Embed Size (px)
Citation preview



Pickoff
Pre-StabilizedLaser
BeamSplitterInnolight
PROMETHEUS
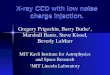
Aso configuration for LCGT green locking2011-11-04
Arm CavityL=3000m
ServoFilterfor PLL
ResonantEOM
AOMfor freq. shift
Pickoff
PD forIRarm lockPD for
PLL
LO forgreen
arm lock
testmass
actuator
PD forgreenarm lock
LO forIRarm lock
PickoffPR2orSR2
InputTestMass
EndTestMass
IR=1064nm
Green=532nm
Ctrloffsetfreq.
1
2
3
45 phase
comparator
6
7
Figure 1: Green Lock configuration for LCGT


SHGNoise
+-
+-
FGR
AAOM
AMASS
AOMfor freq. shift
End testmass actuator
Green Lock
FMASSlow freq.
+-
CGR DGR
Demod_GRArm cavity Pole
feedback point
feedback point
GreenShotNoise
PDH_GR
+-
foffset f->phi
FPZTAPZT
Volt->Hz
FTHRATHR
Volt->Hz
PLL for PSL
PLLShotNoise
Beam combiner
x2
SHG
feedback point
+-
Arm cavity for IR
ArmShotNoise
comparator
f->phi
f->phi
fcav
fPSL
fcav_FR
arm cavityseismic noise
fPSL
Pre-StabilizedLaser
phasecomparator
fGR
DPLL
Hz->m
low freq.
high freq.
fIR err
fPLL_err
fGR_s
fGR_err
fcav
+-
InnolightPROMETHEUS
fIR_FR
--+
fcav_GR
x2
fcav
fIR
1064nmFree Run
VoltageContorl
Oscillator
VCOPhaseNoise
AVCO
fVCO
FGR_1high freq.
fIR
Hz2m



3 2
1.f_IR
phasecomparator
gain
-K-
phasecomparator
feedbackpointof PLL
f->phi 3
2*pi
s
f->phi 2
2*pi
s
f->phi 1
2*pi
s
add 2
add 1F_PZT
zeros(s)
s 2
Beamcombiber
A_PZT
-K-
5
4
3
2.f_IR_FR
1.f_PSL
f_IR
f_IR
f_PSL
f_IR_FR
Simulink Model of PLL part
foffset
fPSL
fIR FR
fIR

[[ Each components ]]
Phase comparator
= 1 V /rad(see LCGT wiki : http://gwwiki.icrr.u-tokyo.ac.jp/JGWwiki/LCGT/subgroup/ifo/ISC/TaskList/LockAcquisition)
Innolight PROMTHEUS: PZT actuator
= 2 MHz /V** catalogue spec.
Servo filter for PZT loop (One zero version)
servo gain @DC = 0.01
zero freq. (1) = 10 kHz
zero freq. (2) = 0 Hz
Servo filter for PZT loop (Two zero version)
servo gain @DC = 0.01
zero freq. (1) = 5 kHz
zero freq. (2) = 5 kHz

100
105
1010
1015
Mag(dB)
PLL - Open Loop TF
10-1
100
101
102
103
104
105
106
-180
-135
-90
-45
0
45
90
135
180
Frequency (Hz)
Phase(deg)
UGF = 20kHz
f-3
f-2
G = 5e+11
G = 2e+8
Phase margin= 60 deg.
Two zero version
One zero version

[[ Noise Response to fIR ]]
OTF = openloop transfer function
* f_{IR FR} In(2) --> Out(1)
OTF = 1 / (1+G)f < UGF OTF = 1/Gf > UGF OTF = 1
* f_{offset} In(5) --> Out(1)
OTF = G / (1+G)f < UGF OTF = 1f > UGF OTF = G
* f_{PSL} In(1) --> Out(1)
same as LO, but the sign is flopped.
* Shot noise (PLL) In(4) --> Out(1)
LO "f-->phi"OTF = G / (1+G) * f
* Servo Electronics Noise (PLL) In(3) --> Out(1)
Shot noise "phase comparator gain", "phase comparator gain" = 1 shot noise OTF

10
10
10
10
10
10
10
-6
-4
-2
0
2
4
6
Magnitude
Freq noise coupling to fIR
10 10 10 10 10 10 10 10-1 0 1 2 3 4 5 6-180
-135
-90
-45
0
45
90
135
180
Frequency (Hz)
Phase(deg)
Shot noise
Servo Elec.
f PSL
f+1
UGF = 20kHz
1Hz
1+G1 1+G
Gf+3
f-1
1+GG
x f
f IR FRf offset

[[ Amount of noise source estimation ]]
* Shot noise of the phase comparator
= 2.5e-8 rad/sqrt(Hz)Wiki =>
* Servo Electric noise
= 100 nV/sqrt(Hz)
PZT loop UGF = 20 kHz
100 nV worst case
* Frequency noise of the laser free-run
= 1.0e+4 / f Hz/sqrt(Hz)
* Local Oscillator freq. noise
** Agilent E8663D-UNX catalogue spec.
= 5e-5 / f^2 Hz/sqrt(Hz) --> freq. noise = 5e-5 / f Hz/sqrt(Hz)

10 10 10 10 10 10 10 10-1 0 1 2 3 4 5 610
10
10
10
10
10
10
10
10
10
10
-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
Frequency (Hz)
Mag(Hz/sqrt(Hz))
fIR
Shot noise
Servo Elec.
fIR FR
foffset

fIR


pendulum
num(s)den(s)
noiseinjection
point2
noiseinjection
point1
inverted_pend
w_IP*w_IPden(s)
feedbackpointof GR
feedbackpoint
o f_cav
SHG
PDH_GR
IR->GR
2
F_MASS
F_GR1 F_GR
Demod_GRCavity Pole
wCav
(s+wCav)
A_VCO (V->Hz)
A_MASS
A_AOM
7
6 5
4
3
2
1
2
-K-
-K-
6
5
4
3
2
1
zeros(s)poles(s)
zeros(s)poles(s)
zeros(s)poles(s)
num(s)den(s)
Simulink model of Green Laser PDH Locking
fcav
fcav FR
= Seis
SHGinducednoise
fIR
ShotGrPDH
VCOnoise

[[ Each components of Green PDH ]]
Cavity pole for green laser
= c / 4 / L / (Finesse for green laser)
= 2.5 kHz
Finesse for green laser = 10
Demodulation gain for GrPDH
Resonant width in freq. of the arm cavity
= fFSR / (Finesse for green laser)
1 Volt
Demod Gain for GrPDH = (Finesse for Gr) / fFSR
= 2e-4 V/Hz
fFSR = c /2 /L = 50 kHz
Servo filter (F_GR)
servo gain = 0.1
pole freq. (1) = 0 Hz
zero freq. (1) = 2.5 kHz
Servo filter (F_GR1)
servo gain @DC = 1
zero freq. (1) = 0 Hz
pole freq. (1) = 10 Hz
Servo filter (F_MASS)
servo gain @DC = -2e+2pole zero
0 10
0 10
100 10
500
500
Mass Actuator (A_MASS)
servo gain @DC = 5e-6 um/V * m2Hz
= 4.7e+5 Hz/V
pole freq. = 1 Hz
Q favtor = 10
m2Hz = 2/lambda * c/2/L
= 9.3e+10

10-5
100
105
1010
Magnitude
Green PDH - Open Loop TF
OverallMass OnlyAO Only
10-2 10-1 100 101 102 103 104 105 106-180
-135
-90
-45
0
45
90
135
180
Frequency (Hz)
Phase(deg)
Cross-overfreq. = 10 Hz
OverallUGF= 40 kHz
-140 deg.
+135 deg.
135-(-140)= 275 - 180= 95 deg.

[[ GrPDH noise TF ]]
* cross-over freq. mass servo
10 Hz
* SHG noise, VCO noise, f_{IR} 10 Hz
* Shot noise GrPDH SHG, VCO, f_{IR} cavity pole
cavity pole freq. = 2.5 kHz --> pole zero
* fIR -> fcav

10-10
10-8
10-6
10-4
10-2
100
102Magnitude
Green laser freq noise coupling to fIR
SHGSeis+MassShot GrPDHVCOfIRMass servoSeis Att.
10-2 10-1 100 101 102 103 104 105 106-180
-135
-90
-45
0
45
90
135
180
Frequency (Hz)
Phase(deg)
Cross-overfreq. = 10 Hz

[[ Amount of noise source estimation ]]
* SHG induced noise
1e-5 (phase noise, f>10 Hz) --> 1e-5 * f (freq. noise)
** measured spectrum at Caltech 40m: LIGO G1000311-v2
* Seismic motion
= 1e-9 / f^2 m/sqrt(Hz)
* Shot noise of Green PDH
= 8e-6 Hz/sqrt(Hz)
???
* VCO freq. noise
** Agilent E8663D-UNX catalogue spec.
= 5e-5 / f^2 Hz/sqrt(Hz) --> freq. noise = 5e-5 / f Hz/sqrt(Hz)

fcav
10-2 10-1 100 101 102 103 10410-8
10-7
10-6
10-5
10-4
10-3
10-2
10-1
Magnitude
(Hz/sqrt(Hz))
Frequency (Hz)
SHGSeisShotVCO

fcav


IR Error
fIR
fIR
fPSL
fIR FR
foffset
Shot PLL
SHGinducednoise
VCOfreq.noise
ShotGrPDH
fCAV FR= Seis
ShotIR PDH
Elec. PLL
phasecomparator
gain
phasecomparator
pendulum
num(s)den(s)
noiseinjection
point3
noiseinjection
point2
noiseinjection
point1
noiseinjection
point
inverted_pend
w_IP*w_IPden(s)
feedbackpointof PLL
feedbackpointof GR
feedbackpoint
of f_cav
f->phi 3
2*pis
f->phi 2
2*pis
f->phi 1
2*pi
add 1
SW_THR
SHG
PDH_IR
PDH_GRIR->GR
Hz->m
F_THR
zeros(s)s 2
F_PZT
zeros(s)s 2
F_MASS
zeros(s)poles(s)
F_GR1
zeros(s)poles(s)
F_GR
zeros(s)poles(s)
Demod_GRCavity Pole
wCav
(s+wCav)
Beamcombiber
A_VCO (V->Hz)
A_THR
A_PZT
A_MASS
num(s)den(s)
A_AOM
11
10
9
8 7
6
5
4
3 2
1
-K-
-K-
2
2
-K-
-K-
-K-
-K-
-K-
10
9
87
6
5 4
3
2
1
s
Shot PLL

10-5
100
105Magnitude
Freq noise coupling to IR Error
Shot PLLElec. PLLfIR GRfoffset
10-2 10-1 100 101 102 103 104 105 106-180
-135
-90
-45
0
45
90
135
180
Frequency (Hz)
Phase(deg)
Cross Over= 10 Hz

10-3 10-2 10-1 100 101 102 103 10410-22
10-20
10-18
10-16
10-14
10-12
10-10
Frequency (Hz)
Mag(m/sqrt(Hz))
Displacement noises at IR Errorwithout PSL noise
Shot PLLElec. PLLfIR FRfoffsetSHGSeisShot GrVCOShot IR
cumulative spectrum
0.02 pm

10-10
10-5
100
Magnitude
PSL noise to IR Error
10-3 10-2 10-1 100 101 102 103 104-180
-135
-90
-45
0
45
90
135
180
Frequency (Hz)
Phase(deg)
Cross-OverFreq. = 10 Hz
fPSL

Free-run: frequency noise
1e+4 / f Hz/sqrt(Hz)

10-3 10-2 10-1 100 101 102 103 10410-20
10-18
10-16
10-14
10-12
10-10
10-8
Frequency (Hz)
Mag(m/sqrt(Hz))
PSL noises at IR Error
Total w/o PSLFree Run Laser1e-7 Hz/sqrt(Hz)1e-3 /f Hz/sqrt(Hz)toy model