Embed Size (px)
Citation preview
Linear approach of the levelset function in XFEM
Linear approach of the levelset function in
XFEM
M.A.C. Thurlings MT 09.41
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 2
Foreword
This report is the result of the final bachelor project ‘BEP’ of M.A.C. Thurlings. The
project started on the September 31st, 2009 and ended on November 6
th, 2009. With
this report the author wants to show he is capable to do research and solve an
academic problem and thereby able to finish the bachelor at the technical university of
Eindhoven. The project was very well coached by dr. ir. P.D. Anderson and dr. ir.
M.A. Hulsen.
In the past weeks the student learned about Fortran and TFEM (Toolkit for Finite
Element Method) and some recent developments in XFEM (eXtended Finite element
method). In the process of creating the algorithm he improved his programming skills
and knowledge about finite element methods. The results are very acceptable to
continue the research on this subject.
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 3
Summary
The Finite Element Method (FEM) programs are relative new programs to solve both
simple and complex problems. New techniques are still developed to improve the
programs. A Toolkit for FEM (TFEM) is developed at the TU/e to test new
techniques.
Tests are done in TFEM to check what 2D element is best used for linear problems. It
appeared to be the quad-9 element. This element preformed best in a minimal error
and short CPU-time. With complex geometry triangle-6 elements might have
advantage.
The main goal of the research is to create a new algorithm that determines the levelset
function in an xfem program, a component of TFEM. Originally this is done with
exact formulas and solid objects. When complex shapes or time depended shapes are
used, there are no exact formulas available. A direct approach to the levelset function
is developed to cope with this problem.
The signed distance function determines the shortest distance from a given point
(usually a node in a mesh) to an object. Not only does it provide the distance but also
if this point is inside or outside the object. This is done by a sign. When the point is
inside the object the distance gets a negative sign. When it is outside it stays positive.
The signed distance function is a levelset function.
An algorithm is developed in Matlab to determine the levelset function using a linear
approach of. It uses a set of coordinates on the interface of the object to determine the
distance and sign. The levelset function is determined with distances and vectors
between known coordinates. The coordinates have to be arranged counterclockwise as
usual in fem programming.
The algorithm is tested in Matlab. The sign is determined correctly with distances as
close as the machε number to the object. An expected error in the distance exists,
because of the linear approach of the object. This error decreases as expected with the
second order for a nonlinear object with an increasing number of object coordinates.
The algorithm is implemented in the original xfem2 program from TFEM and tested.
The accuracy of the program depends on the number of object coordinates indicated
with k. They can be increased. The result of the original program is not constant for
different values of k. This is a result of an error in dividing the elements.
When the number of object coordinates is larger than 640, the program showed almost
identical results as the original program. The CPU-time for building the mesh
increased with about 6%. When other shapes are introduced the program is capable to
deal with this geometry and produce accurate results.
When a ‘nodelem’ is generated beside the ‘topology’ they can be used in calculating
the levelset function. It is not implemented in the algorithm. This is useful when the
object coordinates change in time and are no longer arranged counterclockwise.
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 4
Table of content
Linear approach of the levelset function in XFEM ............................................................ 1
Foreword ............................................................................................................................. 2
Summary ............................................................................................................................. 3
Table of content .................................................................................................................. 4
Introduction......................................................................................................................... 5
1. Learning TFEM .......................................................................................................... 6
Number of elements ........................................................................................................ 6
Changing the geometry ................................................................................................... 8
Changing the equation .................................................................................................... 9
2. First version of the linear approach in 2D ................................................................ 10
The sign......................................................................................................................... 10
The distance .................................................................................................................. 12
Tests .............................................................................................................................. 14
3. Improved linear approach in 2D ............................................................................... 16
Redeveloping distance .................................................................................................. 16
Sign for point to object coordinate................................................................................ 16
Tests .............................................................................................................................. 18
4. XFEM ....................................................................................................................... 19
Increasing object coordinates........................................................................................ 19
CPU-time ...................................................................................................................... 20
Other shapes.................................................................................................................. 21
5. Conclusion and recommendation.............................................................................. 22
6. Literature................................................................................................................... 23
7. Appendix................................................................................................................... 24
A Adjustments in the program for the Poisson equation. ......................................... 24
B Result for changing geometry and equation ......................................................... 25
C Program test 1 ....................................................................................................... 28
D Program test 2 ....................................................................................................... 30
E Program test 3 ....................................................................................................... 31
F Improved program ................................................................................................ 33
G Testresult improved program................................................................................ 35
H Program in XFEM................................................................................................. 37
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 5
Introduction
Improve and test programs in finite element method (FEM), is difficult in the
commercial programs. A program called ‘a Toolkit for Finite Element Method’
(TFEM) is designed to develop new FEM programs. In TFEM an add-on is present
that is called XFEM. This is a new tool to solve a special kind of problem which
occurs in many situations. When a problem exists from more than one material or an
complex shaped object in a field this is hard to solve with the standard finite element
methods. XFEM provides a solution to this problem. A good example is given in the
TFEM user guide [1]
section 11.18.
The programs xfem1 and xfem2 described in the TFEM user guide [1]
section 11.18,
solve the problem by subdividing the elements on the interface of an object and
deleting elements inside the object. For the program to know which elements should
be deleted and which elements are to be divided, the program uses a levelset function.
In order to obtain an accurate subdivision the levelset function needs to be smooth
near the interface. The levelset function consists of a signed distance from the nodes
to the interface. The sign determines if the node is inside the object or outside. For a
levelset function < 0, the node is inside the object, levelset function = 0, the node lies
on the interface, and for levelset function > 0, the node lies outside the object. To
determine the levelset function, the exact formula of a circle is used.
In case different shapes or even time-dependent shapes are used, it is very difficult to
use exact formulas. It is clear that a new method has to be developed to solve this
problem. In an XFEM program a set of coordinates that describe the object’s interface
is easily created. These coordinates can be used to determine the levelset function. To
calculate an accurate levelset function, a linear or even quadratic approach has to be
developed.
To get a better grip on the program at first a small project will be done. It will be
investigated what element type is best used in a relatively simple example. The
maximum error and cpu-time will be reported. After this quick project the actual
levelset function will be described.
After these experiments an algorithm will be developed to determine the levelset
function. In this report an algorithm for two dimensional problems is developed. After
creating the first form of the algorithm, test will occur to find the weaknesses and
errors. Improved algorithms will be created and tested. Finally the algorithm will be
implemented in the original xfem programs and than tests will be done.
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 6
1. Learning TFEM
The first part of the project is assigned to understand more about TFEM. This
program gives the opportunity to experiment with new developed methods in finite
element methods. The program is written in the computer language FORTRAN 95.
The Poisson equation can be approached by the program written in Paragraph 2.1.2 in
the TFEM user guide [1]
. This program gives the biggest absolute difference between
the real and the approximated solution. In this program, a number of elements are
defined. In case this number is adjusted the maximum error will change. This error
can be written as a function of the number of nodes with the unknown u.
In TFEM different element types can be used, even different kinds in one program.
This program uses the standard QUAD-9. These are square elements with 9 nodes.
Other two dimensional element types are QUAD-4, TRIANGLE-3 and TRIANGLE-
6.
Number of elements
In this first assignment the Poisson equation on a unit square with Dirichlet
boundary’s is determined. The equation [1-1] is used. fu =∇2 is addressed on the
boundary’s.
( ) ( )ππ ∗∗∗+= yxu coscos1 [1-1]
An increasing number of unknown degrees of freedom will be introduced and
checked what consequences this has for the maximum error for these 4 different
elements. It is also interesting to check the CPU-time. In case of very large programs
with large amounts of unknown degrees of freedom and complex geometry it could
take days to run a program. It is important to get the most accurate possible answer
with the smallest CPU-time. All element types will be tested on these requirements
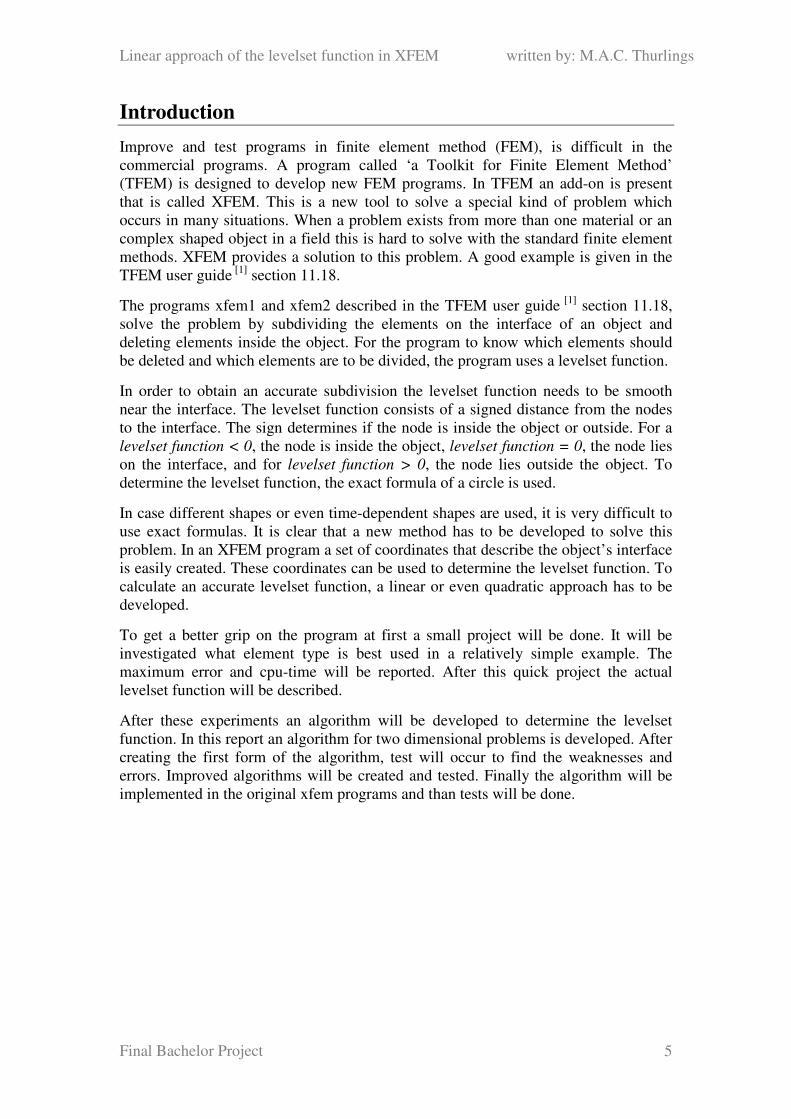
The accuracy and CPU-time can easily be extracted from the program. When adding
lines to the program it is possible to generate a list with the data. These lines can be
found in the Appendix A. The terminal generates a list with the number of unknown
nodes, the maximum error and the CPU-time. This date is plotted in the Figure 1.1
and Figure 1.2.
This is a part of the original program for QUAD-9 where this element type is defined:
20 uintpl = 8, & ! sclar interpolation
21 gauss = 3, & ! 3x3 integration of quads
22 gaussb = 3, & ! 3 point integration of boundary elements
57 meshgen_options%elshape = 6
69 input_probdef%elementdof(1)%a = (/1,1,1,1,1,1,1,1,1/)
To generate the data for the other element types a couple of adjustments are required.
The ‘uintpl = 8’ is changed for TRIANGLE-3 to two, for QUAD-4 to four and for
TRIANGLE-6 tot six. In case of linear elements, TRIANGLE-3 and QUAD-4, the
‘gauss’ and ‘gaussb’ is set to two. These elements are linear, using five point Gauss
integration is useless. three point Gauss integration is used instead. At line 57 the
element type is determined. The correct values are found in Paragraph 4.2 of the
TFEM user guide [1]
. In line 69 the number of degree of freedom for each node is
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 7
determined. This is ‘one’ for all nodes of an element type. For TRIANGLE-3 there
are three ones required and so on. The data for these other three element types are
plotted in the Figure 1.1 and Figure 1.2.
1,00E-11
1,00E-10
1,00E-09
1,00E-08
1,00E-07
1,00E-06
1,00E-05
1,00E-04
1,00E-03
1,00E-02
1,00E-01
10 100 1000 10000 100000 1000000
#dof
Err
or
Triangle, 3 nodes Triangle, 6 nodes Quad, 4 nodes Quad, 9 nodes
Figure 1.1 Error versus number of unknown dof
As show in Figure 1.1, the quadratic elements give more accurate results than the
linear elements. The Poisson equation gives a nonlinear solution. For this reason the
quadratic elements give much better results. The QUAD elements give better results
than the TRIANGLE shape elements, because the unknown nodes in QUAD’s are
calculated with more known nodes. Figure 1.1 shows that the error drops wit a first
order for linear elements and second order for quadratic elements.
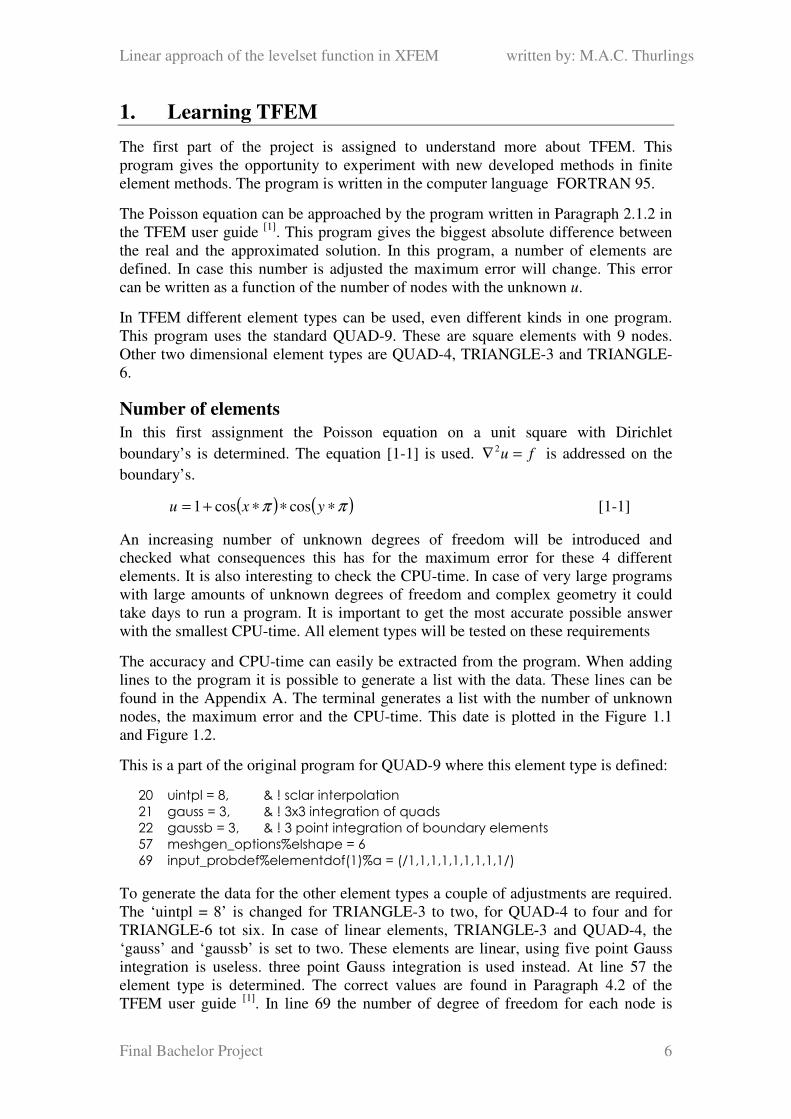
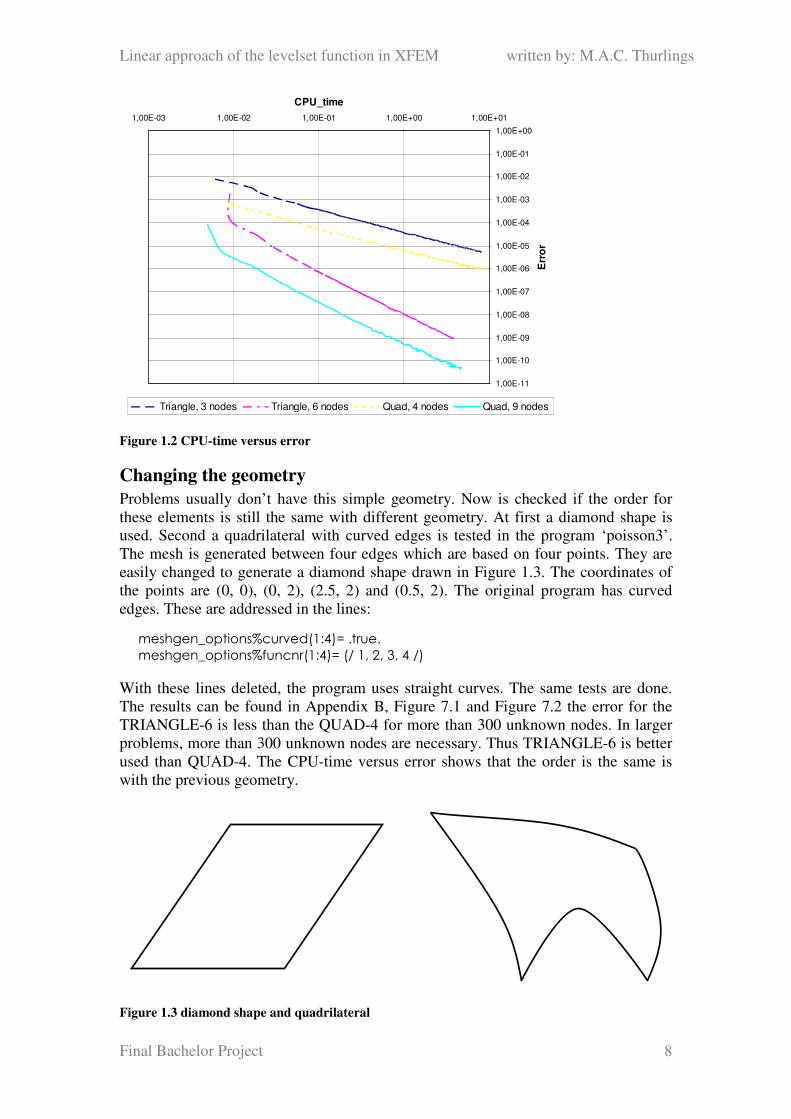
In Figure 1.2 the CPU-time and error are plotted. In this log-log graph there is
nonlinearity. This is most likely because other small processes run on the computer
which uses CPU-time. Figure 1.2 shows that there is a similar order between the
different elements for the CPU-time versus error as for the number of unknown
degrees of freedom versus the error. The QUAD-9 elements give the best results for a
nonlinear problem. So where possible these elements should be used. Only when the
geometry gives advantage to TRIANGLE elements, TRIANGLE-6 should be used.
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 8
1,00E-11
1,00E-10
1,00E-09
1,00E-08
1,00E-07
1,00E-06
1,00E-05
1,00E-04
1,00E-03
1,00E-02
1,00E-01
1,00E+00
1,00E-03 1,00E-02 1,00E-01 1,00E+00 1,00E+01
CPU_time
Err
or
Triangle, 3 nodes Triangle, 6 nodes Quad, 4 nodes Quad, 9 nodes
Figure 1.2 CPU-time versus error
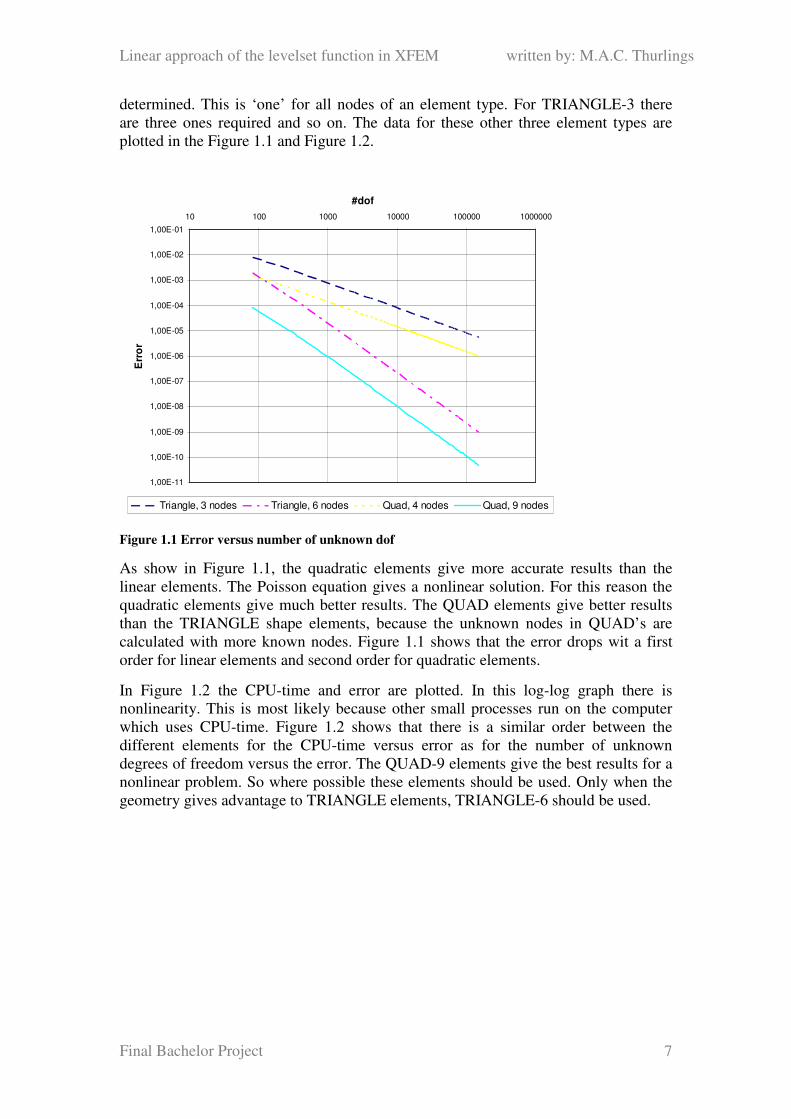
Changing the geometry
Problems usually don’t have this simple geometry. Now is checked if the order for
these elements is still the same with different geometry. At first a diamond shape is
used. Second a quadrilateral with curved edges is tested in the program ‘poisson3’.
The mesh is generated between four edges which are based on four points. They are
easily changed to generate a diamond shape drawn in Figure 1.3. The coordinates of
the points are (0, 0), (0, 2), (2.5, 2) and (0.5, 2). The original program has curved
edges. These are addressed in the lines:
meshgen_options%curved(1:4)= .true.
meshgen_options%funcnr(1:4)= (/ 1, 2, 3, 4 /)
With these lines deleted, the program uses straight curves. The same tests are done.
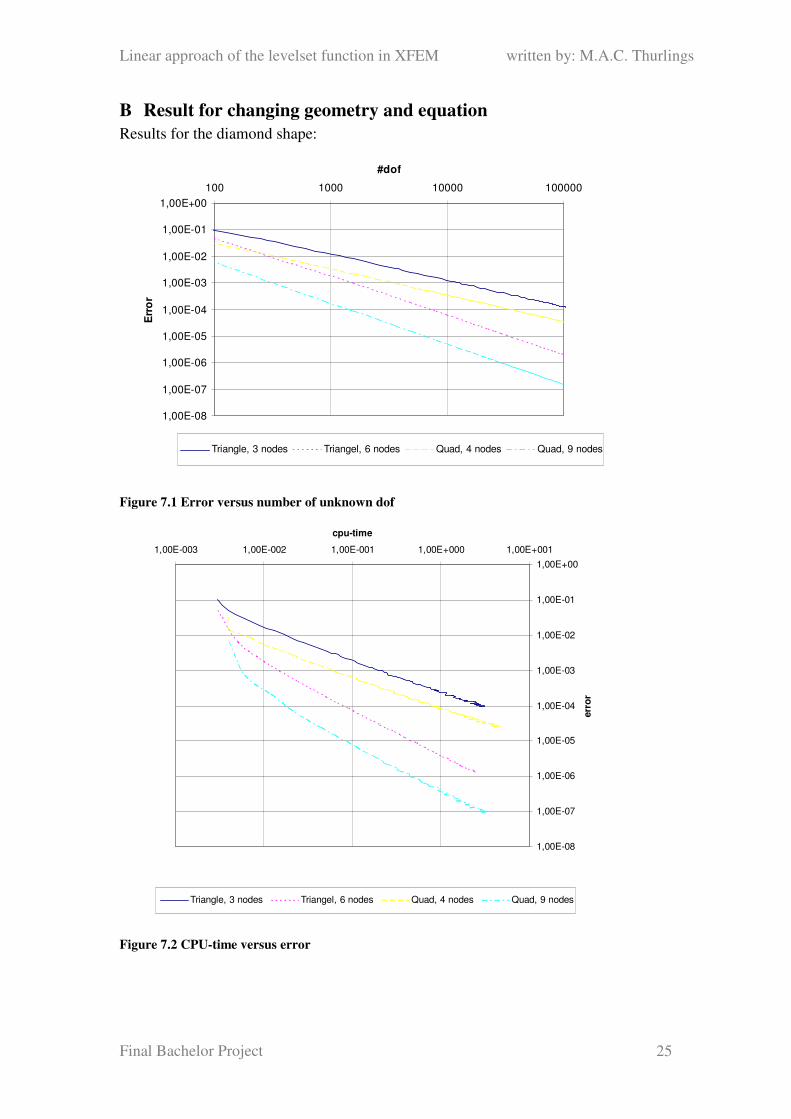
The results can be found in Appendix B, Figure 7.1 and Figure 7.2 the error for the
TRIANGLE-6 is less than the QUAD-4 for more than 300 unknown nodes. In larger
problems, more than 300 unknown nodes are necessary. Thus TRIANGLE-6 is better
used than QUAD-4. The CPU-time versus error shows that the order is the same is
with the previous geometry.
Figure 1.3 diamond shape and quadrilateral

Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 9
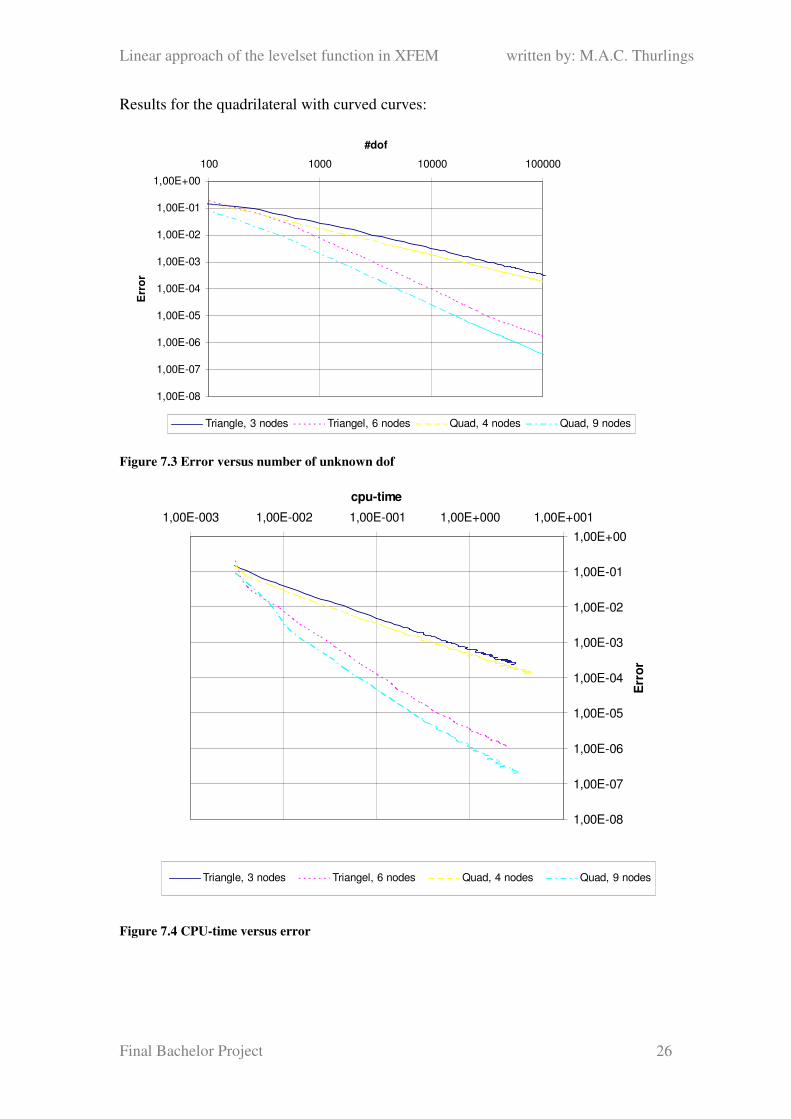
Now the two lines deleted before are placed back. The four edges are now curved, so
the form is a quadrilateral drawn in Figure 1.3. The results are found in Appendix B,
Figure 7.3 and Figure 7.4. The order of the results is the same as before but there is a
difference. In the previous test the difference between the quadratic elements was
about one decade for the error versus number of unknown dof and CPU-time versus
error. But for this problem the lines lie twice as close to each other on the logarithmic
scale. Also the lines of the linear elements lie twice as close to each other. This effect
might be caused by the integration which could be slower for QUAD-elements for this
geometry.
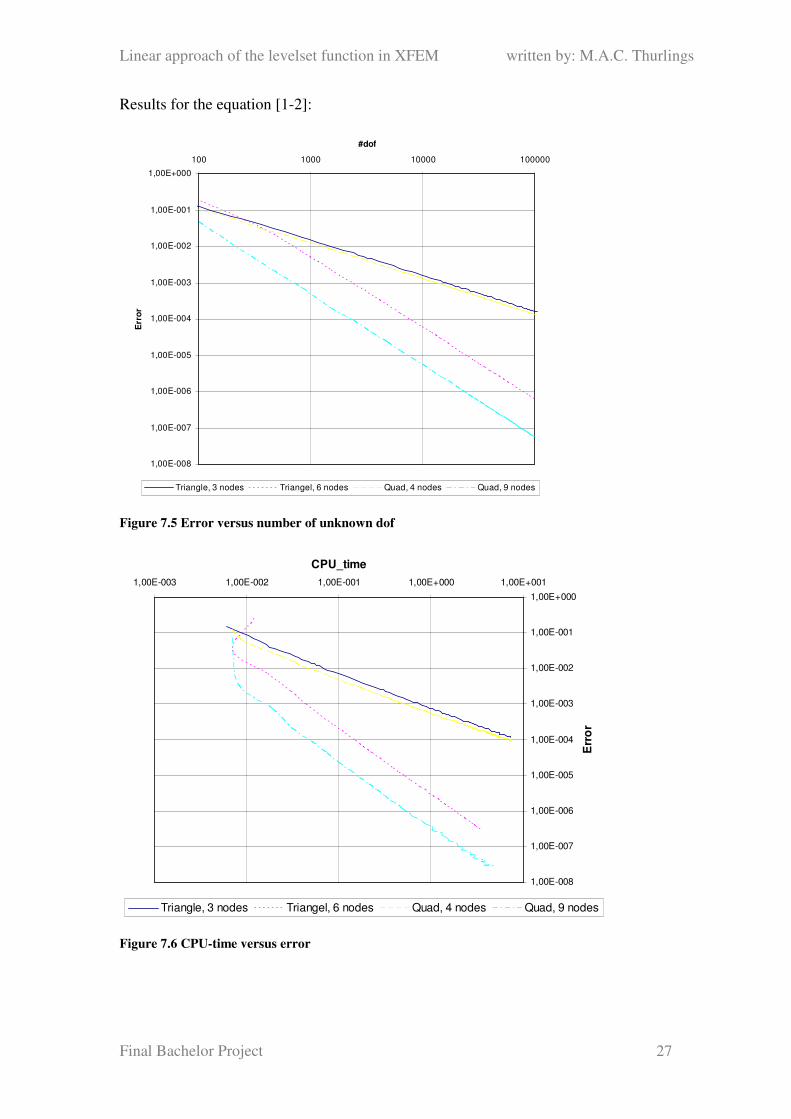
Changing the equation
In the first two parts the equation [1-1] is solved. Now a different equation [1-2] in
introduced and checked what influence it has on the tests. The second order deviation
is applied on the boundaries which is [1-3]
( ) ( )ππ ∗∗∗∗∗+= yxu 4sin4sin1 . [1-2]
( ) ( )πππ ∗∗∗∗∗∗=∇− yxu 4sin4sin32 22 [1-3]
The results of this equation are found in Appendix B, Figure 7.5 and Figure 7.6. They
are similar to the other problems. Other equations have little influence on which
element is best used.

Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 10
2. First version of the linear approach in 2D
A linear approach for a two dimensional problem will be developed. This is expected
to be less complicated to develop than a quadratic approach. Developing this approach
consist of two main parts. At first the method to determine the sign will be developed.
Second a way to determine the distance is developed. It would be useful if this
program is easily adjustable for 3D problems.
The sign
On the internet [2]
and in the TFEM user guide [1]
three ways to determine the sign
were found.
1) From a point in the mesh, a line to infinite or in case of FEM, to the end of the
mesh is determined. This line will cross the object interface an even or odd
time. If it is even, the point is outside the object, and if it is odd, the point is
inside the object. The risk of this method is on nodes, where two lines come
together. When not well defined, the program will count two crossings at the
nodes.
2) When a function ( )0xr
φ is given, with values on a finite number of points,
interpolation can be used to approach the value of ( )0xr
φ on unknown points.
This method is not useful because the values on the points are not given.
3) This idea is illustrated in Figure 2.1 where n = 5. When the sum of the angles
∑=
n
i
i
1
ϕ is equal zero, the point is outside the object. When this is π2± the
point is inside the object. The ± sign depends on the way the object
coordinates are arranged. For a large number of object coordinates numerical
errors will occur.
Figure 2.1 Sum of angles
The third method is easy to develop in numerical programs. So this method will be
used. The cosines-rule [2-1] can be used to determine the angles. The value’s, a, b and
c are shown in Figure 2.1. It uses the distances between the point and the object
coordinates and the distance between the neighboring object coordinates. They can
easily be determined.
( )ab
cba
2cos
222 −+=α [2-1]
2ϕ
1ϕ 3ϕ
4ϕ
5ϕ
1ϕ
2ϕ
3ϕ
4ϕ
5ϕ
a
b
c

Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 11
The equation has a bad side-effect. The cosines-rule does not determine if the angle is
clockwise or counter clockwise. To determine the direction of the individual angles a
form of the inner product can be used. The normal of the plane, spanned by the two
vectors, (point to objectcoordinate-i) and (point to objectcoordinate-i+1) is either in the
positive z-direction or in the negative z-direction. When it is in the positive z-
direction the angle calculated with the cosines-rule is added to the total angles,
otherwise it is subtracted from the total angles. This leads to the following program in
Matlab format.
% objectcoor are a finite number of x and y coordinates from the object
% these coordinates have to be neighboring in the geometry of the object
% p is the point to which the shortest distance is to be determined
function [shortest_dist] = kortste_afstand_lineair (objectcoor, p)
%% list with distances from the point to all object coordinates
for n = 1 : size(objectcoor,1)
l(n) = sqrt((p(1)-objectcoor(n,1))^2 + (p(2)-objectcoor(n,2))^2);
end
l = l';
%% determine total angle
somhoek = 0;
for i = 1:(size(l,1))
if i > size(l,1)-1
j = 1;
else
j = i + 1;
end
dist1 = l(i);
dist2 = l(j);
z = ( objectcoor(i,1)-p(1) )*( objectcoor(j,2)-p(2) ) - ( objectcoor(i,2)-p(2) )*(
objectcoor(j,1)-p(1) );
tdist= sqrt( (objectcoor(i,1)-objectcoor(j,1))^2 + (objectcoor(i,2)-
objectcoor(j,2))^2);
hoek = acos( (dist1^2 + dist2^2 - tdist^2) / (2*dist1*dist2) );
if z < 0
hoek = -hoek;
end
somhoek = somhoek + hoek;
end
absol_deel_hoek = abs(2*pi - abs(somhoek));
%% determine sign
if absol_deel_hoek < 1e-5
%inside object
teken = -1;
else
%outside object
teken = 1;
end
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 12
The program continuous, at this part the sign can be determined. Depending on the
position of the point and the objects geometry there is a small error in the results.
Thus if the ‘absol_deel_hoek < 1e-5’ the sign is negative, if not the sign is positive.
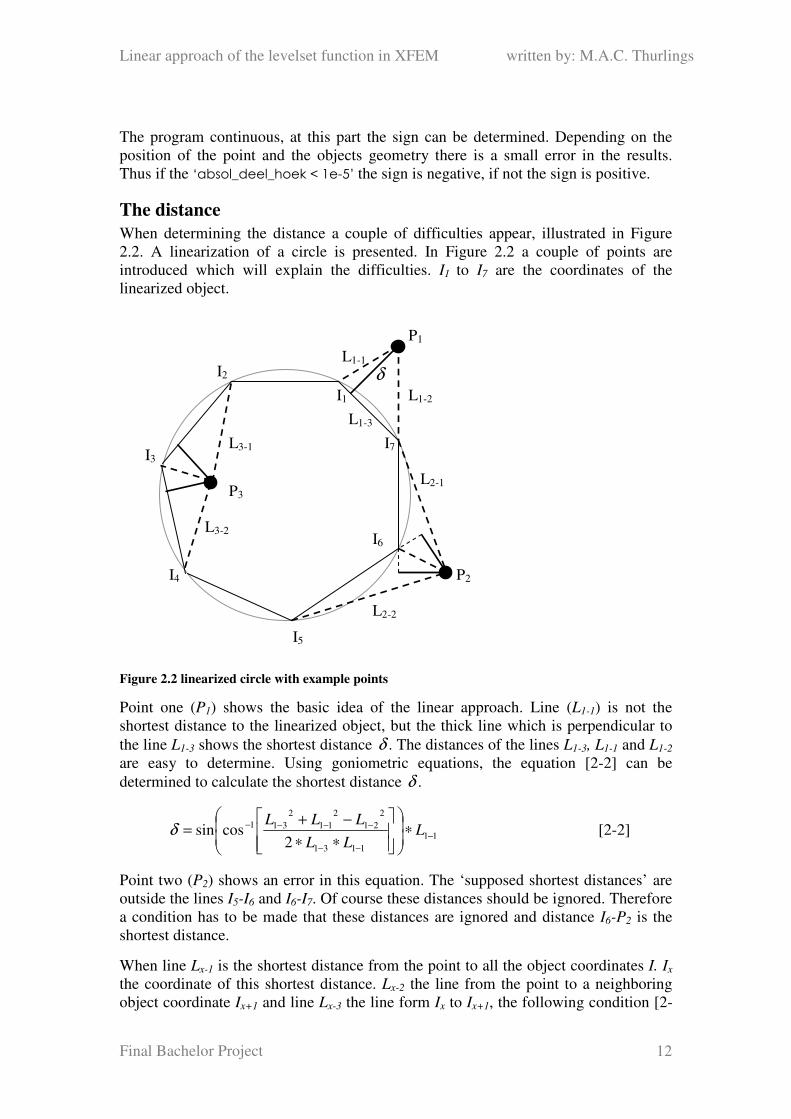
The distance
When determining the distance a couple of difficulties appear, illustrated in Figure
2.2. A linearization of a circle is presented. In Figure 2.2 a couple of points are
introduced which will explain the difficulties. I1 to I7 are the coordinates of the
linearized object.
Figure 2.2 linearized circle with example points
Point one (P1) shows the basic idea of the linear approach. Line (L1-1) is not the
shortest distance to the linearized object, but the thick line which is perpendicular to
the line L1-3 shows the shortest distance δ . The distances of the lines L1-3, L1-1 and L1-2
are easy to determine. Using goniometric equations, the equation [2-2] can be
determined to calculate the shortest distance δ .
11
1131
2
21
2
11
2
311
2cossin −
−−
−−−− ∗
∗∗
−+= L
LL
LLLδ [2-2]
Point two (P2) shows an error in this equation. The ‘supposed shortest distances’ are
outside the lines I5-I6 and I6-I7. Of course these distances should be ignored. Therefore
a condition has to be made that these distances are ignored and distance I6-P2 is the
shortest distance.
When line Lx-1 is the shortest distance from the point to all the object coordinates I. Ix
the coordinate of this shortest distance. Lx-2 the line from the point to a neighboring
object coordinate Ix+1 and line Lx-3 the line form Ix to Ix+1, the following condition [2-
P2
I3
P3
P1
L3-1
L3-2
L1-2
L1-1
L2-2
L2-1
I6
I7
I1
I2
I4
I5
L1-3
δ
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 13
3] can be made. If this condition is true, the distance δ should be calculated. Else it
should be ignored.
2
2
2
3
2
1 −−− ≤+ xxx LLL [2-3]
Point three (P3) shows the next issue. In some cases it is not directly clear if the
distance to the object coordinate, the perpendicular line before or after this coordinate
is the shortest distance. All three distances should be calculated and the distance
closest to zero is the shortest distance δ .
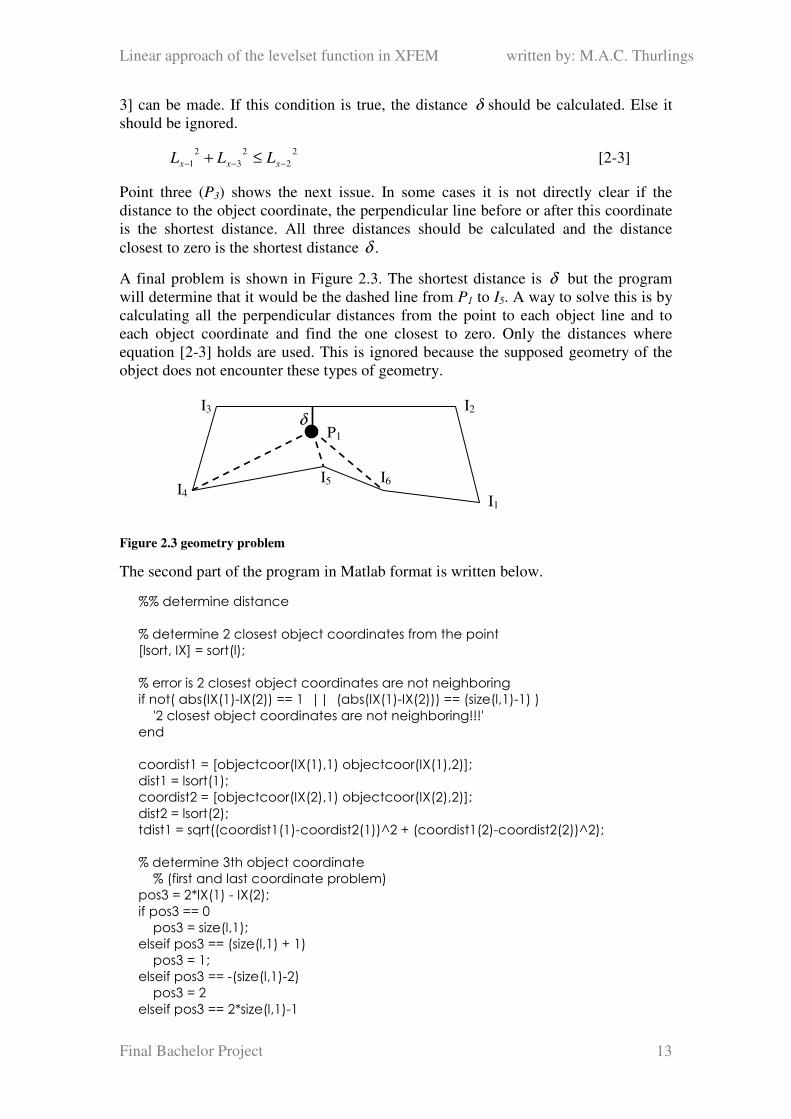
A final problem is shown in Figure 2.3. The shortest distance is δ but the program
will determine that it would be the dashed line from P1 to I5. A way to solve this is by
calculating all the perpendicular distances from the point to each object line and to
each object coordinate and find the one closest to zero. Only the distances where
equation [2-3] holds are used. This is ignored because the supposed geometry of the
object does not encounter these types of geometry.
Figure 2.3 geometry problem
The second part of the program in Matlab format is written below.
%% determine distance
% determine 2 closest object coordinates from the point
[lsort, IX] = sort(l);
% error is 2 closest object coordinates are not neighboring
if not( abs(IX(1)-IX(2)) == 1 || (abs(IX(1)-IX(2))) == (size(l,1)-1) )
'2 closest object coordinates are not neighboring!!!'
end
coordist1 = [objectcoor(IX(1),1) objectcoor(IX(1),2)];
dist1 = lsort(1);
coordist2 = [objectcoor(IX(2),1) objectcoor(IX(2),2)];
dist2 = lsort(2);
tdist1 = sqrt((coordist1(1)-coordist2(1))^2 + (coordist1(2)-coordist2(2))^2);
% determine 3th object coordinate
% (first and last coordinate problem)
pos3 = 2*IX(1) - IX(2);
if pos3 == 0
pos3 = size(l,1);
elseif pos3 == (size(l,1) + 1)
pos3 = 1;
elseif pos3 == -(size(l,1)-2)
pos3 = 2
elseif pos3 == 2*size(l,1)-1
P1
δ
I2 I3
I1
I4
I5 I6
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 14
pos3 = size(l,1) - 1
end
coordist3 = [objectcoor(pos3,1) objectcoor(pos3,2)];
dist3 = l(pos3);
tdist2 = sqrt((coordist1(1)-coordist3(1))^2 + (coordist1(2)-coordist3(2))^2);
% shortest distance
SHORTEST_DIST = [];
SHORTEST_DIST = [SHORTEST_DIST; dist1];
if sqrt(tdist1^2 + dist1^2) <= dist2
shortest_dist1 = dist1;
else
shortest_dist1 = sin(acos((dist2^2+tdist1^2-dist1^2)/(2*dist2*tdist1)))*dist2;
end
SHORTEST_DIST = [SHORTEST_DIST; shortest_dist1];
if sqrt(tdist2^2 + dist1^2) <= dist3
shortest_dist2 = dist1;
else
shortest_dist2 = sin(acos((dist3^2+tdist2^2-dist1^2)/(2*dist3*tdist1)))*dist3;
end
SHORTEST_DIST = [SHORTEST_DIST; shortest_dist2];
shortest_dist_zonder_teken = min(SHORTEST_DIST);
%% sign * distance
shortest_dist = teken * shortest_dist_zonder_teken;
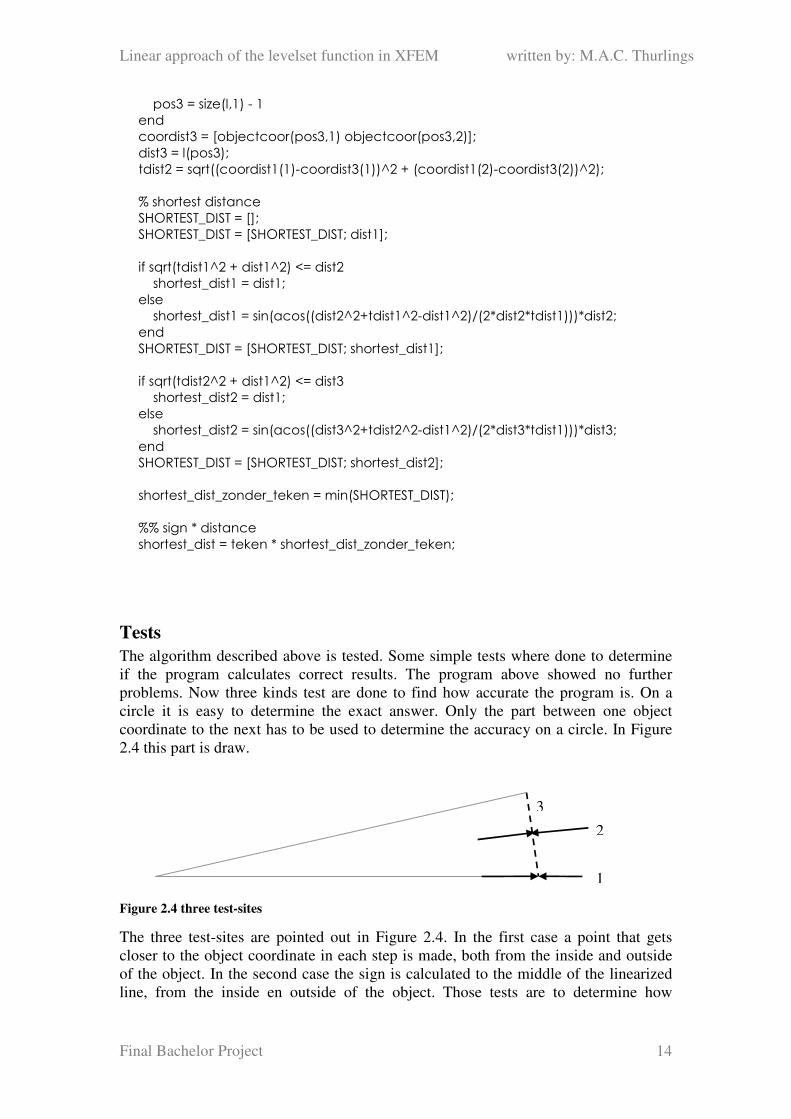
Tests
The algorithm described above is tested. Some simple tests where done to determine
if the program calculates correct results. The program above showed no further
problems. Now three kinds test are done to find how accurate the program is. On a
circle it is easy to determine the exact answer. Only the part between one object
coordinate to the next has to be used to determine the accuracy on a circle. In Figure
2.4 this part is draw.
Figure 2.4 three test-sites
The three test-sites are pointed out in Figure 2.4. In the first case a point that gets
closer to the object coordinate in each step is made, both from the inside and outside
of the object. In the second case the sign is calculated to the middle of the linearized
line, from the inside en outside of the object. Those tests are to determine how
1
2
3
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 15
accurate the sign is calculated. In the third case the maximum error on the linearized
line (the dashed line) is determined.
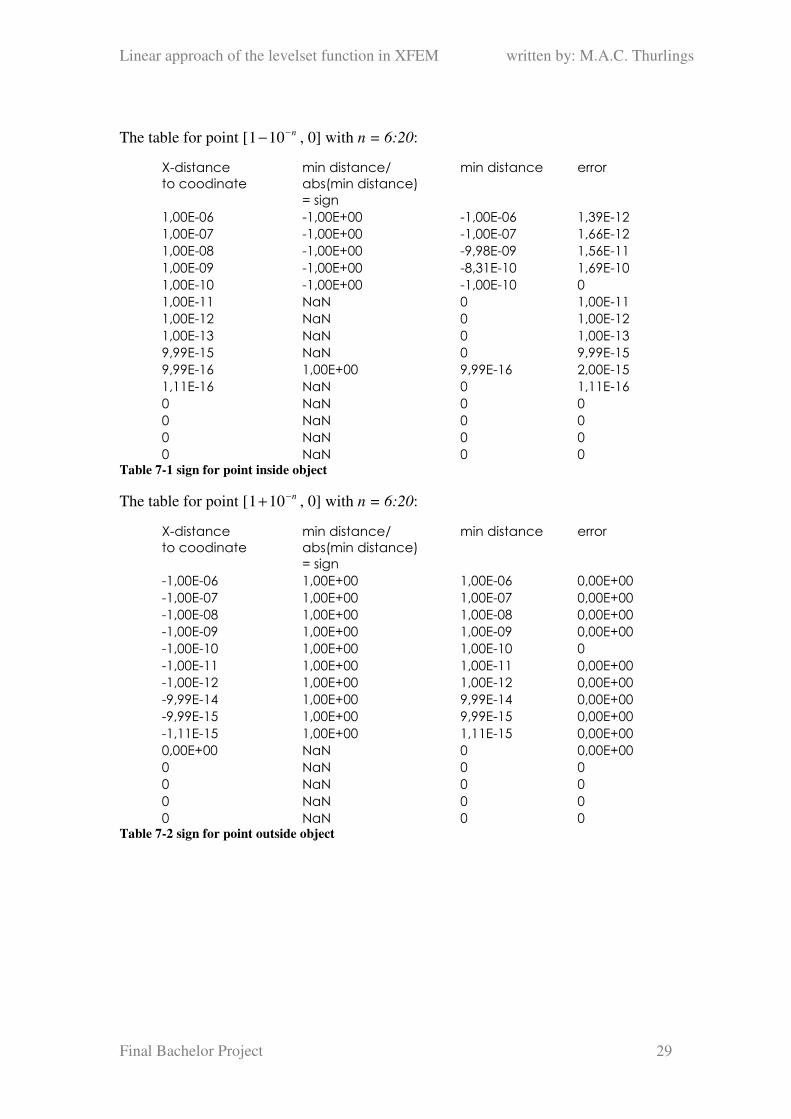
1) The program for this test is found in Appendix C. The object is described with
2000 object coordinates. The exact distance between the point and the
coordinate is n−10 with n = 6:20. At first the point is inside the object. The
sign stays -1 till the exact distance is 1010− as shown in Table 7-1. The table
produced by Matlab shows that the calculated distance for 1110− is exactly
zero. No sign can be calculated. When the point is outside the object only the
x-coordinate of the point has to be adjusted to n−+101 . For n = 6:20, Table 7-2
show that the sign is correct till n = 15. When n is getting smaller, the real
distance is so close to the machε number (machine number) that errors are
inevitable.
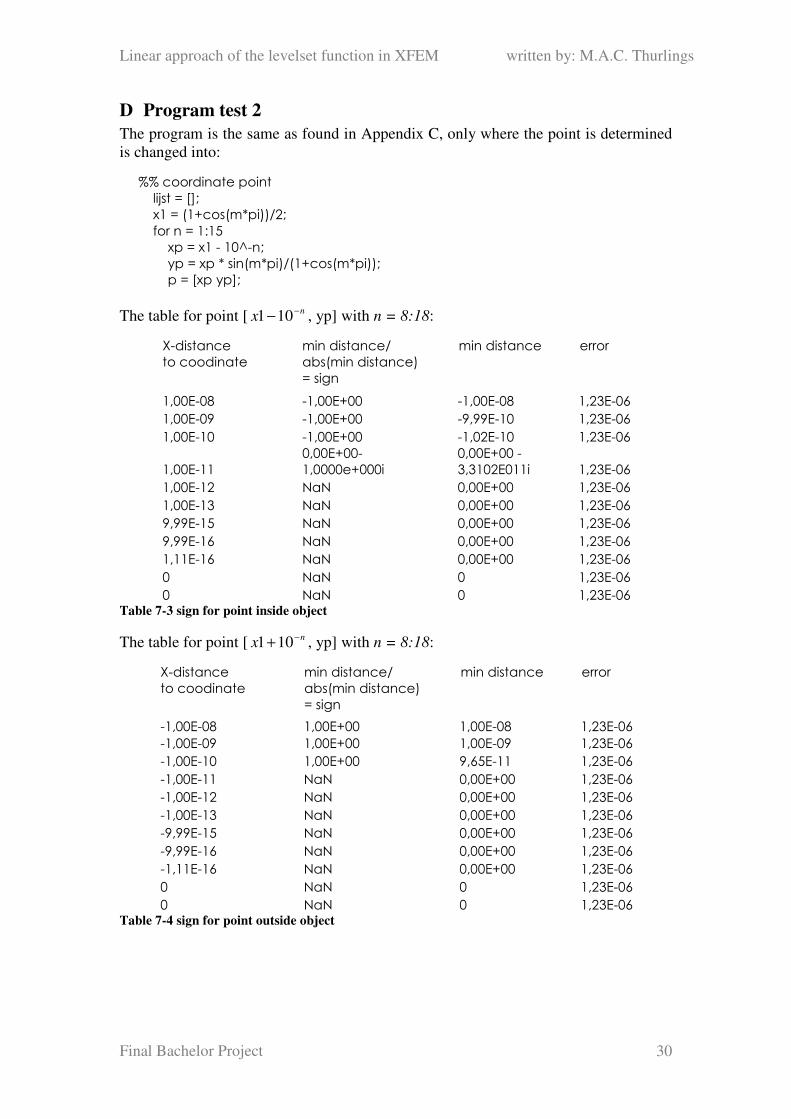
2) This test is almost the same as the previous test but the points are positioned at
a different place. In Appendix D is found how these points are determined.
The point starting from the inside of the object give the correct sign till n = 10.
When n = 11 the distance is imaginary shown in Table 7-3. This is most likely
a numerical error. This might give a problem in the actual XFEM program. It
is not known yet what will happen if an imaginary distance is introduced.
When the points is outside the object, the program gives the expected answer
till n = 10. When n > 10 the distance is zero, the sign can’t be calculated. This
is shown in Table 7-4.
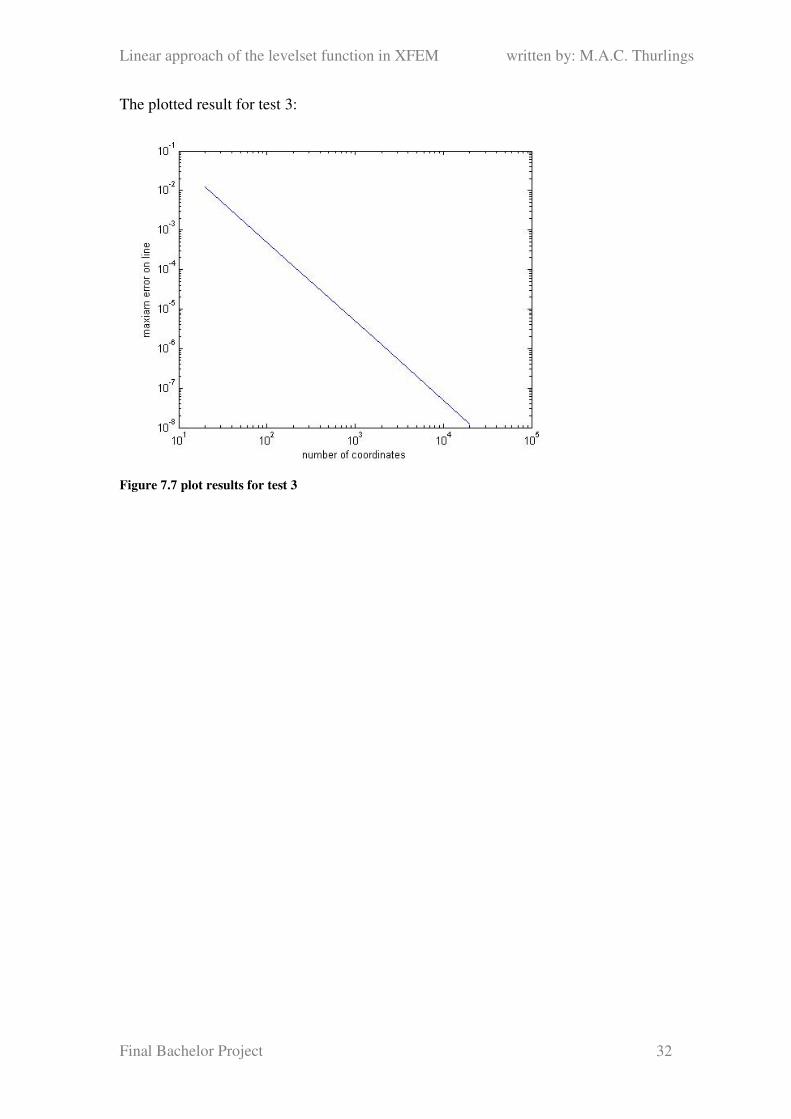
3) In this test the maximum error is determined with a different amount of object
coordinates. It will show how the error decreases for more object coordinates.
The error should decrease with a second order. This program is found in
Appendix E. Figure 7.7 shows the results of the program. This plot shows that
the maximum error changes with the second order which is expected.
In conclusion it shows that the results are acceptable to work with. There are only
errors within 1010− of the line. These errors are acceptable. There is only one other
problem that didn’t show from the results in the test but was discovered when running
the third test. A large cpu-time was required to calculate the minimum distance for a
large amount of object coordinates. A faster method has to be developed. This
program also does not seem easy to adapt for a 3D problem.
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 16
3. Improved linear approach in 2D
The idea behind the improved version is to prevent the roots, cosinus, sinus and any
other expensive calculations. The use of vectors may be faster. Vectors will give
advantage in 3D problems.
Redeveloping distance
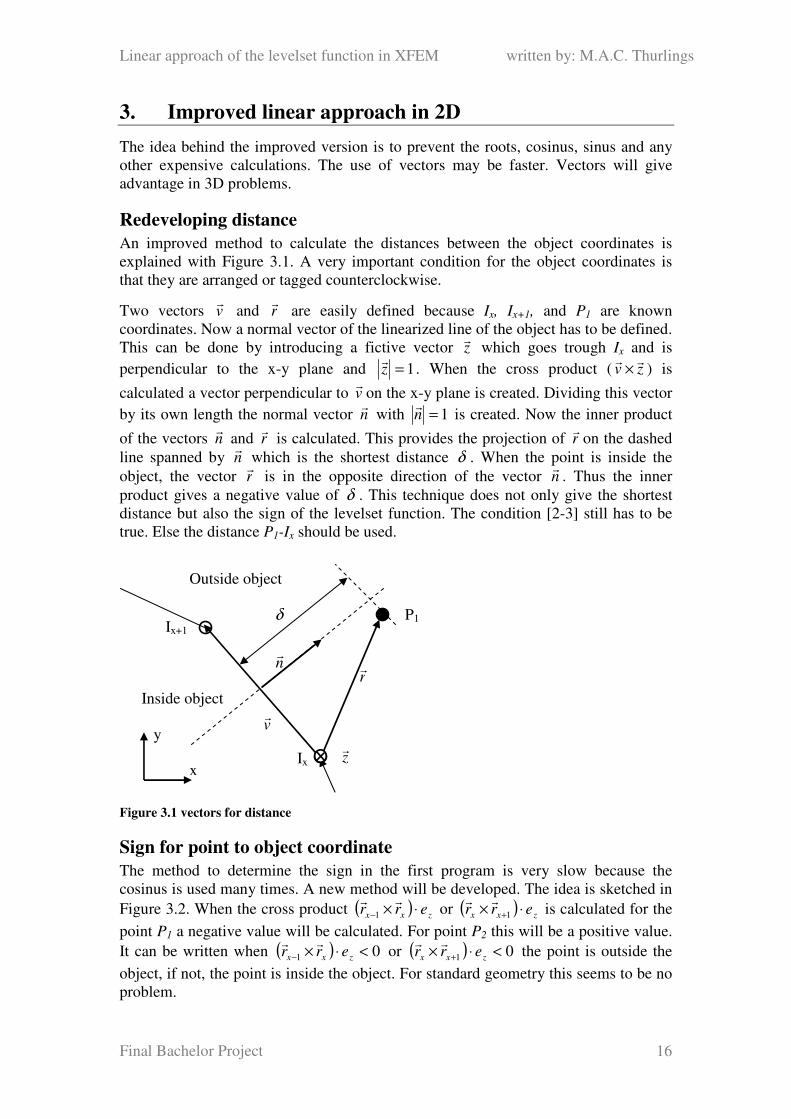
An improved method to calculate the distances between the object coordinates is
explained with Figure 3.1. A very important condition for the object coordinates is
that they are arranged or tagged counterclockwise.
Two vectors vr
and rr
are easily defined because Ix, Ix+1, and P1 are known
coordinates. Now a normal vector of the linearized line of the object has to be defined.
This can be done by introducing a fictive vector zr
which goes trough Ix and is
perpendicular to the x-y plane and 1=zr
. When the cross product ( zvrr
× ) is
calculated a vector perpendicular to vr
on the x-y plane is created. Dividing this vector
by its own length the normal vector nr
with 1=nr
is created. Now the inner product
of the vectors nr
and rr
is calculated. This provides the projection of rr
on the dashed
line spanned by nr
which is the shortest distance δ . When the point is inside the
object, the vector rr
is in the opposite direction of the vector nr
. Thus the inner
product gives a negative value of δ . This technique does not only give the shortest
distance but also the sign of the levelset function. The condition [2-3] still has to be
true. Else the distance P1-Ix should be used.
Figure 3.1 vectors for distance
Sign for point to object coordinate
The method to determine the sign in the first program is very slow because the
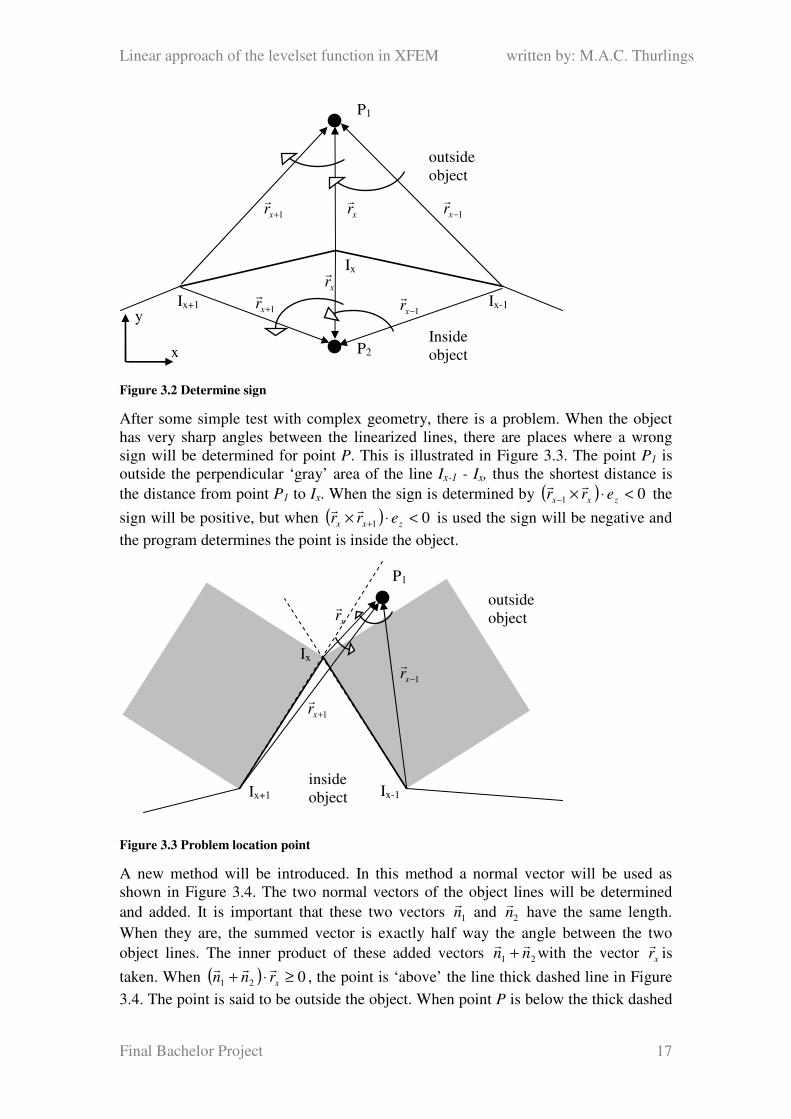
cosinus is used many times. A new method will be developed. The idea is sketched in
Figure 3.2. When the cross product ( ) zxx err ⋅×−
rr1 or ( ) zxx err ⋅× +1
rr is calculated for the
point P1 a negative value will be calculated. For point P2 this will be a positive value.
It can be written when ( ) 01 <⋅×− zxx errrr
or ( ) 01 <⋅× + zxx errrr
the point is outside the
object, if not, the point is inside the object. For standard geometry this seems to be no
problem.
P1
Outside object
Ix
Ix+1
δ
rr
vr
nr
Inside object
zr
y
x
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 17
Figure 3.2 Determine sign
After some simple test with complex geometry, there is a problem. When the object
has very sharp angles between the linearized lines, there are places where a wrong
sign will be determined for point P. This is illustrated in Figure 3.3. The point P1 is
outside the perpendicular ‘gray’ area of the line Ix-1 - Ix, thus the shortest distance is
the distance from point P1 to Ix. When the sign is determined by ( ) 01 <⋅×− zxx errrr
the
sign will be positive, but when ( ) 01 <⋅× + zxx errrr
is used the sign will be negative and
the program determines the point is inside the object.
Figure 3.3 Problem location point
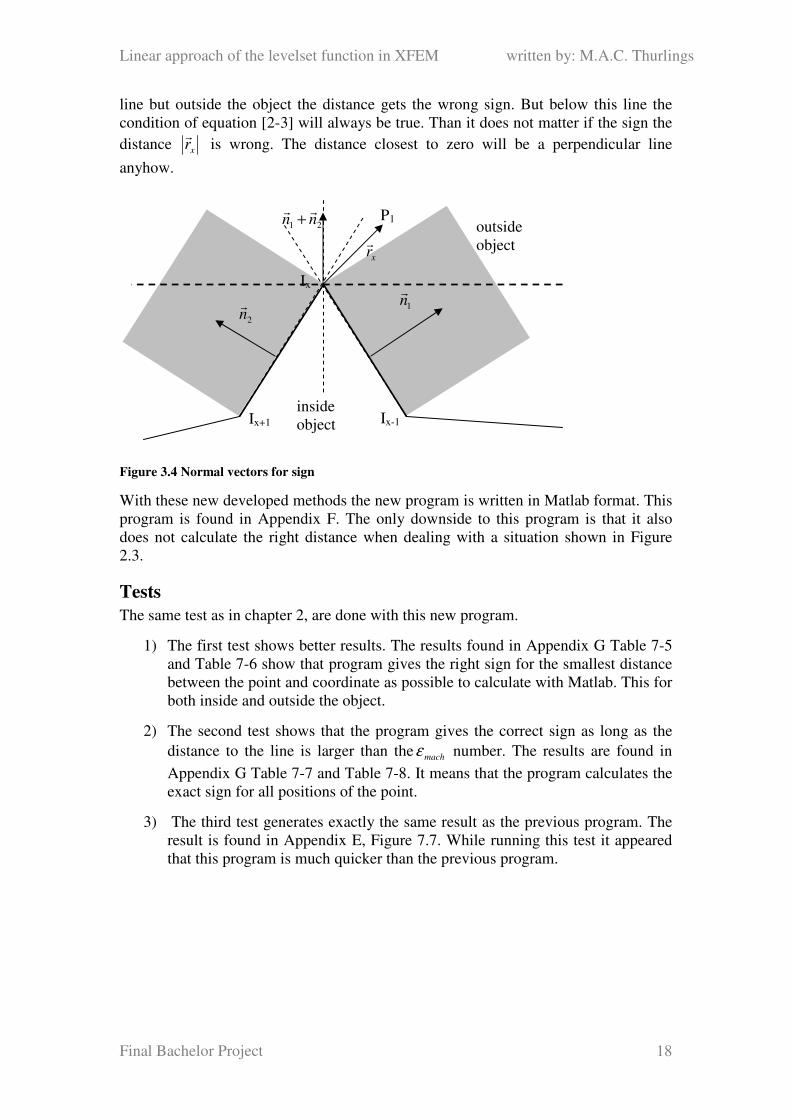
A new method will be introduced. In this method a normal vector will be used as
shown in Figure 3.4. The two normal vectors of the object lines will be determined
and added. It is important that these two vectors 1nr
and 2nr
have the same length.
When they are, the summed vector is exactly half way the angle between the two
object lines. The inner product of these added vectors 21 nnrr
+ with the vector xrr
is
taken. When ( ) 021 ≥⋅+ xrnnrrr
, the point is ‘above’ the line thick dashed line in Figure
3.4. The point is said to be outside the object. When point P is below the thick dashed
P2
P1
Ix
Ix-1 Ix+1
outside
object
Inside
object
1−xrr
xrr
1+xr
r
1+xrr
xrr
1−xrr
y
x
P1
Ix
Ix-1 Ix+1
outside
object
inside
object
1−xrr
xrr
1+xrr
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 18
line but outside the object the distance gets the wrong sign. But below this line the
condition of equation [2-3] will always be true. Than it does not matter if the sign the
distance xrr
is wrong. The distance closest to zero will be a perpendicular line
anyhow.
Figure 3.4 Normal vectors for sign
With these new developed methods the new program is written in Matlab format. This
program is found in Appendix F. The only downside to this program is that it also
does not calculate the right distance when dealing with a situation shown in Figure
2.3.
Tests
The same test as in chapter 2, are done with this new program.
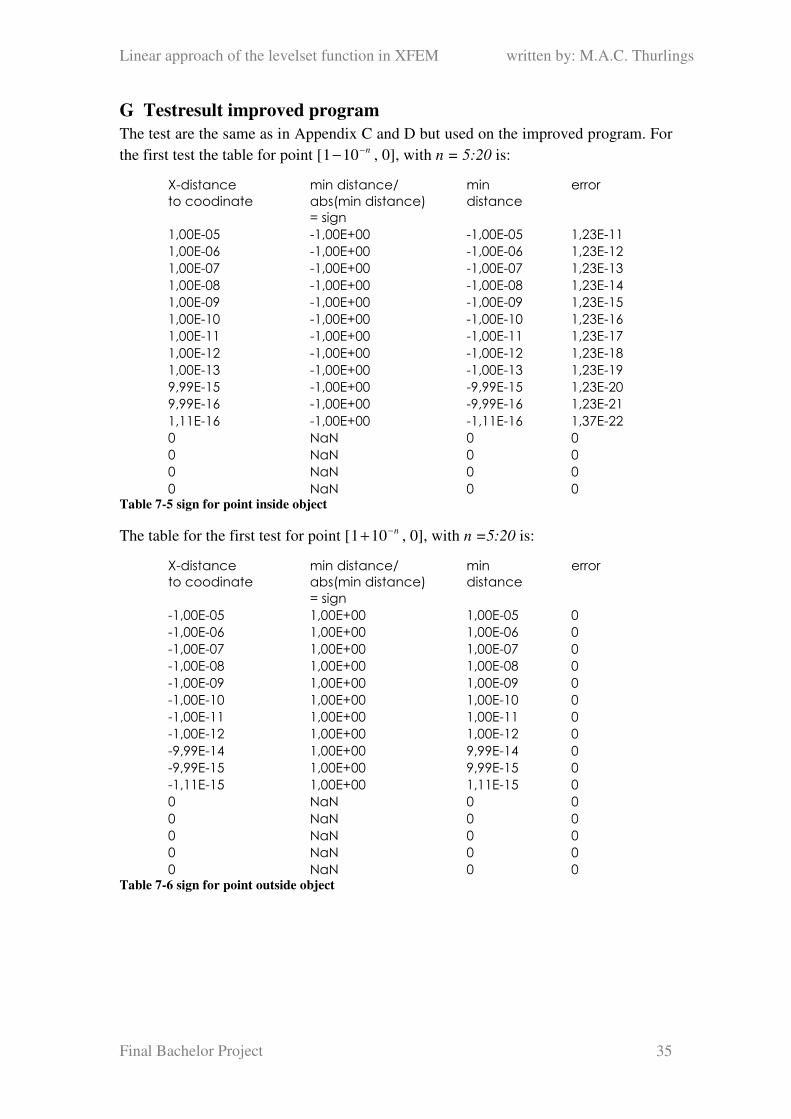
1) The first test shows better results. The results found in Appendix G Table 7-5
and Table 7-6 show that program gives the right sign for the smallest distance
between the point and coordinate as possible to calculate with Matlab. This for
both inside and outside the object.
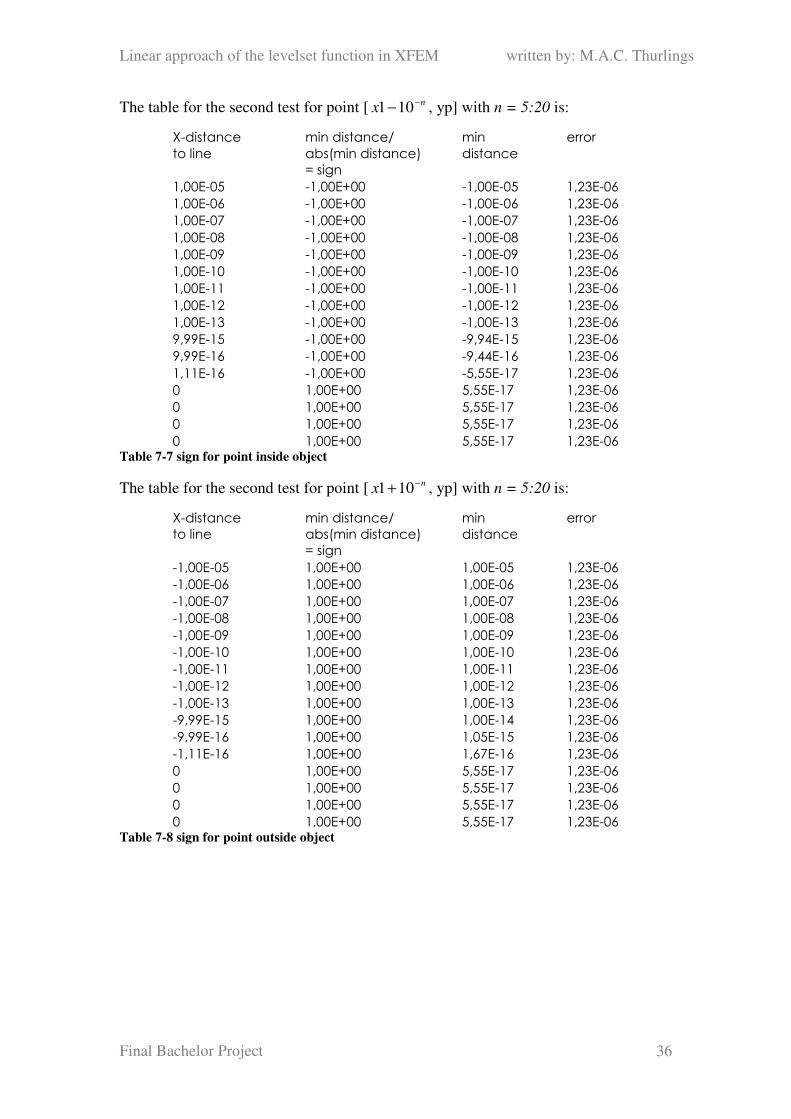
2) The second test shows that the program gives the correct sign as long as the
distance to the line is larger than the machε number. The results are found in
Appendix G Table 7-7 and Table 7-8. It means that the program calculates the
exact sign for all positions of the point.
3) The third test generates exactly the same result as the previous program. The
result is found in Appendix E, Figure 7.7. While running this test it appeared
that this program is much quicker than the previous program.
P1
Ix
Ix-1 Ix+1
outside
object
inside
object
1nr
xrr
2nr
21 nnrr
+
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 19
4. XFEM
The next step is to implement the algorithm in the existing xfem program and test if it
will generate acceptable results. The programs xfem1 and xfem2 are available. The
xfem2 is a more accurate program. This program divides the last elements into
triangle elements which gives a much more accurate approach of the object. In the
original program the geometry of the object is already created. This is done in the next
part of the program:
! create mesh for particle boundary
nelem = 4 * nx * radius / lx
call mesh_skeleton ( mesh_particle, nnodes=2*nelem, nelem=nelem, elshape=2,
&
ndim=2 )
rp = radius ! radius of the circular object
xpc = center ! initial position of the center of the object
call objectscoor ( 1, mesh_particle%coor )
do elem = 1, mesh_particle%nelem
mesh_particle%topology(1)%a(:,elem) = (/ 2*elem-1, 2*elem, 2*elem + 1 /)
end do
mesh_particle%topology(1)%a(3,mesh_particle%nelem) = 1 ! close circle
! one object
call add_to_mesh ( mesh, object='mesh', objectmesh=mesh_particle, &
topology=.true., intrule=2, nsubint=nsubinto )
The object coordinates are created in the subroutine ‘objectscoor’. This subroutine is
in the file subs1.f90. These coordinates can be used to make a linearized object. This
data is not transferred to the module ‘functions_xf2_m’ before the levelset function is
determined. This is done by the line:
lmesh => mesh ! supply mesh to mapcoor for mapping coordinates
This line is copied to a line before the levelset function is determined. Now the object
coordinates generated can be used in the function ‘levelset function’. The part where
the levelset function is determined is replaced by the program found in Appendix H.
Increasing object coordinates
It appears that the results of the xfem programs are very depended on the number of
object elements. When the object crosses just a very small percentage of an original
element the dividing does not work correct. To prevent this, the original mesh is
deformed, but in some cases this may not be enough. Other programs have a solution
for this problem but they are not used here. The amounts of object elements are
changed in the program line below by changing the value k. This will sometimes
prevent or create the described problem. It also provides more object coordinates.
With the original k = 4 there are only forty elements and eighty object coordinates.
When increasing k this number of coordinates also increases. The Lagrange
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 20
multipliers increase with the increasing elements. In future tests the number of
elements should not be increased but only the number of coordinates.
nelem = k * nx * radius / lx
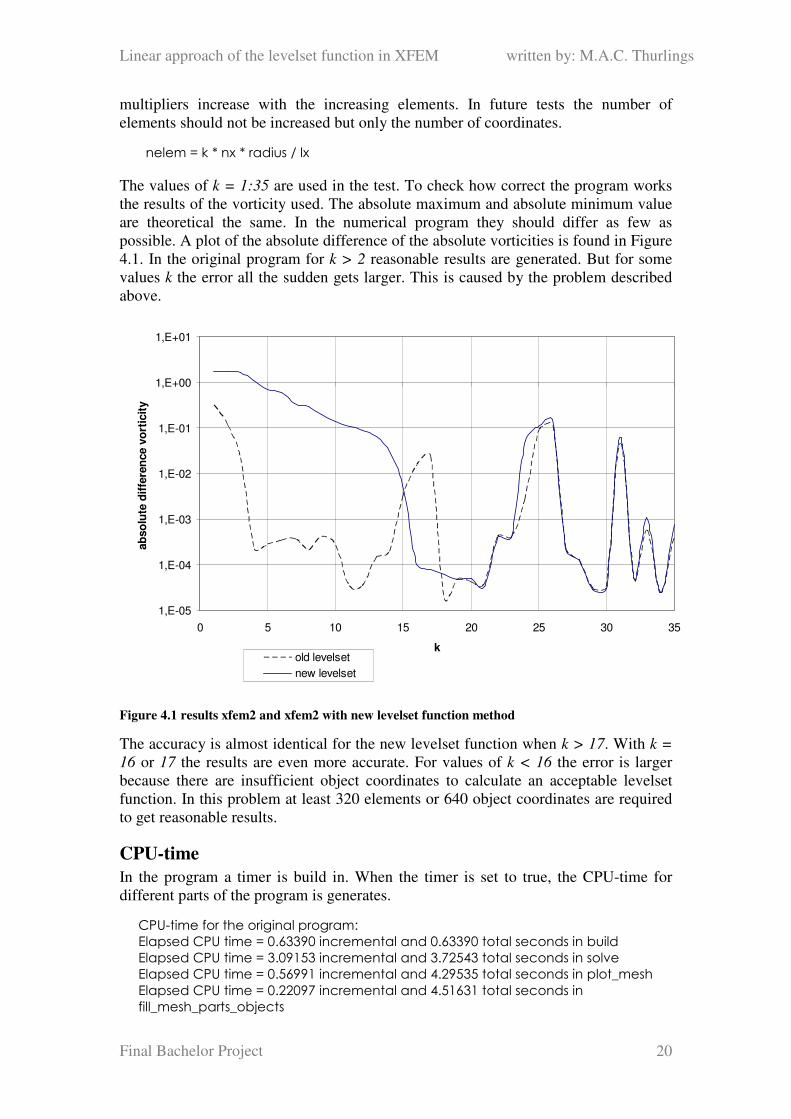
The values of k = 1:35 are used in the test. To check how correct the program works
the results of the vorticity used. The absolute maximum and absolute minimum value
are theoretical the same. In the numerical program they should differ as few as
possible. A plot of the absolute difference of the absolute vorticities is found in Figure
4.1. In the original program for k > 2 reasonable results are generated. But for some
values k the error all the sudden gets larger. This is caused by the problem described
above.
1,E-05
1,E-04
1,E-03
1,E-02
1,E-01
1,E+00
1,E+01
0 5 10 15 20 25 30 35
k
ab
so
lute
dif
fere
nce v
ort
icit
y
old levelset
new levelset
Figure 4.1 results xfem2 and xfem2 with new levelset function method
The accuracy is almost identical for the new levelset function when k > 17. With k =
16 or 17 the results are even more accurate. For values of k < 16 the error is larger
because there are insufficient object coordinates to calculate an acceptable levelset
function. In this problem at least 320 elements or 640 object coordinates are required
to get reasonable results.
CPU-time
In the program a timer is build in. When the timer is set to true, the CPU-time for
different parts of the program is generates.
CPU-time for the original program:
Elapsed CPU time = 0.63390 incremental and 0.63390 total seconds in build
Elapsed CPU time = 3.09153 incremental and 3.72543 total seconds in solve
Elapsed CPU time = 0.56991 incremental and 4.29535 total seconds in plot_mesh
Elapsed CPU time = 0.22097 incremental and 4.51631 total seconds in
fill_mesh_parts_objects
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 21
Elapsed CPU time = 0.33095 incremental and 4.84726 total seconds in fill_sample
CPU-time for the adjusted program
Elapsed CPU time = 0.67490 incremental and 0.67490 total seconds in build
Elapsed CPU time = 3.11353 incremental and 3.78842 total seconds in solve
Elapsed CPU time = 0.59991 incremental and 4.38833 total seconds in plot_mesh
Elapsed CPU time = 0.22297 incremental and 4.61130 total seconds in
fill_mesh_parts_objects
Elapsed CPU time = 0.32795 incremental and 4.93925 total seconds in fill_sample
These CPU-times are a bit variable when different processes are running but
reasonably constant to show the differences. The part were the levelset function is
determined is in the build part. Logically the CPU-time increases in this part. In this
case it is just an increase of 6%. The difference between the total time is even only
2% Other parts appear to be a bit faster. It is not clear if this is the result of the new
levelset function function. This increase in time is acceptable
Other shapes
The basic idea to introduce this new algorithm in xfem was to be able to introduce
other than standard geometries. Because of the problem with dividing elements which
are crosses by a small percentage, it will be difficult to introduce other shapes in
xfem2.
A simple adjustment to the original program would be to introduce an ellipse. This is
easily done by changing the lines where the coordinates are generated in the
subprogram subs1.f90. The 2-coordinates will be multiplied by 0,75.
coor(:,2) = rp * 0,75_dp * cos(p) + xpc(2)
This gives an ellipse, stretched in the 1-direction. When the value k is set to 20 the
program gives the following results for the voritcity.
max vorticity min voriticity abs diffence
4,5182377E+00 -4,5187312E+00 4,9344487E-04
Thus also for other shapes a very accurate absolute difference between the vorticities
can be determined. For other values of k with this shape the program is not as
consistent as it was for the cylinder.
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 22
5. Conclusion and recommendation
With the results of the first chapter can be concluded that QUAD-9 elements should
be used. These are much more accurate and faster. There are geometrical examples
where TRIANGLE-9 elements have there benefits. But it is also possible to combine
these two quadratic element types. Linear elements should only be used with
nonlinear problems.
The linear approach of the levelset function is best calculated without cosinuses and
roots. These are expensive operators and less accurate. Only the lengths and vectors of
the objects and points are used. When using these, an extra condition for the object
coordinates is introduced. The object coordinates have to be arranged or tagged
counterclockwise. When this is implemented the results are optimal. There is of
coarse still an error between the exact levelset function and the linear approach. This
error decreases with second order when the number of object coordinates is increased.
The result of the algorithm implemented in the original xfem2 program showed when
a minimum object coordinates is reached the program generates similar results as the
old program. The algorithm can easily be changed for 3D problems. Instead of the
fictive vector zr
a second vector of the object element can be used to determine the
normal vector.
There is a ‘topology’ generated and added to the object. This is a list which contains
nodal numbers. The first row of the ‘topology’ contains the nodal numbers to which
the first element is connected and so on. It is possible to generate a list that works the
other way around, called the ‘nodelem’. That list is not jet generated. When an object
changed for instance in time, nodes can be added. This will break the clockwise
sequence of the nodes. Then it is not possible to use the previous and next number of
the node as done in the existing program. Instead the ‘topology’ and ‘nodelem’ should
be used. This ‘nodelem’ is not generated in the program and there for not
implemented in the program.
The program cannot deal with situations explained with Figure 2.3. This can be
changed by introducing a brute force method which calculates the distance to all
linearized lines excluding those were condition [2-3] is false. In stead of using
condition [2-3] it might be possible to use the local coordinate system of the elements
connecting the object coordinates. When the position of the point is outside the
perpendicular area described in local coordinates with 1−<ξ or 1>ξ , condition [2-
3] is false and the distance to the line should be ignored.
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 23
6. Literature
[1] TFEM user guide. A toolkit for finite element method. By: Martien A. Hulsen.
Version 25th
June, 2009
[2] http://gathering.tweakers.net/forum/list_messages/1228505
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 24
7. Appendix
A Adjustments in the program for the Poisson equation.
The thick lines are implemented between the original program lines.
type(plot_options_t) :: plot_options
type(coefficients_t) :: coefficients
! Minimum error and number of elements
integer :: n ! number of elements in x & y
real :: m ! minimum error
real :: time_begin, time_end
m = 1.E-7
n = 5
! fill coefficients
call create_coefficients ( coefficients, ncoefi=100, ncoefr=50 )
coefficients%r(2:) = 0
! start loop
do
call cpu_time(time_begin)
! create mesh
call fill_sysvector ( mesh, problem, solexact, &
node1=1, node2=mesh%nnodes, func=func, funcnr=3 )
! print maximum difference of sol-solexact to standard output
call cpu_time (time_end)
print *, problem%numundegfd, 'v', maxval( abs(sol%u -solexact%u) ), 'v',
time_end - time_begin
! plot mesh
call plot_mesh ( plot_options, mesh, filename='mesh.fig' )
call plot_color_contour ( plot_options, mesh, problem, filename='sol.fig', &
sysvector=sol )
! Increasing number of elements and ending statement
n = n + 5
if ( (maxval( abs(sol%u(:) -solexact%u(:)) )) < m) exit
! delete all data including all allocated memory
call delete ( sysmatrix )
! End of loop
end do
call delete ( coefficients )
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 25
B Result for changing geometry and equation
Results for the diamond shape:
1,00E-08
1,00E-07
1,00E-06
1,00E-05
1,00E-04
1,00E-03
1,00E-02
1,00E-01
1,00E+00
100 1000 10000 100000
#dof
Err
or
Triangle, 3 nodes Triangel, 6 nodes Quad, 4 nodes Quad, 9 nodes
Figure 7.1 Error versus number of unknown dof
1,00E-08
1,00E-07
1,00E-06
1,00E-05
1,00E-04
1,00E-03
1,00E-02
1,00E-01
1,00E+00
1,00E-003 1,00E-002 1,00E-001 1,00E+000 1,00E+001
cpu-time
err
or
Triangle, 3 nodes Triangel, 6 nodes Quad, 4 nodes Quad, 9 nodes
Figure 7.2 CPU-time versus error
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 26
Results for the quadrilateral with curved curves:
1,00E-08
1,00E-07
1,00E-06
1,00E-05
1,00E-04
1,00E-03
1,00E-02
1,00E-01
1,00E+00
100 1000 10000 100000
#dofE
rro
r
Triangle, 3 nodes Triangel, 6 nodes Quad, 4 nodes Quad, 9 nodes
Figure 7.3 Error versus number of unknown dof
1,00E-08
1,00E-07
1,00E-06
1,00E-05
1,00E-04
1,00E-03
1,00E-02
1,00E-01
1,00E+00
1,00E-003 1,00E-002 1,00E-001 1,00E+000 1,00E+001
cpu-time
Err
or
Triangle, 3 nodes Triangel, 6 nodes Quad, 4 nodes Quad, 9 nodes
Figure 7.4 CPU-time versus error
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 27
Results for the equation [1-2]:
1,00E-008
1,00E-007
1,00E-006
1,00E-005
1,00E-004
1,00E-003
1,00E-002
1,00E-001
1,00E+000
100 1000 10000 100000
#dofE
rro
r
Triangle, 3 nodes Triangel, 6 nodes Quad, 4 nodes Quad, 9 nodes
Figure 7.5 Error versus number of unknown dof
1,00E-008
1,00E-007
1,00E-006
1,00E-005
1,00E-004
1,00E-003
1,00E-002
1,00E-001
1,00E+000
1,00E-003 1,00E-002 1,00E-001 1,00E+000 1,00E+001
CPU_time
Err
or
Triangle, 3 nodes Triangel, 6 nodes Quad, 4 nodes Quad, 9 nodes
Figure 7.6 CPU-time versus error
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 28
C Program test 1
clear all; close all; clc
format short e
%% creating object coordinates
x = [];
y = [];
lijst2 = [];
for k = 3
m = 10^-k;
x = [];
y = [];
objectcoor = [];
for n = 0 : m*pi : 2*pi-m*pi
x = [x; cos(n)];
y = [y; sin(n)];
end
objectcoor = [x y];
%% coordinate point
lijst = [];
for n = 1:12
xp = 1 - 10^-n;
p = [xp 0];
%% shortest distance
shortest_dist = kortste_afstand_lineair (objectcoor, p);
%% real answer and error
if p(1)^2+p(2)^2 > 1
realanswer = sqrt(p(1)^2+p(2)^2) - 1;
error = abs(realanswer - shortest_dist);
g = 1;
elseif p(1)^2+p(2)^2 < 1
realanswer = 1- sqrt(p(1)^2+p(2)^2);
error = abs(realanswer + shortest_dist);
g = 2;
else
error = abs(shortest_dist);
g = 3;
end
%% list of results
lijst = [lijst; 1-xp shortest_dist/abs(shortest_dist) shortest_dist error ];
size(lijst);
end
maxerror = max(lijst);
lijst2 = [lijst2; size(objectcoor,1) maxerror];
end
lijst
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 29
The table for point [ n−−101 , 0] with n = 6:20:
X-distance
to coodinate
min distance/
abs(min distance)
= sign
min distance error
1,00E-06 -1,00E+00 -1,00E-06 1,39E-12
1,00E-07 -1,00E+00 -1,00E-07 1,66E-12
1,00E-08 -1,00E+00 -9,98E-09 1,56E-11
1,00E-09 -1,00E+00 -8,31E-10 1,69E-10
1,00E-10 -1,00E+00 -1,00E-10 0
1,00E-11 NaN 0 1,00E-11
1,00E-12 NaN 0 1,00E-12
1,00E-13 NaN 0 1,00E-13
9,99E-15 NaN 0 9,99E-15
9,99E-16 1,00E+00 9,99E-16 2,00E-15
1,11E-16 NaN 0 1,11E-16
0 NaN 0 0
0 NaN 0 0
0 NaN 0 0
0 NaN 0 0 Table 7-1 sign for point inside object
The table for point [ n−+101 , 0] with n = 6:20:
X-distance
to coodinate
min distance/
abs(min distance)
= sign
min distance error
-1,00E-06 1,00E+00 1,00E-06 0,00E+00
-1,00E-07 1,00E+00 1,00E-07 0,00E+00
-1,00E-08 1,00E+00 1,00E-08 0,00E+00
-1,00E-09 1,00E+00 1,00E-09 0,00E+00
-1,00E-10 1,00E+00 1,00E-10 0
-1,00E-11 1,00E+00 1,00E-11 0,00E+00
-1,00E-12 1,00E+00 1,00E-12 0,00E+00
-9,99E-14 1,00E+00 9,99E-14 0,00E+00
-9,99E-15 1,00E+00 9,99E-15 0,00E+00
-1,11E-15 1,00E+00 1,11E-15 0,00E+00
0,00E+00 NaN 0 0,00E+00
0 NaN 0 0
0 NaN 0 0
0 NaN 0 0
0 NaN 0 0 Table 7-2 sign for point outside object
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 30
D Program test 2
The program is the same as found in Appendix C, only where the point is determined
is changed into:
%% coordinate point
lijst = [];
x1 = (1+cos(m*pi))/2;
for n = 1:15
xp = x1 - 10^-n;
yp = xp * sin(m*pi)/(1+cos(m*pi));
p = [xp yp];
The table for point [ nx
−−101 , yp] with n = 8:18:
X-distance
to coodinate
min distance/
abs(min distance)
= sign
min distance error
1,00E-08 -1,00E+00 -1,00E-08 1,23E-06
1,00E-09 -1,00E+00 -9,99E-10 1,23E-06
1,00E-10 -1,00E+00 -1,02E-10 1,23E-06
1,00E-11
0,00E+00-
1,0000e+000i
0,00E+00 -
3,3102E011i 1,23E-06
1,00E-12 NaN 0,00E+00 1,23E-06
1,00E-13 NaN 0,00E+00 1,23E-06
9,99E-15 NaN 0,00E+00 1,23E-06
9,99E-16 NaN 0,00E+00 1,23E-06
1,11E-16 NaN 0,00E+00 1,23E-06
0 NaN 0 1,23E-06
0 NaN 0 1,23E-06 Table 7-3 sign for point inside object
The table for point [ nx
−+101 , yp] with n = 8:18:
X-distance
to coodinate
min distance/
abs(min distance)
= sign
min distance error
-1,00E-08 1,00E+00 1,00E-08 1,23E-06
-1,00E-09 1,00E+00 1,00E-09 1,23E-06
-1,00E-10 1,00E+00 9,65E-11 1,23E-06
-1,00E-11 NaN 0,00E+00 1,23E-06
-1,00E-12 NaN 0,00E+00 1,23E-06
-1,00E-13 NaN 0,00E+00 1,23E-06
-9,99E-15 NaN 0,00E+00 1,23E-06
-9,99E-16 NaN 0,00E+00 1,23E-06
-1,11E-16 NaN 0,00E+00 1,23E-06
0 NaN 0 1,23E-06
0 NaN 0 1,23E-06 Table 7-4 sign for point outside object
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 31
E Program test 3
clear all; close all; clc
format short e
%% creating object coordinates
x = [];
y = [];
lijst2 = [];
for k = 1:4
m = 10^-k
x = [];
y = [];
objectcoor = [];
for n = 0 : m*pi : 2*pi-m*pi
x = [x; cos(n)];
y = [y; sin(n)];
end
objectcoor = [x y];
%% coordinate point
lijst = [];
for xp = cos(m*pi): (1-cos(m*pi))/99 : 1
yp = -sin(m*pi)/(1-cos(m*pi))*xp + sin(m*pi)/(1-cos(m*pi));
p = [xp yp];
%% shcortest distance
shortest_dist = kortste_afstand_lineair (objectcoor, p);
%% exact answer and error
if p(1)^2+p(2)^2 > 1
realanswer = sqrt(p(1)^2+p(2)^2) - 1;
error = abs(realanswer - shortest_dist);
g = 1;
elseif p(1)^2+p(2)^2 < 1
realanswer = 1- sqrt(p(1)^2+p(2)^2);
error = abs(realanswer + shortest_dist);
g = 2;
else
error = abs(shortest_dist);
g = 3;
end
%% list of result of all points
lijst = [lijst; error ];
size(lijst)
end
maxerror = max(lijst);
lijst2 = [lijst2; size(objectcoor,1) maxerror];
end
%% plot results
loglog(lijst2(:,1),lijst2(:,2))
xlabel('number of coordinates')
ylabel('maxiam error on line')
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 32
The plotted result for test 3:
Figure 7.7 plot results for test 3
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 33
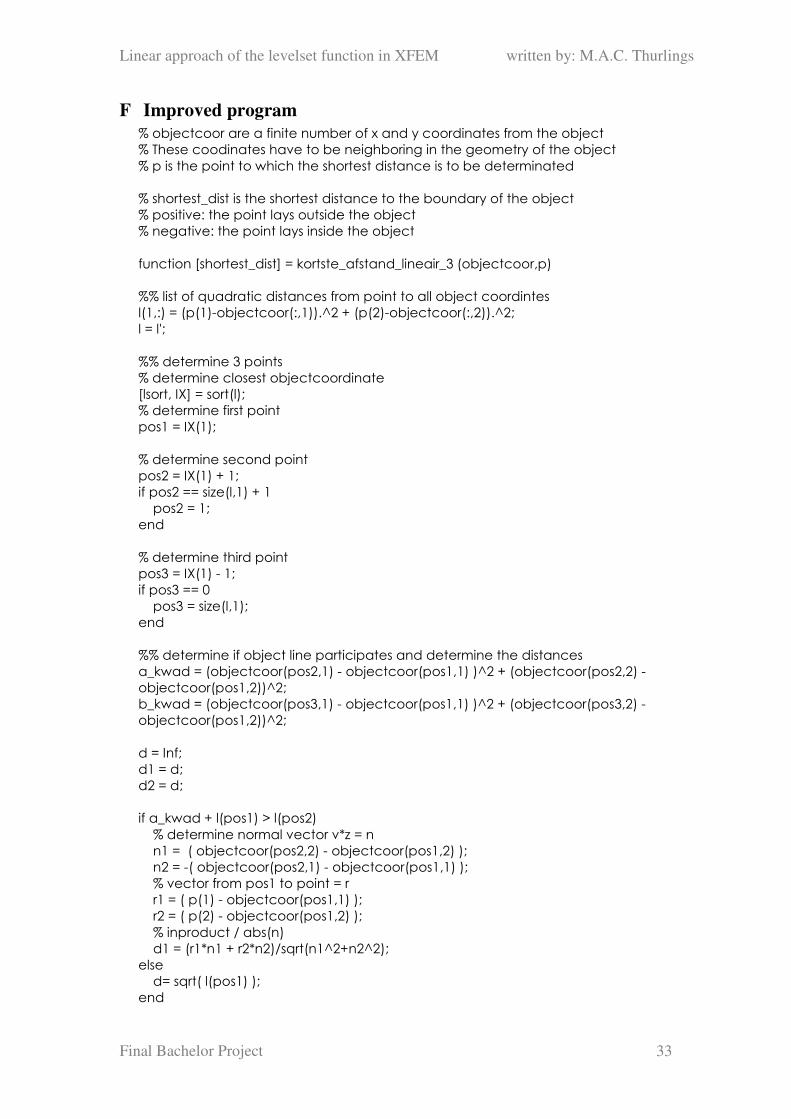
F Improved program
% objectcoor are a finite number of x and y coordinates from the object
% These coodinates have to be neighboring in the geometry of the object
% p is the point to which the shortest distance is to be determinated
% shortest_dist is the shortest distance to the boundary of the object
% positive: the point lays outside the object
% negative: the point lays inside the object
function [shortest_dist] = kortste_afstand_lineair_3 (objectcoor,p)
%% list of quadratic distances from point to all object coordintes
l(1,:) = (p(1)-objectcoor(:,1)).^2 + (p(2)-objectcoor(:,2)).^2;
l = l';
%% determine 3 points
% determine closest objectcoordinate
[lsort, IX] = sort(l);
% determine first point
pos1 = IX(1);
% determine second point
pos2 = IX(1) + 1;
if pos2 == size(l,1) + 1
pos2 = 1;
end
% determine third point
pos3 = IX(1) - 1;
if pos3 == 0
pos3 = size(l,1);
end
%% determine if object line participates and determine the distances
a_kwad = (objectcoor(pos2,1) - objectcoor(pos1,1) )^2 + (objectcoor(pos2,2) -
objectcoor(pos1,2))^2;
b_kwad = (objectcoor(pos3,1) - objectcoor(pos1,1) )^2 + (objectcoor(pos3,2) -
objectcoor(pos1,2))^2;
d = Inf;
d1 = d;
d2 = d;
if a_kwad + l(pos1) > l(pos2)
% determine normal vector v*z = n
n1 = ( objectcoor(pos2,2) - objectcoor(pos1,2) );
n2 = -( objectcoor(pos2,1) - objectcoor(pos1,1) );
% vector from pos1 to point = r
r1 = ( p(1) - objectcoor(pos1,1) );
r2 = ( p(2) - objectcoor(pos1,2) );
% inproduct / abs(n)
d1 = (r1*n1 + r2*n2)/sqrt(n1^2+n2^2);
else
d= sqrt( l(pos1) );
end

Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 34
if b_kwad + l(pos1) > l(pos3)
% determine normal vector v*z = n
n1 = ( objectcoor(pos1,2) - objectcoor(pos3,2) );
n2 = -( objectcoor(pos1,1) - objectcoor(pos3,1) );
% vector from pos1 to point = r
r1 = ( p(1) - objectcoor(pos3,1) );
r2 = ( p(2) - objectcoor(pos3,2) );
% inproduct / abs(n)
d2 = (r1*n1 + r2*n2)/sqrt(n1^2+n2^2);
else
d =sqrt( l(pos1) );
end
%% sign for d
n11 = ( objectcoor(pos2,2) - objectcoor(pos1,2) );
n12 = -( objectcoor(pos2,1) - objectcoor(pos1,1) );
ln1 = sqrt(n11^2 + n12^2);
n21 = ( objectcoor(pos1,2) - objectcoor(pos3,2) );
n22 = -( objectcoor(pos1,1) - objectcoor(pos3,1) );
ln2 = sqrt(n21^2 + n22^2);
n1 = n11/ln1 + n21/ln2;
n2 = n12/ln1 + n22/ln2;
r1 = ( p(1) - objectcoor(pos1,1) );
r2 = ( p(2) - objectcoor(pos1,2) );
value = (r1*n1 + r2*n2);
if value <= 0
d = -d;
end
%% kortste afstand
D = [d; d1; d2];
[dsort,I] = sort(abs(D));
shortest_dist = D( I(1) );
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 35
G Testresult improved program
The test are the same as in Appendix C and D but used on the improved program. For
the first test the table for point [ n−−101 , 0], with n = 5:20 is:
X-distance
to coodinate
min distance/
abs(min distance)
= sign
min
distance
error
1,00E-05 -1,00E+00 -1,00E-05 1,23E-11
1,00E-06 -1,00E+00 -1,00E-06 1,23E-12
1,00E-07 -1,00E+00 -1,00E-07 1,23E-13
1,00E-08 -1,00E+00 -1,00E-08 1,23E-14
1,00E-09 -1,00E+00 -1,00E-09 1,23E-15
1,00E-10 -1,00E+00 -1,00E-10 1,23E-16
1,00E-11 -1,00E+00 -1,00E-11 1,23E-17
1,00E-12 -1,00E+00 -1,00E-12 1,23E-18
1,00E-13 -1,00E+00 -1,00E-13 1,23E-19
9,99E-15 -1,00E+00 -9,99E-15 1,23E-20
9,99E-16 -1,00E+00 -9,99E-16 1,23E-21
1,11E-16 -1,00E+00 -1,11E-16 1,37E-22
0 NaN 0 0
0 NaN 0 0
0 NaN 0 0
0 NaN 0 0 Table 7-5 sign for point inside object
The table for the first test for point [ n−+101 , 0], with n =5:20 is:
X-distance
to coodinate
min distance/
abs(min distance)
= sign
min
distance
error
-1,00E-05 1,00E+00 1,00E-05 0
-1,00E-06 1,00E+00 1,00E-06 0
-1,00E-07 1,00E+00 1,00E-07 0
-1,00E-08 1,00E+00 1,00E-08 0
-1,00E-09 1,00E+00 1,00E-09 0
-1,00E-10 1,00E+00 1,00E-10 0
-1,00E-11 1,00E+00 1,00E-11 0
-1,00E-12 1,00E+00 1,00E-12 0
-9,99E-14 1,00E+00 9,99E-14 0
-9,99E-15 1,00E+00 9,99E-15 0
-1,11E-15 1,00E+00 1,11E-15 0
0 NaN 0 0
0 NaN 0 0
0 NaN 0 0
0 NaN 0 0
0 NaN 0 0 Table 7-6 sign for point outside object
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 36
The table for the second test for point [ nx
−−101 , yp] with n = 5:20 is:
X-distance
to line
min distance/
abs(min distance)
= sign
min
distance
error
1,00E-05 -1,00E+00 -1,00E-05 1,23E-06
1,00E-06 -1,00E+00 -1,00E-06 1,23E-06
1,00E-07 -1,00E+00 -1,00E-07 1,23E-06
1,00E-08 -1,00E+00 -1,00E-08 1,23E-06
1,00E-09 -1,00E+00 -1,00E-09 1,23E-06
1,00E-10 -1,00E+00 -1,00E-10 1,23E-06
1,00E-11 -1,00E+00 -1,00E-11 1,23E-06
1,00E-12 -1,00E+00 -1,00E-12 1,23E-06
1,00E-13 -1,00E+00 -1,00E-13 1,23E-06
9,99E-15 -1,00E+00 -9,94E-15 1,23E-06
9,99E-16 -1,00E+00 -9,44E-16 1,23E-06
1,11E-16 -1,00E+00 -5,55E-17 1,23E-06
0 1,00E+00 5,55E-17 1,23E-06
0 1,00E+00 5,55E-17 1,23E-06
0 1,00E+00 5,55E-17 1,23E-06
0 1,00E+00 5,55E-17 1,23E-06 Table 7-7 sign for point inside object
The table for the second test for point [ nx
−+101 , yp] with n = 5:20 is:
X-distance
to line
min distance/
abs(min distance)
= sign
min
distance
error
-1,00E-05 1,00E+00 1,00E-05 1,23E-06
-1,00E-06 1,00E+00 1,00E-06 1,23E-06
-1,00E-07 1,00E+00 1,00E-07 1,23E-06
-1,00E-08 1,00E+00 1,00E-08 1,23E-06
-1,00E-09 1,00E+00 1,00E-09 1,23E-06
-1,00E-10 1,00E+00 1,00E-10 1,23E-06
-1,00E-11 1,00E+00 1,00E-11 1,23E-06
-1,00E-12 1,00E+00 1,00E-12 1,23E-06
-1,00E-13 1,00E+00 1,00E-13 1,23E-06
-9,99E-15 1,00E+00 1,00E-14 1,23E-06
-9,99E-16 1,00E+00 1,05E-15 1,23E-06
-1,11E-16 1,00E+00 1,67E-16 1,23E-06
0 1,00E+00 5,55E-17 1,23E-06
0 1,00E+00 5,55E-17 1,23E-06
0 1,00E+00 5,55E-17 1,23E-06
0 1,00E+00 5,55E-17 1,23E-06 Table 7-8 sign for point outside object
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 37
H Program in XFEM
function levelset ( x )
real(dp), dimension(:,:), intent(in) :: x ! list of points
real(dp), dimension(size(x,1)) :: levelset ! list of levelset
real(dp), dimension(size(lmesh%objects(1)%coor(:,1)),2) :: objc ! object
coordinates
real(dp), dimension(size(objc,1)) :: l ! distances to all object
coordinates
real(dp), dimension(3) :: D_tot ! list with distances
integer :: pos1, pos2, pos3, i, j ! coordinate positions
real(dp) :: temp, a_kwad, b_kwad, ln1, ln2, v ! temprary constants
real(dp) :: d, d1, d2 ! distances
real(dp) :: n1, n2, r1, r2, n11, n12, n21, n22 ! vectorcomponents
real(dp) :: smallest_D
real(dp) :: pi
!the geometry of the object, should be counterclockwise. (else multiply d with -1)
objc(:,:) = lmesh%objects(1)%coor(1:size(lmesh%objects(1)%coor(:,1)),:)
! determine distance to all objectcoordiantes
do j = 1, size(x,1)
l(:) = (x(j,1)-objc(:,1))**2 + (x(j,2)-objc(:,2))**2
! find position shortest distance to coordinaat in l()
pos1 = 1
temp = l(1)
do i = 2,size(l)
if (l(i)<temp) then
temp = l(i)
pos1 = i
end if
end do
! determine 1 position further (pos2) and 1 position back (pos3)
! topology and nodelem not used, nodelem is nog generated jet
pos2 = pos1 + 1
if (pos2 == size(l) + 1) then
pos2 = 1
end if
pos3 = pos1 - 1
if (pos3 == 0) then
pos3 = size(l)
end if
! value's to determine if distance has to be calculated
a_kwad = ( objc(pos2,1) - objc(pos1,1) )**2 + ( objc(pos2,2) - objc(pos1,2) )**2
b_kwad = ( objc(pos3,1) - objc(pos1,1) )**2 + ( objc(pos3,2) - objc(pos1,2) )**2
! distances on high value to prevent errors when not determined
d = maxval(l)
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 38
d1 = d
d2 = d
! first distance d1
if ( a_kwad + l(pos1) > l(pos2) ) then
! determine normal vector v*z = n with z = [0, 0, 1]
n1 = ( objc(pos2,2) - objc(pos1,2) )
n2 = -( objc(pos2,1) - objc(pos1,1) )
! vector from pos1 to objc(pos1) = r
r1 = ( x(j,1) -objc(pos1,1) )
r2 = ( x(j,2) -objc(pos1,2) )
! (n dot r)/abs(n)
d1 = (r1*n1 + r2*n2)/(sqrt(n1**2 + n2**2))
else
d = sqrt(l(pos1))
end if
! second distance d2
if ( b_kwad + l(pos1) > l(pos3) ) then
! determine normal vector v*z = n with z = [0, 0, 1]
n1 = ( objc(pos1,2) - objc(pos3,2) )
n2 = -( objc(pos1,1) - objc(pos3,1) )
! vector from pos1 to objc(pos1) = r
r1 = ( x(j,1) -objc(pos3,1) )
r2 = ( x(j,2) -objc(pos3,2) )
! (n dot r)/abs(n)
d2 = (r1*n1 + r2*n2)/(sqrt(n1**2 + n2**2))
else
d = sqrt(l(pos1))
end if
! determine sign for d
n11 = ( objc(pos2,2) - objc(pos1,2) )
n12 = -( objc(pos2,1) - objc(pos1,1) )
ln1 = sqrt(n11**2+n12**2)
n21 = ( objc(pos1,2) - objc(pos3,2) )
n22 = -( objc(pos1,1) - objc(pos3,1) )
ln2 = sqrt(n21**2+n22**2)
n1 = n11/ln1 + n21/ln2
n2 = n12/ln1 + n22/ln2
r1 = ( x(j,1) -objc(pos1,1) )
r2 = ( x(j,2) -objc(pos1,2) )
v = (r1*n1 + r2*n2)
if (v <= 0) then
d = -d
end if
! shortest distances d, d1, d2
D_tot = (/d, d1, d2/)
Linear approach of the levelset function in XFEM written by: M.A.C. Thurlings
Final Bachelor Project 39
smallest_D = D_tot(1)
if ( abs(D_tot(2)) < abs(smallest_D) ) then
smallest_D = D_tot(2)
end if
if ( abs(D_tot(3)) < abs(smallest_D) ) then
smallest_D = D_tot(3)
end if
levelset(j) = -1 * smallest_D ! clockwise, multiply with * -1
end do
end function levelset





























