Embed Size (px)
Citation preview
Lec 22, Ch.18, pp.503-512: Capacity & LOS (Objectives)
Understand how critical lane groups and the sum of critical lane v/s rations are determinedLearn how to modify signal timing based on v/s ratiosKnow the components of delays modes for standard casesKnow how delays for protected plus permitted phasing from exclusive LT lane groups are estimated
What we discuss in class today…
Steps for determining critical lane groups and the sum of critical lane v/s ratiosMethod to determine lane group capacities and v/c ratiosMethod to modify signal timing based on v/s rationsDelay models for standard casesDelay models for protected plus permitted phasing from exclusive LT lane groupsIssues relating to the analysis of actuated signals
HCM-way of determining lane groups and the sum of critical lane group v/s ratios
In a simple signal timing method, critical lane groups were determined by comparing adjusted per lane flows in each lane group using a ring diagram.
In the 2000 HCM, per-lane flows cannot be compared because we have lane group flows. So, we use v/s ratios to determine critical lane groups.
Once the v/s is computed (the outcomes of Module 2 and 3 of the 2000 HCM), v/s is used to determine critical lane groups and a ring diagram is again used.
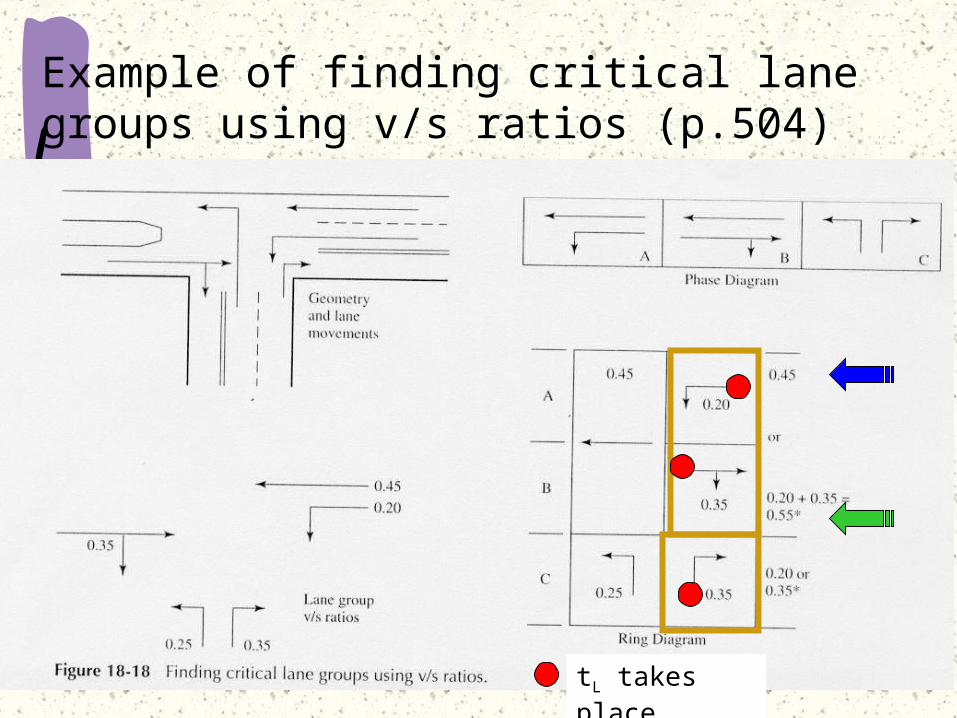
Example of finding critical lane groups using v/s ratios (p.504)
tL takes place.

Example of finding critical lane groups using v/s ratios (p.504) – cont.
90.035.035.020.0/ cisv
This indicates the proportion of real time that must be devoted to effective green. In this case 90% of the cycle. Conversely, 1 – 0.9 = 0.1 is available for lost times. Hence in this example,
901.0
9min C
In general,
ci
L
sv
ntC
)/(1min
ci
opt sv
LC
)/(1
55.1
Webster model,
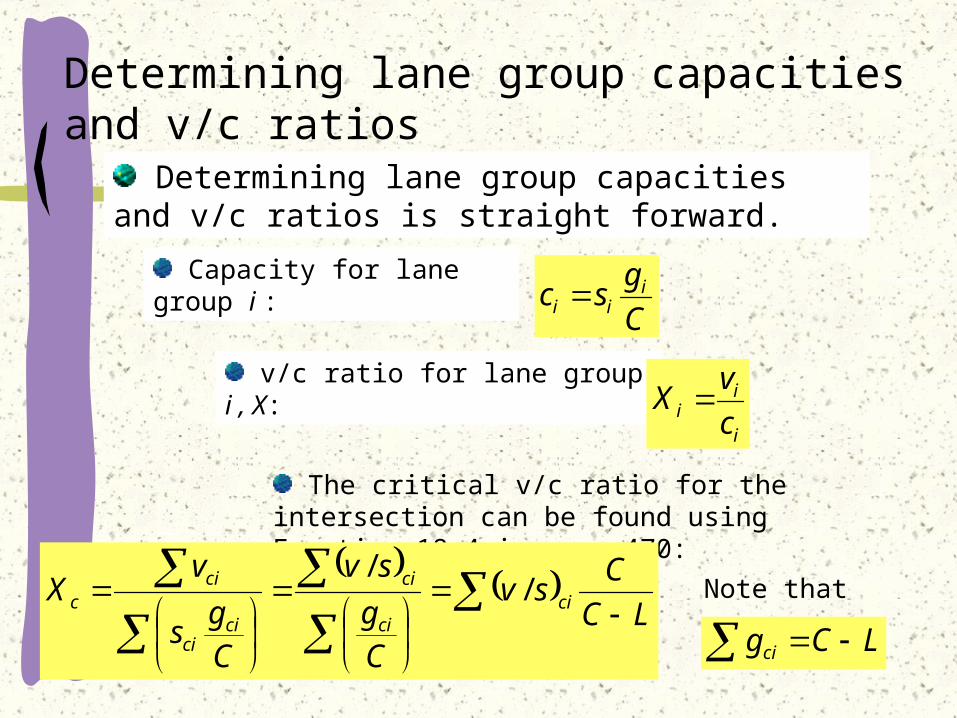
Determining lane group capacities and v/c ratios
Determining lane group capacities and v/c ratios is straight forward.
Capacity for lane group i :
C
gsc iii
v/c ratio for lane group i , X:
i
ii c
vX
The critical v/c ratio for the intersection can be found using Equation 18-4 in page 470:
LC
Csv
Cg
sv
Cg
s
vX ci
ci
ci
cici
cic /
/Note that
LCgci

Modifying signal timing based on v/s ratios
After v/s ratios are computed, we may need to make adjustments – either reallocation of green time, modifying cycle length, or modifying the intersection layout. For the first two cases, v/s rations can be used to reduce the amount of trial-and-error computations.
First, we solve Eq. 18-4 for C:
LC
Csv
C
g
sv
C
gs
vX ci
ci
ci
cici
cic /
/
cic
c
svX
LXC
/
When Xc = 1.0, it is like C equation for simple signal timing. Suppose sum(v/s) = 0.9, and we desire to achieve Xc = 0.95. What would be the cycle length to achieve this for the problem in Figure 18-18?
sec90sec17190.095.0
)95.0(9min
CC
Xc = 0.95 cannot be achieved in this case. C = 171 sec is too long.
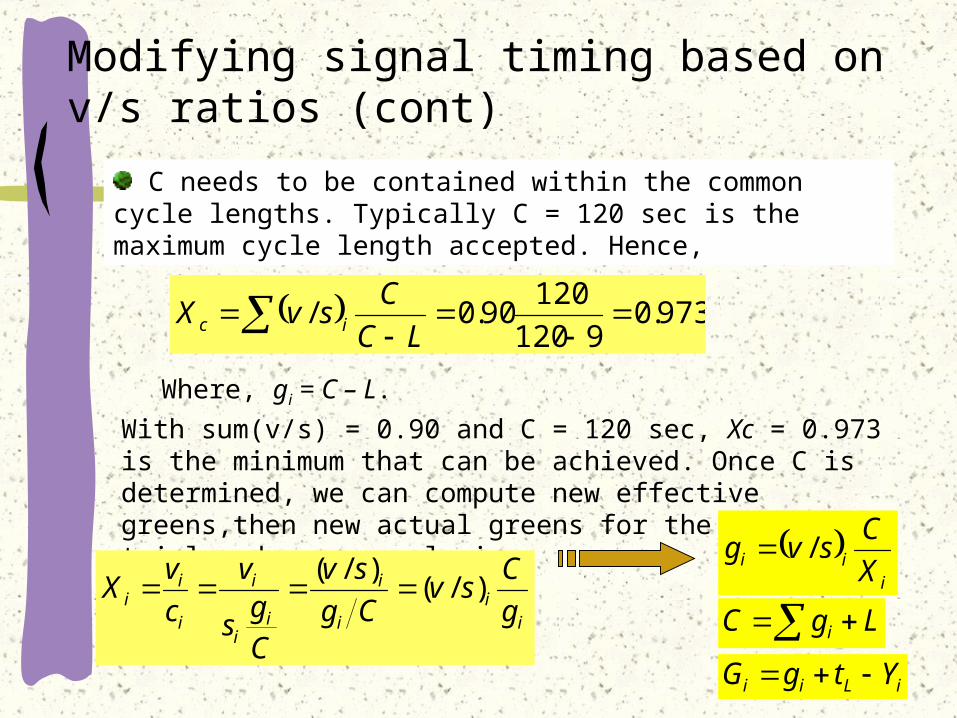
Modifying signal timing based on v/s ratios (cont)
C needs to be contained within the common cycle lengths. Typically C = 120 sec is the maximum cycle length accepted. Hence,
973.09120
12090.0/
LC
CsvX ic
Where, gi = C – L.
With sum(v/s) = 0.90 and C = 120 sec, Xc = 0.973 is the minimum that can be achieved. Once C is determined, we can compute new effective greens,then new actual greens for the next trial-and-error analysis.
ii
i
i
ii
i
i
ii g
Csv
Cg
sv
Cg
s
v
c
vX )/(
)/(
i
ii X
Csvg /
LgC i iLii YtgG

LOS module This is the last step—estimating average individual
stopped delays for each lane group.
1. Delay models for standard cases (for permitted or protected or compound phasing phasing from a shared lane group):
cT
tuQd
cT
kIXXXTd
CgX
CgC
d
ddPFdd
b
11800
81)1(900
,1min1
15.0
3
22
2
1
321
CgfP
PF PA
1
1
(Eq. F16.1, p.16-144)

LOS module (cont)2. Delay models for protected plus permitted phasing from exclusive LT lane groups
“it should be noted that compound phasing is not generally used when more than one exclusive lane is present.” What this confusing statement wants to say is “when double exclusive LT lanes exist, compound phasing is not used. Protected LT phase is always used for double exclusive LT arrangement for safety.”
The effect of compound phasing applies only to the uniform delay component. It is adjusted to reflect varying arrival and departure patterns.
Five different cases may arise as you see in the next slide.
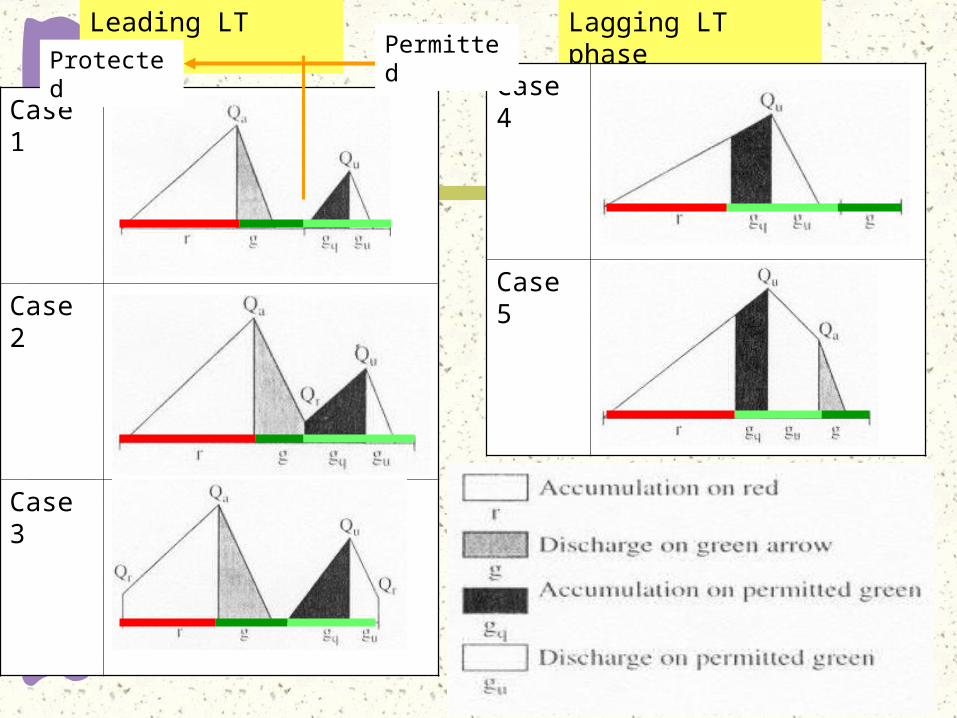
Case 1
Case 2
Case 3
Leading LT phase Lagging LT phase
Case 4
Case 5
ProtectedPermitted
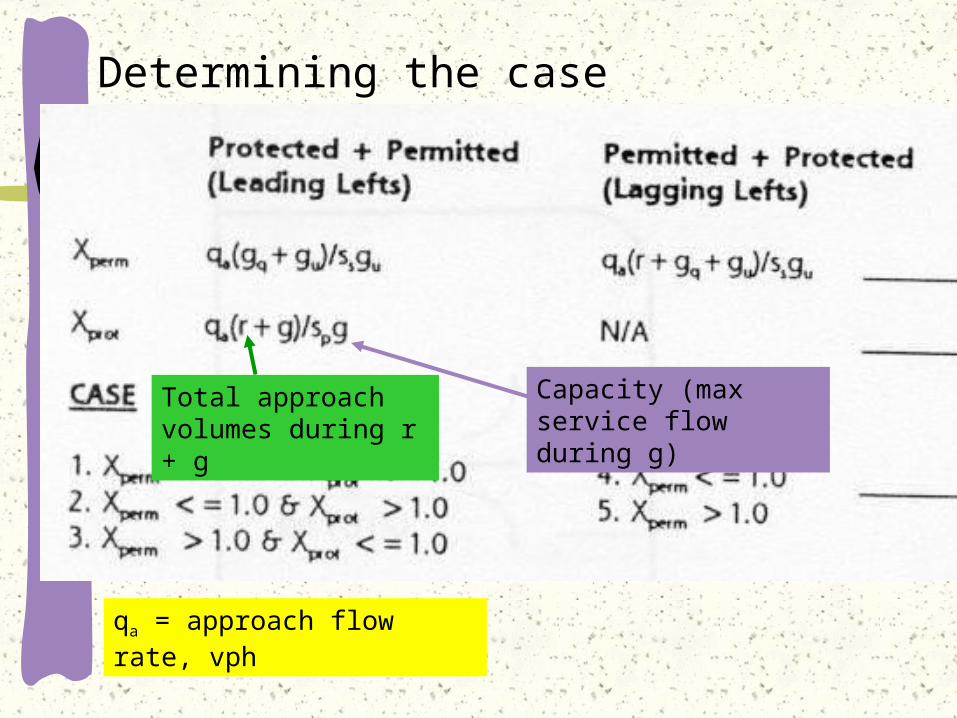
Determining the case
qa = approach flow rate, vph
Total approach volumes during r + g
Capacity (max service flow during g)

Uniform delay formulas
r g
qa sp
Total arrival volume during a cycle (because we are computing average control delay per vehicle)
Qa
qa gsp g
ap
a
aap
aap
qs
Qg
Qgqgs
gqQgs
Note that this g and gu do not have to be their interval values. Simply, they are the time needed to clear the queues.
Area = total delay (veh.sec)
d1 = [0.5/

A close look at the delay for Case 1
Note that the delay computed from this diagram is approach delay. Divide it by 1.3 to get stopped delay.
tc
A B
A Area = (1/2)rQa
B To find the area of B, we need to find tc.
sp*tc = Qa + qa*tc
tc = Qa/(sp – qa)
Area = (1/2)Qa*Qa/(sp – qa)
= (1/2)Qa2/(sp – qa)
Hence, 0.38rQa
Hence, 0.38Qa2/(sp –
qa)

Numerical example for multiple time periods
See page 16-146 in Appendix F
Use the overhead projector…