Embed Size (px)
Citation preview

Least Squares Algorithms for Time-of-Arrival Based Mobile Location
K. W. Cheung H. C. So
Dept. of Computer Engineering & Information TechnologyCity University of Hong Kong
Tat Chee Avenue, Kowloon, Hong Kong
[email protected] [email protected]
W.-K. Ma Y. T. Chan
Dept. of Electronic Engineering The Chinese University of Hong Kong
Shatin, N.T., Hong Kong
[email protected] [email protected]
ABSTRACT Accurate localization of mobile phones is of considerable interest in wireless communications. In this paper, two algorithms are developed for accurate mobile location using the time-of-arrival measurements of the signal from the mobile station at three or more base stations. The first algorithm is an unconstrained least squares (LS) estimator which enjoys its implementation simplicity. The second algorithm considers solving a nonconvex constrained LS problem for improving estimation accuracy. Simulation results show that the constrained LS estimator yields better performance than its unconstrained counterpart and achieves both the Cramer-Rao lower bound and the optimal circular error probability.
Keywords Time-of-arrival, positioning algorithms, mobile terminals
1. INTRODUCTION Mobile location has received a lot of interest since the first ruling of the Federal Communications Commission for detection of emergency calls in the United States in 1996 [1]. The capability of accurate positioning of a mobile phone is one of the essential features that will help third generation (3G) wireless systems in reaching a wide success and triggering a large number of innovative applications. In addition to emergency management, mobile position information will also be useful in intelligent transport systems, location billing, interactive map consultation and monitoring the mentally impaired [2]-[6]. Wireless location systems usually require two or more base stations (BSs) to intercept a mobile station (MS) signal. Common location approaches are based on time-of-arrival (TOA), received signal strength (RSS), time-difference-of-arrival (TDOA) or angle-of-arrival (AOA) measurements determined from the MS signals received at the BSs [6]-[8]. In the TOA method, the distance between the MS and BS is measured by finding the one-way
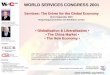
propagation time of a signal travelling between them. Geometrically, the MS position is given by the intersection of circles associated with at least three BSs in order to resolve ambiguities arising from multiple crossings of the lines of position, assuming perfect TOA measurements are employed. In practical situations where the TOA measurements are subject to errors, nonlinear least squares (NLS) is an appropriate but computationally demanding approach to estimate the MS position [4]. The RSS measurements are obtained by using the same trilateration concept where the path losses of the radio propagation from the MS to the BSs are measured to give their distances. In the TDOA method, the difference in TOAs of the MS signal at multiple pairs of BSs are measured. Each TDOA measurement defines a hyperbolic locus on which the MS must lie and the location estimate is given by the intersection of two or more hyperboloids. Finally, the AOA method necessitates the BSs to have multi-element antenna arrays for measuring the arrival angles of a signal from the MS at the BSs. From the AOA estimate, a line of bearing (LOB) from the BS to the MS can be drawn and the position of the MS is calculated from the intersection of a minimum of two LOBs. The principles of these methods can be visualized in Figure 1. In the general case with extra measurements, the TOA, RSS, TDOA or AOA estimates are converted into a set of nonlinear equations, from which the MS position can be determined with the knowledge of the BS geometry.
Figure 1. TOA, TDOA, RSS & AOA measurements
___________________________________________________ Copyright is held by the authors.
PGDay 2003, Jan. 25, 2003, The Hong Kong Polytechnic University, Hong Kong.

The focus of this paper is to develop accurate and computationally efficient mobile positioning algorithms using the TOA measurements. Our previous work [9] on TOA-RSS hybrid positioning was based on the maximum likelihood (ML) approach. Although the performance of the ML-based methods can attain the Cramer-Rao lower bound (CRLB), their computational complexity is extremely demanding. Moreover, the ML cost functions are multimodal and thus initial guesses close to the true position, which may be difficult to obtain in practice, are required for global convergence. To allow real-time implementation and ensure global optimization, we adopt the idea of the spherical interpolation (SI) in TDOA-based location [10] that reorganizes the nonlinear hyperbolic equations into a set of linear spherical equations by introducing an intermediate variable, which is a function of the source position. However, the SI estimator solves the linear equations directly via the standard least squares (LS) without using the known relation between the intermediate variable and the position coordinates. To improve the location accuracy of the SI approach, Chan and Ho had proposed [11] to use two weighted linear squares (WLS) to estimate the source position by exploiting this relation implicitly, while [12] incorporates it explicitly by minimising a constrained LS function based on the technique of Lagrange multipliers. According to [12], these two modified algorithms are referred to as the quadratic-correction least-squares (QCLS) and linear-correction least-squares (LCLS), respectively. Recently, the QCLS method has been modified for TOA-based location in the presence of non-line-of sight (NLOS) propagation [13], that is, when at least one of the direct or line-of-sight (LOS) paths between the MS and BS is blocked.
The rest of the paper is organized as follows. In Section 2, the model for the TOA measurements is described. In Section 3, we first derive a simple LS TOA-location algorithm based on the SI. An improved algorithm which weighs the LS function and exploits the relation between the range and the position coordinates, is then devised. Two important performance measures of location accuracy, namely, the CRLB [6] and circular error probability (CEP) [14] are reviewed in Section 4. Simulation results are presented in Section 5 to evaluate the location estimation performances of the two methods. Finally, conclusions are drawn in Section 6.
2. TOA MEASUREMENT MODEL It is assumed that a reliable NLOS detection algorithm has first been employed to eliminate the measurements with large errors. As a result, all measurements we utilize for the MS location come from LOS propagation. Let the true location of the MS be
and the coordinates of the ith BS be [ , , where
Tss yx ],[=uMi ,,2,1 L=
Tii yx ],
M is the total number of receiving LOS BSs. The distance between the MS and the ith BS, denoted by , is given by
id
( ) ( ) Miyyxxd isisi ,,2,1,22K=−+−= (1)
In the absence of measurement error, the one-way propagation time taken for signal to travel from the MS to the ith BS, t , is i
Micd
t ii ,,2,1, K== (2)
where is the speed of light. The range measurement based on t in the presence of disturbance, denoted by , is modeled as
18 ms103 −−×≈ci
ir
( ) ( ) Minyyxx
ndr
iisis
iii
,,2,1,22K=+−+−=
+= (3)
where n is the measurement error in at the ith BS. For ease of analysis, we assume that each measurement error n is a zero-
mean white process with variance .
i ir
i
2iσ
3. MOBILE LOCATION ALGORITHMS 3.1 Least Squares In this section, we first apply the SI technique to develop an LS mobile location estimator using the TOA measurements. Without measurement errors, (3) becomes:
( ) ( ) Miyyxxr isisi ,,2,1,22L=−+−= (4)
Squaring both sides of (4) yields
( ) ( )
( ) MiryxRyyxx
yxyyxxyxr
iiisisis
iiisisssi
,,2,1,215.0
22
2222
22222
L=−+=−+⇒
++−−+= (5)
where 22sss yxR += is the range variable introduced in order to
reorganize (4) into a set of linear equations in x , and . Expressing (5) into matrix form, we have
s sy 2sR
bAθ = (6)
where
−+
−+=
=
−
−=
222
21
21
21
2
11
21
5.0
5.0
iii
s
s
s
MM
ryx
ryx
Ryx
yx
yx
M
MMM
b
A
θ
In the presence of measurement errors, θ can be estimated using unconstrained LS:
( ) ( )( ) bAAA
bAθbAθθθ
TT
T
1
minargˆ−=
−−= (7)
3.2 Weighted Least Squares with Constraint For better performance, we can add a weighting matrix W to (7) and restrict to satisfy the basic relationship, θ
222sss yxR += (8)
This leads to a constrained optimization problem as follows:

( ) ( bAθWbAθθθ
−−= Tminargˆ ) (9)
subject to
(10) 0=+ Pθθθq TT
where and
=
000010001
P
−=
100
q
Here (10) is a matrix representation of (8). Let us study the disturbance in b , which will lead to a suggestion on the choice of W . For sufficiently small measurement error or high signal-to-noise ratio (SNR) conditions, the squared value of can be approximated as
ir
( ) Minddndr iiiiii ,,2,1,2222 L=+≈+= (11)
As a result, the disturbance between the true and measured squared distances is
Minddr iiiii ,,2,1,222 L=≈−=ε (12)
In vector form, { }iε is expressed as
(13) [ T
MM ndndnd 2,,2,2 2211 L=ε ]The covariance matrix of the disturbance is thus of the form
(14) { } BQBεεψ == TE
where and . Under the above assumptions, the optimum weighting matrix for (9) is , which depends on the unknown { . For this reason,
we approximate , where .
( )Mddd 2,2,2diag 21 K=B
1−ψ
BQBψ ˆˆ≈
( )222
21 ,,diag Mσσσ K=Q
}id
{ }Mrrr 2,,2,2diag 21 K
=Wˆ =B
We now go back to solve (9) subject to (10), which is equivalent to minimizing the Lagrangian [8]
( ) ( ) ( ) ( )PθθθqbAθψbAθθ TTT ++−−=Γ − λλ 1, (15)
where λ is the Lagrange multiplier. The minimum of (15) is obtained by differentiating ( )λ,θΓ with respect to ( )λ,θ and then equating the resultant expressions to zero:
( ) ( ) 022, 11 =+−+=∂
Γ∂ −− qbψAθPAψAθθ
λλλ TT (16)
( ) 0,=+=
∂Γ∂ Pθθθqθ TT
λλ (17)
Given λ , the solution to (16) is
( ) ( )
−+= −−− qbψAPAψAθ2
ˆ 111 λλλ TT (18)
To find the λ that satisfies (17), we substitute (18) into (17)
( )
( ) ( ) 022
2
111111
111
=
−++
−+
−+
−−−−−−
−−−
qbψAPAψAPPAψAqAψb
qbψAPAψAq
λλλ
λ
λλ
TTTTT
TTT
(19)
The matrix ( can be diagonalized as ) PAψA 11 −−T
( ) 111 −−− Λ= UUPAψAT (20)
where ( )321 ,,diag γγγ=Λ and iγ , are the eigenvalues
of the matrix
3,2,1=i
( )1 A− .1 P−ψA T Substituting (20) into
( ) 11 −− + PA λψAT gives
( ) 11 −− + PAψA λT ( ) ( 1111 −−−−Λ+= AψAUIU Tλ ) (21)
Putting (21) into (19), we get
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) 04
22
2
112
1111
1111
=Λ+ΛΛ++
Λ+ΛΛ+−Λ+ΛΛ+−
Λ+ΛΛ++Λ+−Λ+
−−
−−−−
−−−−
gIIc
fIIcgIIe
fIIegIcfIc
λλλ
λλλλλλ
λλλλλ
T
TT
TTT
(22) where
[ ]321 cccTT == Uqc
( ) [ ]TT ggg 321
111 == −−− qAψAUg
[ ]3211 eeeTT == − AUψbe
( ) [ ]TTT fff 3211111 == −−−− bψAAψAUf
Since the matrix ( ) PAψA 11 −−T is of rank 2, one of its eigenvalues, say, 3γ , must be zero. After expansion of equation (22) and putting 03 =γ , (22) is simplified to:
( )
( ) ( ) ( ) 0141212
112122
12
22
12
2
12
2
12
2
1
2
13333
=+
++
−+
−
++
+−
++−
∑∑∑
∑∑∑
===
===
i i
iii
i i
iii
i i
iii
i i
iii
i i
ii
i i
ii
gcfcge
fegcfcgcfc
λγγλ
λγγλ
λγγλ
λγγ
λγλ
λγλ
(23)
which is an equation of 5 roots. The desired λ is found by the following procedures. i. Obtain the 5 roots using a root finding algorithm. Discard any
complex roots because the Lagrange multiplier is always real for real optimization problems.
ii. Put the real s'λ back to (18) and obtain sub-estimates of . θ
iii. The sub-estimate that yields the smallest objective value of ( ) ( )bAθWbAθ −− T is taken as the globally optimal constrained WLS solution.
4. CRLB and CEP The CRLB gives a lower bound on variance attainable by any unbiased estimators and thus it can be served as a benchmark to contrast with the mean square error of the TOA positioning algorithms. The CRLB for the kth parameter estimate of u , denoted by CRLB , where u , can be computed from [15]:
)ˆ( ku Tss
T yxuu ]ˆ,ˆ[]ˆ,ˆ[ˆ21 ==
( ) ( )[ ] 2,1,uCRLB 1 == − kkkk uI (24)
where

( )[ ] ( )
∂∂∂
−=ji
ij uupE uruI |ln2
(25)
is the corresponding Fisher information matrix (FIM). The quantity is the probability density function of the measurements, r , conditioned on the location of the MS and is the expectation operator.
( ur |p
E
)][ T
Mrrr K21=
[ ].From (25), the FIM can be calculated as
( )( )
( ) ( )[ ]( )( )( ) ( )[ ]
( )( )( ) ( )[ ]
( )( ) ( )[ ]
−+−−
−+−−−
−+−−−
−+−−
=
∑∑
∑∑
==
==
M
i isisi
isM
i isisi
isis
M
i isisi
isisM
i isisi
is
yyxxyy
yyxxyyxx
yyxxyyxx
yyxxxx
1222
2
1222
,
1222
1222
2
σσ
σσuI (26)
Then the corresponding CRLB can be calculated by using (24) and (26). It is noteworthy the CRLB should remain unchanged when the NLOS measurements, if any, are also included in the computation [16].
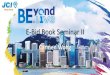
Apart from the CRLB, there is another approximate but simple measure of accuracy for location estimate, which is called the CEP. It is defined as the radius of the circle that has its centre at the mean and contains half the realizations of the location estimates. If the location estimator is unbiased, the CEP is a measure of the uncertainty in the location estimate u relative to the actual MS location.
ˆ
Therefore, the smaller the CEP, the more reliable the estimator should be. Note that an ellipse, which is characterized by its angle of rotation from x-axis, major and minor axes, can generally describe the contour that contains half the realizations of estimates much better than the CEP circle. The complete procedures for computing this ellipse as well as the CEP using the ML location estimate in Gaussian noise can be found in [14]. Since the ML method can always give optimum location estimates, the CEP using the ML location estimate is the optimal CEP.
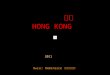
5. SIMULATION RESULTS Computer simulations were performed to evaluate the performance of the proposed TOA-based location algorithms. The evaluated performance was also compared with the CRLB and CEP based on ML estimation. There were 5 BSs involved in the simulation and the location of MS was at . All results were averages of 1000 independent runs.
[ ]m2000,1000
Figure 3 shows that the geometry of the BSs. They were situated at [ ]m0,0 , [ ]m3000,33000 , [ ]m6000,0 , [ ]m3000,33000− and
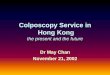
[ ]m3000,33000 −− . Figure 4 shows the mean square range
errors (MSREs), defined as E , of the LS and constrained WLS methods as well as the CRLB [8][15]
versus the average SNR, given by
( )2ˆss xx − ([ ]2ˆ
ss yy −+ )
∑=
M
iM 1
1
i
id2
2
σ. In this simulation,
the SNRs
2
2
i
idσ
were identical for all TOA measurements. It can
be seen that the performance of the constrained WLS was very close to optimum and it was superior to the LS by approximately 5 dB for the whole range of SNRs. Figures 5 and 6 show the distribution of 1000 location estimates obtained by the LS and constrained WLS techniques, respectively. The SNR was at 50dB. The circles in the figures were centred at the true location of the MS, which included half of the location estimates. As shown in the figures, the radii or CEPs of the LS and constrained WLS were 19.11m and 9.97m, respectively. Thus, the constrained WLS estimator outperformed the LS estimator by approximately 10m in CEP. Moreover, the CEP for the ML estimator was calculated to be 9.95m [9] and as a result, the optimality of the constrained WLS method is again demonstrated.
6000m (d
B)
erro
rang
e
are
n sq
me
6000m
6000m
6000m ( )m0,0
Figure 3. Location of the BSs
This circle containshalf of the locationestimates
Particular Estimate
CEP Mean Estimate
40 45 50 55 605
10
15
20
25
30
35
40No. of BS=5, MS at [1000m, 2000m]
Signal-to-Noise Ratio (dB)
au
r
LSconstrained WLSCRLBFigure 2. Illustration of CEP
Figure 4. Mean square range errors of proposed methods

20
20
20
19
19
19
940 960 980 1000 1020 1040 1060
40
60
80
2000
20
40
60
No. of BS=5, MS at [1000m, 2000m], radius=19.11mSNR=50dB
x coordinate
y co
ordi
nate
The above experiment was repeated for the following BS geometry: , [ ]m0,0 , [ ]m0,6000 [ ]m6000, and
, which is shown in Figure 7. In Figure 8, we see that the MSREs of the constrained WLS algorithm remained close to the CRLBs and outperformed the LS by about 5dB. In Figures 9 and 10, which show the distribution of location estimates for the LS and constrained WLS techniques, the radii of the circles were 19.82m and 10.69m respectively. The optimal CEP was calculated to be 10.61m, which illustrates that the constrained WLS algorithm is optimal.
[ m0,6000− ][ 6000,0 − ]m
0 ,
( )m0,0
6000m
6000m 6000m
6000m Figure 7. Location of the BSs
40 45 50 55 605
10
15
20
25
30
35
40No. of BSs=5, MS at [1000,2000]m
Signal-to-Noise Ratio (dB)
mea
n sq
uare
rang
e er
ror (
dB)
LSconstrained WLSCRLB
Figure 5. CEP for LS TOA-based location algorithm
940 960 980 1000 1020 1040 10601940
1960
1980
2000
2020
2040
2060
x coordinate
y co
ordi
nate
No. of BS=5, MS at [1000m, 2000m], radius=9.97mSNR=50dB
9401940
1960
1980
2000
2020
2040
2060
y-co
ordi
nate
m
Figure 6. CEP for constrained WLS TOA-
based location algorithm
Figure 8. Mean square range errors of proposed methods
No. of BS=5, MS at [1000m, 2000m], radius=19.82
960 980 1000 1020 1040 1060x-coordinate
SNR=50dB
Figure 9. CEP for LS TOA-based location algorithm

6. CONCLUSIONS Two TOA-based location algorithms are developed based on the SI approach using TDOA measurements. The first LS algorithm directly extends the SI using the TOA measurements. The second method is an improved version of the first algorithm via employing WLS and constraints, at the expense of increasing the computational complexity. It is shown that the constrained WLS approach can attain the CRLB and the optimal CEP.
7. ACKNOWLEDGMENTS This work is partially supported by a grant from the Research Grants Council of the Hong Kong Special Administrative Region, China (Project No. CityU 1119/01E).
8. REFERENCES [1] http://www.fcc.gov/e911 [2] C.Drane, M.Macnaughtan and C.Scott, "Positioning
GSM telephones," IEEE Communications Magazine, pp.46-54, April 1998
[3] H.Koshima and J.Hosen, “Personal locator services emerge,” IEEE Spectrum, pp.41-48, Feb. 2000
[4] Y.Zhao, "Mobile phone location determination and its impact on intelligent transport systems," IEEE Trans. Intelligent Transportation Systems, vol.1, pp.55-64, March 2000
940 960 980 1000 1020 1040 10601940
1960
1980
2000
2020
2040
2060
x-coordinate
y-co
ordi
nate
No. of BS=5, MS at [1000m, 2000m], radius=10.69mSNR=50dB [5] D.Porcino, “Performance of a OTDOA-IPDL
positioning receiver for 3G-FDD mode,” Proc. Int. Conf. 3G Mobile Communication Technologies, pp.221-225, 2001
[6] J.J.Caffery, Jr., Wireless Location in CDMA Cellular Radio Systems, Kluwer Academic Publishers, 2000
[7] J.C.Liberti and T.S.Rappaport, Smart Antennas for Wireless Communications: IS-95 and Third Generation CDMA Applications, Upper Saddle River: Prentice-Hall, 1999
[8] M.McGuire, K.N.Plataniotis, “A comparison of radiolocation for mobile terminals by distance measurements”, Proc. Int. Conf. Wireless Communications, pp.1356-1359, 2000
[9] K.W.Cheung, H.C.So and Y.T.Chan, “Mobile location using time-of-arrival and received signal strength measurements”, Proc. of the 14th Int. Conf. Wireless Communications, vol.2, pp.558-565, July 2002 Figure 10. CEP for constrained WLS TOA-
based location algorithm [10] J.O.Smith, J.S.Abel, “Closed-form least-squares source location estimation from range-difference measurements”, IEEE Trans. Acoust., Speech, Signal Processing, vol. ASSP-35, pp. 1661-1669, Dec. 1987
[11] Y.T.Chan and K.C.Ho, “A simple and efficient estimator for hyperbolic location”, IEEE Trans. Signal Processing, vol. 42, pp. 1905-1915, Aug.1994
[12] Y.Huang, J.Benesty, G.W.Elko and R.M.Mersereau, “Real-time passive source localization: a practical linear-correction least-squares approach”, IEEE Trans. Speech, Audio Processing, vol.9, pp. 943-956, Nov. 2001
[13] X.Wang and Z.Wang, “A TOA-based location algorithm reducing the errors due to non-line-of-sight (NLOS) propagation”, Proc. VTC 2001 Fall, vol.1, pp.97-100, 2001
[14] D.J.Torrieri, “Statistical theory of passive location systems”, IEEE Trans. on Aerospace and Electronic Systems, vol.20, pp.183-197, March 1984
[15] S.M.Kay, Fundamentals of Statistical Signal Processing: Estimation Theory, Prentice- Hall, 1993
[16] Y.Qi and H.Kobayashi, “Cramer-Rao lower bound for geolocation in non-line-of-sight environment, Proc. ICASSP 2002, vol.3, pp.2473-2476, 2002

Biography K. W. Cheung was born in Hong Kong. He received the B.Eng. degree with First Class Honours in Electrical & Electronic Engineering from Imperial College of Science, Technology & Medicine, University of London in 2001.
From October to November 2001, he was a Research Assistant in the Department of Computer Engineering & Information Technology at the City University of Hong Kong. He is currently pursuing an M.Phil. degree in the same department. His research interests are in array signal processing, and developing efficient methods in radiolocation for mobile terminals. Mr. Cheung is now an Associate Member of Institution of Electrical Engineers in U.K. and the Hong Kong Institution of Engineers. H. C. So was born in Hong Kong. He obtained the B.Eng. degree in Electronic Engineering from City Polytechnic of Hong Kong in 1990. From 1990 to 1991, he was an Electronic Engineer at the Research & Development Division of Everex Systems Engineering Ltd. In 1995, he received the Ph.D. degree in Electronic Engineering from The Chinese University of Hong Kong. He then worked as a Post-Doctoral Fellow at The Chinese University of Hong Kong, and was responsible for devising and analyzing efficient algorithms for geolocation. From 1996 to 1999, he was a Research Assistant Professor at the Department of Electronic Engineering, City University of Hong Kong. Currently he is an Assistant Professor in the Department of Computer Engineering & Information Technology at City University. His research interests include adaptive filter theory, detection and estimation, wavelet transform, and signal processing for communications and multimeda.
Wing-Kin Ma received the B.Eng. (with first class honours) degree in electrical and electronic engineering from the University of Portsmouth, Portsmouth, U.K., in 1995. He obtained the M.Phil. and Ph.D. degrees, both in electronic engineering, from the Chinese University of Hong Kong, in 1997 and 2001, respectively. In 2000, he was with the Department of Electrical and Computer Engineering, McMaster University, Hamilton, ON, Canada, as a Visiting Scholar. Presently, he is a Research Associate with the Department of Electronic Engineering, the Chinese University of Hong Kong. His research interest lies in communications and signal processing, with recent focus on multiuser detection and advanced receiver techniques for communications. Dr. Ma's Ph.D. thesis was commended to be "of very high quality and well deserved honorary mentioning" by the Faculty of Engineering, the Chinese University of Hong Kong, in 2001. Y. T. Chan was born in Hong Kong. He received the B.Sc. and M.Sc. degrees from Queen’s University, Kingston, Ontario, Canada, in 1963 and 1967, and the Ph.D. degree from the University of New Brunswick, Fredericton, Canada, in 1973, all in electrical engineering. He has worked with Northern Telecom Ltd. and Bell-Northern Research. From 1973 to 2001, he was at the Department of Electrical and Computer Engineering of Royal Military College of Canada. Currently he is a Visiting Professor at the Department of Electronic Engineering of The Chinese University of Hong Kong. His research interests are in sonar signal processing and passive localization and tracking techniques. He has served as a consultant on sonar systems. He was an Associate Editor (1980-1982) of the IEEE Transactions on Signal Processing and was the Technical Program Chairman of the 1984 International Conference on Acoustics, Speech and Signal Processing (ICASSP-84). He directed a NATO Advanced Study Institute on Underwater Acoustic Data Processing in 1988 and was the General Chairman of ICASSP-91 held in Toronto, Canada.