Embed Size (px)
Citation preview

Kobe University Repository : Thesis
学位論文題目Tit le 画像流体計測における時空間・多次元解析に関する研究
氏名Author 桐本, 兼輔
専攻分野Degree 博士(工学)
学位授与の日付Date of Degree 2010-03-25
資源タイプResource Type Thesis or Dissertat ion / 学位論文
報告番号Report Number 甲4950
権利Rights
JaLCDOI
URL http://www.lib.kobe-u.ac.jp/handle_kernel/D1004950※当コンテンツは神戸大学の学術成果です。無断複製・不正使用等を禁じます。著作権法で認められている範囲内で、適切にご利用ください。
PDF issue: 2021-05-18

博 士 論 文
画像流体計測における
時空間・多次元解析に関する研究
平成 22 年 1 月
神戸大学大学院海事科学研究科
桐 本 兼 輔

i
目 次
1.緒論‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥1
1.1 研究背景‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥1
1.2 本研究の取り組み‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥3
2.相関情報の時空間解析‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥7
2.1 計測原理 ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥7
2.1.1 P I V の基本原理‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 7
2.1.2 相互相関法‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥11
2.1.3 時空間微分法‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥13
2.2 時空間解析に基づく流場の多次元解析‥‥‥‥‥‥‥‥‥‥‥‥‥15
2.2.1 時空間相関情報‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥15
2.2.2 高次解析手法‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥18
2.3 結言‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥21
3.PIV高次解析手法の開発‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥23
3.1 積分型解析手法‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥23
3.1.1 計測原理‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥23
3.1.2 積分型アルゴリズム‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥26
3.2.微分型解析手法‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥32
3.2.1 計測原理‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥32
3.2.2 微分型アルゴリズム‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥34
3.3 高次解析手法の性能評価‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥36
3.3.1 流場の高次解析に基づく新手法の有用性の検証‥‥‥‥‥36
3.3.2 人工画像を用いた精度評価‥‥‥‥‥‥‥‥‥‥‥‥‥‥38
3.4 結言‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥42
4.高精度サブピクセル解析手法の開発‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥43
4.1 高次展開型時空間微分法‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥43

ii
4.1.1 計測原理‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥43
4.1.2 高次展開アルゴリズム‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥46
4.2 高精度手法の性能評価‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥52
4.2.1 従来型手法に対する性能向上‥‥‥‥‥‥‥‥‥‥‥‥‥52
4.2.2 高精度化の要素分析‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥55
4.3 結言‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥58
5.誤差分析に基づく総合的性能評価‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥59
5.1 アルゴリズムの基本性能‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥60
5.1.1 ピクセル解析の残差特性‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥60
5.1.2 サブピクセル解析の誤差特性‥‥‥‥‥‥‥‥‥‥‥‥‥65
5.2 アルゴリズムの総合性能‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥69
5.2.1 誤差伝播メカニズムの分析‥‥‥‥‥‥‥‥‥‥‥‥‥‥69
5.2.2 誤差伝播モデル‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥73
5.2.3 誤差モデルに基づく性能分析‥‥‥‥‥‥‥‥‥‥‥‥‥81
5.3 結言‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥90
6.結論‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥91
謝辞‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥93
参考文献‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥94
公表論文‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥97
付録‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥99
付録 A‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥99
付録 B‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥101

- 1 -
第1章 緒 論
1.1 研究背景
流れの可視化は,Reynolds[1]や Prandtl[2],Karman[3]の行なった実験に代表され
るように,古くから流体力学における未知現象の解明に大きく貢献してきた[4].可視
化の方法には,対象とする流場や解析の目的に応じて,現在までに種々多様な手法が考
案されている.これらの手法のうち,トレーサ法と呼ばれる手法は科学技術の進歩と相
まって,流れの定量化に結びつくこととなった.
トレーサ法は,流体中に目印となるトレーサを懸濁し,流体運動を可視化する手法
である.これは,写真を用いた流跡線の観察などに用いられてきたが,Nayler らはト
レーサの移動を手作業で検出し,速度分布の抽出を試みた[5].文献によると,これが
最も古い定量化の例として挙げられており[6],可視化に基づく定量化システムの開発
に関する研究はその後も継続的に行なわれた[7].そして,レーザー発振に成功したこ
とや,CCDカメラが市販化され[8][9],計算機上で画像を取り扱うことが容易になった
こと,さらに,計測アルゴリズムの開発によって速度場の自動抽出が可能になったこと
により[10],粒子画像流速測定法(Particle Image Velocimetry: PIV)と呼ばれる計測シ
ステムの原型が成立した.
PIV では,流体中にトレーサ粒子を懸濁し,レーザーシート光を照射することによ
り,ある面内の流れを可視化している.照射範囲内の粒子から得られる反射光は CCDカ
メラで撮影され,流体に追随するトレーサの運動はデジタル画像に記録される.ある時
間間隔を持って撮影される粒子画像に対して画像処理を施すと,対象領域内の速度分布
を求めることができる.
PIV以前の計測手法は,ピトー管[11]や熱線流速計[12]のように,流場のある一点で
の速度を計測するものであった.このため,空間的な流場の変化を求めるには長時間の
計測と手間がかかり,空間的な速度の分布特性が問題となるような流場の解析は簡単で
はなかった.これに対し,PIV は速度場を「面」として捉えることが可能であるため,
従来に比べて計測効率を飛躍的に向上することに成功した.しかし,PIV開発初期に用
いられいた画像は,ハードウェア性能の制約から 256×256pixel,30fps(frame per
second)程度のものであり,PIV のシステム性能は限定的なものであった.PIV を適用

- 2 -
可能な流場は 2次元性の強いものに限定されていたし,計測値の信頼性や分解能につい
ても実用上十分な性能を有していたわけではない.これらの問題に対し,現在までに計
測技術・画像解析技術の両面で研究開発が行われ,PIVの性能向上が図られた.
計測技術の面では,レーザーの高出力化やカメラの撮影速度・空間解像度の向上が
図られ,現在では 1024×1024pixel,1000fps程度の画像を PIVに用いることも一般的
になった.これに伴い,2台のカメラで可視化画像を撮影し,計測対象面内の速度 3成
分を計測するステレオ PIV[13][14]の技術が確立され,3 次元性の強い流場においても
PIVを適用可能になった.さらに,5000fpsを超える周波数で画像取得を行な
うことにより,高速気流の解析や相対的に流れが高速になるマイクロ流に対しても PIV
を適用可能になるなど[15][16],PIV の応用範囲は大きく拡がった.他にも,流場の変
動スケールを大きく上回る周波数で PIV 解析が可能なダイナミック PIV[17][18]は,
PIVによる流場の周波数解析も可能にし,流体現象をより詳細に解析することが可能に
なった.
他方,画像解析技術の面でも様々な研究開発が行われ,PIV の実用化に貢献してき
た[19].高速アルゴリズムの開発は処理の効率化をもたらしたし,分布パターン対応付
けの不具合によって生じる過大な誤ベクトルへの対処法も確立され,計測システムの安
定性も向上した.また,取得画像の質が向上した結果,小数点画素以下の画像移動量を
検出することも考えられるようになった.これは,サブピクセル解析と呼ばれ,現在の
PIV では標準的にシステムに組入れられている.これにより,現在の PIV アルゴリズ
ムは実用上十分な精度を獲得するに至った.
現在のように高度に発達した PIVにおいて,現状での課題や次世代の PIVに求めら
れる要件を挙げるとすれば,計測対象の多次元化と,解析の高次化の 2つが挙げられる.
これらのうち計測対象の多次元化においては,計測領域ならびに計測対象量の 3次元化
が当面の課題である.本来,PIV が計測対象とする流場は時空間に分布する非定常 3
次元流場である.これを画像で切り出し,計測を行なうわけであるが,もともとの 3次
元流場を求めるためには何らかの工夫が必要になる.例えば,ステレオ PIV の技術を
応用して多断層画像撮影を行なうスキャニング・ステレオ PIV は,完全な同時計測で
はないものの計測領域の 3次元化に成功し,3次元渦構造の解析なども可能にした[20].
他にも,X 線断層写真の再構成技術を応用して 3 次元画像情報の取得を行なう手法や,
- 3 -
ホログラフィを利用して 3 次元情報の取得を試みる手法などが提案されている[21][22].
今後,実用的な 3次元計測技術が開発されれば,PIVの応用範囲や計測の可能性は飛躍
的に拡大し,PIVの歴史において最も大きい発展が得られるものと期待される.
一方,解析の高次化は速度場の力学的解析に必要な速度勾配あるいは 2 回以上の微
分情報の解析の問題である.PIVは,面計測を可能にした画期的な計測手法であったが,
計測結果の応用は,速度場の観察以上にはなかなか進まず,力学的解析に結び付けられ
た例は多くない.これは,現在の PIV 解析手法が微分解析に必要な精度を有していな
いことが主要因であると考えられる.現在の PIV は精度・安定性の両面において開発
初期とは比較にならないほどの性能を持ち[23][24][25],これらは PIVの実用化に大き
く貢献している.しかし,現在の PIV においても,その計測対象物理量は速度を対象
とするのみに留まっており,この点については未だに発展の余地が残されている.PIV
の計測目的は,流場の速度分布を求めることであるが,速度分布を求める真の目的は流
体運動の解析である.流体運動の支配方程式である Navier-Stokes方程式は,速度の 1・
2階微分を用いた微分方程式で記述されている.したがって,これらの速度の微分値を
対象として PIV 解析を行うことができれば,流体運動を力学的な因果関係に基づいて
解析することも可能になる.このような手法は現在でも確立されていないため,流場の
高次解析手法の開発も,計測領域の 3 次元化と同様次世代の PIV に求められる要件の
一つとなっている.
また,速度勾配や,その曲率のような物理量を解析対象とする場合,これらはオー
ダーの違いから極めて小さい値を取ることになる.現在用いられている PIV 解析手法
は,速度の計測に対しては十分な精度を確保できているが,高次解析への展開を考える
場合には,現在よりもさらに高精度の解析手法も必要になるものと考えられる.
1.2 本研究の取り組み
前節では PIVの開発と発展の経緯について述べるとともに,次世代の PIVに必要と
される手法の要件を示した.本論文では,これらの要件のうち解析の高次化に対して焦
点を当てて,PIV高次解析手法の提案と具体的手法開発を行った.
PIV の計測対象は可視化された領域の速度場であるが,現在用いられている PIV で
は,微小領域で計測された速度の集合として速度場を求めている.しかし,可視化画像

- 4 -
の背後に存在する物理現象を踏まえて考えると,可視化領域内の速度場は,時空間領域
で連続的に変化する.このような観点に立つと,従来のような「点」の集合として速度
場を求めるのではなく,「場」を解析対象として速度場を曲面で取り出すような解析方
法も考えられるようになり,PIV の新たな可能性が拓かれる.速度を「場」として直接
得ることができれば,速度分布だけでなくその勾配や曲率といった高次の物理量も一度
に得ることができる.これらの高次項は,流体運動の基礎方程式を構成する要素である
ので,力学的因果関係に基づいた流場解析へと発展する可能性も考えられる.本論文は,
このような見地から,速度の解析に留まらない画像流体解析法の開発を試みたものであ
る.
本論文は,全 6 章で構成されるが,1 章および 2 章において PIV 開発の経緯を概観
した後,本来 PIV 計測が目指す時空間領域における速度計測の意義と目的の再考を行っ
た.この結果,計測の目的が力学的なメカニズムの解明にあるとするならば,高次情報
を含む時空間・多次元解析が必要であるとの結論に達した.これを受けて 3章および 4
章において,新しい計測概念に基づいた具体的なアルゴリズムの提案とその性能検証を
行った.これらの新しいアルゴリズム導入による計測精度の向上について,その内容を
慎重に検討した結果,複数のサブシステムから構成される PIV 解析システム内での誤差
の発生と伝播の特性を一元的に整理できることが分かった.これを受けて 5章では,解
析システム内での誤差伝播をモデル化し,性能改善のメカニズムと要点をまとめること
ができた.また 6章では,論文の総括を行った.以下に,各小毎に論文内容を概説する.
第 2 章では,本論文の中核を担う新しい計測の概念について論述した.2.1 節では,
PIV の基本原理について説明するとともに,代表的な PIV 計測アルゴリズムの例を示し
ている.また,2.2 節においては,時空間相関情報の概念を導入した上で速度を時空間
に存在する「場」と捉えて解析対象とすることにより,次世代の PIV 解析法に対する新
しい概念の提案を行なった.さらに,この概念に基づいた新しい計測手法の開発に対す
る方針についても合わせて述べた.
第 3 章では,相関情報の時空間解析を行うための具体的手法開発を行った内容につ
いて述べた.開発した手法は,積分型と微分型の 2 つの手法に大別される.ここで積分
型手法とは,時空間領域での相関係数の線積分を流場の評価指標とし,「場」の解析を
試みるものである.また微分型手法とは,従来用いられてきた相関法が 2枚の分布の位

- 5 -
置を微分していることに着目し,これを時空間で隣り合う相関分布同士に繰り返し適用
することにより,帰納的に高次の流場解析を行う手法である.さらに開発された手法に
ついて,VSJ 標準画像(Visualization Society of Japan: VSJ)を用いて性能評価を行った.こ
の結果,積分型手法が速度の一階微分を計測可能であり,速度の実質微分まで解析対象
物理量を拡大できることを示した.
第 4 章では,従来の高精度手法として知られる時空間微分法の計測原理を高次に展
開し,画像の高次微分項を速度の評価に取り入れることによって,更なる高精度手法の
開発を試みた.これにより,流場の評価対象には速度とその時空間勾配が含まれるよう
になり,多次元解析が必要になった.さらに,支配方程式の高次項には速度に対する非
線形項が現れ,数値反復解法の適用が必要になるが,ここでは,これらの要件に対応し
た解析アルゴリズムを開発した.開発した手法については,第 3 章と同様に VSJ 標準
画像を用いて精度評価を行い,高次項が時空間微分法の基本性能向上に寄与することを
確かめた.
第 5 章では,ピクセル・サブピクセル解析の誤差特性をそれぞれ分析し,これらの
複合的な解析メカニズムを明らかにした.PIV 解析はピクセル単位の画像解析を行うサ
ブシステムとサブピクセル精度を解析するサブシステムから構成される.これらは,個
別の誤差特性を有しているが,サブシステム間での誤差の伝播を吟味し,そのメカニズ
ムの解明と精度分析法の構築を試みた.また,計測特性の統計的性質を用いて誤差伝播
メカニズムのモデル化を行い,実際の誤差特性と本モデルを比較して検証を行った.こ
こで提案したモデルは,手法ごとの性能の違いを定性的に表現可能であり,定量的評価
についても一定の可能性を示した.このモデルを用いた性能分析の結果,積分型手法と
高次展開型時空間微分法は,いずれも従来型手法に対して同程度の精度改善を果たして
いた.このような誤差伝播モデルは,PIV 計測精度の管理や,新手法開発における指針
を示すものである.
第 6章では,本論文の成果を総括し,得られた結論について述べた.

- 6 -

- 7 -
第2章 相関情報の時空間解析
本章では,本論文の中核を担う新しい計測の概念について述べる.2.1節では,PIV
の基本原理について説明するとともに,代表的な PIV 計測アルゴリズムの例を示す.
2.2 節では,時空間相関情報の概念を導入し,速度を時空間に存在する「場」と捉えて
解析対象とすることにより,次世代の PIV 解析手法に対する提案を行なう.さらに,
この概念に基づいた新しい計測手法の開発に対する方針についても合わせて述べる.
2.1 計測原理
2.1.1 PIVの基本原理
PIV では,流体運動をトレーサ粒子で可視化した上で画像として捉え,これをある
時間間隔で撮影することにより,流体速度を求める.つまり,トレーサ粒子の運動に追
随して変化する可視化画像の移動を解析することにより,間接的に速度場の計測を行な
う.本節では,PIVにおける画像解析の基本原理について西尾らが行なった研究成果を
引用し[26],計測の基礎方程式の導出を行なう.
基礎方程式
ここでは,時系列で取得された可視化画像における輝度分布を時空間に存在する輝
度関数 ),,( YXtf とおくことにする.輝度関数 f は時間経過とともに移動してゆくが,
その様子を概念的に表すと,Fig.2.1に示すようになる[27].
Fig.2.1 Schematic view of luminance function and its change[27].

- 8 -
Fig.2.1は, f 上のある着目点 ),,( 000 YXtf が,ある時間間隔 t を隔てて分布ととも
に移動し, ),,( 000 YYXXttf に現れる様子を示している.ここで,輝度関数 f
が時空間の全領域で微分可能であり,時間間隔 t が f の移動速度 vu, に対して十分小さ
いものと仮定すると, f は時空間でテイラー展開可能である.そこで, ),,( 000 yxt まわ
りで f をテイラー展開すると,移動後の輝度 ),,( 000 YYXXttf と ),,( 000 yxtf
の関係を(2.1)式に表すことができる.
fY
YX
Xt
tn
fY
YX
Xt
tfY
YX
Xt
t
XXtfYYXXttf
n
!
1
!2
1
!1
1
),,(),,(
21
000000
(2.1)
ここで,Fig.2.1に示したような照明強度の不均一ならびに変動を無視できるものと
仮定すると,移動前後の輝度値は変化せず,(2.1)式左辺は 0 となる.さらに, t が十
分小さく 2 階微分以下の項を無視できるものとすると, tvYtuX , と表して
(2.2)式の微分方程式を考えることができる.
0
Y
fv
X
fu
t
f
Dt
Df (2.2)
(2.2)式は f に関する移流方程式であり,輝度の実質微分が 0になることを意味して
いる[28].これは,連続的な時空間における輝度分布の変化に対する支配方程式であり,
時空間の全領域で成立する.(2.2)式における未知変数は速度 vu, であり,(2.2)式は時空
間微分法[27][29]の計測原理に相当している.
ところで,実際の PIV計測では,時間間隔 t が速度 vu, に対して大きい場合も存在
する.この場合, t方向の輝度の連続性が低下するため,2 時刻の離散情報から輝度勾
配を求めることが事実上不可能となる.この問題は支配方程式が微分方程式で書かれて
いることに起因しており,このような状況で画像移動量を求めるためには,輝度関数の
移動を積分方程式で記述する必要がある.そこで,Fig.2.1 のように, f 上のある着目
点 ),,( 000 YXtf の移動を改めて時空間領域で考えると,Fig.2.2に表すことができる.

- 9 -
A
'AkS
tt 0
0t X
X
Y
Y
0t
),,( 000 YXtf
),,( 000 YYXXttf
Fig.2.2 Schematic view of movement of a point on the luminance function.
Fig.2.2 は,着目点 ),,( 000 YXtf がある曲線 Sに沿って移動する様子を示し,時間間
隔 t を隔てて ),,( 000 YYXXttf に移動する様子を示している.このとき,Sは
着目点の流跡線に相当し, Sに沿った(2.2)式の線積分を考えると,(2.3)式を得る.
S
YXtfYYXXttfdSDt
Df0),,(),,( 000 (2.3)
また,この積分から得られる積分値は,着目点の始点と終点の輝度値の差として表
される.さらに,(2.2)式同様,照明強度の影響を無視できるものと仮定すると,(2.3)
式の積分は 0になる.ここで,輝度関数が不連続点を持たず,時空間の全領域で微分可
能であるものとすると,この区間の画像移動量 ),( YX さえ与えることができれば,
(2.3)式の積分は積分路に関わらず 0 となる.したがって,(2.3)式左辺の積分を直接解
く必要は無くなり,時間間隔 t を隔てた 2 点の輝度値のみを用いて計測の支配方程式
を定めることが可能になる.このとき,支配方程式における未知数は,画像移動量
),( YX のみとなる.このような方程式を用いて画像移動量の評価を行なえば,相対的
に t が大きく,直接(2.1)式の微分方程式を解けない場合でも画像移動量を求めること
が可能になる.

- 10 -
「場」で与えられる評価関数
ここまでは,PIV における計測の基礎方程式を微分および積分方程式で表せること
を示してきた.しかし,(2.2)式および(2.3)式はいずれも 2 つの未知数を含んでいるた
め,最低 2点で方程式を連立しなければ,解を得ることはできない.ここでは,これを
一般化して考え,Fig.2.2に Aで示したある区間に存在する f の分布に対し,統一的に
「場」で与えられる評価関数について考える.
ところで,これまで,照明強度の不均一や変動を無視してきたが, t が大きい場合は
これが主要な問題となる場合が発生する.ここでは,この影響を無視して統一的な解法
を示すため,検査領域内の輝度分布に対して(2.4)~(2.6)式の標準化を行なった輝度分布
を考える.
A
A fdA (2.4)
A
AA dAf 22 )( (2.5)
A
Aff
ˆ (2.6)
(2.4),(2.5)式の A および A は検査領域 Aにおける輝度分布の平均値および標準偏
差を示し,(2.6)の f̂ は標準化後の輝度値を示す.このように検査領域内で標準化された
輝度分布は,輝度の分布形状の変化を照明強度やコントラストの変化から分離して評価
することを可能とする.
ここで,(2.2)式に基づく「場」の評価関数を考えることにする.(2.2)式が Fig.2.2
のAのような領域全体で成立するための条件は,(2.2)式のノルムを用いて記述できる.
A
dADt
fD0
ˆ2
(2.7)
(2.7)式は,(2.2)式右辺の残差とノルムを測る評価関数である.この方程式は,実際
に時空間微分法を PIV に用いる場合にも同様の評価指標が用いられている.さらに,
(2.3)式のように流線に沿って評価する場合に対してもノルムを用い,(2.8)式を得る.

- 11 -
0ˆˆ2)ˆˆ(
)ˆˆ(ˆ
122
1
21
2
A
kk
A
kk
A
kk
AS
dAffdAff
dAffdAdSDt
fD
(2.8)
(2.8)式は,(2.3)式のノルムを積分して得られる評価関数であり,ここでは 1,2 時刻
目の輝度分布についてはそれぞれ 1ˆ,ˆkk ff として省略して表している. 1
ˆ,ˆkk ff が各々
の平均・分散を用いて標準化されている場合,(2.8)式右辺 2行目第 1項は一定値 A2 を
取る.したがって,(2.8)式の増減は 2 行目第 2 項に依存する.(2.8)式が成立する条件
は 1ˆˆ kk ff が成立する場合であり,このとき,(2.8)式 2 行目第 2 項は最大値をとる.
2行目第 2項は 1ˆ,ˆkk ff に対する相関係数となっており,一般的に広く用いられている
画像相関法[10][30]においては,この相関係数を計測原理に用いている.
(2.7),(2.8)式のように計測領域を「場」に拡張すると,解析対象は速度「場」へと変
化することとなる.しかし,速度場は必ずしも一定とは限らず,時空間領域では曲面と
して存在している.したがって,(2.7),(2.8)式に基づいて PIV解析を行なう場合,その
解析対象は,速度場が時空間領域で形成する曲面となることが理解できる.曲面の取り
うる可能性は無数に存在することから,実用的には計測対象領域を分割したり,曲面の
形状を平面などに限定することにより,計測を行なうことになる.次節以降では,PIV
で実用的に用いられている相関法と時空間微分法の計測アルゴリズムを解説する.
2.1.2 相互相関法
本節では,本研究の時空間解析の基礎となる相関法の計測原理について解説する.
相関法は,粒子画像内のある領域の輝度分布を計測対象とし,輝度分布の移動量を求め
ることにより速度の計測を行なう手法である.相関法では,画像の濃淡分布に着目し,
次の時刻においても同様の分布が画像上に現れることを仮定して,これらの類似性を評
価することによって対応粒子像の同定を行なっている.輝度パターンの類似性評価には
相関係数が用いられ,これは(2.9)式で定義される.
.),,(ˆ),,(ˆ),;,,( 0002000100012 A
yYxXttfYXtfyxYXtC (2.9)
ただし, ),,( 000 YXt は 1 時刻目における画像平面上での計測対象点の位置を示し,

- 12 -
),( 00 yYxX は 2時刻目における評価対象輝度分布の位置を示す.ここでは,(2.6)式
のように各々の平均・分散で標準化された粒子像 21ˆ,ˆ ff を用いている.また,Aは輝度
分布の評価対象領域に相当する.(2.9)式は,前節で示した(2.8)式 2 行目第 2 項と同様
のものであるが,ここでは離散的に与えられる輝度分布を対象としているため,離散型
で表記されている.
Correlation area ACandidate Area
Search area S
0tt ttt 0
Fig.2.3 Schematic view of an investigation of similar luminance patterns from
two images in DCC method.
相関法では,(2.9)式を評価指標とし,最も高い相関値を与える解 maxmax , yx を求め
ることを目的としているが,これを(2.9)式から直接求めることはできない.これは,(2.9)
式の基盤となる(2.8)式左辺において,未知数 kS が積分経路となっており,陽に解けな
い性質を持っているためである.このような理由から,相関法ではあらかじめ解の存在
範囲を限定し,その中で解の取り得る可能性全てについて検討して,最適解を求める必
要がある.
Fig.2.3 に DCC 法における輝度パターンの移動検出の概念図を示した.1 時刻目で
着目する計測対象領域は相関領域と呼ばれ,(2.9)式の 1f̂ に相当する.そして 2 時刻目
の画像において,相関領域の周りに探査領域を設定する.探査領域の設定は,解の存在
範囲を限定する操作に相当する.また,探査領域内の任意の点を中心とする,相関領域
と同サイズの領域は候補領域と呼ばれ, 2f̂ に相当している.探査領域の中で ),( yx を順
次変更してゆくと,それぞれの ),( yx に対応する相関係数 ),;,,( 00012 yxYXtC が求められ
る.Fig.2.4に,計測で得られる相関係数分布の一例を示す.

- 13 -
Fig.2.4 An example of correlation map in DCC method.
Fig.2.4は相関係数 12C をカラーマップで表示し,2次元分布で表示したものである.
相関分布の原点Oは Fig.2.4 の yx, 軸の交点に位置し,原点は 1f̂ の座標 ),,( 000 YXt を,
),( yx は 2f̂ の相対的な座標をそれぞれ示す.この分布における最大値は,その点で 1f̂ と
最も類似性の高い 2f̂ が得られたことを意味している.畳込み積分で得られる Fig.2.4
の相関係数分布を直接解析対象とする直接相互相関法(Direct Cross Correlation
method: DCC 法)[10][30]では,最大値を示す点を相関領域内で逐次探査した上で,最
大値の相対位置 ),( maxmax yx を着目粒子像の移動量として用いている.通常は,計測対
象区間の移動速度が時空間で一定であるものと仮定して, ),( maxmax yx を t で除すこと
によって速度 ),( vu を求めている.そして,画像上で着目点 ),,( YXt を移動しながら一連
の処理を行い,各々の着目点で速度 ),( vu を求め,最終的には画像全体の速度分布を求
めている.
2.1.3 時空間微分法
前節では画素単位のPIV解析に用いられる相関法の計測アルゴリズムについて述べ
たが,本節では,空間解像度に優れており本研究でサブピクセル解析に用いる時空間微
分法の計測アルゴリズムについて解説を行なう.時空間微分法は,(2.2)式で示した微分
形式の支配方程式に用いているため,画像の計測間隔 t が小さい場合を前提に計測原
理が構築されている.また,時空間微分法の支配方程式における未知数は vu, の 2つで
あるので,最低 2点で方程式を連立すれば解を求めることができる.このような理由か
ら,時空間微分法は極めて高い空間解像度で速度場を求めることが理論上は可能である.
一方,実際に計測対象となる画像はノイズが含まれる場合もあり,微分を用いる方程式
の性質上ノイズに対するロバスト性が低いという問題点も指摘されている[31].これに

- 14 -
対して,一般的には相関法で用いたような相関領域の中で複数の支配方程式を連立し,
最小二乗法を適用してノイズに対するロバスト性を獲得している.
(a) (b)
0tt ttt 0
Fig.2.5 An example of measurement objective pair image in gradient method.
Fig.2.5に時空間微分法の解析対象となる一組の画像を表示した.これは,前節の相
関法を用いて同定された 2画像であり,互いに僅かなずれを生じている.このような微
小な画像移動の解析においては,時空間微分法の適用が有効である.時空間微分法では
2.1.1 節で示した(2.2)式を支配方程式に用いており,これを複数の点で連立させ,サブ
ピクセル単位の画像移動速度 subsub vu , を求めている.また,与えられる情報は Fig.2.5
のように離散的な輝度分布であるので,実用的には(2.2)式を離散化し,輝度勾配を差分
近似によって推定して方程式を解くことになる.前節で示した相関法と組み合わせて用
いる場合には,Fig.2.5のような相関領域 Aの中で最小二乗法を適用し,解を求めてい
る.最小二乗法における評価関数は(2.10)式で与えられる.
A subsubY
fv
X
fu
t
fR
2
(2.10)
A
A
sub
sub
AA
AA
Y
f
t
f
X
f
t
f
v
u
Y
f
X
f
Y
f
Y
f
X
f
X
f
2
2
(2.11)
(2.10)式は,(2.2)式の残差の二乗和に相当する.時空間微分法においては,支配方
程式である(2.2)式が線型方程式であるので,評価関数 Rを最小にする解は,相関法とは
異なり,(2.11)式の連立方程式で与えられる.これを解くと,サブピクセル移動量
subsub vu , を求めることができる.(2.11)式から得られた subsub vu , とピクセル単位で解析
された速度 ),( pixpix vu を組み合わせると,最終的な速度計測結果が与えられる.

- 15 -
2.2 時空間解析に基づく流場の多次元解析
前節では,PIV の基本原理を示すとともに,相関法および時空間微分法の計測メカ
ニズムについて述べた.PIV解析の最終的な目標は,対象とする画像全体の速度場を求
めることであるが,相関法に代表される従来の PIV 手法では,画像上のある一点にお
いて計測される速度の集合として速度場を求めている.しかし,2.1.1節でも示したが,
PIVの計測目的である速度場は,時空間領域に存在する曲面となっている.このような
観点に立つと,従来のように「点」での速度を求める解析ではなく,「場」を解析対象
として速度場を時空間の曲面として直接取り出す解析が,本来取るべき方法であると考
えられる.本節では,相関法の計測原理を発展させて新しい概念を導入し,画像上の速
度分布を「場」として解析する新しい PIV解析手法を提案する.
2.2.1 時空間相関情報
2.1.2節で示したように,相関法では Fig.2.4のような相関分布を一つの計測点で算
出し,ある一点での速度ベクトルを求めている.画像面内の速度場を得る過程では,こ
の処理を時空間領域に存在する複数の計測点において行い,最終的な分布を求めている.
このとき,時空間領域の全ての計測点において相関分布が与えられることになる.
y
x
tY
X
Fig.2.6 Schematic view of spatio-temporal distribution of correlation
information.
Fig.2.6は,相関分布が計測物理時空間で分布する様子を概念的に示したものである.
Fig.2.6における赤い正方形は,ある着目点における相関分布を意味しており,DCC法
を時系列画像に対して適用する場合には,相関分布が時空間領域に分布して現れること

- 16 -
になる.ここで,2.1.1 節で示したように,画像相関情報は,時空間に分布する連続的
な輝度関数のうち 2断面の情報を用いて表されている.そして,これらの 2断面の時間
間隔 t の大きさは光学機器の性能に依存する.従来は量子化誤差やノイズの影響を低
くする目的で流場に対して比較的大きい t を用いていたことや,画像の空間解像度や
サンプリング周波数に対するハードウェアの制約から時空間で隣り合って存在する相
関分布同士の関連性が薄く,複数の相関分布を一括して取り扱うことは容易ではなかっ
た.しかし,近年の発達した光学機器から得られる高密度・高精細画像を用いる場合に
は,流場の時空間での変動スケールよりもはるかに小さいサンプリング周波数や空間解
像度で画像情報を取得できる.これにより,時空間領域で高密度の相関情報を得ること
が可能になる.高密度の時空間相関情報を PIV の画像解析に用いると,時空間方向の
相関情報の変動を計測原理に取り入れることも可能になる.このような観点に立つと,
速度を直接「場」として取り出す新しい PIV 解析手法開発の可能性が拓かれるものと
考えた.
前述のような観点に立つと,相関分布を時空間領域で解析する方法を改めて検討す
ればよいことが分かる.Fig.2.7 は,相関情報の時空間での変化を模式的に表わしたも
のである.Fig.2.7 では,相関平面 ),( yx を簡略化して 1 軸で表わし,計測の画像平面
),( YX も同様に 1軸で表わしている.このように模式化すると,時空間に分布する相関
情報を 3軸で表現することができる.Fig.2.7(a)は PIV解析結果の一例を示したもので
あるが,計測対象領域外側面の相関分布が見えており,時空間での相関分布の変化が分
かる.Fig.2.7(b)は,対象領域内部に存在するある断面を表示するとともに,比較的高
い相関値における等値面を示したものである.Fig.2.7(b)から,このような情報体の内
部においても相関情報が連続的に変化する様子が確かめられる.さらに,相関値がある
水準を超えると,時空間方向に連続性を持った一対の等値面が現れることが分かる.
Fig.2.7(c),(d)は,相関値の上昇に伴う等値面の変化を示したものである.Fig.2.7(c)から,
相関値が上昇することによって等値面同士の間隔が徐々に狭まってゆき,一枚の曲面へ
と近づいてゆく様子が分かる.しかし,Fig.2.7(d)に示すように相関値がある水準を超
えると,それまで連続的に分布していた等値面に欠落箇所が現れるようになる.これは,
着目点近傍の流場状況によっては,画像変形や面外速度のような計測原理で考慮されて
いない誤差要因が大きくなり,高い相関が得られなくなるためである.

- 17 -
yx,
YX ,t
)(a )(b
)(c )(d
Fig.2.7 Schematic view of spatio-temporal correlation information.
(a)over view, (b)example of cross section, (c),(d) example of equi-contour curved
surface
従来の PIV 解析では,計測対象点 ),,( YXt における相関情報を単独で解析してきた
が,これは Fig.2.7においては,水平面内のある一点で高さ方向にのみ相関情報を分析
してきたことに相当する.本研究は,Fig.2.7(c)で示される相関情報の中央を通る曲面

- 18 -
を計測対象とし,これを多次元解析に基づいて求めることにより,より高度な PIV 解
析の実現を目指すものである.
Fig.2.8 The advantage of multi-dimensional analysis for correlation information.
Fig.2.8は,このような多次元解析の利点を分かりやすく示したものである.Fig.2.8
は,模式化された Fig.2.7(a)の時空間相関情報から時間軸 tに沿って切り出した断面を
示し,横軸が時刻,縦軸が簡略化された相関空間を示す.図中央横方向に相関値の高い
領域が連なっているが,相関値自身は画像の状態や剪断や回転などの流場の状況により
変化している.従来の PIV 解析では縦軸方向にのみ極大値の検索を行ってきたが,相
関値のピークが鈍る(A)で示す領域や複数の同程度の極大値が現れる(B)の領域では,精
度の劣化や誤ベクトル発生を招く可能性があることが分かる.本研究は,Fig.2.8 にお
いて相関情報の横方向の連続性や整合性も合わせて検討することにより,精度向上を目
指すものである.
2.2.2 高次解析手法
前節では,本論文で解析対象とする時空間の速度場を与える曲面が,時空間相関情
報においては相関極大値位置の集合として与えられることを示したが,本節では時空間
相関情報から「場」を取り出すための具体的な解析手法開発の方針を示す.相関値の時
空間における連続性や整合性を検討するためには,Fig.2.7 に模式的に示した相関分布
において水平方向の変化を分析可能な評価方法を考える必要がある.ここでは相関分布
を 2次元で表記し,ある時空間座標軸に沿った相関分布の変化を分析することにした.

- 19 -
Fig.2.9 Continuous change of correlation maps in time series.
Fig.2.9は,多次元空間に分布する相関情報を物理空間の1軸,例えば時刻に沿って
抽出したものである.Fig.2.9では対象の時間区間の両端では ),( yx 平面の相関分布を示
しているが,区間内では比較的高い相関値の等値面を表している.Fig.2.9 では相関係
数が時系列で変化し,等値面で表わされる相関値の高い領域の位置が連続的に変化する
様子が分かる.速度場は ),,( tYX の時空間で変化するため,Fig.2.9 と同様の変化が 3
方向に存在する.Fig.2.9においては,解析対象とする速度場は t軸方向の曲線として存
在しているが,実際にはこれらが 3次元の広がりを持つことになる.この分布をいかに
して評価するかがここでの問題の焦点となる.
Fig.2.8 は Fig.2.9の等値面で囲まれた内部を断面として示していることに相当する
が,この断面内の相関値の最大値は,Fig.2.9 においては中央に緑色で示される筒状の
図形内部に存在している.したがって,各断面の最大値の包絡線が,速度の時系列変化
もしくは空間的変化を与える曲線になると考えることができる.このような曲線を相関
分布の中から適切な評価指標の基で決定することができれば,速度だけでなく速度勾配
やその変化率といった高次の物理量の解析も可能になると考えられる.また,Fig.2.9
の時間軸に沿った解析に留まらず ),,( YXt の 3 次元空間での解析を行うことにより,速
度場の時空間解析が可能になる.

- 20 -
t
yx,
YX ,0u
tDt
D
uu0
Fig.2.10 Schematic view of solution plane of gradient method.
Fig.2.10は,Fig.2.7(d)と同様の図であるが,微分解法である時空間微分法で仮定し
ている解平面と時空間相関情報との関係を模式的に表した図である.Fig.2.10 では,
Fig.2.7(d)のように相関値の極めて高い点の等値面を表示している.時空間微分法では,
2.1.3 節で示したように画像上のある領域において(2.9)式のような連立方程式を立てて
領域内の平均的な速度を求めている.このとき得られる解は,時空間のある領域内の平
均的な速度を与えることになる.これは,Fig.2.10 に青色で示す YXt , 平面に対して
平行な面に相当しており,このような平面を用いて相関最大値の包絡面を近似していた
ものと理解できる.また,Fig.2.10では時空間相関情報に対して比較的大きい平面が描
かれているが,実際には,極めて小さい領域で平面近似を行っている.
Fig.2.10 に示した時空間相関情報と時空間微分法の関係を考慮すると,速度場の近
似平面を Fig.2.10 に緑色で示す傾いた平面とすることにより,従来よりも高度な解析
を考えることができる.このとき,解析対象は速度だけでなくその速度勾配も含まれる
こととなる.これに伴って,速度場に対する解平面の近似精度も向上し,より高い精度
での解析が可能になるものと思われる.

- 21 -
2.3 結言
第 2 章では,時空間相関情報の概念を示すとともに,これに基づく流場の多次元解
析について提案を行なった.2.1節では,連続的な輝度空間における PIVの基本原理を
示し,PIVで広く用いられている相関法と時空間微分法が,(2.1)式を起点として同一の
概念で表されることを示した.さらに,相関法と時空間微分法の具体的計測アルゴリズ
ムを示し,従来行なわれてきた基本原理の具現化について説明した.
2.2節では,高速度・高精細画像から得られる相関情報が高密度の情報体となってい
ることに着目し,これを利用した新手法開発の可能性について述べた.時空間のある一
点における相関最大値位置は,その点の速度に対応するため,時空間のある領域におけ
る相関最大値の集合は,その領域の速度場を与える曲面に相当することになる.このよ
うな観点に立つと,時空間領域で相関情報を一括解析し,領域内の速度分布を「場」と
することによって,従来よりも高度な PIV解析が可能になることが分かる.

- 22 -

- 23 -
第3章 PIV高次解析手法の開発
本章では,第 2章で示した時空間相関情報の概念に基づいて PIV高次解析手法の開
発を行う.高次解析手法では,時空間領域に存在する相関情報を流場の評価に用いるこ
ととする.具体的には,相関値の積分および微分を評価に用いることにより,手法開発
を行う.
3.1節では,相関値の積分に基づく解析手法の計測原理を示す.この原理から導かれ
る計測の支配方程式は,陽に解けない性質を持つと同時に高次の解析へと展開するにし
たがって飛躍的に計算量が増大する性質を持つ.この方程式に対して計算過程の効率化
を行い,具体的アルゴリズムを開発する.
3.2節では,相関値の微分に基づく解析手法の計測原理を示す.微分型手法では,従
来用いられてきた相関法の性質に着目し,相関法を相関分布に対して繰り返し適用する.
これにより,帰納的に高次展開可能な手法を開発し,高次解析に伴う処理の複雑化を克
服する.
3.3 節では,流場の真値が既知である VSJ 標準画像を用いて新手法の性能を評価す
る.計測結果から得られる流場を分析し,流場の高次解析法の有用性を明らかにする.
また,真値と計測値の比較から,アルゴリズム性能の定量的評価も合わせて行う.
3.1 積分型解析手法
3.1.1 計測原理
前章では,相関係数の高い値の領域が,時空間で曲面(実際には 3 次元の解の集合)
として分布し,これを同定することが PIV 解析の最終的な目標であることを示した.
これを具体的な計算アルゴリズムで実現するには,得られた曲面の妥当性を示す評価指
標が必要となる.曲面の評価指標には,曲面上の相関値の大小が直接的には重要となる
が,そのほかに曲面の連続性や滑らかさも考慮されるべきである.評価法としては,与
えられた曲面上での相関値の積分値や微分値の統計指標,さらに周波数解析などが考え
られるが,ここでは積分に基づく評価指標について述べる.
Fig.3.1 は本節の PIV 評価指標で用いる相関情報の評価法を模式的に表したもので

- 24 -
ある.図中 ),( yx は相関空間を表し,xは物理的計測空間 ),,( YXt を表す.本計測手法で
は,前述のように速度変化を時空間における曲面として抽出するが,Fig.3.1 ではこれ
が一本の赤い曲線で示されている.これを解曲線 optu と呼ぶことにする.各計測点にお
いては,原理的には相関値の最も高い位置がその点における速度を与えるので,解曲線
は相関値極大点を連結したものとなる.しかし,実際にはノイズや実験誤差などにより,
極大点を単純に結ぶ以外の要件で曲線を評価する必要がある.ここでは,複数の相関分
布を総合的に評価する観点から,(3.1)式で示される積分による評価指標を用いることと
する.
Fig.3.1 Schematic view of the evaluation technique for correlation information in
the present analysis.
)(
),;())((
xu
xxxu dyxCC (3.1)
(3.1)式において ),;( yxC x は計測点 ),,( YXtx における相関値の分布を示し, )(xu は
一つの解曲線の候補を示す. ))(( xuC は, )(xu に沿って相関値を積分した値であり,も
し )(xu に各断面の極大値を貫く曲線を与えることができたならば, ))(( xuC は与えられ
た空間での最大値をとる.したがって,本計測では,この最大値を与える曲線を見つけ
ることが命題となり,(3.2)式のように表すことができる.
))(())((max))((
xuxuxu
optLg
CC
(3.2)
本計測原理では(3.1),(3.2)式を支配方程式とするが,(3.1)式は通常の積分方程式とは
異なり,積分経路が未知数となっているため,陽に解くことはできない.そこで,
(3.1),(3.2)式の解を求めるには,解が存在するであろう空間 ))(( xuL を設定し,その中で
条件を満たす解を求める.

- 25 -
残された問題は,解の候補空間 ))(( xuL にどのような空間を採用するかである.
))(( xuL に全ての任意な曲線を含む空間を採用すると,前述のように解は単純に極大値
を結ぶ曲線となってしまう. )(xu の連続性や滑らかさを評価の一部として取り入れる
としたら, ))(( xuL にあらかじめ制約を加えておき,不適切な解を排除することも一案
である.そこで本論文では,速度場の連続性や微分可能であることを勘案し,(3.3)式で
表されるテイラー展開で与えられる空間を ))(( xuL に採用することにした.
)(!2
1
!1
1 32)2()1()0( o xuxuuxu (3.3)
(3.3)式において,左辺 )(xu は(3.1)式における積分経路であり,時空間 ),,( YXtx にお
ける速度場の変化を示す. x は計測空間の中心からの距離であり, )0(u , )1(
u , )2(u は計
測中心点における速度と 1 階および 2 階の微係数を示している. x は 3 次元の空間で
あるので,(3.3)式は本来交差項を含む 3次元の展開が必要であるが,ここでは議論を簡
単にするために 1次元で表記している.また, )( 3o はテイラー展開の 3次以上の高次
項であり,本論文ではこのような表記を用いることにする.
さて,具体的に解を求めるためには,(3.1)式に(3.3)式を代入し,時空間の相関領域
内で可能な ),,( )2()1()0(uuu の組み合わせの中から,(3.2)式を満足するものを見つける作
業が必要となる.この作業は,従来のPIV解析の場合は,相関領域のサイズを 11 nn pixel,
解析対象の時刻又は点数をm個とすると,(2.4)式の相関係数の計算が 21nm 回必要であ
った.これを本手法に置き換えると,従来と同じ回数の相関係数の計算に加えて
)2()1( ,uu のパラメターに対応した(3.1)式の計算が必要となり,おおよそ 23
22
21 nnnm
回の計算が必要となる. )2()1( ,uu の探査領域サイズに相等する 32 ,nn を仮に 10pixel 程
度と見積もっても,1万倍の計算が必要になる.
本論文では摂動法的な考え方を取り入れて,計算効率の向上を試みた.これは,(3.3)
式において x が微小パラメターとして取り扱え, )2()1()0( ,, uuu の各変数が )1(O の範囲
でしか変化しないと仮定すると,低次の項は高次の項に比べて支配的であるとすること
ができる.すなわち, )0(u は )1(
u 以下の項の影響を受けることなく決めることができ,
)0(u が一旦決まれば,その限定的な範囲の中で )1(
u を決定することができる.先に挙げ
た例では,全体の計算が全てのパラメターの積になったのに対し,本手法では,
)( 23
22
21 nnnm となり,実用的な範囲内での計算量に収めることができる.

- 26 -
3.1.2 積分型アルゴリズム
本節では,前節で述べた時空間相関情報の多次元解析を具体的に行う計算手法につ
いて述べる.前節(3.3)式で示した展開式はベクトル形式で記述されているが,速度の X
方向成分 uについて時空間変数 ),,( YXt で表記すると,(3.4)式で表される.1 次近似項
では 3成分,2次近似項では交差項も含めて 6成分が現れることとなる.
)(
2
1
),,(
3222
2
2
22
2
22
2
2
)0(
oXtXt
utY
tY
uYX
YX
u
tt
uY
Y
uX
X
u
tt
uY
Y
uX
X
uutYXu
(3.4)
本研究は,速度場を時空間における多次元平面として捉え,解析することを目的と
しているが,(3.4)式を直接計算機上で取り扱うのは容易なことではない.そこで,(3.4)
式に線形の仮定を行い,座標軸ごとに独立に取り扱えるとして,アルゴリズムの構築を
行った.さらに,ここでは簡単のため,第 2次項についても 222222 ,, XuXutu
は独立であり,個別に求めることができるとし,交差項については本論文では考慮しな
いこととした.これにより,計算手順は簡略化され,計算量も少なくなる.
Fig.3.2 Schematic view of zero-order accumulation.
本アルゴリズムでは, ),,( YXt 各軸に沿って低次から順次微係数を求めてゆく.
Fig.3.3 は,本アルゴリズムにおける第 0 次の解析過程を模式的に表したものである.
),( yx は相関平面を表し,tは計測時刻であり着目する物理空間の座標軸である.Fig.3.2

- 27 -
では,各時刻で得られた相関分布を時系列で並べて表示している.直方体に見える部分
は相関領域と計測区間の領域であり,その内側に相関値の高い領域が等値面で示されて
いる.ここでは,(3.3)式における ),( )0()0()0( vuu を求めるが,相関係数分布および )0(u の
評価は前節(3.1),(3.2)式を用いる. )0(u は,計測区間において一定値であるから,第 0
次の解析における(3.1)式による評価は,相関係数分布の t 軸に沿った積分となり,
Fig.3.2 右側に投影された)0(
C の分布となる.この)0(
C の中で最も高い値を示す位置を
与える )0(u が第 0次解析の解となる.
Fig.3.3 Schematic view of zero- and first-order accumulation.
Fig.3.3 は,1 次解析過程の模式図である.図中央の相関分布は Fig.3.2 で示したも
のと同じであり,黒破線の直方体で示されている部分は,0次解析で得られた解 )0(optu の
まわりに 1次解析用の相関領域を設け,(3.1)式にしたがって積分値の投影を行っている.
本アルゴリズムでは摂動法的な仮定を設けているため,1次解析では )0(optu のまわりで最
適な勾配 )1(u の探索を行う.また,線形の仮定から, ),,( YXt の勾配はそれぞれ個別に
求めることができるので,ここでは t方向の勾配のみの候補を検討する.
1 次解析では,この赤破線に沿って相関係数分布を積分し,(3.1)式で示す評価指標を
求めるが,分布の状態によっては相関領域中央以外に解が現れる場合も想定し,各勾配
に対して 1次解析用相関領域内で(3.1)式の積分を行い,)1(
C の分布を得ている.したが
って,Fig.3.3の)1(
C の分布は, ),( )1()1()1( vuu の候補空間の中に,1次解析用の相関空間
が存在する 2重構造となっている.この分布の例を Fig.3.4に示す.
- 28 -
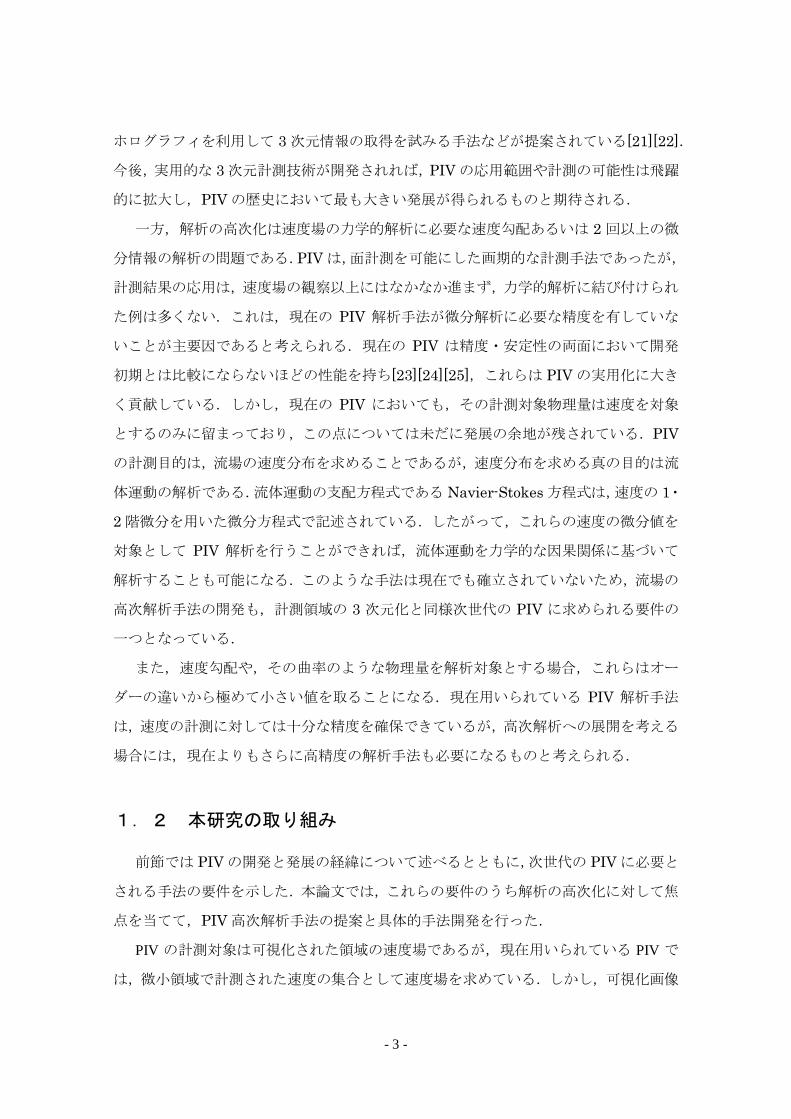
Fig.3.4 Accumulated correlation maps in first-order analysis.
Fig.3.4は,1次解析用相関領域で得られた)1(
C の分布群を )1(u で整理し,配置したも
のである. ),( )1()1()1( vuu は画素単位の勾配(pixel/interval2)で変化させている.図中央
は 0 次解析の)0(
C と同じ分布であり,その周囲に速度勾配を与えたときのC の変化が
分かるようになっている.厳密な摂動法の過程では )0(optu は図中央の 1点の
)0(C で与えら
れるから,1次解析用の相関領域は不要であるが,ここでは解析の流れと仕組みを理解
することと,0次と 1次の解析の組み合わせの可能性を示すため,周囲の分布も示して
いる.Fig.3.4の例では,C が最も高い位置は )0,0(),( )1()1( vu の分布の中央の値である
が,周囲の分布は右斜上方向でやや高い値を示す傾向がある.この傾向はサブピクセル
解析で定量的に抽出することになる.
Fig.3.5 は,Fig.3.2,3.3 と同様に図中央に時系列相関分布があり,赤破線の直方体
で 1次解析までで得られた解 toptopt )1()0(
uuu を示す.2次解析では,uの 2階テイラー
展開に基づいて 1次解析解のまわりに放物線の解を仮定し,(3.2)式を満たす解を求める.
計算手法は 1次解析とほぼ同じで,放物線のパラメターを変えて積分路を変え,それに
よって得られる)2(
C の分布を画素単位で解析し,さらにサブピクセル解析を行い,2階
微分項を求める.ここでは, )/,/( 2222 tvtu を求めていることに相等しているが,
原理的には同じオーダーで Xtu /2 などの交差項も同時に解析する必要が生じる.こ
れは,Fig.3.5で示す解析と,1次解析解の ),( YX 方向への変化量を同時に解析,評価す
ることを意味している.しかし,ここでは複雑さを避けるため,本節冒頭で述べたよう

- 29 -
に各軸に沿った変化は独立に扱えるとし,Fig.3.5 で示した 2 次解析だけにとどめるこ
ととした.
Fig.3.5 Schematic view of second-order accumulation.
Fig.3.6 は,本アルゴリズムの計算手順をフローチャートで示したものである.本ア
ルゴリズムでは,(A)の過程で時系列の粒子画像 if を取り込み,(B)において従来の相関
法と同様の手順を施して,時空間相関情報 ),;,,( YXYXtC を求める.(C)では,時空間 x
のうち,ある一軸に沿って相関分布 ),;,,( yxYXtC を抜き出し,(3.1),(3.2)式を用いた各
次数の解析を行う.各次数の解析は,Fig.3.2, 3.3, 3.5で示した手順に従い,低次から
順次求め,対象とした軸に沿った速度および微係数を求める.時空間での解析は,この
手順を ),,( YXt の各軸方向に施し,全ての微係数を独立に求める.0 次の解析について
は,3 方向についてそれぞれの解 )0()0()0(,, YXt uuu が得られる.本来ならば, ),,( YXt 3 方
向に対して得られる)0()0()0(
,, YXt CCC をさらに結合して )0(u を求めるべきであるが,ここ
では簡略化をし,平均操作などにより最終解を決定している.

- 30 -
Fig.3.6 Flow chart of present algorithm.
以上の議論では基本的な多次元解析アルゴリズムについて述べたが,具体的な解析
では,各次数の解析においてサブピクセル解析が必要となる.Fig.3.7 は,0 次解析で
用いる各時刻における相関分布 iC とその積分結果である)0(
C の例である.(a)に示す各
iC では中央 4 画素に相関値の高い点が現れており,各時刻での極大値は左下から右上
に移動する傾向が判る.(b)に示す)0(
C では,中央右上に極大値が現れるが,周囲の相
関値の分布状況から,この点よりさらに中央寄りに,真の極大点が在ることが推測され
る.サブピクセル解析には,時空間微分法の応用や画像変形法の応用も考えられるが,
ここでは最も一般的なガウス分布近似を用いる手法を採用することにした.ガウス近似
の詳細については付録 Aに記述した.
1次解析は評価関数)1(
C を用いるが,これは Fig.3.4で示したようになる.Fig.3.4で

- 31 -
は,図中央に最も高い)1(
C が現れるが,周囲の)1(
C の分布は若干右上に偏る傾向が見ら
れる.これは,Fig.3.7(a)において iC の極大値が左下から右上へ移動する傾向と一致す
る.基本的には Fig.3.4についてのサブピクセル解析が必要であるが,データ量も多く,
解析も複雑になるので,簡略化をしてサブピクセル解析を行うこととした.
)1(C の極大値はほとんどの場合 )0()0(
optxx 上に現れる.この性質を利用すると,1
次解析の画素単位およびサブピクセル解析は,Fig.3.4 で示した 1 次解析用相関領域全
体ではなく,その中心 ),()0()0(
optopt yx 上のみを対象としても大きな障害にはならない.
Fig.3.4から ),()0()0(
optopt yx の値のみを抽出し,配列したのが Fig.3.7(c)である.Fig.3.7(c)
は ),( )1()1( yx 平面に)1(
C を配列したもので,)1(
C を求める経路は全て 0 次解析で求め
た ),()0()0(
optopt yx を通る.Fig.3.7(c)では,図中央で)1(
C が最も高くなるが,周囲の分布が
やや右上に偏る様子が分かる.サブピクセル解析は,0次解析と同様,Fig.3.7(c)の分布
を 2次元のガウス分布で近似し,その頂点を求めることにより実施した.
2 次解析は,0 次および 1 次の解析で得られた解 toptopt )1()0(
uuu のまわりに
),( )2()2( yx を与え,画素単位およびサブピクセルの解析を行った.ここでも 1次解析
と同様の簡略化を採用し,計算効率を上げた.
(a)
(b) (c)
Fig.3.7 Analyzed products, (a)correlation maps in time series, (b)time-averaged
correlation map, (c) simplified first-order correlation map.

- 32 -
3.2 微分型解析手法
3.2.1 計測原理
前節では,相関値の経路積分を評価指標とすることによって時空間に分布する相関
情報の極大値の集合を「場」として直接解析することが可能になった.しかし,積分型
手法をより高次の解析へと展開してゆくと,その解析過程は複雑さを増すことになる.
PIVで解析対象としている画像情報は離散情報であり,限りある情報に対する高次近似
の限界やその妥当性については議論の余地が残されている.そこで本節では,時空間で
隣り合う相関分布間の変化を微分操作により抽出して速度場の高次解析を行う手法を
開発することとする.
Fig.3.8 Schematic view of the function of DCC method.
ところで,従来の相関法では粒子画像の相関係数を求め,その最大値の位置から移
動量を求めていた.Fig.3.8 は,従来の相関法の解析過程を図示しているが,粒子像の
「移動量」が相関分布内の「位置」として与えられる.すなわち,2画像の相関を取る
操作は,「変化率」を「値」として取り出す微分操作に相当している.したがって,任
意の物理量の相関分布を計算し,その最大値を求めることにより,分布全体の微分値(移
動量)を求めることができる.これを利用して,時系列の ):,( tyxC の相関を取ると,速
度の時間変化すなわち加速度を求めることができる. 本章では,このような微分操作
を組織的に行い,流場の高次情報を求める手法の開発を行った.
Fig.3.9は,本章で開発した手法の概念図である.相関を取る過程は図中の下向き矢

- 33 -
印で表されているが,これは前述のように 2つの分布間の微分操作を示す.この操作を
粒子画像に対して行うと速度が求まり,粒子画像の相関分布 )1(iC に対して行うと加速度
が得られる.Fig.3.9 は,解析過程を階層的に表わしており,相関を取る操作は隣接す
る階層を結び付ける役割を果たしていることが分かる.したがって,粒子画像を出発点
として微分操作を順次帰納的に行うことにより,流場の高次情報を系統的に求めること
ができる.
Fig.3.9 Schematic view of the inductive flow of PIV analysis.
A
ni
ni
ni dACCC
)1(1
)1()( (3.5)
),(max, )()()(
),(
)()()( nnni
Syx
nnni yxCyx
u (3.6)
ここで, )(niC は時刻 iにおいて原画像である粒子画像に対して n回の相関を取って得
られる相関分布を示し,粒子画像を )0(iC として定義すると,(3.5)式のように一般的に記
述できる. )(niC の最大値は )1( n
iC から )1(1
n
iC への移動量を表すが,これは(3.6)式に示す
ように )0(iC の n階微分の値を与える.したがって,(3.5),(3.6)式を系統的に用いること
により,速度場の高次情報を求めることができる.

- 34 -
3.2.2 微分型アルゴリズム
本アルゴリズムの画像解析は,基本的には相関値を求める作業であるが,Fig.3.10
に示すように, 1n 次の相関分布のうち )1( niC に相関領域 Aを設定し, )1(
1
n
iC の候補領
域 'A との間で(3.5)式の計算を行う.相関領域は )1( niC の最大値の周りに比較的小さい領
域を設定する.そして,探査領域 S 内で相関領域と候補領域の相対位置 ),( )()( nn yx を
変化させ, ),( )()()( nnni yxC の分布を求める.
Fig.3.10 Definitions of the parameters in correlation procedure.
(a)
(b)
(c) (d)
Fig.3.11 Correlation maps obtained in inductive procedure. (a) 1st-order time series
maps, (b) 2nd-order time series maps, (c) 1st -order accumulated map, (d) 2nd-order
accumlated map
Fig.3.11は,計測過程で得られる相関分布の例である. Fig.3.11 (a),(b)は,各時刻
で得られた 1 次と 2 次の相関分布である.Fig.3.11 (a)における各時刻の最大値は速度

- 35 -
を与え,5時刻の間にこの位置が僅かに左右に揺れているが,ほぼ同じ位置に存在して
いる.Fig.3.11(b)は,速度の時間変化に相当するが,4時刻間で最大値は大きく移動ぜ
ず,最大値周辺の値が僅かに変動するにとどまっている.
Fig.3.11(a),(b)の分布は各時刻での解析も可能だが,本研究では多時刻で一括解析を
行う方法をとった.具体的には,(3.7)式に示すように,ある区間で相関係数 )(niC を積分
し,この積分値 )(nC の最大値から対象区間における平均移動量を求めた.Fig.3.11(c),(d)
に, )1(C と )2(C の計算例を示す.これらの最大値から速度および t /u が求まるが,こ
の計算過程は積分型手法の 0次解析に相当しており,多時刻解析での優位性が考えられ
る.
k
i
ny
nx
niC
ny
nx
nC
0
))(
,)(
()(
))(
,)(
()(
(3.7)
上記の解析は,画素単位で t /, uu を求める方法であったが,一般的にはこれに加え
てサブピクセル精度の解析も行う必要がある.3.2.1 節で述べたように,本手法は解析
の次数によらず同一の方法が用いられており,その方法は従来の相関法とまったく同じ
である.したがって,サブピクセル解析には,過去に開発された手法をそのまま適用で
きるが,ここでは微小量検出に有利な時空間微分法[27][29]を適用した.
0)1(
)()1(
)()1(
y
Cv
x
Cu
t
C nn
sub
nn
sub
n
(3.8)
y
C
t
C
x
C
t
C
v
u
y
C
y
C
x
C
y
C
x
C
x
C
nn
nn
ns u b
ns u b
nnn
nnn
)1()1(
)1()1(
)(
)(
2)1()1()1(
)1()1(2
)1(
(3.9)
時空間微分法では,n次の解析には )1( niC の移動量検出に立ち戻り, )1( n
iC の時空間
勾配を求め,(3.8)式の支配方程式を立てる.(3.8)式は画像空間でも時間区間内でも求め
られ,連立方程式の解法には最小二乗法を用いる.結果的には,(3.9)式に示す 1次の連
立方程式を解くことにより, )()(,
nsub
nsub vu が求まる.ただし,画素単位の移動量は既に得ら
れているので,この移動量を除いて, )()()( nsub
npix
nuuu で表されるうちの )(n
subu のみの解
析を行う.

- 36 -
3.3 高次解析手法の性能評価
3.3.1 流場の高次解析に基づく新手法の有用性の検証
本節では,VSJ 標準画像#301[32]を用いてアルゴリズムの性能評価を行った結果を
述べる.VSJ 標準画像は,数値流体解析によって得られた流場情報を基に人工的に生
成された画像であり,PIVアルゴリズム性能の定量的評価に用いられてきた.画像生成
の基になった流場は,ノズルからの噴流が壁面に垂直に衝突する流場であり,本論文で
用いた#301 はノズル直下領域の計算結果を粒子画像として可視化したものである.こ
の流場は,剪断層から間欠的に生成される渦が流下する様子を時系列で捉えたものであ
る.画像解析には )pixel(1717 のやや小さい相関領域を採用したが,相関領域の空間的
なオーバーラップ比を 50%にとるなど,その他の主要緒元は一般的な値を用いている.
Fig.3.12に,原画像および積分型手法による解析結果の一例を示す.(a-1)~(a-3)は
原画像の一例であり,連続する三枚の画像を合成して表示した.計算アルゴリズムでは
1時刻ずつ画像を読み込んでそれぞれ PIV解析したが,Fig.3.12においては粒子像の変
動を静止画で表現するため,合成画像を示している.ここで示した画像は 145 時刻
(interval)に渡る原画像のうちの 115,110,105t の場合であり,連続した流場の変化を捉
えることができる.また,いずれの画像においても,図右側の領域に流速の大きな領域
があり,図左側の低流速域との間で剪断層が形成されていることが分かる.
この画像を解析して得られた速度場と渦度場を,Fig.3.12(b-1)-(b-3)に示す.これら
の図において渦度は赤青の濃淡で示されており,赤は時計回り,青は反時計回りの渦度
を示している.Fig.3.12(b-1)では右上隅に速度の大きい領域が現れ,この領域が時間経
過とともに下方へ流下している様子が Fig.3.12(b-2),(b-3)から確かめられる.さらに,
剪断層を形成しているであろう領域では,時計回りの強い渦が発生しているが,渦度の
分布状況から時計回りの渦が間欠的に発生し,列を成していることが分かる.
ところで,本手法では流速と同時に流速の時空間勾配を求めることができる.この
微分情報を用いると,流場の運動量変化を解析することが可能となる.(3.10)式で示さ
れる速度の実質微分は,Navier-Stokes方程式における慣性項に相当し,流体に作用す
る合力と釣り合う物理量である.
Y
vX
utDt
D
uuuu (3.10)

- 37 -
このような物理量が精度よく求められるようになると,流体現象を定量的かつ力学
的に分析することが可能になる.Fig.3.12(c-1)-(c-3)に,(3.10)式で得られた運動量変化
の空間分布を示す.Fig.3.12 (c-1)-(c-3)では,運動量変化が剪断層内で顕著であり,そ
の変化は間欠的に生成される渦の右側面で発生し,噴流内部に向かっていることが分か
る.この領域において,運動量変化の原因としては粘性作用より圧力勾配が優勢である
と考えると,流速の大きな噴流中心部が低圧部となって負の圧力勾配を生じ,このよう
な運動量変化が生じているものと解釈できる.このような流体力学的な解析は,従来の
PIV解析で求められた速度場の差分を用いて行うことも可能であるが,本手法では相関
情報を系統的に解析しているため,より信頼性の高い計測が可能であると考えられる.
(a-1) (b-1) (c-1)
(a-2) (b-2) (c-2)
(a-3) (b-3) (c-3)
Fig.3.12 Analyzed flow field information. (a-*) superposed original PIV images,
(b-*)velocity vectors and vorticities, (c-*)momentum flux vectors, (*-1,2,3)t=105,110,115

- 38 -
3.3.2 人工画像を用いた精度評価
本節では,標準画像の原データを用いて算出される誤差に基づいて,本アルゴリズ
ムの性能評価を定量的に行った結果について述べる.性能比較は,(A)従来の 2 時刻画
像を用いる一般的な直接相互相関法,(B)(A)の結果の時間平均値,(C)本章で提案した
積分型および(D)微分型の 4 手法で行った.誤差の算出には標準画像の原データを用い
るが,(B)~(D)の手法に用いる原データのうち第 3時刻と第 4時刻の速度を平均し,平
均値を真値として使用した.また,(A)では 6 時刻のうち第 3 時刻と第 4 時刻の画像デ
ータを用いて解析を行い,(B)~(D)で用いたものと同じ真値と比較し,誤差を求めた.
3手法のうち(A)の従来型相関法が 2時刻の情報のみを使用しているのに対して,(B)~
(D)は 6時刻の情報を使用しているため,時間解像度の違いを考慮せずに単純に(A)と(B)
~(D)の結果を比較することは必ずしも妥当でない.しかし,粒子画像の解析に用いる
情報量を増やすことによって得られる利点の検証や妥当性の確認,さらに高次解析を行
うことによる解像度の改善の可能性が予想されるため,これら 4手法の比較を行うこと
とした.
評価対象は速度および速度の時間勾配とした.本章で提案した手法は,速度の空間
勾配を速度とは独立して計測することが可能であるが,ここでは評価の対象にはしてい
ない.これは,本節の解析で使用した相関領域サイズが 17×17pixelとなっているので,
この条件では相関分布群の空間解像度が時間方向に比べて低く,速度の空間勾配に対し
て十分な精度の確保が難しかったことが主要因である.これよりも小さい相関領域を用
いて空間解像度を向上することも考えられるが,本来は時空間領域で相関領域サイズへ
の依存性・最適化を検討すべきである.本章の目的は新手法の開発であり,まずは基本
的な性能を把握することが重要であるため,ここではこのような影響の詳細は取り扱わ
ないことにした.ただし,相関分布群に対する計算アルゴリズムとしては時間と空間の
速度勾配で同一の処理を行なっているため,基本的には両者は同様の特性を示すと考え
られる.
Table 3.1 に,誤差解析結果の統計的比較を示す. , は,それぞれ誤差の平均値
および標準偏差を示す. Table 3.1より,速度および速度勾配のいずれの解析において
も,平均誤差は積分型では従来型相関法より約 20%減少したことが分かる.また,同
じ情報量を用いる時間平均値と積分型では,平均誤差と標準偏差はともに同じ程度にな
ることが分かる.微分型は,積分型と同じく 6時刻の画像情報を用いており,速度の解

- 39 -
析においては同一の処理過程をとることから,等しい統計値を示している.ただし,速
度勾配の解析においては,3.3.2 節で示した時空間微分法をサブピクセル解析に使用し
た.微分型による速度勾配の解析結果は,積分型とほぼ同程度の精度で解析可能であっ
た.ここで,誤差の出現頻度を誤差の大きさで整理してヒストグラムで表わすと
Fig.3.13のようになる.Fig.3.13には,Table 3.1で示した平均誤差と平均値から だ
け離れた位置を示している.積分型および微分型手法と時間平均値では, , とも両
者に大きな差は見られなかったため,Fig.3.13 では両者の平均値と偏差を代表して
6 , 6 と表わし,従来型のそれを 2 , 2 とするとともに便宜的に表記している.
Table 3.1 Statistical index of measurement error.
Conventional
method
Temporal
mean value
Integral
method
Differential
Method
u 0.125 0.169 0.107 0.112 0.109 0.106 0.109 0.106
t /u 0.071 0.110 0.046 0.055 0.050 0.050 0.056 0.052
【unit: pixel】
Fig.3.13(a)は,速度計測結果の比較を示す.4 手法のヒストグラムのいずれにおい
ても 0.05pixel付近で発生頻度が最大となっているが,誤差が 0.1pixelより大きい領域
では従来型相関法の発生頻度が他の 2手法よりも高くなる傾向にあり,従来型では比較
的大きな誤差が発生しやすいことが分かる.また,積分型,微分型手法および時間平均
値のヒストグラムは,ほぼ同じ傾向を示しているが,誤差が 0.05 pixelより小さい領域
において積分・微分型手法の方が発生頻度が低い傾向を示す.平均誤差の差は 20%程
度であったが,Fig.3.13 に示すように の範囲を比較すると,6 時刻の情報を用い
た解析結果は,従来型に比べて約 3分の 2の範囲に収まっており,誤差が効率的に低減
されている.
Fig.3.13(b)は,速度勾配の解析誤差についてのヒストグラムである.図から,誤差
の大きい領域で従来型の頻度が他よりも大きい傾向は,速度の解析と同様であった.し
かし,平均誤差 '2 および '6 は速度の場合の半分程度になり,ばらつきの指標 '' 22
および '' 66 は全ての手法で速度の場合よりも 0.1 程度小さくなった.また,従来型
と他 3 手法の頻度が入れ替わる点も 0.05 となっていることから,速度勾配の解析では

- 40 -
速度の解析誤差よりも全体的に誤差が小さくなる傾向にあった.また,分布頂点の位置
は従来型で約 0.04,他 2手法では約 0.02となり,上で述べたガウス近似の精度限界を
超える点に現れた.
(a)
6 2 22 66
Error(pixel)
Error appearance rate (%)
0
5
10
15
20
0 0.1 0.2 0.3 0.4 0.5
Differential method
Integral method
Temporal mean value
Instanteneous value
(b)
'' 22
'' 66 '6
'2
Error(pixel)
Error appearance rate (%)
0
10
20
30
40
50
0 0.1 0.2 0.3 0.4 0.5
Differential method
Integral method
Temporal mean value
Instanteneous value
Fig.3.13 Comparison of measurement error between the present method and
conventional methods. (a) velocity, (b)acceleration
Fig.3.14 は,本章で開発した中でも積分型に着目し,相関領域サイズの変化に対す
平均誤差の推移を従来の 2手法と比較した図であり,(a),(b)はそれぞれ速度および加速
度の誤差傾向を示す.Fig.3.14 のいずれにおいても,9×9pixel 未満の領域で従来型と
時間平均値の誤差が飛躍的に増大するのに対し,積分型の誤差増加は僅かである.同じ
画像情報を用いた積分型と時間平均値に違いが見られた原因は,両手法の処理手順の違
いによるものと考えられる.時間平均は,1時刻の相関値の最大値とその上下左右の数
点の情報から速度ベクトルを求めると,その他の相関情報を棄却して時間平均操作を行
なっている.一方,積分型では,各時刻の相関情報は最大値の近傍以外でも棄却せずに

- 41 -
時間方向に積分し,その積分結果を評価するため,結果的に速度場の時間平均値より多
い相関情報を用いることができる.Fig.3.14では,積分型のこのような優位性が,利用
できる相関情報が限られたときに発揮されたものと考えられる.
(a)
(b)
Fig.3.14 Error dependency to change of template size compared with three methods.
(a) velocity, (b) acceleration
本節で行った統計解析の結果,微・積分型アルゴリズムは時間平均値と同等の精度
で速度と速度勾配を解析できることが分かった.また,速度勾配の解析における誤差減
少のメカニズムを明らかにし,積分型および微分型手法の微分解析は画像のサンプリン
グ周波数を上げることにより相対誤差を減少できる可能性があることを示した.さらに,
積分型手法においてはより小さい相関領域を用いても精度保持が可能であり,時間平均
値よりも高い空間解像度で流場を計測できることが確かめられた.このような特性は高
速度・高精細画像の解析において活かされ,微・積分型手法の高精度化ならびに流場の
高次解析法の確立に寄与できると考えられる.

- 42 -
3.4 結言
第 3 章では,高速度・高精細画像から得られる時空間相関情報に着目し,PIV 高次
解析手法の開発を試みた.3.1 節では,相関値の経路積分を評価指標とすることによっ
て,相関値の連続性を定量的に評価し,時空間の速度場を曲面として抽出する新手法を
開発し,摂動法的に低次の項から順次求めることによって計算効率の向上を図った.
また,3.2 節では,従来の画像相関法が 2 つの分布の位置を微分していることに着
目し,相関分布に相関法をさらに適用することによって,相関分布の移動すなわち速度
の変化を捉えるアルゴリズムを開発した.このアルゴリズムは,微分解析の過程におい
て従来の PIV 解析手法を帰納的に用いるため,今まで蓄積された様々な解析手法を用
いて流場の微分解析を行うことが可能になった.
3.3節では,本アルゴリズムに VSJ標準画像を適用した結果,本アルゴリズムは速
度や渦度だけではなく流場の運動量束も計測可能であることを示した.また,精度評価
の結果,積分型および微分型手法は精度劣化を生じずに,速度と速度勾配を独立に計測
可能であることを示した.特に積分型手法においては,より小さい相関領域を用いても
精度保持が可能であり,時間平均値よりも高い空間解像度で流場を計測できることが確
かめられた.これらの成果は,本手法をさらに高精度化して 2階以降の速度高次微分を
検出するための基礎となり,より高次の PIV 解析手法開発の可能性を拓くことが期待
される.

- 43 -
第4章 高精度サブピクセル解析手法の開発
本章では,従来の高精度手法として知られる時空間微分法をさらに発展させ,より
高精度のサブピクセル解析手法開発を行う.4.1節では,時空間微分法の計測原理を高
次に展開し,画像輝度微分の高次項を用いて支配方程式を記述する.これにより,解析
対象物理量は速度だけでなくその時空間勾配も含まれることとなり,多次元解析が必要
になる.また,支配方程式の高次項には速度に関する非線形項が現れるため,これに対
応する数値解法の適用も必要になる.これらの要件を勘案し,具体的アルゴリズム開発
を行うこととする.
4.2 節では,第 3 章と同様に VSJ 標準画像に新手法を適用し,従来型解析手法と性
能を比較することにより新手法の有用性を示す.また,本手法で行なう高精度化のため
の処理を要素分けて分析し,これらの要素が果たす精度向上への寄与について検証する.
4.1 高次展開型時空間微分法
4.1.1 計測原理
PIV では,流体に追随するトレーサ粒子の運動をデジタル画像に収め,画像上で粒
子像の運動を定量的に捉えることにより速度の計測を行う.画像解析の過程では,粒子
像の画像輝度と画像移動量との関係を定式化し,これを解くことにより計測間隔あたり
の画像移動量すなわち速度を求めている.f を可視化画像における輝度分布としたとき,
時間経過とともに f が変化・移動する様子を概念的に表すと,第 2章 Fig.2.1に示した
ようになっている[27].
Fig.2.1 において, f 上のある一点に着目すると,この点は分布の移動に伴って撮像
間隔 t の間に YX , 離れた点に運ばれる.ここで,f が時空間領域で微分可能であり,
YX , は微小と見なせるものとする.さらに,輝度変化に照明勾配が与える影響は小
さいと仮定すると,着目する像の輝度値は移動前後で変化しないため,輝度分布の変化
を表す支配方程式は,速度 vu, を用いて(4.1)式に表すことができる[28][29].
0
Y
fv
X
fu
t
f (4.1)
(4.1)式は f に関する移流方程式であり, f 上のある着目点において輝度の実質微分

- 44 -
が 0となる条件を与えている.PIV計測における解析対象変数は速度 vu, であるが,既
知の情報は離散的に与えられる輝度分布 f のみであり,輝度勾配が直接与えられるわけ
ではない.そこで,従来は(4.1)式を離散化し, f に基づく差分近似によって輝度勾配を
推定した上で(4.1)式を解き,速度場 ),( vu を求めてきた.
従来は t の極限をとった微分方程式を基に計測原理の定式化が行われてきたが,本
章では f の高次項が輝度変化に与える影響を考慮して,有限差分式としての定式化を行
なうこととした.ここで, f が時空間で連続かつ平滑であるとして,改めて f を
YXt ,, でテイラー展開すると,(4.2)式に示すようになる.(4.2)式右辺の輝度や輝度
勾配およびその曲率などは ),,( 000 YXt において定義される微係数である.
)(
2
1
),,(
),,(
3222
2
2
22
2
22
2
2
000
000
otYtY
fYX
YX
fXt
Xt
f
YY
fX
X
ft
t
f
YY
fX
X
ft
t
f
YXtf
YYXXttf
(4.2)
ところで,画像移動量 YX , をベクトル形式で ),( YX x と表記するとき, x は
f に乗って移動する点 Pの速度 )(),( tYtX ppu の時間積分で(4.3)式のように表すことが
できる.
)(
2
1
)(),(
3
2000
000
0
0
o
tY
vX
ut
t
dttYtX
tttttt
tt
t pp
uuuu
ux
(4.3)
(4.3)式一行目は速度の時間積分により移動距離 x が求められることを表している
が,この速度を 0tt まわりでテイラー展開して表記すると,(4.3)式 2行目のように 0tt
における速度 ),( 000 vuu とそこでの速度勾配を用いて記述できる.(4.3)式を(4.2)式
YX , に代入すると,(4.4)式を得る.

- 45 -
)(
2
1
2
1
2
1
),,(),,(
3
200
200
22
0
2
00
2
0
2
2
2202
2202
2
00
000000
o
tY
vv
X
vu
t
v
Y
ft
Y
uv
X
uu
t
u
X
f
ttY
fv
YX
fvu
Xt
fu
tY
fv
X
fu
t
f
tY
fv
X
fu
t
f
YXtfYYXXttf
(4.4)
(4.4)式は,右辺第 0 次項の ),,( 000 YXtf を左辺に移項し,右辺をオーダー毎に t で
整理したものである.ここで,(4.4)式右辺に現れる輝度および速度の微係数は,
),,( 000 YXt で定義される値を示している.(4.4)式において, )(o の項は(4.1)式と同様に
輝度勾配と速度の積で表されているが, )( 2o の項は輝度の曲率と速度の積だけでなく,
輝度勾配と速度勾配の積も現れることになる.(4.4)式は,(4.1)式と同様に照明光強度お
よびトレーサの散乱特性が輝度変化に与える影響は小さいとして,右辺が 0となる条件
が与えられている.
(4.4)式は )( 3o 以下の項も含めた無限級数となり,このような観点で従来の支配方
程式を考えると,輝度変化を支配方程式で近似する際に生じる残差をどこまで許容する
かが問題となっていたことが分かる.無限級数表現に対して,現実的には適当な次数ま
での高次項を採用して残差を実用的な範囲に留めることを目指すが,本論文では高次手
法の基本原理を確かめるため,従来の手法に )( 2o の項を加えた計測の支配方程式を構
築することとした.
(4.4)式は, t の大きさにもよるが )(o と )( 2o が相殺して成立する可能性も考えら
れる.本来であれば,各オーダーの項がそれぞれ取る値や,量子化誤差や画像ノイズと
いった外乱要因との相対関係を勘案し,最適な解の条件を定める必要がある.しかし,
ここでは現実的な解法構築のため,オーダー毎に釣り合ってそれぞれが同時に 0になる
ものと仮定し, )(o については従来の(4.1)式を用い, )( 2o については(4.5)式を新たに
導入して,これらの連立方程式を本手法の支配方程式として用いることとした.

- 46 -
02
1
2
1
2
1
222
2
22
2
22
2
2
Y
vv
X
vu
t
v
Y
f
Y
uv
X
uu
t
u
X
f
tY
fv
YX
fuv
Xt
fu
Y
fv
X
fu
t
f
(4.5)
(4.5)式のような高次項を速度場の評価に取り入れることにより,支配方程式の定式
化の段階から有限差分空間でのデータに対応できる関係式の記述を可能としている.
(4.1),(4.5)式における未知数は速度とその時空間勾配を合わせた 8 個であり,(4.5)式に
は 2u やuvといった非線形項が含まれていることから,これを考慮して解法を構築する
必要がある.
4.1.2 高次展開アルゴリズム
方程式の解法
前節で示した(4.1),(4.5)式は,画像上の一点で成立する方程式であり,8個の未知数
を含むこれらの方程式を解くためには,少なくとも独立な 8点で連立方程式を立てる必
要がある.ここでは,相関法のピクセル解析において用いられる相関領域と同様の検査
領域を使用し,この中で最小二乗法を適用して解を求めることにした.最小二乗法で用
いる評価関数には(4.6)式に示す評価関数 S を用いることにした.
22
21 RRS (4.6)
ここで, 21,RR は(4.1),(4.5)式における残差を示す.(4.1),(4.5)式は,解の条件として
は各々独立に与えられているが,これらを組み合わせた(4.4)式右辺が 0となることが本
来の計測原理である.本手法では,(4.1),(4.5)式の連立方程式を支配方程式としている
ことから,これらを同時に満たす解を求めてゆく.また, 21,RR がそれぞれ異なるオー
ダーにおける値であることを考えると,微小パラメターを t に対応した感度補正を施
すことも考えられる.しかし,本論文では基本的な計測原理の検証が主目的であり,数
値解析手法の吟味は今後の検討課題とし,便宜的に 21,RR を同等に扱って計算を行なう
ことにした.ここで,未知数を ),,,,,,,( YYXXtt vuvuvuvuz ( vu, の添え字はその変数に
よる偏微分を示す)とおくと,Sが最小値を取るための必要条件は(4.7)式で与えられる.

- 47 -
)8,,2,1(,0
i
z
S
i
(4.7)
1R のみを用いていた従来の時空間微分法では,(4.7)式は連立 1 次方程式[27][29]と
なり,容易に解を求めることができた.しかし,本手法では 2R に 2u やuvといった非線
形項が含まれるため,(4.7)式は非線形方程式を含んだ連立方程式となる.そこで,本手
法では非線形方程式に対する解法の一つであるNewton法を適用し,解を求めることに
した.
)()()1( nnnzzz (4.8)
)()(
)(2 n
i
n
n
ji z
S
zz
S
z (4.9)
(4.8),(4.9)式は本アルゴリズムに適用した反復式である.(4.8)式に示すように,
)1( n 回目の反復解 )1( nz は n回目の解 )(n
z と修正ベクトル )(nz の和で表され, )(n
z は
(4.9)式によって算出される.(4.9)式左辺は, Sの二階偏微分行列と )(nz の積となる.
0,21
v
S
u
SRS
)0,0,0,0,0,0,,( )0()0()0( vuz
2
2
2
1 RRS
)(
)(
)(2 n
i
n
n
ji z
S
zz
S
z
Converge?
Calculate correction vector
Calculate evaluation function
Initialize vector data
Calculate initial value
Update solution
End
Start
1 nn
0)( nz
Yes
No
(A)
(B)
(C))()()1( nnn
zzz
Fig.4.1 Flow chart of present algorithm.

- 48 -
Fig.4.1 は,提案するアルゴリズムのフローチャートである.本アルゴリズムでは,
まず(A)において反復の初期値 )0(z を定める.ここでは, vu, については(4.1)式のみを適
用した解を求め,速度勾配は全て 0とした.(B)の過程では,(A)で求めた )0(z を(4.6)式
に代入し,(4.9)式を計算して修正ベクトル )(nz を得る.さらに,(C)において )(n
z の
ノルムを用い,収束判定を行う. )(nz が大きい場合には,(4.8)式に従って解 )1( n
z を
更新して(B)に戻り, )(kz が十分小さくなったところで計算を終了する.
このような反復計算は,面外速度成分による粒子像の消失や画像ノイズの影響によ
り,解が一意に定まらず,計算が終了しないことが考えられる.ここでは,反復回数に
上限を与え,制限内の反復回数で解が収束しない場合には警告を出して対処している.
Definition Point
Velocity Gradients
Interrogation Area
Fig.4.2 Schematic view of velocity gradients inside interrogation area.
Fig.4.2は,検査領域と速度勾配の影響を模式的に表した図である.本手法では,検
査領域を画像上に設定し,検査領域内の各々の点で(4.1),(4.5)式を立てて処理を進める.
ここで,解析対象とする流場が一様流でない場合,検査領域内で速度勾配が生じる.
(4.5)式の支配方程式において速度勾配を考慮に入れて定式化していることから,このよ
うな速度勾配を解法の中に組入れなければ,計測原理と解法の整合性を確保できない.
そこで,4.1.1節で述べた支配方程式の定式化と同様に,検査領域内の速度を(4.10)式の
ようにテイラー展開で表して用いることにした.
)(ˆˆˆ
)(ˆˆˆ
20
20
oYy
vX
X
vt
t
vvv
oYy
uX
X
ut
t
uuu
(4.10)
(4.10)式は検査領域中心まわりの展開式であり,(4.10)式に現れる速度およびその時
空間勾配は,領域内の平均的な値を示している.また, YXt ˆ,ˆ,ˆ は時空間で定義され
る検査領域内で連立する方程式において,各々の定義点の検査領域中央に対する相対位

- 49 -
置を表している.これは,連立する方程式群に対し,定義点の相対位置と速度勾配に応
じて変化する解を仮定することを意味している.(4.10)式を(4.1),(4.5)式に代入すると,
検査領域における拘束条件の連立方程式を得る.(4.5)式においては )( 3o や )( 4o の項
まで方程式内に現れることになるが,これらは微小項として整理し, )( 2o までの項の
みを用いてアルゴリズムの構築を行なった.
方程式の離散化
ここまでの議論により新手法の原理と解法が示されたが,デジタル画像を解析の対
象とする PIV 計測では,方程式の離散化が必要である.ここでは,計測アルゴリズム
の高精度化により微小な計測誤差が問題となるため,方程式の離散化法についても厳密
な検討が必要となる.離散化法の評価には誤差評価が直接できる人工画像を用いるが,
ここでは Fig.4.3に示すような単一粒子像が一定速度で移動する画像を用いた.これは,
画像変形や粒子像の消失といった方程式の離散化とは関係のない誤差要因を排除し,離
散化式を純粋に評価するためである.
(a) (b) (c)
Fig.4.3 Examples of artificial single particle images.
(a) t=0, (b) t=1, (c) t=2
Fig.4.3 における粒子像の輝度分布はガウス分布に従っており,分布の標準偏差は
2.5pixel,移動速度は 0.5pixel/intervalに設定した.また,粒子の移動方向を全周に渡
って 1°刻みに変化させた画像を用いて,離散化式の角度特性の検討を行った.
Xt
Y
FD CD FD-8 CD-27
Luminancevalue
Definingpoint
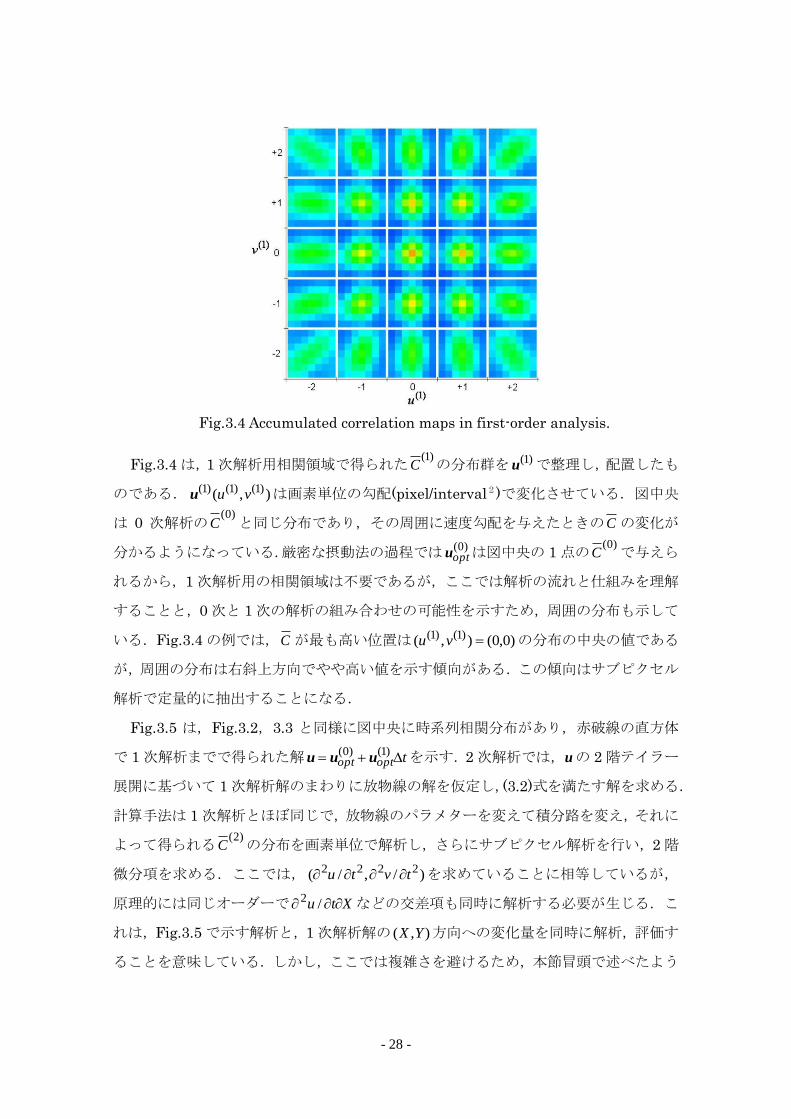
Fig.4.4 Schematic view of compared finite difference schemes.
Fig.4.4に,比較に用いた定義点や差分精度,解像度がそれぞれ異なる 4種の差分ス
- 50 -
キームの概念図を示す.図中丸印および星印は,それぞれ輝度および差分の定義点を示
す.FDは最も基本的な前進差分であり,各軸方向の輝度勾配は異なる点で定義されて
いる.一方,CD は中心差分であり,全ての差分の定義点が一致している.FD-8 は,
差分式自身は FD と同じ前進差分を用いているが,2 時刻×4 空間点の輝度情報を用い
て差分値を算出することにより,各軸方向の差分の定義点を一致させている.CD-27
は中心差分を用いるが,3 時刻×9空間点の輝度値を用いて,FD-8 のように隣接する 4
点の差分値を単純平均した上で,4つのブロックの平均値を更に平均して中央の差分値
を求めている.この結果,参照される回数の違いから,CD-27では領域中央を 4,上下
左右の隣接点を 2,対角上を 1とする重み付き平均を行なっていることに相当する.こ
れら 4つの差分スキームについて解析精度を比較すると,Fig.4.5に示すようになる.
Fig.4.5 Comparison of the performances of finite difference schemes.
(a) FD, (b) CD, (c) FD-8, (d) CD-27
Fig.4.5において,赤線は粒子移動ベクトルの終点を示し,黒線は画像解析の結果を
示す.Fig.4.5(a)に示す FD では,正円を描く真値に対して解析値は異なる傾向を示し,
距離と角度の双方に誤差が生じていた.一方,Fig.4.5(b)に示す CD では解析値には角

- 51 -
度特性による偏りは発生せず,移動量が一様に 5.8%程度の誤差を生じる結果となった.
FD-8と CD-27の解析結果でも同様に一様な角度特性を得ることができ,移動量の誤差
は FD-8,CD-27の順に減少した.これらの結果を総合すると,差分の定義点を一致さ
せることにより均一な角度特性を得ることができ,時空間微分法においてピークロッキ
ングを防ぐためにはこのような差分スキームを用いる必要があることが分かる.
ここで,同じ中心差分に基づく手法でも,CDでは速度を過大に,CD-27では過小に
評価しており,それぞれ逆の傾向を示している.差分スキームにおける平均操作が原因
になっているとも考えられるが,メカニズムの解明には至っていない.今後,検討を進
め,計測精度向上に反映させたい.
Table 4.1 Comparison of mean absolute error between four difference schemes.
FD CD FD-8 CD-27
Mean error 0.0366 0.0292 0.0198 0.0135
[unit: pixel/interval]
これらの誤差評価結果を平均値でまとめると,Table 4.1に示すようになる.Fig.4.5
で観察された誤差変化が統計値として示されているが,特に CD-27 では 0.0135pixel
まで誤差が減少し,実用的な範囲では差分による誤差をほぼ排除できている.
ところで,本章で提案する手法では支配方程式に 2 階微分の項を含んでいるため,
差分スキーム内で各軸方向にそれぞれ最低 3点の輝度値が必要になる.1階微分と 2階
微分で異なる差分スキームを用いることも考えられるが,ここでは 2次精度を持ち,同
じスキームで 2階微分まで求められる CD-27を採用することとした.

- 52 -
4.2 高精度手法の性能評価
4.2.1 従来型手法に対する性能向上
新アルゴリズムについて,3章同様 VSJ標準画像#301[32]に本手法を適用して性能
評価を行った.標準画像#301 はノイズを含まない人工画像であり,面外速度成分は平
均 15%である.また,粒子像は理想的なガウス分布で与えられており,平均粒子径は
5.0pixel,粒子径偏差は 1.4pixelとなっている.この画像は,剪断によって大きく変形
する流場や 3 次元性の高い流場を含み,時系列の非定常流場を用いていることから,
PIVの様々な局面を想定した総合的な性能評価が可能である.ここでは,サブピクセル
解析手法の比較として,本手法(STD-HE),従来型(STD),相関分布にガウス分布近似
を施す方法(Gauss)を対象とした.いずれの手法においても連続する 3 時刻の画像を使
用して第 2時刻の速度場を求め,誤差評価の対象とした.このとき,Gaussでは,第 1・
2 時刻目と第 2・3 時刻目の画像相関から得られる相関分布同士を加算平均し,その最
大値位置を用いて第 2時刻の速度場を求めた.画像解析は画素単位の解析結果を基にサ
ブピクセル解析を行うが,ここでは最も一般的な直接相互相関法(DCC)を用いた.また,
DCC に含まれる誤差を排除してサブピクセル解析単独での性能評価を行うため,原デ
ータを用いて画素単位で画像を移動させ,サブピクセル解析を適用した結果(PIX-OFF)
についても比較を行った.ここで,検査領域サイズは 17×17pixel とし,オーバーラッ
プ率は 50%とした.また,143フレーム×26点×26点=96668の計測点で解析を行った
が,PIX-OFF,STD-HEの条件では,解の発散は僅か 10点において生じたのみであっ
た.
Table 4.2 Comparison of mean absolute errors between three methods.
Pixel analysis STD-HE STD Gauss
DCC 0.114 0.141 0.126
PIX-OFF 0.100 0.122 0.135
[unit: pixel/interval]
Table 4.2は,解析から得られた平均誤差の比較を示す. STD-HEは,DCC,PIX-OFF
いずれの場合でも他の2手法よりも誤差が小さいという結果が得られた.STDとGauss
は,DCC と PIX-OFF の場合で誤差の大小が逆転しているが,サブピクセル解析のみ
の性能比較(PIX-OFF)では,時空間微分法のほうが解析精度は優位であるとの結果を得

- 53 -
た.定量的な誤差比較では,STD-HEは従来法に比べて 20~30%の精度向上を果たして
いることが分かる.
0
4
8
12
0 0.05 0.1 0.15 0.2 0.25
STD-HE
STD
Gauss
Error (pixel)
Ap
pe
ara
nce
ra
te (
%)
Fig.4.6 Comparison of the error appearance to the error amount.
Fig.4.6は 3手法の誤差発生頻度を比較した図である.ここでは PIX-OFFの誤差を
解析対象としており,横軸は誤差量,縦軸は発生頻度を示している.また,ヒストグラ
ムの赤,青,白色は,それぞれ STD-HE,STD,Gaussを示す.Fig.4.6から,3手法
は全て 0.06pixel 付近で頻度が最大となっているが,0.07pixel 以下の領域において
STD-HE の頻度が最も高くなり,STD-HE がより小さな誤差発生特性を有しているこ
とが示されている.
0
0.1
0.2
0.3
0 1 2 3 4
Gauss
STD
STD-HE
Err
or
(pix
el)
Q (1/interval)
Fig.4.7 Dependency of measurement error appearance to the image deformation.
Fig.4.7は,標準画像の主要な誤差要因である流場変形が,計測誤差に与える影響を
示した図である.ここでも PIX-OFFの誤差を解析対象とし,横軸は後述の変形パラメ
ターQ を示し,縦軸はQ に対する区間平均誤差を表示した.ここで用いているQ は

- 54 -
(4.11)式で与えられる評価指標であり,伸縮 YX , ,剪断 XY ,回転 ,時間勾配 tu の
ノルムに感度補正を施したものである.(11)式の各要素については,速度の原データを
中心差分した値を使用した.感度補正値は,標準画像#301 に相関法を適用して得られ
た結果の誤差解析に基づいて決められたものであり, に対する誤差感度は XYYX ,,
よりも 2 倍高くなるとしている.これらの誤差感度の算出については,付録 B に詳細
を示した.ただし,#301 以外の画像に適用する場合の感度係数の妥当性については未
検証であることと,本文中で新たに加えた tu は感度が不明のままQに組入れているの
で,一般的に用いる場合は注意が必要である.
222224 tXYYXQ u (4.11)
Fig.4.7 では,3 手法は全て流場変形に伴って誤差が増大する傾向を示しているが,
STD-HE においては誤差増大の傾きは他よりも小さく,変形量の大きい領域での誤差
が小さくなっていることが分かる.これは,STD-HE の解析過程において速度勾配を
評価していることが有利に働いた結果であると考えられる.
Displacement (pixel)
Err
or
(pix
el)
0
0.2
0.4
0.6
0 0.2 0.4 0.6 0.8 1
STD-HE
STD
Gauss
A B C
Fig.4.8 Measurement error dependency to image displacement.
Fig.4.8は,画像移動量がサブピクセル解析精度に与える影響を検討した結果を示す.
横軸はサブピクセル解析の解析対象量を示し,縦軸は解析誤差である.誤差発生傾向の
比較は,ピクセル解析を DCC法により行った場合について行なった.したがって,サ
ブピクセル解析の解析対象移動量は 0.5pixelを超える場合が生じる.誤差の発生傾向は
Fig.4.8 に示すように,サブピクセル解析が本来解析対象としている移動量が 0.5pixel
- 55 -
以下の範囲(A 領域),0.7pixel 以上の移動量が想定外に大きい範囲(C 領域),そして両
者の中間(B領域)で異なる.
A 領域では,移動量に関わらず発生誤差は一定であり,B 領域で徐々に発生誤差は
増加し,C領域で解析対象移動量の大きさに比例して発生誤差は大きくなる.A領域の
中でも 0.25pixel 以下の解析対象量が比較的小さい領域では,Gauss,STD,STD-HE
の順で誤差発生は小さくなっており,Table 4.2 の PIX-OFF で示した傾向を示してい
る.時空間微分法の 2手法(STD,STD-HE)は,A領域後半で誤差発生量が若干増加す
る傾向にあるが,その量は僅かで,STD-HE の優位性に変わりはない.B 領域では,
Gauss と STD-HE がほぼ同等の値を示すようになり,この範囲までは関数近似する手
法の安定性が有効に働き,本章で提案する高次手法と同等の解析精度を発揮することが
分かる.一方,C 領域では,高次近似を採用した STD-HE の誤差量の増加傾向は,他
の 2手法より小さく,徐々に Gaussに対して STD-HEが優位に立つことが分かる.
総合的に見ると,STD-HEは A,B,C全ての領域で他の 2手法よりも小さい誤差発生
量は小さく抑えられ,高い解析精度の確保と画像変形や移動量に対する計測特性の改善
が図られたことが確かめられた.これは,支配方程式の展開と解法の高次展開,離散化
法の最適化といった本手法で行った高精度化の各要素がそれぞれ有効に機能した結果
であると考えられる.
4.2.2 高精度化の要素分析
以下では,STD-HEにおける高精度化の要素と精度との関係について調査した結果
について述べる.STD-HE は,計測原理の支配方程式と解法のそれぞれにおいて高次
展開を採用している.そこで,これらを要素に分解して,従来型の時空間微分法(STD)
と,STD に対して検査領域内の速度勾配を考慮して,部分的に高次解法を取り入れた
部分展開型手法(STD-PE)[33],そして本章で提案した支配方程式まで高次展開を取り
入れる高次展開手法(STD-HE)の 3つの手法の比較を行なった.また,使用する差分ス
キームは,2.3 節で述べた FD-8 と CD-27 を検討することにした.解析画像には VSJ
標準画像#301 を用い,サブピクセル解析のみの精度評価を行なえる PIX-OFF の場合
について,誤差比較を行なった.また,検査領域サイズおよびオーバーラップ率につい
ては先程までと同条件とした.

- 56 -
Table 4.3に,解析手法と差分法の違いによる平均誤差の比較を示す.Table 4.3に
おいては,全ての手法の誤差の違いは 0.01pixelのオーダーで現れていることから,計
測手法の基本的な性能は,従来の計測原理である 1R が支配的であることが分かる.し
かし,これの更なる性能向上に対しては,本論文の試みである 2R の導入や速度勾配を
考慮する解法などが貢献可能であることも同時に確かめられる.また,CD-27 を用い
た場合に着目すると,STD,STD-PE,STD-HEの順で精度が向上し,本章で提案する
高次展開手法が適切に機能していることが分かる.また,STD-PEと STD については
CD-27を用いるよりも FD-8を用いたほうが誤差が小さくなった.同一の画像情報量を
解析に用いる場合,解像度の高い FD-8ではより多くの方程式を検査領域内で立てるこ
とができ,最小二乗法における残差を圧縮可能となると考えられ,このような結果が得
られたものと推察される.
Table 4.3 Accuracy improvement from the effects of successful higher-order
expansions.
STD-HE STD-PE STD
CD-27 0.100 0.111 0.136
FD-8 0.100 0.122
[unit: pixel]
0
4
8
12
0 0.05 0.1 0.15 0.2 0.25
STD-HE, CD-27
STD-PE, FD-8
STD , FD-8
Error (pixel)
Appeara
nce r
ate
(%
)
Fig.4.9 Comparison of error appearance characteristics between the three steps of
extension.
Fig.4.9に,3つの手法の誤差発生傾向の比較を示す.比較は,それぞれの手法の中
で最も小さい誤差を示した差分スキームを用いた場合について行なった.Fig.4.9 にお

- 57 -
いて,3手法の分布頂点はいずれの場合も誤差量が 0.06pixel付近に現れた.0.12pixel
を超える領域では STDの頻度が他よりも高くなっており,STDでは比較的大きい誤差
を生じやすいことが分かる.STD-HEと STD-PEは,Table 4.3においては等しい統計
値を示しているが,両者のヒストグラムは僅かに異なる傾向を示している. D
iffe
ren
ce
of
da
ta(%
)
-1.2
-0.8
-0.4
0
0.4
0.8
1.2
0 0.25 0.5 0.75 1
Error appearance RateError momentA
B
C
Error (pixel)
Fig.4.10 Difference of error moment distribution between STD-HE and STD-PE.
ところで,Fig.4.9に示す頻度分布の重心位置は,誤差の平均値と一致する.重心位
置は,頻度分布における 1 次モーメント(頻度×誤差量)の和で表されることから,これ
に着目して STD-HE と STD-PE の誤差発生傾向の比較を行なうことにした.Fig.4.10
は,STD-HEと STD-PEの誤差発生頻度とその一次モーメントの比較を示す.ここで,
誤差発生頻度を黒線で,誤差の一次モーメントを赤線で示し,STD-HE から STD-PE
を差し引いた値で比較を行なっている.頻度分布の違いに着目すると,STD-HE は B
で示す領域で発生頻度が減少し,A,Cの領域で頻度が増加している.これに伴う誤差モ
ーメントの変化は,STD-HE が 0.1pixel 以下の領域で平均誤差を引き下げるように作
用したことが分かる.一方で,0.1~0.5pixelの領域では平均誤差を増加させる方向に作
用するため,これら 2 つの作用が相殺した結果,STD-HEと STD-PEの平均誤差が等
しい値で現れたことが分かる.
以上の結果から,本章で開発した手法は,従来のサブピクセル解析における計測値
の分解能を改善し,誤差が 1/20pixel/interval 以下の計測結果の集合を増やすことに成
功した.現状では,比較的大きな誤差の精度をかえって増加させる理由が不明であるた
め,STD-PEに対する優位性は平均誤差では示せなかったが,基本性能の向上は図るこ
とができたと考える.

- 58 -
4.3 結言
第 4章では,従来の時空間微分法を発展させ,高次項を考慮した新しい PIV解析手
法を提案するとともに,その解析精度の検証を行った.計測原理の拡張では,時空間微
分法の定式化過程で用いる輝度および速度場のテイラー展開において,高次微分項を採
用することにより,流体運動の基礎方程式に立脚して速度場を解析する新しい手法開発
の可能性を示した.また,開発した手法を VSJ 標準画像に適用して性能評価を行った
結果,従来の手法よりも高い精度確保と一部の誤差要因に対する特性改善に成功してい
ることを確かめた.開発した手法により,サブピクセル解析の基本性能の向上を図るこ
とに成功したが,今後,手法に適した画像の質や要件,サンプリング周波数などについ
て調査を進める必要があると思われる.
また,第 4 章では,反復法を用いて非線形の高次の解析を行っているが,実験画像
におけるノイズや面外速度などの阻害要因の検討は十分に行なわれていない.計測法開
発の立場からは,どのような場合に解を求めることができないか分析をして,解析性能
を吟味することが望ましいが,本論文では基本原理の開発が主眼であるので,今後の研
究での課題としたいと考える.

- 59 -
第5章 誤差分析に基づく総合的性能評価
前章までは,相関情報の時空間解析に基づく PIV高次解析を実現するための新しい
手法開発を行ってきた.このうち,積分型および微分型手法の開発はピクセル解析に対
する試みであり,高次展開型時空間微分法の開発はサブピクセル解析に関する試みであ
った.また,いずれの章で行なった性能評価においても,開発した手法により有益な成
果を得ることができた.しかし,3 章においてはサブピクセル解析を,4 章ではピクセ
ル解析を代表的なものに固定して計測誤差を求め,各々の章で開発した手法の性能評価
を行っていた.これは,ピクセル解析またはサブピクセル解析に分類される PIV 手法
のうち,同一カテゴリー内の他手法との相対的な性能を評価していたことを意味してい
る.しかし,PIVアルゴリズムの性能は,本来はピクセル解析とサブピクセル解析を組
み合わせた場合の複合的な性能で決まるものである.したがって,ピクセル解析性能と
サブピクセル解析性能の相対関係や,これらの相互影響を解明することができれば,両
者の性能を同列に取り扱うことも可能になり,より詳細な性能分析が可能になるものと
考えられる.本章では,このような考えに基づいて 3,4章で取り扱った手法の統一的評
価手法の構築を試みる.

- 60 -
5.1 アルゴリズムの基本性能
5.1.1 ピクセル解析の残差特性
本節の目的は,ピクセル解析のアルゴリズムの違いによる残差特性を明らかにする
ことである.3章で開発した積分型および微分型手法は,ピクセル解析における高次解
析手法であった.しかし,3章で行なった手法の性能評価は,サブピクセル解析を含め
た状態での複合的な性能評価に限定されていた.ピクセル解析とサブピクセル解析を分
離し,それぞれ個別に性能評価を行うと,PIV画像解析過程における解析メカニズムを
分析し,より正確に解析手法の性能を吟味することが可能になるものと思われる.そこ
で,本節では前節までと同様 VSJ標準画像#301[32]を解析し,解析値と真値の差から
ピクセル解析の残差を求めて,残差特性の分析を行なうことにする.
Fig. 5.1 Schematic diagram of present coordinate system.
Fig.5.1は,本節で行なう解析で用いる座標系を示したものである.Fig.5.1中央の
赤色の点は原点を示しており,これは,ある計測点における正解ベクトルの位置を示す.
そして,ある正解ベクトルに対応するピクセル解析値の相対位置を全ての計測点で求め,
残差特性を分析する.正解値 ),( tt yx に対するピクセル解析値 ),( mm yx の残差 ),( mm yx
は,(5.1)式で与えられる.
),(),(),( ttmmmm yxyxyx (5.1)
)()5.0int(),5.0int(),( tttttt yxyxyx (5.2)

- 61 -
また,本節では前章で用いた PIX-OFFも解析対象としており,PIX-OFFの残差
),( tt yx は,(5.2)式から得られる.また,Fig.5.1においては半径 0.5および 0.7pixel
の円を示した.これは,残差のノルムを用いて誤差解析を行った前章の解析において誤
差特性の分岐点となっていた点である.このような座標系で残差特性を整理し,手法の
違いによる残差特性を調べた結果,Fig.5.2を得た.
(a)
(b) (c)
Fig. 5.2 Distribution of residual error appearance rate in pixel analysis of velocity.
(a) PIX-OFF, (b) DCC ,(c) integral method
Fig.5.2は,Fig.5.1のような座標系を用いて解析の残差発生特性を調査した結果を
示す.ここでは,微小区間内の残差出現率を求め,これをカラーマップで表示した.

- 62 -
Fig.5.2(a)は PIX-OFFの残差 ),( tt yx の分布である. Fig.5.2(b)および Fig5.2(c)は従
来の相関法(DCC)および積分型の残差をそれぞれ示す.なお,本論文で開発した手法に
は,積分型と微分型の 2つがあるが,速度の解析においてはこれらは同一の処理を行な
っていることから,ここでは積分型に対してのみ評価を行うこととする.DCCは 2枚
の画像ペアを解析対象としているが,積分型では 6枚の画像を対象としている.
Fig.5.2(a)から,PIX-OFFでは全ての残差 tt yx , が正解値に対して 5.0 pixelの範
囲に現れ,正方形の領域内でほぼ均一に表れていることが確かめられる.ピクセル解析
の解像度は yx, 方向ともに 5.0 pixelであるので,この正方形はピクセル解析の正解画
素が存在する範囲に相当する.
また,Fig5.2(b),(c)のいずれにおいても正方形の境界付近で出現率が減少し,正方形
の外側にも残差が発生している.よって,この領域の残差をいかに減らして PIX-OFF
に近づけるかということがピクセル解析過程の最終目標であるものと理解できる.また,
3章ではノルムで残差を整理し,誤差特性を分析していた.しかし,正解画素の境界と
なるノルム rは角度に応じて 7.0~5.0 pixelまで変化しており,単純にノルムで残差を整
理しても,残差特性を一元的に表せない.そこで,本節では角度特性を踏まえて正解画
素の境界を表現し,残差特性を一元的に評価可能なパラメターを考える.
Fig. 5.3 Schematic diagram of parameter unification from canceling out the effect of
angle of residual.
Fig.5.3は,本節で行なったパラメター一元化の概要を示す.Fig.5.3は,残差を正
解画素境界との比で表すことを意味しており,(5.3)式に示す r を用いて残差特性を調べ
ることにする.Fig.5.3のように をとり, と r を用いて Fig.5.2の残差分布を微小区
間に分割し,角度補正前後の残差特性を比較する.ここで,r の大きさに応じて微小区

- 63 -
間の面積が変化するため,r を用いて残差特性を一元的に取り扱うためにはこの影響も
考慮する必要がある.そこで,残差を面積あたりの出現密度で現し, r または r と に
対する残差特性を調べると,Fig.5.4に示すようになる.
),2,1,0(,))4/3()4/1((sin
))4/1()4/1((cos
n
nnr
nnrr
i
ii
(5.3)
(a)
r
(deg)360270180900
0
5.0
1
(b)
r
(deg)360270180900
0
5.0
1
Fig.5.4 Result of parameter unification to residual distribution.
arranged by (a) r , (b) r .
Fig.5.4は,(5.3)式のようなパラメター一元化の効果を示したものである.これらは,
Fig.5.2(c)で示した積分型の残差をノルム r または r と角度 で整理して,ある点の残差
出現率を面積あたりの密度で表したものである.出現密度についてはカラーマップで表
示した.Fig.5.4(a)は,Fig.4.9同様ノルム r を用いて残差を整理したものである.単純
- 64 -
にノルムで残差を整理した場合,Fig.5.2(a)のように正解画素境界が正方形となってい
ることが残差特性に影響を与える.これにより,Fig.5.4(a)では,残差出現の減衰が見
られる出現密度 30程度の領域が, に応じて 7.0~5.0r の範囲で周期的に変動してい
る.一方,r を用いて残差出現密度を整理した Fig.5.4(b)では, の変動に関わらず r に
対して一様な残差特性を得られるようになる.これにより,残差を r で整理して,面積
あたりの出現密度で現すと残差特性を一元的に表せることが分かる.そこで,Fig.5.4(b)
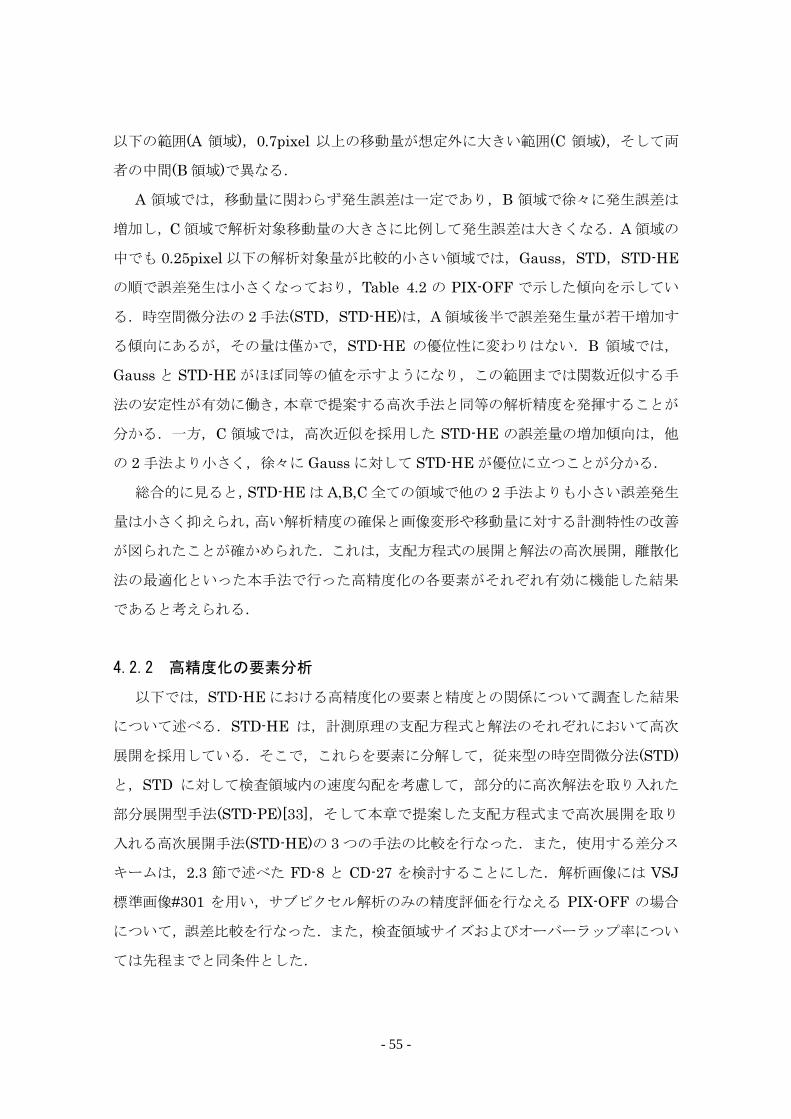
のような出現密度分布を 方向に平均し,詳細な残差特性を分析することにする.
(a)
(b)
Fig.5.5 Error appearance characteristics in pixel analysis as a function of
non-dimensional residual.(a) measurement result, (b) difference between integral
and conventional method
Fig.5.5 はピクセル解析における残差発生特性の比較を示す.Fig.5.5(a)は,横軸に
残差比 ir ,縦軸に残差密度 ih をとって残差発生特性を示したものであり,黒,緑,赤色
の曲線はそれぞれ PIX-OFF,従来型,積分型を示す.Fig.5.5(a)から,PIX-OFF が矩

- 65 -
形の分布を示すのに対し,従来型および積分型では 75.0~25.0r にかけて徐々に出現
率が減衰する傾向を示す.Fig.5.5(a)においては,積分型と従来型は同様の分布形状を
しており,その差を分析することは困難である.そこで,両者の差をとって Fig.5.5(b)
に示した.Fig.5.5(b)において,縦軸は積分型の出現率から従来型を差し引いた値を示
し,正の値はその区間において積分型の出現率が高いことを意味している.Fig.5.5(b)
から,積分型が 0.5 以上の残差を改善し,0.5 以下の領域の発生率を増加させているこ
とが分かる.
以上の結果から,残差の発生が角度特性を持つことを明らかにし,画素中心からの
距離と発生率を比で表すことによって,ピクセル解析の誤差を系統的に分析できること
を示した.また,積分型はピクセル解析において,正解値近傍で発生する微小な誤差を
改善していることが分かった.このような積分型と従来型の違いは,3章においては示
すことができなかったが,本節で行なった分析により明らかになった.
5.1.2 サブピクセル解析の誤差特性
前節では,ピクセル解析単独での性能評価を行なったが,本節ではサブピクセル解
析の誤差特性を改めて検証し,前節の結果と組み合わせて分析する.サブピクセル解析
単独での性能評価は 4章においても行なったが,前節で見られた残差の角度特性は考慮
されていなかった.本節では,角度特性を考慮して誤差分析を行うとともに,サブピク
セル解析とピクセル解析の相互影響を考慮した総合的性能評価のための準備を行なう.
Fig.5.6 Fundamental error characteristics of sub-pixel analysis as a function of
non-dimensional residual.

- 66 -
Fig.5.6は,解析対象移動量に対するサブピクセル解析本来の性能を示す.ピクセル
解析には PIX-OFF を用い,横軸に前節で定義した残差比 ir ,縦軸に区間平均誤差をと
って誤差特性を示した.また,Fig.5.6 における緑,黒,赤線は,それぞれ 4.2 節で定
義した Gauss,STD,STD-HE に対応している.Fig.5.6 から, r に対して STD は僅
かに誤差依存性を示しているが,Gauss と STD-HE はほぼ一定値を取っていることが
分かる.よって,ピクセル解析の残差が Fig.5.2(a)のような PIX-OFF の領域内に収ま
れば,サブピクセル解析は 0.1pixel程度の精度で速度を解析可能な性能を有しているこ
とが,改めて確かめられる.
Fig.5.7 に,DCC 法と組み合わせた場合のサブピクセル解析誤差特性を示す.これ
は,Fig.4.8の横軸を残差比 r に置き換えることにより,Fig.5.2で見られた角度特性の
影響を消去したものである.Fig.4.8では,残差が 0.5pixelを超える B領域において比
較的緩やかに誤差が増加していたが,Fig.5.7 では 5.0r を境に誤差特性が顕著に変化
することが分かる. 5.0r の領域では,Fig.5.5 同様いずれの手法もほぼ一様な誤差特
性を示している.しかし, 5.0r の領域では,いずれの手法においても直線的に誤差が
増加する傾向を示す.また,手法ごとの差は 5.0r の領域では主に Fig.5.5のように曲
線の高さの差となって現れるのに対し, 5.0r の領域では曲線の傾きが各々異なってい
る.そこで,これらの誤差特性を 5.0r の前後で分離し,誤差分布を用いて検討するこ
とにした.
Fig.5.7 Overall error characteristic curve of sub-pixel analysis as a function of r .
Fig.5.8は,サブピクセル解析における誤差分布と,それに対する回帰分析の結果で
ある.Fig.5.8 では, 5.0r の前後を分離して,それぞれの領域に対して回帰分析を行

- 67 -
なった.Fig.5.8 の横軸は残差比 r ,縦軸は誤差量に対応している.また,Fig.5.8(a-*)
は Gauss,(b-*)は STD,(c-*)は STD-HE の誤差分布をそれぞれ示し,(*-1)は 5.0r ,
(*-2)は 5.0r の領域を示す.Fig.5.8 において,ある r に対する誤差発生は,ガウス分
布のような対象性を持たず,偏りを持った分布を形成している.この分布の評価法とし
ては,3.3 節で行なった平均値と標準偏差を組み合わせる方法や,中央値,四分位点な
どの統計量を用いる方法も考えられる.しかし,ここでは r と誤差量の大局的な関係を
調べるため,直線回帰に基づく分析を行なうことにした.
5.0r の領域に着目すると,Gauss では r に対してほとんど相関は見られないが,
STDおよび STD-HEでは僅かに傾きを持っていることが分かる.ただし,STD-HEで
は回帰直線の切片,傾きともに STD よりも減少しており,基本性能の向上が確かめら
れる.画像移動量に対する gaussと STDの誤差依存性の違いは,一様流を想定した人
工画像による誤差分析においても同様の結果が報告されている[34].これは,STD のよ
うな手法では輝度の時間勾配の差分近似精度が,画像移動量に応じて劣化することが主
要因であると推察され,支配方程式に 2 次の項まで導入した STD-HE では,この影響
が緩和されて回帰直線の傾きが改善した可能性も考えられる.
また, 5.0r の領域に着目すると,Gauss と STD がほぼ同程度の傾きを示してお
り,両者の違いは回帰直線の切片の差となって現れている.これに対し,STD-HE の傾
きは他の 2 手法よりも若干低くなっており,Fig.4.8 と同様の結果が得られている.ま
た,Fig.5.7 で解析対象としていなかった 1r の領域ではサンプル数が大きく減少する
ものの, 15.0 r の区間同様,誤差が r に対して直線的に増加する傾向にあることが
分かる.また,これらの傾きはいずれも 1付近の値を取っていることから,本節で比較
した手法では,この領域における残差の修正が困難であったものと思われる.

- 68 -
(a-1) (a-2)
(b-1) (b-2)
(c-1) (c-2)
Fig.5.8 Comparison of error distribution between three methods.
(a-*) Gauss, (b-*) STD, (c)-*), STD-HE, (*-1) 5.00 r , (*-2) r5.0

- 69 -
5.2 アルゴリズムの総合性能
前節までは,ピクセル解析ならびにサブピクセル解析の性能および誤差特性につい
て個別に分析を行なってきた.本節では,これらを組み合わせて用いる場合の最終的な
PIV解析誤差について評価を行なう.具体的には,残差の代表パラメター r に対する誤
差発生特性に着目し,統計的な観点から誤差発生メカニズムを考察する.さらに,この
メカニズムに基づいて PIV 手法の統計的性質に基づく誤差推定モデルを構築し,PIV
解析手法の総合性能評価を行う.
5.2.1 誤差伝播メカニズムの分析
5.1節の解析では,残差の代表パラメター r で計測値を整理することにより,ピクセ
ル解析結果を Fig.5.5のような残差密度曲線で表し,これらの計測点にサブピクセル解
析を適用して,Fig.5.8のような誤差分布を得た.Fig.5.8では, 5.0r 付近を境に r に
対する誤差特性が変化することを示したが,個々の計測点については誤差にばらつきが
生じていた.これは,面外速度成分や流場の変形,2画像間のコントラストの違いとい
った r 以外の誤差要因が存在し,これらの影響を受けて最終的な誤差発生に至るためで
ある.しかし,ここでは r 以外の誤差要因を無視できるものとし, r に対する誤差特性
を Fig.5.7のような平均的な誤差曲線を用いて表せるものと仮定する.この仮定の下で
は,Fig.5.5のような出現密度曲線に Fig.5.7のような誤差感度曲線を乗算することによ
って誤差モーメント曲線を推定可能となる.このような仮定に基づくと,r に対する統
計的性質を用いて誤差発生メカニズムを考えることが可能になり,モーメントの積分と
して与えられる平均誤差だけでなく,ピクセル解析・サブピクセル解析個々の性能と平
均誤差への寄与についても分析することができる.
(a) (b) (c) (d)
Fig.5.9 Schematic view of error communicating mechanism in PIV image analysis.

- 70 -
Fig.5.9 は,本節で考える PIV アルゴリズムの誤差伝播メカニズムを模式的に表し
たものである.このメカニズムにおいて,ピクセル解析後に残った残差は伝播システム
の入力部に相当し,Fig.5.9(a)のような帯域特性を持って入力される.これに対し,(b)
に示すサブピクセル解析が,帯域によって異なる特性を持った感度関数のように作用し,
(a),(b)間の相互影響によって(c)のような誤差モーメント曲線が出力される.例えば,
ピクセル解析において 5.0r の領域に発生した残差は,誤差感度の高い領域でのサブピ
クセル解析を誘発し,誤差モーメント増大に結びつくものと考えられる.そして,誤差
モーメントの積分として,最終的な統計値が決定されることになる.従来の解析では,
Fig.5.9(a),(b)における手法の違いと(d)の積分値の変化を用いてアルゴリズムの性能評
価を行ってきた.しかし,Fig.5.9 のように r で整理された誤差発生メカニズムを考え
ると,手法ごとの入力特性の違いや,出力特性の違いに着目して誤差評価を行なうこと
が可能になり,より詳細なアルゴリズムの性能評価が可能になる.
Fig.5.10 Comparison between measured and estimated error moment
appearance.
Fig.5.10 は,本節で考える誤差伝播モデルに基づく誤差モーメント曲線の推定につ
いて検討したものであり,解析から得られた誤差モーメント曲線と推定された曲線を比
較した.対象とする手法は DCCと Gaussを組み合わせる手法であり,解析値について
は,実際に計測された個々の誤差を r で整理し,各区間のモーメント合計値を算出した.
モーメントの積算区間は r の増加に比例して拡がるため,モーメント曲線は残差密度と
異なり 4.00 r において直線的に増加している.Fig.5.10 においては,解析値と推定
値は 0r 付近を除いてほぼ同程度の値を取っていることから,手法ごとの r に対する
統計的性質を用いて誤差推定が可能であるものと考えられる.

- 71 -
誤差特性モデルのパラメター表現
Fig.5.10 で行なった誤差推定では,ピクセル解析の残差出現率やサブピクセル解析
の誤差特性については計測された統計値を直接用いている.これらの曲線を何らかの関
数で近似して表すことができれば,アルゴリズムの代表的な特性と平均誤差との関係を
定量的に分析することも可能になる.このような観点に基づき,ピクセル・サブピクセ
ル両解析過程の誤差特性について関数近似を試みた.
Fig.5.11 Schematic view of a model of residual appearance characteristics in pixel
analysis.
Fig.5.11 に,ピクセル解析の残差出現特性に対する関数近似の概要を示した.ここ
では,PIX-OFF のように 5.0r において全ての残差が現れるような分布を理想的な曲
線と考え,この曲線があるパラメターに依存して平滑化してゆくような関数を考える.
そこで,(5.4)式のステップ関数を基準に残差の出現を近似することにした.
)5.0(
)5.0(0)(
xh
xxf
m
(5.4)
(5.4)式における mh は,全ての残差が 5.0r に現れると仮定した場合の平均的な残差
密度に相当し,ここでは 3.127mh とした.また,(5.4)式のような )(xf に対し,ある対
象点を中心とするガウス分布を重み関数に用い,重み付き移動平均値の分布を求めるこ
とにより,Fig.5.11のようにモデル化された残差曲線を算出した.この曲線における変
動パラメターはガウス分布の標準偏差 であり,(5.5)式で表される.
5.0
5.0)(),,();( i
i
r
r ii dxxfrxNrh (5.5)

- 72 -
2
2)(exp
2
1),,(
rxrxN (5.6)
ここで, ),,( rxN は,(5.6)式で表される正規分布である.(5.6)式を から ま
で xで積分すると 1となるが,本論文で取り扱う の範囲では, 5.0r に積分範囲を限
定しても N の積分はほぼ 1 となる.このような理由から,(5.5)式においても 5.0ir の
範囲に限定して積分を行っている.(5.5)式において を変えながら計算を行なうと,
Fig.5.11のように矩形波が徐々に平滑化してゆく様子を表すことができる.ここで,積
分型と DCCの残差曲線と(5.6)式に対して最小二乗法を適用し,両者に相当する を求
めた.この結果,積分型では 077.0 ,DCC では 084.0 となり,両者の特性の違い
をパラメターで表現できたものと思われる.
Fig.5.12 Schematic view of a model of error characteristic of sub-pixel analysis.
Fig.5.12 に,サブピクセル誤差特性のモデル化における関数近似の概要を示した.
Fig.5.7 において見られたように,サブピクセル解析の誤差特性は 5.0r の前後で大き
く変化する.また,サブピクセル解析の本来の解析対象は 5.0r の領域の残差であり,
5.0r の領域は想定外の領域であると考えられる.これらの理由から 5.0r の前後領
域で異なる曲線を用い,誤差特性を表すことにした.これを式で表すと,(5.7)式になる.
)5.0()5.0(
)5.00(
rbra
rb
(5.7)
ここで,bは 5.0r における曲線の高さであり,この領域では誤差特性が一定であ
るものと仮定した.また, 5.0r においては一次関数を仮定し, 5.0r において 2 本
の直線が接続するものとした. ba, はそれぞれサブピクセル解析のロバスト性能と基本

- 73 -
性能を表すパラメターに相当している.Fig.5.8 で行った回帰分析においては 5.0r の
領域でも r に対する若干の誤差依存性が見られたが,ここではこの影響は小さいものと
仮定して簡略化を行っている.また,2直線の分岐点は,手法によっては 5.0r 以外の
点に現れる可能性も考えられるが,誤差特性をなるべく簡略化して表すために,この影
響も無視できるものとした.
Table 5.1 Comparison of parameters of present error communicating model.
Pixel analysis Sub-pixel analysis
a b
DCC 0.084 Gauss 1.130 0.105
Integral method 0.077 STD 1.115 0.114
PIX-OFF 0 STD-HE 1.028 0.094
Table 5.1に,本節で比較対象とするピクセル・サブピクセル解析手法に対応するパ
ラメターを示した.ピクセル解析については DCC,積分型,PIX-OFFの 3つを比較対
象とし,DCCおよび積分型については Fig.5.5の残差特性に最小二乗法を適用し,(5.5)
式におけるを算出した.また,サブピクセル解析の比較対象は Gauss,STD,STD-HE
であり,aについては Fig.5.8(*-2)の回帰直線の傾きを,bにおいては Fig.5.8(*-1)の領
域の平均値を用いることとした.
5.2.2 誤差伝播モデル
前節では, r に対する残差・誤差特性をそれぞれモデル化し,各特性のパラメター
表現を試みた.本節では,モデル化結果とこれに基づく誤差モーメント推定値に対し計
測値との比較を行い,本モデルの妥当性を検証する.
Fig.5.13 は,ピクセル解析残差特性のモデル化結果と,実際に計測された残差特性
との比較を示す.Fig.5.13(a),(b)はそれぞれ DCC と積分型の残差特性であり,モデル
による推定値は実線,計測値はマーカーにそれぞれ対応している.Fig.5.13(a),(b)から,
DCCと積分型に関しては,全体的な傾向は推定値と計測値がほぼ一致しており, 4.0r
付近から出現率が大きく減衰してゆく様子を本モデルが再現していることが確かめら
れる.ただし, 3.0r の領域では僅かにずれが生じ,本モデルが出現率を若干大きく推
定している.これは,計測値は r の増加とともに徐々に出現率が低下するのに対し,モ
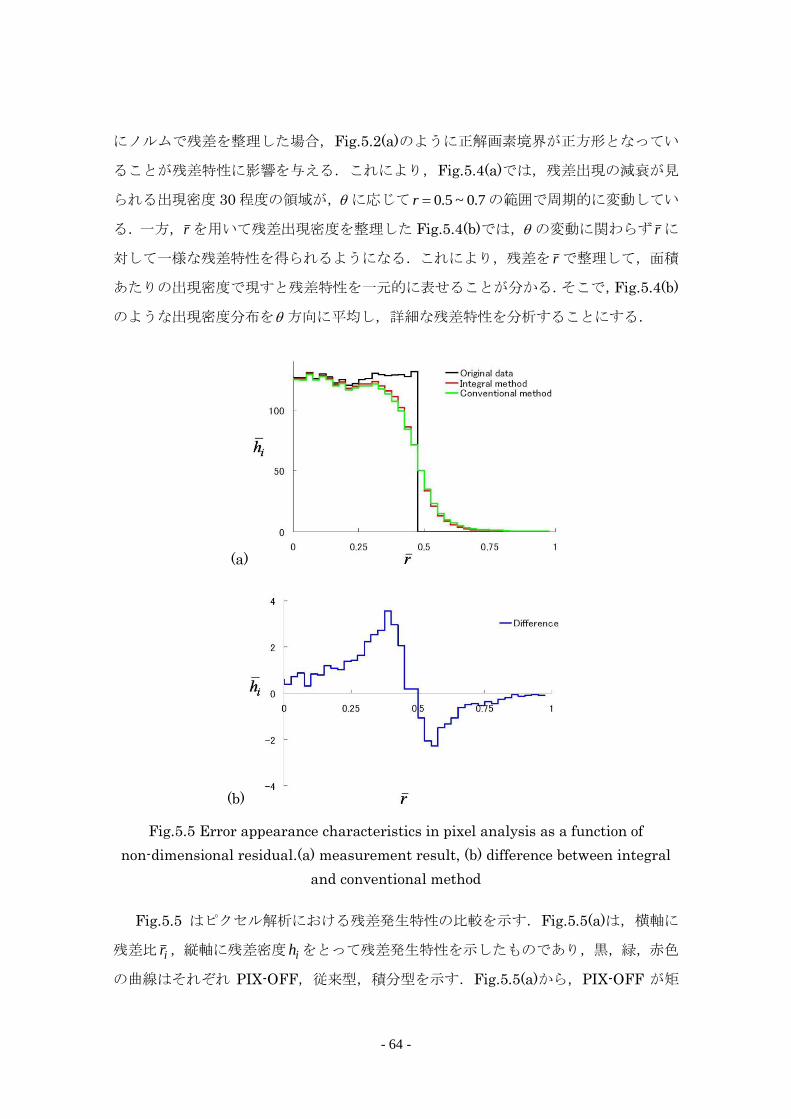
- 74 -
デルにおいては 3.0r 程度の領域まで一定値を取っていることが影響したものと考え
られる.Fig.5.13(c)は PIX-OFF の出現率であり,個々の点に対しては若干のずれが生
じているものの,平均的な出現率を再現できている.
(a) (b)
(c)
Fig.5.13 Comparison between estimated and measured residual appearance
characteristics.(a) DCC, (b) Integral method, (c) PIX-OFF
Fig.5.14 Difference between estimated and measured residual appearance
characteristics
Fig.5.14 は,残差密度の出現特性について計測値と本モデルの推定値を比較したも
のであり,横軸には残差比 r ,縦軸には推定値から計測値を差し引いた値を表示した.
5.0r の領域では,PIX-OFFについては計測値と推定値が一致しているが,DCCと積

- 75 -
分型においては,比較的大きい周期のずれが生じている.これは,Fig.5.13(a),(b)にお
いて 6.0r の前後で推定値と計測値にずれが生じていたことが原因だと考えられる.ま
た,この領域ではランダム性の強い高周波の振動は生じていないことから,本モデルで
使用した関数に依存してこのような差が生じたものと思われる.また, 5.0r の領域で
は,いずれの手法においても 25.0r が谷となるような低周波振動と高周波振動が複合
的に現れている.これらの振動は PIX-OFF においても生じており,Fig.5.13(c)におい
て PIX-OFFの計測値と推定値が平均的に近い値を取っていたことから,計測値そのも
ののばらつきに依存して発生したものと推察される.また,この領域で発生する高周波
振動の最大振幅は 15h 程度となっており,これ以下の残差密度の違いについては本
モデルで解像することが困難である可能性も考えられる.
(a) (b)
Fig.5.15 Comparison between estimated and measured residual appearance
characteristics in differences between (a) PIX-OFF and Integral method, (b)
Integral method and DCC.
Fig.5.15 は,手法間の差に着目して本モデルの再現性を検証したものである.
Fig.5.15(a)は PIX-OFFと積分型手法の差を取ったものであるが, 5.0r の前後では最
大で 100h 程度の差が生じており,本モデルで十分に解像可能であったことが確認で
きる.ただし,個別の h の値そのものの大きさに着目すると,例えば 3.0r 付近では
計測値と推定値の間に 5h 程度のずれが生じており,このような違いについては本モ
デルで解像できていないことも確認される.
Fig.5.15(b)は積分型から DCCの残差密度を差し引いたものである.Fig.5.15(b)から,
5.0r の前後で計測値の残差密度に 5h 程度のずれが生じていることがわかる.
Fig.5.15(a)では,このような大きさの残差密度の違いを本モデルで解像できなかったが,
Fig.5.15(b)のこの領域に関しては本モデルで再現できている.また, 3.0r においては
計測値と推定値の間に隔たりが生じているが,これについては Fig.5.14 において生じ

- 76 -
ていた振幅の大きい高周波振動の影響を受けて,本モデルで再現できなかったものと考
えられる.
(a) (b)
(c)
Fig.5.16 Comparison between estimated and measured error characteristics in
sub-pixel analysis. (a) Gauss, (b) STD, (c) STD-HE
Fig.5.16 は,サブピクセル解析誤差特性のモデル化結果と,実際に計測された誤差
特性との比較を示す.また,Fig.5.16のいずれにおいてもピクセル解析には DCCを用
いている.Fig.5.16(a)は,Gaussの誤差特性であり, 5.0r においては計測値と推定値
が良く一致しており,Gaussの基本性能を適切にモデル化できていることが分かる.た
だし, 5.0r の領域に関しては,誤差特性の傾きに相当するパラメター aを僅かに小さ
く推定しており,r の増加にしたがって徐々に推定値と計測値とのずれが増大する傾向
を示している.
Fig.5.16(b)は,STDの誤差特性を示したものである.全体的に見ると, 4.0r にお
ける誤差特性については平均的に近い値を推定できている.また,計測値では,この領
域で r に対する微小な誤差依存性を生じているが,本モデルはこのような影響を考慮し
ていないため,若干特性が異なっている.また,計測値においては 4.0r 付近から誤差
の増大が始まるのに対して,本モデルでは 5.0r まで一定の誤差発生を仮定している.

- 77 -
これにより, 5.0r における推定値と計測値との差が大きくなっていることが分かる.
また,傾きパラメター aに関しても,Gauss同様僅かに小さく推定している.
Fig.5.16(c)では,STD-HEの誤差特性の検証を行った.平均的に見ると,Fig.5.16(c)
は比較した 3つの手法の中で計測値の誤差特性を最も適切に表現できており,パラメタ
ー ba, が妥当な値を示していることが分かる.ただし, 75.0r においては推定値と計
測値の差が局所的に大きくなる点も生じており,特定の誤差要因に影響を受けている可
能性も考えられる.
(a) (b)
(c)
Fig.5.17 Comparison between estimated and measured error appearance from the
effect of pixel analysis. (a) DCC, (b) Integral method, PIX-OFF
入力特性の分析においては,残差の出現特性を分析するため残差出現率 ih を対象区
間の面積 )( irS で除した残差密度 ih を用いて特性検証を行ってきた.ここでは誤差特性
モデルの出力特性を分析するため,残差出現率×誤差量で推定される誤差の一次モーメ
ントを用いて特性検証を行う.誤差モーメントは,r に応じて積算区間が拡大すること
の影響を受けて,Fig.5.10同様 4.0r 付近で最大値を取る分布となる.
Fig.5.17 はピクセル解析手法の違いによって生じる誤差モーメント変化について,
本モデルによる誤差推定の妥当性を検証したものである.Fig.5.17では,サブピクセル

- 78 -
解析の代表的手法として Gaussを選択し,DCC,積分型,PIX-OFFと組み合わせて誤
差モーメントを求めた.Fig.5.17(a)は DCCにおける誤差モーメントの発生を表してお
り, 5.0r の領域では計測値とほぼ等しい推定値が得られている.また, 5.0r の領
域では 6.0r の前後で計測値と推定値の大きさが入れ替わっており,モーメント曲線の
面積すなわち平均誤差については,本モデルの推定値が計測値よりも僅かに小さい値を
示すものと考えられる.これは,Fig.5.14で見られた 6.0r 前後の本モデルと計測値の
残差特性の違いがモーメント曲線に影響したものと推察される.
Fig.5.17(b)は,積分型手法の誤差モーメント曲線を示したものである.Fig.5.17(b)
においては,DCC と異なり 5.0r で本モデルよりも小さい誤差モーメントが計測され
ている.モーメントの算出に使用した Fig.5.13(b)および Fig.5.16(a)のいずれにおいて
もこれに結びつく傾向は確認できず,原因については不明な点が残されている.また,
5.0r においては,DCC 同様 6.0r の前後で計測値と推定値が入れ替わっており,
Fig.5.14に示した本モデルの残差特性が影響したものと考えられる.
Fig.5.17(c)には PIX-OFFにおける誤差モーメントを表示したが,Fig.5.13(c)の残差
密度において本モデルと計測値のいずれも 5.0r で残差が生じていないため, 5.0r
の領域のみでモーメントが生じている.Fig.5.17(c)では,推定値よりも大きい誤差モー
メントが計測値に現れているが,モーメント算出に用いた Fig.5.13(c)や Fig.5.16(a)で
はこのような傾向は見られない.さらに,4 章においても PIX-OFF・Gauss の組み合
わせで同様の精度劣化が生じていたことから,何らかの要因によって Gauss の性能が
劣化した可能性も考えられる.このような性能変化は積分型でも生じていたが,いずれ
も原因は不明であることから,今後の課題とする.
(a) (b)
Fig.5.18 Comparison between estimated and measured error moment
characteristics in differences between (a) PIX-OFF and Integral method, (b)
Integral method and DCC.

- 79 -
Fig.5.18は,ピクセル解析手法の違いによって生じる誤差モーメント変化について,
計測値と推定値を比較したものであり,この曲線の積分値が手法間の平均誤差の違いに
相当する.Fig.5.18(a)は,PIX-OFF から積分型のモーメントを差し引いた値を示す.
Fig.5.18(a)では, 5.0r 前後で生じる計測値の大きいモーメント変化を本モデルも捉え
ている.また, 5.0r においては推定値と計測値の間にずれが生じているが,これは
Fig.5.17(c)のモーメント曲線の特性が影響したものと思われる.
また,Fig.5.18(b)は積分型から DCC の誤差モーメントを差し引いた値を示す.
Fig.5.18(b)では, 75.0~5.0r の領域で曲線が負の値を取る傾向については本モデルで
推定できているが, 5.0r の領域に関しては,推定値が正の値を示すのに対し,計測値
は負の値を示しており異なる傾向が見られる.この原因としては,Fig.5.15(b)における
本モデルの残差特性の解像度の問題や,Fig.5.17(b)のモーメント曲線の特性などが影響
したものと考えられる.ただし,モーメント総量の変化については計測値と推定値のい
ずれにおいても負となっており,統計値の傾向分析には特に問題は生じないと思われる.
(a) (b)
(c)
Fig.5.19 Comparison between estimated and measured error appearance from the
effect of sub-pixel analysis. (a) Gauss, (b) STD, (c) STD-HE
Fig.5.19 に,サブピクセル解析手法の違いによって生じる誤差モーメント変化につ
いて,本モデルによる推定値と計測値の比較検証を行った結果を示す.Fig.5.19のいず

- 80 -
れにおいてもピクセル解析の残差特性は DCCの場合のものを適用した.Fig.5.19(a)は
Gaussにおける誤差発生を検証したものである.これは,Fig.5.19(a)と同一の曲線であ
り,Gauss よる誤差発生を的確に捉えることに成功している.Gauss に関しては,
Fig.5.16(a)の誤差特性において比較的良好な推定結果が得られていたことが効果的に
機能したものと思われる.
Fig.5.19(b)は,STDを用いた場合の誤差発生特性の検証結果を示す.Fig.5.19(b)で
は,Gauss の場合に比べて計測値と推定値のずれが拡大しており, 4.0r の前後で推
定値と計測値の大きさが入れ替わっている.STD の誤差特性を示す Fig.5.16(b)におい
て, 4.0r を境に計測値と推定値の誤差感度が交差していることから,Fig.5.16(b)で
STD の計測値に生じていた僅かな傾きが,この領域のモーメント特性に影響したもの
と思われる.また, 4.0r においては推定値よりも大きい計測値が示されているが,こ
れについても,Fig.5.16(b)におけるモデルと計測値の差によって生じたものと推察され
る.
Fig.5.19(c)は,STD-HEにおける誤差発生特性の検証結果である.Fig.5.19(c)では,
STD 同様 4.0r の前後で推定値と計測値の大きさが入れ替わっている.Fig.5.16(c)に
おいて, 5.0r の STD-HE の計測誤差についても僅かに傾きを生じており,これがモ
ーメント曲線に反映されたものと考えられる.全体的には,STD 同様推定曲線の面積
が計測値よりも若干小さくなっているが,計測値と推定値のずれ幅は,STD よりも小
さい.これは,Fig.5.16(c)における誤差特性の推定精度が STD よりも向上していたこ
とが好影響を及ぼしたものと考えられる.
(a) (b)
Fig.5.20 Comparison between estimated and measured error moment
characteristics in differences between (a) STD-HE and Gauss, (b) Gauss and STD.

- 81 -
Fig.5.20 は,サブピクセル解析手法の違いによって生じる誤差モーメント変化につ
いて,計測値と推定値を比較したものである.Fig.5.20(a)は,STD-HE から Gauss の
モーメントを差し引いた値を示しており,この曲線の積分値が手法間の平均誤差の違い
に相当する.Fig.5.20(a)では,計測値と推定値のいずれにおいても曲線の積分値は負と
なっており,STD-HE による誤差改善の傾向を本モデルが捉えたことが確認できる.
5.0r の領域では計測値と推定値の傾向に違いが見られるが,これは,Fig.5.16(c)に見
られるように STD-HE の誤差特性を本モデルが簡略化して表現していたことが原因だ
と考えられる.
Fig.5.20(b)は Gauss から STD のモーメントを差し引いたものである.Fig.5.20(b)
では,Fig.5.20(a)同様計測値と推定値の曲線の積分値がいずれも負の値を示しており,
STD と Gauss の平均誤差の違いについても本モデルで分析可能であることがわかる.
また,積分値の大きさについては本モデルが若干小さい値を示している.これは
Fig.5.19 において本モデルが STD の誤差モーメントを過小に推定していたことが原因
だと考えられる.また, 5.0r における計測値と推定値の傾向の違いについても,
Fig.5.20(a)同様 STD に対して簡易的なモデル化を行なった影響によるものと推察され
る.
5.2.3 誤差モデルに基づく性能分析
本節では,誤差伝播モデルを用いて平均誤差の推定を行い,アルゴリズム間の特性
変化と平均誤差の増減の関係を分析する.さらに,平均誤差の推定値について計測値と
の比較検証を行い,モデルを用いた誤差推定の可能性についても検討する.
残差特性に起因する誤差変化の推定
Fig.5.21 は,(5.5)式のパラメター の変化に伴う誤差の変化についての分析結果で
ある.Fig.5.21(a)は入力部に相当する残差密度曲線と計測値との比較を示す.各手法に
対応する は,DCC,積分型,PIX-OFFの順にそれぞれ 0.084,0.077,0であること
から,誤差推定モデルのパラメター については 0~0.1 まで変化させることにした.
Fig.5.21(a)から,DCCと積分型の計測値の残差密度 h が大きく減衰する 6.04.0 r の
区間では,本モデルも近い推定値を得ることができている.ただし,Fig.5.13(a),(b)に

- 82 -
おいても見られたように, 4.0r の領域に関しては,推定値と計測値の間に若干ずれが
生じている.また,Fig.5.21(b)は本モデルに用いたサブピクセル解析の誤差感度特性曲
線であり,ここでは Gauss,STD,STD-HE各々に対応する曲線をモデルに適用した.
Fig.5.21(c)は,(a),(b)を掛け合わせて得られる誤差モーメント曲線を示す.サブピクセ
ル解析には,Fig.5.21(b)で示した 3 手法を用いて計算を行なうが,ここでは Gauss を
用いた場合の結果を代表値として表示した.また,これに対応する計測値の誤差モーメ
ント分布も合わせて表示している.DCC および積分型に対応するパラメター はそれ
ぞれ 0.084,0.077 であり, 5.0r においてはこれらの手法の誤差モーメント計測値が
いずれも 1.0 の推定曲線付近に現れる.特に, 7.0~5.0r の区間において計測値が
1.0~05.0 の曲線の範囲に現れていることから, 7.0~5.0r における誤差モーメン
トの変化を本モデルが適切に捉えているものと思われる.ただし,PIX-OFF に関して
は Fig.5.17(c)でも見られたように推定値よりも大きいモーメントが計測されており,適
切な誤差推定ができなかったものと考える.
Fig.5.21(d)は,計測誤差の平均値について本モデルの推定値と計測値を比較したも
のであり,縦軸は平均誤差,横軸はパラメター である.また,比較したピクセル解析
に対応するの位置を青破線で表示しており,計測値および推定値はそれぞれマーカー
および曲線で示している.Fig.5.21から,PIX-OFF・Gaussの組み合わせを除くと の
増加に伴って推定値と計測値が共に増加しており, が計測誤差に与える影響を本モデ
ルが良く推定できていることが確認される.ここで,Fig.5.21(c)に示した誤差モーメン
ト曲線に着目し,サブピクセル解析に Gauss を用いた場合の推定値と計測値の関係を
調べることにする.DCCについては,計測値が 084.0 に近い値を示しており,良好
な推定結果が得られている.これに伴い,Fig.5.21(d)においても計測誤差と推定誤差が
ほぼ同程度の値を取っていることが分かる.また,積分型と PIX-OFF については,
Fig.5.21(d)の誤差推定曲線が,計測値に対してそれぞれ過大・過小評価となっている.
これらについて,Fig.5.21(c)のモーメント曲線を確認すると, 5.0r の領域でモーメン
ト推定値と計測値の間に大きい差が生じており,この影響によって(d)の統計値にずれ
が生じていたことが分かる.ただし, 5.0r の領域に関しては,PIX-OFF( 0 )では
計測値と推定値が一致しているし,積分型( 077.0 )についても計測値と推定値が近い
値を示している.これらの分析から, 5.0r における誤差モーメントの挙動に関しては,

- 83 -
本モデルによって適切に捉えることができたものと考える.
(a) (b)
(c) (d)
Fig.5.21 Estimation of accuracy improvement from the effect of varying .
(a) residual appearance density, (b) error sensitivity characteristics,
(c) moment curve, (d) mean error
サブピクセル解析のロバスト性能に起因する誤差変化の推定
Fig.5.22 は,誤差特性曲線の傾きを与えるパラメター aを変化させた場合の誤差変
化を推定したものである.Fig.5.22(a)は本モデルに用いたピクセル解析の残差密度曲線
であり,DCC,積分型,PIX-OFFに対応するパラメター によって与えられる曲線を
用いた.Fig.5.22(b)は,ここでの誤差推定に用いた誤差感度曲線と,計測値の誤差感度
を合わせて表示したものであり,計測値およびモデルの値をそれぞれマーカーと実線で
示した.ここでの比較対象は,Gauss,STD,STD-HEの 3手法である.傾き aの変化
による誤差変化のみを抽出するため,切片bについては比較した 3手法の中央値(Gauss,
105.0b )に固定して,傾き aのみが変化する誤差感度曲線を考えることにした.Gauss,
STD,STD-HE に対応する aは,それぞれ順に 1.13,1.12,1.03 であるので,本モデ

- 84 -
ルにおいては 2.1~0.1a の範囲を調べることにする.
(a) (b)
(c) (d)
Fig.5.22 Estimation of accuracy improvement from the effect of varying a .
(a) residual appearance density, (b) error sensitivity characteristics,
(c) moment curve, (b) mean error
Fig.5.22(b)において,本モデルと計測値を比較する. 5.0r の領域に関して,
STD-HE( 03.1a )についてはモデルと推定値が近い値を示している.また,Gauss に
対応するモデルのパラメターは 1.13であるが,計測値の傾きは 1.2程度となっており,
若干異なる傾向が見られる.STD( 12.1a )については,計測値の傾きは Gauss 同様 1.2
程度となっているほか, 5.0r における誤差感度が他 2手法よりも高く,これによりモ
デルと推定値の差が拡がっている.また, 5.0r の領域に関しては,いずれの手法の計
測値も推定値と僅かに異なる特性を示している.
Fig.5.22(c)は,誤差モーメントの計測値と推定値の比較を示す.ピクセル解析は,
Fig.5.22(a)に示した 3手法で行なうが,ここではこれらの代表値としてDCCを選択し,
誤差モーメントを表示した.また,推定値については実線,計測値はマーカーを用いて

- 85 -
表した.本モデルの推定値では, 5.0r においてモーメントが変化しているが,検証し
た aの範囲では僅かな違いを生じるのみであった.計測値においても 5.0r のモーメン
ト分布に手法間の差が生じているが, 5.0r の領域で生じる差のほうが相対的に大きく
なっている.
Fig.5.22(d)は,計測誤差の平均値について本モデルの推定値と計測値を比較したも
のであり,縦軸は平均誤差,横軸は傾き aである.誤差の推定値は実線,計測値はマー
カーを用いて示し,比較したサブピクセル解析手法に相当する aの位置を青破線で指示
している.Fig.5.22(d)では,比較した範囲では推定誤差がほとんど変化していない.ま
た,計測値については手法間の違いが見られるが,Fig.5.22(c)に示した誤差モーメント
の分布状況を勘案すると,計測値の誤差の違いのほとんどは 5.0r の分布の違いによっ
てもたらされ,傾き aの影響は僅かであることがわかる.
サブピクセル解析の基本性能に起因する誤差変化の推定
Fig.5.23 は,誤差特性曲線の切片を与えるパラメターbを変化させた場合の誤差変
化を推定したものである.Fig.5.23(a)は入力部に用いたピクセル解析の残差特性であり,
Fig.5.22同様 DCC,積分型,PIX-OFFに相当するモデルを使用した.Fig.5.23(b)は本
モデルに用いた 3本の曲線と,計測値の誤差特性を比較したものであり,本モデルを実
線,計測値をマーカーで示した.ここでは,切片bのみの影響を抽出するために,傾き
aについては中央値に相当する STD の値( 12.1a )に固定して誤差推定を行なった.
Fig.5.23(b)の 5.0r において,STDと STD-HEの計測値には若干の傾きが生じている
が,本モデルではこの影響を無視して平均的な誤差特性を分析対象としている.各手法
に対応するモデルのパラメターbは,STD,Gauss,STD-HE の順に 0.114,0.105,
0.094であり,計測値の 5.0r における平均的な誤差感度を適切に抽出できている.
Fig.5.23(c)は,誤差モーメントに着目して計測値と本モデルの比較を行なったもの
である.ここでは,Fig.5.21 同様 DCC を用いた場合の結果を代表値として表示した.
5.0r の領域では,切片bの減少に追随して STD,Gauss,STD-HE の順に誤差モー
メントが減少している. 5.0r の領域においても手法間のモーメント変化は生じている
が, 5.0r において生じる違いに比べると手法間の違いは相対的に小さいことが分かる.
Fig.5.23(d)は,本モデルによる誤差推定曲線と,計測値の平均誤差を比較したもの

- 86 -
であり,縦軸は平均誤差,横軸は切片bを示す.また,比較したサブピクセル解析手法
に対応する bの位置を,青破線で表示した.Fig.5.21(c),(d)において特異な傾向が見ら
れた PIX-OFF・Gaussを除くと,推定曲線と計測値が同じ傾向を示しており,特に DCC
と PIX-OFF では定量的にも計測値と推定値が近い値を示している.DCC を用いた場
合では,Fig.5.23(c)で確認されたようにモーメント曲線を比較的良い精度で得られたこ
とが,Fig.5.23(d)の良好な推定結果に繋がったものと考えられる.また,積分型と
STD-HE,Gauss の組み合わせについては推定よりも計測誤差が小さくなっているが,
この原因については不明な点が残されている.ただし,この 2手法間の差については本
モデルで捉えることが可能であった.Fig.5.23(d)における誤差曲線の傾きは,
Fig.5.21(d),22(d)で用いたパラメター a, に対するものよりも大きく,Fig.5.23(d)にお
いて比較的良好な誤差推定結果が得られたことから,本モデルで用いた 3つのパラメタ
ーのうち切片bが最も支配的であることが示された.
(a) (b)
(c) (d)
Fig.5.23 Estimation of accuracy improvement from the effect of varying b .
(a) residual appearance density, (b) error sensitivity characteristics, (c) moment
curve, (b) mean error

- 87 -
性能評価のまとめ
これまでの分析結果から,本節で提案した誤差推定モデルは,計測誤差の定性的評
価が可能であることが示された.また,一部の手法に関しては定量的にも精度良く誤差
を推定可能であった.さらに,本モデルで使用したパラメターのうち,切片bが平均誤
差に対して支配的であり,これに次いで入力部のパラメター の影響度が大きいことが
分かった.また,傾き aについては,積分型で比較した範囲ではほとんど影響は生じな
かった.これは,冒頭の Fig.5.2で見られたように,出現頻度で見ると 5.0r で現れる
残差が 5.0r よりもはるかに多いことから, 5.0r の誤差特性が誤差モーメントの挙動
に大きく影響するためである.また,入力部のパラメター は切片bに次いで平均誤差
への影響度が大きく,出力部の傾き aの影響は僅かであった.誤差伝播モデルの基本的
性質として, 5.0r の残差出現が増加するほど傾き aの影響度は拡大する.本モデルは,
75.05.0 r の残差出現は比較的良く再現していたが, 175.0 r の領域の残差の再現
性には限界が見られた.また, 5.0r の誤差特性についても計測値より若干低く見積も
る傾向にあった.これに伴って,Fig.5.21(c)~5.23(c)では 5.0r の誤差モーメントを計
測値よりも小さく推定していた.したがって, a, のような 5.0r での残差・誤差パラ
メターへの誤差依存性は本モデルの結果よりも若干大きくなるものと推察される.この
影響をより正確に抽出するためには,モデルに用いる近似関数の性質やパラメターの数
について改めて検討する必要がある.ただし,現段階でも最小で+3%,最大でも+22程
度の精度で平均誤差を推定可能であり,手法間の定性的評価も可能であることから,本
章のモデル化に一定の正当性を得たものと考える.
本モデルの性能を踏まえたうえで,これまで独立に変化させてきたパラメター
ba,, を同時に取り扱い,計測アルゴリズムの組み合わせと最終的な性能評価を行う.
Fig.5.24は,本モデルにおけるパラメター空間と,計測誤差との関係を模式的に表した
図である.Fig.5.24の縦軸は残差特性 ,横軸は傾き aをそれぞれ示し,紙面に対して
鉛直方向に切片 aが存在する.ただし, aの影響は小さいものとして,STD-HE に対応
する値に固定して誤差推定を行った. ba, の変化に対応する平均誤差はカラーマップで
表示している.ここでは,原点Oからのノルムに関連して誤差が増大するようなパラメ
ター空間を想定しているが,各パラメターへの誤差依存性はそれぞれ異なる.このため,
誤差の等値線は,b方向の勾配が最も大きく, の増大に伴って 方向の勾配も徐々に

- 88 -
増加する性質を持つ.また,Fig.5.24では無視しているが,aが変化した場合には へ
の誤差依存性が僅かに変化することになる.
Fig.5.24 Schematic view of parametric space in present error model.
このような空間において,ある手法に対するパラメター ab ,, を全て与えると,そ
の座標に対応する点の関数値として平均誤差を推定可能になる.Fig.5.24 の b 平面
に限定して考えると,DCC などのピクセル解析に対応する および,Gauss などのサ
ブピクセル解析に対応するbについて黒実線で示す直線が与えられ,これらの交点の座
標における誤差が,最終的な誤差推定値を与える.本論文では,第 3章ではピクセル解
析,第 4章ではサブピクセル解析手法を開発してきたが,これらに対する性能評価はそ
れぞれ独立に行っていた.しかし,Fig.5.24の誤差推定モデルを用いて性能分析を行う
と,例えば積分型と STD-HE のように組み合わせて用いる場合にも,両手法の精度向
上への寄与分をそれぞれ抽出することも可能であるし,最終的な計測誤差についても推
定可能となる.このような PIV 誤差推定モデルは,本論文で開発した手法の性能評価
だけでなく,今後の更なる手法開発においても新手法の性能評価に活かされるものと思
われる.

- 89 -
以上の結果から,本節ではピクセル解析で生じた残差特性が,サブピクセル解析の
誤差特性と相互に影響を及ぼし合い,最終的な統計誤差の変化へと結びつく誤差伝播メ
カニズムを統計的に示した.また,このメカニズムに対してモデル化を行い,パラメタ
ーを用いた PIV アルゴリズムの性能評価を試みるとともに,モデル化の妥当性につい
て検証した.検証の結果,本節で提案した誤差推定モデルは,計測誤差の定性的評価が
可能であり,定量的評価に関しても一定の可能性を示すことができた.

- 90 -
5.3 結言
第 5 章では,PIV アルゴリズムにおけるピクセル解析およびサブピクセル解析の性
能を総合的に評価可能な性能分析法の開発を行なった.5.1 節では,ピクセル解析で発
生する残差に着目し,その発生特性を調査して,残差特性の一元化を図った.これによ
り,ピクセル解析単体での性能分析が可能になった.さらに,5.1 節同様サブピクセル
解析における誤差発生を残差で整理し,その特性を分析した.この結果,ピクセル解析
の正解画素境界付近の領域を境にサブピクセル解析の誤差特性も大きく変化すること
を確かめた.
5.2 節では,これらの結果に基づいて,PIV アルゴリズム性能の総合評価を行なっ
た.ピクセル解析の残差特性がサブピクセル解析における入力に相当することに着目し,
最終的な誤差発生をモーメント曲線で評価した.さらに,サブピクセル解析誤差特性の
統計的性質を用いることにより,誤差伝播メカニズムを明らかにした.このメカニズム
に基づいて,ピクセル・サブピクセル解析の計測特性を関数近似することにより解析手
法のパラメター表現を試み,誤差発生メカニズムのモデル化を行なった.実際の計測値
と比較して本モデルの妥当性を検証した結果,計測誤差の定性的評価が可能であり,定
量的評価に関しても一定の可能性を示した.これらの分析結果から,本モデルに基づい
て PIV アルゴリズムの性能評価を行うことにより,ピクセル・サブピクセル解析単体
での性能をそれぞれ個別に抽出し,同列に取り扱って性能評価が行えることを示した.
本モデルでは,ピクセル・サブピクセル解析に対して簡易的な関数近似を施したた
め,モデルと計測値との間に若干の特性の違いが生じていた.今後,本モデルにおける
残差・誤差特性の関数近似をより適切なものへと改善することにより,本モデルの更な
る性能向上が期待される.さらに,画像ノイズや面外速度成分・粒子径などの画像パラ
メターに対する本モデルの依存性を検討することにより,本節の成果が実験画像におけ
る誤差推定や精度管理に貢献できるものと考える.

- 91 -
第6章 結 論
本論文は,粒子画像流速測定法における計測の概念を時空間領域での流場解析へと
拡張し,流体運動の基礎方程式に立脚した次世代の PIV 解析手法に対する提案を行な
ったものである.時空間領域では,従来の PIVで計測対象とされてきた速度分布は「場」
として存在する.本研究は,これを多次元解析により「場」として直接取り出すことを
目的としている.これにより,解析対象物理量は速度だけでなくその勾配や曲率といっ
た高次の物理量へと拡張される.高次の物理量は流体の基礎方程式を構成する要素にな
るので,流体現象の物理的因果関係に基づいた流場の PIV 解析も可能になるものと考
えられる.本論文では,このような観点から PIV 高次解析手法の可能性について研究
を行った.本論文から得られた成果は,以下のようにまとめられる.
第 2章では,PIVの基本原理を引用して計測の基礎方程式を記述し,PIVの最終的
な目標が速度場の包絡面であることを示した.また,相関法と時空間微分法の原理を示
し,従来用いられてきた解析アルゴリズムの一例を示した.さらに,高速度・高精細画
像から得られる画像相関情報の情報密度に着目し,時空間相関情報の概念とこれに基づ
く流場の多次元解析の可能性について述べた.多次元解析を行うための具体的手法開発
についても検討し,相関法と時空間微分法に基づく高次解析手法の開発方針を示した.
第 3 章では,第 2章で示した概念に基づいて,具体的な高次解析手法の開発を行っ
た.ここでは,相関値の時空間における経路積分に基づく評価指標を導入し,相関値の
連続性を定量的に評価可能な手法を開発した.また,従来用いてきた相関法が微分操作
に相当することに着目し,相関法を相関分布同士に繰り返し適用することによって,帰
納的に高次解析へと展開可能な手法を開発した.さらに,これらの原理を計算機上で実
現可能な具体的アルゴリズムの開発を行った.これらの手法は,精度劣化を生じずに速
度の時空間勾配まで計測可能であり,速度の実質微分に着目した新しい PIV 解析の可
能性を示した.また,積分型手法においては,従来よりも高い空間解像度で流場解析を
行なえることを示した.
第 4 章では,従来の高精度手法である時空間微分法に着目し,サブピクセル解析の
更なる高精度化を図った.時空間微分法における計測原理の導出過程に立ち戻り,輝度
および速度場のテイラー展開における高次項を用いることにより,より高度な計測原理

- 92 -
を開発した.さらに,非線形方程式に対する数値解法を適用することによって具体的ア
ルゴリズムを開発した.開発した手法 VAJ 標準画像を用いた性能評価の結果,開発し
た手法が従来よりも高い精度と安定性を両立していることを確かめた.
第 5章では,ピクセル解析過程とサブピクセル解析過程を分離して性能評価を行い,
各解析過程個別での計測特性を明らかにした.また,これらの統計的性質に基づいて
PIVの解析メカニズムを明らかにした.このメカニズムをモデル化して考え,PIVアル
ゴリズムの誤差伝播モデルを構築した.実際に得られた計測値と比較して本モデルの性
能を検証した結果,異なる手法間の性能を定性的に評価可能であることを示した.また,
アルゴリズム性能の定量評価に対しても一定の可能性を示した.これにより,本論文で
行なった手法開発の成果についても総括した.
これらの成果から,以下の結論を得る.
時空間相関情報の概念を示し,「場」を計測対象として多次元解析を施すこ
とにより,新しい計測の可能性が拓かれることを示した.
時空間相関情報の微・積分に基づく PIV 高次解析手法を開発し,速度とそ
の実質微分の同時計測を可能にするとともに,計測値の解像度をさらに向
上できる可能性を示した.
時空間微分法の原理を高次に展開し,高次微分項を速度評価に取り入れて
手法開発を行うことにより,サブピクセル解析の基本性能を向上した.
ピクセル解析とサブピクセル解析について個別の性能評価を行うとともに,
この間の誤差伝播メカニズムについて分析し,今後の手法開発に対する指
針を示した.
本論文では,微・積分型手法とともに,高次展開型時空間微分法の開発を行ったが,
これらの手法を組み合わせて用いることにより,更なる高精度解析や高次物理量解析へ
の展開が期待される.本論文では画像から速度とその一階微分まで求めることに成功し
ているが,今後,速度の 2階微分まで解析可能になれば,流体の基礎方程式を構成する
物理量全てを求めることも可能になる.これにより,本研究の目指す物理的因果関係に
立脚した流体解析手法の確立が達成されるものと考えられる.さらに,現在精力的に研
究開発が行われている 3 次元の PIV 計測技術が確立されれば,本研究内容との相乗効
果により実験流体力学の発展に貢献できるものと期待される.

- 93 -
謝 辞
本論文の作成や日々の研究活動だけでなく,大学院での筆者の活動全てにおいて終
始熱心に指導し,叱咤激励してくださった西尾 茂 教授に対して心より感謝致します.
小林 英一 教授には,本研究に対し多くの有益な御助言を頂くとともに,修士論文
に引き続いて本論文の審査を快諾して頂きましたことに御礼申し上げます.また,阿部
晃久 教授には,研究・学習の両面で的確な御助言を多数頂きましたことに感謝します.
神戸大学名誉教授 定兼 廣行 先生からは,貴重な御助言および御指摘多数頂きました.
ここに厚く御礼申し上げます.勝井 辰博 准教授には,本研究内容の作成において活発
に議論していただきましたことに感謝申し上げます.
関西大学,植村 知正 教授からは,多くの御助言と暖かい激励を頂きましたことに
御礼申し上げます.京都工芸繊維大学,村田 滋 教授には,貴重な御助言を多数頂きま
したことに感謝申し上げます.東京大学,岡本 孝司 教授からは,研究に関する資料や
貴重なサンプルコードを頂くとともに,筆者の研究活動を支援していただきましたこと
に厚く御礼申し上げます.
6年に渡る研究室での活動のうち,約 3年間に渡り共に研究・学習を行なった木村 知
幸 氏,ユニバーサル造船,井上 寛文 氏(研究当時,船舶工学研究室に在籍)ならびに
松田 識史 氏に御礼申し上げます.また,筆者と共に PIV に関する研究テーマに取り
組んだ川勝 麻由 氏に感謝致します.さらに,船舶工学研究室において出会った多くの
学生諸氏に感謝の意を記します.

- 94 -
参考文献
[1] O. Reynolds : An experimental investigation of the circumstances which
determine whether the motion of water shall be direct or sinuous and the law
of resistance in parallel channels, Philosophical Transactions of the Royal
Society, 174 (1883), pp.935-982.
[2] L. Prandtl, O. Tietjens : Hydro und Aeromechanik, 2 (1931) Springer.
[3] カルマン (谷一郎(訳)):飛行の理論 (1956) 岩波書店.
[4] 浅沼強 編:流れの可視化ハンドブック (1977) 朝倉書店.
[5] Nayler J. L., Frazer B. A. : Preliminary report upon an experimental method
of investigating, by the aid of kinematographic photography, the history of
eddying flow past a model immersed in water, Tech. Rep. Advisory Commit.
For Aeronau. For 1917-18, Vol. 1, London, His Majesty’s Stationery Office
(1917).
[6] 可視化情報学会 編:PIVハンドブック (2002) 森北出版.
[7] 西尾茂:PIV開発の足跡,可視化情報学会誌,Vol. 29, No. 112 (2009) pp.3-9.
[8] 木原信敏,斉藤悦朗,蒲原正宏,中田康男,岡本憲明,中鉢良治:Mavica System,
テレビジョン学会技術報告,5 (45), (1982) pp.25-31.
[9] 塩野浩一:CCDイメージ・センサの歴史,トランジスタ技術,Vol. 40, No. 2 (2003)
pp.156-157.
[10] Kimura I. : Image Processing Instrumentation of Flow Velocity Vector
Distribution by Using Correlation Technique ; Application to Vortices in the
Wake of a Circular Cylinder, Trans. SICE, Vol.23-2 (1987) pp.101-107.
[11] 笠木伸英,木村龍治,西岡道男,日野幹雄,保原充 編:流体実験ハンドブック
(1997) 朝倉書店.
[12] L. S. G. Kovasznay:熱線流速計,東京大学宇宙航空研究所報告,第 4巻,第 1
号 A (1968) pp.1-17.

- 95 -
[13] Arroyo M. P., Greated C. A. : Stereoscopic particle image velocimetry,
Measurement Science and Technology, Vol. 2 (1991) pp.1181-1186.
[14] Prasad A. K., Adrian R. J.: Stereoscopic particle image velocimetry applied to
liquid flows, Experiments in Fluids, Vol.15 (1993) pp.40-60.
[15] J. G. Santiago, S. T. Wereley, C. D. Meinhert, D. J. Beebe, R. J. Adrian: A
particle image velocimetry system for microfluidics, Experiment in Fluids, 25
(1998) pp.316-319.
[16] C. D. Meinhert, S. T. Wereley, J. G. Santiago: measurements of a
microchannel flow, Experiment in Fluids, 27 (1999) pp.414-419.
[17] 速水洋,荒巻森一朗:ダイナミック PIV を用いた流体計測,可視化情報学会誌,
Vol.25 No.96 (2005) pp.20-24.
[18] Hayami H., Okamoto K., Aramaki S., Kobayashi T. : Development of a new
dynamic PIV system, Proceedings of the 7th International Symposium of
Fluid Control, Measurement and Validation (2003) pp.1-6.
[19] Raffel M., Willert C., Kompenhans J. : Particle Image Velocimetry, a Practical
Guide (1998) Berlin: Springer.
[20] Hori T., Sakakibara J. : High-speed scanning stereoscopic PIV for 3D vorticity
measurement in liquids, Measurement Science and Technology, Institute of
Physics, 15 (2004) pp.1067-1078.
[21] 岡本孝司,佐賀徹雄,西尾茂,小林敏雄:三次元粒子画像流速測定法(3DPIV),
可視化情報学会誌,Vol. 17, No.67 (1997) pp.3-8.
[22] 西野耕一:3次元 PIVの実用化に向けて,可視化情報学会誌,Vol. 20, No.77 (2000)
pp.7-13.
[23] Scarano F. : Iterative image deformation methods in PIV, Measurement
Science and Technology, Institute of Physics, 13 (2002) pp.R1-R19.
[24] Scarano F. : A super-resolution particle image velocimetry interrogation
approach by means of velocity second derivatives correlation, Measurement

- 96 -
Science and Technology, Institute of Physics, 15 (2004) pp.475-486.
[25] Sugii Y., Nishio S., Okuno T., Okamoto K.: A highly accurate iterative PIV
technique using a gradient method, Measurement Science and Technology,
Vol.11 (2000) pp. 1666-1673.
[26] Nishio S., Sugii Y., Okuno T.: Analytics of PIV measurement for its higher
performance, Proceedings of 4th International Symposium on Particle Image
Velocimetry, Goettingen, Germany, September, pp.1066.1-10.
[27] Nishio S., Okuno T.: Statistical Approach to the Measurement of Velocity
Field, Journal of Visualization, 1(2) (1998) pp.161-170.
[28] Horn B. K. P., Schunck B.G.: Determining Optical Flow, Artificial Intelligence,
17 (1981) pp.185-203.
[29] 安藤繁:画像の時空間微分算法を用いた速度ベクトル分布計測システム,計測自
動制御学会論文集,Vol. 22, No. 12 (1986) pp.88-94.
[30] 筤源亮:トレーサ画像の相関処理による流速計測,流れの可視化,Vol.3, No.10
(1983) pp.189-192.
[31] 山本恭史,植村知正,米原紀吉:時空間微分法を用いた PIVサブピクセル解析に
おける空間勾配の差分近似について,日本機会学会論文集(B編), Vol.70, No. 695
(2004) pp.53-60.
[32] Okamoto K., Nishio S., Saga T., Kobayashi T.: Standard Images for Particle
Image Velocimetry, Measurement Science and Technology, Vol.11, No.6 (2000)
pp. 685-691.
[33] 藤田一郎:時空間微分に基づく高精度 PIVの開発, 水工学論文集, Vol.48, (2004)
pp.721-726.
[34] 西尾茂,岡本孝司,佐賀徹雄,杉井康彦:画像の時空間微分を利用した流場の計
測手法 -サブピクセル解析としての応用と高次近似項の評価-,可視化情報学
会誌,Vol.22. Suppl. No.1 (2002) pp.201-204.

- 97 -
公表論文
(1) 西尾茂, 桐本兼輔:PIV計測における相関分布の高次解析 -粒子パターン変形
が及ぼす影響について-,可視化情報学会誌, Vol.25, Suppl. No.2, pp.197-200,
2005.
(2) Kirimoto K., Nishio S. : Development of Higher-Order Analysis for
Multi-Frame Time-Resolved PIV, Proceedings of the 12th International
Symposium on Flow Visualization, pp.115.1-8, September 2006, Goettingen,
Germany.
(3) 桐本兼輔,西尾茂:画像相関情報に基づいた多時刻高次解析に関する研究,可
視化情報学会誌,Vol.26, Suppl. No.2, pp.303-306, 2006.
(4) Nishio S., Kirimoto K. : Higher-Order Analysis of Correlation Information
for Multi-Frame PIV Images, Proceedings of the 6th Pacific Symposium on
Flow Visualization and Image Processing, pp.384-389, May 2007, Hawaii,
USA.
(5) 桐本兼輔,西尾茂:画像相関情報に基づいた多時刻高次解析に関する研究(第 2
報)-帰納的アルゴリズムの開発-,可視化情報学会誌, Vol.27, Suppl. No.1,
pp.163-166, 2007.
(6) 桐本兼輔,西尾茂:時空間相関情報を用いた多次元高次 PIV解析,日本機械学
会講演論文集(2), pp.111-112, 2007.
(7) 桐本兼輔,西尾茂:時空間微分法の高次展開に関する研究 -支配方程式と数
値解法の検討-,可視化情報学会誌, Vol.28, Suppl. No.1, pp.23-26, 2008.
(8) Nishio S., Kirimoto K. : Advanced Flow Field Analysis by Means of
Higher-Order PIV Measurement, 6th Japan-Korea Joint Seminar on
Particle Image Velocimetry, pp. 41-48, 2008, Soul, Korea.
(9) Kirimoto K., Nishio S. : Development of Highly Expanded Gradient Method
for Super Resolution Sub-Pixel Algorithm, Proceedings of 8th International
Symposium on Particle Image Velocimetry, pp.0117.1-4, August 2009,

- 98 -
Melbourne, Australia.
(10) 桐本兼輔,西尾 茂:時空間相関情報の多次元解析に関する研究 -PIV 高次解
析手法の開発-,可視化情報学会論文集,Vol.29, No.11, pp.67-75, 2009.
(11) 桐本兼輔,西尾 茂:時空間微分の高次項を用いた高精度サブピクセル解析手
法の開発,可視化情報学会論文集,Vol.30, No.1, pp.1-8, 2010.

- 99 -
付 録
付録 A 一般的な PIVサブピクセル解析
PIV においてサブピクセル解析を行う理由は,高い空間解像度で速度の解析値を得
るためである.一般的な PIVにおいて,相関領域サイズは 202~302 (pixel)程度であり,
画像の移動量は 0~20(pixel)の範囲の値となる.また,ピクセル解析の精度は平均
0.5(pixel)であることから,画像の移動量が小さい場合には相対誤差が増大し,計測が
困難となる.この相対誤差を減少させるためにはいくつかの方法が考えられ,その 1つ
として空間解像度の向上が挙げられる.しかし,例えば解像度が 10 倍になれば相対誤
差は現在の 1/10となるが,同時に相関領域サイズも 10倍になるため,計算量は最低で
も 102倍となり,解析に要する計算量は飛躍的に増大する.そこで,計算量の増加を招
くことなく相対誤差を減少させるために,PIVではサブピクセル解析を行う.
サブピクセル解析は,量子化された情報から画素間の空間的情報を推定することによ
り 1画素以下の精度を得る解析過程である.もともと,可視化画像には空間以上に輝度
情報が多く含まれているので,これを利用して精度を上げることができる.情報を復元
するためには,複数の点の情報を用いて補間を行うか,関数近似を行い連続的に定義す
ることなどが考えられる.具体的には,粒子画像を線形補間によって変形しながら相関
最大値を求める手法や,画像輝度の微分値を用いて画像の微小な移動量を補間する時空
間微分法,確率密度関数を用いて相関分布最大値を推定するガウス分布近似手法など,
様々な手法が存在する.
本研究で開発した高次解析手法においても,サブピクセル解析は非常に重要である.
本手法の計測目標は高速撮影画像であり,1フレームあたりの画像の移動量が1ピクセ
ルに満たない画像であるため,速度解析過程における計測精度はサブピクセル解析精度
に大きく依存することが予測される.また,一般に微分値はもとの値よりも小さい値を
とることから,1次以降の高次微分解析においても計測値のほとんどが1ピクセル以下
の値を取るものと考えられる.
積分型アルゴリズムは,解析の各階において生成される相関分布の最大値の座標を求
める解析過程を有している.本研究では,この解析過程において従来のガウス分布近似
手法を適用し,計測値の精度向上を目指した.ガウス分布近似手法は,相関分布最大値

- 100 -
まわりの分布に関数近似を適用し,最大値の座標をサブピクセル精度で解析する手法の
一つである.ガウス分布近似手法の計測原理を以下に示す.
画像中の粒子像の輝度分布がガウス分布になると仮定すると,相関分布最大値近傍の
分布形状はガウス分布となる.この性質を利用し,相関分布最大値近傍の数点の情報を
用いて相関分布をガウス分布で近似して,最大値の座標を推定する手法がガウス分布近
似手法である.ガウス分布を表す関数は,定数 , を用いて(A-1)式で表され, x の
とき xf は最大値をとる.
2
2
exp2
1
xxf (A-1)
(A-1)式の関数を定義するためには最低でも 3 点の情報が必要である.最大値およ
び隣り合う 2点の計 3点の相関値を用いると,サブピクセル移動量を含む画像の移動量
uは(A-2)式で表される.(A-2)式中 maxu はピクセル移動量, C は各点における相関係数
値である.
1lnln21ln
1ln1ln
2
1
maxmaxmax
maxmaxmax
uuu
uuuu
CCC
CC (A-2)
Fig.A-1 Schematic view of sub-pixel analysis with Gaussian fitting method.
Fig.A-1にガウス分布近似の概念図を示した.図中黒点で示した点が,実際の計測で
得られた相関係数値を示しており,赤実線で示した曲線は上記の 3点を通るという仮定
0
0.5
1
u
1max u maxu 1max u
Estimated coordinate of maximum point
Measured digital value
Estimated continuous value uC

- 101 -
の下に推定されるガウス分布型の曲線である.Fig.A-1に赤破線で示した最大値の推定
座標をサブピクセル移動量を含む最大値の座標と定義する.Fig.A-1は 1次元で示して
いるが,実際には yx, 方向に(A-1)式の計算を行う.以上がガウス分布近似を用いるサブ
ピクセル解析手法の解析手順である.この手法の大きな長所は,計算量が比較的少ない
ことおよび,画像ノイズなどの影響を受けにくいことであるが,一般にガウス分布近似
手法の計測限界は 1/10pixel程度といわれており高い精度が要求される解析には不向き
である.
付録 B 画像変形に対する誤差発生特性
PIV 計測に用いる粒子画像は,流場の伸縮,剪断,回転などにより粒子の分布パター
ンが変形し,画像解析の誤差要因となる.PIV 計測における画像変形に対する誤差の発
生特性は,変形の形態により異なる.誤差分析を行う際には,これらの誤差要因を一元
的に取り扱うパラメターがあれば,誤差特性の分析に有効である.
本文(4.11)式に用いた変形パラメターQは,VSJ 標準画像#301 を相関法と時空間微分
法の組み合わせで解析した結果を基に,感度補正係数を決定して用いている.画像変形
パラメターのうち伸縮 YX , ,剪断 XY と回転 は分けて考え,伸縮および剪断は
2/1222 )( XYYX で一元的に取り扱うこととした.画像上で と は様々な組み合
わせで出現するが,これをそれぞれのパラメターの帯域に分けて誤差分布を示したのが,
Fig.B-1, B-2 である.Fig.B-1は,に対する誤差分布であり,図中赤線は回帰分析の結
果である.に対しては,回帰直線の傾きは 2.45~2.89 となり,サンプリング数を考慮
した重み付き平均は 2.85 となった.一方,Fig.B-2 は に対する誤差特性であるが,平
均的な回帰直線の傾きは 1.35 となった.これらの分析結果から, と に対する誤差
増大の感度比は 2.11となり,2:1と扱えば,両者は一元的に表せることがわかる.本文
第 4章の画像変形パラメターQの感度係数は,このようにして決定された.

- 102 -
Fig.B-1 Correlation between deformation speed of image and analysis error.
(a) 05.000.0 , (b) 10.005.0 , (c) 15.010.0 , (d) 20.015.0
Fig.B-2 Correlation between rotation speed of image and analysis error.
(a) 05.000.0 , (b) 10.005.0 , (c) 15.010.0 , (d) 20.015.0