-
8/3/2019 L5 Problem Solving n Search p4
1/30
241-320 Design Architecture and Engineeringfor Intelligent
System
Suntorn Witosurapot
Contact Address:Phone: 074 287369 or
Email: [email protected]
November 2009
-
8/3/2019 L5 Problem Solving n Search p4
2/30
Lecture 5:
Problem Solving and Search
part 4
Informed Search
-
8/3/2019 L5 Problem Solving n Search p4
3/30
241-320 Design Architecture &Engineering for Intelligent
System
Problem Solving and Search part 4 3
Overview
Heuristics
Informed Search Methods
Greedy Best-First Search
A Search
Iterative Deepening A Search
Local Search
Conclusion
-
8/3/2019 L5 Problem Solving n Search p4
4/30
241-320 Design Architecture &Engineering for Intelligent
System
Problem Solving and Search part 4 4
Local search algorithms
In many optimization problems, the path to the goal
isirrelevant; the goal state itself is the solution
State space = set of "complete" configurations
Find configuration satisfying constraints, e.g., n-queens
In such cases, we can use local search algorithms Keep a single
"current" state, try to improve it
(Ex:as in our part-2 slide, the Evaluation function should
be
lower and lower, when proceeding in each step)
-
8/3/2019 L5 Problem Solving n Search p4
5/30
241-320 Design Architecture &Engineering for Intelligent
System
Problem Solving and Search part 4 5
Example: n-queens
Put nqueens on an n nboard with no two queens onthe same row,
column, or diagonal
Note: The eight queens puzzle has 92 distinct solutions
[Ref] http://en.wikipedia.org/wiki/Eight_queens_puzzle
-
8/3/2019 L5 Problem Solving n Search p4
6/30
241-320 Design Architecture &Engineering for Intelligent
System
Problem Solving and Search part 4 6
Hill-climbing with Steepest Descent
It is a kind of local search algorithm.
Analogy: Imagine you have climbed a hill, but it hasgot dark
before you are back down. Your goal is thebottom of the hill. Your
problem is finding it. Youhave no GPS, so greedy search is not an
option.
You would make sure that every step you made tookyou down hill
and, ignoring cliffs, as steeply aspossible
-
8/3/2019 L5 Problem Solving n Search p4
7/30
241-320 Design Architecture &Engineering for Intelligent
System
Problem Solving and Search part 4 7
Hill-climbing with Steepest Descent
That is the fastest way to the bottom, unless: You are at the
bottom of a dip (M point), and every step you
might make takes you up hill
You are on a plateau (B region) and every step makes
nodifference
Objective function
Current stateState space
A
MB
Descenddirection
-
8/3/2019 L5 Problem Solving n Search p4
8/30
241-320 Design Architecture &Engineering for Intelligent
System
Problem Solving and Search part 4 8
Steepest Descent Search
Steepest descent searches are designed to take(you guessed it)
the steepest path down theevaluation function
The evaluation function equals zero at the goal andis positive
elsewhere
You actually dont need a goal, you could just betrying to
minimise the cost of something
Or reverse it all and try to maximise something
-
8/3/2019 L5 Problem Solving n Search p4
9/30
241-320 Design Architecture &Engineering for Intelligent
System
Problem Solving and Search part 4 9
Steepest Descent
1) S initial state
2) Repeat:
a) S arg minS
SUCCESSORS(S)
{h(S)}
b) if GOAL?(S) return S
c) if h(S) < h(S) then S S else return failure
-
8/3/2019 L5 Problem Solving n Search p4
10/30
241-320 Design Architecture &Engineering for Intelligent
System
Problem Solving and Search part 4 10
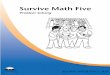
Application: 8-QueenRepeat n times:
1) Pick an initial state S at random with one queen in each
column2) Repeat k times:
a) If GOAL?(S) then return S
b) Pick an attacked queen Q at random
c) Move Q in its column to minimize the number of
attackingqueens new S [min-conflicts heuristic]
3) Return failure
1
2
3
3
2
2
3
2
2
2
2
2
0
2
-
8/3/2019 L5 Problem Solving n Search p4
11/30
241-320 Design Architecture &Engineering for Intelligent
System
Problem Solving and Search part 4 11
Application: 8-QueenRepeat n times:
1) Pick an initial state S at random with one queen in each
column2) Repeat k times:
a) If GOAL?(S) then return S
b) Pick an attacked queen Q at random
c) Move Q in its column to minimize the number of
attackingqueens new S [min-conflicts heuristic]
3) Return failure
1
2
3
3
2
2
3
2
2
2
2
2
0
2
Why does it work ???1) There are many goal states that are
well-distributed over the state space2) If no solution has been
found after a few
steps, its better to start it all over again.Building a search
tree would be much lessefficient because of the high
branchingfactor
3) Running time almost independent of thenumber of queens
-
8/3/2019 L5 Problem Solving n Search p4
12/30
-
8/3/2019 L5 Problem Solving n Search p4
13/30
241-320 Design Architecture &Engineering for Intelligent
System
Problem Solving and Search part 4 13
Steepest Descent Search(cont.)
Problem: depending on initial state, can get stuck inlocal
minima
Objective function
Current state Local minima global minima
State space
A
MB
Suppose we are at point A,and would like to be at point B,the
goal
Everything goes fine until weget to m, a local minimum.Then we
are stuck.
Descenddirection
-
8/3/2019 L5 Problem Solving n Search p4
14/30
241-320 Design Architecture &Engineering for Intelligent
System
Problem Solving and Search part 4 14
Simulated Annealing Search
Note: If youre curious, annealing refers to the process used
toharden metals by heating them to a high temperature
(hence,mealting) and then gradually cooling them
Idea: escape local maxima by allowing some "bad"moves but
gradually decrease their frequency
A
MB
Current stateBad moveGood move
-
8/3/2019 L5 Problem Solving n Search p4
15/30
241-320 Design Architecture &Engineering for Intelligent
System
Problem Solving and Search part 4 15
Simulated Annealing Search: No pain, no gain
x0 x1 x2
z(x)Allow non-improving moves sothat it is possible to go
down
x11x
4x5x6x7 x
8x9x10
x12x
13
x
in order to rise again
to reach global optimum
-
8/3/2019 L5 Problem Solving n Search p4
16/30
241-320 Design Architecture &Engineering for Intelligent
System
Problem Solving and Search part 4 16
Simulated Annealing
Improving moves always accepted Non-improving moves may be
accepted probabilistically
and in a manner depending on the temperature parameterT.
loosely
the worse the move the lesslikely it is to be accepted a
worsening move is less likely to be accepted, the cooler the
temperature
The temperature T starts high and is gradually cooled asthe
search progresses.
Initially (when things are hot) virtually anything is
accepted,at the end (when things are nearly frozen) only improving
moves
are allowed (and the search effectively reduces to
hill-climbing)
-
8/3/2019 L5 Problem Solving n Search p4
17/30
241-320 Design Architecture &Engineering for Intelligent
System
Problem Solving and Search part 4 17
Simulated Annealing Search
1) S initial state
2) Repeat:
a) S arg minS
SUCCESSORS(S)
{h(S)}
b) if GOAL?(S) return S
c) if h(S) < h(S) then S S
d) else with probability p
S S
This part is differentfrom hill-climbing
Q: How can we calculate p?
-
8/3/2019 L5 Problem Solving n Search p4
18/30
241-320 Design Architecture &Engineering for Intelligent
System Problem Solving and Search part 4 18
Setting p
What if p is too low?
We dont make many downhill moves and wemight not get out of many
local maxima
What if p is too high?
We may be making too many suboptimal moves
Should p be constant?
We might be making too many random moveswhen we are near the
global maximum
-
8/3/2019 L5 Problem Solving n Search p4
19/30
241-320 Design Architecture &Engineering for Intelligent
System Problem Solving and Search part 4 19
Setting p (cont.)
Decrease p as iterations progress
Accept more uphill moves early, accept fewer assearch goes
on
Intuition: as search progresses, we are movingtowards more
promising areas and quite likelytoward a global minimum
Decrease p as h(s) - h(s) increases
Accept fewer uphill moves if slope is high
See next slide for intutition
-
8/3/2019 L5 Problem Solving n Search p4
20/30
241-320 Design Architecture &Engineering for Intelligent
System Problem Solving and Search part 4 20
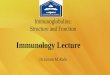
Decreasing p as h(S)-h(S) increases
h(S)-h(S) is large: weare likely moving towards
a sharp (interesting)minimum so dont moveuphill too much
h(S)-h(S) is small: we arelikely moving towards a
smooth (uninteresting)minimum so we want toescape this local
minimum
h(s)h(s)h(s)
h(s)
-
8/3/2019 L5 Problem Solving n Search p4
21/30
241-320 Design Architecture &Engineering for Intelligent
System Problem Solving and Search part 4 21
Complete Simulated Annealing SearchAlgorithm
1) S initial state
2) Iterate:
Repeat k times:
a) If GOAL?(S) then return S
b) S successor of S picked at random
c) if h(S)
h(S) then S
Sd) else
- h = h(S)-h(S)
- with probability ~ exp(h/T), where T is calledthe temperature,
do: S S
3) T = T
definitely accept the change
Else, accept the change with probability
When enough iterations have
passed without improvement,terminate.
Simulated annealing lowers T over the k iterations.It starts
with a large T and slowly decreases T
-
8/3/2019 L5 Problem Solving n Search p4
22/30
241-320 Design Architecture &Engineering for Intelligent
System Problem Solving and Search part 4 22
Simulated Annealing SearchAlgorithm (cont.)
Probability of moving downhillfor negative h values atdifferent
temperature ranges:
High temp: accept all moves
(Random Walk) Low temp: Stochastic Hill-Climbing
-
8/3/2019 L5 Problem Solving n Search p4
23/30
241-320 Design Architecture &Engineering for Intelligent
System Problem Solving and Search part 4 23
Convergence
If the schedule lowers T slowly enough, thealgorithm will find a
global optimum withprobability approaching 1
In practice, reaching the global optimumcould take an enormous
number of iterations
-
8/3/2019 L5 Problem Solving n Search p4
24/30
241-320 Design Architecture &Engineering for Intelligent
System Problem Solving and Search part 4 24
Very Basic Simulated Annealing Example
1 Do 400 trial moves
2 Do 400 trial moves
3 Do 400 trial moves
4 Do 400 trial moves
m Do 400 trial moves
100=T
95.0=TT
95.0=TT
95.0=TT
95.0=TT
00001.0=Tn Do 400 trial moves
95.0=TT
Iteration
-
8/3/2019 L5 Problem Solving n Search p4
25/30
241-320 Design Architecture &Engineering for Intelligent
System Problem Solving and Search part 4 25
Conclusion: Simulated annealing
Design of neighborhood is critical
Lots of parameters to tweak eg. , K, initial
temperature
Simulated annealing is usually better thanhillclimbing if you
can find the right
parameters
-
8/3/2019 L5 Problem Solving n Search p4
26/30
241-320 Design Architecture &Engineering for Intelligent
System Problem Solving and Search part 4 26
Parallel Local Search Techniques
They perform several local searchesconcurrently, but not
independently:
Beam search
Genetic algorithms(will be studied later)
-
8/3/2019 L5 Problem Solving n Search p4
27/30
241-320 Design Architecture &Engineering for Intelligent
System Problem Solving and Search part 4 27
Conclusion
Walking downhill is not as easy as youd think
Informed search algorithms try to move quicklytowards a goal
based on the distance metric from
their current point
Greedy search algorithms only follow paths searchspace that
bring them closest to the goal
Local search algorithms have no memory to storetree structures,
but work by intelligently coveringselected parts of search
space
-
8/3/2019 L5 Problem Solving n Search p4
28/30
241-320 Design Architecture &Engineering for Intelligent
System Problem Solving and Search part 4 28
Search problems
Blind search
Heuristic search:best-first and A*
Construction of heuristics Local searchVariants of A*
-
8/3/2019 L5 Problem Solving n Search p4
29/30
241-320 Design Architecture &Engineering for Intelligent
System Problem Solving and Search part 4 29
See Visualization of N-Queen Solutions
For viewing an live demo of N-Queens solutionalgorithms with
different algorithms, visit
http://yuval.bar-or.org/index.php?item=9
http://yuval.bar-or.org/index.php?item=9http://yuval.bar-or.org/index.php?item=9http://yuval.bar-or.org/index.php?item=9http://yuval.bar-or.org/index.php?item=9http://yuval.bar-or.org/index.php?item=9http://yuval.bar-or.org/index.php?item=9http://yuval.bar-or.org/index.php?item=9http://yuval.bar-or.org/index.php?item=9http://yuval.bar-or.org/index.php?item=9http://yuval.bar-or.org/index.php?item=9http://yuval.bar-or.org/index.php?item=9http://yuval.bar-or.org/index.php?item=9http://yuval.bar-or.org/index.php?item=9http://yuval.bar-or.org/index.php?item=9http://yuval.bar-or.org/index.php?item=9http://yuval.bar-or.org/index.php?item=9http://yuval.bar-or.org/index.php?item=9http://yuval.bar-or.org/index.php?item=9http://yuval.bar-or.org/index.php?item=9http://yuval.bar-or.org/index.php?item=9http://yuval.bar-or.org/index.php?item=9http://yuval.bar-or.org/index.php?item=9http://yuval.bar-or.org/index.php?item=9http://yuval.bar-or.org/index.php?item=9http://yuval.bar-or.org/index.php?item=9http://yuval.bar-or.org/index.php?item=9http://yuval.bar-or.org/index.php?item=9http://yuval.bar-or.org/index.php?item=9http://yuval.bar-or.org/index.php?item=9http://yuval.bar-or.org/index.php?item=9
-
8/3/2019 L5 Problem Solving n Search p4
30/30