Embed Size (px)
Citation preview

Volume 20, Number 3, 2012
LIGHT & ENGINEERING
Znack Publishing House, Moscow
ISSN 0236-2945

Editor-in-Chief: Julian B. Aizenberg
Associate editor: Sergey G. Ashurkov
Editorial Board: Lyudmila V. Abramova Leonid B. PrikupetsArtyom E. Ataev Vladimir M. PyatigorskyVictor V. Barmin Anna G. ShakhparunyantsVladimir P. Budak Alexei K. SolovyovAndrey A. Grigoryev Raisa I. StolyarevskayaAlexei A. Korobko Alexander I. TereshkinDmitry O. Nalogin Konstantin A. TomskyAlexander T. Ovcharov Leonid P. Varfolomeev
Moscow, 2012
Foreign Editorial Advisory Board:
Lou Bedocs, Thorn Lighting Limited, United KingdomWout van Bommel, Philips Lighting, the NetherlandsPeter R. Boyce, Lighting Research Center, the USALars Bylund, Bergen’s School of Architecture, NorwayStanislav Darula, Academy Institute of Construction and Architecture, Bratislava, Slovakia Peter Dehoff, Zumtobel Lighting, Dornbirn, AustriaMarc Fontoynont, Ecole Nationale des Travaux Publics de l’Etat (ENTPE), FranceFranz Hengstberger, National Metrology Institute of South AfricaWarren G. Julian, University of Sydney, AustraliaZeya Krasko, OSRAM Sylvania, USAEvan Mills, Lawrence Berkeley Laboratory, USALucia R. Ronchi, Higher School of Specialization for Optics, University of Florence, ItalyJanos Schanda, University of Veszprem, HungaryNicolay Vasilev, Sofi a Technical University, BulgariaJennifer Veitch, National Research Council of Canada
LIGHT & ENGINEERING(Svetotekhnika)

3
CONTENTS
VOLUME 20 NUMBER 3 2012
LIGHT & ENGINEERING(SVETOTEKHNIKA)
Pavel P. Zak and Mikhail A. Ostrovsky
Potential Danger of Light Emitting Diode Illumination to the Eye, in Children and Teenagers 5
Andrei V. Aladov, Alexander L. Zakgeim, Mikhail N. Mizerov and Anton E. Chernyakov
Concerning Biological Equivalent of Radiation of Light-Emitting Diode and Lamp Light Sources with Correlated Colour Temperature of 1800 K–10000 K 9
Matej B. Kobav and Grega Bizjak
LED Spectra and Melatonin Suppression Action Function 15
Detlef Düe
LED Lighting Industry: Opportunity or Health Hazard? 23
Spiroc Kitsinelis, Georges Zissis, and Lydie Arexis
A Study on the Flicker of Commercial Lamps 25
Peter Dehoff
Lighting Quality and Energy Effi ciency is not a Contradiction 34
Svetlana M. Lebedkova, Natalia S. Panteleeva, and IrinaV. Stepanova
Infl uence on Visual Working Capacity of Colour Decoration of the Workplace for Work with a Computer 40
Richard Kittler and Stanislav Darula
Trials to Propose and Accept new Standard Daylight Criteria 55
Аlexander L. Kuznetsov, ElenaYu. Oseledets, Alexei K. Solovyov, and Maxim V. Stolyarov
Experience of Application of Hollow Tubular Light Guides for Natural Illumination in Russia 62
Mojtaba Navvab
Measureable Domain for Colour Differences within Virtual Environment 71
Grega Bizjak, Matej B. Kobav, Anne-Mari Ylinen, Marjukka Puolakka, and Liisa Halonen
How Energy Effi cient is Road Lighting Practice in Slovenia 82
Anne-Mari Ylinen, Marjukka Puolakka, Liisa Halonen, and Grega Bizjak
Road Lighting in Change – Towards Better Energy-Effi ciency in Finland 89
Contents #4 96

Scientifi c EditorsSergey G. Ashurkov Raisa I. Stolyarevskaya
Style EditorMarsha Vinogradova
Art and CAD EditorAndrey M. Bogdanov
Editorial Offi ce:VNISI, Rooms 327 and 334 106 Prospekt Mira, Moscow 129626, Russia Tel: +7.495.682.26.54 Tel./Fax: +7.495.682.58.46 E-mail: [email protected] http://www.sveto-tekhnika.ru
Znack Publishing House P.O. Box 648, Moscow, 101000, Russia Tel./Fax: +7.495.361.93.77
© Svetotekhnika, 2009© Znack Publishing House, 2009
Moscow Power Engineering Institute Press

71
experiences given 8 to 15 % of the general popula-tion are colour blind. Most people even in their as-sociated technical groups are not trained colorimet-rically, and these days expect to get what they see through web base sources as electronically trans-mitted images of products. This is based on their eye colour sensitivity and past experiences. Col-our as an interdisciplinary subject requires partici-pation of researchers in electronics, computer sci-ence, chemistry, physiology, psychology fi elds and practitioners [1].
Typically, spaces designed by architects continue to evolve throughout the different stages of design. Designers have a need to view the same design op-tion under many different scenarios such as chang-ing lighting conditions, materials and surface col-ours, etc. Each condition requires multiple inputs for activating the visual system. However, stimulating the viewer’s eye does not include the optical fi lter-ing and light scattering within the eye. Combining photorealism with physically accurate simulation re-quires special algorithms for the use of the spectral data within rendering methods. The objective is to create an image that gives a visual stimulation such that the eye perceives the scene as if it were an ac-tual stimulation from a spectral radiance source and or at some relative scale [2, 3, 4].
Physically based algorithms provide applications that are highly desirable to designers and illuminat-ing engineers, but their computation is very time consuming. Given the current capabilities of the dis-play monitors to produce accurate display of such results, it is not fully possible to produce the spec-tral radiance stimulations at the eye. Photorealistic
ABSTRACT
Lighting design professionals use simulation techniques for evaluating and communicating the performance of each design option to their clients. Combining different simulation techniques with an interactive Computer Assisted Virtual Environment “CAVE” in real-time can remarkably accelerate the decision-making process. A Virtual Reality envi-ronment produces sensory stimulation very close to reality. Colour, or its perception, is one measure or index by which to estimate the closeness of the sen-sations created with simulation techniques, which demand a high degree of realism compared to the physical environment.
Quality of Colours or their appearance generat-ed within a scene illuminated by the various CAVE projectors, are evaluated using the Colour Quality Scale Index. The Colour Rendering Index (CRI) us-ing Munsell Colour samples and the CIE LAB are used to examine the consistency of colour reproduc-tion. The results show that the source spectral power distribution and the surface spectral refl ectance are the key dimensions or the parameters that are most essential in providing a stimulus, which produces a realistic colour appearance and a successful simula-tion of a distinct lighting condition within the CAVE.
Keywords: spectral distribution, photometry, colour appearance, rendering, virtual environment
1. INTRODUCTION
Colour is a matter of perception and subjective interpretation. People have different references and
Light & Engineering SvetotekhnikaVol. 20, No. 3, pp. 71-81, 2012 No. 2, 2012, pp. 53-61
MEASUREABLE DOMAIN FOR COLOUR DIFFERENCES WITHIN A VIRTUAL ENVIRONMENT
Mojtaba Navvab
The University of Michigan, USA E-mail: [email protected]

Light & Engineering Vol. 20, No. 3
72
mechanical engineering and medicine have proven to be most benefi cial to designers and researchers. The focus of these applications is mostly on the vis-ual and aural aspect of the simulated scenes.
The major spatial attributes such as surface col-ours and the lighting system spectral characteristic and its luminance distribution within a virtual envi-ronment are simulated and measured while the user is experiencing the space, and the perceived bright-ness of the light sources within the current limitation of the computing power, within real time constraints. The post processed and analyzed lighting condi-tions are displayed in various visualization modes for lighting parametric studies. The data acquisition system allows for the simultaneous recording of the virtual environment and visual response of the us-ers such as their pupil size change due to the light-ing intensity and or spectral changes within a scene. The real time measuring capabilities using portable spectrometers allow one not only to record and ana-lyze the conditions with users’ reactions, but also to view the spectral characteristics of the light and as-sociated colours reaching the users’ eyes.
2.2. CAVE
A Computer Assisted Virtual Environment or the so called “CAVE” is an immersive display system for a virtual reality environment. Virtual Reality (VR) is created within a cubicle space where at least three of the four walls depending on a given facil-ity’s capabilities; the fl oor and or the ceiling are all used as projection screens. Simultaneous use of all display systems outperform most other displays such as head mounted displays. It requires the use of 3D-glass or goggles and a tracking system device, which can locate the user with tracking system software. The system has obvious limitations given the typi-cal 3.048 m2 or (10 ft2) size of the CAVE with rare projection screens. The stereoscopic format project-ed images at a known frequency through the lens of the 3 D-glass as synchronized with the human eye or vision frequency response, provides the illu-sion of depth along with corrected perspective for a given viewing direction as a function of time. The tracking system combined with controller such as wand or joy-stick provides ease of navigation within a simulated scene.
This computer generated, interactive, 3 D envi-ronment [5, 6] provides opportunities to stimulate the users’ (human, animal, plants and robots) Visual,
renderings are highly demanded by the advertising industry, and given the ever increasing ability of in-teractive computing power; there is a new growing need by architects. The desired condition or the re-quirement is to generate a scene that is indiscernible from the photographic image of the real space given the texture or the colour appearance of the surface. For example, an image that is generated during the project schematic design phase should be an accurate representation of the building image after its comple-tion. The goal is to provide a method for the evalua-tion of the virtual luminous environment and choices made during the design process on actual material samples. In this case the image of the interior space has to be believable and be perceived as equal to re-ality. It is hoped to produce similar physical sensa-tions in the eye, although it should be noted that the spatial, temporal and the chromatic (hue, value as a relative brightness and saturation) characteristics are within the limits of the CAVE lighting system. Na-tionally, internationally known learned institutions and associated technical societies have devoted some of their resources to educate people who need bet-ter understanding of light and vision. The need for dedicated laboratory space and various experimental setups, and the required instrumentation along with support staff are major objective diffi culties to the study colour and its impact. In order to be able to explain the phenomenon of colour to lighting profes-sionals and their clients as relating to their architec-tural projects, the use of 3 D Virtual Reality Labora-tory (VRL) is found to be most useful.
2. METHODOLOGY
The following sections will describe the use of a 3 D-VRL for its dynamic capabilities within archi-tectural engineering fi eld. After an overview of the system and related components, some specifi c appli-cations related to colour appearance and the measur-able domain in colour differences within the CAVE are presented. The system’s limitations, future de-velopment in software and the application of a new proposed method are discussed.
2.1. Virtual Reality
VR is the simultaneous simulation and perception of physical attributes of reality in an interactive, vir-tual, computer-generated environment in real-time. VR applications in architecture, music, computation,

Light & Engineering Vol. 20, No. 3
73
of brightness sensitivity, total and simultaneous contrast ratios, the creation of the primary colours, spectral sensitivity of the eye to a given scene (cone sensitivities) versus what is being viewed or meas-ured in the CAVE for brightness, contrast, “prima-ry” RGB values, sources of distortion: projectors, screens (front and rear projected), inter-refl ection, transparency and tint of the eyewear. The follow-ing section describes UM-3 D Lab CAVE environ-ment and how the visual system is being stimulat-ed within the VR, and how the users’ experience and interactions are measured given the system capabilities.
2.4. The UM3 D Lab
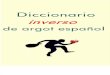
The UM 3 D VR Laboratory includes an immer-sive virtual-reality CAVE-like environment, meas-uring 10 ft (3.048 m) in width, depth, and height. It runs on a cluster of six workstations, with one control computer, one motion-tracking computer, and four rendering computers. The renderers are Box Tech Workstations, with quad-core CPUs at 2.6 GHz, 8 GB RAM, and NVIDIA Quadro FX 5600 + GSync graphics cards. Four Christie Mirage S+4 K projectors produce 3 D images on the left, front, right, and fl oor surfaces. The resolution per surface 1024 x 1024 pixels. The stereo mode is frame-se-quential (alternating left-right) at 96 frames per sec-ond. Infrared emitters synchronize Stereo Graphics Crystal Eyes® liquid crystal shutter glasses with the projectors. A Vicon MX13 system with eight 1.3 megapixel cameras provides wireless (near infrared) motion-tracking of the shutter glasses and a Log-itech Rumble Pad game controller. The sound sys-tem comprises four Klipsch speakers mounted in the upper corners, a Klipsch subwoofer on the fl oor a short distance away, and two amplifi ers at 100 watts per channel. The software is an ongoing in-house development, named Jugular, that integrates sever-al open-source, proprietary, and custom-developed subsystems for graphics, sound, animation, physics, motion-tracking, data management, and network-ing [5, 6]. Real and schematic views of the CAVE’s back screen projectors outputs and their locations are shown in Fig1.
2.5. Visualization software
The latest review on visualization software shows that major efforts are being made toward the use
Auditory and Tactile (VAT) systems within a com-puter generated environment by [7, 8]. Any simula-tion worth doing within the VR is worth measuring and quantifying given the user’s interaction in this case; human and the feedback through the system interface. Measurements of the VAT system within a simulated environment determine the domain of pos-sibilities for the users’ VAT sensitivity functions. The human sensation at the three so called classifi ed stages of VR, namely 1) passive (watch movie), 2) exploratory (walk through scene) and 3) immersive (interactive) are stimulated within CAVE through the use of eyes, ears and touch. This interface in-volves a) preconscious and b) conscious process-ing. The preconscious takes into account the basic human ability to perceive colour, shape and move-ment while being stimulated or while experiencing the simulated environment. However, the simple act of navigating through a scene requires learned skills as part of the conscious processing.
2.3 Visual system
The pupil is the aperture, which controls the fl ow of light. The full spectrum of light is passing through the crystalline lens that changes its shape us-ing muscles to perform focusing of light on the sur-face of retina. The rods and cones within the retina surface convert the full spectrum given their avail-able sensitivity functions for humans, and pass them for processing to the brain with electrical impulses. During reading the visual system requires conscious visual processing, while the perception of brightness and or movement within peripheral fi eld of view is more preconscious and the user is less aware of its impact on the visual system physiologically. The eye’s accommodation and convergence contribute to the sense of immersion given some limited fi eld of view due to the use of 3 D glasses, and the rate of refreshing of the projected image. Integration of these capabilities within a VR system contributes to the reduction of real time computing, and hence to increase rendering frame rate with high resolu-tion imagery. The head movement tracking system and 3 D stereoscopic technology contribute to rec-ognition of depth cues and some effects such as mo-tion parallax.
Some of the parameters for measurements and testing, given the ease of use and accessibility to portable instrumentation, include: eye physiolo-gy and associated range of pupil diameters, range

Light & Engineering Vol. 20, No. 3
74
a high level of realism in colour appearance does not necessarily require a high degree of accuracy in their physical representation. The complex in-teraction among human perception of colour as re-lates to a light source and the eye as a receiver im-pacts the perceived colours within real or simulated scene. This is due to the Absorption, Refl ection and Transmittance (ART) of light along with associated scattering effect within the fi eld of view. Given the spectral power distribution of the projectors within the CAVE and the spectral sensitivity of the users’ eyes under these simulated conditions, it is possible to create colour appearance of objects or materials with or without texture that are traceable and could be used as visual stimuli within this simulated envi-ronment. This study focuses on estimating the do-main of such variables, which are contributing to the simulation of a scene with physically accurate colour appearance. For a known spectral refl ectance fac-tor, the tristimulus values of a given source (in this case, the CAVE projector) are estimated based on the real time measured spectral power distribution. The CIE chromaticity and colour space are calculated and the colour differences for selected samples for a given standards colour are determined. It is then possible to measure the illuminance and or irradi-ance levels arriving at the eye within this virtual en-vironment and estimate the portion of the spectrum that reaches the retina at a given time for a viewing direction [11].
The colour Quality Scale (CQS) Program by NIST provides calculation of colour quantities of various lamp SPDs including CRI (CIE 13.3) and also the NIST CQS. The colours of the Munsell col-our chips used in CIE 13.3 and the 15 samples used in CQS are presented on the screen for both refer-ence and test illuminants. This capability provides a visual impression for the colour differences.
By specifying a desired CCT value, the program automatically does the colour mixing of RGB of the 3 or 4 sources so that the mixed white light that produces the specifi ed CCT with Duv=0 (exactly on the Planckian locus). This feature allows one to use Solver to optimize in this case the projectors’ measured SPD for maximum luminous effi cacy or maximum CRI, etc., under given simulated condi-tions. This capability provided the option not only to evaluate the performance of the projectors given their measure SPD but also to test the possibilities of change in one of the projectors SPD by using ex-ternal theatrical fi lters to create various scenes with
of 64-bit systems. The following software packag-es are the most used programs by architects and the industry given their capabilities and availability, re-gardless of the cost or affordability by individuals. These names are not listed in any hierarchy of use or cost: Radiance, Form Z Render Zone by Autodesk System, 3 ds Max Design 2011 by Autodesk, Bent-ley Micro-station (luxology), Navis Works Simulate 2009 by Info Matrix software international, Pianesi 5, Modo 302, NuGraf and Poly Trans by Okino com-puter graphic.
They each provide an image and with some lim-ited option, some provide WRL formatted fi les to be used within the CAVE WRML system along with re-alistic visual information that helps users make de-sign decisions. However, a detailed review of their unique capabilities is beyond the scope of this pa-per [3, 9].
2.6. The Virtual Reality Modelling Language (VRML)
The VRML is representative of simulation capa-bilities in the CAVE. VRML version 2, also known as VRML97, was adopted as an International Stand-ard ISO/IEC 14772 in 1997 [10]. The standards specify a fi le format, a content model, and algo-rithms for its interpretation. The model is a directed acyclic graph that includes nodes for geometry, col-our, texture, and light, as well as sound. However, it provides for only one texture per shape and one pair of texture coordinates per vertex.
Strict adherence to the “ideal VRML implemen-tation” actually prohibits calculation of shadows and indirect lighting. The equations used within the standard do not accommodate such desired ef-fects. VRML version 2 was amended in 2002 to add geospatial and NURBS support, but the shape, material, lighting, and sound specifi cations remain unchanged [9].
2.7. NIST’s CQS Program
There is a major effort underway by National In-stitute of Standards and Technology (NIST) toward the development of traceable standards and guides for instrument and measurements that provide best possible accuracy to characterize colour appearance of objects or materials with texture and gloss. The VR or CAVE environments with their high degree of realism are most desirable to users, However,

Light & Engineering Vol. 20, No. 3
75
to and from spectra has been a major undertaking in order to match the infi nite number of spectra to create the same colours that were defi ned by RGB in the program. The RGB colour space as defi ned by the standard XYZ matching functions, and the matrix converting XYZ to RGB is described in many sources [9, 14, 15, 16]. The dynamic range of these colour matching functions is much wider than the range of 360 nm to 780 nm wavelengths, which exist within computer rendering systems while maximiz-ing for the eye focusing range. The use of the white sample during the spectral measurements provides an accurate match of RGB colours. Good attempts have been made in this study using spectral measure-ments under real sky conditions to match the com-posite colour of surface materials.
The use of spectral scan and ocean optics spec-troradiometer and spectrphotometers provided the simultaneous measurement of the computer gener-ated scenes [17]. Latest recommended procedure for better accuracy in modelling requires the so called N stepping algorithm. The N step rendering procedures recommended by [9] was used for N=3. This proce-dure requires the measured spectrum data to be di-vided into three consecutive, equally spaced ranges of wavelengths or bands ([380–510 nm], [515–645 nm], and [650–780 nm].) The average RGB values for each of the wavebands are calculated using the procedure described in section 3.2, and then used as the corresponding colour descriptor. The out-puts of each image for given ranges of wavelengths or bands is rendered, each image accounting for a different part of the spectrum. Then images were combined into a standard three-channel RGB im-age similar to creation of high dynamic range imag-es within the VRML & Jugular 2 and 3 Scene fi les. Figs. 2 and 3 represent some of the results of this modeling’s efforts.
or without an equal colour rendition index or com-plexly distributed chromaticity such as simulation of two sequential scenes with equal chromaticity but not the same SPD or CCT. The use of saturated col-our samples solves the problem of the current CRI for SPDs consisting of narrowband peaks, if desired for simulation, and the equally spaced 15 samples (rather than current 8 samples) that prohibits gam-ing of maximizing the index. It was noted by the authors that the object colour space; W*U*V* used in CIE CRI is replaced by CIELAB due to its non-linearity [2, 12].
3. METHODOLOGY
This paper focuses on the differences in crite-ria between physically accurate or photo realistic images that could be utilized in architectural light-ing design applications, which are functionally re-alistic. 3 ds Max Design 2011 is used to simulate views of a building under day and night time con-ditions. The spectral properties of the building sur-face under real or controlled laboratory conditions are measured, along with a white reference sample. The CIE standards were followed to establish the colour of the illuminant and the spectral refl ect-ance of the white sample used as a reference in the scenes [4,13, 15].
The available functions within 3 ds Max’s com-bined with all the VRML rendering graphic capa-bilities were used to simulate the surface material optical properties, along with photometric and radi-ometric characteristics. The measured spectral data were sorted and used as an input to an established algorithm to produce the best approximation for RGB of each material sample. The calculated RGB were then used as an input to the software to gen-erate the image of the objects. Conversion of RGB
Fig. 1. Real and schematic views of the CAVE’s projectors outputs and their locations

Light & Engineering Vol. 20, No. 3
76
the RGB triplets, to be used as the colour descriptor in the VRML material and Jugular 2 & 3 Scene fi les fi le [5, 6, 10], See Section 2.5. The same procedure is used to code the colour of the illuminant, CIE x, y chromaticity values, from XYZ tristimulus values, CIE x, y chromaticity values as follows:
x = X/ (X + Y + Z),and y = Y/ (X + Y + Z).
(4)(5)
Fig. 2 shows selected examples of interior spaces created by the software and the average RGB com-bined with realistic textures and projected for meas-uring its SPD as viewed within the VR enclosure.
3.2. Requirement for Computer Simulation
For a consistent and accurate analysis, it is nec-essary to keep the input quantities within a realistic range of real conditions. It is imperative that the in-put to the rendering models is clearly defi ned given the limits for each software rending engine and their
3.1. RGB conversion to spectra
The following protocol or procedure for the con-version of the spectral data to RGB is directly ex-tracted and followed step by step based on the rec-ommendations provided in reference [9]. A surface refl ectance function S (λ) to X, Y, Z tristimulus val-ues are converted using x (λ), y (λ), and z (λ) match-ing functions with the adjusted CIE 1931 match-ing function using equations 1, 2 and 3 as described in reference [16]:
X = k ∫S (λ)x (λ)dl,Y = k ∫S (λ)y (λ)dl, Z = k ∫S (λ)z (λ)dl.
(1)(2)(3)
The X, Y, Z tristimulus values are then converted to RGB with a conversion matrix T (3 by 3 matrix), which is based on the primaries of the display, as de-scribed in references [2, 12, 15, 16]. The primaries are used to derive the conversion matrix T. Multi-plying the XYZ tristimulus values with T produces
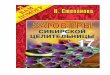
Fig. 2. Measuring the SPD of a simulated scene within the VR enclosure
Fig. 3. Measuring RGB within a simulated scene in the immersive VR enclosure. The manikin head is fitted with spec-trometers behind the 3 D stereoscopic-glass to account for the glasses’ absorption and tint while measuring the SPD for a
given viewing direction

Light & Engineering Vol. 20, No. 3
77
the appearance of the materials within a scene given their required metric, diffuse colour (R, G, B), ambi-ent intensity (0 to1), specular colour (R, G, B), shini-ness (0 to1), transparency (0 to 1) [5, 6]. The opti-cal characteristics and angular dependence of vari-ous materials were measured and the conversions to RGB were used as an input following the earlier rec-ommended procedures. Some of these metrics such as transparency are not available within the in-house written software.
4. RESULTS
The projectors and the CAVE wall surfaces’ measured SPD are shown in Fig. 4. The data was formatted and normalized to the peak wavelength within the range of 380 to 780 nm and used as input to the CQS program for colour quality analysis. SPD of a white colour scene viewed with and without the 3D stereoscopic-glass were also measured to ex-amine the impact of the 3 D glasses on the viewers’ colour perceptions, see Fig. 5. The increase power in the range of 730 nm to 780 nm of the spectrum as shown in Fig. 4 are due to the random infra-red beam projections by the eye tracking system. As shown in Fig. 5, the measured results for the vis-ible range show the impact of the 3 D stereoscop-ic-glass on and off settings used to view the scene. There are obvious transmittance losses due to the 3 D glass settings. Saturation, CCT and RMS factors are all also calculated to evaluate selected simulated scenes not only for calibration but also for architec-tural applications. As stated in the documentation written for the CQS program by Ohno and Davis, the CQS value (100-RMS_Delta Ei * x) is scaled so that the continuity of the values of the existing lamps
required input variable, and that the possible range of predicted illuminance and or luminance levels along with associated RGB for a given scene is iden-tifi ed. Some lighting applications require accurate levels of surface luminance to be simulated as the background in an image and not in the texture of the surface only. The images in Fig. 2 show the realistic lighting conditions seen through CAVE and Fig. 3 shows the measurement of the real time Spectral refl ections of the scenes as viewed by the viewers, Simple surfaces with known RGB are also simulated as part of the calibration of the projection system for the projected light or scene passing through the back screen projection with diffuse translucent surfaces.
3.3. VRML Modelling of Material Including Glazing
Major characteristics of surface materials and associated colour appearances are created based on their spectral refl ectance and transmittance in the case of interior surfaces including glass. Refl ection and transmission of the diffuse and specular com-ponents of surfaces are not actually or realistically modelled within some programs. RGB is often used as the basis of colour space and colour computation in computer graphics. The rendering software inter-nally defi nes the CIE chromaticity coordinates of the RGB values. Simulation programs normally use an RGB averaging system while light source contains the full spectrum. RGB averaging as an input could affect the colour accuracy of the simulated scenes. However, the material’s refl ection and transmission in units of RGB is only for normal incident and not for the angular dependency. The VRML scene input requires the following variables to be specifi ed for
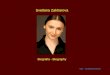
Fig. 4. Measured SPD within the CAVE Light projected via mirror and through walls
Fig. 5. Measure SPD with and without 3D-stereoscopic-glass off and on setting

Light & Engineering Vol. 20, No. 3
78
The SPD was measured simultaneously while the meter was aimed at the Blue, Green, Red wall separately. The presence of noticeable power due to R, G and B as shown in Fig. 7 demonstrate the contributions of the side walls with different colour to the meter cosine corrected head with a 180 de-gree fi eld of view. There is also some inter-refl ec-tion within the walls given the size of the CAVE. To better demonstrate this condition, the SPD and its dynamic variations due to simulated refl ected component from a Blue banner moving through a scene was measured to establish the sensitivity or the domain of the measurable refl ections in the scene and the irradiance reaching the viewers’ eye. Fig. 8 shows the SPD of the refl ections at various viewing directions or time intervals as animated in the CAVE. The wavelengths were intentionally limited to 430 nm and to 500 nm to show the high-er data resolution. Current studies within the VR environment are focused on the spectral sensitiv-ity of the eye and quality of the colour appearance under photopic and mesopic conditions given the limitation of the CAVE. The current data clearly indicates that it is possible to measure within these in both of the regions.
are best maintained. The scale is adjusted so that the average of CIE source F1 through F12 (CIE 15.2) is the same. 0–100 Scale: The CQS values that are negative or up to ~20 are converted by a non-line-ar equation so that the minimum CQS value is zero (i.e., the CQS scale is from 0 to 100). This does not affect CQS values >30. The CRI, CCT and the CQS calculations are summarized in Table 1.
The simultaneous projections of the RGB for a given wall within the CAVE provide the opportu-nity to measure the impact on the viewers’ eye due to simultaneous viewing of the RGB walls. The cal-culated CQS and Saturation factor show the degree of change due to these colour viewings. The ob-served differences in CRI, CQS and CCT in Table 1 indicate the differences are due to parameter chang-es the limitation of the sources (projectors) intensi-ties and the colour produced within this particular VR geometric environment. Fig. 6 shows sample output of the CQS for the CRI index calculation us-ing measured front projector’s SPD. These colours do not represent the exact colour due to limits of the reproduction of the medium used. The Solid RED show the projector SPD and the CIELAB is also shown.
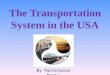
Fig. 6. Sample output for NIST CQS and CRI calculations using measured front projector’s SPD
Table 1. Summary of the colour index calculation using measured SPD

Light & Engineering Vol. 20, No. 3
79
5. ANALYSIS AND DISCUSSION
This study aims to examine the measureable domain of colour differences within the simulated physical aspects of the virtual environment includ-ing actual sensations produced for vision. Specially designed instrumentation allows users to measure the dynamics of the light and colour as experienced by the user. An immersive virtual pre-defi ned or ran-dom pathway through an architectural space allows the user to measure the distinct lighting conditions produce with a specifi c colour appearance and spec-tral variation effects in real-time.
Fig. 9 shows that the banner surface refl ects light in the blue regions. The individual scene then cap-tured with a digital camera calibrated to measure the luminance distribution. The luminance distribution of the simulated scene is shown in Fig. 10.
The users’ reactions to the direct sensations due to lighting (darkness, brightness and colour of the
Fig. 9 shows the image of the set up for the re-sults shown in Fig. 8 as one of the simulated scenes or time intervals with the refl ection of the blue light refl ected off of the blue banner. The result shows that in the blue wavelength region the refl ectance (the amount of refl ected light) is high but in other wave-length regions the refl ectance is low. This particular scene was simulated utilizing an algorithm for visu-alization, including real-time shadows and massive lighting, a rendering engine that implements algo-rithms published by [17], and others developed in-house, taking advantage of modern graphics hard-ware with GLSL shader programs.
The nature of the surface colour is measured by the spectrophotometer and the differences in the elements of colour, which are not noticeable to the human eye, are shown. Some variables were used to examine the limits and the range of luminance within a scene, given lighting scenarios and the pro-posed conditions as a background luminance. This approach is effi cient given the current use of col-our models utilizing spectral data within the avail-able software applications. Refl ectance, transmit-tance and spectral characteristics of the materials are required input for modelling and simulating the colour appearance. See section 2.7 for NIST CQS program. By taking a measurement with a spectro-photometer and displaying the results on a spectral graph, it is possible to show the performance of dif-ferent rendering models that permit numbers of lay-ers within a composite of materials or textures based on the physical spectral measurements under real and controlled laboratory conditions. The visualiza-tion for architectural application and simultaneous measurements of these specifi c physical characteris-tics within the CAVE requires full compliance with industry and international standards [18].
Fig. 7. Measured SPD within the CAVE RGB projected through separate walls
Fig. 9. Measured SPD in real time within the animated scene in the CAVE
Fig. 8. Measure SPD of blue refl ected light in different viewing directions

Light & Engineering Vol. 20, No. 3
80
of the lighting design challenges can be solved within the virtual world. The higher the quality of the image for a design solution that is close to the real world, the better will be the users satisfac-tions and the more it will provide real interaction within the visual scene. Although, there are unique applications in which the design objectives demand high accuracy in simulated results, this method may not require absolute accuracy, in order to acceler-ate the decision making process. The information provided by these results and analysis could outline a set of guidelines or requirements for simulation of the outdoor luminance and indoor illuminance. Given the dynamic ranges of direct and refl ected values within CAVE for both simple and complex interior spaces, the results of these virtual simula-tion studies demonstrate the limits and the accu-racy of the current calculation algorithms. Their ability to take into account the physical proper-ties of the material do, in fact, impact applications of visualization and prediction of the lighting con-ditions or perceived colours within each simulated scene. The use of computer generated images with-in CAVE could be an alternative to the use of real or full mocked up space during the design concept evaluation.
ACKNOWLEDGEMENT
This project was made possible through the use of the UM 3 D-LAB. Special thanks to the research team (Theodore W. Hall, Eric Maslowski, Klaus-Pe-ter Beier, Sean Petty) for their full support and the use of the CAVE’s unique capabilities and special application of the control system and software re-quired to create the virtual scenes.
REFERENCES
1. Sik La´ nyi Cecilia, Zsolt Kosztya´ n, Bala´ zs Kra´ nicz, Ja´nos Schanda, and Mojtaba Navvab, Using Multimedia Interactive E-teaching in colour Science, IESNA, LEUKOS VOL 4 NO 1, July 2007, pp. 71–82
2. Davis W., and Y. Ohno, Toward an Improved colour Rendering Metric, Fifth International Confer-ence on Solid State Lighting, edited by Ian T. Fer-guson, etl, Proc. SPIE Vol. 5941, 59411 G (2005).
3. Ritschel T., M. Ihrke, J. R. Frisvad, J. Cop-pens, K. Myszkowski and H.-P. Seidel, Temporal Glare: Real-Time Dynamic Simulation of the Scat-
scenes) and spectral dynamic changes, provide op-portunities to correlate the dynamic ranges of visual experiences with their intended or designed target values that could be measured in real-time. The vis-ual sensitivity and full or limited fi eld of view (bin-ocular or fovea) are implemented in the generated scenes. Various scenes with or without equal colour rendition index or complexly distributed chromatic-ity are modeled in a virtual computer-generated en-vironment to provide repeatable conditions for test-ing human visual performance. It is an easy task to create a realistic scene without fully understanding colorimetric issues in colour matching. Using the default settings within some software designers with some computer graphic skills could simulate the de-sired lighting conditions without accurate estimation of the RGB content of any colour stimulus. There are not such many specifi c software packages avail-able that can immediately produce the desired and accurate results without understanding the laws and mathematical models of colorimetrics. On the oth-er hand, architects fi nd it necessary to provide their clients with full access to visualization capabilities available today along with the literature and relat-ed educational material accessible via the web to a given extent on the subject, so that the users should understand how surface colours are generated, and what impacts their perception of colour and surface characteristics chosen by designers.
5. FINAL REMARKS/ CONCLUSIONS
VR is no longer being viewed as an entertain-ment system but now is being used in scientifi c in-vestigation for its visualization capabilities. Some
Fig. 10. Measured Luminance distribution of blue refl ected light

Light & Engineering Vol. 20, No. 3
81
12. Ohno Y., 2004. colour Rendering and Lumi-nous Effi cacy of White LED Spectra, Proc. SPIE Fourth International Conference on Solid State light-ing, 5530, pp. 88–98.
13. Navvab, M., Modeling colour Appearance of Glazing Systems under Different Daylight Condi-tions, International Journal of Light and Engineering Vol:17, No# 3 92–101,30–04–2009, ISSN 02362945,
14. Foley, J. D, van Dam, A. Feiner, S., Comp Graphics, Principles Practice, 2 nded. (Addison-Wesley, 1992).
15. Travis, D., Effective Color Displays (Aca-demic, 1991).
16. Wyszecki, G., Stiles, W. S. colour Science, 2 nd ed. (Wiley, 2000).
17. Kaplanyan A, Dachsbacher C (2010) Cascad-ed Light Propagation Volumes for Real-Time Indi-rect Illumination. In: Proceedings of the 2010 ACM SIGGRAPH Symposium on Interactive 3 D Graph-ics and Games (I3 D ’10), pp. 99–107.
18. ASTM: C 1376–97, & ASTM D 2244–02. & 19. http://lablog.engin.umich.edu/2010/10/why-
does-interior-designer-favor-one.html 20. http://www.PhotoResearch.com/PR-705/715
Spectroradiometer& http://www.oceanoptics.com/products/
tering in the Human EyeComp Graphics Forum, Vol 28, Issue 2, Apr2 k9, P:183,
4. Vos, J. J., “colourimetric and photometric properties of a 2-eg fund.observer,” colour Res. Appl. 3, pp. 125–128 (1978).
5. Andreatta PB, Maslowski E, Petty S, Shim W, Marsh M, Hall TW, Stern S, Frankel J (2010) Vir-tual Reality Triage Training Provides a Viable Solu-tion for Disaster-Preparedness. In: Academic Emer-gency Medicine 17/8:870–876
6. Beier KP (2000) Web-Based Virtual Reality in Design and Manufacturing Apps. In: Hansa Inter-national Maritime Jour 137/5, pp. 42–47
7. Myron Krueger. Artifi cial Reality 2, Addison-Wesley Professional, 1991. ISBN 0–201–52260–8
8. http://www.jaronlanier.com/pubs.html, http://en.wikipedia.org/wiki/ myron_W._Krueger
9. Ruppertsberg, A.I. and M. Bloj, Rendering complex scenes for psychophysics using RADI-ANCE: How accurate can you get? Journal of the Optical Society of America A, 2006. 23 (4), pp. 759–768.
10. ISO/IEC (1997) The Virtual Reality Mod-eling Language (ISO/IEC 147721:1997). ISO, Geneva
11. CIE. 2004. colourimetry & CIE 15. and CIE13.3 (1995. Method of Measuring CRI)
Mojtaba Navvab, Ph.D., a fellow member of the IESNA, a recipient of fi ve IESNA’s International Illumination Design Awards (IIDA) and the latter with several awards for daylighting research and for design input on some of the most prestigious architectural commissions of the 20 th century, a recipient of American Institute of Architecture (AIA) distinguished teaching award, chair of the Certifi cate Program in Simulation and Gaming Studies within Rackham School of Graduate Studies, member of International Advisory Board for the Lighting Research and Technology Journal


«СВЕТОТЕХНИКА», 2012, № 2 53
неотличима от фотографического изо-бражения реального пространства при заданных текстуре и цвете поверхно-стей. Например, изображение, созда-ваемое на этапе эскизного проекти-рования, должно в точности воспро-изводить возведённое здание. Задача заключается в том, чтобы создать ме-тод оценки виртуального светового пространства и вариантов выбора ре-альных материалов в процессе проек-тирования. В этом случае изображе-ние внутреннего пространства долж-но быть правдоподобным и воспри-ниматься как в точности отражающее реальное пространство. Желательно, чтобы оно оказывало на глаз то же са-мое физическое воздействие, хотя сле-дует отметить, что пространственные, временные и хроматические (цветовой тон, относительная светлота и насы-щенность) характеристики этого изо-бражения ограничены возможностями осветительной системы CAVE. Извест-ные в отдельных странах и во всём мире научные учреждения и техниче-ские общества часть своих усилий на-правляют на образование людей, нуж-дающихся в лучшем понимании света и зрения. Основными объективными препятствиями на пути изучения цве-та и его действия являются потребно-сти в целевых лабораторных площадях и различных экспериментальных уста-новках, а также в обслуживающем эти установки персонале. Для объяснения профессионалам-светотехникам и их клиентам роли цвета в проектах наи-более полезным оказалось использо-вание трёхмерной виртуальной реаль-ности (ВР).
2. Методология
2.1. Виртуальная реальность
ВР – это модель, обеспечиваю-щая возможность восприятия физи-ческих характеристик реального объ-екта при помощи создаваемого ком-пьютером в реальном масштабе вре-мени интерактивного виртуального пространства. Применение виртуаль-ного пространства в архитектуре, му-зыке, вычислительной технике, маши-ностроении и медицине доказало его чрезвычайную полезность для проек-тировщиков и исследователей. В слу-чае этих областей применения внима-ние главным образом сосредоточено на визуальных и акустических осо-бенностях моделируемых сцен.
дни принимает то, что получает из Интернета, за реальные изображения изделий, переданные электронными методами. Это зависит от чувстви-тельности цветового зрения людей и их предшествующего опыта. Для исследований в этой области требу-ются совместные усилия как учёных в областях электроники, вычисли-тельной техники, химии, физиологии и психологии, так и практиков [1, 2].
Обычно проектируемые архитекто-рами пространства продолжают изме-няться на всех стадиях проекта. Про-ектировщикам нужно наблюдать один и тот же вариант проекта в различных условиях, таких как изменяющиеся освещение, материалы, цвета поверх-ностей и др. Для отображения каждо-го из этих условий требуется наличие большого числа активирующих зре-ние входных сигналов. Однако стиму-ляция глаза наблюдателя не учитыва-ет оптическую фильтрацию и рассея-ние света в глазе. Совмещение фото-реалистичности с физически точным моделированием требует наличия спе-циальных алгоритмов использования спектральных данных при визуали-зации. Целью при этом является мо-делирование изображения, которое воспринималось бы глазом так, как если бы оно создавалось реальным источником света [3–6].
Основанные на физических про-цессах алгоритмы обеспечивают край-не привлекательные для дизайнеров и инженеров-светотехников возмож-ности, однако соответствующие рас-чёты занимают очень много времени. Современные возможности монито-ров в части точного отображения ре-зультатов таких расчётов не позволяют в полной мере обеспечивать имитацию воздействия спектрального распреде-ления яркости на глаз. Фотореалистич-ная визуализация очень востребова-на в рекламе и, учитывая непрерыв-но возрастающие интерактивные воз-можности компьютеров, всё больше и больше нужна архитекторам. Жела-тельно или необходимо уметь сформи-ровать такую сцену, которая была бы
Аннотация
1Профессиональные проектиров-щики освещения используют моде-лирование для оценки различных ва-риантов проектов и обсуждения их с клиентами. Совмещение в режиме реального времени различных мето-дов моделирования с интерактивной компьютерной виртуальной средой (CAVE) позволяет значительно уско-рять принятие решения. Виртуаль-ная среда обеспечивает очень близ-кое к реальности сенсорное воздей-ствие. Цвет или его восприятие могут использоваться для оценки близости восприятия, обеспечиваемого весьма достоверным моделированием, к вос-приятию, имеющему место в реаль-ных условиях.
Результаты наших исследований показывают, что спектр излучения ис-точника света (ИС) и спектр отраже-ния поверхности – ключевые характе-ристики с точки зрения создания сти-мула, обеспечивающего реалистичное восприятие цвета и успешное модели-рование освещения в CAVE.
Ключевые слова: спектральное распределение, фотометрия, воспри-нимаемый цвет, визуализация, вирту-альная среда.
1. Введение
Цвет зависит от восприятия и его субъективной интерпретации. Люди имеют различные эталоны и опыт, причём 8–15 % населения страдают цветовой слепотой. Большая часть людей, даже входящих в те или иные технические ассоциации, не имеет колориметрического опыта и в наши
1 По материалам доклада на 27-й сессии МКО. 10-15.07.2011, Сан-Сити, ЮАР.
E-mail: [email protected] Сокращённый перевод с англ. Е.И. Ро-
зовского. Список литературы (22 назва-ния) депонирован в редакции.
Оригинал будет полностью опублико-ван в журнале «Light & Engineering» № 3.2012.
Область поддающихся измерению цветовых различий в виртуальной среде М. НАВВАБ 1
Мичиганский университет, Энн-Арбор, Мичиган, США

«СВЕТОТЕХНИКА», 2012, № 254
тем самым фокусировку света на по-верхности сетчатки. Палочки и кол-бочки преобразуют свет и передают в мозг соответствующие электриче-ские импульсы. При чтении зритель-ная система требует сознательной обработки зрительной информации, тогда как восприятия яркости и/или движения на периферии поля зрения скорее инстинктивны, и пользователь в меньшей мере осознаёт их физио-логическое воздействие на зритель-ную систему. Аккомодация и совме-щение точек фокусировки глаз спо-собствуют возникновению ощущения погружения с учётом как ограничен-ности поля зрения, обусловленной ис-пользованием трёхмерных очков, так и частоты обновления проецируемо-го изображения. Включение этих воз-можностей в виртуальную реальность способствует уменьшению времени вычислений и тем самым увеличе-нию кадровой частоты визуализации при создании изображений высокого разрешения. Отслеживающая движе-ния головы система и стереоскопиче-ские приборы способствуют воспри-ятию глубины и таких эффектов, как двигательный параллакс.
Характеристики, подлежащие из-мерению и тестированию при усло-вии возможности использования и до-ступности портативного оборудова-ния, включают в себя зависимости физиологических характеристик глаза и диапазона изменения диаметра зрач-ка, области чувствительности к яр-кости, коэффициентов полного и од-новременного контраста, особенно-стей формирования основных цветов и чувствительности глаза к конкрет-ной сцене (чувствительность колбо-чек) от наблюдаемых или измеряемых в CAVE яркости, контраста, «основ-ных» значений координат цвета R, G и B и источников искажений: проек-торов, экранов (освещаемых спереди или на просвет), внутренних отраже-ний, оптики и окраски очков.
2.4. UM3 D Lab
Лаборатория UM 3 D Lab Мичиган-ского университета, наряду с прочим, может создавать вариант CAVE – им-мерсивную ВР размером по 3,048 м в ширину, глубину и высоту. UM 3 D Lab имеет шесть взаимодействую-щих АРМ, содержащих один управ-ляющий, один отслеживающий дви-жения и четыре визуализирующих
онных экранов. Стереоскопический формат изображений, проецируе-мых через трёхмерные очки с извест-ной частотой, синхронизированной с частотной характеристикой чело-веческого глаза или зрения, создаёт в заданном направлении наблюде-ния меняющуюся во времени иллю-зию глубины при скорректированной перспективе. Следящая система вку-пе с управляющим устройством, та-ким как жезловидный пульт или руч-ка управления (джойстик), обеспечи-вает лёгкость перемещения в преде-лах смоделированной сцены.
Эта создаваемая компьютером ин-терактивная трёхмерная среда [7, 8] может воздействовать на зритель-ную, слуховую и тактильную систе-мы пользователя (человека, животно-го, растения или робота) [9]. Любое осуществляемое в виртуальной реаль-ности моделирование, стоящее того, чтобы его выполнять, стоит и того, чтобы измерять результаты воздей-ствия на эту реальность пользователя (в данном случае это воздействие обе-спечивается обратной связью через системный интерфейс). Измерения реакций зрительной, слуховой и так-тильной систем в смоделированной среде позволяют определять возмож-ности по чувствительности этих си-стем. В CAVE при помощи глаз, ушей и прикосновений моделируются ощу-щения людей применительно к трём способам взаимодействия с вирту-альной реальностью: 1) пассивному (просмотр кинофильма), 2) исследо-вательскому (перемещение в преде-лах сцены) или 3) иммерсивному (ин-терактивному). Это взаимодействие предполагает программирование ин-стинктивных и осознанных действий. При программировании инстинктив-ных действий учитывается врождён-ная способность людей восприни-мать цвет, форму и движение под воз-действием как реальных стимулов, так и смоделированной среды. Одна-ко простое перемещение в пределах сцены требует наличия благоприоб-ретённых навыков, которые относят-ся к осознанным действиям.
2.3. Зрительная система
Зрачок – это апертура, регулирую-щая световой поток. Весь видимый спектр «проходит» через хрусталик глаза, который под действием муску-лов меняет свою форму, обеспечивая
Основные характеристики про-странства, такие как цвет поверхно-стей, спектральные характеристики системы освещения и распределение яркости в пределах ВР, моделируют-ся и измеряются в процессе изуче-ния этого пространства пользовате-лем в рамках ограничений, наклады-ваемых на воспринимаемую яркость источников света возможностями ра-ботающей в режиме реального вре-мени вычислительной техники. Об-работанные и проанализированные условия освещения отображаются с использованием различных вари-антов визуализации для последую-щего изучения параметров освеще-ния. Система сбора данных позволя-ет одновременно регистрировать как характеристики виртуальной среды, так и зрительную реакцию пользо-вателей, такую как изменения разме-ра зрачка под воздействием света и/или изменений спектрального соста-ва излучения в пределах рассматри-ваемой сцены. Возможность прове-дения в реальном масштабе времени измерений с использованием мобиль-ных спектрометров позволяет не толь-ко регистрировать и анализировать различные условия и реакцию на них пользователей, но и учитывать спек-тральные характеристики попадаю-щего в глаза пользователей света и со-ответствующие цвета.
2.2. CAVE
CAVE – это компьютерная ВР, кото-рая представляет собой систему визу-ализации ВР, обеспечивающую пол-ный эффект присутствия (иммерсив-ную систему). ВР формируется в пре-делах небольшой комнаты, в которой в зависимости от возможностей уста-новки имеются по меньшей мере три стены из четырёх, тогда как пол и/или потолок выступают в роли про-екционных экранов. Одновременное использование всех этих систем ото-бражения предоставляет большие воз-можности, чем большинство других систем отображения (таких как шле-мы виртуальной реальности). Для это-го требуются стереоскопические очки и следящее устройство, способное ло-кализировать пользователя при помо-щи своего программного обеспече-ния. Система имеет очевидные огра-ничения, например, обусловленные типичными размерами CAVE при ис-пользовании эксклюзивных проекци-

«СВЕТОТЕХНИКА», 2012, № 2 55
та ISO/IEC 14772 [11]. В стандарте нормируются формат файлов, кон-тент модели и алгоритмы её интер-претации. Модель представляет со-бой ориентированный ациклический граф, содержащий узлы как по геоме-трии, цвету, текстуре и свету, так и по звуку. Однако в ней предусмотрены только одна текстура для каждой фор-мы и одна пара текстурных координат на одну общую точку.
Неуклонное стремление к «иде-альному VRML» на самом деле при-водит к невозможности расчёта те-ней и отражённого освещения. Ис-пользуемые в стандарте уравнения не позволяют рассматривать подоб-ные случаи. В 2002 г. вторая версия VRML была изменена для обеспече-ния возможности её использования в геопространственных целях и в рам-ках неравномерного рационально-го би-сплайна, однако её связанные с формой, материалом, освещением и звуком характеристики остались неизменными [11].
2.7. Программа для расчёта индексов цветопередачи по шкале CQS
Национальный институт стандар-тов и технологий (НИСТ) проводит большую работу по созданию про-слеживаемых стандартов и норм в ча-сти приборов и измерений, обеспечи-вающих наилучшую точность описа-ния воспринимаемого цвета объектов или материалов, обладающих тексту-рой и глянцем. Высокореалистичные виртуальная реальность или форми-руемое CAVE-пространство наибо-лее привлекательны для пользовате-лей. Однако для обеспечения высокой степени реалистичности воспринима-
2.5. Программные средства визуализации
Последние обзоры программных средств визуализации показывают, что основные усилия направлены на использование 64-битовых систем. Приведённые ниже пакеты программ, которые перечисляются не в порядке своей полезности или стоимости, наи-более востребованы архитекторами и промышленностью по причине сво-их возможностей и доступности неза-висимо от их стоимости или ценовой доступности для индивидуальных по-требителей. Это «Radiance» и «Form Z Render Zone» компании Autodesk System, «3 ds Max Design 2011» ком-пании Autodesk, «Bentley Micro-station (luxology)» и «Navis Works Simulate 2009» компании Info Matrix software international, «Pianesi 5», «Modo 302», «NuGraf» и «Poly Trans» компании Okino computer graphic.
Все они обеспечивают создание имеющих ряд ограничений изобра-жений, причём некоторые из них фор-мируют файлы в формате WRL, кото-рые могут использоваться системой CAVE вместе с реалистичной зритель-ной информацией, помогающей поль-зователям при принятии решений. Од-нако детальный обзор их уникальных возможностей выходит за рамки дан-ной статьи [5, 10].
2.6. Язык моделирования виртуальной реальности (VRML)
VRML является примером модели-рующих возможностей CAVE. Вто-рая версия VRML, известная также как VRML97, была принята в 1997 г. в качестве международного стандар-
компьютера. Последние оснащены четырёхъ ядерными 2,6-гигагерце-выми центральными процессорами, 8-гигабитными оперативными ЗУ и графическими адаптерами «NVIDIA Quadro FX 5600 + GSync». Четыре проектора «Christie Mirage S+4 K» создают трёхмерные изображения на левой, фронтальной и правой поверх-ностях и на поверхности пола. Каж-дая из поверхностей имеет разреше-ние 1024×1024 пикселей. Стереоско-пический режим – покадровый (с че-редованием право-лево) с частотой 96 кадров в секунду. ИК излучате-ли синхронизируют жидкокристал-лические затворы «Stereo Graphics Crystal Eyes»® с проекторами. Си-стема «Vicon MX13», содержащая во-семь 1,3-мегапиксельных фотокамер, обеспечивает возможность осущест-вляемого затворами и контроллером «Logitech Rumble Pad» беспроводно-го (в ближнем ИК диапазоне) отсле-живания движения. Акустическая си-стема содержит четыре установлен-ных в верхних углах динамика фир-мы Klipsch, расположенный на полу на небольшом расстоянии низкоча-стотный динамик этой же фирмы и по два 100-ваттных усилителя на канал. В качестве программного обеспече-ния используется непрерывно усовер-шенствуемая собственными силами программа «Jugular», содержащая не-сколько заимствованных из открытых источников, разработанных самостоя-тельно или на заказ подсистем и слу-жащая для обеспечения графики, зву-ка, анимации, воспроизведения фи-зических параметров, отслеживания движения, обработки данных и рабо-ты в сети [7, 8]. На рис. 1 приведены реальное и схематичное изображения создаваемых картин.
Рис. 1. Реальное и схематичное изображения картин, создаваемых на заднем экране входящими в CAVE проекторами, и расположения этих проекторов

«СВЕТОТЕХНИКА», 2012, № 256
чае рассматриваемой сцены в каче-стве эталона, осуществлялось в со-ответствии со стандартами МКО [1, 6, 13].
Для моделирования оптических ха-рактеристик материалов поверхно-стей и фотометрических и радиоме-трических характеристик использо-вались как все предоставляемые «3 ds Max» возможности, так и графиче-ские возможности VRML в части ви-зуализации. Измеренные спектраль-ные характеристики сортировались и использовались в качестве вход-ных данных, позволяющих выбран-ному алгоритму обеспечивать наилуч-шую аппроксимацию координат цвета каждого из образцов материалов. За-тем полученные координаты цвета ис-пользовались в качестве входных дан-ных для программного обеспечения, формирующего изображения объек-тов. Учитывая бесконечное количе-ство спектров, позволяющих полу-чать одни и те же цвета, координаты которых задавались программой, пре-образование координат цвета в спектр и обратно было чрезвычайно сложной задачей. Цветовое пространство RGB, задаваемое стандартными функция-ми сложения цветового пространства XYZ, и матрица преобразования коор-динат X, Y и Z в координаты R, G и B широко известны [6, 10, 14, 15]. Дина-мический диапазон этих функций сло-жения гораздо шире диапазона длин волн 360–780 нм, который использу-ется компьютерными системами ви-зуализации при максимизации диапа-зона фокусировки глаза. Использова-ние белого образца при проведении спектральных измерений обеспечива-ет хорошее уравнивание задаваемых RGB-цветов. В данном исследовании предпринята успешная попытка по-вторить сложную расцветку материа-лов поверхностей на основе результа-тов спектральных измерений, прове-дённых в реальных условиях под от-крытым небом.
Применение спектрального скани-рования вкупе со спектрорадиометра-ми и спектрофотометрами с оптикой типа «рыбий глаз» позволило прово-дить одновременные измерения пара-метров созданных компьютером сцен (http: SP.SC. & OC.OP). Новейшая из рекомендованных методик улучшения точности моделирования требует при-менения так называемого N-шагового алгоритма. Нами была использова-на рекомендованная в [10] методи-
Если указать желательное значе-ние коррелированной цветовой тем-пературы (Тц), то программа автома-тически осуществит RGB-смешение излучений трёх или четырёх ИС так, что результирующий белый свет бу-дет иметь заданную Тц при Duv = 0 (точно на линии чёрного тела). В рас-сматриваемом случае это позволяет пользоваться программой для опти-мизации измеренного СРЭИ проек-тора по максимуму световой отдачи или максимальному ИЦП и т. д. при данных модельных условиях. Это по-зволяет не только оценивать характе-ристики проекторов при известных измеренных спектральных распреде-лениях их излучения, но и проверять, можно ли внешними театральными светофильтрами менять СРЭИ одно-го из проекторов так, чтобы получать разные сцены при том или ином ИЦП или сложно распределённой цветно-сти; например, последовательно моде-лируя две сцены, характеризующиеся одинаковой цветностью, но разными СРЭИ или Тц. Если для моделирова-ния желательны СРЭИ, состоящие из узких пиков, то использование образ-цов насыщенного цвета решает воз-никающую в этом случае проблему определения ИЦП, а использование находящихся на равном расстоянии друг от друга 15-ти образцов (вместо используемых сегодня 8-ми) исклю-чает «игры» с максимизацией ИЦП. При этом в докладах [3, 4] отмечено, что цветовое пространство W*U*V*, использовавшееся МКО при опреде-лении ИЦП, вследствие нелинейно-сти заменяется на пространство LAB.
3. Методология
В центре внимания данной рабо-ты лежат различия в критериях оцен-ки физически точных и фотореали-стичных изображений, которые могут использоваться архитекторами при проектировании реального освеще-ния. Для отображения зданий в днев-ное и ночное время используется программное обеспечение «3 ds Max Design 2011». Спектральные харак-теристики поверхностей зданий из-меряются в реальных или контроли-руемых лабораторных условиях со-вместно с измерением характеристик белых эталонных образцов. Опреде-ление цвета излучения иллюминан-та МКО и спектрального отражения белого образца, используемого в слу-
емого цвета не обязательно требует-ся высокая точность его физическо-го отображения. Сложность процес-са восприятия цвета человеком, в ко-тором участвуют как источники света, так и выступающий в роли приёмни-ка глаз, влияет на воспринимаемые цвета как реальных, так и смодели-рованных сцен, что обусловлено по-глощением, отражением и пропуска-нием света, равно как и рассеянием света в пределах поля зрения. Зная спектральное распределение энергии излучения (СРЭИ) входящих в CAVE проекторов и спектральную чувстви-тельность глаз пользователя в моде-лируемых условиях, можно форми-ровать цветовой облик обладающих или не обладающих текстурой объ-ектов или материалов, который мож-но было бы прослеживать и исполь-зовать в качестве зрительного стиму-ла в этом смоделированном простран-стве. Задачей данного исследования является определение области изме-нения параметров, способствующих моделированию сцены, цветовое об-личие которой в точности соответ-ствовало бы реальному. При извест-ном спектральном отражении коорди-наты цвета излучения ИС (в данном случае – входящего в CAVE проек-тора) определяются на основе изме-ряемого в реальном масштабе време-ни СРЭИ. В цветовом пространстве МКО рассчитываются координаты цветности, после чего определяют-ся цветовые различия между выбран-ными и эталонными образцами цве-та. После этого можно измерять осве-щённость или энергетическую осве-щённость, создаваемую на глазе этим виртуальным пространством, и опре-делять, какая часть спектра «дости-гает» сетчатки в данный момент вре-мени при известном направлении наблюдения [12].
Разработанная НИСТ программа для оценки индексов цветопередачи по шкале CQS обеспечивает возмож-ность расчёта по СРЭИ ламп их цве-товых характеристик, включая индекс цветопередачи (ИЦП) [12], так и ин-дексы по CQS. На экран проецируют-ся полученные применительно к эта-лонному и тестируемому источникам света цвета используемых в [12] цве-товых карт Манселла и 15-ти исполь-зуемых в методе CQS образцов на-сыщенных цветов. Это обеспечивает возможность зрительного восприятия цветовых различий.

«СВЕТОТЕХНИКА», 2012, № 2 57
зуализирующие программы данные были полностью определены в рам-ках ограничений, накладываемых программным механизмом визуали-зации, и охватывали весь необходи-мый для визуализации набор параме-тров, и чтобы были заданы возмож-ный диапазон прогнозируемых зна-чений освещённости и/или яркости и соответствующие рассматриваемой сцене значения координат R, G и B. Некоторые области применения тре-буют точного моделирования ярко-сти не только текстуры поверхности, но и фона изображения. Приведён-ные на рис. 2 полученные в CAVE изо-бражения отражают реальные усло-вия освещения, а на рис. 3 наблюда-
тем используются для описания цвета материала в файлах «VRML & Jugular 2 (3) Scene» [7, 8, 11]. Такая же мето-дика используется для кодирования цвета иллюминанта МКО. Через ко-ординаты цвета X, Y и Z определяют-ся координаты цветности x и у: x = X/ /(X + Y + Z) и y = Y/(X + Y + Z).
3.2. Требование к компьютерному моделированию
Для проведения непротиворечивого и точного анализа необходимо удер-живать входные параметры в реали-стичных рамках реальных условий. Обязательно, чтобы вводимые в ви-
ка N-шаговой визуализации при N=3. Она требует разбиения измеренных спектральных данных на три рав-ных последовательных интервала длин волн (380–510, 515–645 и 650–780 нм). Средние значения R, G и B для каждого из них рассчитываются по методике, описанной в п. 3.2, и ис-пользуются затем для описания цвета. Затем осуществляется визуализация полученных применительно к задан-ным диапазонам длин волн изображе-ний, каждое из которых соответствует отличному от других участку спектра, после чего эти изображения сводят-ся в одно стандартное трёхканальное цветное изображение, что идентич-но формированию в файлах «VRML & Jugular 2 (3) Scene» изображений с расширенным динамическим диа-пазоном (рис. 2).
3.1. Преобразование спектра в пространстве RGB
Приведённый ниже порядок пре-образования спектральных данных в RGB заимствован из статьи [10]. Спектральное распределения коэф-фициента отражения поверхности τ(λ) при помощи соответствующих коло-риметрической системе МКО 1931 функций сложения x(λ), y(λ) и z(λ) преобразуются в координаты цвета X, Y и Z [15]: X = k·∫τ(λ)x (λ)dλ, Y = k·∫τ(λ)y(λ)dλ, Z = k·∫τ(λ)z(λ)·dλ.
Затем эти координаты преобразу-ются в координаты R, G и B посред-ством матрицы преобразования Т (размером 3×3), полученной при по-мощи основных цветов дисплея, как это описано в [3, 4, 6, 15]. Умножая координаты цвета X, Y и Z на Т, полу-чаем координаты R, G и B, которые за-
Рис. 2. Измерение координат цвета в иммерсивной виртуальной реальности. Голова манекена оснащена спектрометром, закрытым трёхмерными (стереоскопическими) очками, позволяющим учитывать поглощение света очками и их окраску при измерении СРЭИ в за-данном направлении наблюдения
Рис. 3. Измеренный в CAVE спектр света, проецируемого зеркалом или через стеклянную стену

«СВЕТОТЕХНИКА», 2012, № 258
ства цвета с помощью программы по п. 2.7. СРЭИ в случае окрашен-ной в белый цвет сцены, наблюдаемой с использованием и без использования стереоскопических очков, были изме-рены с целью исследования влияния стереоскопических очков на восприя-тие цвета наблюдателем (рис. 4). Уве-личение энергии излучения на участке 730–780 нм (рис. 3) обусловлено слу-чайным попаданием пучка ИК излуче-ния, проецируемого системой отсле-живания движения глаз. Приведённые на рис. 4 результаты демонстрируют влияние используемых при наблю-дении сцены стереоскопических оч-ков, наличие которых приводит к яв-ному уменьшению пропускания све-та. Для возможности оценивать вы-бранные смоделированные сцены не только с целью калибровки, но и при-менительно к архитектурному проек-тированию, были рассчитаны насы-щенность цвета, Тц и показатель RMS. Индексы по шкале CQS (100-RMS_Delta Ei * x) масштабировалось так, чтобы можно было наилучшим об-разом поддерживать непрерывность их значений, соответствующих совре-менным лампам. Шкала отрегулиро-вана таким образом, чтобы средние для источников света «F1» – «F12» МКО (CIE 15.2) уровни качества цвета были одинаковыми. Что касается шка-лы 0–100, то индексы по CQS отри-цательные или не большие примерно 20-ти преобразуются посредством не-линейного уравнения так, чтобы ми-нимальное значение этой величины было равно нулю (то есть шкала CQS простирается от 0 до 100). Это не вли-яет на индексы по CQS, большие 30. Результаты расчётов ИЦП, Тц и индек-сов по CQS приведены в таблице.
Одновременное проецирование цветов R, G и B, соответствующих разным сформированным в CAVE сте-нам, позволяет измерять результаты одновременного воздействия разноц-ветных стен на глаз наблюдателя. Рас-чётные индексы по CQS и показате-ли насыщенности цвета (saturation factor) демонстрируют степень из-менений этих цветов, обусловлен-ных подобным способом наблюде-ния. Наблюдаемые различия по ИЦП, Тц и индексам по CQS показывают, что они вызваны изменениями пара-метров, ограничениями, накладыва-емыми на интенсивности ИС (про-екторов), и цветами, формируемыми в данном виртуальном пространстве.
G и B. Использование в качестве вход-ных данных усреднённых значений R, G и B может влиять на точность цветопередачи смоделированной сце-ны. Входные данные для VRML долж-ны содержать следующие сведения об используемых в рассматриваемой сцене материалах: диффузные цве-товые характеристики (R, G и B), ин-тенсивность наружного освещения (от 0 до 1), зеркальные цветовые ха-рактеристики (R, G и B), блеск (от 0 до 1) и прозрачность (от 0 до 1) [7, 8]. Оптические характеристики различ-ных материалов и их угловые зависи-мости были измерены и преобразова-ны в значения R, G и B, которые затем в соответствии с рекомендованной ра-нее процедурой использовались в ка-честве входных данных. Некоторые из упомянутых выше сведений, напри-мер, прозрачность, не учитываются в случае программного обеспечения для внутреннего пользования.
4. Результаты
Пример измеренных СРЭИ проек-торов и сформированных в CAVE по-верхностей стен приведён на рис. 3. Соответствующие данные были от-форматированы и нормализованы от-носительно пиковой длины волны в диапазоне 380–780 нм и использо-вались в качестве входных данных для осуществляемого анализа каче-
емые в реальном масштабе времени сцены показаны так, как они видны наблюдателю. Имеющие известные значения R, G и B простые поверхно-сти моделируются как часть процес-са калибровки проекционной системы применительно к свету, проходящему сквозь задний экран с проецируемы-ми на нём диффузными прозрачными поверхностями.
3.3. Моделирование материалов (в том числе оконных) с помощью VRML
В случае поверхностей интерьера, в том числе стеклянных, основные ха-рактеристики материалов поверхно-стей и их цветовое восприятие фор-мируются на основе спектральных распределений коэффициентов отра-жения и пропускания этих материа-лов. Некоторые из программ не по-зволяют вообще или реалистично мо-делировать диффузное и зеркальное отражение и пропускание света по-верхностными слоями. В основе про-изводимых в рамках компьютерной графики расчётов часто лежит цве-товое пространство RGB. Визуали-зирующее программное обеспечение осуществляет расчёт координат цвет-ности в пространстве RGB. Если ИС излучает во всей области спектра, то моделирующие программы обычно используют усреднение координат R,
Рис. 4. СРЭИ, измеренные при использовании стереоскопических очков и без них

«СВЕТОТЕХНИКА», 2012, № 2 59
а в остальных невелик. Эта конкрет-ная сцена была смоделирована по ал-горитму визуализации с реально-временной демонстрацией теней и заливающего света. При этом алго-ритм [16] и ряд разработанных нами программ позволили использовать возможности современного графиче-ского оборудования с программами построения теней (GLSL-шейдерами).
Цвет поверхности измеряется при помощи спектрофотометра, позволя-ющего выявлять незаметные для че-ловеческого глаза цветовые различия. Некоторые данные использовались нами для определения диапазона из-
ности глаза и качестве цветопередачи в условиях дневного и сумеречного зрения при наличии присущих CAVE ограничений. Новейшие данные ясно указывают на возможность проведе-ния измерений в этих условиях.
На рис. 7 приведено изображение установки, в которой были получены представленные на рис. 6 результаты (оно соответствует одной из смоде-лированных сцен или одному из вре-менных интервалов и демонстриру-ет отражение синего света от синего флага). Полученный результат гово-рит о том, что в синей области спек-тра коэффициент отражения высок,
В приведённом на рис. 5 примере расчётные цвета не вполне соответ-ствуют реальным из-за ограниченно-сти возможностей воспроизведения. Непрерывная красная линия соответ-ствует СРЭИ проектора; кроме того, на рисунке показано цветовое про-странство LAB МКО.
СРЭИ измерялись, когда прибор был поочерёдно направлен на синюю, зелёную и красную стены. Наличие заметного вклада красной, зелёной и синей составляющих уменьшает влияние боковых стен другого цве-та на измерительную головку с коси-нусной коррекцией и 180-градусным полем зрения. Имеются и некоторые многократные отражения между сте-нами, определяемые размерами CAVE. Для лучшей демонстрации этого явле-ния были измерены СРЭИ и его дина-мические изменения, вызванные смо-делированной отражённой составля-ющей, появляющейся при перемеще-нии синего флага в пределах сцены; целью этих измерений было опреде-ление соответствующей рассматри-ваемой сцене чувствительности (или пределов области поддающихся изме-рению отражений) и энергетической освещённости на глазах наблюдателя. На рис. 6 показаны соответствующие различным направлениям наблюдения или временным интервалам СРЭИ от-ражений, анимированных в рамках CAVE. Для более наглядной демон-страции данных длины волн были со-знательно ограничены диапазоном 430–500 нм. Исследования, проводи-мые в настоящее время в рамках вир-туальной реальности, сконцентриро-ваны на спектральной чувствитель-
Рис. 5. Пример результатов расчётов индексов цветопередачи по шкалам CQS и CRI, проведённых с использованием СРЭИ фронталь-ного проектора
Рис. 6. Измеренный спектр отражённого синего света для разных углов наблюдения

«СВЕТОТЕХНИКА», 2012, № 260
скания и спектральных характеристик материалов (см. п. 2.7). С помощью измерений, выполняемых с исполь-зованием спектрофотометра, и по-следующего представления результа-тов в виде «спектральных» графиков можно демонстрировать работу раз-личных моделей визуализации, по-зволяющих путём спектральных из-мерений в реальных и лабораторных условиях выявлять несколько слоёв сложного материала или сложной тек-стуры. Осуществляемая в CAVE визу-ализация при одновременном изме-рении этих физических параметров требует полного удовлетворения тре-бований промышленных и междуна-родных стандартов [17].
5. Анализ и обсуждение
Целью данной работы было иссле-дование поддающейся измерению об-ласти цветовых различий в моделиру-ющей реальность виртуальной среде, обеспечивающей создание реальных зрительных ощущений. Специальные приборы позволяют пользователям измерять ощущаемую ими динами-ку света и цвета. Заданный заранее
торых спектральные данные соответ-ствуют имеющемуся программному обеспечению. Для моделирования и имитации цвета требуются знания коэффициентов отражения и пропу-
менения яркости в пределах сцены при заданном сценарии и предпола-гаемых значениях фоновой яркости. Этот подход эффективен при условии использования моделей цвета, в ко-
Таблица
Результаты расчётов по измеренным СРЭИ показателей качества цветопередачи
Тц, К DuvИЦП по CRI LER*,
лм/Вт
ИЦПпо
CQS
15 образцов
цвета
Показатель насыщенности
ССТ factor** RMS Шкала
0–100Ra R (9–12) R9
Естест. освещение
5183 0,0095625 95 90 73 250 95 95 95 95 95 95
Проецирую-щее зеркало, среднее
5482 -0,0011292 92 85 57 197 96 94 96 96 96 96
Стена, среднее 5547 0,004568 94 83 66 218 94 93 94 94 94 94
Фронтальный проектор
5490 -0,0011602 92 85 57 197 96 94 96 96 96 96
Передняя стена 5203 -0,0065893 90 82 49 188 96 92 96 96 96 96
Без очков 01 4950 -0,009572 89 78 46 184 95 92 95 95 95 95
Без очков 02 4944 -0,0095659 89 79 46 184 95 92 95 95 95 95
С очками 01 5153 -0,0100027 88 76 44 180 95 90 95 95 95 95
С очками 02 5281 -0,0085146 89 77 44 179 95 91 95 95 95 95
Синяя стена 5836 -0,0194491 80 54 3 153 89 82 89 89 89 89
Зелёная стена 5123 0,0024101 94 88 89 186 94 93 95 95 94 94
Красная стена 4012 -0,0233137 82 59 29 159 90 84 90 90 90 90
* LER (Luminous Effi cacy of Radiation) = отношению световой отдачи к полному потоку излучения ИС.** Коэффициент коррелированной цветовой температуры.
Рис. 7. СРЭИ анимированной в CAVE сцены, измеренное в реальном масштабе времени

«СВЕТОТЕХНИКА», 2012, № 2 61
шать в виртуальном мире. Чем выше качество и реалистичность соответ-ствующего заданному проектному ре-шению изображения, тем полнее оно отражает реальные процессы и тем довольнее пользователи. В то же вре-мя есть применения, в которых про-ектирование не предполагает высо-кой точности моделирования – тогда от этого метода не требуется абсолют-ной точности, которой можно пожерт-вовать в пользу ускорения процесса принятия решений. Информация, пре-доставляемая полученными результа-тами и их анализом, может помогать формулировать последовательность действий или требования при модели-ровании яркости в случае наружного освещения и освещённости в случае внутреннего освещения. Результаты данного исследования по виртуаль-ному моделированию демонстрируют предельные возможности и точность современных алгоритмов при извест-ных динамических диапазонах пря-мых и отражённых светотехнических параметров в случаях формируемых в CAVE простых и сложных внутрен-них пространств. Возможность учёта физических свойств материалов спо-собствует применению визуализации и прогнозированию соответствующих каждой смоделированной сцене усло-вий освещения или воспринимаемых цветов. Использование формируемых в CAVE изображений может служить альтернативой использованию реаль-ного или полностью сымитированно-го пространств при оценке проектных решений.
стандартные настройки программного обеспечения, проектировщики с неко-торым опытом в компьютерной гра-фике могут моделировать требуемые условия освещения без точного опре-деления координат цвета цветовых стимулов. Известно не так уж много целевых пакетов программ, позволяю-щих немедленно получать желатель-ные и точные результаты без пони-мания законов колориметрии и соот-ветствующих математических моде-лей. С другой стороны, архитекторы считают необходимым давать своим клиентам возможность в полной мере использовать как современные воз-можности визуализации, так и лите-ратурные данные и прочие доступные через Интернет образовательные ма-териалы, чтобы пользователи понима-ли, как формируются цвета поверхно-стей и что влияет на восприятие ими цветов и характеристик поверхностей, выбранных проектировщиками.
6. Итоговые замечания и выводы
Виртуальная реальность уже не рассматривается только как развлече-ние: благодаря предоставляемым ею возможностям в части визуализации она в настоящее время применяется и в научных исследованиях. Некото-рые возникающие при проектирова-нии освещения проблемы можно ре-
или случайный путь через иммерсив-ное виртуальное архитектурное про-странство позволяет пользователю из-мерять в реальном масштабе времени как характеристики освещения, соз-дающие определённое цветовое вос-приятие, так и влияние изменений спектра.
Из рис. 7 видно, как поверхность флага отражает свет в синей области спектра. Затем конкретная сцена фик-сируется цифровой фотокамерой, ка-либрованной для измерения распреде-ления яркости (рис. 8).
Реакции пользователя на темно-ту, яркость и цвет сцены и динами-ку спектра дают возможность кор-реляции динамического диапазона зрительного восприятия с его жела-тельными или спроектированными характеристиками, измеримыми в ре-альном масштабе времени. В созда-ваемых сценах моделируются чув-ствительность зрения и полное или ограниченное поле зрения (биноку-лярного или фовеального). Для обе-спечения повторяющихся условий проверки зрительной работы в соз-даваемой компьютером виртуальной среде моделируются различные сце-ны с равными или разными ИЦП или сложно распределённой цветностью. Создание реалистичной сцены и без полного понимания колориметриче-ских особенностей уравнивания цве-тов – довольно просто. Используя
Мойтаба Навваб (Mojtaba Navvab), Ph.D.
Преподаватель
Колледжа
архитектуры
и градостроительства
им. А.А. Таубмана
Мичиганского
университета. Член Североамериканского
светотехнического общества (IESNA)
и международного.редсовета журнала
«Lighting Research and Technology». Лауреат
ряда премий IESNA и Американского
института архитектуры (AIA)
Рис. 8. Измеренное распределение яркости, вызванное отражённым синим светом