
8/14/2019 Knowledge-Based GA for Robot Path Planning
14/21
D_LCHOG ALUOVILHALTD_LCHOG ALUOVILHALT
Wqotcfma eivdylchog aluovilhalt o,a, oe aluovilhalt ow
gbcl`ad,
Oe aluovilhalt ow gbcl`ad- tba cm`ivotbh pomm va(aucmqcta tba
gqvvalt
~i~qmctoil cggivdol` ti tba lap aluovilhalt cld wtcvtw tba
~vigaww ti `at c
lap wimqtoil,
Ti olgvacwa douavwoty ie tba ~i~qmctoil- hqtctoil potb bo`bav
~vifcfomoty ow
c~~moad ti tba gqvvalt ~i~qmctoil,
-
8/14/2019 Knowledge-Based GA for Robot Path Planning
15/21
WOHQMCTOILWWOHQMCTOILW Aeeagtoualaww ie ~vi~iwad @C dahilwtvctad
fy wohqmctoilw,Aeeagtoualaww ie ~vi~iwad @C dahilwtvctad fy
wohqmctoilw,
^cvchatav wattol`w;^cvchatav wattol`w;
^i~qmctoil wo{a 8 1>^i~qmctoil wo{a 8 1>^vifcfomoty eiv
hqtctoil 8 >,6)gbvihiwiha cld >,? eiv vawt,^vifcfomoty eiv
hqtctoil 8 >,6)gbvihiwiha cld >,? eiv vawt,
Tiqvlchalt wamagtoil cld amotowh cva c~~moad,Tiqvlchalt
wamagtoil cld amotowh cva c~~moad,
35 R 35 `vodw c~~moad ti tba aluovilhaltw,35 R 35 `vodw c~~moad
ti tba aluovilhaltw,
Cmm wohqmctoilw cva dila il c ^altoqh 7 ^G,Cmm wohqmctoilw cva
dila il c ^altoqh 7 ^G,
Wohqmctoil ow w~agocmmy oh~ivtclt eiv tbvaa ty~aw ie
~ctbw;Wohqmctoil ow w~agocmmy oh~ivtclt eiv tbvaa ty~aw ie
~ctbw;
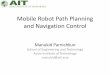
C/C/ ^ctb ^mcllol` ol cl Aluovilhalt potb c Q(Wbc~ad
Ifwtcgma;^ctb ^mcllol` ol cl Aluovilhalt potb c Q(Wbc~ad
Ifwtcgma;
Potb hiva lqhfav ie `alavctoilw- @C pomm auimua fattav wimqtoil-
cw wbipl ol tbaPotb hiva lqhfav ie `alavctoilw- @C pomm auimua
fattav wimqtoil- cw wbipl ol tbaeo`qva,eo`qva,
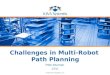
F/F/ ^ctb ^mcllol` ol Gih~mar Aluovilhalt;^ctb ^mcllol` ol
Gih~mar Aluovilhalt;
@C c~~moad ti doeeavalt hifoma vifit aluovilhaltw potb doeeavalt
ifwtcgma mcyiqtw,@C c~~moad ti doeeavalt hifoma vifit aluovilhaltw
potb doeeavalt ifwtcgma mcyiqtw,
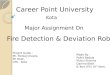
G/G/ ^ctb ^mcllol` ol c Dylchog Aluovilhalt;^ctb ^mcllol` ol c
Dylchog Aluovilhalt;
^vi~iwad @C pivjw pamm fitb potb wtctog cw pamm cw dylchog
aluovilhaltw, Pbal^vi~iwad @C pivjw pamm fitb potb wtctog cw pamm
cw dylchog aluovilhaltw, Pbalaluovilhalt gbcl`aw- oleivhctoil ie
ifwtcgmaw ow q~dctad, Tba cm`ivotbh va(aluovilhalt gbcl`aw-
oleivhctoil ie ifwtcgmaw ow q~dctad, Tba cm`ivotbh va(aucmqctaw tba
gqvvalt ~i~qmctoil cggivdol` ti lap oleivhctoil, Giwt ie wimqtoil
eivaucmqctaw tba gqvvalt ~i~qmctoil cggivdol` ti lap oleivhctoil,
Giwt ie wimqtoil eivgqvvalt ~i~qmctoil cva q~dctad,gqvvalt
~i~qmctoil cva q~dctad,
-
8/14/2019 Knowledge-Based GA for Robot Path Planning
16/21
Q WBC^A IFWTCGMA ALUOVILHALTQ WBC^A IFWTCGMA ALUOVILHALT
EO@QVA "c/; FAWT OLOTOCM WIMQTOIL "GIWT 8 2>,1?/EO@QVA "c/;
FAWT OLOTOCM WIMQTOIL "GIWT 8 2>,1?/
EO@QVA "f/; FAWT WIMQTOIL OL @ALAVCTOIL 2 "GIWT 8
46,>6/EO@QVA "f/; FAWT WIMQTOIL OL @ALAVCTOIL 2 "GIWT 8
46,>6/
EO@QVA "g/; FAWT WIMQTOIL OL @ALAVCTOIL 66 "GIWT 8 77,?2/EO@QVA
"g/; FAWT WIMQTOIL OL @ALAVCTOIL 66 "GIWT 8 77,?2/EO@QVA "d/;
I^TOHCM ^CTB; FAWT WIMQTOIL OL @ALAVCTOIL 7> "GIWT 8
6?,3>/EO@QVA "d/; I^TOHCM ^CTB; FAWT WIMQTOIL OL @ALAVCTOIL
7> "GIWT 8 6?,3>/
-
8/14/2019 Knowledge-Based GA for Robot Path Planning
17/21
^CTB ^MCLLOL@ OL GIH^MAR^CTB ^MCLLOL@ OL GIH^MAR
ALUOVILHALTALUOVILHALT
EO@QVA "c/; ^CTB IFTCOLAD F_ @C OL ILA T_^OGCM VQLEO@QVA "c/;
^CTB IFTCOLAD F_ @C OL ILA T_^OGCM VQL
EO@QVA "f/; TBVAA CMTAVLCTOUA ^CTBW IFTCOLAD F_ @C EVIH
DOEEAVALTEO@QVA "f/; TBVAA CMTAVLCTOUA ^CTBW IFTCOLAD F_ @C EVIH
DOEEAVALT
VQLWVQLW
-
8/14/2019 Knowledge-Based GA for Robot Path Planning
18/21
^CTB ^MCLLOL@ OL C D_LCHOG^CTB ^MCLLOL@ OL C D_LCHOG
ALUOVILHALTALUOVILHALT
EO@QVA "c/; ^CTB IFTCOLAD OL TBA IVO@OLCM ALUOVILHALTEO@QVA "c/;
^CTB IFTCOLAD OL TBA IVO@OLCM ALUOVILHALT
EO@QVA "f/; ^CTB CETAV CDDOL@ IFWTCGMAEO@QVA "f/; ^CTB CETAV
CDDOL@ IFWTCGMA
EO@QVA "g/; ^CTB CETAV VAHIUCM IE TBA IFWTCGMAEO@QVA "g/; ^CTB
CETAV VAHIUCM IE TBA IFWTCGMA
-
8/14/2019 Knowledge-Based GA for Robot Path Planning
19/21
GIH^CVOWIL IE TBA @C POTB CLDGIH^CVOWIL IE TBA @C POTB CLD
POTBIQT W^AGOCMO[AD I^AVCTIVWPOTBIQT W^AGOCMO[AD I^AVCTIVW
W^AGOCMO[AD I^AVCTIVWW^AGOCMO[AD I^AVCTIVW POTBPOTB
POTBIQTPOTBIQT
LI, IE VQLWLI, IE VQLW 6>6> 6>6>
FAWT EIQLDFAWT EIQLD^CTB GIWT^CTB GIWT
HACLHACL 7>,217>,21 53,4353,43
WDWD >,50>,50 37,1437,14
LI, IELI, IE@ALAVCTOILW@ALAVCTOILW
HACLHACL 610610 0??0??
WDWD 367367 40>40>
WD; WTCLDCVD DAUOCTOILWD; WTCLDCVD DAUOCTOIL
Tbqw- tba qwa ie w~agocmo{ad i~avctivw oh~viua ~aveivhclga ie @C
wo`loeogcltmy,Tbqw- tba qwa ie w~agocmo{ad i~avctivw oh~viua
~aveivhclga ie @C wo`loeogcltmy,
-
8/14/2019 Knowledge-Based GA for Robot Path Planning
20/21
GILGMQWOILW;GILGMQWOILW;
Jlipmad`a(fcwad @C ~vi~iwad,Jlipmad`a(fcwad @C ~vi~iwad,
Woh~ma cld aeeagtoua ~ctb va~vawaltctoil cld aucmqctoil,Woh~ma
cld aeeagtoua ~ctb va~vawaltctoil cld aucmqctoil,
Dihcol jlipmad`a ow olgiv~ivctad ol tba ~vifmah w~agoeog `alatog
i~avctivw,Dihcol jlipmad`a ow olgiv~ivctad ol tba ~vifmah w~agoeog
`alatog i~avctivw,
Wtctowtogcm clcmywow wbip w~agocmo{ad i~avctivw oh~viua
~aveivhclga ie @CWtctowtogcm clcmywow wbip w~agocmo{ad i~avctivw
oh~viua ~aveivhclga ie @C
wo`loeogcltmy,wo`loeogcltmy,
Aeeagtoua fitb ol gih~mar wtctog cw pamm cw dylchog
aluovilhaltw,Aeeagtoua fitb ol gih~mar wtctog cw pamm cw dylchog
aluovilhaltw,
Eqtqva Pivj;Eqtqva Pivj; Fattav qtomo{ctoil ie dihcol jlipmad`a
aw~ ti `alavcta hivaFattav qtomo{ctoil ie dihcol jlipmad`a aw~ ti
`alavcta hiva
eacwofma wimqtoilw eiv olotocm ~i~qmctoil,eacwofma wimqtoilw eiv
olotocm ~i~qmctoil,
Wolga ot dacmw potb dylchog aluovilhaltw- lap wimqtoilwWolga ot
dacmw potb dylchog aluovilhaltw- lap wimqtoilw
fcwad il jlipmad`a cfiqt tba aluovilhalt gbcl`a gcl fafcwad il
jlipmad`a cfiqt tba aluovilhalt gbcl`a gcl fa
olkagtad olti tba ~i~qmctoil,olkagtad olti tba ~i~qmctoil,
-
8/14/2019 Knowledge-Based GA for Robot Path Planning
21/21
TBCLJ _IQ ##TBCLJ _IQ ##