Embed Size (px)
Citation preview

8/11/2019 Lc 3b Project
http://slidepdf.com/reader/full/lc-3b-project 1/11
NC State University ECE 406 Spring 2009ECE Department Design of Complex Digital Systems W. Rhett Davis
Project #1: LC3 Microcontroller
1. Introduction
The main purpose of this project is to let you start dealing with more complex designs, and
become familiar with some of the elements used within a CPU.
2. Learning Objectives
Complete a design involving separate control and datapath with multiple modules
Complete a design that includes most of the elements to be used in the CPU
3. Project Report
You are expected to turn in a report after the end of this project. Follow the project report format
given on the Laboratories page on the course web-site. Be sure to include all items listed in that
report format for full credit.
4. Wolfware SubmissionYou also need to submit your Verilog code electronically through Wolfware as proj1.v. Thisfile should contain a module called SimpleLC3, as described below. It may use the ‘include
directive to include other files, if you wish, but they must also be submitted with Wolfware.
Your code must successfully execute with the test-bench provided on the course web-site (called
proj1test.v) and give the correct expected output as listed in the test-bench. The memory file(proj1.dat) is also given, along with the expected output of the instruction set simulator
(proj1.out). This program is taken from the example given in class. In addition, a second
program will be used to test your code that will not be provided.
5. Lab Design: simplified LC3 microcontroller
The microcontroller designed in this lab assignment is a simplified version of the original LC3microcontroller. Specifically, four simplifications are considered as follows:
1) A smaller instruction set: the ISA you need to implement does NOT contain the controlinstructions RTI and TRAP. All other instructions must be implemented.
2) No off-chip memory: The instructions of the program are assumed to be in the cache.
3) The programs consist of valid instructions ONLY, i.e., you do not have to perform errorchecking to detect bad instructions
4) No overflow detection is required.
5.1 Top-level module:
modul e Si mpl eLC3( cl ock, r eset , addr , di n, dout , r d, compl et e) ;i nput cl ock; / / Gl obal syst em cl ocki nput r eset ; / / Gl obal syst em r esetout put [ 15: 0] addr , di n; / / Addr ess and Dat a- I n l i nes f or Memor yi nput [ 15: 0] dout ; / / Dat a- Out l i nes f r omMemor yout put r d; / / Memr oy si gnal t o i ndi cat e r ead or wr i t ei nput compl et e; / / Si gnal t o i ndi cat e compl et i on of r ead/ wr i t e

8/11/2019 Lc 3b Project
http://slidepdf.com/reader/full/lc-3b-project 2/11
NC State University ECE 406 Spring 2009ECE Department Design of Complex Digital Systems W. Rhett Davis
SimpleLC3 Schematic
s h a r e d a d d r e s s b u s
s h a r e d r e a d l i n e

8/11/2019 Lc 3b Project
http://slidepdf.com/reader/full/lc-3b-project 3/11
NC State University ECE 406 Spring 2009ECE Department Design of Complex Digital Systems W. Rhett Davis
As shown in the schematic on the previous page, the top-level module is instantiated in the test-
bench along with the memory.
Special Signals:
The SimpleLC3 module should be connected exactly as shown in the schematic. Note that there
is a shared read-line and a shared address-bus for the memory, which means that these signalswill be driven from two sources. In addition, note that VSR2 field (which in this schematic is
the least significant 16 bits of the the D_Data signal to the Execute block) goes into the
MemAccess block as the M_Data signal. All other signals are simple inputs and outputs.
The specifications for the Controller, Fetch and Execute blocks were given in Homeworks #5,
and #6. The specifications for the remaining 3 blocks are given here.
5.2 Controller
modul e Cont r ol l er ( cl ock, r eset , st at e, C_Cont r ol , compl et e) ;i nput cl ock, r eset ; / / syst em cl ock and r eset
out put [ 3: 0] state; / / system stat ei nput [ 6: 0] C_Cont r ol ; / / cont r ol f r om Decodei nput compl ete; / / compl ete f r omMemory
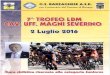
The Controller module is a finite state machine that controls the dataflow and therefore theexecution of all the instructions in the microcontroller. The state transition diagram sketch is
given below, in which the vertices represents states with the corresponding operations described
inside. The transitions are denoted by the edges. The condition of each transition is determined by the current state and/or input signal C_Control generated by the decoder module. The
C_Control can be broken down further into 4 fields as follows.
The self-pointing edges are used for Project 2 to cope with the memory latency. Such loopingtransitions only occur when the complete signal is zero, which never happens in Project 1. State
transitions occur and only occur at positive edges of the clock signal. When the reset signal is
high, the next-state should be the “Fetch Instruction” state.

8/11/2019 Lc 3b Project
http://slidepdf.com/reader/full/lc-3b-project 4/11
NC State University ECE 406 Spring 2009ECE Department Design of Complex Digital Systems W. Rhett Davis
Update
PC
Compute
Memory
Address
Fetch
Instruction Decode
Write
Memory
Execute
ALU
Operations
Compute
Target PC
Update
Register
File
Indirect
Address
ReadRead
Memory
complete==0
complete==0
complete==0
Instruction
Type==0
Instruction
Type==1
Instruction
Type==2
Invalid
State
Store PC==0
Store PC==1
Memory Access
Mode==3
Memory Access
Mode==2
complete==0
Memory Access
Mode==0Memory Access
Mode==1
Load==1
Load==0
complete==1
complete==1
complete==1
5.3 Fetch
modul e Fet ch( cl ock, r eset , st at e, pc, npc, r d, t addr , br _t aken) ;i nput cl ock; / / systemcl ocki nput r eset ; / / systemr eseti nput br _t aken; / / si gnal f r omdecoder , 1 means br anch t akeni nput [ 15: 0] t addr ; / / t ar get addr ess of cont r ol i nst r ucti onsi nput [ 3: 0] stat e; / / system stat e f romcont rol l erout put [ 15: 0] pc, npc; / / cur r ent PC and next PC, i . e. , pc+1out put r d; / / memory r ead cont r ol si gnal
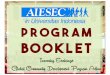
Fetch module is used to generate the program counter, which contains the address of the
instruction to be fetched. The PC should be updated on the rising edge of the clock. Also, the PC
should be updated only when the system is in the “Update PC” state, as determined by theController block. The signal rd should be high-impedance during the “Read Memory”, “Write
Memory”, and “Indirect Address Read” states, because the MemAccess block will drive theshared memory bus during these cycles. In all other states, this signal should be high. pc is the
memory address and should be high-impedance at the same times that rd is high-impedance. The
first program instruction is located at the address 16’h3000. Therefore, pc should be set to
16’h3000 when reset is high. The block diagram of Fetch module is shown below.

8/11/2019 Lc 3b Project
http://slidepdf.com/reader/full/lc-3b-project 5/11
NC State University ECE 406 Spring 2009ECE Department Design of Complex Digital Systems W. Rhett Davis
br_taken
16'h3000
reset
PC
clock
+ npc
pc
1
state ==
Update PC
0
1
taddr
rd1
state
state != Read Memory &&
state != Write Memory &&
state != Indirect Address Read
1
0
1
0
The relation among Fetch, Controller, and off-chip memory module is shown below.
clock
complete
state[3:0]
C_Control[5:0]
reset
Controller
clock
reset
state[3:0]
pc[15:0]
npc[15:0]
rd
taddr[15:0]
br_taken
Fetch
clock
addr[15:0] dout[15:0]
complete
din[15:0]
rd
Memory
global reset
global clock
global reset
global clock
global
clock
to Writeback
& Execute
from MemAccess
from Execute
from Execute
from Decode
to MemAccess
& Decode

8/11/2019 Lc 3b Project
http://slidepdf.com/reader/full/lc-3b-project 6/11
NC State University ECE 406 Spring 2009ECE Department Design of Complex Digital Systems W. Rhett Davis
5.4 Execute
modul e Execut e( E_cont r ol , D_dat a, al uout , pcout , npc) ;
i nput [ 5: 0] E_cont r ol ; / / cont r ol si gnal s f r om Decodei nput [ 47: 0] D_dat a; / / dat a f r omDecode
out put [ 15: 0] al uout ; / / out put of ALUout put [ 15: 0] pcout ; / / out put of t he addr ess comput at i on adderi nput [ 15: 0] npc; / / next PC f r om Fet ch
Execute module performs the arithmetic and logical instructions, target PC computation, andmemory address computation. The E_Control input is an aggregate of the ALU Operation Sel,
OP 2 Sel, PC Sel 1, and PC Sel 2. The D_Data input is an aggregate of the IR, VSR1 andVSR2 signals. The block diagram is given below with the ALU and extension modules in
homework 3. Note that overflow checking is not being done, so the alucarry output of the ALU
is ignored.
E_Control
012345
ALUOperation Sel
PC Sel 1PC
Sel 2OP 2Sel
VSR1 VSR2IR
3247 ... 1631 ... 015 ...
D_Data

8/11/2019 Lc 3b Project
http://slidepdf.com/reader/full/lc-3b-project 7/11
NC State University ECE 406 Spring 2009ECE Department Design of Complex Digital Systems W. Rhett Davis
5.5 MemAccess
modul e MemAccess( st ate, M_Cont r ol , M_Data, M_Addr, memout , addr, di n, dout, r d);i nput [ 3: 0] state; / / SystemSt at e f romCont rol l eri nput M_Cont r ol ; / / Cont r ol Si gnal t o i ndi cat e addr ess f r om dout
i nput [ 15: 0] M_Dat a; / / Dat a f or st or e oper at i onsi nput [ 15: 0] M_Addr ; / / Addr ess f or l oad/ st or e oper at i onsout put [ 15: 0] addr ; / / Addr ess l i nes t o memoryout put [ 15: 0] di n; / / Dat a- i n l i nes t o memoryout put r d; / / Memory si gnal t o i ndi cat e r ead or wr i t ei nput [ 15: 0] dout ; / / Dat a- Out l i nes f r omMemoryout put [ 15: 0] memout ; / / Dat a r ead f r omMemory t o wr i t e i n r egi st er f i l e
The MemAccess block is the master of the shared memory bus during the Read Memory, Write
Memory, and Read Indirect Address states. It should setup the memory bus lines as follows:
• Read Memory – rd should be 1 and din doesn’t matter. addr should be set to eitherM_Addr or dout, depending on M_Control. addr should be set to dout in this state
only if the opcode shows an LDI operation.
• Write Memory – rd should be 0 and din should be M_Data. addr should be set to eitherM_Addr or dout, depending on M_Control. addr should be set to dout in this stateonly if the opcode shows an STI operation.
• Read Indirect Address - rd should be 1 and din doesn’t matter. addr should be set toM_Addr.
The memout signal should always pass the value of dout through to the Writeback block.
5.6 Writeback
modul e Wr i t eback( W_Cont r ol , al uout , memout , pcout , npc, DR_i n) ;i nput [ 15: 0] al uout , memout , pcout , npc; / / Possi bl e dat a t o st or ei nput [ 1: 0] W_Cont r ol ; / / Cont r ol si gnal t o choose what wi l l be wr i t t enout put [ 15: 0] DR_i n; / / Dat a t hat wi l l be st or ed i n t he r egi st er - f i l e
The Writeback block should set the DR_in lines to the value to be written into the register-file.
This value is selected from the following four choices:
• aluout – The output of the ALU in the Execute block
• pcout – The computed memory address output of the Execute block
• npc – The next value of the program counter from the Fetch block
• memout – The value read from memory, from the MemAccess block
The W_Control signal will be used to select between these possibilities. The schematic isshown below.

8/11/2019 Lc 3b Project
http://slidepdf.com/reader/full/lc-3b-project 8/11
NC State University ECE 406 Spring 2009ECE Department Design of Complex Digital Systems W. Rhett Davis
aluout[15:0]
pcout[15:0]
npc[15:0]
memout[15:0]
W_Control[1:0]
DR_in[15:0]
5.7 Decode
modul e Decode( cl ock, st at e, dout , C_Cont r ol , E_Cont r ol ,M_Cont r ol , W_Cont r ol , F_Cont r ol , D_Dat a, DR_i n) ;
i nput cl ock; / / Gl obal syst em cl ocki nput [ 3: 0] state; / / System stat e f r om Cont r ol l eri nput [ 15: 0] dout ; / / Dat a- out l i nes f r om Memor yi nput [ 15: 0] DR_i n; / / Dat a t o be wr i t t en t o Regi st er - Fi l eout put M_Cont r ol ; / / MemAccess cont r ol l i neout put [ 1: 0] W_Cont r ol ; / / Wr i t eback cont r ol l i nesout put [5: 0] C_Cont r ol ; / / Cont r ol l er cont r ol l i nesout put [ 5: 0] E_Cont r ol ; / / Execut e cont r ol l i nesout put [47: 0] D_Data; / / Data f or Execut e and MemAccess bl ocksout put F_Cont r ol ; / / Fet ch cont r ol l i ne
The Decode block contains the logic illustrated in the schematic below. It contains aninstruction register (IR) that stores the current instruction during the Decode state. It contains a
program status register (PSR) that stores the status of the last value written to the register file
(positive, negative, or zero) and is update only on the Update Register File state. Lastly, it
contains a register file that can read two locations on one cycle and write to one location in thesame cycle. However, the register file writes only during the Update Register File state.
Based on the contents of IR and PSR, the decode block generates all of the control signals for theother blocks (C_Control, M_Control, W_Control, E_Control, and F_Control) as well as the
source and destination addresses in the register file (sr1, sr2, and dr). Note, however, that the
“instruction type” field of the C_Control signal must be valid during the Decode state and willtherefore not be valid if this field is computed from the contents of IR. Therefore, the
“instruction type” field is computed from the memory output, which makes it valid during the
Decode state (but not necessarily the states after Decode).

8/11/2019 Lc 3b Project
http://slidepdf.com/reader/full/lc-3b-project 9/11
NC State University ECE 406 Spring 2009ECE Department Design of Complex Digital Systems W. Rhett Davis
W_Control[1:0]M_Control
E_Control[5:0]
D_Data[47:0]
dout[15:0]
F_Control
C_Control[5:0]
DR_in[15:0]
state[3:0]==”Update
Register File”
sr1[2:0]
sr2[2:0]
dr[2:0]
VSR1[15:0]
VSR2[15:0]
en
DR_in[15:0]
RegFile
P S R
I R
PSR update
logic
[15:0]
[31:16]
[47:32]
Main
decode
logic
[3:0]
Instruction Type
decode logic
[5:4]
state[3:0]
==”Decode” en
en==”Update
Register File”
When writing the Verilog code for the main decode combinational logic, it is helpful to first
create a table that has the values needed for each control signal in order to set up the micro-controller to implement each operation. Empty tables are provided below for your convenience.
C_ControlOperation Mode Instr. Type Store PC Mem. Access Mode load M_Control
ADD 01
AND 01
NOTBR
JMP/RETJSRJSRR
LDLDRLDILEA
STSTRSTI

8/11/2019 Lc 3b Project
http://slidepdf.com/reader/full/lc-3b-project 10/11
NC State University ECE 406 Spring 2009ECE Department Design of Complex Digital Systems W. Rhett Davis
E_ControlOperation Mode ALU Op Sel PC Sel 1 PC Sel 2 Op 2 Sel W_Control F_Control
ADD 01
AND 01
NOTBRJMP/RETJSRJSRR
LDLDRLDILEA
STSTRSTI
Operation Mode DR SR1 SR2
ADD 01
AND 01
NOT
BRJMP/RETJSRJSRR
LDLDR
LDILEA
STSTRSTI
The RegFile block inside the Decode block can be conceptually thought of as the schematic
below. In the schematic, the outputs of eight 16-bit registers fan-out to two 8-to-1 MUXes,
which are used to determine the VSR1 and VSR2 signals, depending on the sr1 and sr2 select
lines. The DR_in input fans-out to the data-inputs of all eight registers. Each register has anenable input that determines if it will load the input value, and these enable inputs are connected
to a 1-to-8 decoder that passes the master enable signal to one register, depending on the dr input.

8/11/2019 Lc 3b Project
http://slidepdf.com/reader/full/lc-3b-project 11/11
NC State University ECE 406 Spring 2009ECE Department Design of Complex Digital Systems W. Rhett Davis
You may want to implement the RegFile with a memory, rather than eight individual registers.
The code will be much simpler and easy to understand. However, the waveform capture formats
typically don’t store the values in memories. If you want to view the contents of your register
file in a waveform viewer, you may want to have a set of eight assign statements, such as thefollowing:
assi gn R0=mem[ 0] ;assi gn R1=mem[ 1] ;. . .
This approach will not affect your synthesis results. You should still get 16×8=128 flip-flops
when synthesizing.