Embed Size (px)
Citation preview
Lekcija 10: Automobilski mehatronički procesimehatronički procesi -suspenzijasuspenzija
Prof dr sc Jasmin VelagićProf.dr.sc. Jasmin VelagićElektrotehnički fakultet Sarajevo
K l ij M h t ikKolegij: Mehatronika
2012/2013
10. Automobilska suspenzija Sistem suspenzije vozila je odgovoran za:
udobnost (komfor) u vožnji, 2/43udobnost (komfor) u vožnji,sigurnost u vožnji (sistem suspenzije nosi tijelo vozila i prenosi sve sile između vozila i ceste).
2/43
Da bi se osigurao utjecaj ovih svojstava uvode se poluaktivne ili/i aktivne komponente koje omogućuju sistemu suspenzije adaptiranje različitim uvjetima vožnje.
..Ubrzanje vozila zB je bitan parametar (kvantitet) za udobnost putnika u vožnji.
..
Dinamička promjena opterećenja gume Fzdyn je mjera za sigurnost – indicira djelovanje sile između gume i cesteceste.

Automobilska suspenzija Sistem suspenzije
3/433/43
Automobilska suspenzija Poluaktivna suspenzija omogućuje adaptaciju prigušivačkih karakteristika amortizera na promjenu
4/43opterećenja kotača i deflekcije suspenzije, npr. aktivna papučica gasa.
4/43
Osnovna ideja poluaktivne suspenzije je adaptacija parametara amortizera ili opruga tijela vozila na trenutne uvjete ceste i odgovarajuću situaciju u vožnjitrenutne uvjete ceste i odgovarajuću situaciju u vožnji. Ovo se postiže ugradivim procesorom, koji indicira da se elektronika mehanika i softver istovremenose elektronika, mehanika i softver istovremeno razmatraju.Potrebno je podizati, odnosno, spuštati kotače i na tajPotrebno je podizati, odnosno, spuštati kotače i na taj način minimizirati vertikalno kretanje vozila.Sigurnost tokom vožnje je ugrožena zbog neravnina g j j g gna cesti koje uzrokuju vibracije kotača i vozila.
Automobilska suspenzija Neophodno je osigurati zadovoljavajuće prigušenjeovih vibracija (rezonancije).
5/43Vibracije snažno utječu na povećanje opterećenja kotača.
5/43
Ovo opterećenje će se smanjiti usljed podizanja kotača.Na o aj način trenje i međ kotača i ceste odnosnoNa ovaj način trenje između kotača i ceste, odnosno razvijena sila kotača prema cesti pada na nulu, što može dovesti do problema kada se vozilo nalazi u pkrivini.Ovi problemi se mogu izbjeći povećanjem prigušenja (veliki iznos).Međutim to povećanje prigušenja dovodi do negativnih
f k t k f ž ji j ć tj j iefekata na komfor u vožnji, jer će se utjecaj neravnina direktno prenositi na vozilo, a samim time i na putnike.
Automobilska suspenzija Ovo je posebno izraženo za vibracije u području 4-8 Hz, koje su neprijatne ili se manifestiraju 6/43neudobnom (nekomfornom) vožnjom.Glavni zadatak je pronaći razuman kompromis
6/43
između sigurnosti vožnje i komfora u vožnji.Poluaktivna suspenzija se temelji na principu da
i š j j t t ž biti ij jprigušenje uvjeta ceste može biti mijenjano na odgovarajući način tokom putovanja.Problematične situacije u vožnji zahtijevaju visokuProblematične situacije u vožnji zahtijevaju visoku razinu prigušenja koja se prvo prepoznaje razmatranjem vertikalnog ubrzanja tijela vozila, izrazmatranjem vertikalnog ubrzanja tijela vozila, iz kojeg se trigerovanjem ove vibracije sa cestom mogu reducirati.
Automobilska suspenzija Dodatno, manevri tokom vožnje, koji također zahtijevaju povećanje stabilnosti, se automatski 7/43j j p j ,prepoznaju, kao naprimjer naglo kočenje, brza vožnja u krivinama ili brzo pritiskanje papučice
7/43
gasa.Rezultirajuće poniranje i valjanje vozila treba biti j p j j jlimitirano većim prigušenjem.Nakon identifikacije uvjeta ceste i stanja vožnje,Nakon identifikacije uvjeta ceste i stanja vožnje, sljedeći korak je određivanje ispravne razine prigušenja i postavljanje njene vrijednosti na p g j p j j j jamortizer.
Automobilska suspenzija
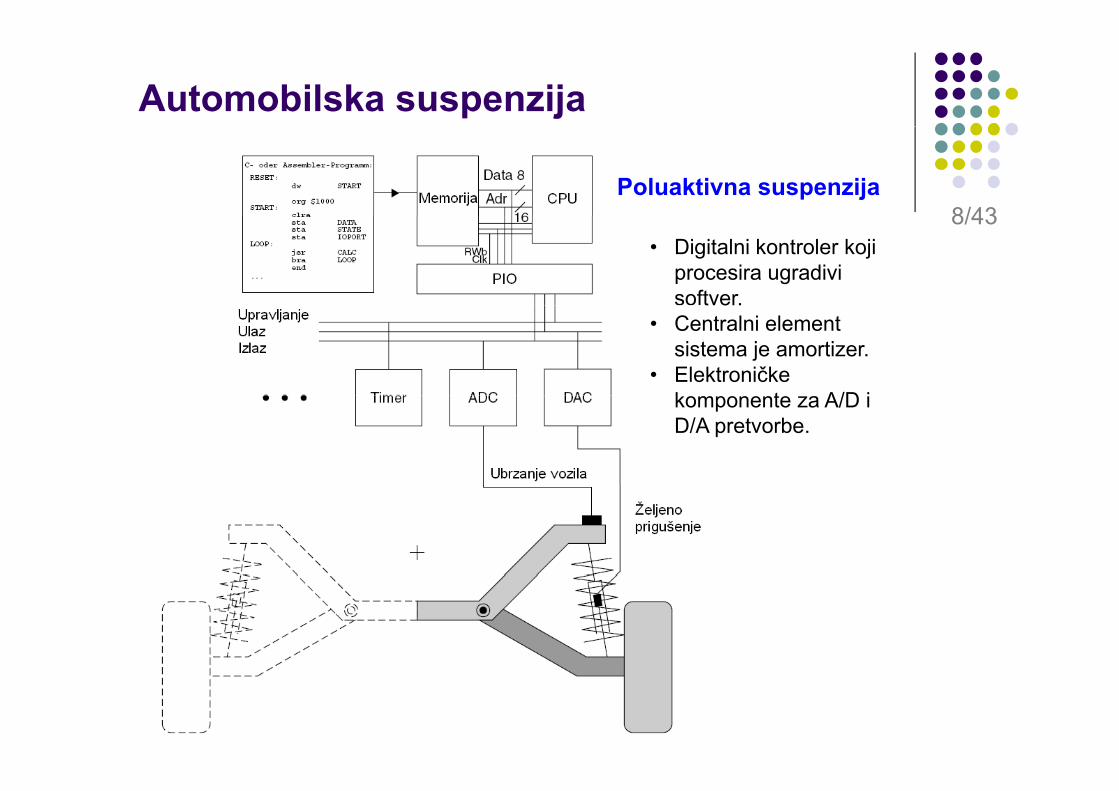
Poluaktivna suspenzija8/43
• Digitalni kontroler koji procesira ugradivi softver.
8/43
• Centralni element sistema je amortizer.
• Elektroničke k t A/D ikomponente za A/D i D/A pretvorbe.
Automobilska suspenzija Amortizer
Amortizer koristi Stokesovo trenje viskozne tekućine 9/43Amortizer koristi Stokesovo trenje viskozne tekućine, naprimjer hidrauličkog ulja, da bi pretvorio energiju kretanja u toplotu.
9/43
Ulje se sabija kroz uski ventil u skladu sa kretanjem kotača, odnosno vozila.Ako se upravlja putanjom ulja u skladu sa smjerom protoka, tada se različiti dijametri ventila, odnosno različite konstante prigušenja, mogu postići za kompresiju i naprezanje.Osim toga, nekoliko karakterističnih linija prigušenja se može planirati za odgovarajući amortizer.
Automobilska suspenzija Amortizer
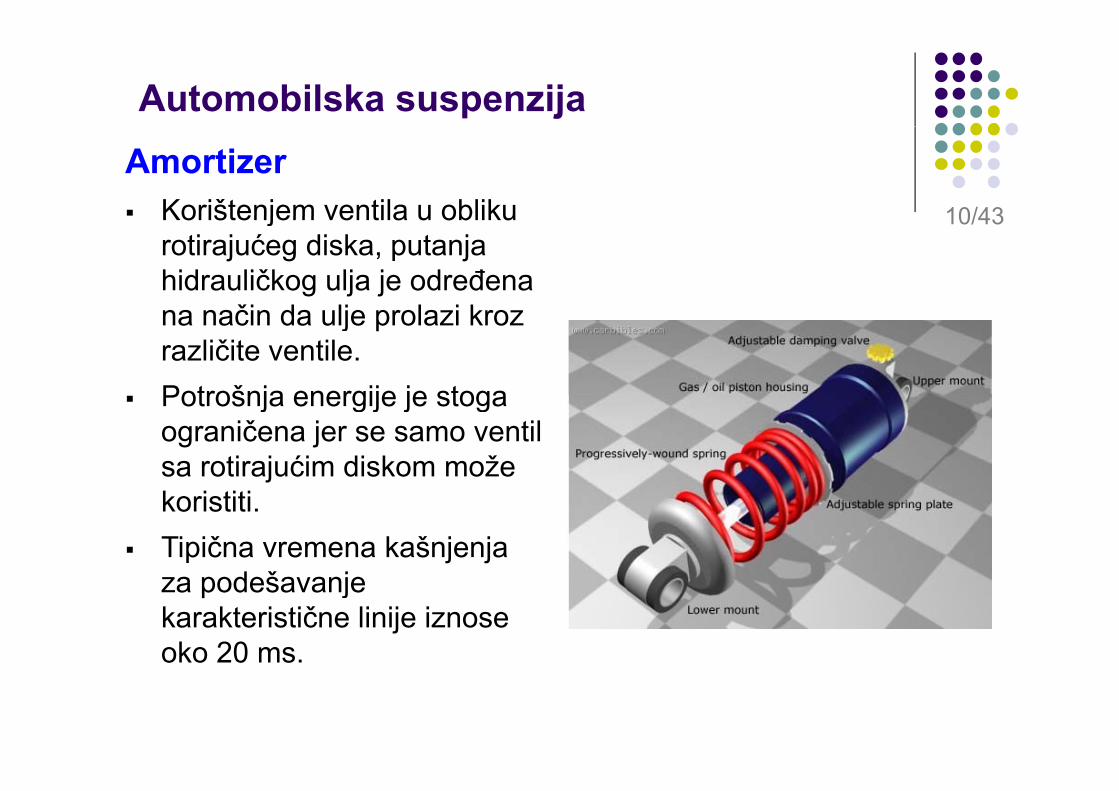
Korištenjem ventila u obliku 10/43Korištenjem ventila u obliku rotirajućeg diska, putanja hidrauličkog ulja je određena
či d lj l i k
10/43
na način da ulje prolazi kroz različite ventile. Potrošnja energije je stogaPotrošnja energije je stoga ograničena jer se samo ventil sa rotirajućim diskom može koristiti. Tipična vremena kašnjenja
d š jza podešavanje karakteristične linije iznose oko 20 ms.
Automobilska suspenzija Modeliranje softvera
Softver se izvršava na ugradivom procesoru 11/43Softver se izvršava na ugradivom procesoru (naprimjer procesori kompatibilni sa 68HC05).N jč šć iš C k č
11/43
Najčešće se piše u C-u, nakon čega se inicijalno prevodi (kompajlira) u Asembler i d lj k jli ši ki k ddalje prekompajlira u mašinski kod. Za testiranje softvera se najčešće koriste j jmehatroničke hardver/softver kosimulacije. Jednostavniji modeli opisuju ovisnosti izmeđuJednostavniji modeli opisuju ovisnosti između ubrzanja i karakteristika prigušenja.
Automobilska suspenzija Upravljanje poluaktivnim amortizerom
Nove mogućnosti se pojavljuju sa elektro 12/43Nove mogućnosti se pojavljuju sa elektro-reoločkih fluida.N lj d ć l jd ik i l kti i
12/43
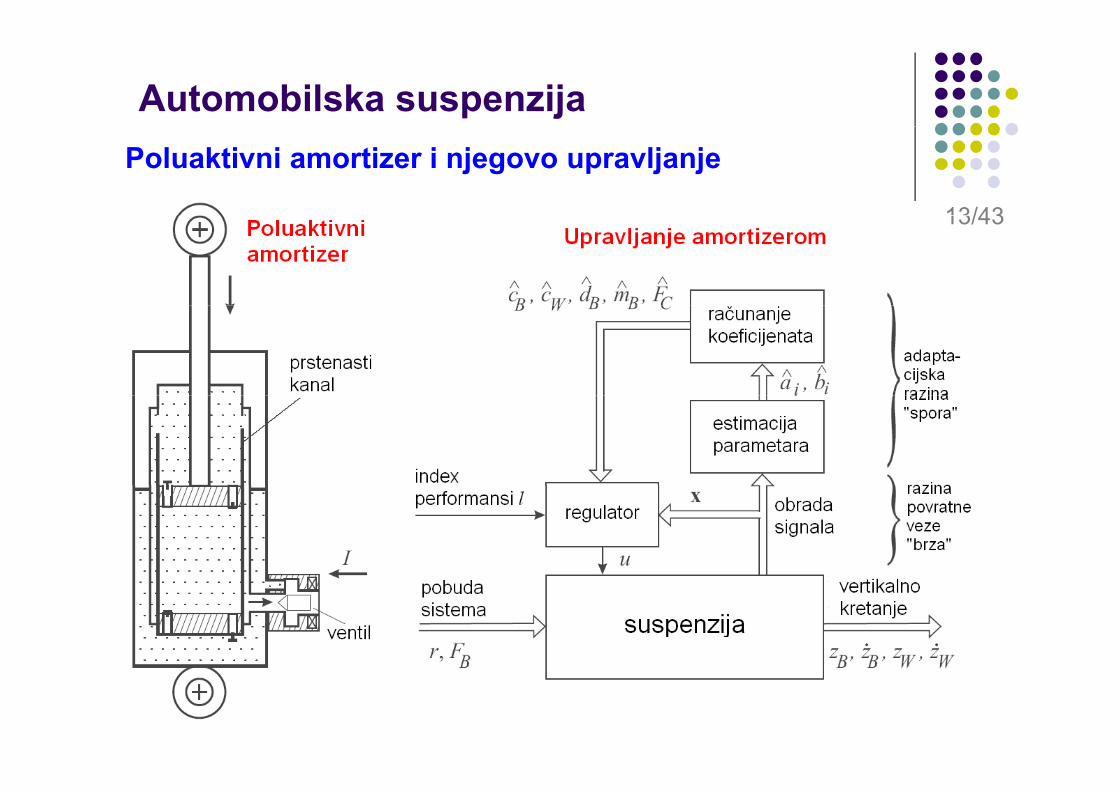
Na sljedećem slajdu su prikazani poluaktivni amortizer i njegovo upravljanje.Upravljanje se sastoji od klasične regulacijske petlje (brza petlja) i adaptacijske petlje (spora
tlj ) k j č j t ipetlja) kojom se preračunavaju parametri regulatora usljed promjena u sistemu.
Automobilska suspenzija Poluaktivni amortizer i njegovo upravljanje
13/4313/43
Automobilska suspenzija Aktivna suspenzija osigurava poseban ulaz sile kao dodatak na postojeće pasivne opruge.
14/43One se mogu realizirati kao hidraulički, hidro-pneumatski ili kao pneumatski sistemi.Zahtijevana energija za putnička vozila u radnom opsegu od
14/43
Zahtijevana energija za putnička vozila u radnom opsegu od 0 do 5 Hz iznosi 1-2kW, a između 0-12 Hz iznosi 2-7 KW. Na sljedećoj slici je prikazan primjer hidrauličke aktivne suspenzije sa hidrauličkim klipom u seriji sa čeličnom oprugom.Ovaj koncept je dizajniran kako bi se smanjilaOvaj koncept je dizajniran kako bi se smanjila niskofrekvencijska kretanja vozila (f < 2Hz), usljed valjanja i poniranja (posrtanja) i reducirale visokofrekvencijske pobude od strane ceste (f > 6Hz). Ovo je regulirano sa state-feedback regulatorom sa mjerenjem deflekcije zWB između tijela vozila i kotača imjerenjem deflekcije zWB između tijela vozila i kotača i ubrzanja tijela vozila zB.
..
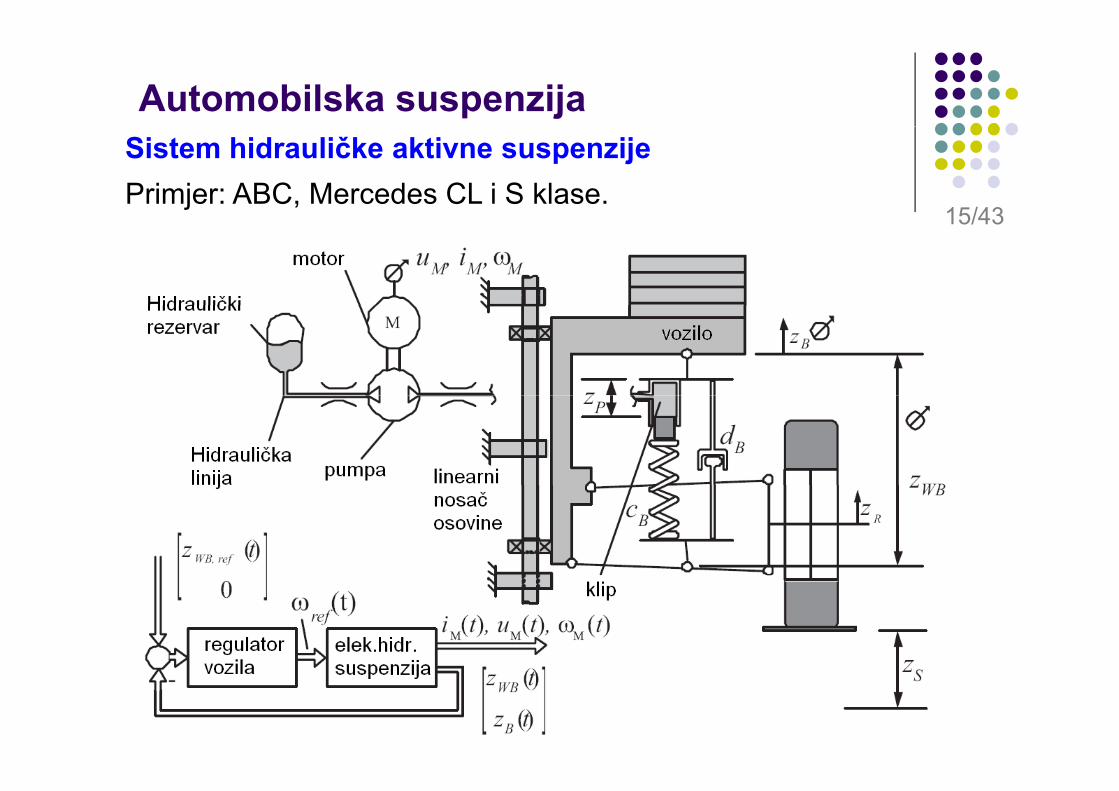
Automobilska suspenzija Sistem hidrauličke aktivne suspenzijePrimjer: ABC, Mercedes CL i S klase.
15/4315/43
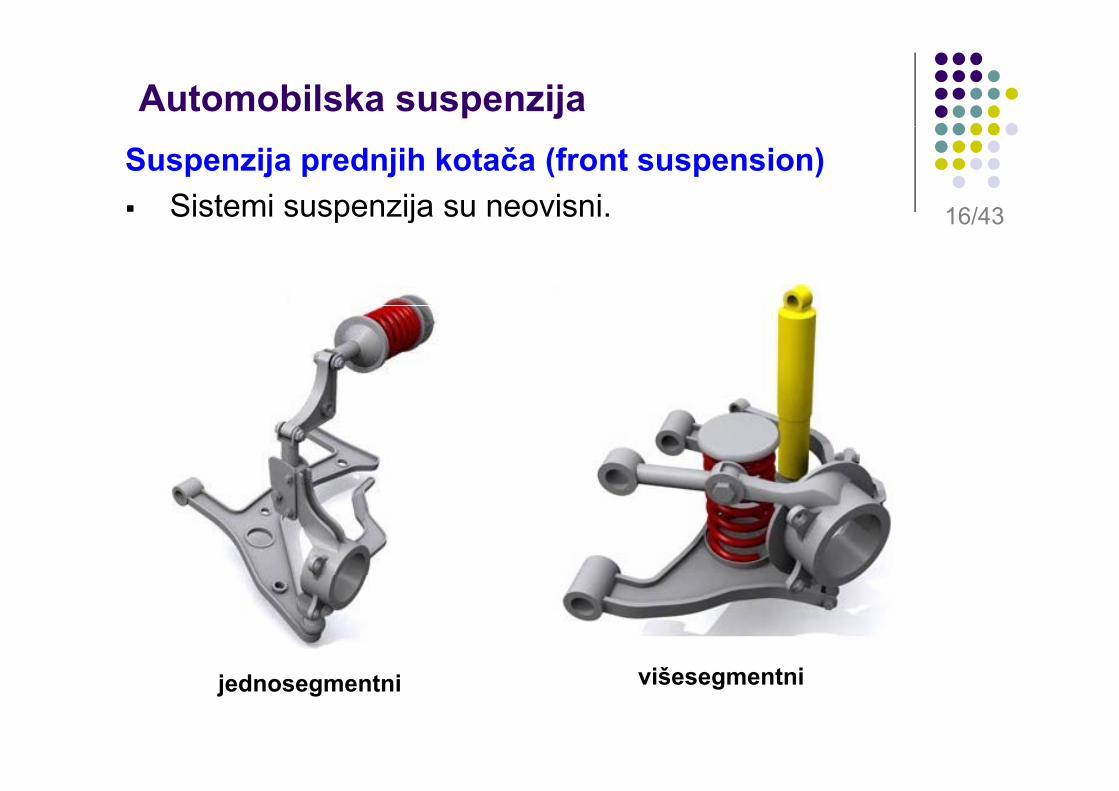
Automobilska suspenzija Suspenzija prednjih kotača (front suspension)
Sistemi suspenzija su neovisni. 16/43Sistemi suspenzija su neovisni. 16/43
jednosegmentni višesegmentni

Automobilska suspenzija Suspenzija zadnjih kotača (rear suspension)
Sistemi suspenzije su međusobno ovisni (povezani 17/43Sistemi suspenzije su međusobno ovisni (povezani sistemi)
17/43
Automobilska suspenzija Linearna elektromagnetska suspenzija
Najnoviji sistem automobilske suspenzije. 18/43Najnoviji sistem automobilske suspenzije.Umjesto opruga i amortizera na svakom kraju automobila, koriste se linearni elektromagnetski
18/43
gmotori i pojačala snage.Kada pojačalo snage napaja namote motora, motor podiže i spušta ovjes i na taj način upravlja kretanjem između kotača i tijela vozila.Li i l kt t ki t i bLinearni elektromagnetski motor reagira veoma brzo na pobudu i obavlja zadatke koji su ranije bili rezervirani za amortizerrezervirani za amortizer.

Automobilska suspenzija Linearna elektromagnetska suspenzija
19/4319/43
Sistem LEM suspenzije
Automobil uAutomobil u zavoju
Standardna suspenzija sa amortizerom LEM suspenzija
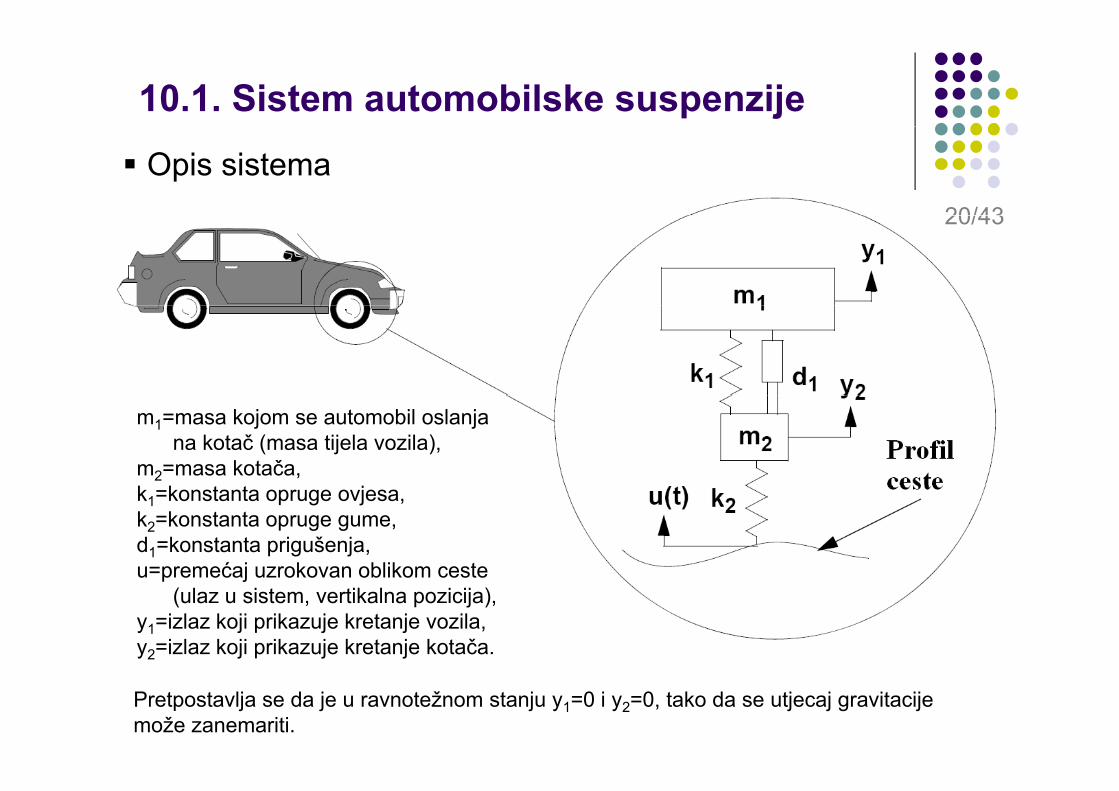
10.1. Sistem automobilske suspenzijeOpis sistema
20/4320/43
m1=masa kojom se automobil oslanja na kotač (masa tijela vozila),
m2=masa kotača,k1=konstanta opruge ovjesa,k2=konstanta opruge gume,d1=konstanta prigušenja,u=premećaj uzrokovan oblikom cesteu premećaj uzrokovan oblikom ceste
(ulaz u sistem, vertikalna pozicija),y1=izlaz koji prikazuje kretanje vozila,y2=izlaz koji prikazuje kretanje kotača.
Pretpostavlja se da je u ravnotežnom stanju y1=0 i y2=0, tako da se utjecaj gravitacijemože zanemariti.
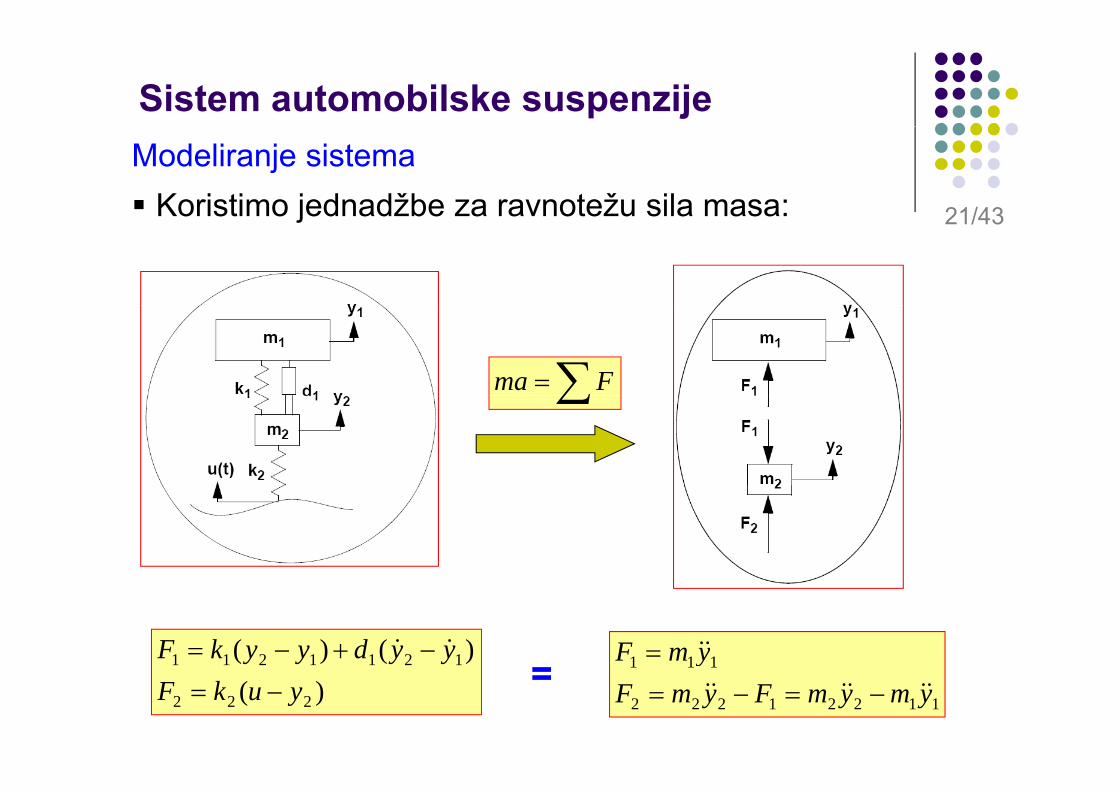
Sistem automobilske suspenzijeModeliranje sistema
Koristimo jednadžbe za ravnotežu sila masa: 21/43Koristimo jednadžbe za ravnotežu sila masa: 21/43
∑= Fma ∑
111 ymF &&=)()( 1211211 yydyykF −+−= &&
11221222
111
ymymFymFy
&&&&&& −=−=)( 222
1211211
yukF −= =
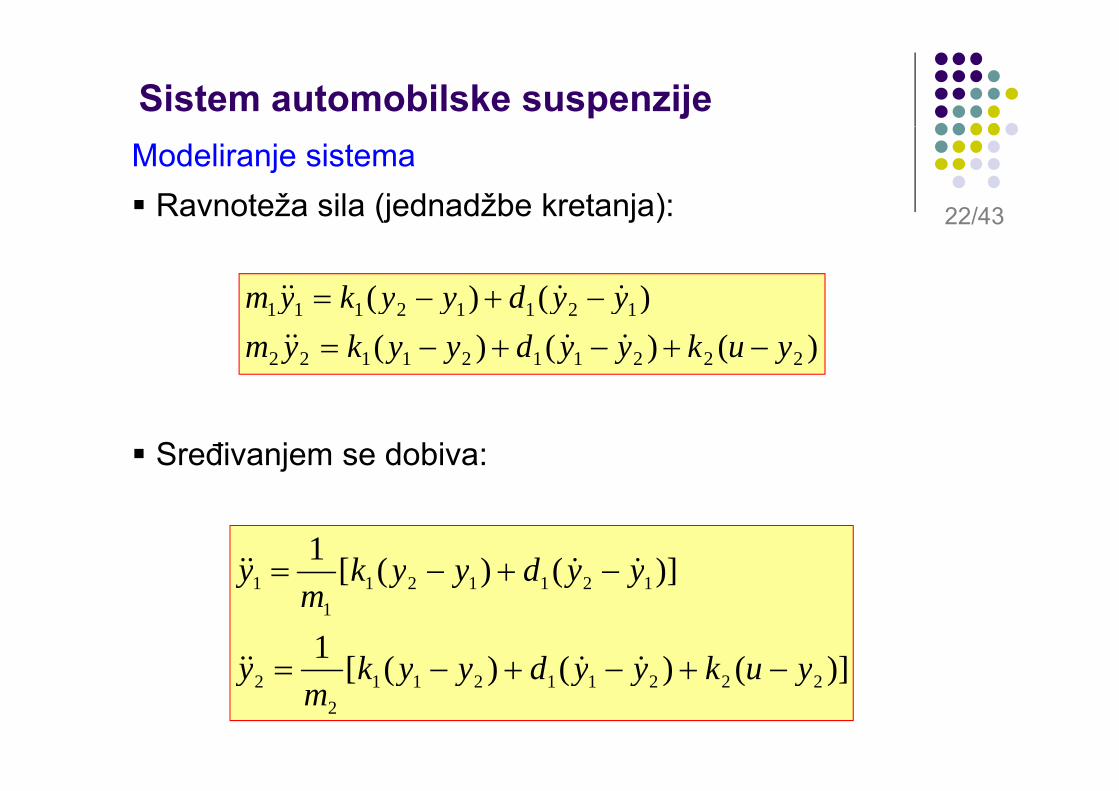
Sistem automobilske suspenzijeModeliranje sistema
Ravnoteža sila (jednadžbe kretanja): 22/43Ravnoteža sila (jednadžbe kretanja):
)()( 12112111 yydyykym −+−= &&&&
22/43
)()()()()(
2221121122
12112111
yukyydyykymyydyykym
−+−+−=+
&&&&
Sređivanjem se dobiva:
)]()([1 yydyyky −+−= &&&&
)]()()([1
)]()([ 1211211
1
yukyydyyky
yydyykm
y
++
+=
&&&& )]()()([ 222112112
2 yukyydyykm
y −+−+−=
Sistem automobilske suspenzijeModeliranje sistema
Idemo na prikaz modela u prostoru stanja. 23/43Idemo na prikaz modela u prostoru stanja.Prvo se odabiru stanja, a nakon toga uspostavljaju jednadžbe u prostoru stanja.
23/43
j p jSvakoj masi se pridružuju dva stanja, njena pozicija i brzina, respektivno., pVektor stanja prikazuje minimalan broj informacija neophodan u danom trenutku t da bi se bilo u stanju p jpredvidjeti (predikcija) ponašanje sistema.Prostor stanja je prikladan za složenije sisteme j j j(sistemi visokog reda), a posebno za viševarijabilne sisteme (MIMO sistemi).
Sistem automobilske suspenzijeModeliranje sistema
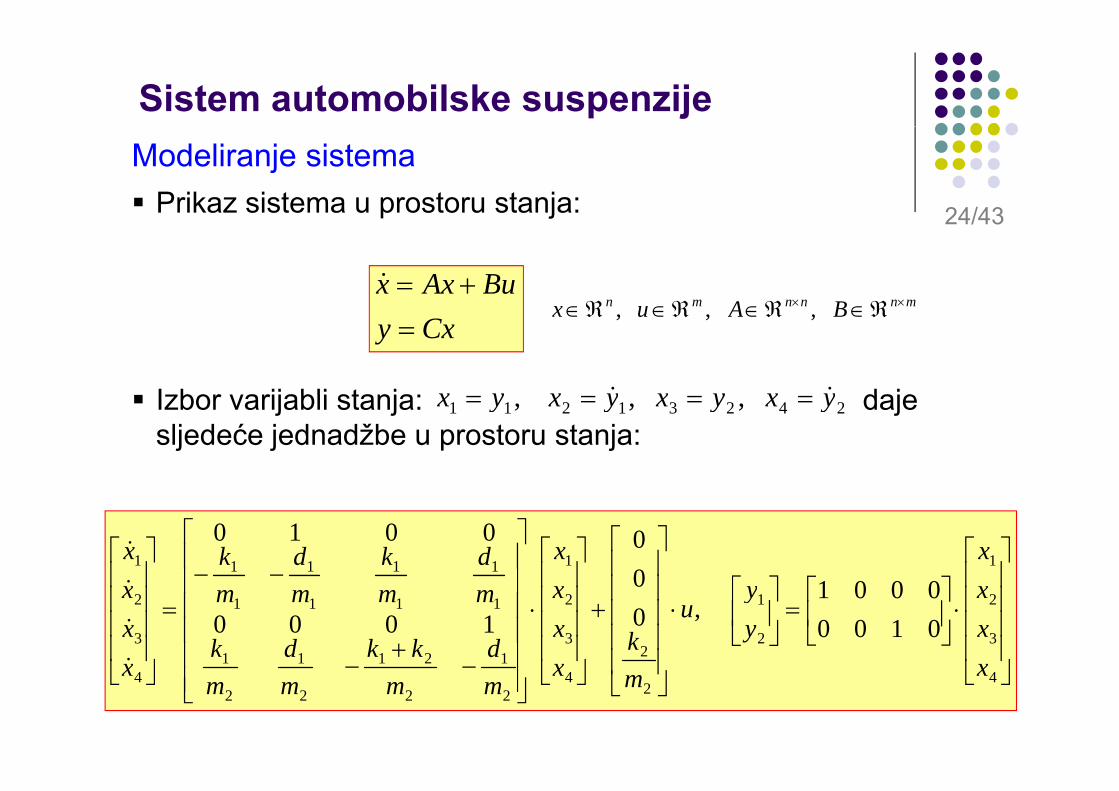
Prikaz sistema u prostoru stanja: 24/43p j
BuAxx +=&mnnnmn BA ×× ℜℜℜℜ
24/43
Izbor varijabli stanja: daje
Cxy =
yxyxyxyx &&
mnnnmn BAux ℜ∈ℜ∈ℜ∈ℜ∈ , , ,
Izbor varijabli stanja: daje sljedeće jednadžbe u prostoru stanja:
24231211 , , , yxyxyxyx ====
⎥⎤
⎢⎡
⎥⎥⎤
⎢⎢⎡
⎥⎤
⎢⎡
⎥⎥⎤
⎢⎢⎡
−−⎥⎤
⎢⎡ 1111111
000010
xxdkdkx&
⎥⎥⎥⎥
⎦⎢⎢⎢⎢
⎣
⋅⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⋅
⎥⎥⎥⎥⎥
⎢⎢⎢⎢⎢
+
⎥⎥⎥⎥
⎦⎢⎢⎢⎢
⎣
⋅
⎥⎥⎥⎥
⎢⎢⎢⎢
+
−−=
⎥⎥⎥⎥
⎦⎢⎢⎢⎢
⎣3
2
2
1
23
2
12111
1111
3
2
01000001
,00
1000
xxx
yy
uk
xxx
dkkdk
mmmm
xxx
&
&
&
⎦⎣⎥⎦
⎢⎣⎦⎣⎥
⎥⎦⎢
⎢⎣
−−⎦⎣ 42
42222
4 xmxmmmm
x
Sistem automobilske suspenzijeModeliranje sistema
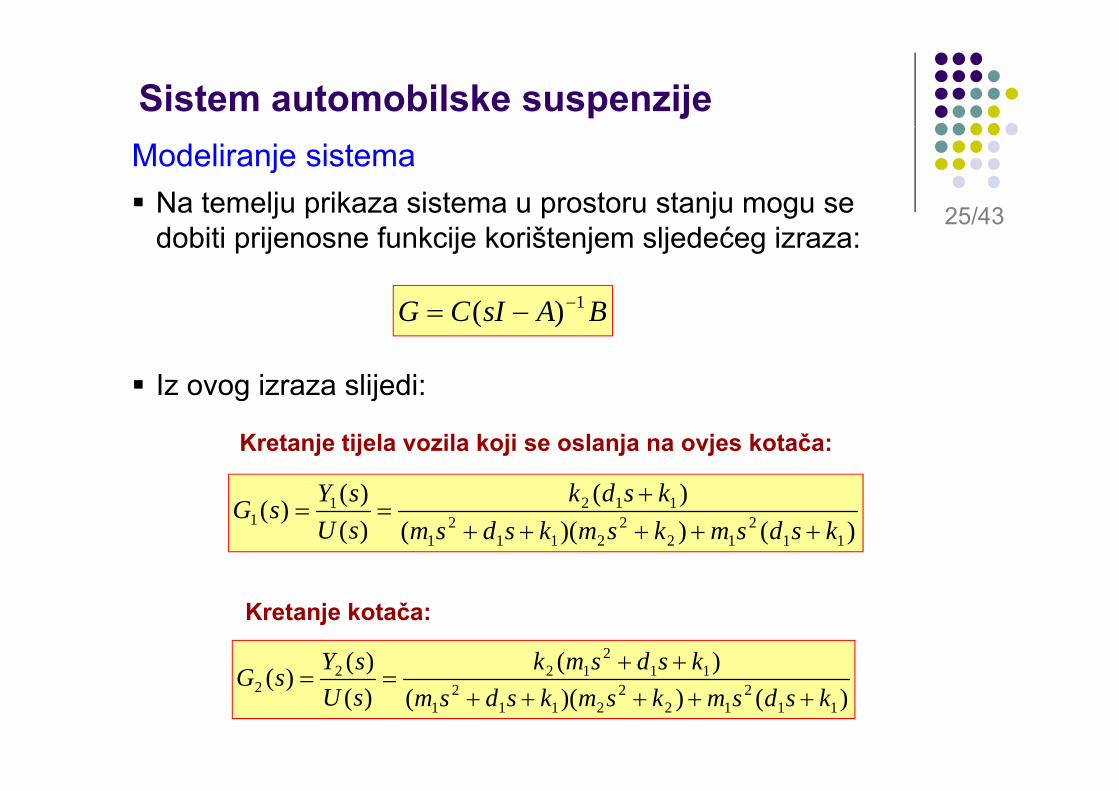
Na temelju prikaza sistema u prostoru stanju mogu se 25/43j p p j gdobiti prijenosne funkcije korištenjem sljedećeg izraza:
BAICG 1)( −
25/43
Iz ovog izraza slijedi:
BAsICG 1)( −=
g j
)()( kdkY
Kretanje tijela vozila koji se oslanja na ovjes kotača:
)())(()(
)()()(
112
122
2112
1
11211 ksdsmksmksdsm
ksdksUsYsG
++++++
==
)()( 2 ksdsmksY ++
Kretanje kotača:
)())(()(
)()()(
112
122
2112
1
111222 ksdsmksmksdsm
ksdsmksUsYsG
+++++++
==
Sistem automobilske suspenzijeModeliranje sistema
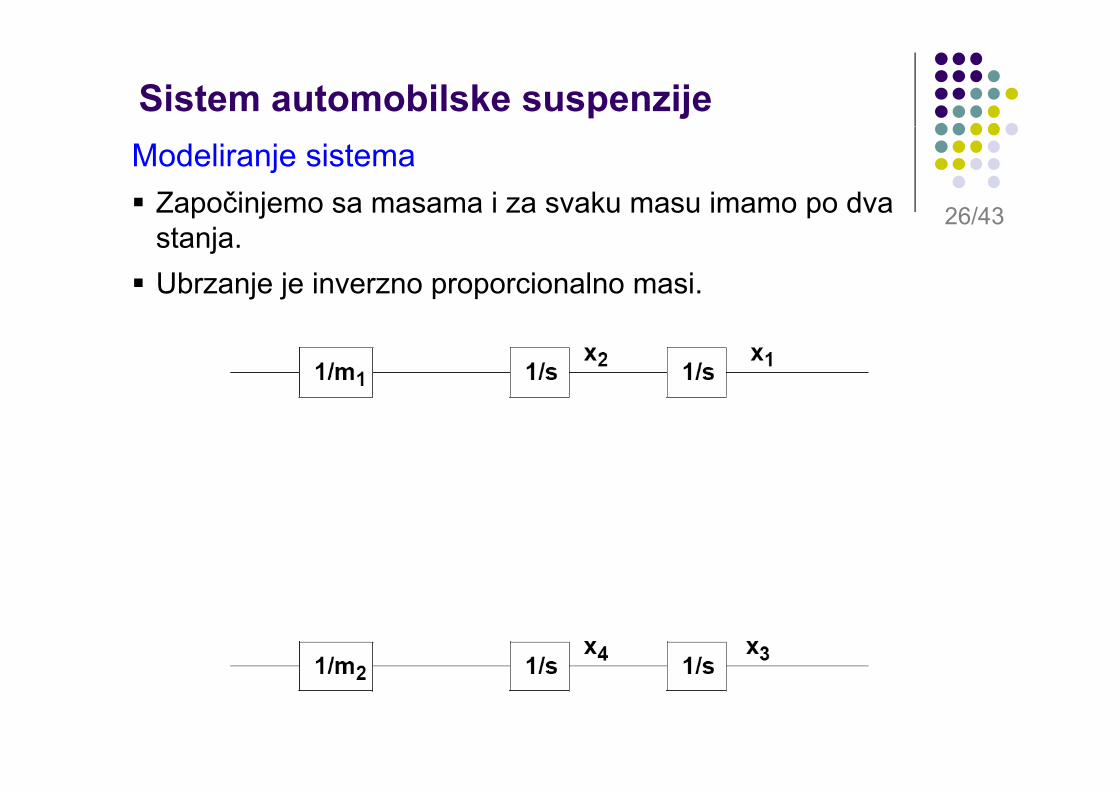
Započinjemo sa masama i za svaku masu imamo po dva 26/43p j pstanja. Ubrzanje je inverzno proporcionalno masi.
26/43
Sistem automobilske suspenzijeModeliranje sistema
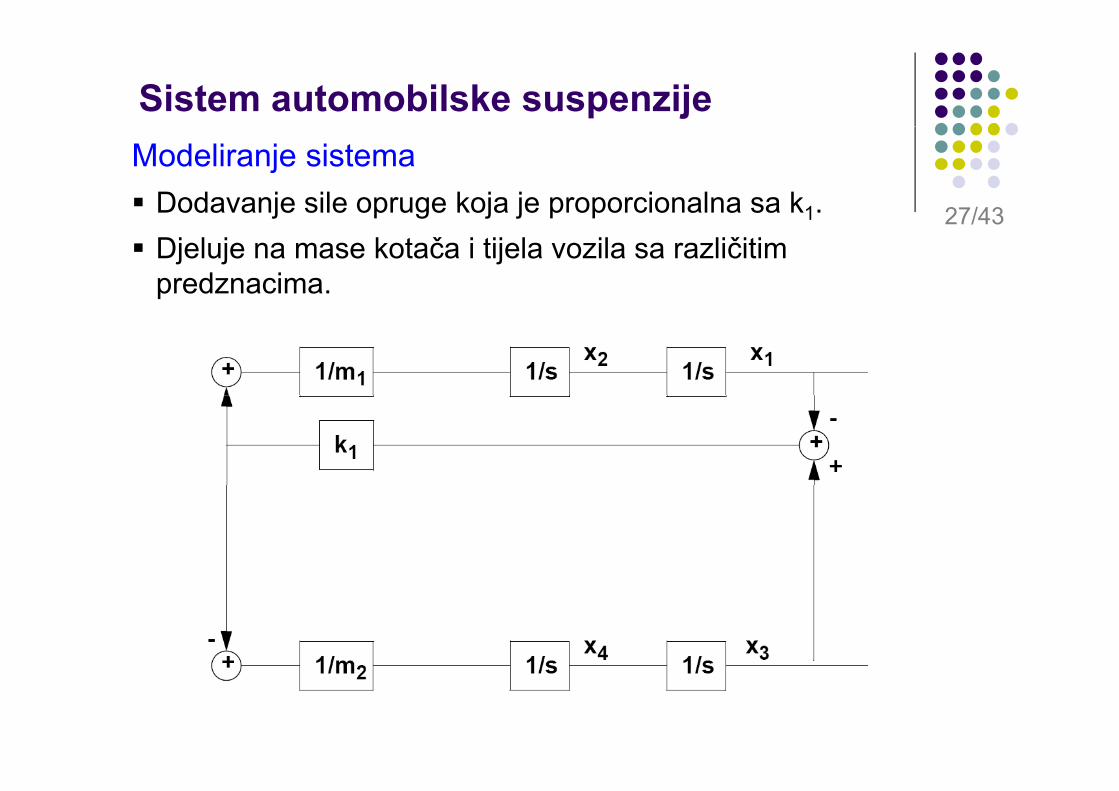
Dodavanje sile opruge koja je proporcionalna sa k1. 27/43j p g j j p p 1
Djeluje na mase kotača i tijela vozila sa različitim predznacima.
27/43
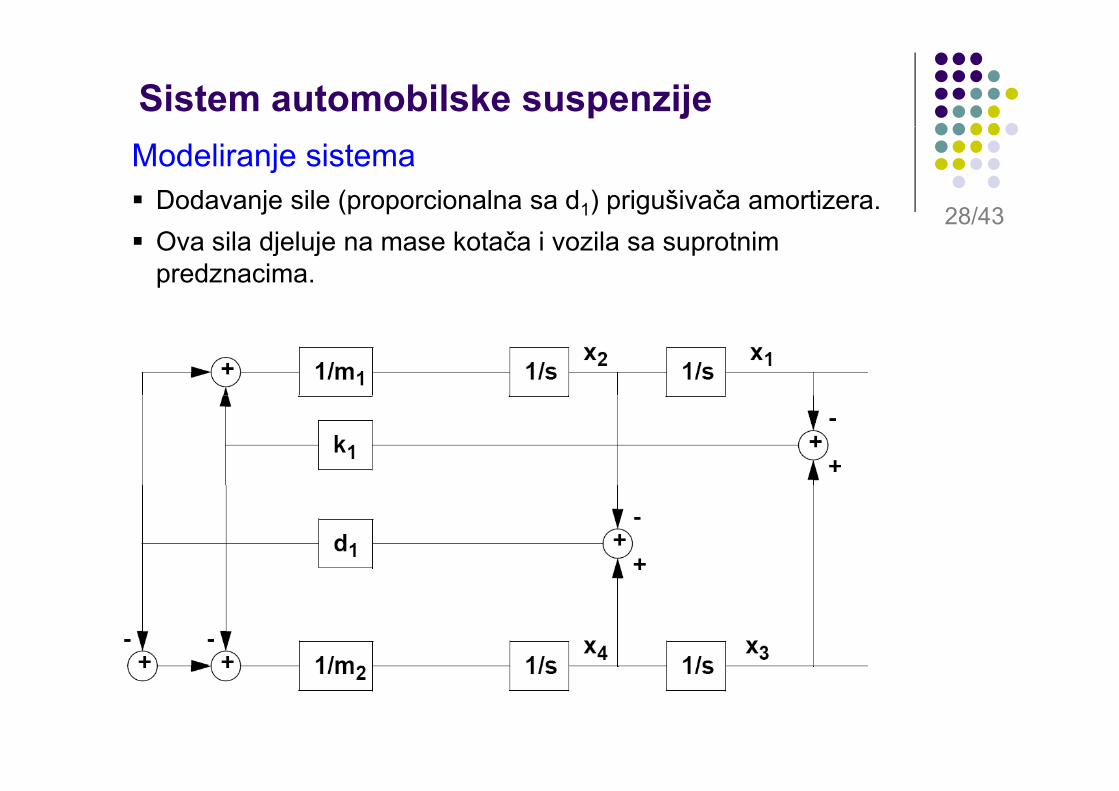
Sistem automobilske suspenzijeModeliranje sistema
Dodavanje sile (proporcionalna sa d1) prigušivača amortizera. 28/43Ova sila djeluje na mase kotača i vozila sa suprotnim predznacima.
28/43
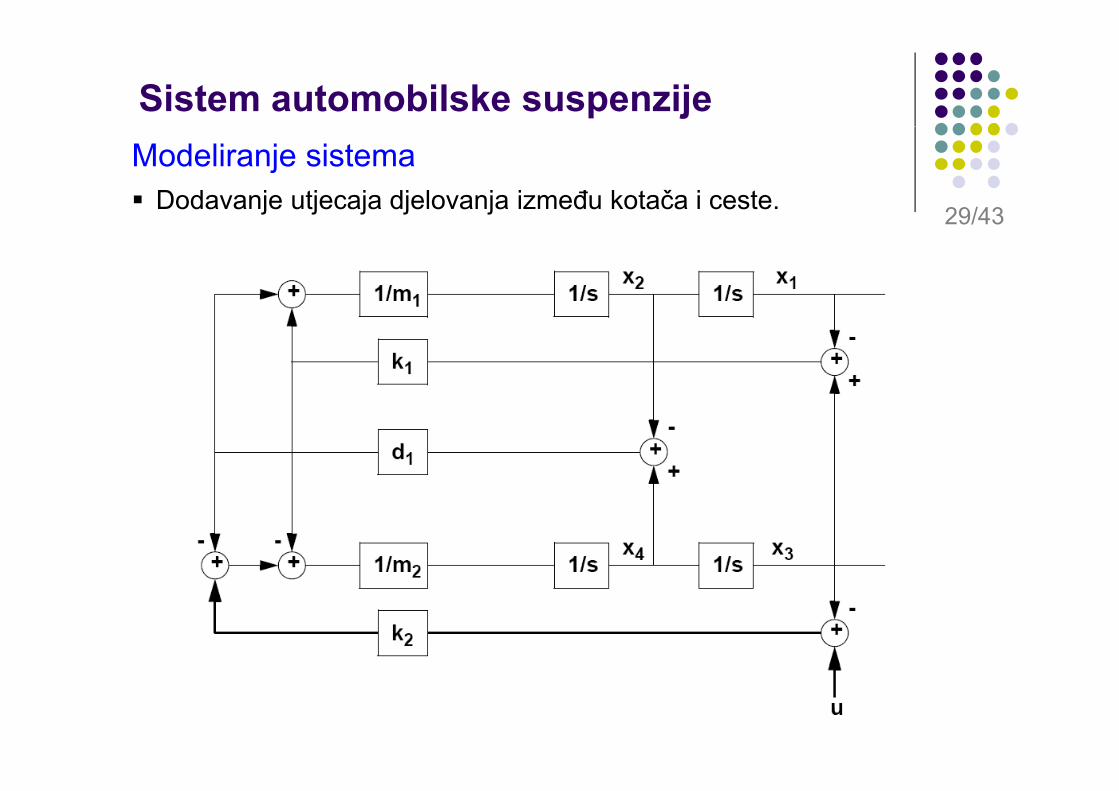
Sistem automobilske suspenzijeModeliranje sistema
Dodavanje utjecaja djelovanja između kotača i ceste. 29/4329/43
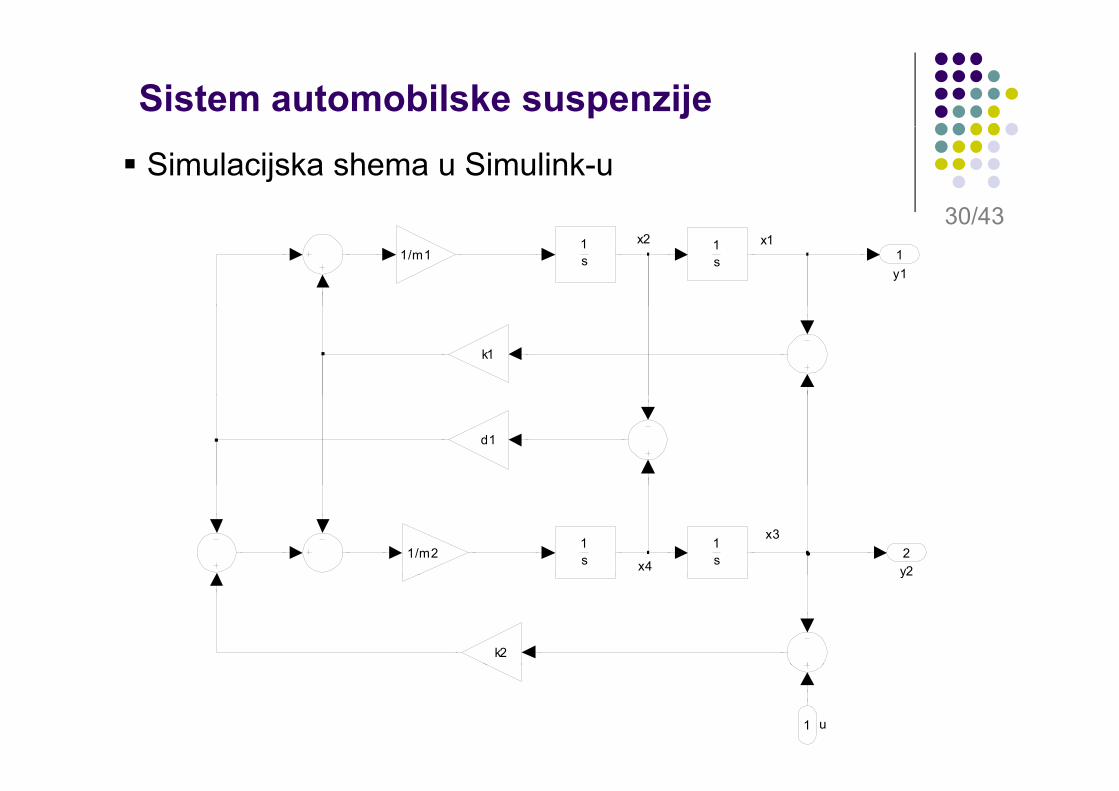
Sistem automobilske suspenzijeSimulacijska shema u Simulink-u
30/43x1x2
y11
1s
1s1/m1
30/43
k1
d1
x4
x3
y22
1s
1s1/m2
y2
k2
u1
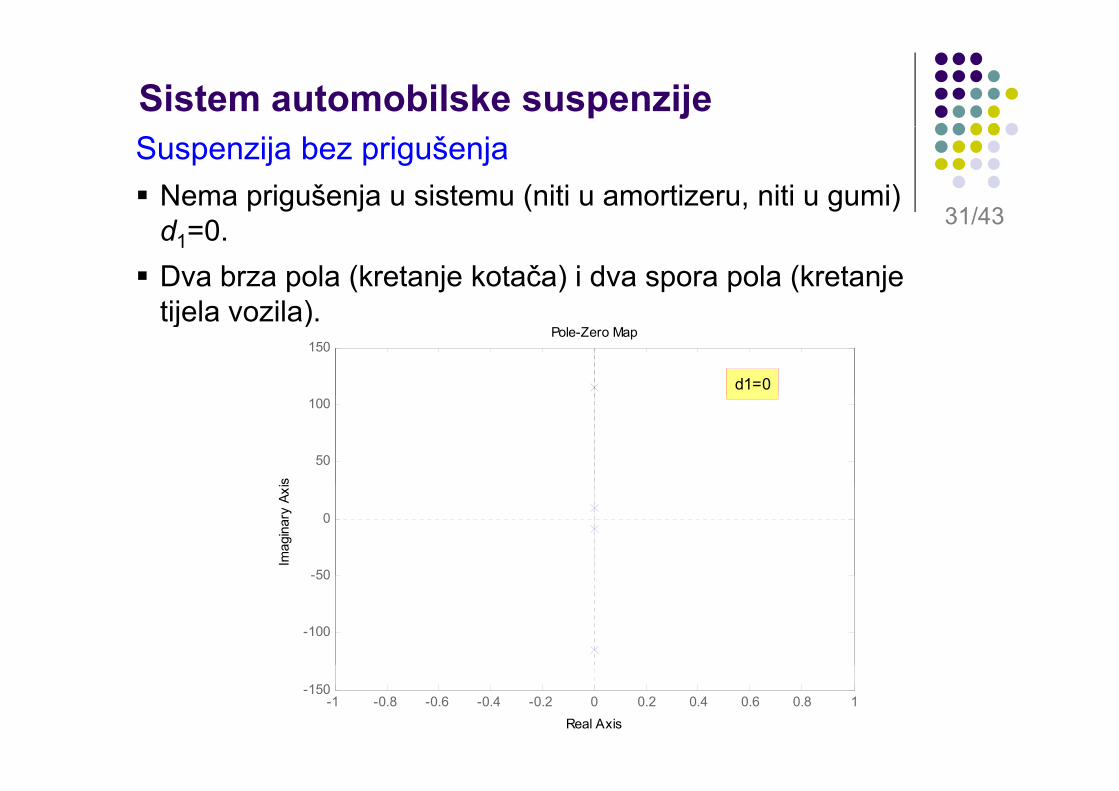
Sistem automobilske suspenzijeSuspenzija bez prigušenja
Nema prigušenja u sistemu (niti u amortizeru, niti u gumi) 31/43d1=0.
Dva brza pola (kretanje kotača) i dva spora pola (kretanje tijela o ila)
31/43
tijela vozila).150
Pole-Zero Map
d1=0
50
100
is
50
0
Imag
inar
y Ax
i
-100
-50
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1-150
Real Axis
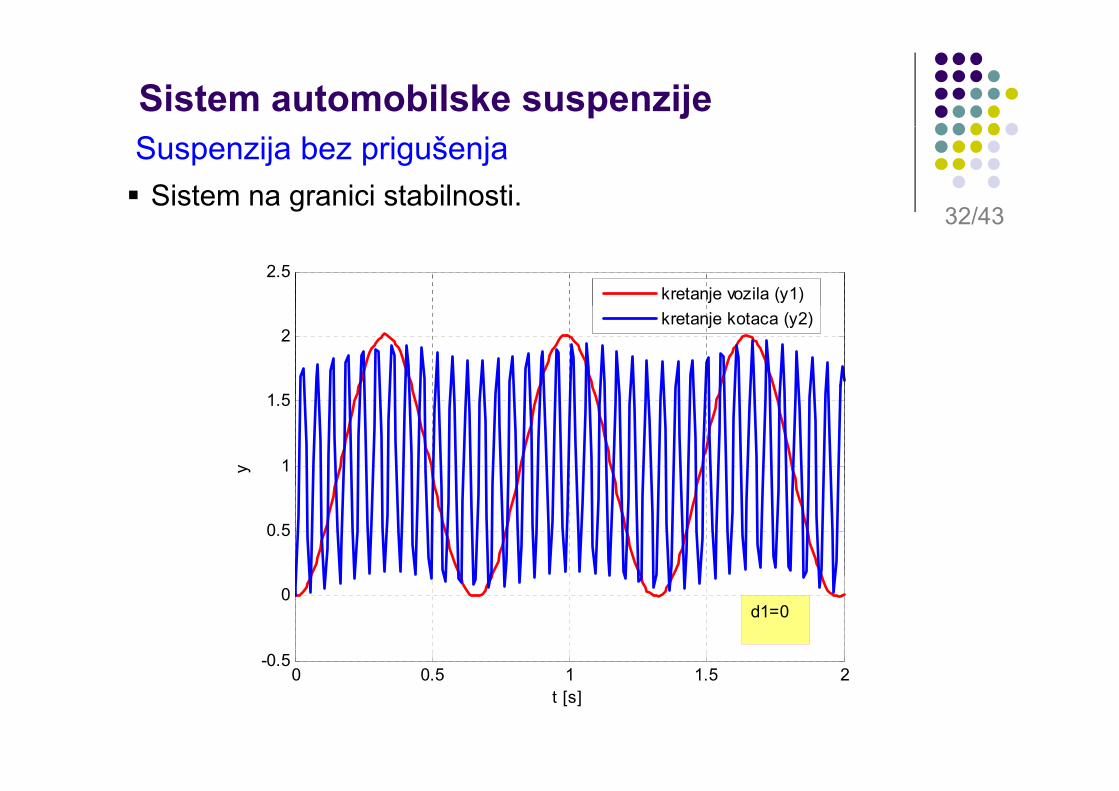
Sistem automobilske suspenzijeSuspenzija bez prigušenjaSistem na granici stabilnosti.
32/43
2.5 kretanje vozila (y1)
32/43
1 5
2kretanje kotaca (y2)
1
1.5
y
0.5
-0.5
0d1=0
0 0.5 1 1.5 20.5
t [s]
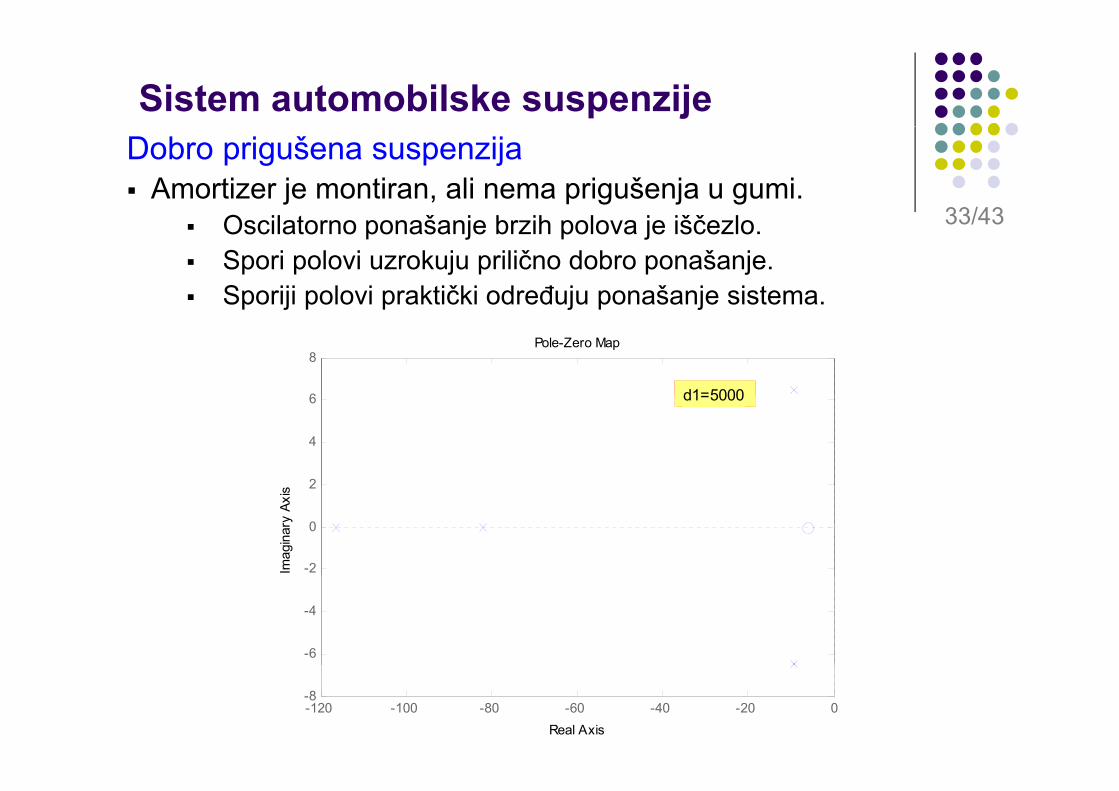
Sistem automobilske suspenzijeDobro prigušena suspenzija
Amortizer je montiran, ali nema prigušenja u gumi.O il t š j b ih l j išč l 33/43Oscilatorno ponašanje brzih polova je iščezlo.Spori polovi uzrokuju prilično dobro ponašanje.Sporiji polovi praktički određuju ponašanje sistema.
33/43
Pole-Zero Map
6
8
d1=5000
p j p p j p j
2
4
6 d1=5000
Imag
inar
y Ax
is
-2
0
2
-6
-4
Real Axis-120 -100 -80 -60 -40 -20 0-8
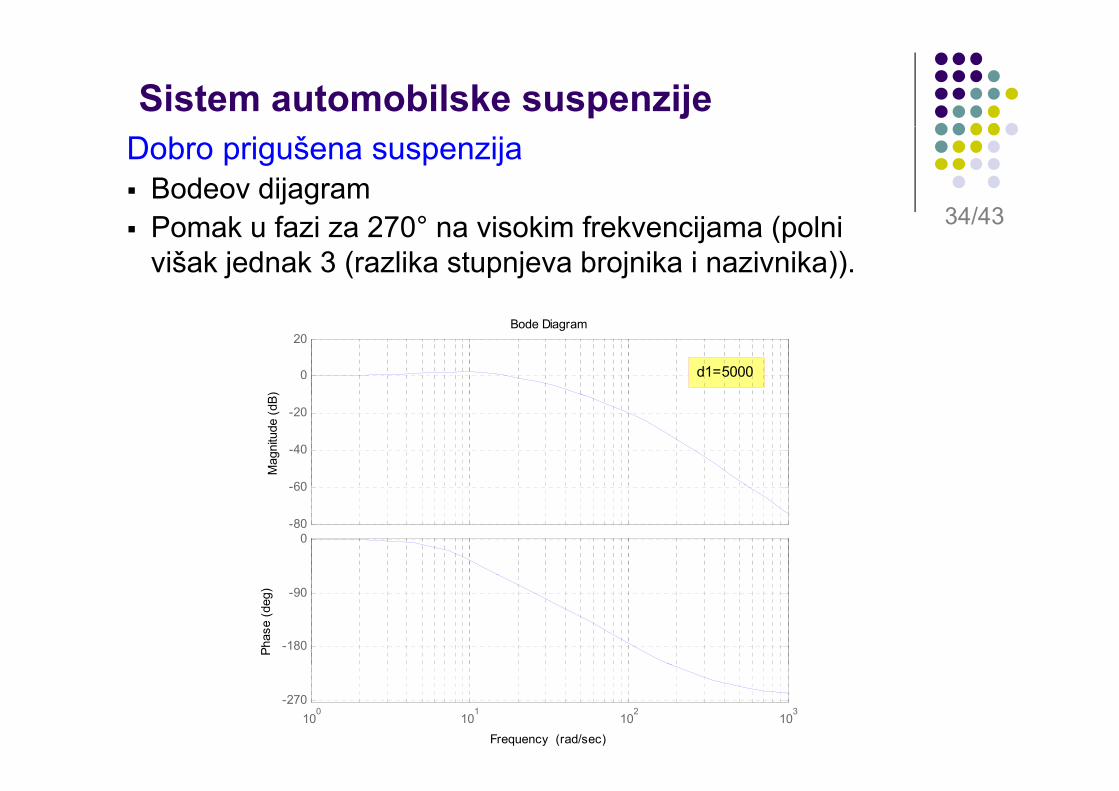
Sistem automobilske suspenzijeDobro prigušena suspenzija
Bodeov dijagramf 2 0° f ( 34/43Pomak u fazi za 270° na visokim frekvencijama (polni
višak jednak 3 (razlika stupnjeva brojnika i nazivnika)).34/43
0
20
)
Bode Diagram
d1=5000
60
-40
-20
Mag
nitu
de (d
B
-80
-60
0
-180
-90
Phas
e (d
eg)
100
101
102
103
-270
Frequency (rad/sec)
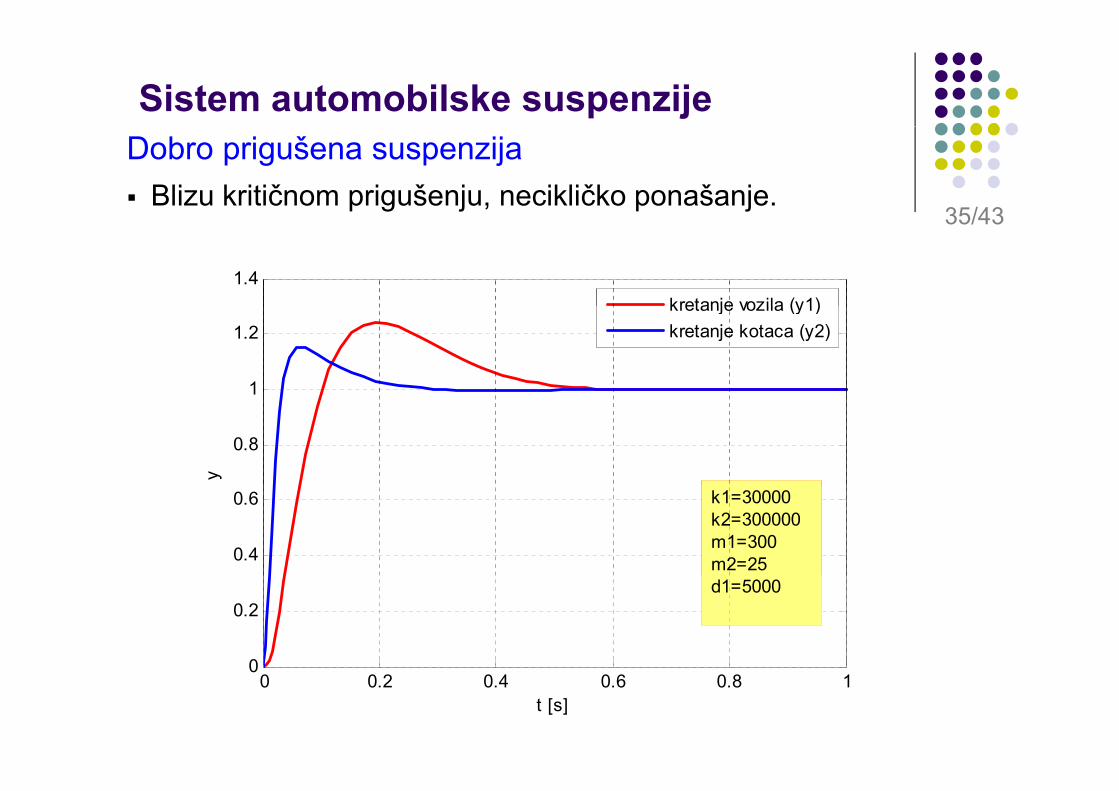
Sistem automobilske suspenzijeDobro prigušena suspenzija
Blizu kritičnom prigušenju, necikličko ponašanje.35/43
1.4 kretanje vozila (y1)
35/43
1
1.2kretanje vozila (y1)kretanje kotaca (y2)
0.8
y
0.4
0.6 k1=30000k2=300000m1=300m2=25
0
0.2d1=5000
0 0.2 0.4 0.6 0.8 10
t [s]
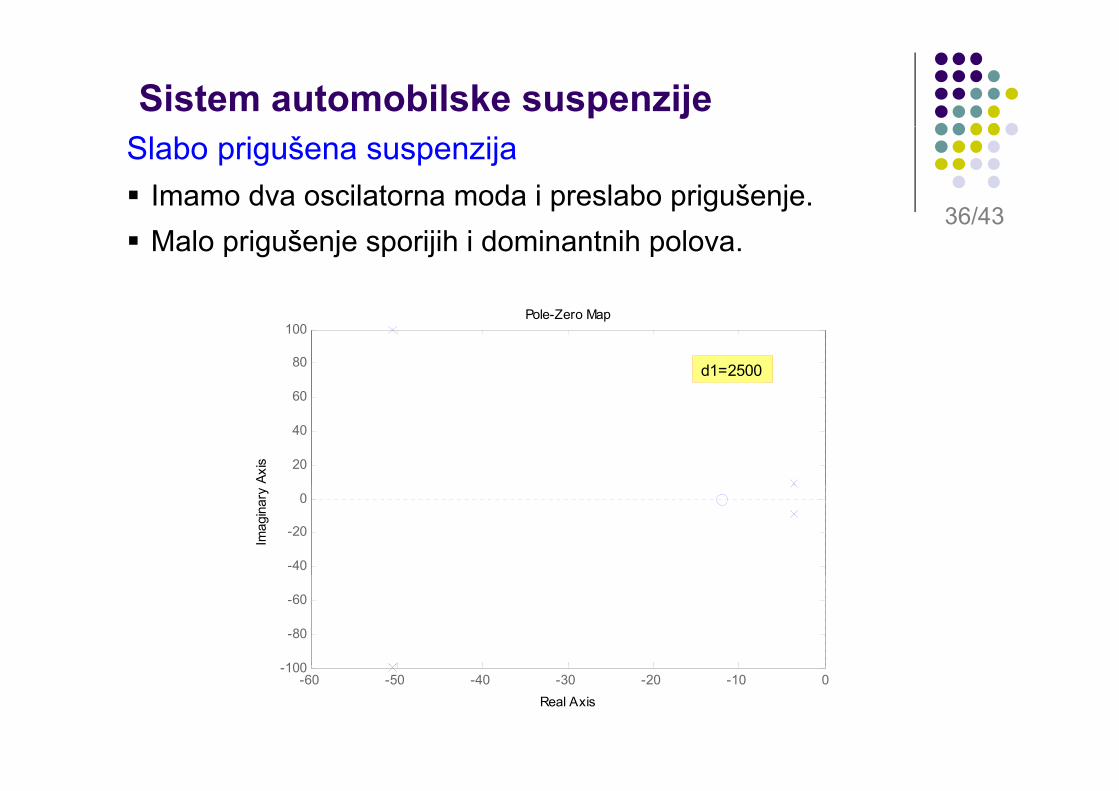
Sistem automobilske suspenzijeSlabo prigušena suspenzija
Imamo dva oscilatorna moda i preslabo prigušenje.36/43
Malo prigušenje sporijih i dominantnih polova.36/43
Pole-Zero Map
60
80
100
d1=2500
Axis 20
40
60
Imag
inar
y
-40
-20
0
100
-80
-60
Real Axis-60 -50 -40 -30 -20 -10 0
-100
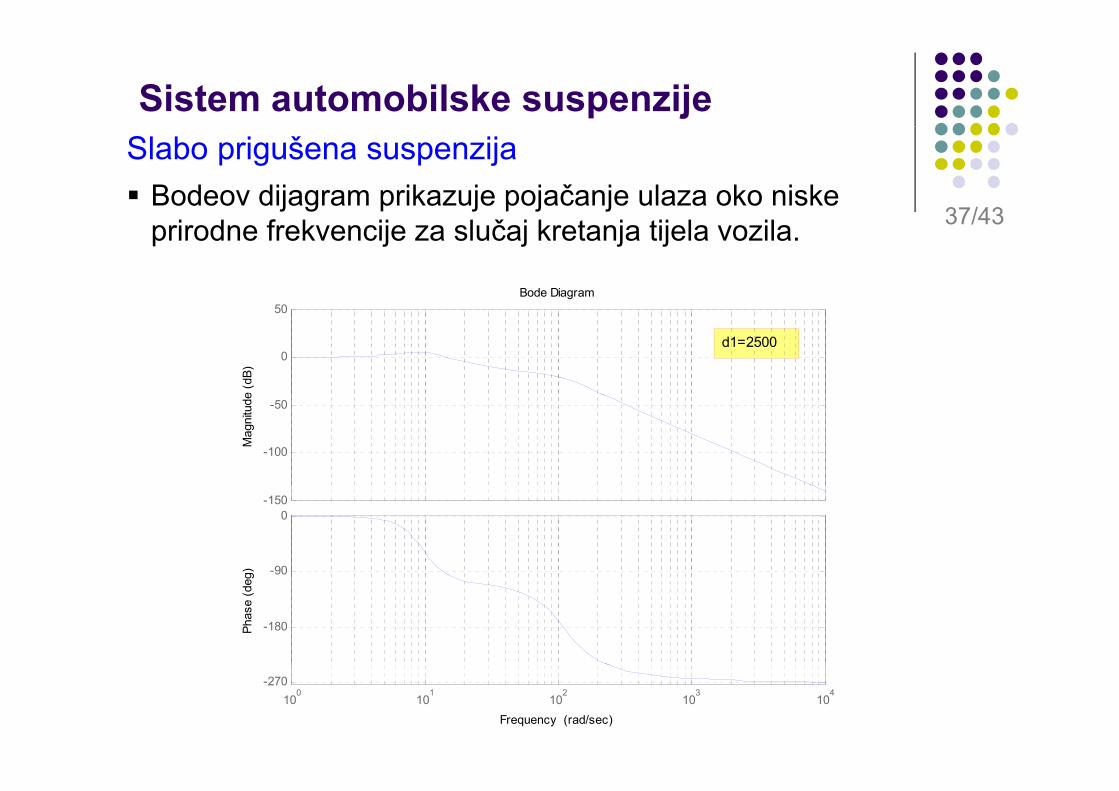
Sistem automobilske suspenzijeSlabo prigušena suspenzija
Bodeov dijagram prikazuje pojačanje ulaza oko niske 37/43
50Bode Diagram
prirodne frekvencije za slučaj kretanja tijela vozila. 37/43
0
50
e (d
B)
d1=2500
-100
-50
Mag
nitu
de
-150
-90
0
g)
-180Phas
e (d
eg
100
101
102
103
104
-270
Frequency (rad/sec)
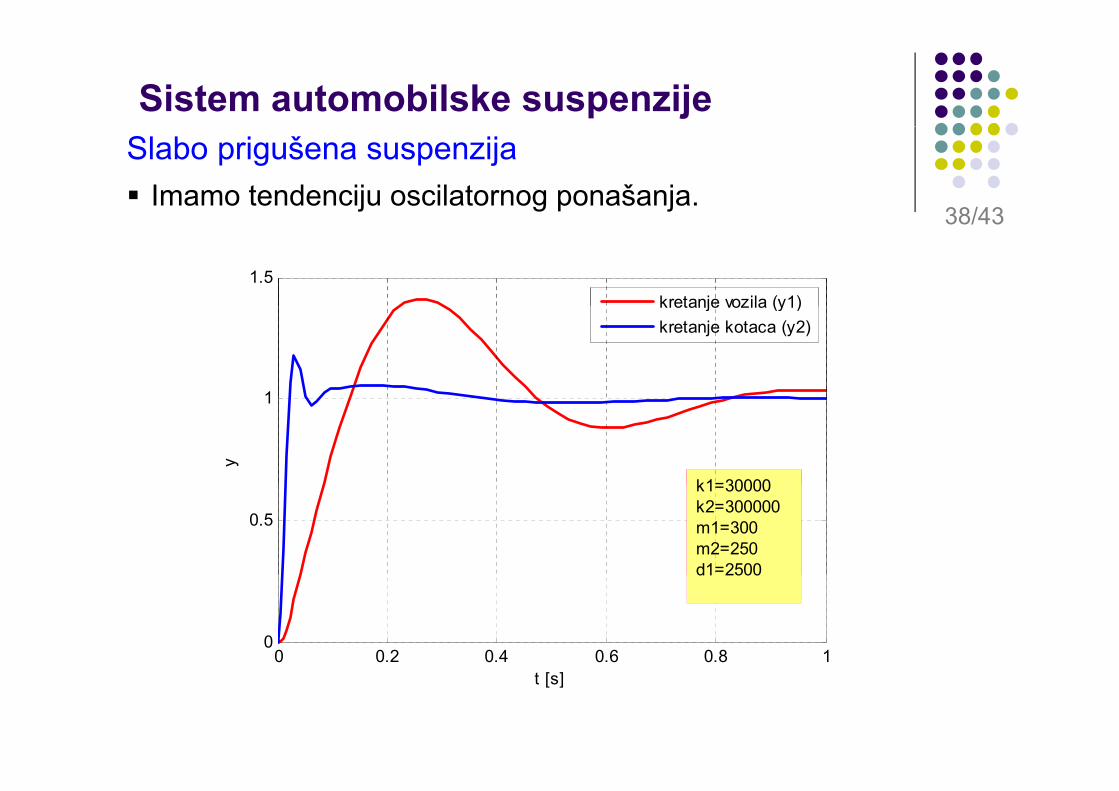
Sistem automobilske suspenzijeSlabo prigušena suspenzija
Imamo tendenciju oscilatornog ponašanja.38/43
1.5 kretanje vozila (y1)
38/43
1
kretanje vozila (y1)kretanje kotaca (y2)
1
y
k1=30000
0.5
k1=30000k2=300000m1=300m2=250d1=2500
0 0.2 0.4 0.6 0.8 10
d1 2500
t [s]
Sistem automobilske suspenzijeInterpretacija matrica
Matrica sistema A definira dinamička svojstva 39/43Matrica sistema A definira dinamička svojstva sistema (ima utjecaj na nazivnik prijenosne funkcije).
39/43
Drugim riječima, matrica A određuje polove sistema.Matrica ulaza B opisuje kako su ulazni signaliMatrica ulaza B opisuje kako su ulazni signali povezani.Matrica B ima utjecaj na brojnik prijenosne funkcije,Matrica B ima utjecaj na brojnik prijenosne funkcije, to jest na nule prijenosne funkcije.Matrica C definira kako su izlazi sistema povezani a ca C de a a o su a s s e a po e a(također ima utjecaja na brojnik prijenosne funkcije).
Sistem automobilske suspenzijeInterpretacija polova
Predstavljaju svojstvene vrijednosti matrice 40/43Predstavljaju svojstvene vrijednosti matrice sistema A.Ili k i l k ij i ik ij
40/43
Ili ekvivalentno korijene nazivnika prijenosne funkcije. Svi polovi su locirani u lijevoj poluravnini s-ravnine, što odgovara stabilnom sistemu. gPol u desnoj poluravnini daje nestabilan sistemsistem. Veća udaljenost od ishodišta, brži sistem.
Sistem automobilske suspenzijeInterpretacija nula
Predstavljaju nule prijenosne funkcije 41/43Predstavljaju nule prijenosne funkcije (odnosno brojnika prijenosne funkcije).D fi i k ji l i i li iš ili j
41/43
Definira koji ulazni signali su više ili manje blokirani od strane sistema.Također poznati pod imenom prijenosni polovi (MIMO sistemi).( )Nula u desnoj poluravnini znači da je inverzna prijenosna funkcija procesa nestabilna Zbogprijenosna funkcija procesa nestabilna. Zbog toga kompletan model slijeđenje (korištenjem inverzije procesa) nije moguće postićiinverzije procesa) nije moguće postići.
Sistem automobilske suspenzijePonašanje kotača
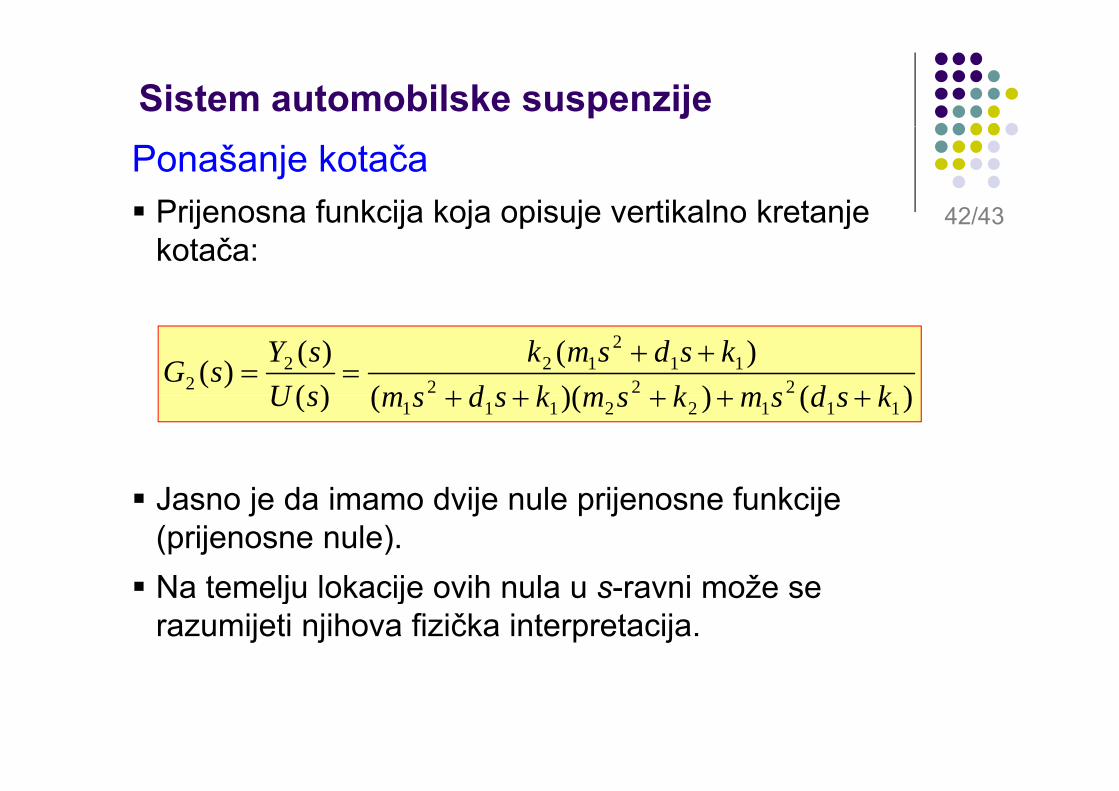
Prijenosna funkcija koja opisuje vertikalno kretanje 42/43Prijenosna funkcija koja opisuje vertikalno kretanje kotača:
42/43
)())(()(
)()()( 222
112
1222 ksdsmksmksdsm
ksdsmksUsYsG
+++++++
==)())(()( 11122111 ksdsmksmksdsmsU +++++
Jasno je da imamo dvije nule prijenosne funkcije (prijenosne nule). N lj l k ij ih l i žNa temelju lokacije ovih nula u s-ravni može se razumijeti njihova fizička interpretacija.
Sistem automobilske suspenzijePonašanje kotača – raspored polova i nula
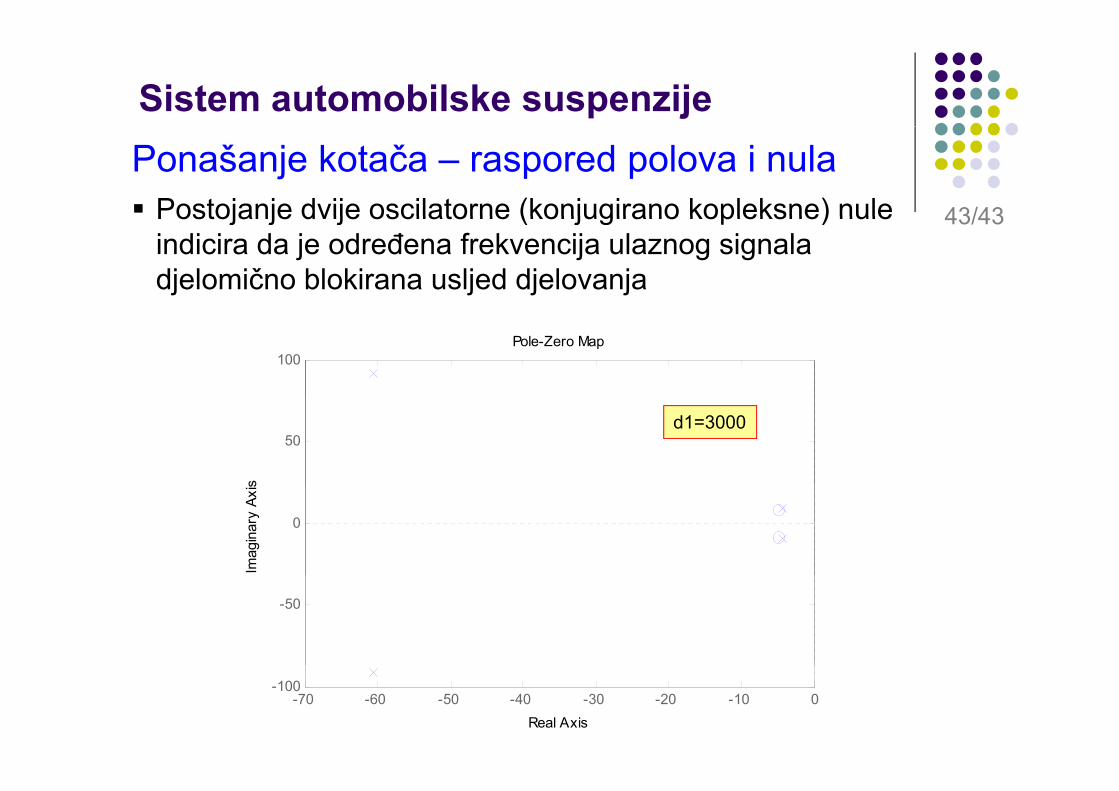
Postojanje dvije oscilatorne (konjugirano kopleksne) nule 43/43Postojanje dvije oscilatorne (konjugirano kopleksne) nule indicira da je određena frekvencija ulaznog signala djelomično blokirana usljed djelovanja
43/43
Pole-Zero Map100
s
50d1=3000
Imag
inar
y Ax
is
0
-50
Real Axis-70 -60 -50 -40 -30 -20 -10 0
-100





























