Embed Size (px)
Citation preview

Lekcija 4: Robusna stabilnost i
analiza performansi
MIMO sistema
Prof.dr.sc. Jasmin Velagić
Elektrotehnički fakultet Sarajevo
Kolegij: Multivarijabilni sistemi
2012/2013

Cilj: prikaz metoda za analizu robusne stabilnosti
i robusne performanse MIMO sistema sa
višestrukim perturbacijama.
Predstavljanje neizvjesnosti složenim perturbacijama
u MIMO sistemu zahtijeva matrice peturbacije (s), koje ćesto imaju restriktivnu strukturu, tj. nisu pune
matrice.
Za analizu navedenih problema koristi se
strukturirana singularna vrijednost () i RS
problem sa strukturiranim perturbacija ne može se
riješiti H analizom.
Fokus je na sintezi “optimalnog” robusnog regulatora,
u smislu minimizacije , korištenjem DK-iteracije.
RP problem može se promatrati kao RS problem sa
strukturiranom neizvjesnošću.
Robusnost sistema i robusna performansa
2/73

1iΔ 1
Δ
Opća upravljačka konfiguracija s neizvjesnošću
Prikaz neizvjesnih perturbacija u blok-dijagonalnoj
matrici:
gdje i predstavlja specifični izvor neizvjesnosti, npr.
ulaznu neizvjesnost.
Ako onda je , što slijedi iz činjenice
da su singularne vrijednosti blok-dijagonalnih matrica
jednake singularnim vrijednostima blokova.
Upravljačka konfiguracija s neizvjesnostima
3/73
i
iΔ
Δ
ΔΔ
1
diag

1iΔ
Konfiguracija za sintezu regulatora K
Blok-dijagonalna matrica (s) uključuje sve moguće
perturbacije (predstavljaju neizvjesnosti) sistema,
normirane tako da je .
Cilj vezan za performanse: minimizirati efekt w na z.
Upravljačka konfiguracija s neizvjesnostima
4/73

N - struktura za analizu RP
N je povezan sa P i K pomoću donje LFT (Linear
Fractional Transformation) od P:
Neizvjesnost funkcije prijenosa od w do z dana je
pomoću gornje LFT od N:
Upravljačka konfiguracija s neizvjesnostima
5/73
21
1
221211 )(),( PKPIKPPKPFN I
12
1
112122 )(),( NΔNIΔNNΔNFF u

M-struktura za analizu RS
Za analizu robusne stabilnosti promatra se samo
struktura na sljedećoj slici.
M = N11 – funkcija prijenosa od izlaza prema ulazu
perturbacija.
Upravljačka konfiguracija s neizvjesnostima
6/73

Sistem sa višestrukim perturbacijama
Upravljačka konfiguracija s neizvjesnostima
7/73
Δ
Reformuliran sistem u N-strukturi

TTvzyuwu ΔΔ i
Primjer 1. Računanje P, N i M matrica.
Promatramo sistem s multiplikativnom ulaznom
neizvjesnošću I. Matrice WI i WP predstavljaju
normiranu težinu za neizvjesnost i težinu
performansi, respektivno.
Potrebno je odrediti generaliziran proces P koji ima
sljedeće ulaze i izlaze:
Upravljačka konfiguracija s neizvjesnostima
8/73

Na temelju prethodne slike slijedi:
Matrica N računa se prema izrazu:
sa:
Upravljačka konfiguracija s neizvjesnostima
9/73
u
w
u
P
GIG
GWWGW
W
v
z
y ΔΔ
PPP
I00
21
1
221211 )(),( PKPIKPPKPFN I
GPIGPGW
WP
WGWP
22211211 , , ,
P
I
PP
00

11NM
),( KPFN I
Slijedi da je matrica N:
Matrica M jednaka je:
Upravljačka konfiguracija s neizvjesnostima
10/73
1
11 )( KGIKGWNM I
11
11
)()(
)()(
GKIWKGIGW
GKIKWKGIKGWN
PP
II

Analiza robusne stabilnosti (RS): sa zadanim
regulatorom K odrediti da li sistem ostaje stabilan
za sve procese u neizvjesnom skupu.
Analiza robusne performanse (RP): ako RS je
zadovoljena, tada odrediti funkciju prijenosa od
ulaza w do izlaza z za sve procese u neizvjesnom
skupu.
Definicije RS i RP
11/73
NS 11 RP
1 ),( RS
NS 1 NP
NS
,,
,
def
def
22
def
def
i
i
stabilan je
stabilan interno je
ΔΔF
ΔΔΔNFF
N
N
u

ii max
Teorem 1. Pretpostavimo da su nominalni sistem
M(s) i perturbacije (s) stabilni. Tada je M-petlja
stabilna ako i samo ako det(I- M(j)) ne
obuhvata ishodište za bilo koje i , tj.
Prema tome, imamo:
gdje je spektralni radijus.
Generalizirani Nyquistov kriterij za RS
12/73
ΔMΔ
ΔMΔ
ΔMΔI
i
Δ
i
, ,1)(
, ,1)(
, ,0)det(
,
kompleksan
i
ΔMΔ , ,1)( RS

Iz gornjeg izraza slijedi da imamo robusnu
stabilnost ako i samo ako je spektralni
radijus od M manji od 1 na svim
frekvencijama i za sve dopuštene
perturbacije .
Glavni problem je testirati uvjet za beskonačan
skup , što je teško proveriti numerički.
Generalizirani Nyquistov kriterij je primjenjiv na
realne i kompleksne perturbacije, na temelju
opće definicije strukturirane singularne
vrijednosti.
Generalizirani Nyquistov kriterij za RS
13/73

Strukturirana neizvjesnost se može modelirati i
poznaju se granice unutar kojih se mogu mijenjati
neizvjesni parametri.
Naprimjer, moguće je imati funkciju prijenosa nekog
procesa, ali neizvjesne lokacije polova, nula ili
pojačanja, odnosno parametara polinoma u
brojniku i nazivniku funkcije prijenosa.
Nestrukturirana neizvjesnost pretpostavlja manje
znanja o procesu.
Naprimjer, postoji samo znanje da frekvencijska
karakteristika procesa leži unutar određenih
granica.
Nestrukturirana neizvjesnost je poznata i pod
imenom dinamička neizvjesnost.
Strukturirana i nestrukturirana neizvjesnost
14/73

1
Δ
Nestrukturirana neizvjesnost se često definira
preko pune kompleksne matrice perturbacija , čije
su dimenzije kompatibilne sa dimenzijama procesa
i gdje je na biloj kojoj frekvenciji (j) zadovoljen
uvjet .
Šest temeljnih oblika nestrukturirane neizvjesnosti
prikazani su na sljedećem slajdu.
Prve tri slike predstavljaju: aditivnu, multiplikativnu
ulaznu i multiplikativnu izlaznu neizvjesnost:
Nestrukturirana neizvjesnost
15/73
OOOOpO
IIIIpI
AAAApA
w
w
w
ΔEGEIG
ΔEEIGG
ΔEEGG
;)( :
);( :
; :

Nestrukturirana neizvjesnost
16/73
Aditivna
neizvjesnost:
model
neizvjesnosti
dodaje se
nominalnom
modelu procesa.
Multiplikativna
neizvjesnost: model
neizvjesnosti u seriji
sa nominalnim
modelom procesa.

Na preostale tri slike prikazane su inverzne forme
prethodne tri neizvjesnosti: inverzna aditivna,
inverzna multiplikativno ulazna i inverzna
multiplikativno izlazna neizvjesnost:
Negativan predznak E-a ne igra neku ulogu budući
da pretpostavljamo da može imati bilo koji
predznak.
označava normiranu perturbaciju i E “stvarnu”
perturbaciju.
Nestrukturirana neizvjesnost
17/73
iOiOiOiOpiO
iIiIiIiIpiI
iAiAiAiApiA
w
w
w
ΔEGEIG
ΔEEIGG
ΔEGEIGG
;)( :
;)( :
;)( :
1
1
1

Ovdje se mogu koristiti skalarne težine w, tako da
imamo E = w = w, ali se ponekad koriste i
matrične težine, tj. E = W2 W1, gdje su W1 i W2 matrične funkcije prijenosa.
Kod SISO sistema obično se grupiraju višestruki
izvori neizvjesnosti u jednu kompleksnu neizvjesnost
(perturbaciju), najčešće u multiplikativnom obliku.
Slično se može uraditi i kod MIMO sistema, s tim da
kod njih postoji razlika u tome da li se radi o
perturbaciji na ulazu ili izlazu.
Skup procesa može se predstaviti
multiplikativnom izlaznom neizvjesnošću sa
skalarnom težinom wO(s) korištenjem izraza:
Nestrukturirana neizvjesnost
18/73
1 ,)( OOOp w ΔGΔIG

Ova multiplikativna neizvjesnost može se izraziti i na
sljedeći način:
Ukoliko je rezultantna težina neizvjesnosti prihvatljiva
(mora biti manja od 1 u promatranom frekvencijskom
području) i provedena analiza pokazala da su robusna
stabilnosti i robusna performansa postignute, tada je
grupiranje neizvjesnosti na izlazu opravdano.
U suprotnom ide se na grupiranje neizvjesnosti na
ulazu, tzv. multiplikativna ulazna neizvjesnost:
Nestrukturirana neizvjesnost
19/73
),()( ));()((max)( 1
OOpO ljwjlp
GG-GG
1 ),( IIIp w ΔΔIGG
),()( ));)(((max)( 1
IIpI ljwjlp
GGGG

Primjer 2. Kombiniranje multiplikativnih perturbacija
(M-struktura sistem sa multiplikativnim ulaznim i
izlaznim neizvjesnostima).
Skup mogućih procesa dan je sa:
gdje je .
Nestrukturirana neizvjesnost
20/73
)()( 1212 IIIOOOp WΔWIGWΔWIG
1 1 OI ΔΔ i

Grupiranjem neizvjesnosti u matricu:
i predstavljanjem sistema sa prethodnog slajda u
M-strukturu dobiva se:
Dovoljan uvjet za RS je ,, ali se traži da
bude strukturirana.
Nestrukturirana neizvjesnost
21/73
O
I
Δ
ΔΔ
0
0
1M
O
II
O
I
2
2
1
1
W
W
TSG
KST
W
WM
0
0
0
0

1
Δ
Teorem2 . Robusna stabilnost za nestrukturirane
perturbacije. Pretpostavimo da je nominalni sistem
M(s) stabilan (NS) i da su perturbacije (s) stabilne.
M sistem je stabilan za sve perturbacije koje
ispunjavaju uvjet (odnosno imamo RS) ako
i samo ako je:
Dokaz: Uvijek se može odabrati puna matrica
takva da je :
SVD od M daje M = UVH,
odabrati da se dobije M= UUH
(M ) = (UUH) = ( ) =
RS za nestrukturirane neizvjesnosti
22/73
1 ,1)( , ,1)( RS
MMΔMΔ
)( )( MMΔ
HVUΔ )1)(( Δ
)(M

1
IΔ Primjer 3. Pretpostavimo da je I(s) puna matrica
sa , tada vrijedi (za sistem sa slajda 8.):
Rezultat sličan sa SISO sistemima samo što je kod
MIMO sistema TI = T.
Ali, dopušta se da puna matrica može biti visoko
konzervativna, tj.:
Neovisna ulazna neizvjesnost: I dijagonalna
matrica,
Kombiniranje izvora neizvjesnosti: blok-
dijagonalna matrica.
RS za nestrukturirane neizvjesnosti
23/73
III TWKGIKGWMM
1)( ;1 RS

Primjena nestrukturiranih RS uvjeta
Predstavljanje nužnih i dovoljnih uvjeta za RS za
svaku od šest ranije prikazanih nestrukturnih
perturbacija sa:
Određivanje matrice M: izolacija perturbacije i
određivanje matrice funkcije prijenosa:
od izlaza do ulazu perturbacije, gdje je M0 za svaki
od šest slučajeva dan na sljedećem slajdu.
RS za nestrukturirane neizvjesnosti
24/73
1 ,12
ΔΔWWE
201 WMWM

Tipovi nestrukturiranih neizvjesnosti:
Teorem za RS za nestrukturirane neizvjesnosti daje:
RS za nestrukturirane neizvjesnosti
25/73
SGKIMGEIG
SKGIMEIGG
SGGGKIMGEIG
TGKIGKM GEIG
TGGKIKMEIGG
KSGKIKMEGG
1
0
1
1
0
1
1
0
1
1
0
1
0
1
0
)( :)(
)( :)(
)( :)(
)( :)(
)( : )(
)( :
iOp
IiIp
iAp
Op
IIp
Ap
,1)( RS 201 jWMW

Promatrajmo strukturiranu neizvjesnost = diag{i}.
Testiranje RS za sistem sa M - strukturom:
RS za strukturiranu neizvjesnost
26/73
,1))(( RS jMako

Osnovna ideja: učiniti stabilnost neovisnom o
skaliranju.
Da bi se osigurala neovisnost stabilnosti o skaliranju
uvodi se blok-dijagonalna matrica skaliranja:
gdje je di skalar i Ii matrica identiteta (jedinična
matrica) istih dimenzija kao blok i matrice
perturbacije.
Dodavanje D i D-1 na obje strane M-a nema
utjecaja na stabilnost.
Uvjet RS sada glasi:
RS za strukturiranu neizvjesnost
27/73
iid ID diag
,1)( RS 1DMDako

Poboljšanje se dobiva minimiziranjem izraza na
svim frekvencijama:
gdje je skup svih blok-dijagonalnih matrica čija
struktura je kompatibilna sa strukturom matrice
neizvjesnosti , tj. D = D.
RS za strukturiranu neizvjesnost
28/73
,1))()()((min RS 1
)(DMD
Djako

)(min 1DMDD
Prethodni izraz za RS uvjet motiviran je uvođenjem
strukturirane singularne vrijednosti , gdje imamo:
Općenito, za kompleksne perturbacije izražene blok-
dijagonalnim matricama imamo da je (M) veoma
blizu .
Strukturirana singularna vrijednost je funkcija koja
daje generalizaciju singularne vrijednosti .
se koristi za dobivanje nužnih i dovoljnih uvjeta za
RS i RP.
Postavlja se pitanje kako definirati singularnu
strukturiranu vrijednost?
Strukturirana singularna vrijednost
29/73
)(min)( 1
)(
DMDM
D

)(1)( MM
Polazi se od generaliziranog Nyquistovog kriterija za
M - strukturu: traži se najmanja strukturirana
neizvjesnost takva da je det(I - M) = 0.
Strukturirana singularna vrijednost (M) definira se
preko inverzije perturbacije:
Definirana je za konstantne kompleksne matrice,
npr. na zadanoj frekvenciji.
(M) ovisio o M i o strukturi , često se piše (M).
Sa punom matricom (nestrukturirana matrica)
najmanja perturbacija, koja daje singularitet od I –
M, ima , iz čega slijedi
Strukturirana singularna vrijednost
30/73
0)det(|)(min)(def
1 MΔIΔM
Δ
)()( MM

)(1)( MM
Gornji izraz slijedi iz
Kada se koristi ponavljajuća dijagonalna matrica
= I, tada najmanja perturbacija ima
iz čega slijedi:
Općenito vrijedi:
U sljedećem primjeru demonstrira se kako ovisi o
strukturi perturbacije (da li je puna ili dijagonalna
matrica).
Strukturirana singularna vrijednost
31/73
)()( MM
HuvMΔ )(1
)()()( MMM

316.0162.3/1)(1)( MΔ
Primjer 4. Puna matrica (nestrukturirana).
Neka je:
Perturbacija:
Sa det(I - M) = 0.
(M) = 3.162 kada je puna matrica.
Strukturirana singularna vrijednost
32/73
H
707.0707.0
707.0707.0
00
0162.3
894.0447.0
447.0894.0
11
22M
100.0200.0
100.0200.0447.0894.0
707.0
707.0
162.3
1111
HuvΔ

.333.0)( Δ
Navedeno vrijedi kada je puna matrica.
Ukoliko se načini restrikcija na da bude
dijagonalna matrica tada je potrebna veća
perturbacija da se dobije det(I - M) = 0.
Ako je dijagonalna perturbacija, odnosno
strukturirana, tada za matricu M najmanja
dijagonalna matrica kojom se dobiva det(I - M)
= 0 iznosi:
gdje je
(M) = 3 kada je dijagonalna matrica.
Strukturirana singularna vrijednost
33/73
10
01
3
1Δ

Velika vrijednost nije dobar izbor, što znači da
mala perturbacija dovodi do toga da I - M bude
singularna.
Manja vrijednost je dobar izbor.
(M) omogućuje generalizaciju spektralnog radijusa
(M) i spektralne norme .
Sekvenca M i u definiciji nije važna, što slijedi iz
identiteta:
Kada je km = 0 dobiva se matrica I - kmM koja nije
singularna.
Strukturirana singularna vrijednost
34/73
)det()det( ΔMIMΔI mm kk

obično nije moguće direktno izračunati, računanje
je zasnovano na donjim i gornjim granicama.
Najviše korištena gornja granica je:
Problem konveksne optimizacije.
Strukturirana singularna vrijednost
35/73
)(min)( 1
)(
DMDM
D

Promatra se M - struktura kada je skup norma-
ograničenih blok-dijagonalnih perturbacija.
Na temelju teorema sa slajda 12. dobiva se:
Ovo predstavlja “da/ne” uvjet.
Da bi se pronašao km koji čini sistem robusno
stabilnim potrebno je skalirati neizvjesnost sa km i
izračunati najmanji km koji zadovoljava uvjet:
Korištenjem definicije singularne strukturirane
vrijednosti ova vrijednost je km =1/(M).
RS sa strukturiranom neizvjesnošću
36/73
1))(( ,, ,0))()(det( RS jjj ΔΔΔMI
0)det( MΔI mk

Nužni i dovoljni uvjeti za robusnu stabilnost
Teorem 3. RS za blok-dijagonalne perturbacije
(realne ili kompleksne). Pretpostavimo da su
nominalni model M i perturbacije stabilni. Slijedi
da je M - sistem stabilan za sve dostupne
perturbacije sa ako i samo ako je:
Uvjet za RS za MIMO sistem glasi:
koji se može interpretirati kao generalizirani teorem
malog pojačanja koji uzima u obzir strukturu .
RS sa strukturiranom neizvjesnošću
37/73
,1))(())(( RS jj ΔM
,1))(( jM
,1)(Δ

Primjer 4. RS sa dijagonalnom ulaznom
neizvjesnošću. Razmatra se robusna stabilnost
sistema na slici.
Nominalni proces i regulator (PI regulator
destilacijskog procesa) dani su sa:
RS sa strukturiranom neizvjesnošću
38/73
075.00
00015.01)( ;
4.12.108
4.18.87
1
1)(
s
ss
ss
KG

Regulator rezultira nominalno stabilnim sistemom sa
prihvatljivim performansama.
Pretpostavimo da postoji kompleksna multiplikativna
neizvjesnost na svakom manipulativnom ulazu
amplitude:
Svođenjem sistema na M - strukturu dobiva se:
i RS uvjet (M) < 1 u teoremu za RS daje:
RS sa strukturiranom neizvjesnošću
39/73
15.0
2.0)(
s
sswI
III ww TKGIKGM 1)(
2
1 , ,
)(
1)( RS
I
I
IjwI
ΔTΔ

,1)( II wI
TΔ
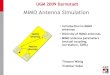
Ovaj uvjet je grafički ilustriran na slici.
RS za dijagonalnu ulaznu neizvjesnost je zagarantirana
jer je na širokom frekvencijskom
opsegu. Sistem će biti nestabilan za punu blokovsku
ulaznu neizvjesnost (i je puna matrica).
RS sa strukturiranom neizvjesnošću
40/73
Bodeov dijagram
Frekvencija (rad/s)
10-3
10-2
10-1
100
101
102
-60
-50
-40
-30
-20
-10
0
10
20
30
40
Am
plit
uda (
dB
)

001
001
100
010
a
a
a
a
DC
BA
10 ;)1(
)1(1)(
2
2
22
a
assa
saas
assG
Primjer 5. RS satelita. Upravljanje ugaonom
brzinom satelita oko jedne od osi, gdje je njegova
funkcija prijenosa:
Minimalan prikaz u prostoru stanja G = C(sI-A)-1B+D:
RS sa strukturiranom neizvjesnošću
41/73

1
1
1
1)()( 1
a
a
ss GKIGKT
IK
Polovi su s = ja. Za stabilizaciju vrijedi:
Nominalna stabilnost (NS). Dva pola zatvorene petlje u
s = -1 i:
RS sa strukturiranom neizvjesnošću
42/73
10
01
1
1
0
0
a
a
a
acl BKCAA

,1)(L
Nominalna performansa (NP). Analiza dobivenih
rezultata (singularne vrijednosti).
, oskudne performanse u pravcu malog
pojačanja.
g12, g21 veliki jaka interakcija.
RS sa strukturiranom neizvjesnošću
43/73

Robusna stabilnost (RS).
Analiza odziva (T) kao funkcije frekvencije.
(T) siječe 1 oko 10 rad/s može se tolerirati više od 100%
neizvjesnosti na frekvencijama iznad 10 rad/s.
Na niskim frekvencijama, (T) 10 i može garantirati RS sa
tolerancijom do najviše 10% neizvjesnosti (kompleksne).
RS sa strukturiranom neizvjesnošću
44/73 Bode Diagram
Frekvencija (rad/s)
10-2
10-1
100
101
102
-30
-20
-10
0
10
20
30
Am
plit
uda (
dB
)

Ovo potvrđuje rezultate iz lekcije 1. gdje je pokazano
da realne perturbacije 1=0.1 i 2 = -0.1 dovode do
nestabilnosti procesa.
Korištenje kompleksne umjesto realne perturbacije
nije konzervativno u ovom slučaju, najmanje za
dijagonalnu i.
Međutim, za ponavljajuću skalarnu perturbaciju
(tj. neizvjesnost identična za svaki kanal) postoji
razlika između realne i kompleksne perturbacije.
Kod ponavljajuće realne perturbacije dobiva se
vršna vrijednost = 1, tako da se mogu tolerirati
perturbacije 1 = 2 amplitude 1 prije postizanja
nestabilnosti (ovo je potvrđeno u primjeru u lekciji 1.
razmatrajući karakteristični polinom iz koga je za
1 = 2 = -1 postignuta nestabilnost procesa).
RS sa strukturiranom neizvjesnošću
45/73

Sa kompleksnom ponavljajućom perturbacijom
imamo (T) = (T) = 10 na niskom frekvencijama,
tako da se nestabilnost može pojaviti sa
kompleksnim 1 = 2 amplitude 0.1.
U primjeru iz lekcije 1. može se vidjeti da konstantna
perturbacija 1 = 2 = j0.1 uzrokuje nestabilnost.
RS sa strukturiranom neizvjesnošću
46/73

Robusna performansa (RP) znači da je ciljna
performansa zadovoljena za sve moguće procese u
neizvjesnom skupu, čak i za najlošiji proces.
U lekciji 3. smo vidjeli da za SISO sistem sa H
ciljnom performansom, RP uvjet je identičan RS
uvjetu sa dodatnim perturbacijskim blokom.
Robusna performansa (RP)
47/73
w
uN
z
y
wΔNFz ),(

Pretpostavimo pravilno skaliranje tako da je
performansa cilja:
Ovo odgovara uvjetu stabilnosti za Mp - strukturu
sa M = F(N, ) i p je puna kompleksna matrica
perturbacija istih dimenzija kao FT.
Robusna performansa (RP)
48/73
,1),( ,1max
2
2 ΔΔNFw
z
w

Teorem 4. Robusna performansa (RP).
Preformulirajmo neizvjestan sistem u N - strukturu
(slika na sljedećem slajdu). Pretpostavimo
nominalnu stabilnost tako da je N (interno) stabilan.
Tada je:
gdje je računat s obzirom na strukturu:
Robusna performansa (RP)
49/73
,1))((
1 1,),( RP
ˆ
def
j
u
N
ΔΔNFF
Δ
pΔ
ΔΔ
0
0ˆ

Robusna performansa (RP)
50/73
RP kao specijalan
slučaj strukturirane
RS.
Dokaz teorema robusne
performanse korištenjem
blokovskog dijagrama.
Algebarski dokaz ovog
teorema – korištenje
Schur-ove formule.

1
F
1
Δ
Preformulirajmo neizvjestan sistem u N - strukturu
gdje blok-dijagonalne perturbacije zadovoljavaju
uvjet . Uvedimo:
i neka je zahtjev za performanse (RP) vrijedi
za sve dostupne perturbacije. Tada imamo:
Sumarno o uvjetima za NP, RS i RP
51/73
NS , ˆ , ,1)( RP
NS , ,1)( RS
NS , ,1)( NP
NS
ˆ
22
22
i
i
i
(interno) stabilna
p
p
Δ
ΔΔN
N
N
N
Δ
Δ
Δ
0
0
21
1
112122 )(),( NΔNIΔNNΔNFF u

ppPw GKGI
,1)( RP 1def
Ispitivanje robusne performanse sistema sa ulaznom
neizvjesnošću.
Zahtjev na performanse je:
Primjena: RP sa ulaznom neizvjesnošću
52/73

1 ),( IIIp w ΔΔIGG
Razmatrani skup procesa:
gdje su wP(s) i wI(s) skalarne težine, tako da je ciljna
performansa ista za sve izlaze, a neizvjesnost je
jednaka za sve ulaze.
Najčešće se pretpostavlja da je I dijagonalna matrica,
ali ćemo također razmatrati slučaj kada je I puna
matrica.
Ovaj problem je odličan za ilustraciju analize
robusnosti neizvjesnih multivarijabilnih (MIMO)
sistema.
Primjena: RP sa ulaznom neizvjesnošću
53/73

U nastavku se razmatra sljedeće:
Pronalaženje međupovezne matrice N za ovaj
problem.
Razmatranje SISO slučaja, tako da se korisne veze
mogu načiniti na temelju rezultata iz prethodnog
dijela predavanja.
Analiza MIMO destilacijskog procesa sa
raspregnutim regulatorom osjetljivim na male
pogreška ulaznih pojačanja. Također će se naći
koji je za RP mnogo veći od 1, za slučaj
raspregnutog regulatora.
Pronaći granice za za ovaj problem i diskutirati o
ulozi kondicionog broja.
Načiniti komparaciju sa slučajem kod koga je
neizvjesnost locirana na izlazu.
Primjena: RP sa ulaznom neizvjesnošću
54/73

Međupovezna matrica
Iz prethodne slike slijedi:
gdje su: TI = KG(I+KG)-1 i S = (I+GK)-1, zbog
jednostavnosti je izostavljen predznak (-) u blokovima
(1,1) i (1,2) matrice N, budući da je (N) = (UN) sa
unitarnom matricom U:
Za zadani regulator u nastavku se testira NS, NP, RS i
RP, pri čemu I može biti puna ili dijagonalna matrica.
Primjena: RP sa ulaznom neizvjesnošću
55/73
SSG
KSTN
PP
III
ww
ww
I
IU
0
0

RP sa ulaznom neizvjesnošću za SISO sistem
Za SISO sistem uvjeti sa slajda br. 50 i prethodni
izraz za N postaju:
Uvjet za RP slijedi iz:
Primjena: RP sa ulaznom neizvjesnošću
56/73
,1 RP
,1 RS
,1 NP
,, NS
IIP
II
P
I
TwSw
Tw
Sw
TKSSGS stabilne i
STSS
TT
SSG
KSTN PII
PP
IIII
PP
IIIww
ww
ww
ww
ww
)(

1)(7.0
)( ;6.1092.108
4.868.87
175
1)(
s
ss
ss GKG
RP za 2x2 destilacijski proces
Promatra se ranije opisani destilacijski proces
(lekcija 1.) sa regulatorom (IB – inverse-based
controller):
Regulator osigurava nominalno rasprezanje sistema
sa:
gdje su:
Primjena: RP sa ulaznom neizvjesnošću
57/73
ITISIL tl , ,
143.1
1
7.0
7.01
7.01
1
7.0
sst
s
s
l,
sl

Koristimo za nominalnu osjetljivost u svakoj petlji.
U primjeru destilacijskog procesa iz prve lekcije,
regulator je dao odličan nominalni odziv, ali je odziv sa
20% neizvjesnosti pojačanja u svakom ulaznom
kanalu jako slab.
Ove rezultate ćemo sada provjeriti korištenjem -
analize.
Izbor težina za neizvjesnost i performanse:
Težinom neizvjesnosti wI(s) može se aproksimativno
predstaviti 20% pogreške pojačanja i zanemarenog
vremena kašnjenje od 0.9 minuta.
Primjena: RP sa ulaznom neizvjesnošću
58/73
s
ssw
as
ssw PI
05.02/)( ;
5.0
2.0)(

Težina performansi wP(s) specificira integralno
djelovanje, propusni opseg zatvorene petlje oko 0.05
[rad/min], i maksimalnu vršnu vrijednost od
Ms = 2.
Grafički prikaz destilacijskog procesa sa
raspregnutim regulatorom.
Primjena: RP sa ulaznom neizvjesnošću
59/73 )(S
10-3
10-2
10-1
100
101
102
103
0
1
2
3
4
5
6
RSNP
RP

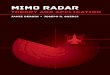
Sumarni rezultati:
NS. Da.
NP. Sa raspregnutim regulatorom imamo:
(krivulja prikazane kombinacijom isprekidanih linija i
tačaka na prethodnoj slici, NP je OK).
Budući da je wITI = wIT skalarna matrica identiteta,
imamo neovisno o strukturi I:
i sa prethodne slike slijedi da je RS OK.
RP. Slaba.
Primjena: RP sa ulaznom neizvjesnošću
60/73
7.0
05.05.0/)()( 22
s
swP SN
)143.1)(15.0(
152.0)(
ss
stww IIII
TΔ

Strukturirana singularna vrijednost predstavlja
veoma efikasan alat za analizu RP sa zadanim
regulatorom.
Traži se regulator K koji minimizira zadani uvjet -
problem -sinteze (minK(N)).
Trenutno nema direktne metode za sintezu
optimalnog regulatora.
Za kompleksne perturbacije postoji metoda poznata
pod imenom DK-iteracija.
DK-iteracija kombinira H sintezu i analizu, te često
daje veoma dobre rezultate.
Polazna tačka je gornja granica na izražena preko
skalirane singularne vrijednosti:
-sinteza i DK-iteracija
61/73
)(min)( 1
DNDN
D

Strukturirana singularna vrijednost za kompleksne
perturbacije je ograničena sa:
gdje:
Ako se promatra matrica D koja je u vezi s matricom
, to jest D = D, tada je:
Problem konveksne optimizacije po D (postoji samo
jedan globalni minimum):
-sinteza i DK-iteracija
62/73
)()()( MMM
)()(:) ( MMIΔ skalar kompleksan je
)()(: MMΔ matrica kompleksna puna je
)()( )()( 1MDMDMDDM
i
)(min)( 1
DMDD
D

Glavna ideja -sinteze i DK-iteracije je pronaći
regulator koji će minimizirati vršnu vrijednost na
frekvencijskom opsegu navedene gornje granice:
s obzirom na K ili D.
Za startanje iteracija potrebno je prvo odabrati
inicijalnu racionalnu funkciju prijenosa D(s) odgovarajuće strukture – često je dobar izbor
jedinična matrica.
Algoritam DK-iteracije objašnjen je na sljedećem
slajdu.
-sinteza i DK-iteracija
63/73
))(min(min 1
DKDN
DK

1)( 1
DKDN
DK-iteracija
1. K-korak. Sinteza H regulatora za skalirani problem,
za fiksni D(s).
2. D-korak. Naći D(j) za minimizaciju
na svim frekvencijama sa fiksnim N.
3. Podesiti amplitudu svakog elementa od D(j) da bi
se postigla stabilna i minimalno fazna funkcija
prijenosa D(s) i ići ponovo na korak 1.
Iteracija se može nastaviti dok se ne postigne
zadovoljavajuća performansa, , ili
dok se H norma dugo vremena ne smanjuje.
-sinteza i DK-iteracija
64/73
1)(min DKDNK
))(( 1 jDND

)(ˆ NΔ
Primjer 6. -sinteza sa DK-iteracijom. Zadan je
pojednostavljen destilacijski proces:
Težina neizvjesnosti wII i težina performansi wPI dane se sljedećim izrazima:
Cilj je minimizirati vršnu vrijednost od , gdje je
N dan sa:
-sinteza i DK-iteracija
65/73
6.1092.108
4.868.87
175
1)(
ssG
s
ssw
as
ssw PI
05.02/)( ;
5.0
2.0)(
SSG
KSTN
PP
III
ww
ww

Matrica .
U primjeru se razmatra dijagonalna ulazna
neizvjesnost (koja je uvijek prisutna u bilo kojem
realnom problemu), tako da je I dijagonalna matrica
dimenzija (2 x 2).
Matrica P je puna matrica dimenzija (2 x 2) i
predstavlja specifikacije performansi.
Ovdje imamo samo tri bloka matrice kompleksnih
neizvjesnosti, tako da je (N) jednaka gornjoj granici:
u ovom slučaju.
-sinteza i DK-iteracija
66/73
},{diagˆPI ΔΔΔ
)(min 1DNDD

Odzivi težina neizvjesnosti i performansi
U odzivu postoji frekvencijsko područje (otvor) u
kome obje težine imaju amplitudu manju od jedinice.
-sinteza i DK-iteracija
67/73
10-7
10-6
10-5
10-4
10-3
10-2
10-1
100
101
102
-20
0
20
40
60
80
100
WP
WI
Am
plit
uda (
dB
)
Bode Diagram
Frekvencija (rad/s)

Prvo se konstruira generalizirani proces P:
Nakon toga se definira blokovska struktura koja se
sastoji od: (11) blokova za prikaz I i (22) blokova
za prikaz P.
Matrica skaliranja D za DND-1 ima oblik
D = diag{d1, d2, d3I2}, gdje je I2 jedinična matrica
(22) i možemo postaviti d3 = 1.
Zatim se matrica P skalira sa diag{D, I2}, gdje je
matrica I2 povezana sa ulazima i izlazima regulatora.
-sinteza i DK-iteracija
68/73
GIG
GWWGW
W
P PPP
I00

Iteracija 1.
Korak 1. Sa inicijalnim skaliranjem, D0 = I, H
algoritam generira regulator sa 6 stanja (2 stanja iz
modela procesa, 2 stanja iz svake od težina) sa H
od = 1.1823.
Korak 2. Gornja -granica daje -krivulju prikazanu
na prvoj sljedećoj slici i označenu sa “Iter. 1”, kojoj
odgovara vršna vrijednost = 1.1818.
Korak 3. Frekvencijski ovisni članovi d1() i d2() ugađaju se funkcijama prijenosa 4-tog reda.
d1() i njegova ugađana (fitovana) funkcija prijenosa
predočene su na drugoj slici i označene sa “Iter. 1”
(tačkasta krivulja na drugoj slici predstavlja ugađanu
funkciju).
-sinteza i DK-iteracija
69/73

0238.1)( 111
DND
Iteracija 2. Korak 1. Sa 8 stanja skalirajuće matrice
D1(s), H algoritam generira regulator sa 22 stanja i
normom
Korak 2. Ovaj regulator daje vršnu vrijednost od jednaku 1.0238.
Korak 3. Rezultantna skalirajuća matrica D2 se
lagano mijenja u odnosu na prethodnu iteraciju, što
se može vidjeti na drugoj slici označeno sa “Iter. 2”.
Iteracija 3. Korak 1. Sa skalirajućom matricom D2(s),
H norma se lagano mijenja sa 1.024 na 1.019.
Budući da su poboljšanja u odnosu na prethodnu
iteraciju mala i singularna vrijednost je veoma blizu
jedinice, pa se zaustavljaju daljnje iteracije.
Prema tome rezultantni regulator K3 ima 22 stanja sa
vršnom vrijednošću od = 1.019.
-sinteza i DK-iteracija
70/73

Promjena u DK-iteraciji
-sinteza i DK-iteracija
71/73

Promjena d1 u DK-iteraciji
-sinteza i DK-iteracija
72/73

Finalne krivulje za NP, RS i RP sa regulatorom K3
prikazane su ne sljedećoj slici.
Ciljevi postavljeni na NP i RS su jednostavno
zadovoljeni. Vršna vrijednost = 1.019 je veoma blizu
1, tako da su specifikacije performansi
gotovo zadovoljene za sve moguće procese.
-sinteza i DK-iteracija
73/73
1)( SPPw