Embed Size (px)
Citation preview

Lecture 3: definition and theory of T-splines for IGA
G. Sangalli
University of Pavia & IMATI-CNR “E. Magenes”
5th European Women in Mathematics Summer School
June 2013 - ICTP Trieste
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 1 / 51

Motivation
Tensor product B-splines do not allow local mesh refinement, as in
T-spline Simplification and Local Refinement
Thomas W. Sederberg, David L. CardonG. Thomas Finnigan, Nicholas S. North
Brigham Young University
Jianmin ZhengNanyang Technological University
Tom LycheOslo University
Abstract
A typical NURBS surface model has a large percentage of super-fluous control points that significantly interfere with the design pro-cess. This paper presents an algorithm for eliminating such su-perfluous control points, producing a T-spline. The algorithm canremove substantially more control points than competing methodssuch as B-spline wavelet decomposition. The paper also presentsa new T-spline local refinement algorithm and answers two funda-mental open questions on T-spline theory.
CR Categories: I.3.5 [Computer Graphics]: Computational Ge-ometry and Object Modeling—curve, surface, solid and object rep-resentations;
Keywords: NURBS surfaces, T-splines, subdivision surfaces, lo-cal refinement, knot removal
1 Introduction
A serious weakness with NURBS models is that NURBS controlpoints must lie topologically in a rectangular grid. This means thattypically, a large number of NURBS control points serve no pur-pose other than to satisfy topological constraints. They carry nosignificant geometric information. In Figure 1.a, all the red NURBScontrol points are, in this sense, superfluous.
Figure 1: Head modeled (a) as a NURBS with 4712 control pointsand (b) as a T-spline with 1109 control points. The red NURBScontrol points are superfluous.
T-splines [Sederberg et al. 2003] are a generalization of NURBSsurfaces that are capable of significantly reducing the number ofsuperfluous control points. Figure 1.b shows a T-spline control gridwhich was obtained by eliminating the superfluous control pointsfrom the NURBS model. The main difference between a T-mesh(i.e., a T-spline control mesh) and a NURBS control mesh is that T-splines allow a row of control points to terminate. The final controlpoint in a partial row is called a T-junction. The T-junctions areshown in purple in Figure 1.b.
Figure 2: Car door modeled as a NURBS and as a T-spline.
Figure 2 shows another example in which the superfluous controlpoints in a NURBS are removed to create a T-spline. The T-splinemodel is geometrically equivalent to the NURBS model, yet hasonly 1/3 as many control points.
Figure 3: NURBS head model, converted to a T-spline.
Superfluous control points are a serious nuisance for designers,not merely because they require the designer to deal with more data,but also because they can introduce unwanted ripples in the surfaceas can be seen by comparing the forehead in the NURBS model inFigure 3.a with that of the T-spline model in Figure 3.b. Designerscan waste dozens of hours on models such as this in tweaking theNURBS control points while attempting to remove unwanted rip-ples. Figure 1.a shows a NURBS head model. Figure 1 shows the
(Courtesy of T. Sederberg)
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 2 / 51

Motivation
Tensor product B-splines do not allow local mesh refinement, as in
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 2 / 51

Motivation
Tensor product B-splines do not allow local mesh refinement, as in
103 10410−4
10−3
10−2
10−1
Degrees of freedomR
elat
ive
erro
r
T−splinesB−splinesy = C N −1.5
exact solution u ≈ grad(r2/3 sin 2θ/3 sin(πz)) (by R. Vazquez)
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 2 / 51

Motivation
Possible extensions:
Hierarchical splines [A.-V. Vuong, C. Giannelli, B. Juettler, B. Simeon, CMAME 2011] , . . .PS-Bsplines [H. Speleers, C. Manni, F. Pelosi, M. L. Sampoli, CMAME, 2012] , . . .T-splines [Sederberg, Cardon, Finnigan, North, Zheng, Lyche, 2004] , . . .LR-splines [T. Dokken, T. Lyche, K. F. Pettersen, CAGD, 2013] , . . .
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 3 / 51

Outline
Recalling again some definition on B-splines
Intro on T-splines for isogeometric analysisArbitrary degree T-splinesAS classDC class and propertiesEquivalence of AS and DCMaths properties for IGA
T-spline based differential forms
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 4 / 51

Univariate B-splines: a little change in notation
Given a non-uniform knot vector Ξ = ξ1, ..., ξn+p+1, B-spline are:
B0i,Ξ(s) =
1 if ξi ≤ s < ξi+1
0 otherwise.
Bp
i,Ξ(s) =s − ξi
ξi+p − ξi
Bp−1i,Ξ (s) +
ξi+p+1 − s
ξi+p+1 − ξi+1B
p−1i+1,Ξ(s).
New notation: B25,Ξ(s) = B2[2, 3, 4, 4](s) = Bp[
l.k.v.ξ ](s)
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 5 / 51

Univariate B-splines: a dual basisA dual basis is a set of functionals that give the spline coefficients:
f (s) =n
i=1
λi(f )Bi(s), ∀f ∈ Sp,Ξ
Various definitions are possible [deBoor, BOOK] , [L. L. Schumaker BOOK, 2007] , e.g. in“Standard and Non-Standard CAGD Tools for Isogeometric Analysis: aTutorial” by Carla Manni and Hendrik Speleers.
The dual basis also depends locally on the knot vector. Using a similarnotation as in the previous slide we will denote it as λp[ξ].
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 6 / 51

Univariate B-splines: a dual basisA dual basis is a set of functionals that give the spline coefficients:
f (s) =n
i=1
λi(f )Bi(s), ∀f ∈ Sp,Ξ
Various definitions are possible [deBoor, BOOK] , [L. L. Schumaker BOOK, 2007] , e.g. in“Standard and Non-Standard CAGD Tools for Isogeometric Analysis: aTutorial” by Carla Manni and Hendrik Speleers.
The dual basis also depends locally on the knot vector. Using a similarnotation as in the previous slide we will denote it as λp[ξ].
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 6 / 51

Univariate B-splines: a dual basisA dual basis is a set of functionals that give the spline coefficients:
f (s) =n
i=1
λi(f )Bi(s), ∀f ∈ Sp,Ξ
Various definitions are possible [deBoor, BOOK] , [L. L. Schumaker BOOK, 2007] , e.g. in“Standard and Non-Standard CAGD Tools for Isogeometric Analysis: aTutorial” by Carla Manni and Hendrik Speleers.
The dual basis also depends locally on the knot vector. Using a similarnotation as in the previous slide we will denote it as λp[ξ].
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 6 / 51

Univariate B-splines: a dual basisA dual basis is a set of functionals that give the spline coefficients:
f (s) =n
i=1
λi(f )Bi(s), ∀f ∈ Sp,Ξ
Various definitions are possible [deBoor, BOOK] , [L. L. Schumaker BOOK, 2007] , e.g. in“Standard and Non-Standard CAGD Tools for Isogeometric Analysis: aTutorial” by Carla Manni and Hendrik Speleers.
The dual basis also depends locally on the knot vector. Using a similarnotation as in the previous slide we will denote it as λp[ξ].
I adopt here a “function representation”:
λp[ξ](f ) =
Rf (s)λp[ξ](s)ds
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 6 / 51

Univariate B-splines: a dual basisA dual basis is a set of functionals that give the spline coefficients:
f (s) =n
i=1
λi(f )Bi(s), ∀f ∈ Sp,Ξ
Various definitions are possible [deBoor, BOOK] , [L. L. Schumaker BOOK, 2007] , e.g. in“Standard and Non-Standard CAGD Tools for Isogeometric Analysis: aTutorial” by Carla Manni and Hendrik Speleers.
The dual basis also depends locally on the knot vector. Using a similarnotation as in the previous slide we will denote it as λp[ξ].
This is a dual basis in the sense that
RBp[ξ
A]λp[ξA] = 1,
A = B ⇒
RBp[ξ
A]λp[ξB] = 0,
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 6 / 51

Bivariate B-splines: new notation
Bivariate B-splinesTensor product B-splines are defined as
BAp,q(s, t) = Bp[ξ
A1 ](s) Bq[ηA2 ](t)
and span the space Sp,q := Sp ⊗ Sq
Tensor product dual functions are defined as
λAp,q = λp[ξ
A1 ] λq[ηA2 ].
we still have the duality poperty:
R2B
Ap,qλ
Ap,q =
RBp[ξ
A1 ]λp[ξA1 ]
RBq[η
A2 ]λq[ηA2 ] = 1
A = B ⇒
R2B
Ap,qλ
Bp,q =
RBp[ξ
A1 ]λp[ξB1 ]
RBq[η
A2 ]λq[ηB2 ] = 0.
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 7 / 51

T-splines, from www.tsplines.com
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 8 / 51

T-splines, from www.tsplines.com
T-splines are an extension of tensor-product NURBS:allow local refinementallow accurate patch unionallow more flexibilityfrom CAD [Sederberg et al., ACM SIGGRAPH 2003-04] ......to IGA [Bazilevs, Calo, Cottrell, Evans, Hughes, Lipton, Scott, Sederberg, CMAME, 2010]
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 8 / 51

T-splines, from www.tsplines.com
To use T-splines in IGA we needa restriction: Analysis-Suitable class [Li, Zheng, Sederberg, Scott, Hughes, CAGD, 2012] ,a generalization to arbitrary-degree [Finnigan, PhD , 2008] ,[Bazilevs, Calo, Cottrell, Evans,
Hughes, Lipton, Scott, Sederberg, CMAME 2010] ,a generalization to 3D and unstructured meshes [Wang, Zhang, Liu, Hughes,
CAD, 2012]
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 8 / 51

T-splines, from www.tsplines.com
To use T-splines in IGA we needa restriction: Analysis-Suitable class [Li, Zheng, Sederberg, Scott, Hughes, CAGD, 2012] ,a generalization to arbitrary-degree [Finnigan, PhD , 2008] ,[Bazilevs, Calo, Cottrell, Evans,
Hughes, Lipton, Scott, Sederberg, CMAME 2010] ,a generalization to 3D and unstructured meshes [Wang, Zhang, Liu, Hughes,
CAD, 2012]
→[Beirão da Veiga,Buffa, GS, Vázquez, M3AS, 2013]
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 8 / 51

T-splines, from www.tsplines.com
Two important features of IGA:
(k , p)-refinement + local h-refinement
smooth discrete “differential forms”+ local h-refinement[Buffa, GS, Vázquez, JCP, submitted]
From here the interest for arbitrary degree AS T-splines
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 8 / 51

Cubic T-spline meshes
−2 −1 0 1 2 3 4 5 6 7 8 9 10 11−2
−1
0
1
2
3
4
5
6
7
8
9
10
A T-mesh M in the index space. Indices are associated to knots:
ξ−2 = ξ−1 = ξ0 < ξ1 ≤ ξ2 ≤ ... ≤ ξ8 < ξ9 = ξ10 = ξ11
η−2 = η−1 = η0 < η1 ≤ η2 ≤ ... ≤ η7 < η8 = η9 = η10
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 9 / 51

Cubic T-spline meshes
−2 −1 0 1 2 3 4 5 6 7 8 9 10 11−2−1012345678910
To each vertex (anchor) of M, we associate a cubic bivariate B-spline,defined by its horizontal and vertical local knot vectors
BA
3,3(s, t) = B3[ξ−1, ξ0, ξ1, ξ2, ξ3](s) B3[η0, η1, η3, η4, η6](t)
BB
3,3(s, t) = B3[ξ4, ξ5, ξ6, ξ7, ξ8](s) B3[η1, η2, η4, η5, η7](t)
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 9 / 51

Cubic T-spline meshes
−2 −1 0 1 2 3 4 5 6 7 8 9 10 11−2−1012345678910
To each vertex (anchor) of M, we associate a cubic bivariate B-spline,defined by its horizontal and vertical local knot vectors
BA
3,3(s, t) = B3[ξ−1, ξ0, ξ1, ξ2, ξ3](s) B3[η0, η1, η3, η4, η6](t)
BB
3,3(s, t) = B3[ξ4, ξ5, ξ6, ξ7, ξ8](s) B3[η1, η2, η4, η5, η7](t)
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 9 / 51

Definition of arbitrary-degree T-splines
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 10 / 51

T-splines of arbitrary degree (p,q)
A bivariate T-spline of degree (p, q)
Bp,q[ξ,η](s, t) = Bp[ξ](s) Bq[η](t)
is defined by (p + 2) horizontal knot values ξ and (q + 2) vertical knotvalues η for the t−coordinate.
Anchors indicate the center of the local knot vectors, then:
p q anchorsodd odd vertexeseven odd horizontal edgesodd even vertical edgeseven even elements
Similar to: [Finnigan, PhD , 2008] ,[Bazilevs, Calo, Cottrell, Evans, Hughes, Lipton, Scott, Sederberg, CMAME 2010]
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 11 / 51

T-splines of arbitrary degree (p,q)
A bivariate T-spline of degree (p, q)
Bp,q[ξ,η](s, t) = Bp[ξ](s) Bq[η](t)
is defined by (p + 2) horizontal knot values ξ and (q + 2) vertical knotvalues η for the t−coordinate.
Anchors indicate the center of the local knot vectors, then:
p q anchorsodd odd vertexeseven odd horizontal edgesodd even vertical edgeseven even elements
Similar to: [Finnigan, PhD , 2008] ,[Bazilevs, Calo, Cottrell, Evans, Hughes, Lipton, Scott, Sederberg, CMAME 2010]
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 11 / 51

T-splines of arbitrary degree (p,q)
A bivariate T-spline of degree (p, q)
Bp,q[ξ,η](s, t) = Bp[ξ](s) Bq[η](t)
is defined by (p + 2) horizontal knot values ξ and (q + 2) vertical knotvalues η for the t−coordinate.
Anchors indicate the center of the local knot vectors, then:
p q anchorsodd odd vertexeseven odd horizontal edgesodd even vertical edgeseven even elements
Similar to: [Finnigan, PhD , 2008] ,[Bazilevs, Calo, Cottrell, Evans, Hughes, Lipton, Scott, Sederberg, CMAME 2010]
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 11 / 51

The odd-odd case (the simplest to generalize)Let for example p = q = 5.
−3 −2 −1 0 1 2 3 4 5 6 7 8 9 10 11 12−3−2−101234567891011
BA5,5(s, t) = B5[ξ2, ξ4, ξ5, ξ6, ξ7, ξ8, ξ9](s) B5[η0, η1, η2, η4, η5, η7, η8](t)
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 12 / 51

The odd-odd case (the simplest to generalize)Let for example p = q = 5.
−3 −2 −1 0 1 2 3 4 5 6 7 8 9 10 11 12−3−2−101234567891011
BA5,5(s, t) = B5[ξ2, ξ4, ξ5, ξ6, ξ7, ξ8, ξ9](s) B5[η0, η1, η2, η4, η5, η7, η8](t)
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 12 / 51

The even-odd ad odd-even casesWe consider the case p = 3, q = 2.
−2 −1 0 1 2 3 4 5 6 7 8 9 10 11−1
0
1
2
3
4
5
6
7
8
9
BA
3,2(s, t) = B3[ξ−1, ξ0, ξ1, ξ3, ξ4](s) B3[η6, η7, η8, η9](t)
BB
3,2(s, t) = B3[ξ2, ξ5, ξ6, ξ7, ξ8](s) B3[η1, η2, η4, η5](t)
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 13 / 51

The even-odd ad odd-even casesWe consider the case p = 3, q = 2.
−2 −1 0 1 2 3 4 5 6 7 8 9 10 11−1
0
1
2
3
4
5
6
7
8
9
BA
3,2(s, t) = B3[ξ−1, ξ0, ξ1, ξ3, ξ4](s) B3[η6, η7, η8, η9](t)
BB
3,2(s, t) = B3[ξ2, ξ5, ξ6, ξ7, ξ8](s) B3[η1, η2, η4, η5](t)
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 13 / 51

The even-even caseLet for example p = 2, q = 2.
−1 0 1 2 3 4 5 6 7 8 9 10−1
0
1
2
3
4
5
6
7
8
9
BA
2,2(s, t) = B3[ξ0, ξ1, ξ3, ξ4](s) B3[η6, η7, η8, η9](t)
BB
2,2(s, t) = B3[ξ2, ξ5, ξ6, ξ7](s) B3[η0, η2, η4, η5](t)
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 14 / 51

The even-even caseLet for example p = 2, q = 2.
−1 0 1 2 3 4 5 6 7 8 9 10−1
0
1
2
3
4
5
6
7
8
9
BA
2,2(s, t) = B3[ξ0, ξ1, ξ3, ξ4](s) B3[η6, η7, η8, η9](t)
BB
2,2(s, t) = B3[ξ2, ξ5, ξ6, ξ7](s) B3[η0, η2, η4, η5](t)
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 14 / 51

Definition of AS T-splines
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 15 / 51

Analysis Suitable T-splines of p, q degreeExtensions: every horizontal ( and ) (resp. vertical (⊥ and ))T-junction is extended by p/2-bays (resp., q/2-bays) forward(called face extension) and by p/2-bays (resp., q/2-bays)backward (called edge extension). All extensions are closed lines.
Example for p=2, q=3:
Definition of Analysis Suitable (AS)A T-mesh is ASp,q if no horizontal T-junction extension intersects avertical T-junction extension.
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 16 / 51

Definition of DC T-splines
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 17 / 51

Overlapping index vectors
Two local index vector may be coincident, different and overlapping ordifferent and non-overlapping (staggered):
overlapping
non-overlapping
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 18 / 51

Overlapping B-splines (p = q = 3)
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 19 / 51

Overlapping B-splines (p = q = 3)
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 20 / 51

Non overlapping T-splines (p = q = 3)
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 21 / 51

Non overlapping T-splines (p = q = 3)
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 22 / 51

Overlapping (in one direction) T-splines (p = q = 3)
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 23 / 51

Overlapping (in one direction) T-splines (p = q = 3)
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 24 / 51

Dual Compatible T-splines
Definition of Dual Compatible (DC)A given T-mesh M is DCp,q if for any two different T-splines there is adirection (either horizontal or vertical) such that the two local indexvectors in that direction are overlapping and do not coincide
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 25 / 51

Dual Compatible T-splines
Definition of Dual Compatible (DC)A given T-mesh M is DCp,q if for any two different T-splines there is adirection (either horizontal or vertical) such that the two local indexvectors in that direction are overlapping and do not coincide
Equivalent definition in 2DA given T-mesh M is DCp,q ifany pair of T-splines hasoverlapping index vectors,either horizontally or vertically.
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 25 / 51

Dual Compatible T-splines
Definition of Dual Compatible (DC)A given T-mesh M is DCp,q if for any two different T-splines there is adirection (either horizontal or vertical) such that the two local indexvectors in that direction are overlapping and do not coincide
Given any anchor A we associate a B-spline BAp,q = Bp[ξ
A] Bq[ηA] and
the "dual" function: λAp,q = λp[ξ
A] λq[ηA].
This is a dual basis for tensor product B-splines:
R2B
Ap,qλ
Ap,q =
RBp[ξ
A]λp[ξA]
RBq[η
A]λq[ηA] = 1,
A = B ⇒
R2B
Ap,qλ
Bp,q =
RBp[ξ
A]λp[ξB]
RBq[η
A]λq[ηB] = 0,
[deBoor, 1976] , [Lyche, JAT, 1978] ,[L. L. Schumaker BOOK, 2007] .G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 25 / 51

Dual Compatible T-splines
Definition of Dual Compatible (DC)A given T-mesh M is DCp,q if for any two different T-splines there is adirection (either horizontal or vertical) such that the two local indexvectors in that direction are overlapping and do not coincide
Given any anchor A we associate a B-spline BAp,q = Bp[ξ
A] Bq[ηA] and
the "dual" function: λAp,q = λp[ξ
A] λq[ηA].
If the T-mesh is DCp,q, we still have
R2B
Ap,qλ
Ap,q = 1
A = B ⇒
R2B
Ap,qλ
Bp,q =
RBp[ξ
A]λp[ξB]
RBq[η
A]λq[ηB] = 0,
Then λAp,qA is still a dual basis !!.
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 25 / 51

Properties of DC T-splines
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 26 / 51

Properties of DC T-splines
Linear independenceThe T-splines generated by M ∈ DCp,q are a basis for Tp,q(M).
Partition of unityThe basis above is a partition of unity.
ApproximationThe operator Π : L2 → Tp,q(M) defined by
f → Π(f ) =
anchors A
R2λA
p,qf
B
Ap,q
satisfies ||f − Π(f )||L2 ≤ Chmin (p,q)+1|f |Hmin (p,q)+1 .
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 27 / 51

Properties of DC T-splines
Linear independenceThe T-splines generated by M ∈ DCp,q are a basis for Tp,q(M).
Dim:
anchors A
CAB
Ap,q(·) = 0
⇓
R2λB
p,q
anchors A
CAB
Ap,q
= 0
⇓C
B = 0
Partition of unityThe basis above is a partition of unity.
ApproximationThe operator Π : L2 → Tp,q(M) defined by
f → Π(f ) =
anchors A
R2λA
p,qf
B
Ap,q
satisfies ||f − Π(f )||L2 ≤ Chmin (p,q)+1|f |Hmin (p,q)+1 .
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 27 / 51

Properties of DC T-splines
Linear independenceThe T-splines generated by M ∈ DCp,q are a basis for Tp,q(M).
Partition of unityThe basis above is a partition of unity.
ApproximationThe operator Π : L2 → Tp,q(M) defined by
f → Π(f ) =
anchors A
R2λA
p,qf
B
Ap,q
satisfies ||f − Π(f )||L2 ≤ Chmin (p,q)+1|f |Hmin (p,q)+1 .
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 27 / 51

Properties of DC T-splines
Linear independenceThe T-splines generated by M ∈ DCp,q are a basis for Tp,q(M).
Partition of unityThe basis above is a partition of unity.
Dim:
anchors A
CAB
Ap,q(·) = 1
⇓
R2λB
p,q
anchors A
CAB
Ap,q
=
R2λB
p,q
⇓C
B = 1
ApproximationThe operator Π : L2 → Tp,q(M) defined by
f → Π(f ) =
anchors A
R2λA
p,qf
B
Ap,q
satisfies ||f − Π(f )||L2 ≤ Chmin (p,q)+1|f |Hmin (p,q)+1 .
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 27 / 51

Properties of DC T-splines
Linear independenceThe T-splines generated by M ∈ DCp,q are a basis for Tp,q(M).
Partition of unityThe basis above is a partition of unity.
ApproximationThe operator Π : L2 → Tp,q(M) defined by
f → Π(f ) =
anchors A
R2λA
p,qf
B
Ap,q
satisfies ||f − Π(f )||L2 ≤ Chmin (p,q)+1|f |Hmin (p,q)+1 .
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 27 / 51

The origin of the concept of DC T-splines
The idea originates from the analysis of “IsoGeometric analysis usingT-splines on two-patch geometries” [Beirão da Veiga, Buffa, Cho, GS, CMAME 2011]
simplest possible T-spline space and geometry.
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 28 / 51

AS is equivalent to DC
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 29 / 51

AS is equivalent to DC
Theorem [Beirão da Veiga,Buffa, Cho, GS, CMAME 2012] - [Beirão da Veiga,Buffa, GS, Vázquez, M3AS,2013]
ASp,q = DCp,q.
To summarize, for a given T-mesh M :
M ∈ ASp,q ⇔ M ∈ DCp,q ⇒
T-splines are a basisT-splines are a p.o.u.Tp,q(M) has optimal approx.
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 30 / 51

AS is equivalent to DC
Theorem [Beirão da Veiga,Buffa, Cho, GS, CMAME 2012] - [Beirão da Veiga,Buffa, GS, Vázquez, M3AS,2013]
ASp,q = DCp,q.
To summarize, for a given T-mesh M :
M ∈ ASp,q ⇔ M ∈ DCp,q ⇒
T-splines are a basisT-splines are a p.o.u.Tp,q(M) has optimal approx.
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 30 / 51

Proving theorem for arbitrary-degree T-splinesInduction argument:
if ℘0,0 and∀p
| 0 ≤ p < p, ℘p,q ⇒ ℘p,q,
∀q | 0 ≤ q
< q, ℘p,q ⇒ ℘p,q.then ∀p, q,℘p,q.
For example ℘p,q = “ Let M ∈ ASp,q and T a T-splines defined on M.Then there are no vertices of M in the interior of the (p + 1)× (q + 1)elements of T .”
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 31 / 51

Proving theorem for arbitrary-degree T-splinesInduction argument:
if ℘0,0 and∀p
| 0 ≤ p < p, ℘p,q ⇒ ℘p,q,
∀q | 0 ≤ q
< q, ℘p,q ⇒ ℘p,q.then ∀p, q,℘p,q.
For example ℘p,q = “ Let M ∈ ASp,q and T a T-splines defined on M.Then there are no vertices of M in the interior of the (p + 1)× (q + 1)elements of T .”
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 31 / 51

Proving theorem for arbitrary-degree T-splinesInduction argument:
if ℘0,0 and∀p
| 0 ≤ p < p, ℘p,q ⇒ ℘p,q,
∀q | 0 ≤ q
< q, ℘p,q ⇒ ℘p,q.then ∀p, q,℘p,q.
For example ℘p,q = “ Let M ∈ ASp,q and T a T-splines defined on M.Then there are no vertices of M in the interior of the (p + 1)× (q + 1)elements of T .”
A
γ
A1 A2
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 31 / 51

Proving theorem for arbitrary-degree T-splinesInduction argument:
if ℘0,0 and∀p
| 0 ≤ p < p, ℘p,q ⇒ ℘p,q,
∀q | 0 ≤ q
< q, ℘p,q ⇒ ℘p,q.then ∀p, q,℘p,q.
For example ℘p,q = “ Let M ∈ ASp,q and T a T-splines defined on M.Then there are no vertices of M in the interior of the (p + 1)× (q + 1)elements of T .”
A
γ
A1 A2
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 31 / 51

Proving theorem for arbitrary-degree T-splinesInduction argument:
if ℘0,0 and∀p
| 0 ≤ p < p, ℘p,q ⇒ ℘p,q,
∀q | 0 ≤ q
< q, ℘p,q ⇒ ℘p,q.then ∀p, q,℘p,q.
For example ℘p,q = “ Let M ∈ ASp,q and T a T-splines defined on M.Then there are no vertices of M in the interior of the (p + 1)× (q + 1)elements of T .”
Aγ1 γ2 A1 A2
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 31 / 51

Proving theorem for arbitrary-degree T-splinesInduction argument:
if ℘0,0 and∀p
| 0 ≤ p < p, ℘p,q ⇒ ℘p,q,
∀q | 0 ≤ q
< q, ℘p,q ⇒ ℘p,q.then ∀p, q,℘p,q.
For example ℘p,q = “ Let M ∈ ASp,q and T a T-splines defined on M.Then there are no vertices of M in the interior of the (p + 1)× (q + 1)elements of T .”
A
γ1 γ2A1 A2
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 31 / 51

DCp,q is easy to generalize
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 32 / 51

Abstract definition of DCp,q
A set of B-splines fulfills DCp,q if given two different B-splines in the setthere is a direction such that the two local index vectors in thatdirection are overlapping and do not coincide
The definition above can be extended to:
trivariate splinesLR-splines [Dokken, Lyche, Pettersen, CAGD, 2013]
It allows to use the classical dual basis and get:partition of unity (with proper scaling of the basis)linear independenceGreville abscissae = interior knots averageapproximation properties
provided the polynomials belong to the space.
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 33 / 51

Abstract definition of DCp,q
A set of B-splines fulfills DCp,q if given two different B-splines in the setthere is a direction such that the two local index vectors in thatdirection are overlapping and do not coincide
The definition above can be extended to:
trivariate splinesLR-splines [Dokken, Lyche, Pettersen, CAGD, 2013]
It allows to use the classical dual basis and get:partition of unity (with proper scaling of the basis)linear independenceGreville abscissae = interior knots averageapproximation properties
provided the polynomials belong to the space.
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 33 / 51

Abstract definition of DCp,q
A set of B-splines fulfills DCp,q if given two different B-splines in the setthere is a direction such that the two local index vectors in thatdirection are overlapping and do not coincide
The definition above can be extended to:
trivariate splinesLR-splines [Dokken, Lyche, Pettersen, CAGD, 2013]
It allows to use the classical dual basis and get:partition of unity (with proper scaling of the basis)linear independenceGreville abscissae = interior knots averageapproximation properties
provided the polynomials belong to the space.
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 33 / 51

Differential forms based on AS T-splines
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 34 / 51

Discrete differential forms
Goal: T-splines discretizations of the sequence:
H1(Ω)/R grad−−−−→ H(curl;Ω) curl−−−−→ H(div;Ω) div−−−−→ L2(Ω) .
It is a generalization of the finite element sequence:
Nodal FE grad−−−−→ Edge FE curl−−−−→ Face FE div−−−−→ Discont. FE .
Applications: electromagnetics, Darcy’s flow, Navier-Stokes...
[Buffa, GS, Vazquez, 2010-2012] , [Buffa, De Falco, GS, 2011] , [Evans, Hughes 2012-2013] ...
Today I consider only the 2D sequence:
H1(Ω)/R grad−−−−→ H(curl ,Ω) curl−−−−→ L2(Ω) .
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 35 / 51

Discrete differential forms
Goal: T-splines discretizations of the sequence:
H1(Ω)/R grad−−−−→ H(curl;Ω) curl−−−−→ H(div;Ω) div−−−−→ L2(Ω) .
It is a generalization of the finite element sequence:
Nodal FE grad−−−−→ Edge FE curl−−−−→ Face FE div−−−−→ Discont. FE .
Applications: electromagnetics, Darcy’s flow, Navier-Stokes...
[Buffa, GS, Vazquez, 2010-2012] , [Buffa, De Falco, GS, 2011] , [Evans, Hughes 2012-2013] ...
Today I consider only the 2D sequence:
H1(Ω)/R grad−−−−→ H(curl ,Ω) curl−−−−→ L2(Ω) .
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 35 / 51

Discrete differential forms
Goal: T-splines discretizations of the sequence:
H1(Ω)/R grad−−−−→ H(curl;Ω) curl−−−−→ H(div;Ω) div−−−−→ L2(Ω) .
It is a generalization of the finite element sequence:
Nodal FE grad−−−−→ Edge FE curl−−−−→ Face FE div−−−−→ Discont. FE .
Applications: electromagnetics, Darcy’s flow, Navier-Stokes...
[Buffa, GS, Vazquez, 2010-2012] , [Buffa, De Falco, GS, 2011] , [Evans, Hughes 2012-2013] ...
Today I consider only the 2D sequence:
H1(Ω)/R grad−−−−→ H(curl ,Ω) curl−−−−→ L2(Ω) .
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 35 / 51

Univariate B-splines: derivatives
Sp(Ξ): space of B-splines of degree p on the open knot vector Ξ.Ξ = ξ1 = · · · = ξp+1 < ξp+2 ≤ · · · ≤ ξn < ξn+1 = · · · = ξn+p+1
B-splines derivatives are splines as well, in the space Sp−1(Ξ):
Ξ = ξ2 = · · · = ξp+1 < ξp+2 ≤ · · · ≤ ξn < ξn+1 = · · · = ξn+p
The derivative is (BAp )
= DA−p−1 − DA+
p−1, with DA±p−1 = p
|supp(BA±p−1)|
BA±p−1.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8−4
−3
−2
−1
0
1
2
3
4
(BAp)’
DA−
p−1
−DA+
p−1
A− A A+
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 36 / 51

Tensor-product spline differential forms [Buffa, GS, Vazquez, 2010-2012]
Recall the 2D diagram:
H1(Ω)/R grad−−−−→ H(curl ;Ω) curl−−−−→ L2(Ω) .
In the parametric domain Ω =square, we have the exact sequence:
Sp,p/Rgrad−−−−→ (Sp−1,p,Sp,p−1)
curl−−−−→ Sp−1,p−1
X 0 = Sp,p ≡ Sp(Ξ1)⊗ Sp(Ξ2)
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 37 / 51

Tensor-product spline differential forms [Buffa, GS, Vazquez, 2010-2012]
Recall the 2D diagram:
H1(Ω)/R grad−−−−→ H(curl ;Ω) curl−−−−→ L2(Ω) .
In the parametric domain Ω =square, we have the exact sequence:
Sp,p/Rgrad−−−−→ (Sp−1,p,Sp,p−1)
curl−−−−→ Sp−1,p−1
X 0 = Sp,p ≡ Sp(Ξ1)⊗ Sp(Ξ2)
X 1 = (Sp−1,p,Sp,p−1) ≡ (Sp−1(Ξ1)⊗ Sp(Ξ2))× (Sp(Ξ1)⊗ Sp−1(Ξ
2))
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 37 / 51

Tensor-product spline differential forms [Buffa, GS, Vazquez, 2010-2012]
Recall the 2D diagram:
H1(Ω)/R grad−−−−→ H(curl ;Ω) curl−−−−→ L2(Ω) .
In the parametric domain Ω =square, we have the exact sequence:
Sp,p/Rgrad−−−−→ (Sp−1,p,Sp,p−1)
curl−−−−→ Sp−1,p−1
X 0 = Sp,p ≡ Sp(Ξ1)⊗ Sp(Ξ2)
X 1 = (Sp−1,p,Sp,p−1) ≡ (Sp−1(Ξ1)⊗ Sp(Ξ2))× (Sp(Ξ1)⊗ Sp−1(Ξ
2))
X 2 = Sp−1,p−1 ≡ Sp−1(Ξ1)⊗ Sp−1(Ξ
2)
The next step is to map them to the physical domain.
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 37 / 51

Tensor-product spline differential forms [Buffa, GS, Vazquez, 2010-2012]
Recall the 2D diagram:
H1(Ω)/R grad−−−−→ H(curl ;Ω) curl−−−−→ L2(Ω) .
In the parametric domain Ω =square, we have the exact sequence:
Sp,p/Rgrad−−−−→ (Sp−1,p,Sp,p−1)
curl−−−−→ Sp−1,p−1
Use structure preserving push-forward.
X 0/R grad−−−−→ X 1 curl−−−−→ X 2
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 37 / 51

Tensor-product spline differential forms [Buffa, GS, Vazquez, 2010-2012]
Recall the 2D diagram:
H1(Ω)/R grad−−−−→ H(curl ;Ω) curl−−−−→ L2(Ω) .
In the parametric domain Ω =square, we have the exact sequence:
Sp,p/Rgrad−−−−→ (Sp−1,p,Sp,p−1)
curl−−−−→ Sp−1,p−1
Use structure preserving push-forward.
X 0/R grad−−−−→ X 1 curl−−−−→ X 2
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 37 / 51

Tensor-product spline differential forms [Buffa, GS, Vazquez, 2010-2012]
Recall the 2D diagram:
H1(Ω)/R grad−−−−→ H(curl ;Ω) curl−−−−→ L2(Ω) .
In the parametric domain Ω =square, we have the exact sequence:
Sp,p/Rgrad−−−−→ (Sp−1,p,Sp,p−1)
curl−−−−→ Sp−1,p−1
Use structure preserving push-forward.
X 0/R grad−−−−→ X 1 curl−−−−→ X 2
X0 = φ : φ F ∈ X
0, standard mapping,X
1 = u : (DF)(u F) ∈ X1, curl-conserving mapping,
X2 = ϕ : det(DF)(ϕ F) ∈ X
2, integral preserving mapping.
F is the geometry parametrization of Ω.
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 37 / 51

T-splines differential forms: odd degree
Recall the univariate derivative: (BAp )
= DA−p−1 − DA+
p−1:
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 38 / 51

T-splines differential forms: odd degree
Recall the univariate derivative: (BAp )
= DA−p−1 − DA+
p−1:
Start with an AS T-mesh M0, and the space Y 0 = Tp,p(M0):
Odd degree: anchors are associated with the vertices.
The space Y 1 must contain the gradient of these functions.
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 38 / 51

T-splines differential forms: odd degree
Recall the univariate derivative: (BAp )
= DA−p−1 − DA+
p−1:
Start with an analysis suitable T-mesh M0, and the spaceY 0 = Tp,p(M0).
∂∂x−→
Degree (even,odd): anchors associated with the horizontal edges.
New mesh, M1∂x
: added one extension of all horizontal T-junctions.The first component of Y 1 is the T-spline space: Tp−1,p(M1
∂x).
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 38 / 51

T-splines differential forms: odd degree
Recall the univariate derivative: (BAp )
= DA−p−1 − DA+
p−1:
Start with an analysis suitable T-mesh M0, and the spaceY 0 = Tp,p(M0).
∂∂x−→
Degree (even,odd): anchors associated with the horizontal edges.New mesh, M1
∂x: added one extension of all horizontal T-junctions.
The first component of Y 1 is the T-spline space: Tp−1,p(M1∂x).
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 38 / 51

T-splines differential forms: odd degree
Recall the univariate derivative: (BAp )
= DA−p−1 − DA+
p−1:
Start with an analysis suitable T-mesh M0, and the spaceY 0 = Tp,p(M0).
∂∂y−→
Degree (odd,even): anchors associated with the vertical edges.New mesh, M1
∂y: added one extension of all vertical T-junctions.
The second component of Y 1 is the T-spline space: Tp,p−1(M1∂y).
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 38 / 51

T-splines differential forms: odd degree
Recall the univariate derivative: (BAp )
= DA−p−1 − DA+
p−1:
Start with an analysis suitable T-mesh M0, and the spaceY 0 = Tp,p(M0).
∂2∂x∂y−→
Degree (even,even): anchors associated with the elements.New mesh, M2: added one extension of all T-junctions.The third space is Y 2 = Tp−1,p−1(M2).
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 38 / 51

T-splines differential forms: odd degree (II)
We have constructed the meshes and spaces for the sequence
Tp,p(M0)/R grad−−−−→ (Tp−1,p(M1∂x),Tp,p−1(M1
∂y))
curl−−−−→ Tp−1,p−1(M2)
If M0 is AS, then M1∂x
, M1∂y
and M2 are AS.
Theorem ([Buffa, GS, Vázquez, submitted to JCP] )
If M0 is analysis suitable, then the sequence is exact.
based on polynomial characterization of T-spline spaces,we are currently constructing the stable commuting interpolators,the Bézier mesh is the same in the four spaces,works for any p, odd and even,mapping to the physical domain done as for B-splines/NURBS.
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 39 / 51

T-splines differential forms: odd degree (II)
We have constructed the meshes and spaces for the sequence
Tp,p(M0)/R grad−−−−→ (Tp−1,p(M1∂x),Tp,p−1(M1
∂y))
curl−−−−→ Tp−1,p−1(M2)
If M0 is AS, then M1∂x
, M1∂y
and M2 are AS.
Theorem ([Buffa, GS, Vázquez, submitted to JCP] )
If M0 is analysis suitable, then the sequence is exact.
based on polynomial characterization of T-spline spaces,we are currently constructing the stable commuting interpolators,the Bézier mesh is the same in the four spaces,works for any p, odd and even,mapping to the physical domain done as for B-splines/NURBS.
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 39 / 51

Numerical tests in 2D: the square domain
We test Y 1 on the eigenvalue problem
curl curl u = ω2u, ω = 0, u = 0.
Unit square domain , with T-mesh as below:
0 10 20 30 40 50 600
10
20
30
40
50
60
Rank in the (non−null) spectrum
Eige
nval
ue
Degree 4Degree 5Exact
The computed spectrum is spurious free for any degree.Good approximation of eigenvalues with the right multiplicity.
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 40 / 51

2D numerical tests: the L-shaped domain
We discretize with the space Y 1 the eigenvalue problem
curl curl u = ω2u, ω = 0, u = 0.
L-shaped domain, in a mesh refined towards the corner.
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 41 / 51

2D numerical tests: the L-shaped domain
We discretize with the space Y 1 the eigenvalue problem
curl curl u = ω2u, ω = 0, u = 0.
L-shaped domain, in a mesh refined towards the corner.
102 103 104 10510−10
10−9
10−8
10−7
10−6
10−5
10−4
10−3
Degrees of freedom
Rel
ativ
e er
ror
T−splinesB−splinesy = CN−4
102 103 104 10510−10
10−9
10−8
10−7
10−6
10−5
10−4
10−3
Degrees of freedom
Rel
ativ
e er
ror
T−splinesB−splinesy = CN−5
Convergence results for degrees 4 and 5.Better approximation properties than B-splines.
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 41 / 51

Three dimensional domains
We extend to 3D, assuming that we don’t need local refinement in z.
Y 0/R grad−−−−→ Y 1 curl−−−−→ Y 2 div−−−−→ Y 3
The idea is to use 2D T-splines in the first two directions.
In the third direction we use univariate B-splines.
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 42 / 51

Three dimensional domains
We extend to 3D, assuming that we don’t need local refinement in z.
Y 0/R grad−−−−→ Y 1 curl−−−−→ Y 2 div−−−−→ Y 3
The idea is to use 2D T-splines in the first two directions.
In the third direction we use univariate B-splines.
These are the spaces that form the sequence:Y 0 = Tp,p ⊗ Sp(Ξ),
Y 1 = (Tp−1,p ⊗ Sp(Ξ),Tp,p−1 ⊗ Sp(Ξ),Tp,p ⊗ Sp−1(Ξ)),
Y 2 = (Tp,p−1 ⊗ Sp−1(Ξ),Tp−1,p ⊗ Sp−1(Ξ
),Tp−1,p−1 ⊗ Sp(Ξ)),
Y 3 = Tp−1,p−1 ⊗ Sp−1(Ξ).
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 42 / 51

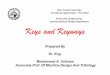
3D numerical results: three quarters of a cylinder
We discretize with the space Y 1 the model problem:
curl curl u + u = f,
with exact solution u = grad(r2/3 sin 2θ/3 sin(πz)).Refinement towards the reentrant edge, to catch the singularity.
T-splines of degree 3: better convergence than B-splines in terms ofdofs.
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 43 / 51

3D numerical results: three quarters of a cylinder
We discretize with the space Y 1 the model problem:
curl curl u + u = f,
with exact solution u = grad(r2/3 sin 2θ/3 sin(πz)).Refinement towards the reentrant edge, to catch the singularity.
103 10410−4
10−3
10−2
10−1
Degrees of freedom
Rel
ativ
e er
ror
T−splinesB−splinesy = C N −1.5
T-splines of degree 3: better convergence than B-splines in terms ofdofs.
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 43 / 51

3D numerical results: twisted waveguide
Propagation of the first TE mode in a twisted waveguide.
Discretized with T-splines with p = 3, and 7936 dofs.
With 6 elements in the z-direction, C2 or C0 tang. continuity.
Accurate transmission and reflection output.[Buffa, GS, Vázquez, submitted to JCP]
[http://geopdes.sourceforge.net]
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 44 / 51

Collaborator on recent researches I have presented
Lourenco Beirao da Veiga (University of Milan)Andrea Bressan (University of Pavia)Annalisa Buffa (IMATI-CNR)Massimiliano Martinelli (University of Pavia)Christoph Schwab (ETH)Rafael Vazquez (IMATI-CNR)
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 45 / 51

ReferencesOn IGA (Lecture 1-2):
J. A. Cottrell, T. J. R. Hughes, Y. Bazilevs, Isogeometric Analysis: towardintegration of CAD and FEA, John Wiley & Sons, 2009.L. Beirao da Veiga, D. Cho, G. Sangalli, Anisotropic NURBSapproximation in Isogeometric Analysis, Comput. Methods Appl. Mech.Engrg. 209-212 (2012) 1–11.J. A. Evans, Y. Bazilevs, I. Babuska, T. J. R. Hughes, N-widths, sup-infs,and optimality ratios for the k-version of the isogeometric FEM, Comput.Methods Appl. Mech. Engrg. 198 (21-26) (2009) 1726–1741.M. Scott, M. Borden, C. Verhoosel, T. Sederberg, T. J. R. Hughes,Isogeometric finite element data structures based on Bezier extraction ofT-splines, Internat. J. Numer. Methods Engrg. 88 (2) (2011) 126–156.C. de Falco, A. Reali, R. Vazquez, GeoPDEs: a research tool for IGA ofPDEs, Adv. Eng. Softw. 42 (12) (2011) 1020–1034.Buffa, Sangalli, Schwab, Exponential Convergence of the hp version ofIsogeometric analysis in 1D, Spectral and High Order Methods for PartialDifferential Equations - From the ICOSAHOM ’12 conference
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 46 / 51

References
On splines (Lecture 1-2):C. de Boor, A practical guide to splines, revised Edition, Vol. 27 ofApplied Mathematical Sciences, Springer-Verlag, New York, 2001.
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 47 / 51

ReferencesOn spline-based discrete differential forms (Lecture 2-3):
A. Buffa, J. Rivas, G. Sangalli, R. Vazquez, Isogeometric discretedifferential forms in three dimensions, SIAM J. Numer. Anal. 49(2) (2011) 818–844.A. Buffa, C. de Falco, G. Sangalli, Isogeometric Analysis: stableelements for the 2D Stokes equation, Internat. J. Numer. MethodsFluids 65 (11-12) (2011) 1407–1422.J. A. Evans, T. J. R. Hughes, Isogeometric divergence-conformingB-splines for the Darcy- Stokes-Brinkman equations., Math.Models Methods Appl. Sci. 23 (04) (2013) 671–741.J. A. Evans, T. J. R. Hughes, Isogeometric divergence-conformingB-splines for the Steady Navier-Stokes Equations, Math. ModelsMethods Appl. Sci. 23 (08) (2013) 1421–1478.J. A. Evans, T. J. R. Hughes, Isogeometric divergence-conformingB-splines for the Unsteady Navier-Stokes Equations, J. Comput.Phys. 241 (2013) 141–167.
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 48 / 51

ReferencesOn T-splines (Lecture 3)
M. Scott, T-splines as a design-through-analysis technology, Ph.D.thesis, The University of Texas at Austin (2011).Y. Bazilevs, V. Calo, J. A. Cottrell, J. A. Evans, T. J. R. Hughes, S.Lipton, M. Scott, T. Sederberg, Isogeometric analysis usingT-splines, Comput. Methods Appl. Mech. Engrg. 199 (5-8) (2010)229–263.X. Li, J. Zheng, T. Sederberg, T. Hughes, M. Scott, On linearindependence of T-spline blending functions, Comput. AidedGeom. Design 29 (1) (2012) 63–76.L. Beirao da Veiga, A. Buffa, G. Sangalli, R. Vazquez,Analysis-suitable T-splines of arbitrary degree: Definition, linearindependence and approximation properties, Math. ModelsMethods Appl. Sci. (2013), DOI:10.1142/S0218202513500231.M.R. Dörfel, B. Jüttler, and B. Simeon. Adaptive isogeometricanalysis by local h-refinement with T-splines. Comput. MethodsAppl. Mech. Engrg., 199(5-8):264–275, 2010.Y. Zhang, W. Wang, T. J. R. Hughes, Solid T-spline constructionfrom boundary repre- sentations for genus-zero geometry,Comput. Methods Appl. Mech. Engrg. 249/252 (2012) 185–197.
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 49 / 51

References
On other non-tensor-product spline spaces (Lecture 3)
T. Dokken, T. Lyche, K. F. Pettersen, Polynomial splines overlocally refined box-partitions, Comput. Aided Geom. Design 30 (3)(2013) 331–356.A.-V. Vuong, C. Giannelli, B. Jüttler, B. Simeon, A hierarchicalapproach to adaptive local refinement in isogeometric analysis,Comput. Methods Appl. Mech. Engrg. 200 (49-52) (2011)3554–3567.H. Speleers, C. Manni, F. Pelosi, M. L. Sampoli, Isogeometricanalysis with Powell-Sabin splines for advection-diffusion-reactionproblems, Comput. Methods Appl. Mech. Engrg. 221/222 (2012)132–148.
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 50 / 51

Conclusion
we have defined arbitrary-degree AS T-splines,we have proved linear independence of AS T-splines, partition ofunity property and fundamental approximation results,the theory is based on the characterization of AS T-splines as DCT-splines.
we have defined T-splines based differential forms, based onarbitrary-degree AS T-meshes:
the Bézier mesh is the same for all the spaces in the diagram.tested spurious free approximation of Maxwell eigenproblem.better convergence than B-splines in terms of d.o.f.
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 51 / 51

Conclusion
we have defined arbitrary-degree AS T-splines,we have proved linear independence of AS T-splines, partition ofunity property and fundamental approximation results,the theory is based on the characterization of AS T-splines as DCT-splines.
we have defined T-splines based differential forms, based onarbitrary-degree AS T-meshes:
the Bézier mesh is the same for all the spaces in the diagram.tested spurious free approximation of Maxwell eigenproblem.better convergence than B-splines in terms of d.o.f.
*** Thank you for your attention ***
G. Sangalli (Univ. of Pavia) Lecture 3 June 2013 51 / 51