-
8/9/2019 Lec5 Class Margin
1/28
Linear Classication: Maximizing the Margin
Yufei TaoDepartment of Computer Science and Engineering
Chinese University of Hong Kong
1 / 28 Yufei Tao Linear Classication: Maximizing the Margin
http://find/
-
8/9/2019 Lec5 Class Margin
2/28
Consider that we are given a linearly separable dataset P in R
d
. In otherwords, P has points of two colors: red and blue; and
we can nd a planec 1x 1 + c 2x 2 + ... + c d x d = 0 such that
given a point p (x 1,..., x d ) in P :
if p is red, then c 1x 1 + c 2x 2 + ... + c d x d > 0.
if p is blue, then c 1x 1 + c 2x 2 + ... + c d x d < 0.
There can be many such separation planes. So far we have been
satisedwith nding any of them. In this lecture, we will introduce a
metric tomeasure the quality of a plane, and then discuss how to nd
the bestplane according to the metric.
2 / 28 Yufei Tao Linear Classication: Maximizing the Margin
http://find/http://goback/
-
8/9/2019 Lec5 Class Margin
3/28
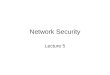
Given a separation plane with respect to P , we dene its margin
to beits smallest distance to the points in P .
Example 1.
margin margin
Which plane would you choose?
3 / 28 Yufei Tao Linear Classication: Maximizing the Margin
http://find/
-
8/9/2019 Lec5 Class Margin
4/28
Denition 2.
Let P be a linearly separable dataset in R d . The goal of the
large margin
separation problem is to nd a separation plane with the
maximummargin.
margin
Any algorithm solving this problem is called a support vector
machine.
4 / 28 Yufei Tao Linear Classication: Maximizing the Margin
http://find/
-
8/9/2019 Lec5 Class Margin
5/28
Next, we will discuss two methods to approach the problem. The
rstone nd gives the optimal solution, but is quite complicated and
(often)computationally expensive. The second method, on the other
hand, is
much simpler and (often) much faster, but gives an approximate
solutionwhich is nearly optimal.
5 / 28 Yufei Tao Linear Classication: Maximizing the Margin
http://find/
-
8/9/2019 Lec5 Class Margin
6/28
Finding the Optimal Plane
6 / 28 Yufei Tao Linear Classication: Maximizing the Margin
http://find/
-
8/9/2019 Lec5 Class Margin
7/28
We will model the problem as a quadratic programing problem.
Towardsthat purpose, let us do some analysis. Consider an arbitrary
separationplane c 1x 1 + c 2x 2 + ... + c d x d = 0. Imagine that
there are two copies of
the plane. One person moves a copy up, while another person
moves theother copy down, both at the same speed. They stop as soon
as one of the two copies hits a point in P .
margin
1
2
7 / 28 Yufei Tao Linear Classication: Maximizing the Margin
http://find/
-
8/9/2019 Lec5 Class Margin
8/28
Now, focus on the two copies of the plane in their nal
positions. If onecopy has equation c 1x 1 + c 2x 2 + ... + c d x d
= c d +1 , then the other copymust have equation c 1x 1 + c 2x 2 +
... + c d x d =
c d +1 . Here c d +1 is a
strictly positive value. Let p (x 1,..., x d ) be a point in P .
We must have(think: why?):
if p is red, then c 1x 1 + c 2x 2 + ... + c d x d c d +1 ;if p
is blue, then c 1x 1 + c 2x 2 + ... + c d x d c d +1 .
By dividing c d +1 on both sides of each inequality, we have:if
p is red, then w 1x 1 + w 2x 2 + ... + w d x d 1if p is blue, then
w 1x 1 + w 2x 2 + ... + w d x d 1
where
w i = c i c d +1
.
8 / 28 Yufei Tao Linear Classication: Maximizing the Margin
http://find/
-
8/9/2019 Lec5 Class Margin
9/28
We will refer to the following plane as 1:
w 1x 1 + w 2x 2 + ... + w d x d = 1
the following plane as 2:
w 1x 1 + w 2x 2 + ... + w d x d = 1The margin of the original
separation plane is exactly half of the distancebetween 1 and
2:
margin
1
2
9 / 28 Yufei Tao Linear Classication: Maximizing the Margin
http://find/
-
8/9/2019 Lec5 Class Margin
10/28
Lemma 3.
The distance between 1 and 2 is 2 P d i =1 w 2i .
To prove the lemma, we will introduce vector ~ w = [w 1, w
2,..., w d ]. Also,given a point p (x 1 , x 2,..., x d ), we dene
vector ~ p = [x 1, x 2,..., x d ]. Thus,the equation of 1 is ~ w ~
p = 1, and that of 2 is ~ w ~ p = 1. Note that| ~ w | = q P
d i =1 w
2i .
10 / 28 Yufei Tao Linear Classication: Maximizing the Margin
http://find/
-
8/9/2019 Lec5 Class Margin
11/28
Proof of Lemma 3Take an arbitrary point p 1 on 1 , and an
arbitrary poitn p 2 on 2 . Hence,
~ w ~ p 1 = 1 and ~ w ~ p 2 = 1. It follows that ~ w (~ p 1 ~ p
2) = 2.1
2
p 1
p 2
~ p 1 ~ p 2
~ w
The distance between the two planes is precisely ~ w | ~ w | (~
p 1 ~ p 2) = 2| ~ w | .
11 / 28 Yufei Tao Linear Classication: Maximizing the Margin
http://find/
-
8/9/2019 Lec5 Class Margin
12/28
In summary of the above, the essence of the large margin
separationproblem is essentially the following problem. We want to
nd w 1, ..., w d to minimize Pd i =1 w 2i (i.e., maximizing 2 P d i
=1 w 2i ) subject to thefollowing constraints:
For each red point p (x 1,..., x d ) in P :
w 1x 1 + w 2x 2 + ... + w d x d 1For each blue point p (x 1,...,
x d ) in P :
w 1x 1 + w 2x 2 + ... + w d x d 1.
This is an instance of quadratic programming .
12 / 28 Yufei Tao Linear Classication: Maximizing the Margin
http://find/
-
8/9/2019 Lec5 Class Margin
13/28
We will not go into the details of quadratic programming, except
tomention:
The instance of quadratic programming on the previous slide
ispolynomial-time solvable. The algorithm, however, is
exceedinglycomplex and falls out of the scope of the course.
There are standard packages online that will allow you to solve
theinstance within a reasonable amount of time, provided that
theinput set P is not too large.
13 / 28 Yufei Tao Linear Classication: Maximizing the Margin
http://find/
-
8/9/2019 Lec5 Class Margin
14/28
Finding an Approximate Plane
14 / 28 Yufei Tao Linear Classication: Maximizing the Margin
http://find/http://goback/
-
8/9/2019 Lec5 Class Margin
15/28
Since quadratic programming is complex and expensive, next we
tradeprecision for simplicity (and usually, also efficiency). Let
opt be themargin of the optimal solution to the large margin
separation problem.We say that a separation plane is c -approximate
if its margin is at least opt / c .
We will give a simple algorithm to nd a 4-approximate separation
plane.Here, the constant 4 is chosen to simplify our presentation.
In fact, ouralgorithm can be easily extended to obtain a (1 +
)-approximateseparation plane for any arbitrarily small > 0.
15 / 28 Yufei Tao Linear Classication: Maximizing the Margin
http://find/
-
8/9/2019 Lec5 Class Margin
16/28
Let us rst assume that we know a value satisfying opt (we
willclarify how to nd later). Recall that a separation plane has
theequation of c 1x 1 + c 2x 2 + ... + c d x d = 0. Dene vector ~ c
= [c 1, c 2,..., c d ],and refer to the plane as the plane
determined by ~ c . The goal is to nd agood ~ c .
Our weapon is once again Perceptron. The diff erence from before
is thatwe will now correct our ~ c not only when a point falls on
the wrong side
of the plane determined by ~ c , but also when the point is too
close to theplane. Specically, we say that a point p causes a
violation in any of thefollowing situations:
Its distance to the plane determined by ~ c is less than or
equal to / 2, regardless of the color.
p is red but ~ c ~ p < 0.
p is blue but ~ c ~ p > 0.
16 / 28 Yufei Tao Linear Classication: Maximizing the Margin
http://find/
-
8/9/2019 Lec5 Class Margin
17/28
Margin Perceptron
The algorithm starts with ~ c = [0, 0, ..., 0], and then runs in
iterations.
In each iteration, it simply checks whether any point in p P
causes aviolation. If so, the algorithm adjusts ~ c as follows:If p
is red, then ~ c
~ c + ~ p .
If p is blue, then ~ c ~ c ~ p .As soon as ~ c has been
adjusted, the current iteration nishes; and a newiteration
starts.
The algorithm nishes if no point causes any violation in the
currentiteration.
17 / 28 Yufei Tao Linear Classication: Maximizing the Margin
http://find/
-
8/9/2019 Lec5 Class Margin
18/28
Dene:
R = maxp P
{| ~ p |}
Namely, R is the maximum distance from the origin to the points
in P .
Theorem 4.Margin Perceptron always terminates in at most 1 + 8 R
2/ 2opt iterations.At termination, it returns a separation plane
with margin at least / 2.
The proof can be found in the appendix.
18 / 28 Yufei Tao Linear Classication: Maximizing the Margin
http://find/
-
8/9/2019 Lec5 Class Margin
19/28
Margin Perceptron requires a parameter opt . Theorem 4 tells
usthat the larger is, the better the quality guarantee is for the
returnedplane. Ideally, we would like to set = opt , which will
give us a2-approximate plane. Unfortunately, we do not know the
value of opt .
Next, we present a strategy that allows us to obtain an estimate
of opt that is off by at most a factor of 4. The strategy is to
start a low value of , and then gradually increases it until we are
sure that it is greater than opt already.
19 / 28 Yufei Tao Linear Classication: Maximizing the Margin
http://find/
-
8/9/2019 Lec5 Class Margin
20/28
An Incremental Algorithm
1 R the maximum distance from the origin to the points in P 2 an
arbitrary separation plane (obtained by, e.g., running theold
Perceptron algorithm or linear programming). Let 0 be the
margin of this plane.
3 1 4 0; i 1.4
Run Margin Perceptron with parameter i . If the algorithm
doesnot terminate after 1 + 8R 2
2i iterations, stop it manually. In this case,
we return as our nal answer.
5 Update to the plane returned by the algorithm. Let 0 be
themargin of .
6 i +1 4 0
7 i i + 1; Go to Line 4.
20 / 28 Yufei Tao Linear Classication: Maximizing the Margin
http://find/
-
8/9/2019 Lec5 Class Margin
21/28
Lemma 5.
Consider the i -th call to Margin Perceptron. If manual
terminationoccurs at Line 4, then i > opt . Otherwise, i +1 2 i
.
Proof.First consider the case of manual termination. If
opt , then by
Theorem 4, we know that Margin Perceptron should have terminated
inat most 1 + 8R
2
2opt 1 + 8R 2
2i iterations. Contradiction.
Now consider that Margin Perceptron terminated normally. Then,
byTheorem 4, 0 (the quality of the plane returned) must be at least
i / 2.
Hence, i +1 = 4 0
2 i .
21 / 28 Yufei Tao Linear Classication: Maximizing the Margin
http://find/
-
8/9/2019 Lec5 Class Margin
22/28
Corollary 6.The algorithm terminates after at most 1 + log 2
opt 0 calls to Margin
Perceptron.
Proof.
From the previous lemma, we know that i 2i 0. Suppose that
the
algorithm makes k calls to Margin Perceptron. Then, opt k 1
2
k 1 0. Solving k from the inequality gives thecorollary.
22 / 28 Yufei Tao Linear Classication: Maximizing the Margin
http://find/
-
8/9/2019 Lec5 Class Margin
23/28
Theorem 7.
Our incremental algorithm returns a separation plane with margin
at least opt / 4.
Proof.Suppose that the algorithm terminates after k calls to
MarginPerceptron. Hence:
k > opt
The plane we return eventually has quality k / 4, which is at
least
opt / 4.
23 / 28 Yufei Tao Linear Classication: Maximizing the Margin
http://find/
-
8/9/2019 Lec5 Class Margin
24/28
Appendix
24 / 28 Yufei Tao Linear Classication: Maximizing the Margin
http://find/
-
8/9/2019 Lec5 Class Margin
25/28
Proof of Theorem 4.Let ~ u ~ x = 0 be the optimal separation
plane with margin opt . Withoutloss of generality, suppose that |~
u | = 1. Hence:
opt = minp P
{|~ p ~ u |}
Recall that the perceptron algorithm adjusts ~ c in each
iteration. Let ~ c i (i 1) be the ~ c after the i -th iteration.
Also, let ~ c 0 = [0,..., 0] be theinitial ~ c before the rst
iteration. Also, let k be the total number of adjustments.
25 / 28 Yufei Tao Linear Classication: Maximizing the Margin
http://find/
-
8/9/2019 Lec5 Class Margin
26/28
Proof (cont.).
We claim that, for any i 0, ~ c i +1 ~ u ~ c i ~ u + opt . Due
to symmetry,we prove this only for the case where ~ c i +1 was
adjusted from ~ c i becauseof the violation of a red point ~ p
.
In this case, ~ c i +1 = ~ c i + ~ p ; and hence, ~ c i +1 ~ u =
~ c i ~ u + ~ p ~ u . From the
denition of opt , we know that ~ p ~ u opt . Therefore,~ c i +1
~ u ~ c i ~ u + opt .It follows that
|~ c k |
~ c k ~ u
k opt . (1)
26 / 28 Yufei Tao Linear Classication: Maximizing the Margin
P f ( )
http://find/
-
8/9/2019 Lec5 Class Margin
27/28
Proof (cont.).
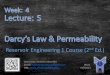
We also claim that, for any i 0, |~ c i +1 | |~ c i | + R 2
2|~ c i | + opt
2 . Due tosymmetry, we will prove this only for the case where ~
c i +1 was adjusted
from ~ c i due to the violation of a red point ~ p .~
ci
O(origin)
~
p
~
p1
~
p2
As shown above, ~ p = ~ p 1 + ~ p 2, where ~ p 1 is
perpendicular to ~ c i , and ~ p 2 isparallel to ~ c i (and hence,
perpendicular to the plane determined by ~ c i ).Therefore, ~ c i
+1 = ~ c i + ~ p = ~ c i + ~ p 1 + ~ p 2. The claim is true due
to:
By denition of violation, ~ p 2 is either is to the opposite of
~ c i or hasa norm of |~ p 2 | / 2 opt / 2.Notice that |~ p 1 | |~
p | R . Hence, |~ c i + ~ p 1 |2 = |~ c i |2 + |~ p 1 |2 |~ c i |2
+ R 2 (|~ c i | +
R 2
2|~ c i | )2. It thus follows that |~ c i + ~ p 1 | |~ c i |
+
R 2
2|~ c i | .
27 / 28 Yufei Tao Linear Classication: Maximizing the Margin
http://find/
-
8/9/2019 Lec5 Class Margin
28/28
Proof (cont.).
The claim on the previous slide implies that when |~ c i |
2R 2 opt ,
|~ c i +1 | |~ c i | + 3 opt 4 . Therefore:
|~ c k | 2R 2
opt +
3k opt 4
Combining the above and (1) gives:
k opt 2R 2
opt +
3k opt 4
k
8R 2
2opt .
28 / 28 Yufei Tao Linear Classication: Maximizing the Margin
http://find/