Embed Size (px)
Citation preview

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
La Percezione nella RealtLa Percezione nella Realtàà VirtualeVirtuale
[email protected]://percro.sssup.it/~marcello/didattica.htm

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
LA REALTÀ
LA REALTÀ VIRTUALE
LA PERCEZIONE DEL TATTO
LE INTERFACCE TATTILI
OutlineOutline

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
I filosofi della Grecia classica avevano già scoperto l'imperfetta corrispondenza tra il mondo qual è e l'immagine di esso che i nostri sensi ci trasmettono.
I pitagorici compresero che le qualità che si rivelano ai sensi, i suoni, le immagini, le sensazioni tattili, erano nient'altro che apparenze sotto le quali la realtà, fissa e misurabile, può essere scoperta solo attraverso i numeri.
L’uomo è misura di tutte le cose, di quelle che sono in quanto sono e di quelle che non sono in quanto non sono.
Protagora di Abdera
L’Essere è, il Non Essere non è.Parmenide di Elea
La Percezione nella RV > La RealtLa Percezione nella RV > La Realtàà > La Percezione del mondo> La Percezione del mondo
La RealtLa Realtàà (Virtuale ?): La Percezione Del Mondo(Virtuale ?): La Percezione Del Mondo

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
“Da sempre, noi umani abbiamo avuto la possibilità (e l'impellente necessità) di arredare illusoriamente il mondo. E' superfluo ricordare, perché troppo ovvio, la nostra propensione a illuderci, a farci illusioni, sulla realtà, e su noi stessi, e a rendere irreale il reale, e viceversa. Mi riferisco, di preciso, alla nostra capacità affabulatoria, ossia alla nostra attitudine a generare illusioni e a credere (e far credere) che esse siano reali.”
La Percezione nella RV > La RealtLa Percezione nella RV > La Realtàà > La Dura Realt> La Dura Realtàà
Va rilevato che queste pratiche creative sono state sempre intimamente legate alla natura delle tecniche di produzione utilizzate. Nel campo, per esempio, delle rappresentazioni visive questo è più che evidente.
La RealtLa Realtàà: La Dura Realt: La Dura Realtàà

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
La capacità di immaginare, raffigurare e produrre mondi illusori è una delle caratteristiche più distintive della nostra specie: noi umani siamo prolifici facitori di mondi simbolici che svolgono un ruolo di mediazione tra noi e il mondo reale.
La Percezione nella RV > La RealtLa Percezione nella RV > La Realtàà > La Realt> La Realtàà RappresentataRappresentata
La RealtLa Realtàà (Virtuale ?): La Realt(Virtuale ?): La Realtàà RappresentataRappresentata

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
La Percezione nella RV > La RealtLa Percezione nella RV > La Realtàà > La Realt> La Realtàà RaccontataRaccontata
Antonello da Messina – S.Gerolamo nello studio (1474)
Narrazione per immagine, con artifici grafici, di un mondo illusorio, non reale.
Ruolo dell’autore e del fruitore
Lector in fabula
La RealtLa Realtàà (Virtuale ?): La Realt(Virtuale ?): La Realtàà RaccontataRaccontata

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
La Percezione nella RV > Il Senso di Presenza > La Percezione nella RV > Il Senso di Presenza > I Limiti della Percezione UmanaI Limiti della Percezione Umana
I LIMITI DELLA PERCEZIONE UMANA
Per imitare in maniera sempre più adeguata la realtà che ci circonda è essenziale conoscere a fondo i meccanismi della nostra percezione per imparare a sfruttarne anche i limiti.
Soltanto dopo aver compreso quanta parte del mondo esterno non viene affatto percepita dai nostri sensi è possibile selezionare le informazioni veramente necessarie per ottenere riproduzioni verosimili.
La realtà che conosciamo è condizionata dai nostri limiti fisiologici, se fossimo dotati di sensi più estesi avremmo una diversa immagine del mondo;
Tuttavia è su questi limiti che l'uomo ha basato le sue conoscenze e molti dei mezzi tecnici che ci permettono di ampliarle sono fondati proprio sullo sfruttamento dei limiti sensoriali.
La RealtLa Realtàà Virtuale: Il senso di presenzaVirtuale: Il senso di presenza

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
La Percezione nella RV > Il Senso di Presenza > La Percezione nella RV > Il Senso di Presenza > I Limiti della Percezione Umana /2 I Limiti della Percezione Umana /2
I LIMITI DELLA PERCEZIONE UMANA
La gamma sonora da noi percepita è ridotta rispetto a quella percepita dai cani o da altri animali quali i pipistrelli.
La nostra percezione visiva è fortemente condizionata: •la gamma cromatica è limitata sia inferiormente (l'occhio umano non è sensibile agli infrarossi), sia superiormente nella regione degli ultravioletti;
•non riusciamo a distinguere se un colore è frutto di una sola luce monocromatica (di quel colore) o somma di più luci (la cui somma di colori genera quello apparente);
•non riusciamo a percepire il movimento di oggetti, se questo è troppo veloce.
La realtà che conosciamo è condizionata dai nostri limiti fisiologici, se fossimo dotati di sensi più estesi avremmo una diversa immagine del mondo.
La RealtLa Realtàà Virtuale: Il senso di presenzaVirtuale: Il senso di presenza

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
I LIMITI DELLA PERCEZIONE UMANA
Il meccanismo della conoscenza di ciò che ci circonda è condizionato non solo dal funzionamento dei percettori, dei sensori di cui l'uomo dispone, ma anche dal "modello del mondo" che il cervello utilizza nell'interpretare i segnali che essi ci trasmettono.
Ad esempio:
una luce che si muove su una circonferenza viene vista, al disopra di una certa velocità di rotazione, come un cerchio luminoso continuo,
un'opportuna sequenza di note, la sequenza di Shepard, genera la sensazione di un suono di altezza sempre crescente.
Le illusioni ottiche e uditive sono molteplici e alcune tra esse sono comunemente e da tempo sfruttate: nel Trecento, Giotto introdusse la rappresentazione tridimensionale con la prospettiva.
La Percezione nella RV > Il Senso di Presenza > La Percezione nella RV > Il Senso di Presenza > I Limiti della Percezione Umana /3 > IllusioniI Limiti della Percezione Umana /3 > Illusioni
La RealtLa Realtàà Virtuale: Il senso di presenzaVirtuale: Il senso di presenza

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
La mente, sulla base delle informazioni trasmessegli dai sensi, costruisce una sua "realtàvirtuale".
Se il modello costruito è soddisfacente, l'uomo tende a confondere la realtà con il modello e assume questo come base per le sue azioni.
La Percezione nella RV > La Percezione nella RV > Il Senso di Presenza Il Senso di Presenza
La RealtLa Realtàà Virtuale: Il senso di presenzaVirtuale: Il senso di presenza

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
I LIMITI DELLA PERCEZIONE UMANA: ARTIFICI
Un modello soddisfacente (e longevo).
La simulazione della profondità con la prospettiva ha soddisfatto le nostre esigenze al punto che, prima di esplorare una modalità più completa della percezione della profondità, abbiamo dovuto attendere sette secoli.
Solo col cinema e la televisione stereoscopici si può pensare di sfruttare i fenomeni di persistenza retinica per simulare la visione binoculare attraverso immagini fornite sequenzialmente all’uno e all'altro occhio.
La Percezione nella RV > Il Senso di Presenza > I Limiti della PLa Percezione nella RV > Il Senso di Presenza > I Limiti della Percezione Umana ercezione Umana > Artifici> Artifici
La RealtLa Realtàà Virtuale: Il senso di presenzaVirtuale: Il senso di presenza

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
La Percezione nella RV > Il Senso di PresenzaLa Percezione nella RV > Il Senso di Presenza > Supporti tecnologici> Supporti tecnologici
Un modello soddisfacente (anche troppo).
La “stereovisione” tuttavia richiede ancora sistemi di interfaccia macchinosi e costosi.
Al di là della spettacolarità di materializzare oggetti al di fuori dello schermo, il vantaggio di una visione prospettica più realistica non è stato fino a oggi così intrigante, rispetto alla sensazione procurata dalla prospettiva, da convincere gli utenti a dotarsi di occhiali stereoscopici con la stessa facilità con cui sono stati indotti ad acquistare cuffie stereofoniche.
La RealtLa Realtàà Virtuale: Il senso di presenzaVirtuale: Il senso di presenza
I LIMITI DELLA PERCEZIONE UMANA: SUPPORTI TECNOLOGICI

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
La Percezione nella RV > Il Senso di Presenza La Percezione nella RV > Il Senso di Presenza > Ruolo attivo dell> Ruolo attivo dell’’osservatoreosservatore
I LIMITI DELLA PERCEZIONE UMANA: RUOLO ATTIVO DELL’OSSERCATORE
Un modello soddisfacente (anche troppo).
Particolarità della percezione visiva:
La selezione della scena della visione è una delle particolarità che trova nella vista il piùcomplesso ed evoluto dei nostri sensi anche se non il più difficile da ingannare con tecniche percettive.
Per alcuni studiosi, il compito principale della mente nella visione non è ricostruire le immagini a partire dagli stimoli che provengono dagli occhi ma scartare quegli stimoli che non risultano utili alla nostra sopravvivenza.
La RealtLa Realtàà Virtuale: Il senso di presenzaVirtuale: Il senso di presenza

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
La Percezione nella RV > Il Senso di Presenza La Percezione nella RV > Il Senso di Presenza > Ottimizzazione delle risorse> Ottimizzazione delle risorse
I LIMITI DELLA PERCEZIONE UMANA: OTTIMIZZAZIONE DELLE RISORSE
Scelta del minimo significante sufficiente
Il vantaggio dell'operazione consiste nel fatto che, per ciascuna delle forme elementari, sono noti i limiti percettivi.
E' quindi possibile scartare la parte dell'informazione non percepibile e operare successivamente la trasformazione inversa restituendo infine all'utente un'immagine depurata e adattata alla sue capacità visive.
L'esperienza dimostra che la gran parte delle cifre binarie che compongono l'informazione audio o video può essere scartata senza che l'utente se ne accorga pur mantenendo una qualità percepita superiore alla televisione analogica.
La RealtLa Realtàà Virtuale: Il senso di presenzaVirtuale: Il senso di presenza

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
La Percezione nella RV > Il Senso di Presenza La Percezione nella RV > Il Senso di Presenza > Il Multimediale> Il Multimediale
IL MULTIMEDIALE
Per poter coinvolgere lo spettatore in un simulacro di realtà che dalla realtà differisca solamente perché è in qualche modo controllata dall'uomo, occorre integrare la stimolazione di tutti i nostri sensi
La RealtLa Realtàà Virtuale: Il senso di presenzaVirtuale: Il senso di presenza

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
Percezione e sensiPercezione e sensi
La Percezione nella RV > La Percezione del Tatto La Percezione nella RV > La Percezione del Tatto > Peculiarit> Peculiaritàà del tattodel tatto

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
I comuni sensi ed il senso comuneI comuni sensi ed il senso comune
�� Gallia Gallia totatota divisa in divisa in partespartes trestres
�� I tre MoschettieriI tre Moschettieri�� I sette saviI sette savi�� I cinque sensiI cinque sensi
La Percezione nella RV La Percezione nella RV > La Percezione del Tatto> La Percezione del Tatto

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
Le peculiaritLe peculiaritàà del tattodel tatto
�� dove si esplica comunemente il tattodove si esplica comunemente il tatto
�� la pelle come limite ed interfacciala pelle come limite ed interfaccia
La Percezione nella RV > La Percezione del Tatto La Percezione nella RV > La Percezione del Tatto > Peculiarit> Peculiaritàà del tattodel tatto

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
La pelle: una descrizione sistematicaLa pelle: una descrizione sistematica
�� EpidermideEpidermide
�� DermaDerma
�� Tessuto sottocutaneoTessuto sottocutaneo
La Percezione nella RV > La Percezione del Tatto La Percezione nella RV > La Percezione del Tatto > Descrizione sistematica della pelle> Descrizione sistematica della pelle

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
La pelle: una descrizione sistematicaLa pelle: una descrizione sistematicaEpidermide (descrizione e sensori relativi)Epidermide (descrizione e sensori relativi)
�� Strato corneoStrato corneo
�� Corrispondenza fra i risalti delle Corrispondenza fra i risalti delle impronte digitali e le estroflessioni impronte digitali e le estroflessioni delldell’’epidermideepidermide
�� I corpuscoli di MeissnerI corpuscoli di Meissner
La Percezione nella RV > La Percezione del Tatto La Percezione nella RV > La Percezione del Tatto > Descrizione sistematica della pelle> Descrizione sistematica della pelle

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
La pelle: una descrizione sistematicaLa pelle: una descrizione sistematicaEpidermide (I corpuscoli di Meissner)Epidermide (I corpuscoli di Meissner)
�� Innervamento comuneInnervamento comune
�� Disposti Disposti ““ortogonalmenteortogonalmente”” alla alla superficiesuperficie
�� 43% dei sensori presenti nelle mani43% dei sensori presenti nelle mani
�� Dimensioni: 80x30 Dimensioni: 80x30 µµmm
�� Sensibili al contattoSensibili al contatto
�� Non saturanoNon saturano
�� Assenti in altre zone molto sensibili al Assenti in altre zone molto sensibili al tocco come le labbra o la linguatocco come le labbra o la lingua
La Percezione nella RV > La Percezione del Tatto La Percezione nella RV > La Percezione del Tatto > Descrizione sistematica della pelle> Descrizione sistematica della pelle

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
La pelle: una descrizione sistematicaLa pelle: una descrizione sistematicaEpidermide (I dischi di Merkel)Epidermide (I dischi di Merkel)
�� Innervamento comuneInnervamento comune
�� Disposti Disposti ““paralleliparalleli”” alla superficiealla superficie
�� 25% dei sensori presenti nelle mani25% dei sensori presenti nelle mani
�� Dimensioni: Dimensioni: ∼∼ 10 10 µµmm
�� Sensibili alla pressione ed alle Sensibili alla pressione ed alle vibrazionivibrazioni
�� 22--64 Hz64 Hz
�� Capaci di distinguere le forme al solo Capaci di distinguere le forme al solo contatto e di rilevare la rugositcontatto e di rilevare la rugositàà
La Percezione nella RV > La Percezione del Tatto La Percezione nella RV > La Percezione del Tatto > Descrizione sistematica della pelle> Descrizione sistematica della pelle

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
La pelle: una descrizione sistematicaLa pelle: una descrizione sistematicaEpidermide: Meccanismo di rilevazione dello scorrimentoEpidermide: Meccanismo di rilevazione dello scorrimento
�� UmiditUmiditàà della pelledella pelle�� Azioni tangenziali sul Azioni tangenziali sul
polpastrellopolpastrello�� Stick slipStick slip�� Comportamento delle impronte Comportamento delle impronte
digitalidigitali�� Effetti sulle strutture Effetti sulle strutture
sottostantisottostanti�� Vibrazioni e sensazione di Vibrazioni e sensazione di
scorrimentoscorrimento
La Percezione nella RV > La Percezione del Tatto La Percezione nella RV > La Percezione del Tatto > Descrizione sistematica della pelle> Descrizione sistematica della pelle

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
NellNell’’orecchioorecchio
Nei muscoliNei muscoli
Nelle giunzioni Nelle giunzioni articolariarticolari
Nella pelleNella pelle
LocalizzazioneLocalizzazione PropriocettiviPropriocettiviEsterocettiviEsterocettiviDenominazioneDenominazione
LabirinticiLabirintici
MuscolotendineiMuscolotendinei
ArticolariArticolari
CutaneiCutanei
Esterocezione: capacità di cogliere stimoli provenienti dall’esterno
Propriocezione: capacità di cogliere stimoli che si originano nell’interno di organi corporei
La Percezione nella RV > La Percezione del Tatto La Percezione nella RV > La Percezione del Tatto > Classificazione dei recettori tattili> Classificazione dei recettori tattili
Classificazione Classificazione topologicotopologico--funzionalefunzionale dei recettori tattilidei recettori tattili

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
Toccare (ed essere toccati)Toccare (ed essere toccati)
�� Toccare, urtare, subire un Toccare, urtare, subire un contattocontatto
�� Toccare, manipolare, cercare Toccare, manipolare, cercare un contattoun contatto
La Percezione nella RV > La Percezione del Tatto La Percezione nella RV > La Percezione del Tatto > Toccare ed essere toccati> Toccare ed essere toccati

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
Toccare (ed essere toccati)Toccare (ed essere toccati)AttivitAttivitàà e passivite passivitàà
�� Toccare come esplorare: non ci si limita a registrare un contattToccare come esplorare: non ci si limita a registrare un contattoo
�� Subire un contatto: registrazione della risposta dei sensoriSubire un contatto: registrazione della risposta dei sensori
La Percezione nella RV > La Percezione del Tatto La Percezione nella RV > La Percezione del Tatto > Toccare ed essere toccati> Toccare ed essere toccati

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
Toccare (ed essere toccati)Toccare (ed essere toccati)La complessitLa complessitàà della percezionedella percezione
�� Dal punto di vista del sensore non cDal punto di vista del sensore non c’è’è differenza fra toccare ed essere differenza fra toccare ed essere toccatitoccati
�� NecessitNecessitàà di ulteriori significanti che permettano di differenziare le di ulteriori significanti che permettano di differenziare le esperienzeesperienze
La Percezione nella RV > La Percezione del Tatto La Percezione nella RV > La Percezione del Tatto > Toccare ed essere toccati> Toccare ed essere toccati

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
�� ToccareToccare Essere Toccati
La differenza sostanziale è nella mente del soggetto: questi si dispone a ricevere informazioni tattili aprendo determinati canali sensoriali
Sensori Sensori propriocettivipropriocettiviraramente coinvoltiraramente coinvolti
Abilitazione del canale Abilitazione del canale sensorio sensorio esterocettivoesterocettivo
Eccitazione dei sensori Eccitazione dei sensori esterocettiviesterocettivi
Coinvolgimento dei sensori Coinvolgimento dei sensori proprio ed proprio ed esterocettiviesterocettivi
Condizione passivaCondizione passivaCondizione attivaCondizione attiva
Toccare (ed essere toccati)Toccare (ed essere toccati)La complessitLa complessitàà della percezionedella percezione
�� Essere toccatiEssere toccati

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
Due approcci allo studio della percezione tattileDue approcci allo studio della percezione tattile
�� MeccanicisticoMeccanicistico
�� Cognitivo (teoria della Gestalt)Cognitivo (teoria della Gestalt)
La percezione nella RealtLa percezione nella Realtàà VitualeVituale
Della sensazione veridicaDella sensazione veridica
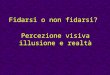
� Una sensazione affidabile è una sensazione complessa
� Niki Lauda vs. San Tommaso: Iconoclastia ed esperienze aptiche ante litteram
� Una comunissima interfaccia aptica: il sedile dell’automobile
“Se non vedo (…) e non metto il mio dito (…) e non metto la mia mano (…) certamente non crederò.”Giovanni, 20 - XXV

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
Interfacce tattiliInterfacce tattili

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
La Percezione nella RV > Le Interfacce Tattili >La Percezione nella RV > Le Interfacce Tattili > WearableWearable DisplayDisplay
Le Interfacce Tattili indossabiliLe Interfacce Tattili indossabili

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
Jungmann & Schlaak, Darmstadt Univ.
Le Interfacce Tattili: Le Interfacce Tattili: indenterindenter
La Percezione nella RV > Le Interfacce Tattili > Desktop DisplayLa Percezione nella RV > Le Interfacce Tattili > Desktop Display > > IndenterIndenter

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
Ultra Thin Electrostatic ActuatorYamamoto, Ishii et al.
Le Interfacce Tattili desktop: tessitura superficialeLe Interfacce Tattili desktop: tessitura superficiale
La Percezione nella RV > Le Interfacce Tattili > Desktop DisplayLa Percezione nella RV > Le Interfacce Tattili > Desktop Display > Tessitura superficiale> Tessitura superficiale

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
La Percezione nella RV > La Percezione del Tatto La Percezione nella RV > La Percezione del Tatto > Il display tattile di > Il display tattile di HaywardHayward
Il display tattile di Il display tattile di HaywardHayward

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
Il display tattile di Il display tattile di HaywardHayward: principio di funzionamento: principio di funzionamento
La Percezione nella RV > La Percezione del Tatto La Percezione nella RV > La Percezione del Tatto > Il display tattile di > Il display tattile di HaywardHayward

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
Super Cilia Skin
MIT MediaLab
Display tattili alternativi: Display tattili alternativi: SuperCiliaSuperCilia SkinSkin ((““emotionalemotional”” devicedevice))
La Percezione nella RV > La Percezione del Tatto La Percezione nella RV > La Percezione del Tatto > > SuperCiliaSuperCilia SkinSkin

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
La Percezione nella RV > La Percezione del Tatto > La Percezione nella RV > La Percezione del Tatto > Dispositivi in commercioDispositivi in commercio
Dispositivi Commerciali: Dispositivi Commerciali: CyberGraspCyberGrasp//TouchTouch//GloveGlove
http://www.immersion.com/3d/products/cyber_glove.php
http://www.mindflux.com.au/products/vti/cybertouch.html
Attenzione! Ciò che Attenzione! Ciò che èè definito definito ““tattiletattile”” non sempre lo non sempre lo è…è…

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
Una proposta per un attuatore tattileUna proposta per un attuatore tattile

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
�� Stimolazione dei polpastrelli e del Stimolazione dei polpastrelli e del palmopalmo
�� Simulazione della percezione di Simulazione della percezione di caratteristiche geometriche e caratteristiche geometriche e meccanichemeccaniche della superficiedella superficie
�� Simulazione della percezione di Simulazione della percezione di contatti contatti statici e dinamicistatici e dinamici
�� Possibile Possibile integrazione con integrazione con unun’’interfaccia aptica interfaccia aptica cinesteticacinestetica
SPECIFICHE UTENTE
La Percezione nella RV > La Percezione del Tatto > 3podLa Percezione nella RV > La Percezione del Tatto > 3pod > specifiche utente> specifiche utente

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
LL’’illusione aptica di illusione aptica di HaywardHayward
�� ÈÈ possibile indurre la percezione di uno possibile indurre la percezione di uno spostamento normale alla superficie di spostamento normale alla superficie di contatto tramite deformazioni tangenzialicontatto tramite deformazioni tangenziali
La Percezione nella RV > La Percezione del Tatto > 3podLa Percezione nella RV > La Percezione del Tatto > 3pod > background> background

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
Attuatore di Attuatore di HaywardHayward
Lo spostamento prodotto dagli elementi attivi verticali produce la rotazione alla base dell’aculeo, la quale genera la deformazione tangenziale avvertita dalla pelle dell’utente.
PROPRO
•Semplice realizzazione
•Elevata banda passante
CONTROCONTRO
•Elevato ingombro verticale
•Dipendenza fra ingombro verticale e deformazione massima ottenibile
•Impossibilità di simulare uno scorrimento continuo
Vista laterale
Vista in pianta
La Percezione nella RV > La Percezione del Tatto > Attuatori TatLa Percezione nella RV > La Percezione del Tatto > Attuatori Tattili > 3podtili > 3pod > > pro&conspro&cons

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
Motori piezoelettrici
Rotazione della sfera ottenuta tramite l’azione di un piattello il cui moto risulta essere la combinazione di due vibrazioni isofrequenziali di Bouncing e Bending opportunamente sfasate nel tempo
Le vibrazioni di Bouncing e Bending sono ottenute tramite eccitazione alla risonanza di due modi propri di vibrare di un’opportuna struttura meccanica.
Con piccoli segnali eccitatori si ottengono ampiezze di vibrazione relativamente grandi
Sono stati già realizzati analoghi motoripiezoelettrici che però non sono adatti, per dimensioni e configurazione, all’implementazione in un attuatoretattile

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
Casi studio: applicazioni e progettiCasi studio: applicazioni e progetti
La percezione nella RealtLa percezione nella Realtàà VitualeVituale
Progetto UE finalizzato alla realizzazione della presenza in ambienti di realtà mista su larga scala.L’ambiente includerà un’installazione fisica che gli utenti potranno visitare sia fisicamente che virtualmente.
Presenccia
La percezione nella RealtLa percezione nella Realtàà VitualeVituale
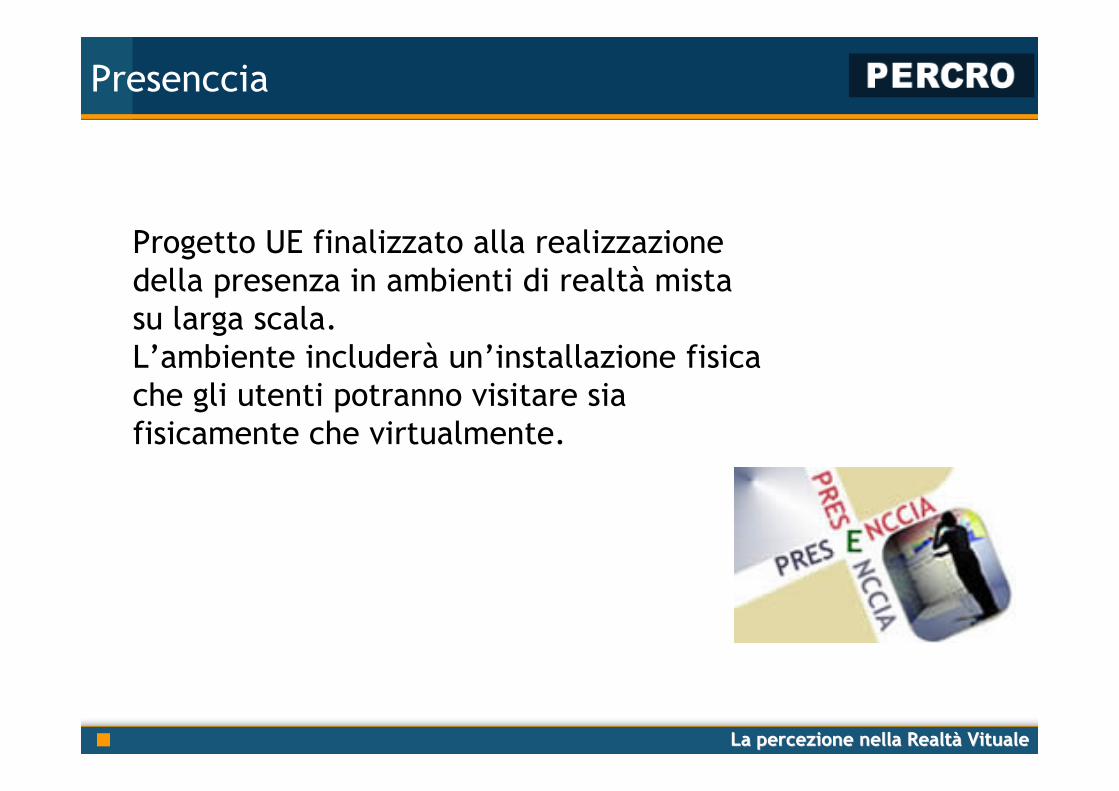
The PERCRO Data Glove (R.4)
based on innovative sensor composed by a flexible carrier and a low cost commercial
Hall Effect Sensor.
Data Glove
Presenccia
The PERCRO Data Glove (R.1)
PERCRO has a long experience in the development of Data Glove.The first Data Glove for acquisition of the posture of the fingers was developed in 1992.
based on strain gauges technology mounted on steel leafs.

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
Natural touch and gestureNatural touch and gesture
Application
Presenccia

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
FingerPadStimulator
attuatore tattile elettroattivo
Un attuatore innovativo che utilizza polimeri elettroattivi e metafore di contatto per stimolare aree sensibili della mano in applicazioni di Realtà Virtuale
Presenccia

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
HAPTEX is a research project on multimodal perceptionof textiles in virtual environments. Its main goal is todevelop a complete Virtual Reality System for visuo-haptic interaction with virtual textiles.
HapTex

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
The HAPTEX System will display a realistic 3D representation of the simulated virtualtextile. Users of the system will be able to “feel” the displayed virtual textile through a novel haptic/tactile interface. The project will provide several demonstrators to test different integration phases of the overall system.
HapTex

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
Goals• Fundamental research in the haptics domain• Integration of force feedback & tactile perception• Physical simulation of textiles in real time• Synchronization of visual and haptic rendering
R e s e a r c h• Mechanical models for physical-basedsimulation in real-time• From physical parameters torealisticvisualization and haptic perceptionof textiles• Haptic rendering algorithms• Novel haptic interfaces for multi-point interaction
A p p l i c a t i o n s• Online-purchase of clothes• Entertainment - and textileindustry• Simulations with integrated haptic feedback
HapTex

La percezione nella RealtLa percezione nella Realtàà VitualeVituale
The Pinch is an under actuated multi-dofhaptic interface. This device is capable of exerting force between thumb and index and middle finger allowing to simulate “Precision Grasping”.
Pinch
Portable HIs
This device is an Encountered Type HI. A small plate, whose orientation is controlled thanks to a 2DoF wrist, gets in contact with the finger only when the virtual surface is touched.
Fingertip