Embed Size (px)
Citation preview
Computer Graphics
CMU 15-462/15-662, Fall 2016
Lecture 4:
Transforms
CMU 15-462/662, Fall 2016
Brief recap from last class
▪ How to draw a triangle
- Why focus on triangles, and not quads,
pentagons, etc?
- What was specific to triangles in what we
discussed last class?
CMU 15-462/662, Fall 2016
What in the world is this?
CMU 15-462/662, Fall 2016
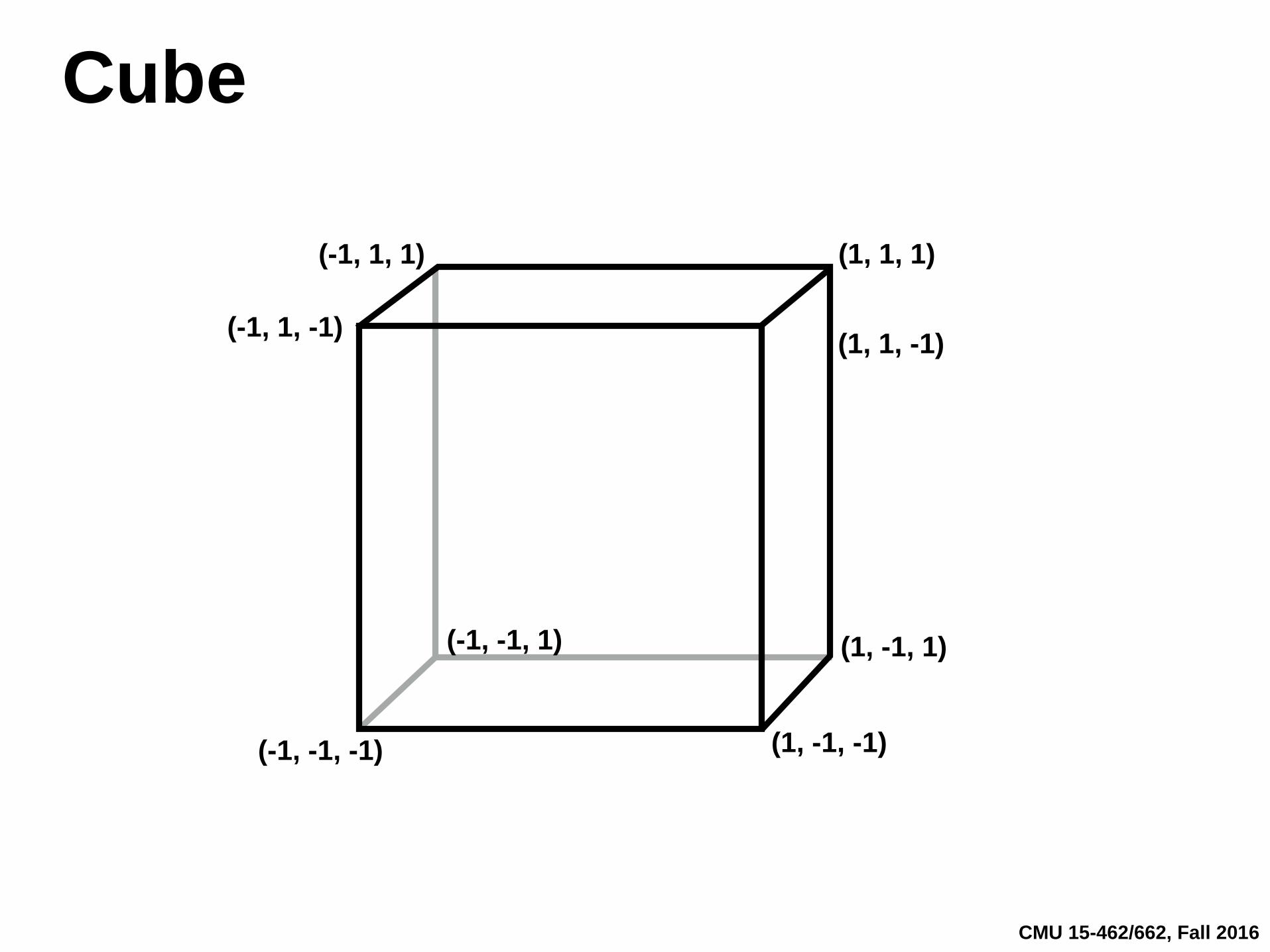
Cube
(-1, -1, -1) (1, -1, -1)
(1, -1, 1)(-1, -1, 1)
(1, 1, -1)
(1, 1, 1)
(-1, 1, -1)
(-1, 1, 1)
CMU 15-462/662, Fall 2016
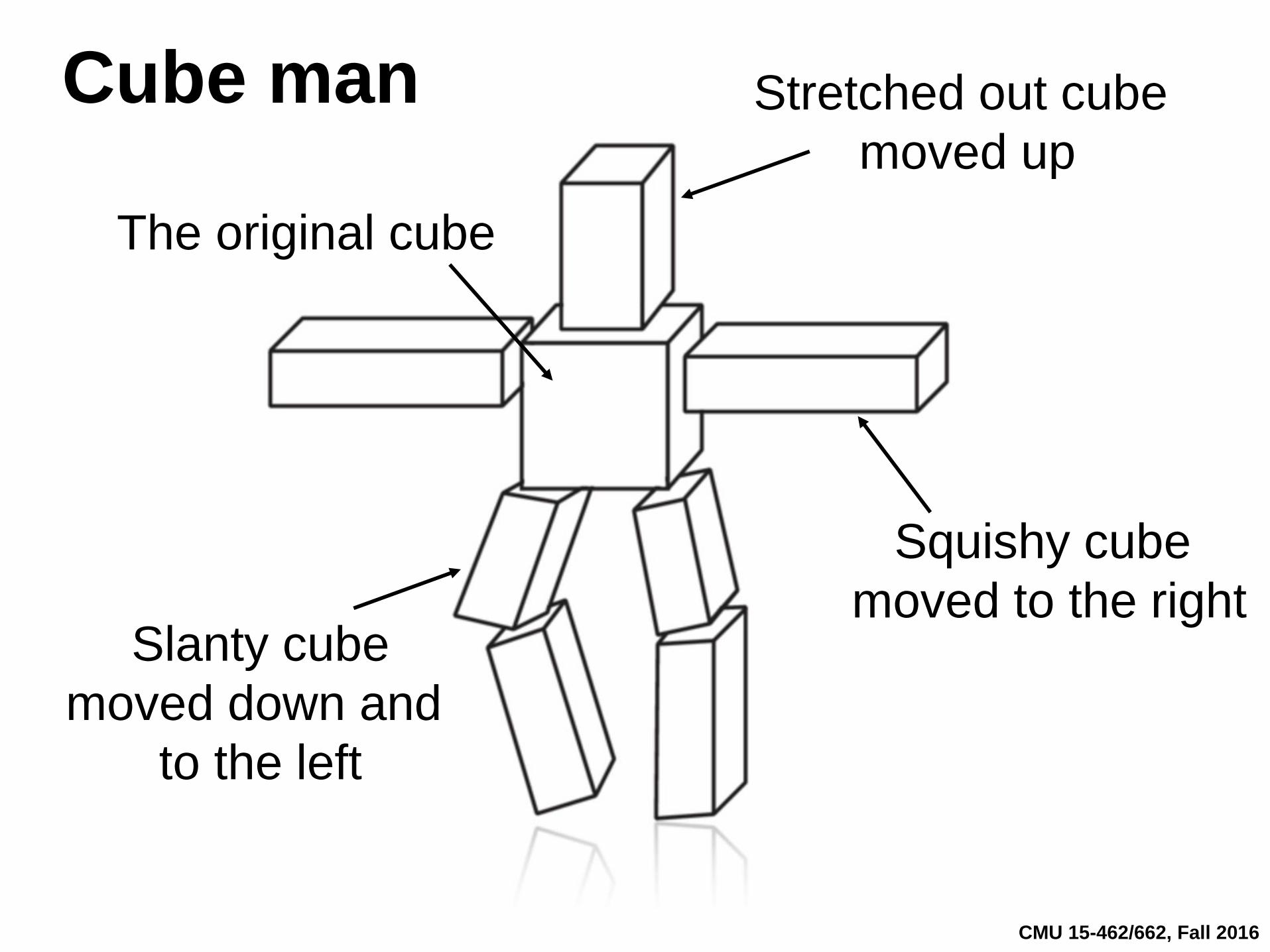
Cube man Stretched out cube
moved up
Squishy cube
moved to the rightSlanty cube
moved down and
to the left
The original cube
CMU 15-462/662, Fall 2016
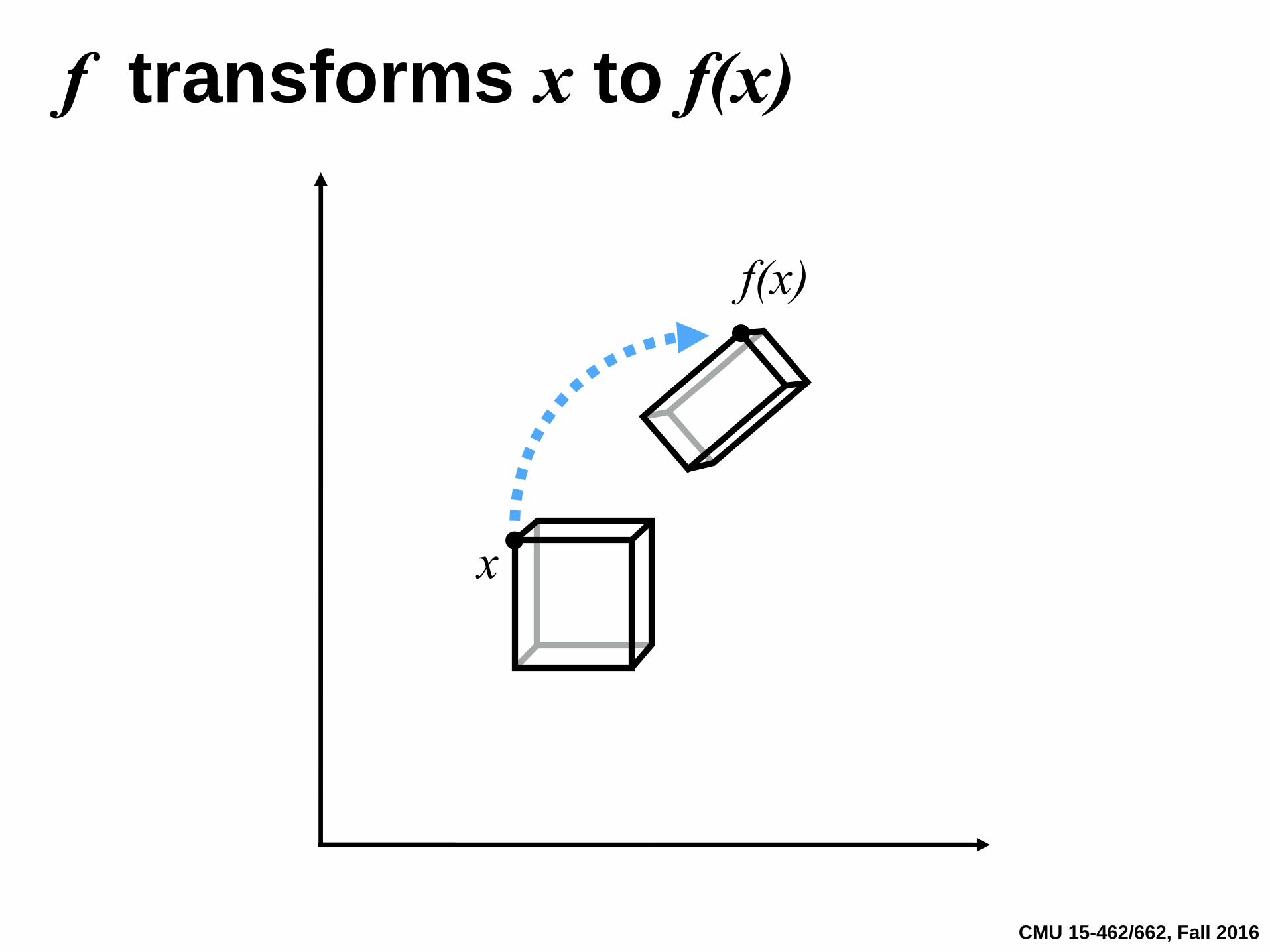
f transforms x to f(x)
x
f(x)
CMU 15-462/662, Fall 2016
And what is our favorite type of
transformation?
CMU 15-462/662, Fall 2016
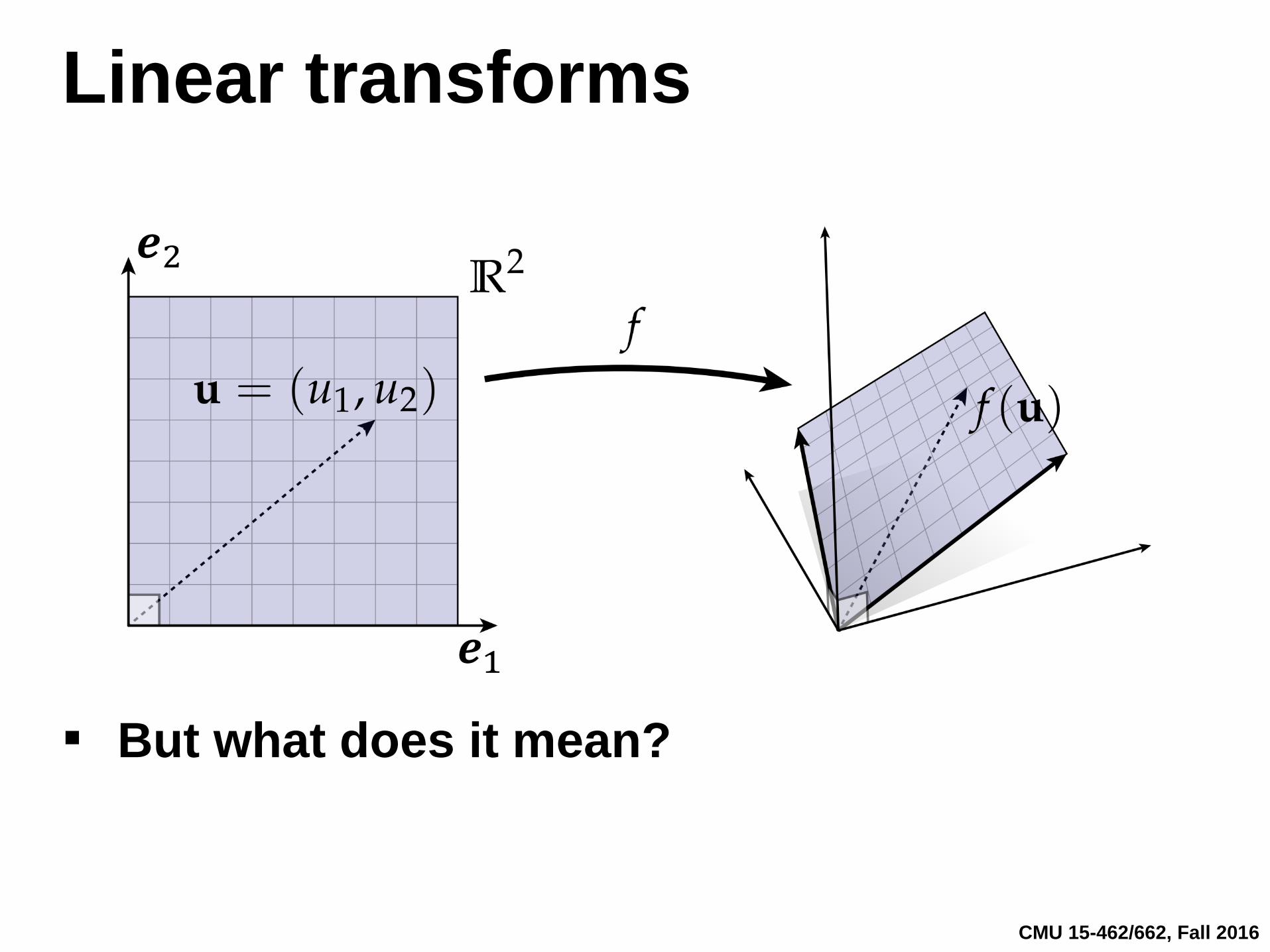
Linear transforms
𝒆1
𝒆2
▪ But what does it mean?
CMU 15-462/662, Fall 2016
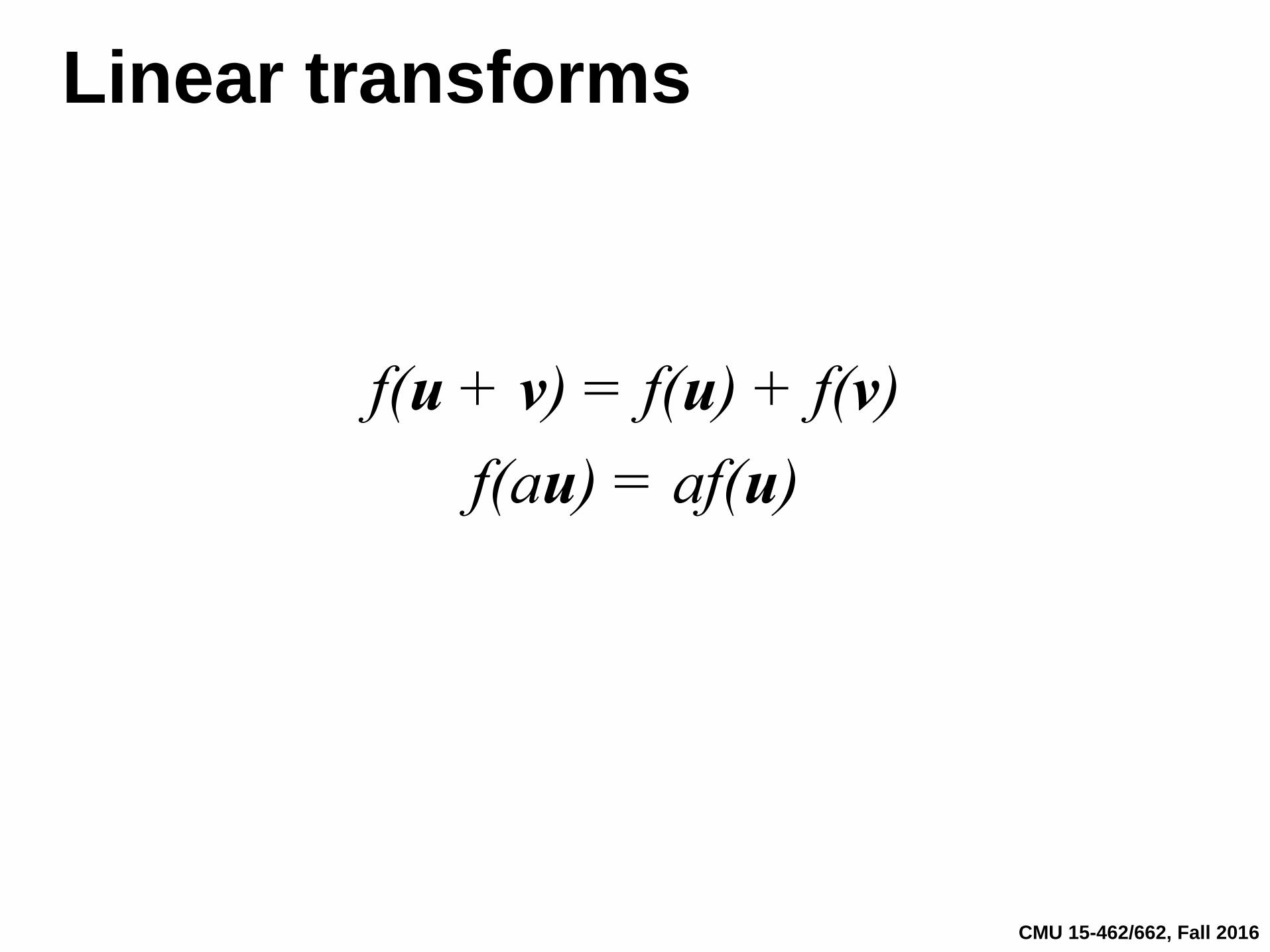
Linear transforms
f(u + v) = f(u) + f(v)
f(au) = af(u)

CMU 15-462/662, Fall 2016
Linear transforms
If a map can be expressed as
f(u) =σ𝑖=1𝑚 𝑢𝑖𝒂𝑖
with fixed vectors 𝒂𝑖, then it is linear

CMU 15-462/662, Fall 2016
Linear transforms
▪ Do you know…
- what 𝑢1 and 𝑢2 are?
- what 𝒂1 and 𝒂2 are?
𝒆1
𝒆2
CMU 15-462/662, Fall 2016
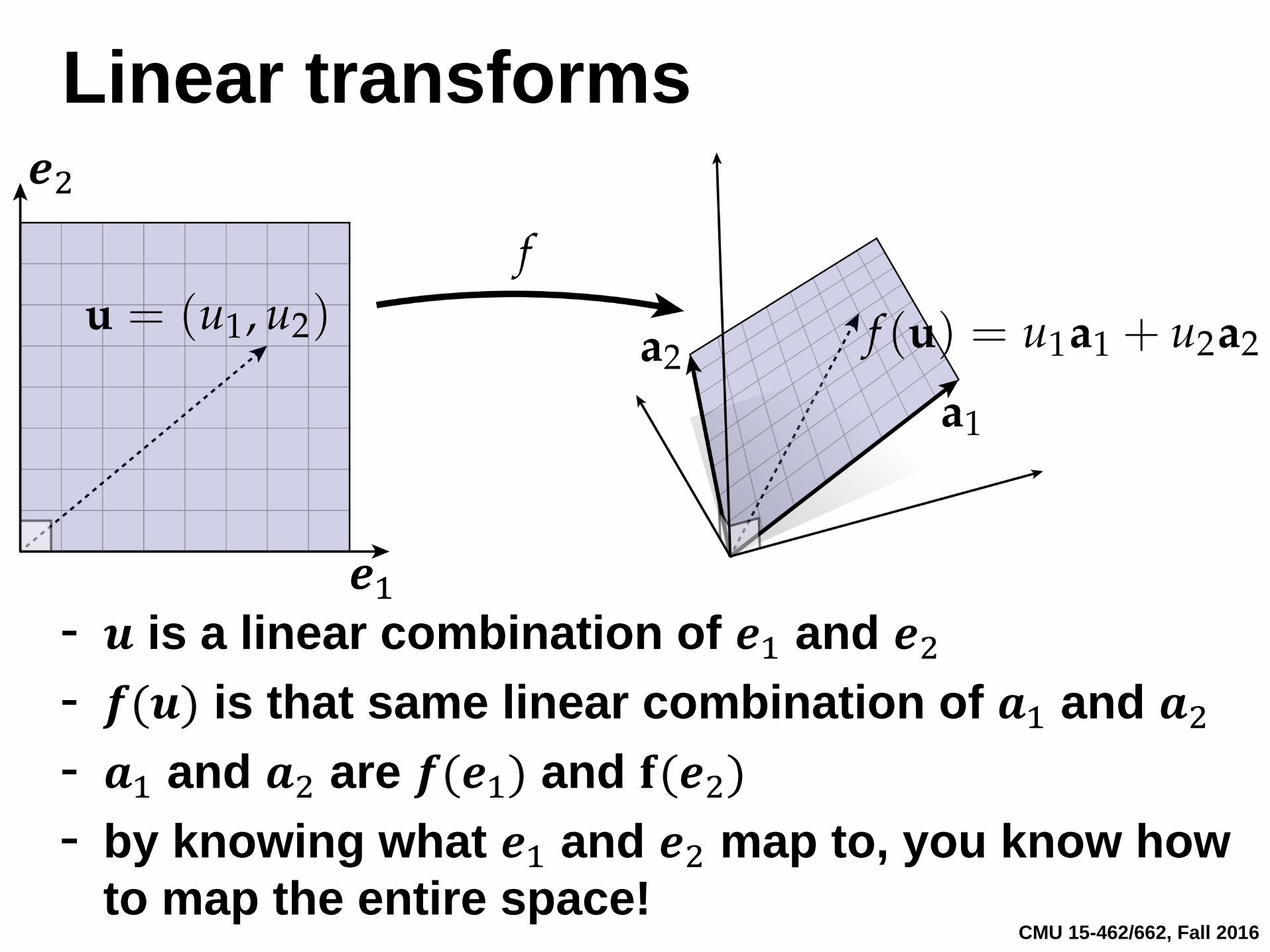
Linear transforms
- 𝒖 is a linear combination of 𝒆1 and 𝒆2
- 𝒇(𝒖) is that same linear combination of 𝒂1 and 𝒂2
- 𝒂1 and 𝒂2 are 𝒇(𝒆1) and 𝐟(𝒆2)
- by knowing what 𝒆1 and 𝒆2 map to, you know how
to map the entire space!
𝒆1
𝒆2
CMU 15-462/662, Fall 2016
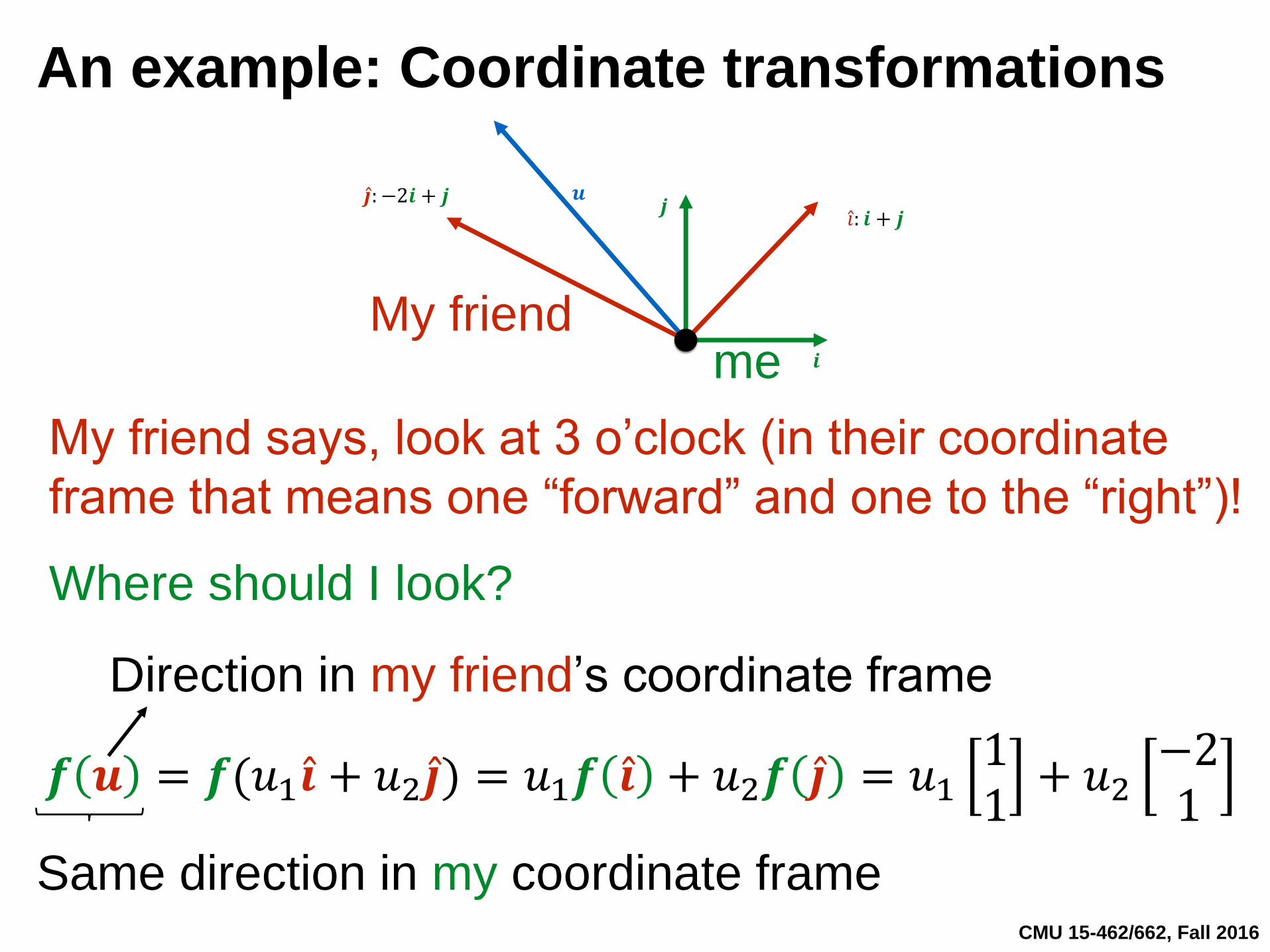
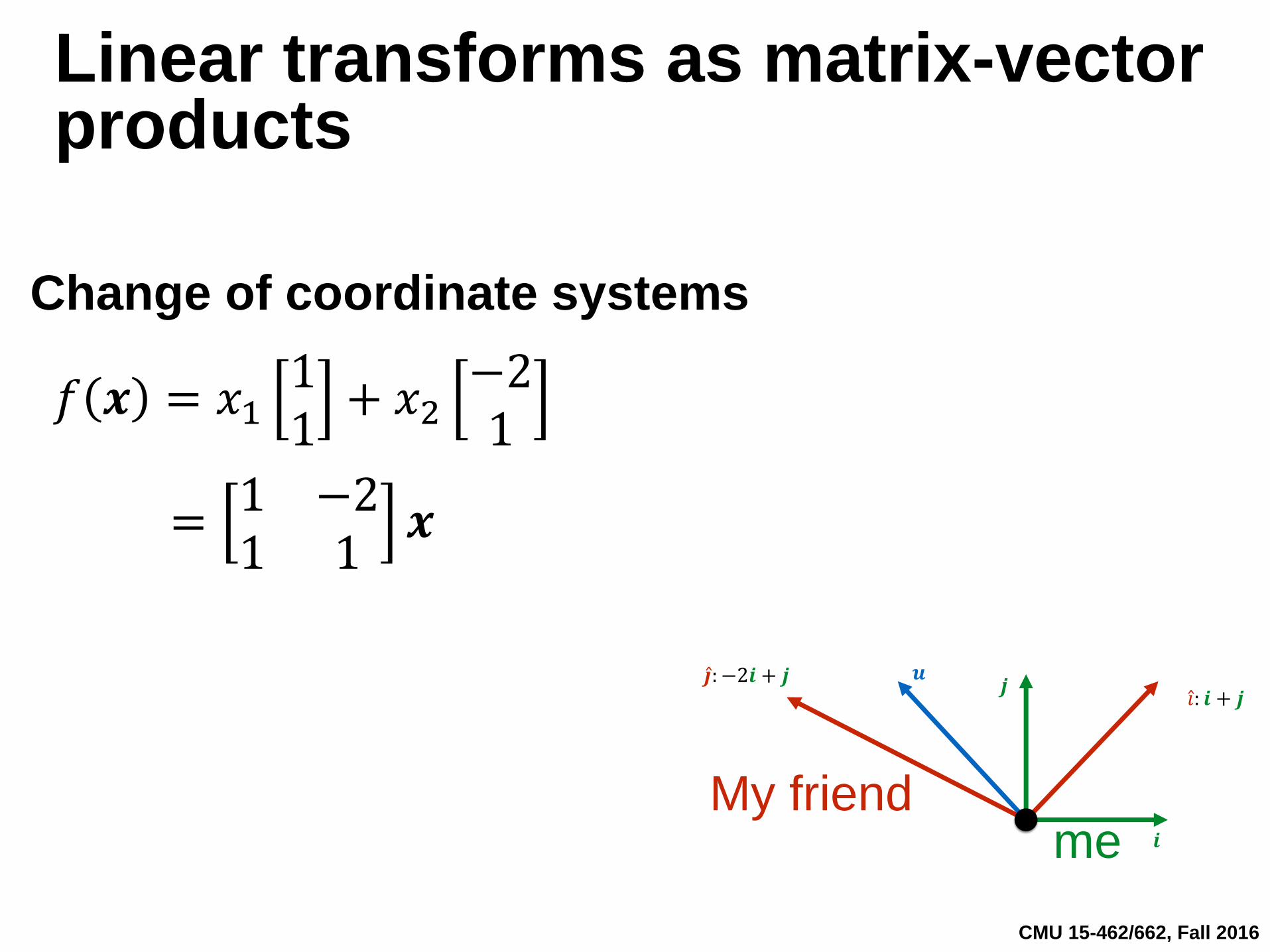
An example: Coordinate transformations
𝒊
𝒋Ƹ𝑖: 𝒊 + 𝒋
Ƹ𝒋: −2𝒊 + 𝒋
meMy friend
My friend says, look at 3 o’clock (in their coordinate
frame that means one “forward” and one to the “right”)!
Where should I look?
𝒇 𝒖 = 𝒇(𝑢1 Ƹ𝒊 + 𝑢2 Ƹ𝒋) = 𝑢1𝒇 Ƹ𝒊 + 𝑢2𝒇 Ƹ𝒋 = 𝑢111
+ 𝑢2−21
Direction in my friend’s coordinate frame
Same direction in my coordinate frame
𝒖
CMU 15-462/662, Fall 2016
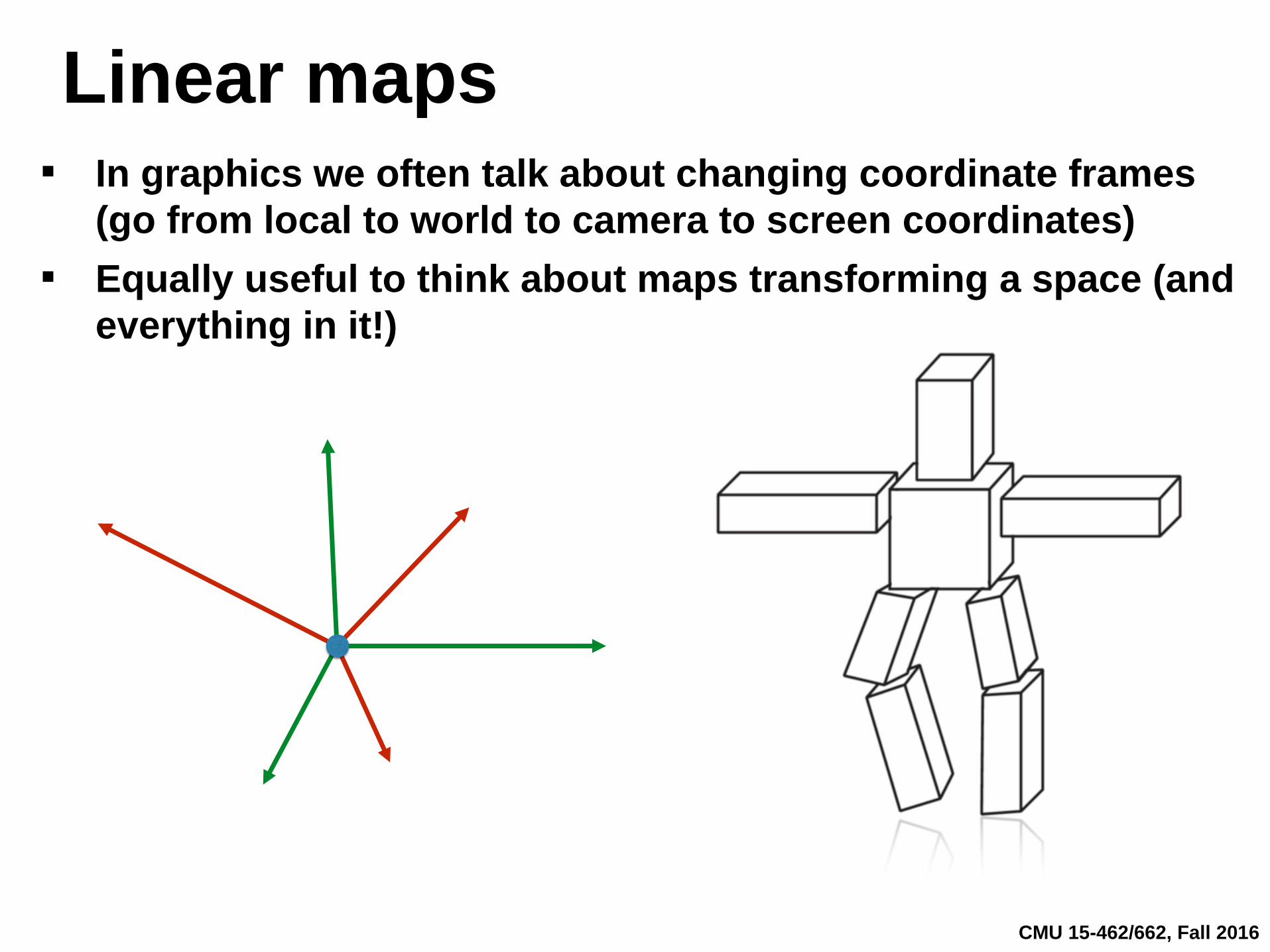
Linear maps▪ In graphics we often talk about changing coordinate frames
(go from local to world to camera to screen coordinates)
▪ Equally useful to think about maps transforming a space (and
everything in it!)

CMU 15-462/662, Fall 2016
Let’s look at some transforms
that are important in graphics…
How do you formally tell a computer that this
cube should be squished and slanty?
CMU 15-462/662, Fall 2016
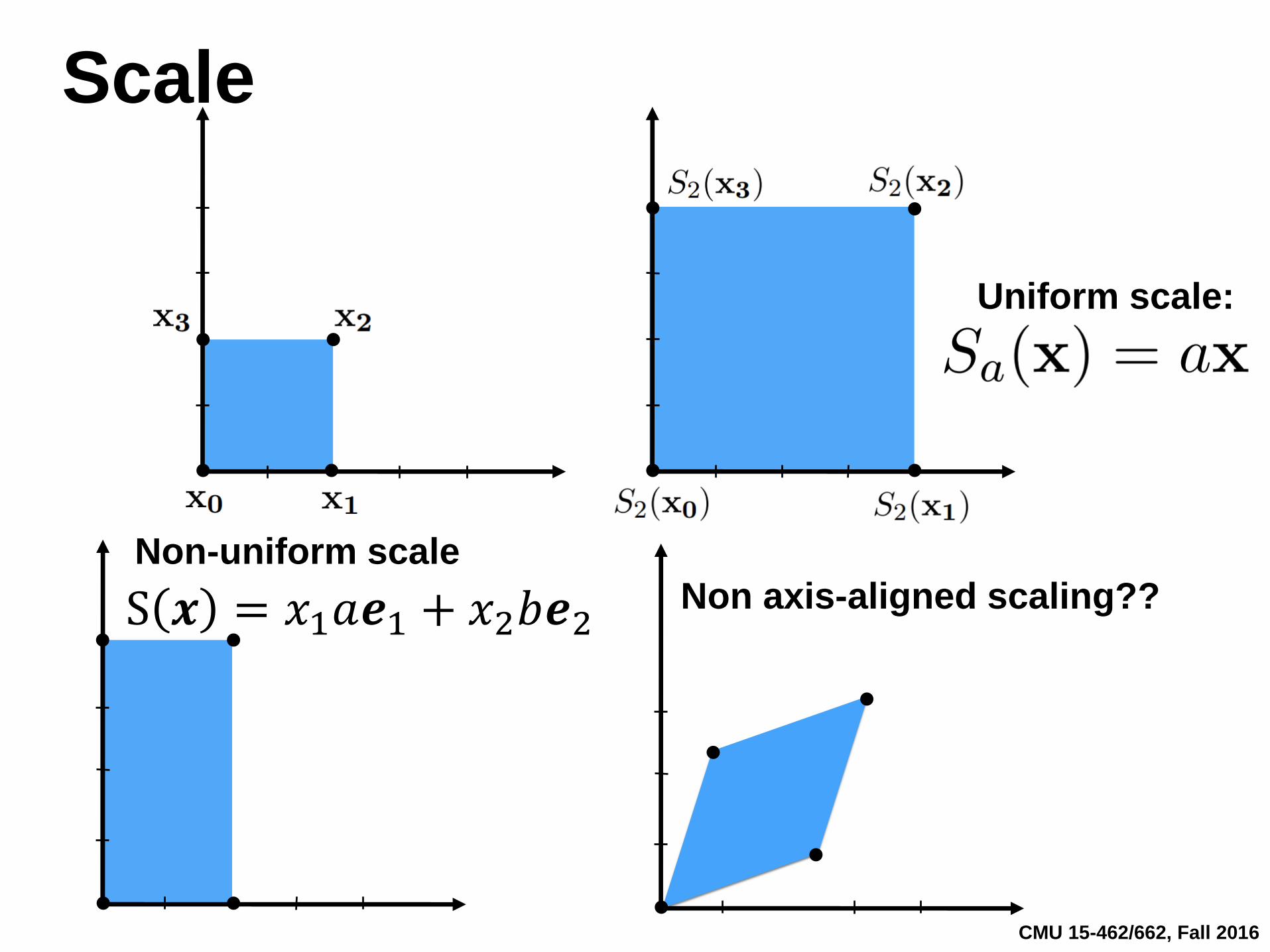
Scale
Uniform scale:
Non-uniform scale
Non axis-aligned scaling??S 𝒙 = 𝑥1𝑎𝒆1 + 𝑥2𝑏𝒆2
CMU 15-462/662, Fall 2016
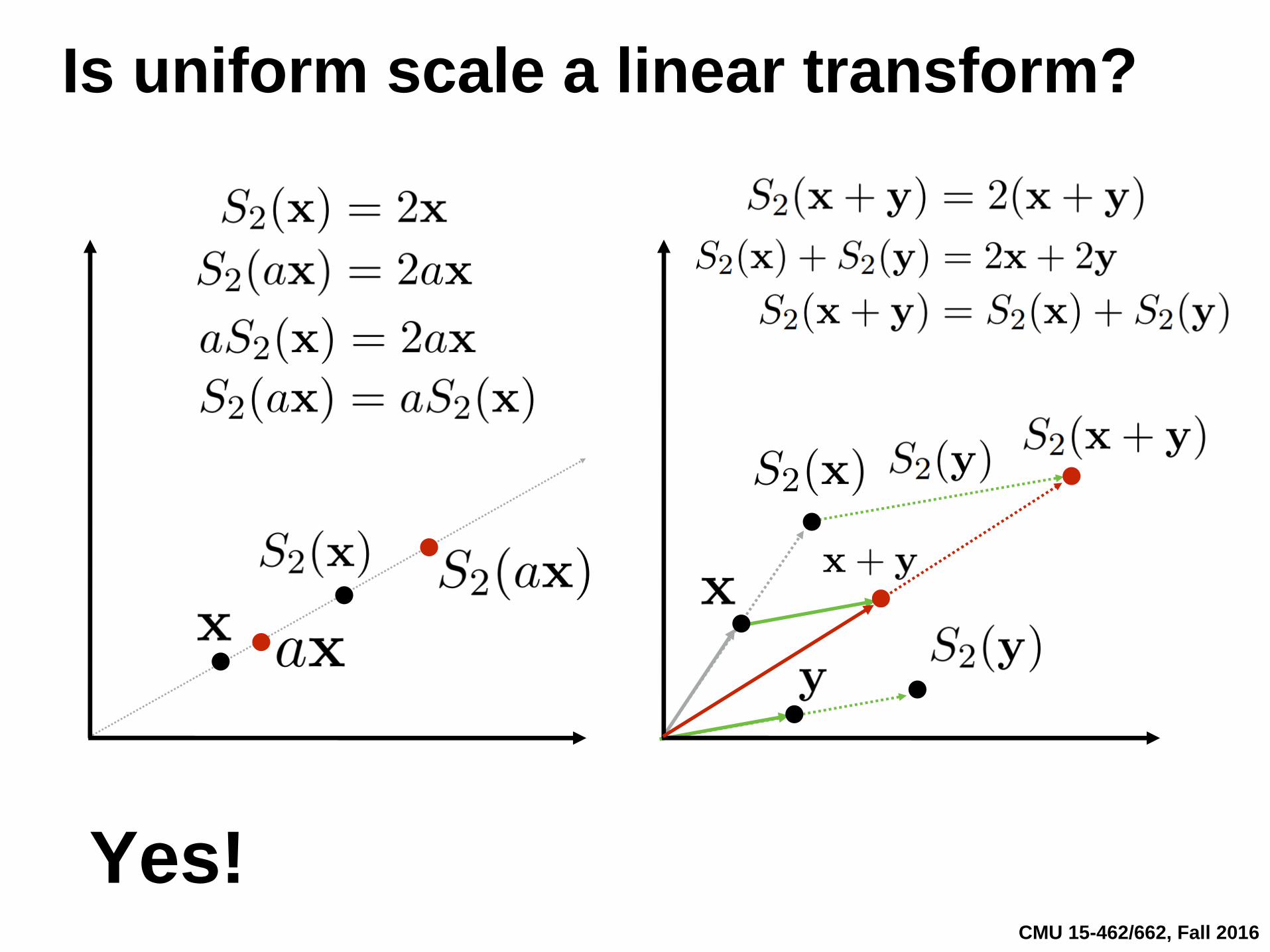
Is uniform scale a linear transform?
Yes!

CMU 15-462/662, Fall 2016
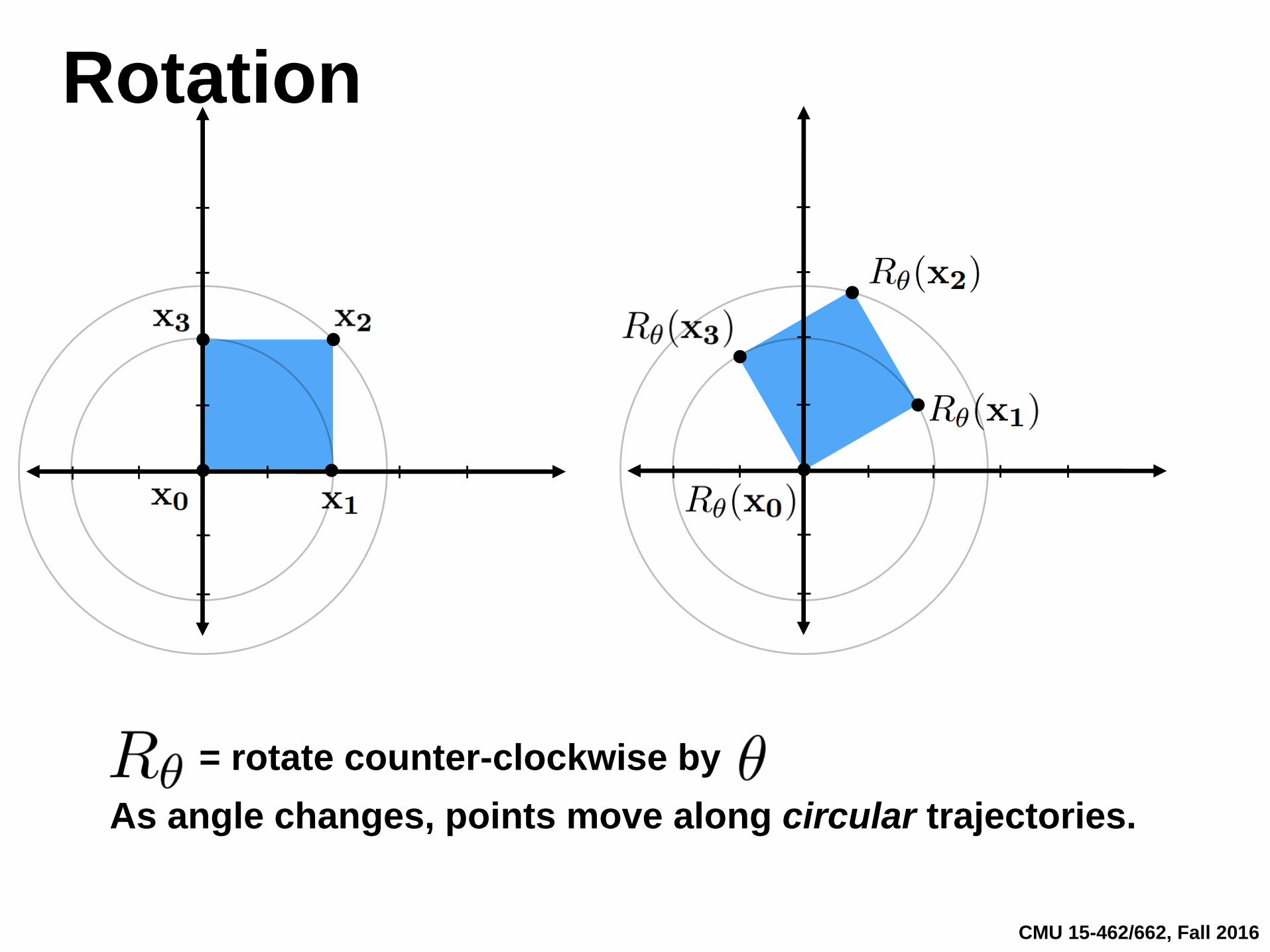
Rotation
= rotate counter-clockwise by
CMU 15-462/662, Fall 2016
Rotation
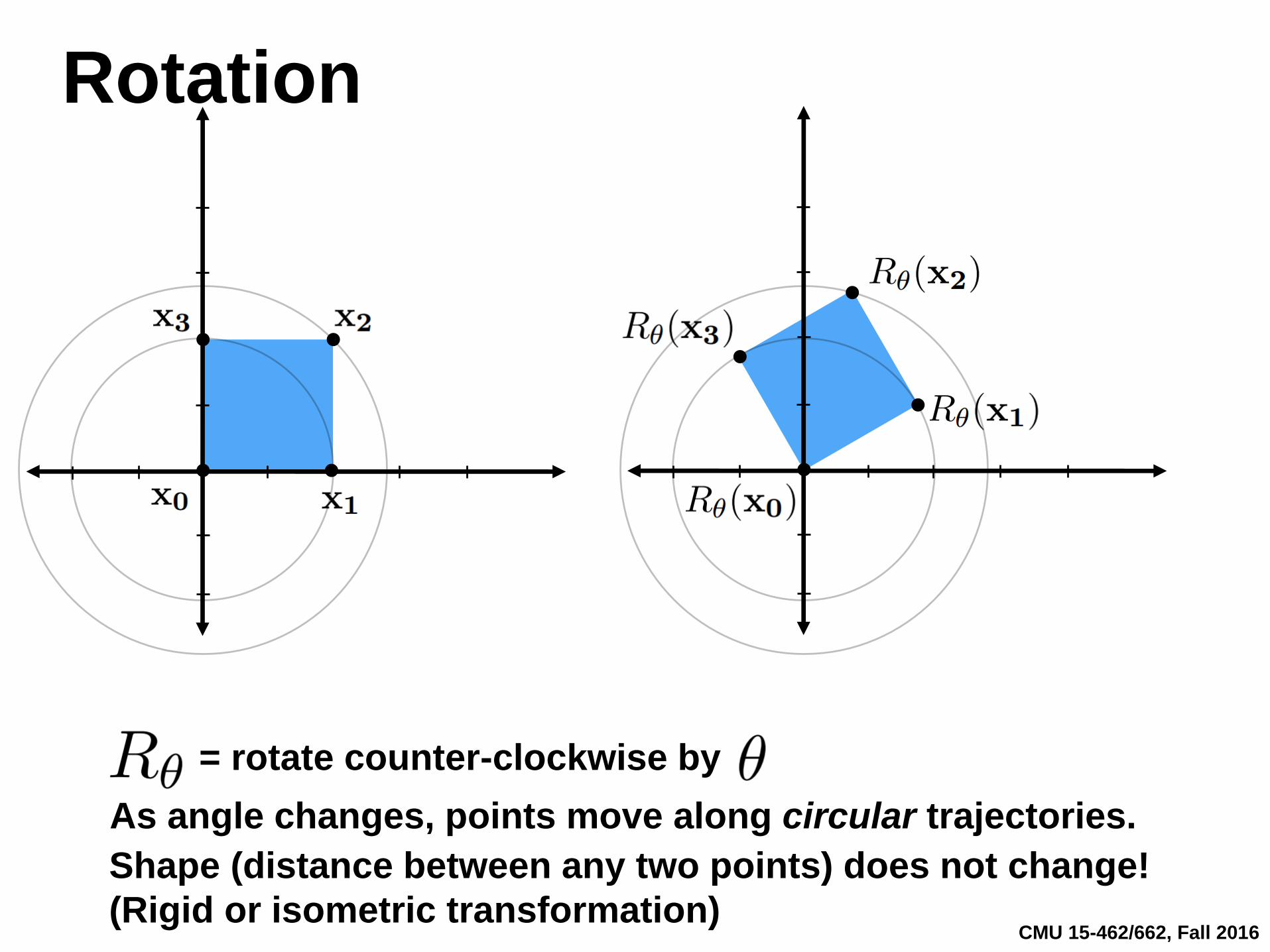
= rotate counter-clockwise by
As angle changes, points move along circular trajectories.
CMU 15-462/662, Fall 2016
Rotation
= rotate counter-clockwise by
As angle changes, points move along circular trajectories.
Shape (distance between any two points) does not change!
(Rigid or isometric transformation)
CMU 15-462/662, Fall 2016
Rotation
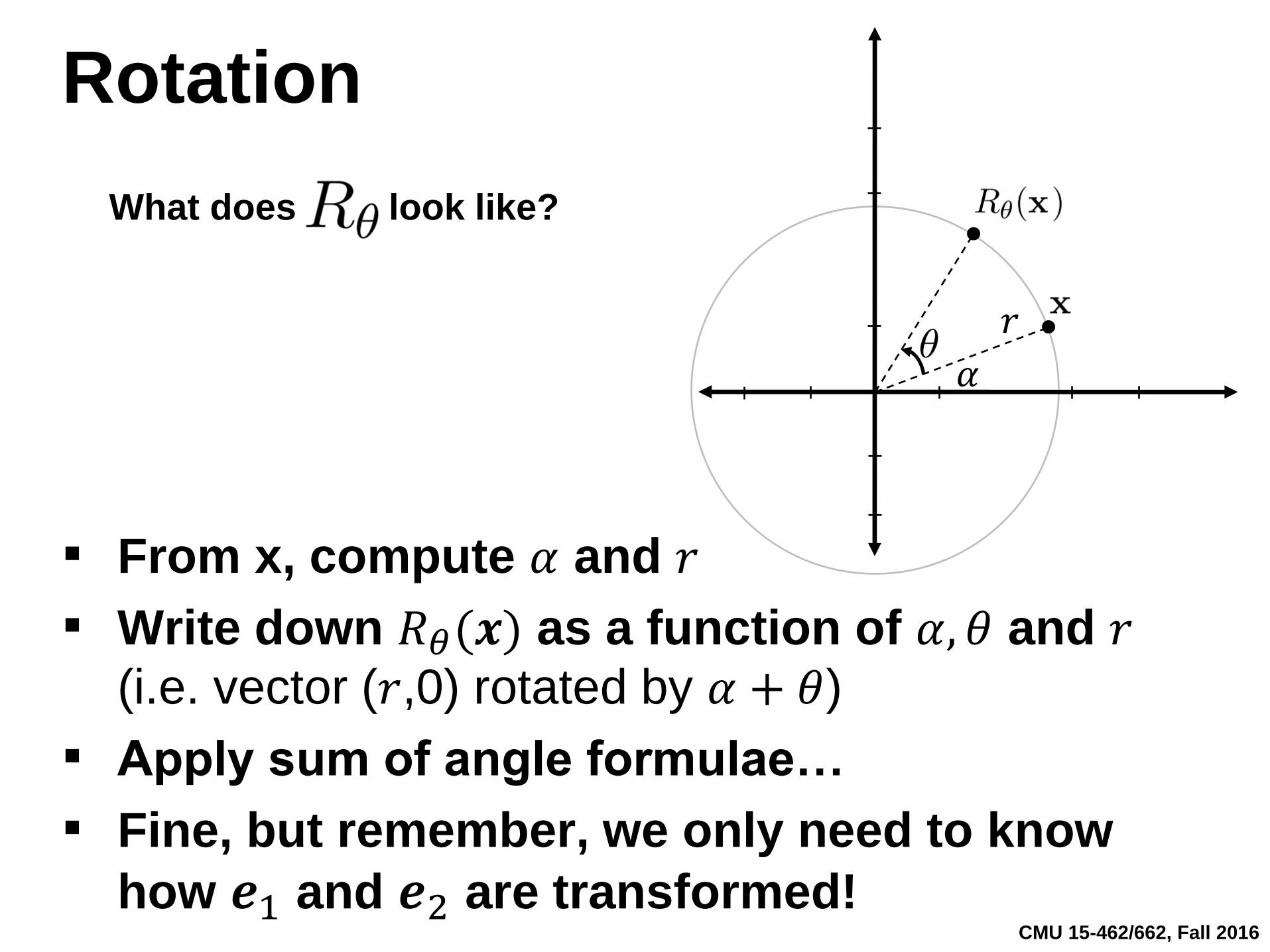
What does look like?
▪ From x, compute 𝛼 and 𝑟
▪ Write down 𝑅𝜃(𝒙) as a function of 𝛼, 𝜃 and 𝑟(i.e. vector (𝑟,0) rotated by 𝛼 + 𝜃)
▪ Apply sum of angle formulae…
▪ Fine, but remember, we only need to know
how 𝒆1 and 𝒆2 are transformed!
𝛼
𝑟

CMU 15-462/662, Fall 2016
RotationSo, what happens to vectors (1, 0) and (0, 1) after rotation by θ?
Answer:
-𝑠𝑖𝑛 θ
𝑐𝑜𝑠 θ
𝑐𝑜𝑠 θ𝑠𝑖𝑛 θ
𝑅θ 𝒆1 = 𝑐𝑜𝑠 𝜃, 𝑠𝑖𝑛 𝜃 = 𝒂1𝑅θ 𝒆2 = −𝑠𝑖𝑛 𝜃, 𝑐𝑜𝑠 𝜃 = 𝒂2
So:
𝑅θ 𝒙 = 𝑥1𝒂1 + 𝑥2𝒂2
CMU 15-462/662, Fall 2016
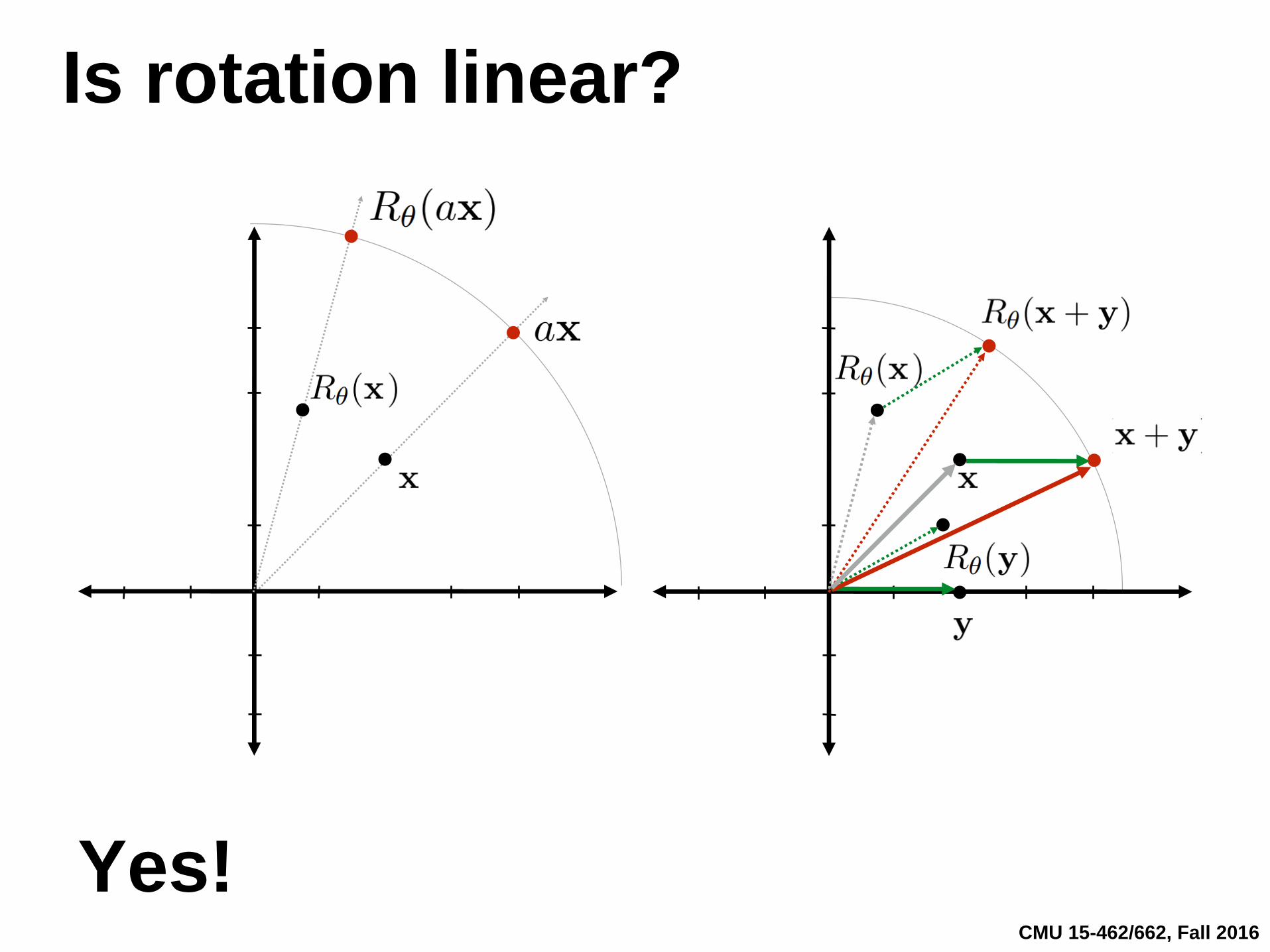
Is rotation linear?
Yes!

CMU 15-462/662, Fall 2016
Rotation
▪ Note: all points are rotated about the origin
- By the way, what are we actually transforming here?
▪ What if we want to rotate about another point?
CMU 15-462/662, Fall 2016
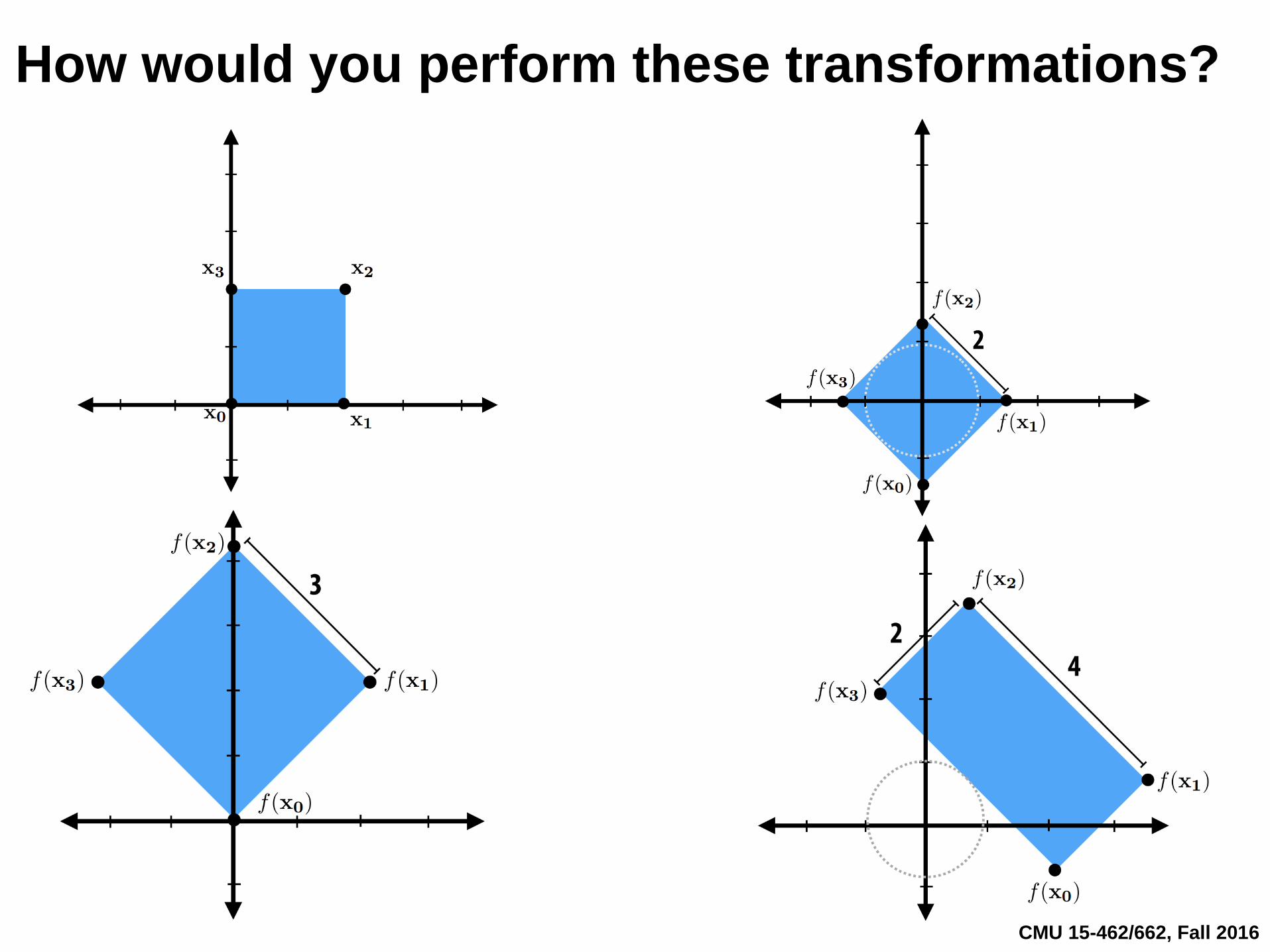
Reflection
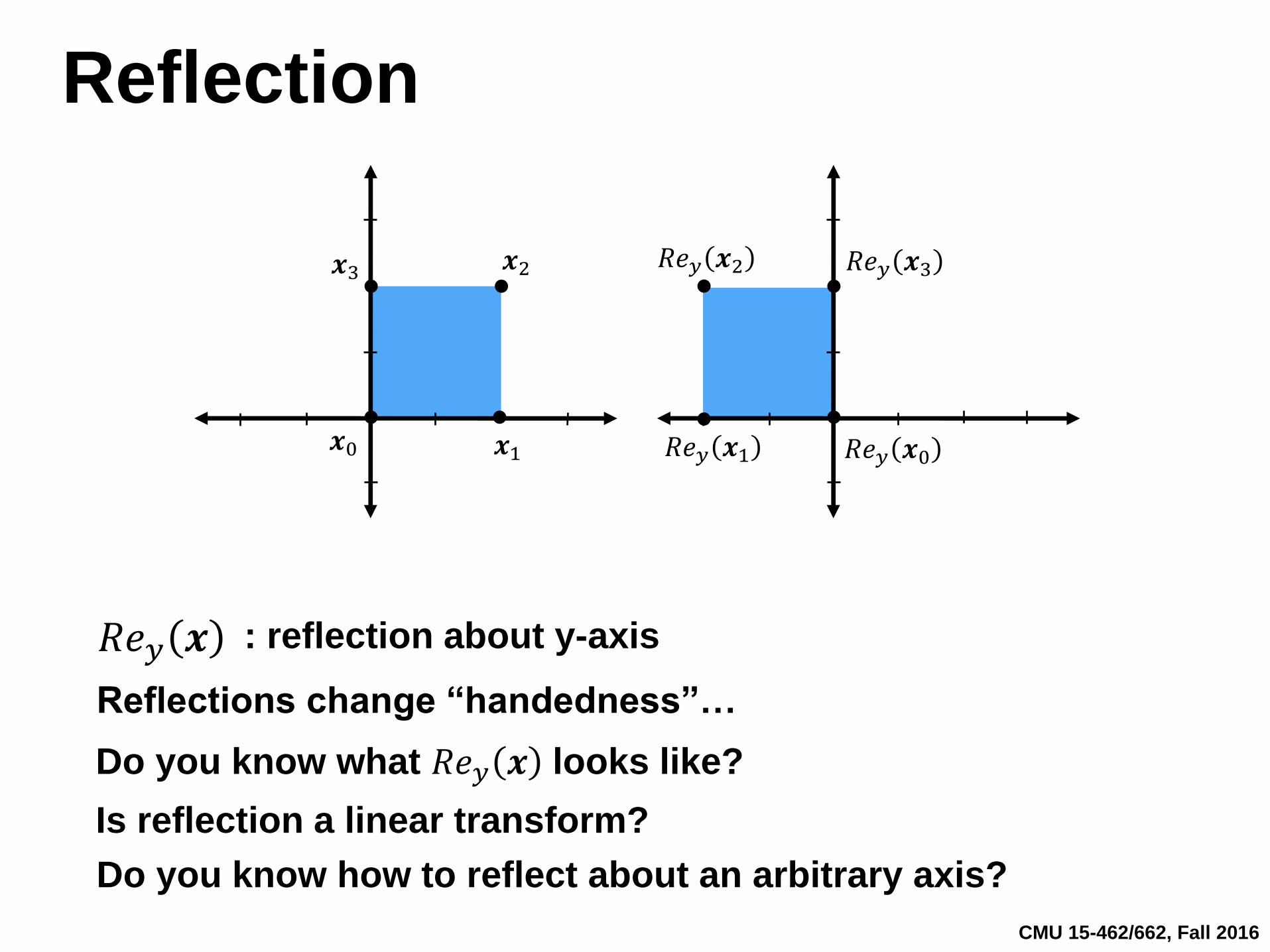
: reflection about y-axis
Reflections change “handedness”…
𝑅𝑒𝑦 𝒙
𝑅𝑒𝑦 𝒙0𝑅𝑒𝑦 𝒙1
𝑅𝑒𝑦 𝒙2 𝑅𝑒𝑦 𝒙3
Do you know what 𝑅𝑒𝑦 𝒙 looks like?
Do you know how to reflect about an arbitrary axis?
𝒙0 𝒙1
𝒙3 𝒙2
Is reflection a linear transform?
CMU 15-462/662, Fall 2016
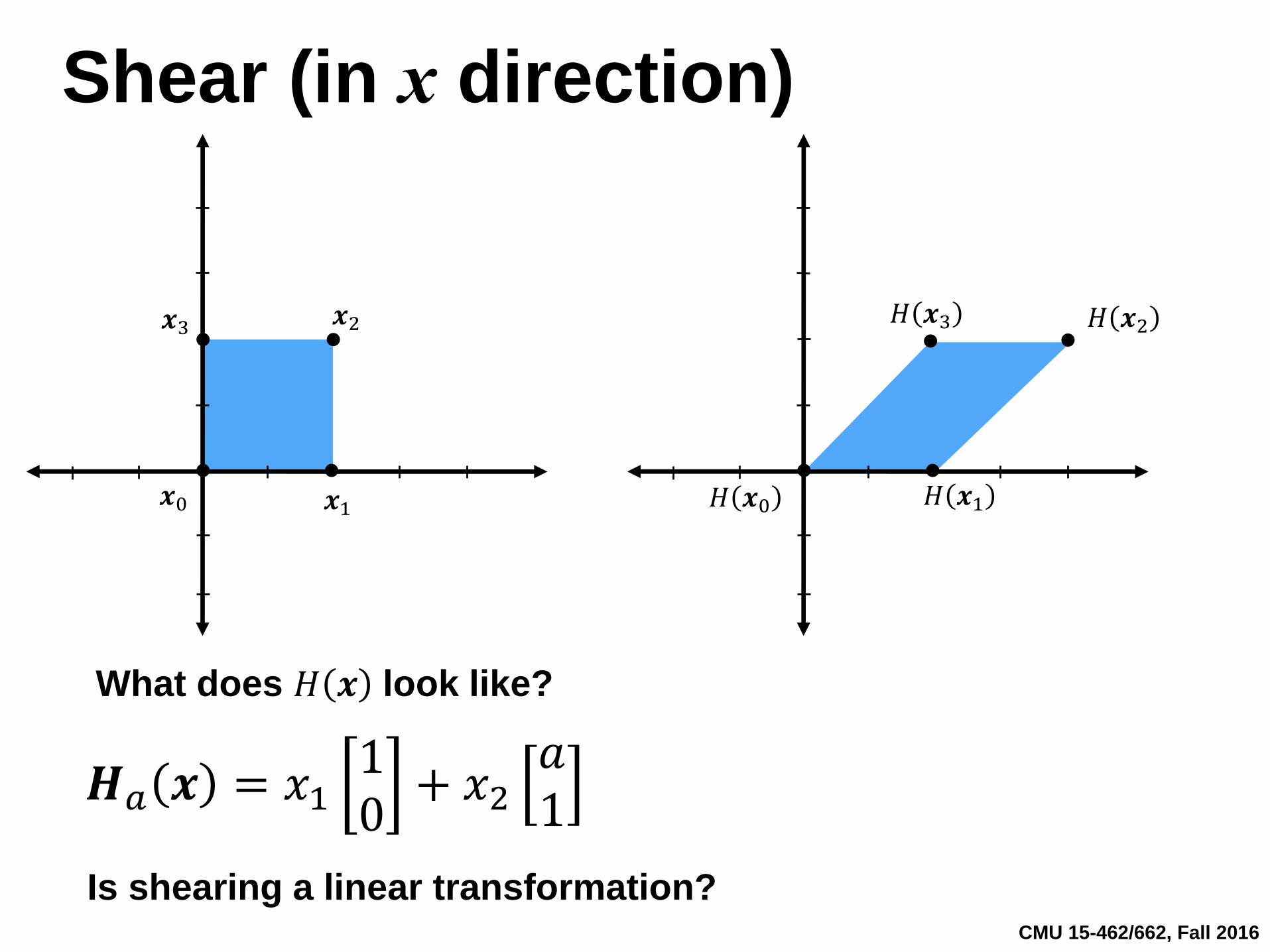
Shear (in x direction)
𝐻 𝒙0 𝐻 𝒙1
𝐻 𝒙2𝐻 𝒙3
𝒙0 𝒙1
𝒙3 𝒙2
What does 𝐻 𝒙 look like?
Is shearing a linear transformation?
𝑯𝑎 𝒙 = 𝑥110
+ 𝑥2𝑎1
CMU 15-462/662, Fall 2016
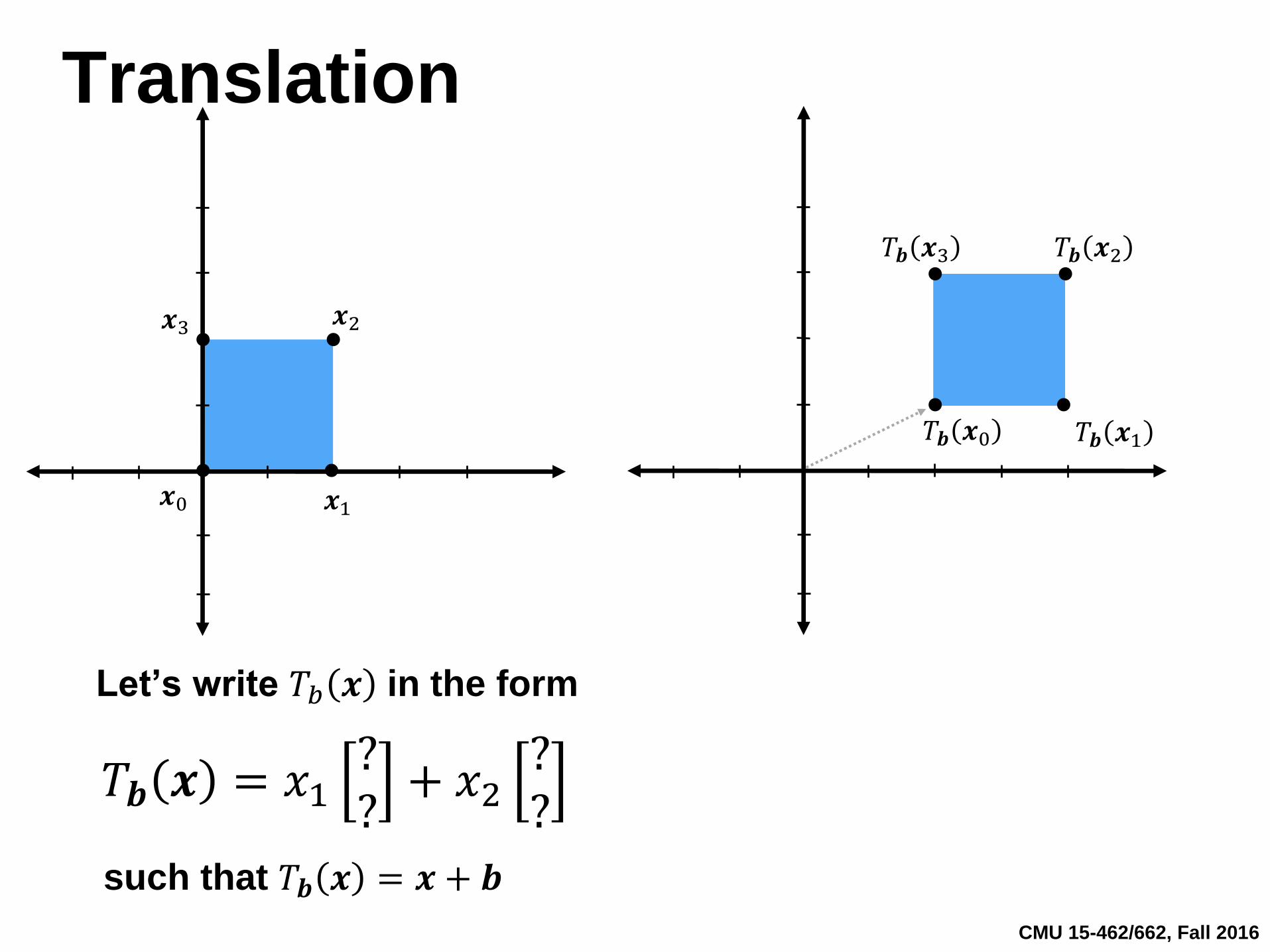
Translation
𝑇𝒃 𝒙0
𝒙0 𝒙1
𝒙3 𝒙2
𝑇𝒃 𝒙1
𝑇𝒃 𝒙2𝑇𝒃 𝒙3
Let’s write 𝑇𝑏 𝒙 in the form
𝑇𝒃 𝒙 = 𝑥1??+ 𝑥2
??
such that 𝑇𝒃 𝒙 = 𝒙 + 𝒃
CMU 15-462/662, Fall 2016
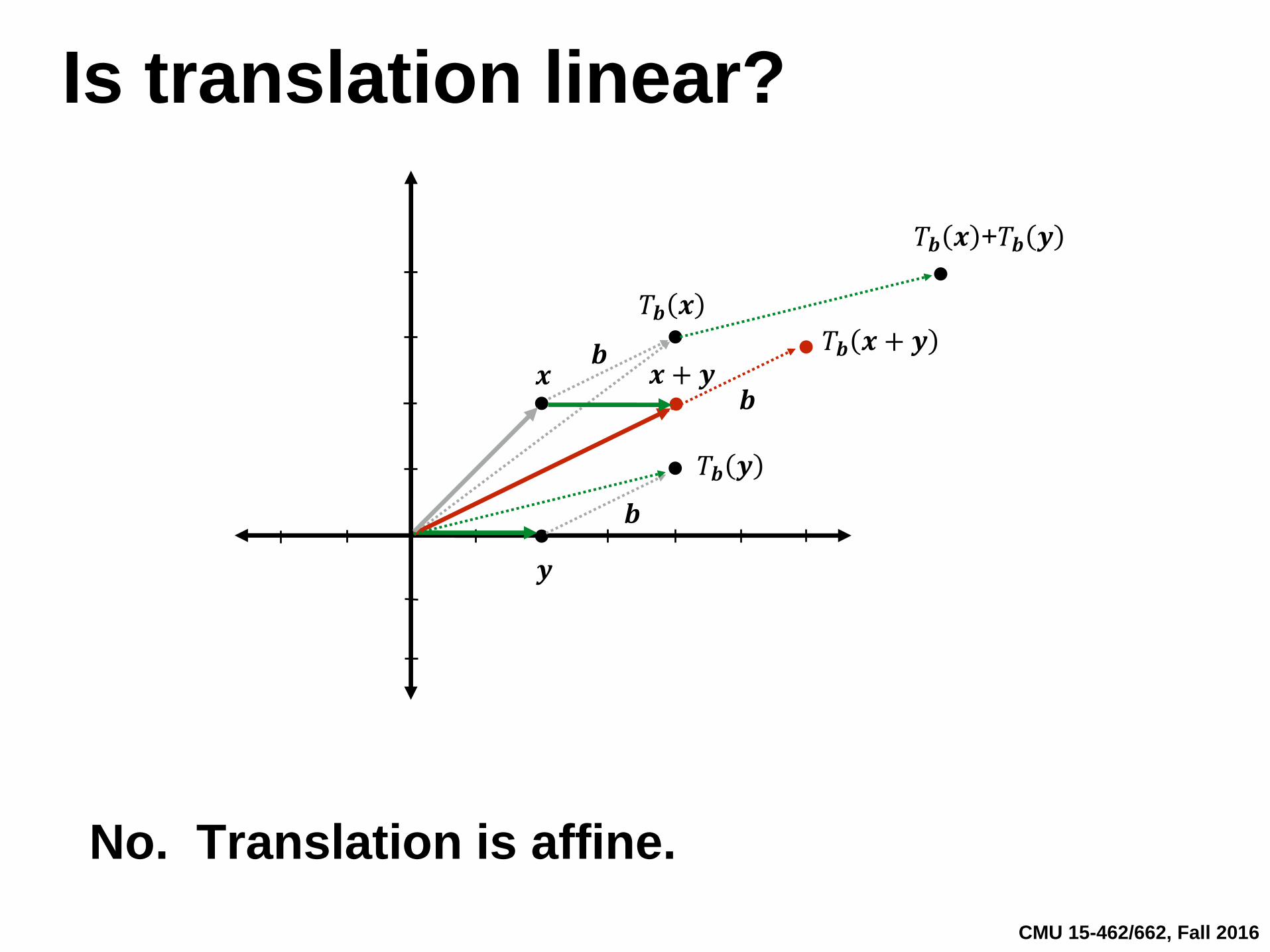
Is translation linear?
No. Translation is affine.
𝒙 𝒙 + 𝒚𝒃
𝑇𝒃 𝒙
𝑇𝒃 𝒙 +𝑇𝒃 𝒚
𝒚
𝑇𝒃 𝒚
𝑇𝒃 𝒙 + 𝒚
𝒃
𝒃
CMU 15-462/662, Fall 2016
When at first you don’t succeed…
▪ We’ll turn affine transformations into linear
ones via
▪ But first, let’s use matrix notation to
represent linear transforms
Homogeneous coordinates
(aka projective coordinates)
CMU 15-462/662, Fall 2016
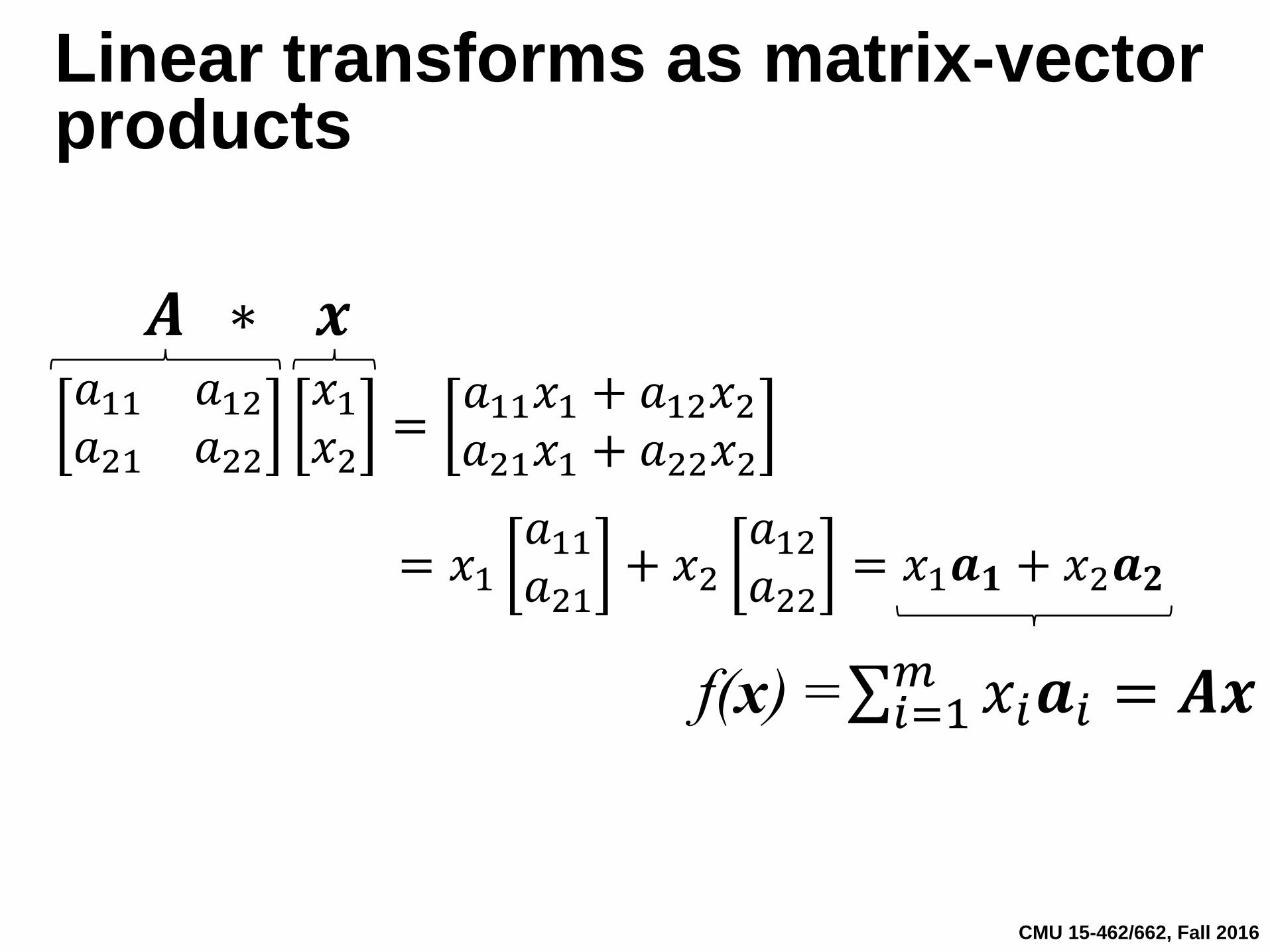
Linear transforms as matrix-vector products
𝑎11 𝑎12𝑎21 𝑎22
𝑥1𝑥2
=𝑎11𝑥1 + 𝑎12𝑥2𝑎21𝑥1 + 𝑎22𝑥2
= 𝑥1𝑎11𝑎21
+ 𝑥2𝑎12𝑎22
= 𝑥1𝒂𝟏 + 𝑥2𝒂𝟐
f(x) =σ𝑖=1𝑚 𝑥𝑖𝒂𝑖 = 𝑨𝒙
𝑨 ∗ 𝒙
CMU 15-462/662, Fall 2016
Linear transforms as matrix-vector products
Change of coordinate systems
𝑓 𝒙 = 𝑥111
+ 𝑥2−21
=1 −21 1
𝒙
𝒊
𝒋Ƹ𝑖: 𝒊 + 𝒋
Ƹ𝒋: −2𝒊 + 𝒋
meMy friend
𝒖

CMU 15-462/662, Fall 2016
Linear transforms as matrix-vector products
Non-uniform scale
S 𝒙 = 𝑥1𝑎𝒆1 + 𝑥2𝑏𝒆2
=𝑎 00 𝑏
𝒙
CMU 15-462/662, Fall 2016
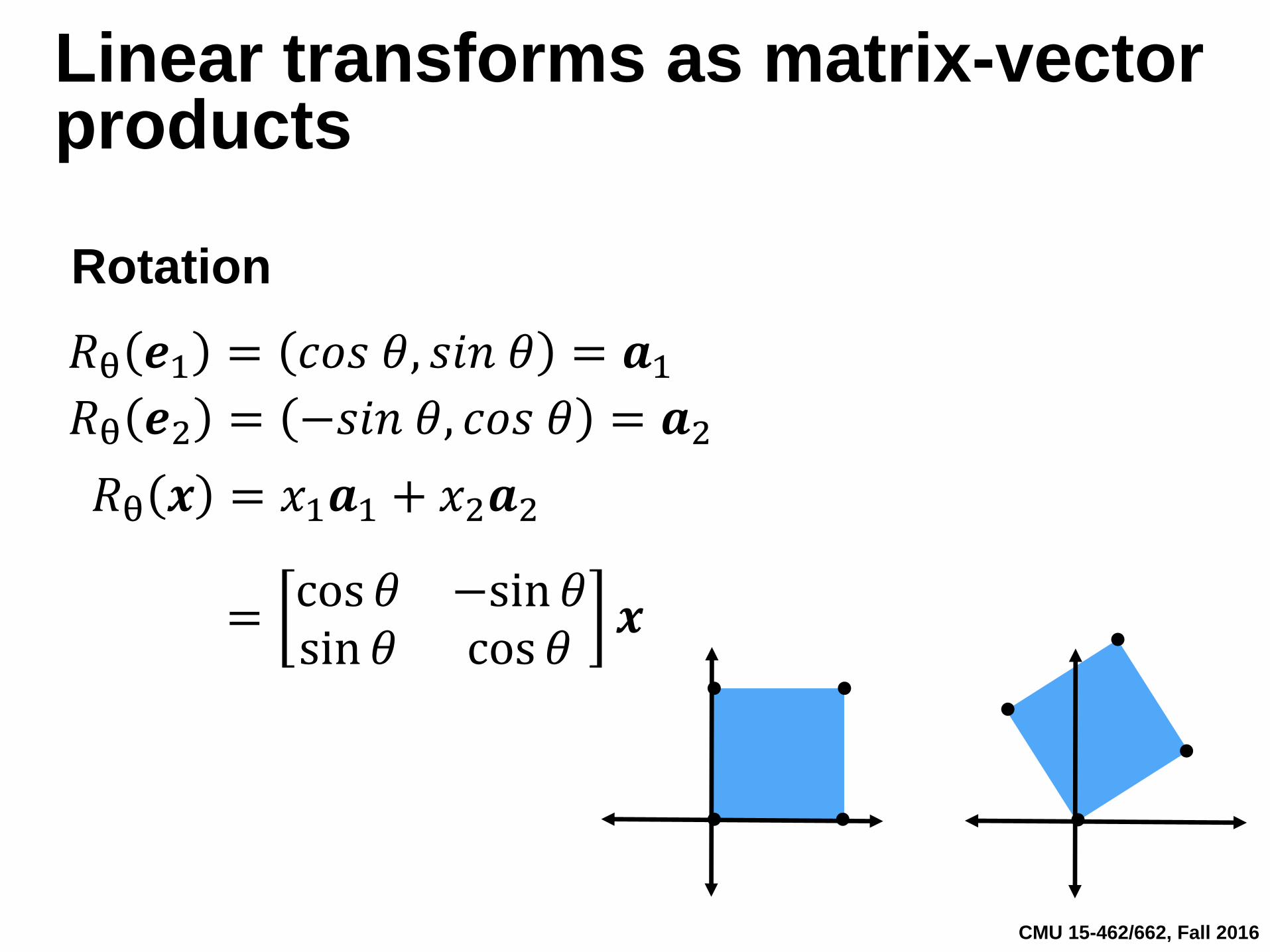
Linear transforms as matrix-vector products
Rotation
𝑅θ 𝒆1 = 𝑐𝑜𝑠 𝜃, 𝑠𝑖𝑛 𝜃 = 𝒂1𝑅θ 𝒆2 = −𝑠𝑖𝑛 𝜃, 𝑐𝑜𝑠 𝜃 = 𝒂2
𝑅θ 𝒙 = 𝑥1𝒂1 + 𝑥2𝒂2
=cos 𝜃 −sin 𝜃sin 𝜃 cos 𝜃
𝒙
CMU 15-462/662, Fall 2016
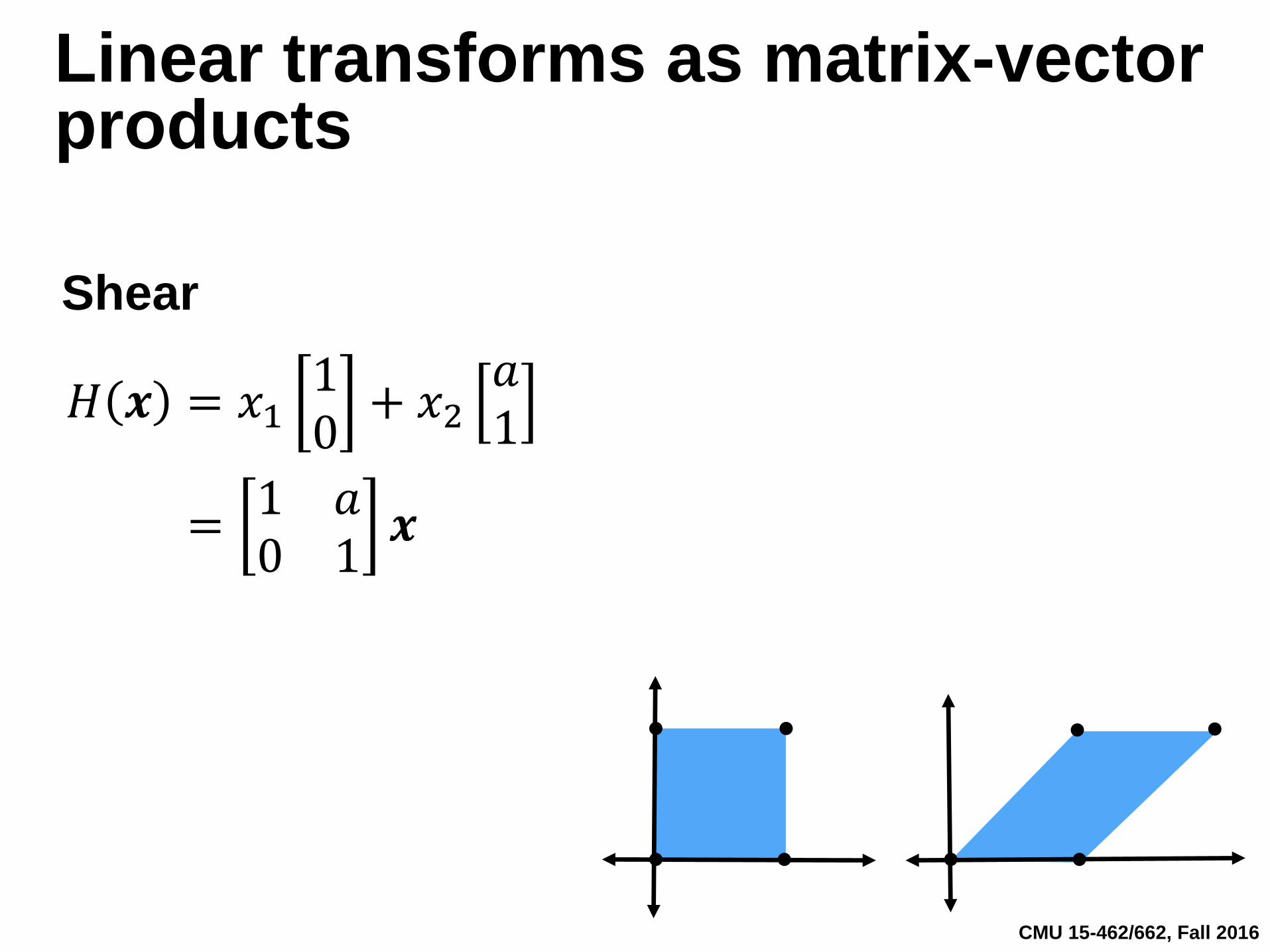
Linear transforms as matrix-vector products
Shear
𝐻 𝒙 = 𝑥110
+ 𝑥2𝑎1
=1 𝑎0 1
𝒙
CMU 15-462/662, Fall 2016
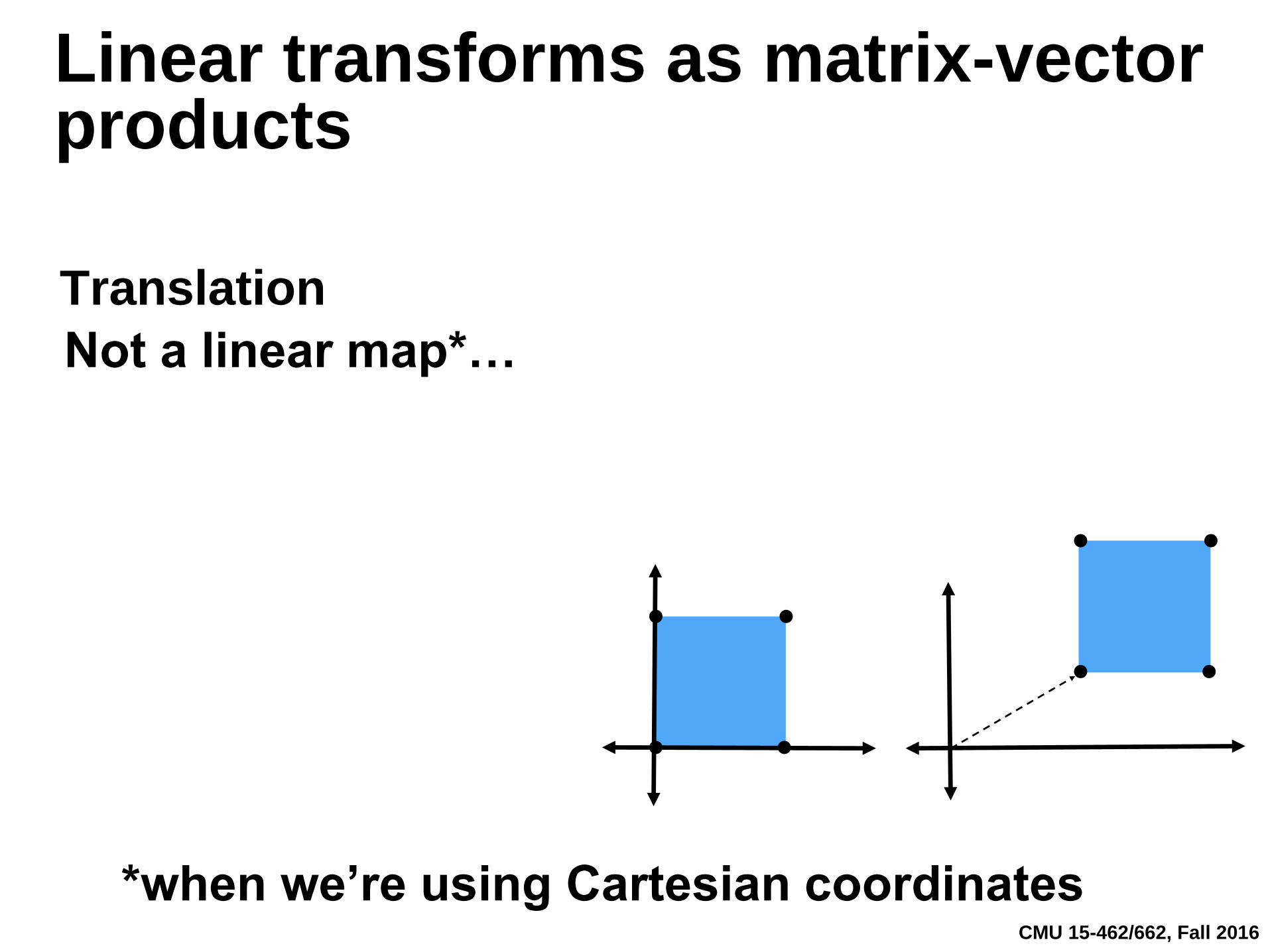
Linear transforms as matrix-vector products
Translation
Not a linear map*…
*when we’re using Cartesian coordinates

CMU 15-462/662, Fall 2016
Key idea: lift 2D points to a 3D space
So the point is represented as the 3-vector:
And 2D transforms are represented by 3x3 matrices
For example: 2D rotation in homogeneous coordinates:
2D homogeneous coordinates (2D-H)
Q: how do the transforms we’ve seen so far affect the last coordinate?
(𝑥1, 𝑥2)𝑥1𝑥21
cos 𝜃 −sin 𝜃 0sin 𝜃 cos 𝜃 00 0 1
𝑥1𝑥21

CMU 15-462/662, Fall 2016
Translation in 2D-H coords
Translation expressed as 3x3 matrix multiplication:
In homogeneous coordinates, translation is a linear transformation!
𝑻 𝒙 = 𝒙 + 𝒃 =1 0 𝑏10 1 𝑏20 0 1
𝑥1𝑥21
=𝑥1 + 𝑏1𝑥2 +𝑏2
1

CMU 15-462/662, Fall 2016
Translation in 2D-H coords
What is this magic?
Translation in 2D homogeneous coordinates is equivalent to
shearing along x and y axes – a linear operation.
1 0 𝑏10 1 𝑏20 0 1
𝑥1𝑥2𝑥3
=
𝑥1 + 𝑏1𝑥2 +𝑏2𝑥3
But why is 𝑥3 set to 1? Could it not be 3.4182 instead?

CMU 15-462/662, Fall 2016
Homogeneous coordinates
x
y
(𝑥1, 𝑥2)
w
w = 1
(𝑥1, 𝑥2, 1)
𝑤𝑥1, 𝑤𝑥2, 𝑤 , ∀𝑤 > 0
- Homogenous coordinates are scale invariant
- 𝒙 and 𝑤𝒙 correspond to the same 2D point (divide by 𝑤 to convert 2D-H back to 2D)
- 2D-H points with 𝑤 = 0correspond to 2D vectors (technically, points at infinity)
- In homogenous coordinates, points and vectors are distinguishable from each other!

CMU 15-462/662, Fall 2016
Homogeneous coordinates:
points vs. vectors
x
y
(𝑥1, 𝑥2, 0)
w
w = 1
(𝑥1, 𝑥2, 1)
𝑤𝑥1, 𝑤𝑥2, 𝑤 , ∀𝑤 > 0
1 0 𝑏10 1 𝑏20 0 1
𝑥1𝑥21
vs
1 0 𝑏10 1 𝑏20 0 1
𝑥1𝑥20

CMU 15-462/662, Fall 2016
Visualizing 2D transformations in 2D-H
Original shape in 2D can be viewed as
many copies, uniformly scaled by w.2D rotation ⬌ rotate around w
2D scale ⬌ scale x and y; preserve w2D translate ⬌ shear in xy(Question: what happens to 2D shape
if you scale x, y, and w uniformly?)
CMU 15-462/662, Fall 2016
Summary so far…
▪ We know how to transform (scale, rotate,
reflect, shear, translate) 2D points and vectors
- All these transforms are linear maps
expressed as matrix-vector products when
using (slightly) higher-dimensional
homogenous coordinates
- How about other types of transforms (e.g.
rotate about an arbitrary point)?
- How about 3D transforms?
CMU 15-462/662, Fall 2016
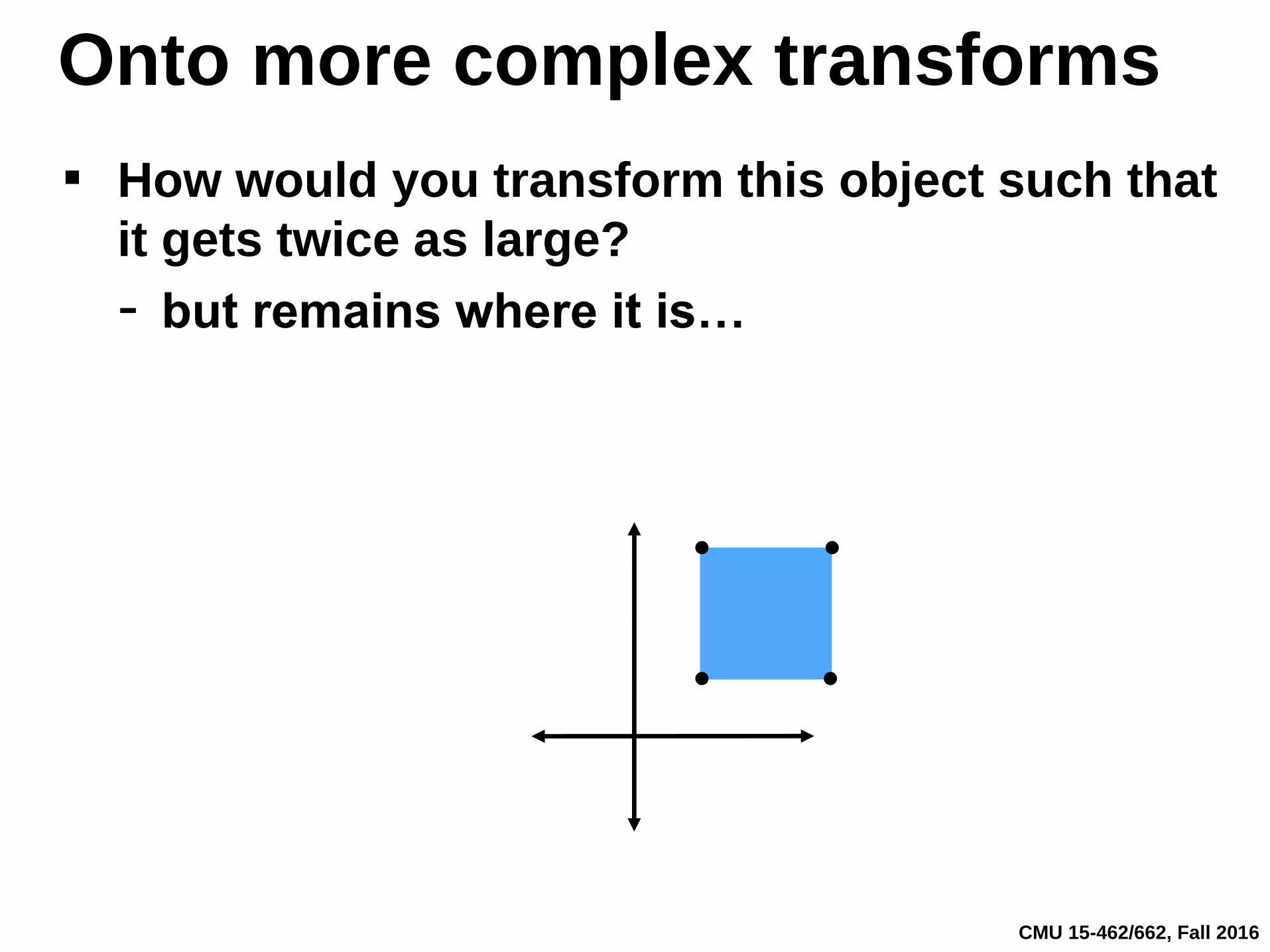
Onto more complex transforms
▪ How would you transform this object such that
it gets twice as large?
- but remains where it is…
CMU 15-462/662, Fall 2016
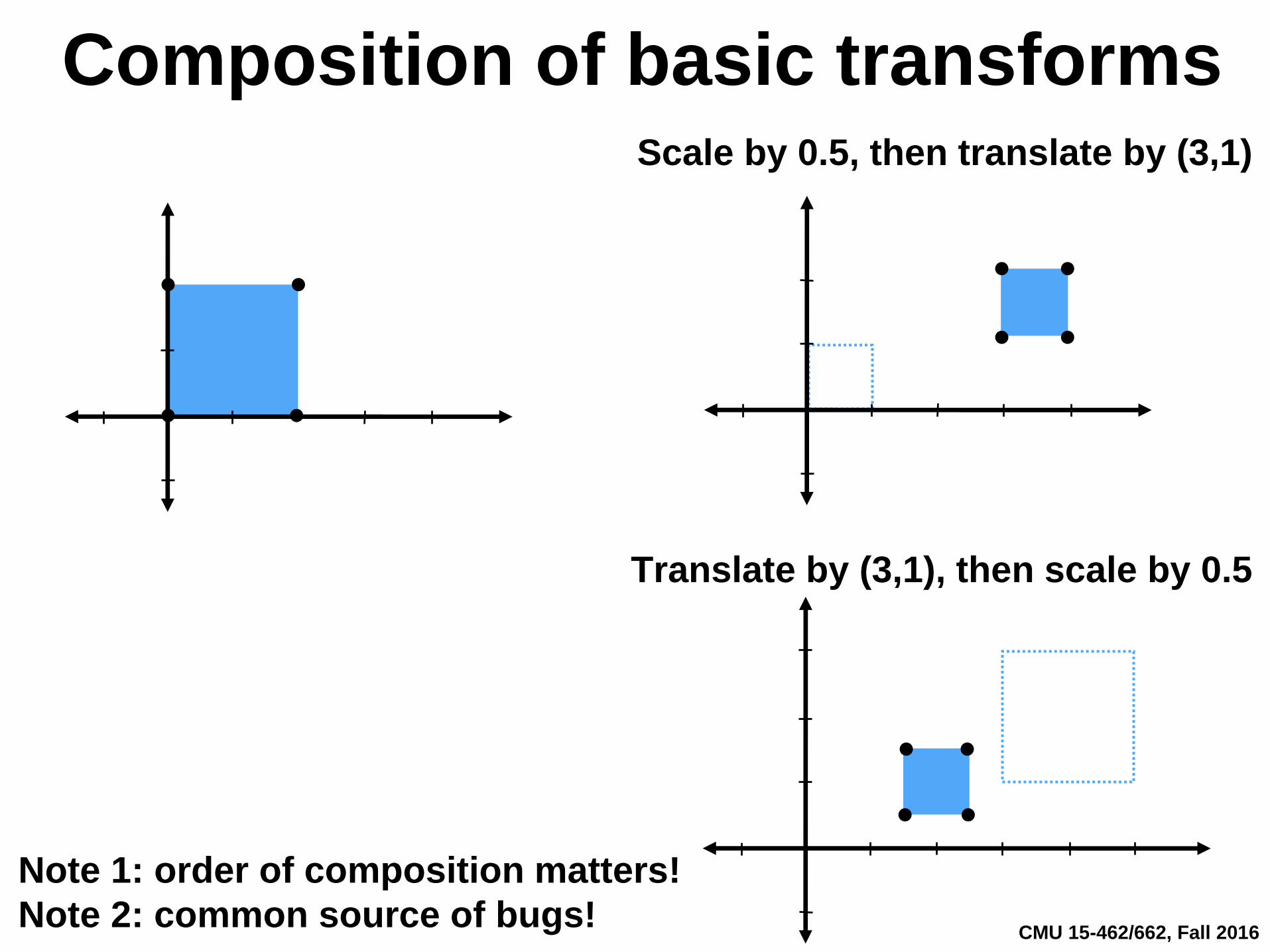
Composition of basic transforms
Note 1: order of composition matters!
Note 2: common source of bugs!
Translate by (3,1), then scale by 0.5
Scale by 0.5, then translate by (3,1)

CMU 15-462/662, Fall 2016
How do we compose linear transforms?
Compose linear transforms via matrix multiplication.
Enables simple & efficient implementation: reduce complex
chain of transforms to a single matrix.
CMU 15-462/662, Fall 2016
How would you perform these transformations?

CMU 15-462/662, Fall 2016
Common pattern: rotation about point x
Step 1: translate by -x
Step 2: rotate Step 3: translate by x
Q: In homogenous coordinates, what does the corresponding
transformation matrix look like?
CMU 15-462/662, Fall 2016
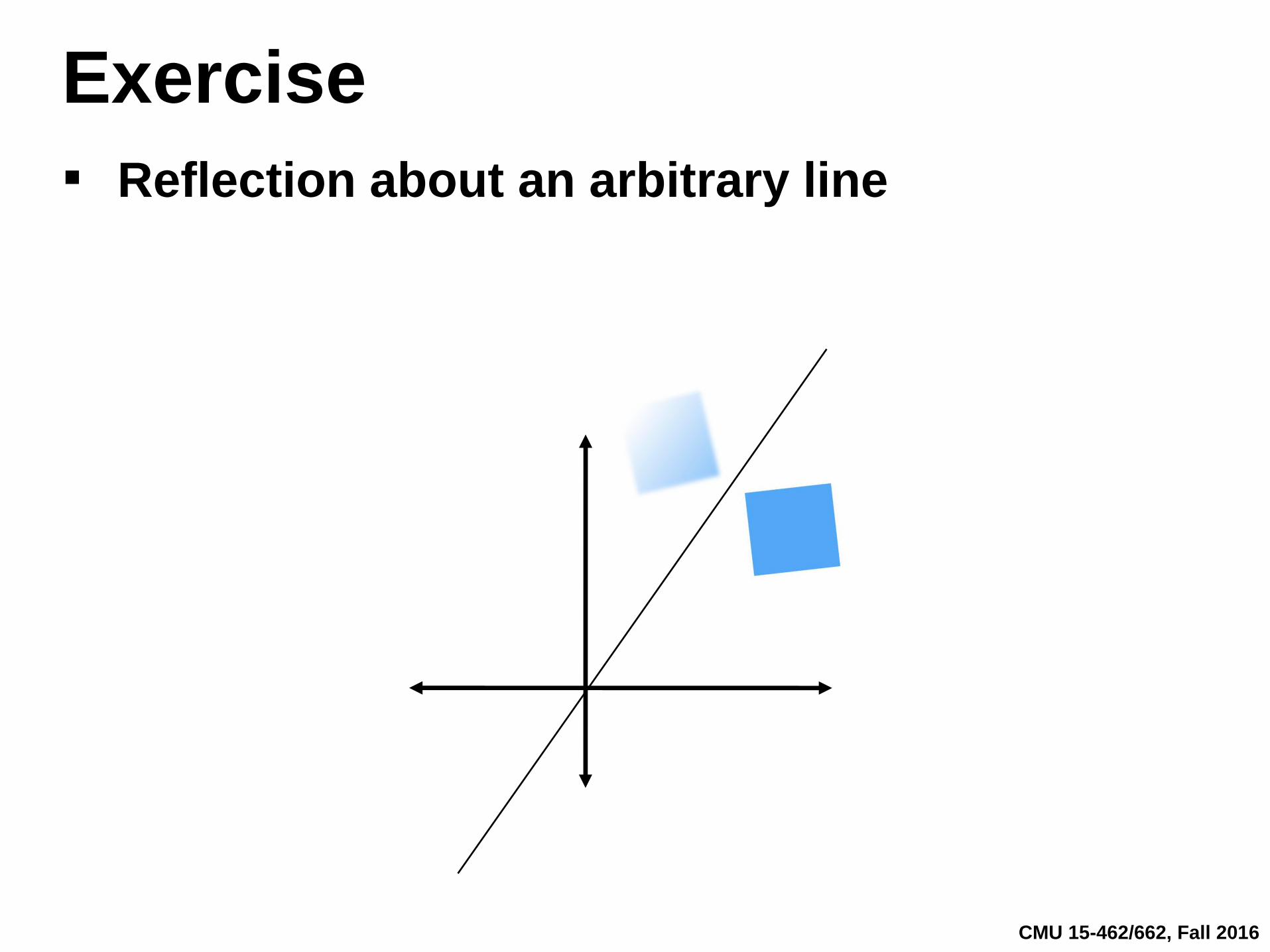
Exercise
▪ Reflection about an arbitrary line









![Lecture 1: Course Intro15462.courses.cs.cmu.edu/spring2021content/lectures/01_intro/01_intro_slides.pdf[sources: Richard Yot, 3D-Ace, contrafibbularities,3ddd.ru] CMU 15-462/662 Assignment](https://img.pdfslide.net/doc/110x75/611f95961edb372b217f469d/lecture-1-course-sources-richard-yot-3d-ace-contraibbularities3dddru-cmu.jpg)