Embed Size (px)
Citation preview

1
Linear Quadratic Gaussian Control of a Quarter-Car Suspension
Mohamed M. ElMadany* & Zuhair S. Abduljabbar**
* Professor ** Associate Professor
Mechanical Engineering Department King Saud University
P.O. Box 800, Riyadh 11421 Saudi Arabia
Fax: 966 1 4676652 Email: [email protected]
SUMMARY
This paper presents a method for designing linear multivariable controllers
in the frequency-domain for an intelligent controlled suspension system for a
quarter-car model. The design methodology uses singular value inequalities and
optimal control theory. The vehicle system is augmented with additional
dynamics in the form of an integrator to affect the loop shapes of the system. The
measurements are assumed to be obtained in a noisy state, and the optimal control
gain and the Kalman filter gain are derived using system dynamics and noise
statistics. A combination of singular value analysis, eigenvalue analysis, time
response, and power spectral densities of random response is used to describe the
performance of the active suspension systems.
Keywords: Active suspension design, Intelligent controlled suspensions, LQG
control of vehicles.
2
INTRODUCTION
The development of design techniques for the synthesis of active vehicle
suspension systems has been an active area of research over the last two decades
[1-8]. In particular, the development of robust controllers in order to improve the
well known trade-offs between ride comfort, controllability and road safety has
been pursued in Refs. [9-14]. Two major problems are encountered in applying
linear quadratic regulator (LQR) theory to the design of vehicle suspensions. The
first problem occurs when some of the feedback states are not available, which
may be deduced from an estimator (filter). However, the guaranteed gain and
phase margin results of the LQR [15] may decrease markedly when the estimator
is included. References [15-19] discuss some of the techniques used to solve this
problem, and show that the proper choice of the estimator gains allows the
guaranteed gain and phase results of the full state feedback LQR to be obtained
asymptotically.
The second problem arises from the fact that the actively controlled
system does not have zero steady-state axle to body deflection in response to
external body force due to payload variations, braking, accelerating or cornering
forces. In order to overcome this limitation, Davis and Thompson [9] and
ElMadany [10, 11], assuming full state feedback, derived optimal suspension
systems using multivariable integral control. The control law consists of two
parts. The first is an integral controller acting on suspension deflection to ensure
zero steady-state offset due to body and maneuvering forces as well as due to road
3
ramp inputs. The second part is a state variable feedback controller for vibration
control and performance improvements. By introducing integral compensation in
the state space, a controllable state space is chosen so that all of the states that are
used in the LQR problem have a zero steady-state equilibrium. With this state
space, the infinite time quadratic performance index is well behaved, the
robustness properties for the full state feedback regulator apply, and the resulting
controller will have zero steady-state errors in the presence of parameter
uncertainty, [16]. Further development and investigation of the integral
compensation problem, however, is needed.
In this work, as opposed to earlier studies [9-11], measurement errors are
taken into consideration. The case of incomplete and noisy measurements is
treated and the optimal state observer is derived. A design method is proposed for
designing linear multivariable integral controllers for an intelligent controlled
suspension system. The method is based on a frequency-domain design
methodology using singular value inequalities and optimal control theory.
In what follows, the vehicle suspension problem is described, and the
design methodology to synthesize the compensator and estimator gains is
presented along with an analysis of the performance and robustness
characteristics. The compensator allows set point control with command
following. The estimator design is performed in the framework of the Kalman
filter formalism. Loop transfer recovery is used to try to recover the desired
degree of robustness to uncertainty. The technique is applied to design the
controller for the state augmented vehicle suspension system with limited state
4
feedback and noisy measurements. The system performance is computed and
compared with passive and fully active with and without integral control systems
by numerical simulation.
VEHICLE SUSPENSION PROBLEM
The quarter-car model is often adequate in preliminary studies of vehicle
ride dynamics [1-4]. Despite its simplicity, it captures the most basic features of
the real vehicle problem, leads to a basic understanding of the limitations to
suspension performance, and allows to set the line of thinking in the design of
suspensions which accords with experience. However, when a detailed study of
the motion of the vehicle is required, and when the features which are implicitly
omitted from the quarter-car model need to be assessed, more elaborate models
(two-or-three-dimensional models) should be considered.
A two-degree-of-freedom vehicle suspension representing a quarter-car is
shown in Fig. 1. The sprung and unsprung masses are denoted by m1 and m2,
respectively. The suspension spring stiffness and damping coefficients are given
by k and c respectively, while the tire is modelled as a linear spring with stiffness
kt. The variable u denotes an active control force applied between the body and
axle.
The vehicle is assumed to travel at a constant forward speed over a
random road surface, which is approximated by an integrated white noise input
[20]. Hence, the vertical road velocity disturbance, vi, is modelled as a white-
noise input and it is specified by

5
(1a) [ ]E v ti ( ) = 0
(1b) ( ) ( )[ ] (E v t v t V t ti i1 2 1 2= −δ )
where E[.] denotes the expectation operator and δ(.) is the Dirac delta function.
The states are selected as x1 being the distance between the sprung and
unsprung masses (suspension travel), x2 being the distance between the unsprung
mass and the road surface (tire deflection), x3 being the sprung mass absolute
velocity, and x4 being the unsprung mass absolute velocity.
The state space representation of the system is
DvBuAxx ++=& (2a)
y = Cx (2b)
z = Hx + Γη (2c)
The dependence of variables on time t is suppressed in the interest of brevity,
where
A km
cm
cm
km
km
cm
cm
t
=
−
−−
− −
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥
0 0 1 1
0 0 0 1
01 1
2 2 2 2
1,
Bm m
T=
−⎡
⎣⎢
⎤
⎦⎥0 0 1 1
1 2,
, [ ] [ ]D CT= =0 1 0 0 1 0 0 0,
[ ] [ ]H = =1 0 0 0 1 0 0 0, Γ
η is a zero mean random process with normal distribution with intensity Rη, i.e.,

6
( ) ( )[ ] ( )E t t R t tη η δη1 2 1 2= − (3)
The expression y represents commanded quantities. The measurements z are used
for state reconstruction via the Kalman filter.
A control law of the form
u K x K xs i e= − − (4)
is sought, where , r represents reference commands, K( )x y reo
t= −∫ dt
dt
s is the
proportional state feedback gain matrix, and Ki is the integral control gain matrix.
The problem is well posed if the pair (A, B) is stabilizable, and if (H, A) and (C,
A) are detectable.
The gain matrices Ks and Ki are determined by augmenting the state with
(5) ( )x y reo
t= −∫
giving, when r is zero,
vD
uB
xx
CA
xx
ee⎥⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡000
0&
&
or (6) vDuBxAx ˆˆˆˆˆ ++=&
The suspension system is optimized with respect to ride comfort, suspension
travel (working space), road contact, controlling variation of vehicle height
(overall system stiffness), and control force. A performance index of the
following form is used
( ) ⎥⎦
⎤⎢⎣
⎡++++= ∫∞→
dtuxqxqxqxET
J e
T
oT
223
222
211
232
1lim ρ& (7)

7
where q1, q2, q3, and ρ are the weights on working space, road contact (tire
deflection), overall system stiffness, and control force, respectively. They govern
the relative importance attached to the various components of the optimality
criterion.
In matrix form, the performance index is given by
[ ] ⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡= ∫∞→
dtux
RNNQ
uxET
Jc
TTT
T
oT
ˆˆ
21lim (8)
with Q, Rc are symmetric, Rc is positive definite, Q is positive semi-definite, and
N is a constant matrix.
where
Qm
k q m kc kc
q m
kc c c
kc c c
q m
=
+ −
− −
−
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥⎥
1
0 0
0 0 0
0 0
0 0
0 0 0 0
12
21 1
2
2 12
2 2
2 2
3 12
0
[ ]Nm
k c c T= −1 0 012 ,
Rm
c = +1
12 ρ
The control gain of the compensator that minimizes J for the system (6),
with full state feedback and perfect measurements, is given by
[ ] [ ]xKKxPBNRu iscTT
c ˆˆˆ1 =+−= − (9)
where Pc is a positive definite solution of

8
(10) 0ˆ 1 =+−+ −ncccc
Tnnc QPRBPPAAP
where A A BR N Q Q N R Nn cT
n cT= − = − ≥− −$ $ ,1 1 0 .
The design of the compensator reduces to the selection of the matrices Qn
and Rc satisfying the performance and robustness constraints prescribed for the
closed-loop system. The closed-loop system is described by
(11) vDxAx cˆˆˆ +=&
where ( )cTT
cc PBNRBAA ˆˆˆ 1 +−= −.
Since the state variables are not completely accessible from the direct
measurements, and the measurements are corrupted by noise, an estimator is
designed.
The estimator gain is given by
(12) K P H Re eT
e= −1
where the matrix Pe satisfies the Riccati equation
(13) [ ] [ ]A I P P A I P H R HP Qe e e eT
eT
e e e+ + + − +−α α 1 0=
The estimator is a Kalman filter for the plant with A replaced by [A + Iαe]. The
positive scalar αe guarantees that the eigvenvalues of [A - Ke H] (the estimator
eigenvalues) have real parts to the left of -αe.
Here Qe, and Re are given by
Qe = DVDT (14)
and Re = Γ Rη ΓT (15)
9
COMPENSATOR DESIGN
The compensator configuration with full state feedback is shown in Fig. 2.
The design of a controller with good command following properties requires R(s)
= Y(s) over the range of frequencies contained in typical inputs. From Fig. 2,
Y(s) may be written as
( )[ ] ( )Y s I CG s B I K G s B G s CG s B I K G s B G s R ss y s y( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )= + + +− − −1 1 1
(16)
where G(s) = (sI - A)-1, and Gy(s) = Ki(sI)-1.
Good command following demands
( )[σ CG s B I K G s B G ss y( ) ( ) ( )+ −1 1] >> (17)
where σ represents the minimum singular value. It is found from the
corresponding square roots of the eigenvalues of the Hermitian matrix. In
equation (17), a transfer function appears, which corresponds to breaking the error
loop at the xx shown at point 2 in Fig. 2 and synthesizing the open-loop transfer
function from ′E s( ) to with R(s) = 0. The singular values may be altered
directly by modifying the weights in the solution of the algebraic Riccati equation
until the minimum singular value has a satisfactory gain over all frequencies of
interest.
′′E s( )
The controller should also possess a certain degree of robustness to low-
frequency modeling errors as shown in Fig. 2 by De(s). The relationship between
E(s) and De(s), which should be made as small as possible, is given by
10
( )[ ]E s I CG s B I K G s B G s D ss y( ) ( ) ( ) ( ) ( )= − + + −e
−1 1 (18)
which illustrates that the condition specified in Eq. (17) for good command
following is sufficient to guarantee disturbance rejection resulting from low-
frequency modeling errors.
The impact of modeling errors reflected at the plant input and sensor noise
may be minimized by considering the control input equation
(19) [U s I K G s B G s C G s B D ss y( ) ( ) ( ) ( ) ( )= + +−1] m
where Dm(s) represents both plant uncertainties and noise disturbances.
Equation (19) shows that disturbance rejection at the input corresponds to
selecting the regulator weights such that
[σ K G s B G s CG s Bs y( ) ( ) ( )+ 1] >> (20)
over the frequencies where Dm(s) has the majority of its energy. The transfer
function in Eq. (20) may result from breaking the loop at point 1 and synthesizing
the relation from to with R(s) = 0, in Fig. 2. ′U s( ) ′′U s( )
Therefore, based on the above analysis, the singular values of two
different transfer functions, (17) and (20), must be designed simultaneously, in
order to obtain a controller with good command following and robustness to
modelling errors and plant disturbances.
ESTIMATOR DESIGN
11
Since all plant states are not measurable, a Kalman filter may be used to
realize the full state feedback controller. From Fig. 3, the transfer function from
η(s) to E(s) with R(s) = 0 is
E s CG s B I G s CG s B K I G s K H G s B K HG s B
I G s CG s B K G s K s
y s e e
y s e
( ) ( ) [ ( ) ( ) ] { ( ) ( )( ( ) )
[ ( ) ( ) ] } ( ) ( )
= + + + +
+
−
− −
1
1 1 η
×
(21)
The impact of sensor noise on the error can be minimized by making
σ( ( ) [ ( ) ( ) ] { ( ) ( )( ( ) )
( ( ) ( ) ] } ( ) )
CG s B I G s CG s B K I G s K H G s B K HG s B
I G s CG s B K G s K
y s e e
y s e
+ + + +
× + <<
−
− −
1
1 1 1
(22)
over frequencies where η(s) has its energy.
For recovery, the estimator gain Ke is chosen such that A - KeH is stable,
and the performance of the combined regulator/estimator matches that of full state
feedback design.
In the design method of loop transfer recovery (LTR), the linear quadratic
regulator (LQR) transfer properties are asymptotically recovered in the linear
quadratic Gaussian (LQG) system for systems with minimum phase transmission
zeros [18]. Typically, when the loop transfer recovery (LTR) technique is
applied, the Kalman filter is synthesized by setting D = B, Rη = I and V = q.
Change q until the return ratio at the input of the compensated plant has
converged sufficiently closely to -Kc(sI-A)-1B over a sufficiently large range of
frequencies, and at the same time the resulting Kalman filter gain Ke satisfies Eq.
12
(22). However, for the problem in hand, D was not set equal to B, and therefore
full recovery was not possible.
RESULTS AND DISCUSSIONS
This paper develops a design method suited to the purpose of controller
synthesis for an intelligent active suspension system. The controller must provide
zero steady-state suspension deflection for external forces and road ramp input,
perform well over a variety of road conditions, be multi-objective, and be
insensitive to modelling errors.
The baseline values for the parameters of the quarter-car model used in the
numerical calculations are given below [9].
Sprung mass, m1 = 288.9 kg
Unsprung mass, m2 = 28.58 kg
Tire spring rate, kt = 155900 N/m
Suspension spring rate for passive system (baseline), k = 19960 N/m
Suspension damping rate for passive system (baseline), c = 1300 Ns/m
Suspension spring rate for active system, k = 10, 000 N/m
Suspension damping rate for active system, c = 850 Ns/m.
The inclusion of passive elements together with active elements would serve two
purposes: provide some degree of reliability, and reduce the power demand
needed for the operation of active elements. The passive elements are selected to
13
provide a minimal level of performance and safety; then the active elements can
be designed to further improve the performance.
It is well known that, for both active and passive suspension systems, the
constraint placed on the damping ratio of the wheel-hop mode limits the extent to
which the sprung mass acceleration can be reduced. For very lightly damped
wheel motion, however, the road-holding ability is degraded. Ref. [6] suggested a
damping ratio of 0.2 as the lower limit for the damping of the wheel-hop mode.
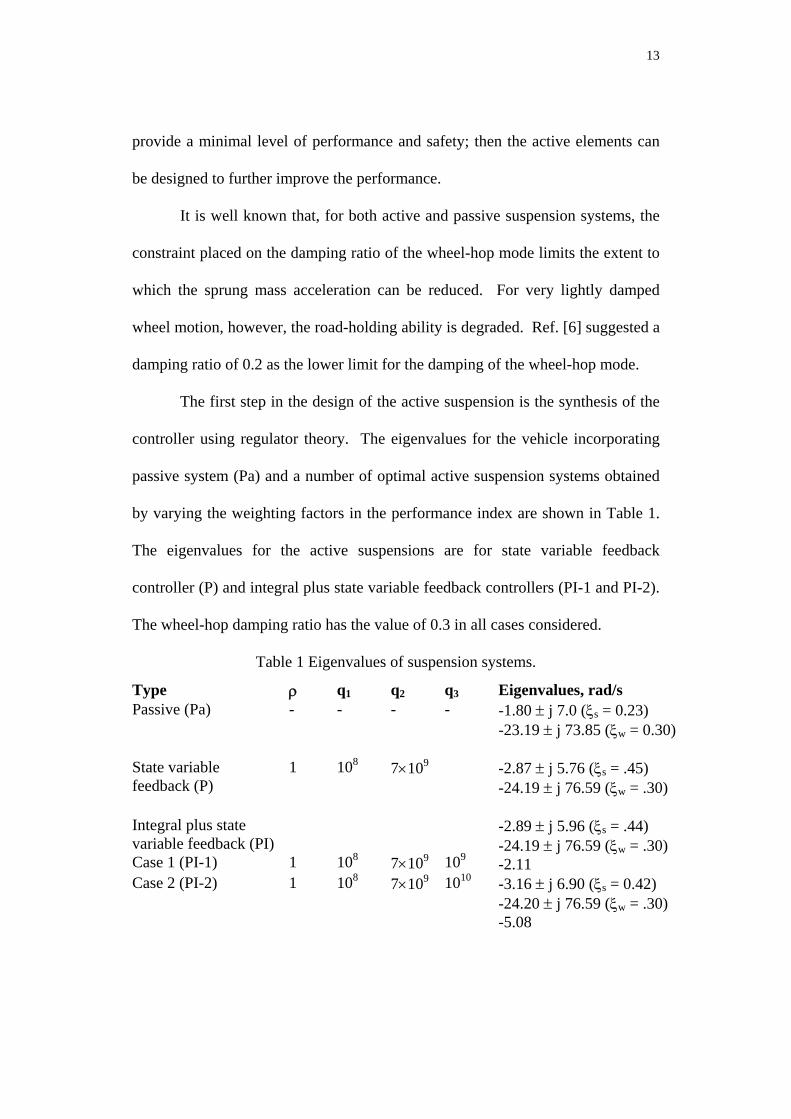
The first step in the design of the active suspension is the synthesis of the
controller using regulator theory. The eigenvalues for the vehicle incorporating
passive system (Pa) and a number of optimal active suspension systems obtained
by varying the weighting factors in the performance index are shown in Table 1.
The eigenvalues for the active suspensions are for state variable feedback
controller (P) and integral plus state variable feedback controllers (PI-1 and PI-2).
The wheel-hop damping ratio has the value of 0.3 in all cases considered.
Table 1 Eigenvalues of suspension systems.
Type ρ q1 q2 q3 Eigenvalues, rad/s Passive (Pa) - - - - -1.80 ± j 7.0 (ξs = 0.23)
-23.19 ± j 73.85 (ξw = 0.30)
State variable feedback (P)
1 108 7×109 -2.87 ± j 5.76 (ξs = .45) -24.19 ± j 76.59 (ξw = .30)
Integral plus state variable feedback (PI) Case 1 (PI-1)
1
108
7×109
109
-2.89 ± j 5.96 (ξs = .44) -24.19 ± j 76.59 (ξw = .30) -2.11
Case 2 (PI-2) 1 108 7×109 1010 -3.16 ± j 6.90 (ξs = 0.42) -24.20 ± j 76.59 (ξw = .30) -5.08
14
The results of the full state feedback design of the integral plus state
variable feedback controller are shown in Figs. 4 and 5. The curves of the
singular values provide a measure of the robustness in the controller. The
weighting parameters q1, q2, q3 and ρ must be chosen to satisfy Eqs. (17) and (20)
over a specified frequency range. The effect of selecting ρ = 1, q1 = 108, q2 =
7×109 and three values of q3 on the minimum singular values of the closed-loop
system with loop broken at point 2 is shown in Fig. 4. By selecting q3 =1010, Eq.
(17) is satisfied up to 1 rad/s. Fig. 5 shows singular values of the closed-loop
system with loop broken at point 1, which illustrates that Eq. (20) is satisfied over
a broad range of frequencies for robustness. It is clear that the higher the value of
the weighting parameter q3, the most robust the controller will be.
The selection of z = x1 for state reconstruction results in an invertible
realization {A, B, H}. The objective of the nominal design of the estimator is to
choose αe, Qe = DVDT, and Re = ΓRηΓT such that Eq. (22) is satisfied over all
frequencies. A nominal design using αe = 2, V = 2π(20×10-6), and Rη = 10-10
gave the singular value plots for sensor noise rejection shown in Fig. 6. However,
Fig. 5 shows that the introduction of the estimator leads to lowering the minimum
singular value of Eq. (20), indicating degradation in the robustness of the
controller.
The responses of the different vehicle suspension designs to an applied
step force of 1000 N are shown in Fig. 7. Full state feedback is assumed for the
actively suspended vehicles. It can be seen that the PI controller provides a zero
steady-state offset, and the actively controller system reacts quickly to the applied
15
load with increasing the weighting q3. It can also be seen that the body
acceleration oscillation dies quickly for the PI controllers compared to the P
controller. A control force of 1000 N is generated to counteract the applied force.
While the system with P controller requires almost exclusively dissipation of
energy, the system with PI controller calls for supply of power in part of the
response time. The peak power demand for the P controller is larger than the one
for PI controller.
Figure 8 shows the time responses of the passively and actively controlled
suspensions to a unit step velocity, which is equivalent to a unit ramp
displacement input at the tire-road interface. The results are obtained for full state
feedback and perfect measurements. The suspension deflection for the actively
suspended vehicle with P controller exhibits a steady-state offset, while the use of
PI controller give zero steady-state error. Increasing q3 in PI controller design
results in reduction in the overshoot of the suspension deflection. The body
acceleration is well damped for the actively controlled vehicles compared with the
passively suspended vehicle. Large values of initial control force and power are
demanded for the PI controller compared with the counterparts for P controller.
However, no steady-state control force is required for PI controller, while a
constant force of about 500 N is needed for P controller. The behaviour of the
curves representing tire deflection (not shown here) is very much similar to the
corresponding ones for body acceleration.
The effect of the design of the estimator on the performance of the vehicle
system with PI controller Case 1 is shown in Figures 9 and 10. The nominal
16
design values of αe=2 and V = 2π(20×10-6) together with two values of Rη of 10-7
and 10-10 are used. In general, in comparison with full state feedback and perfect
measurements, delay and degradation in the responses of the system incorporating
state estimator may be seen. Larger control forces and more control power
(dissipated and added) are needed for the system with state estimator. By
increasing Rη, the performance is worsened in terms of maximum amplitudes and
settling times. It is found that changing V from 2π(20×10-6) to 2π(20×10-8) will
have similar effect on performance as changing Rη from 10-10 to 10-7.
Figure 11 shows the response spectra for the passive and actively
controlled suspensions with full state feedback. The sprung mass acceleration
spectra for the actively suspended vehicle are attenuated well in the frequency
range of 0.8 to 3 Hz with negligible compromise of isolation at frequencies higher
than the wheel-hop frequency. The PI controller shows a less damped peak
associated with the sprung mass mode. The power spectra of the suspension
deflection show attenuation of peak near body frequency for controlled
suspensions, accompanied with an increase in low frequency stroke response.
The introduction of the PI controller limits the low frequency suspension
response, but it is still higher than the passive system. It can be seen that the tire
deflection is largely improved by the controlled suspension over the frequency
range up to the wheel resonance frequency. The power spectral densities for the
control force show that, in the low frequency range 0.1 to 0.8 Hz, the control
force demand using PI controller is larger than the P controller, while the opposite
is true in the frequency range of 0.8 to 12 Hz.
17
In Fig. 12 is shown a comparison of the power spectra of vehicle response
for the PI-1 controller. The results are obtained for full state feedback with
perfect measurement and state-controlled vehicle system with an estimator. As
can be seen from Fig. 12, the results are deteriorated by the introduction of the
estimator particularly at the body natural frequency. However, some
improvements in suspension deflection at low frequencies is noticed.
Figure 13 shows the rms body accelerations contained in successive one-
third octave bands. The results are obtained for the vehicle employing the PI-1
controller with and without an estimator. The ISO 4- and 8-h riding comfort
criteria are also shown in Fig. 13. The results presented in the figure show clearly
that the active suspension systems are able to meet the performance specifications
for the vehicle traveling at 20 m/s over such a quality of road as that under
investigation.
CONCLUSIONS
This study presents a frequency-domain design method using singular
value inequalities and optimal control theory for the design of controllers for
active suspension systems. Singular value analysis is used to evaluate the
command following and robustness to low-frequency modeling errors and noise
disturbances. The synthesis methodology provides a systematic procedure for
trading-off performance versus robustness in the linear quadratic Gaussian based
multivariable control design. The design method is applied to control the motion
of a quarter-car model subjected to both deterministic and stochastic environment.
18
The compensators allow command following with set point control that is
necessary to control the variation of vehicle height and the attitude change of the
vehicle. The results obtained demonstrate the effectiveness of the design method
and show the trade-off between robustness and sensor noise rejection in the
compensator. Therefore, a balance between robustness and sensor noise rejection
should be reached based on the anticipated operating environment.
The performance of the different vehicle suspension designs is evaluated
in the frequency and time domains showing good potential for the state variable
feedback plus integral controller in providing excellent attitude control without
sacrificing the good ride comfort offered by the state variable feedback
controllers. In general, moderate degradation in performance is noticed with the
introduction of the estimator designed using linear quadratic Gaussian theory.
Linear quadratic Gaussian and loop transfer recovery (LQG/LTR) technique has
been applied to recover the required degree of robustness to uncertainty reflected
at the plant input. However, because the command (suspension deflection
variable) was used for state reconstruction, i.e., the measurement variable was the
command variable, and because the excitation distribution matrix was not set
equal to the control distribution matrix, full recovery was not possible. This
limitation could be relaxed if a number of sensors such as suspension deflection,
body velocity, and wheel velocity are available for feedback. Command
variables, sensor set and measurement accuracy are issues that warrant further
investigation.

19
ACKNOWLEDGMENT
The authors would like to thank the Research Center, King Saud
University, for supporting this research.
REFERENCES
1.Hac, A.: Suspension optimization of a 2-dof vehicle model using a stochastic
optimal control technique. Journal of Sound and Vibration. 100(3), (1985),
pp 343-357.
2.Wilson, D.A., Sharp, R.S., and Hassan, S.A.: Application of linear optimal
control theory to design of active automotive suspensions. Vehicle System
Dynamics, 15, 2, (1986), pp 103-118.
3.Hrovat, D., and Hubbard, M.: A comparison between jerk optimal and
acceleration optimal vibration isolation. Journal of Sound & Vibration,
112(2) (1987), pp 201-210.
4.Sharp, R.S., and Crolla, D.A.: Road vehicle suspension design - a review.
Vehicle System Dynamics, 16 (1987), pp 167-192.
5.Yue, C., Butsuen T., and Hedrick, J.K.: Alternative control laws for automotive
active suspensions, ASME, Journal of Dynamic Systems, Measurement and
Control, 111 (1989), pp 286-291.
6.Chalasani, R.M.: Ride performance potential of active suspension systems - Part
I: Simplified analysis based on a quarter-car model. ASME Monograph,
AMD - vol. 80, DSC - vol. 2, (1986), pp 206-234.

20
7.Hac, A., Youn, I., and Chen, H.H.: Control of suspension for vehicles with
flexible bodies - Part I: active suspensions. ASME, Journal of Dynamic
Systems, Measurement and Control, 118 (1996), pp 508-517.
8.Rutledge, D.C., Hubbard, M., and Hrovat, D.: A two dof model for jerk optimal
vehicle suspensions. Vehicle System Dynamics, 25(1996), pp. 113-136.
9.Davis, B.R., and Thompson, A.G.: Optimal linear active suspension with
integral constraint. Vehicle System Dynamics 17(1988), pp 193-210.
10.ElMadany, M.M.: Optimal linear active suspensions with multivariable
integral control. Vehicle System Dynamics 19 (1990), pp 313-329.
11.ElMadany, M.M.: Integral and state variable feedback controllers for improved
performance in automotive vehicles. Computers & Structures, Vol. 42, No. 2
(1992), pp 237-244.
12.Kiriczi, S.B., and Kashani, R.: Robust control of active car suspension with
model uncertainty using H∞ methods, Advanced Automotive Technologies.
Velinsky et al. Eds. DE-vol. 40, The ASME Bk#H00719 (1991), pp 375-390.
13.Kashani, R., and Kiriczi, S.: Robust stability analysis of LQG-controlled active
suspension with model uncertainty using structured singular value, μ,
method. Vehicle System Dynamics, 21 (1992), pp 361-384.
14.ElMadany, M.M., and Yigit, A.S.: Robust control of linear active suspensions.
Journal of Canadian Society of Mechanical Engineers, Vol. 17, No. 4B,
(1993), pp. 759-773.
21
15.Safonov, M.G., and Athans, M.: Gain and phase margin for multiloop LQG
regulators. IEEE Transactions on Automatic Control, AC-22 (1977), pp 173-
179.
16. Lehtomaki, N., Sandell, N., and Athans, M.: Robustness results in linear-
quadratic Gaussian based multivariable control design. IEEE Transactions
on Automatic Control, AC-26 (1981), pp 47-65.
17. Doyle, J., and Stein, G,: Multivariable feedback design: concepts for a
classical/ modern synthesis. IEEE Transactions on Automatic Control, AC-
26 (1981), pp 4-16.
18. Stein, G., and Athans, M.: The LQG/LTR procedure for multivariable
feedback control design. IEEE Transactions on Automatic Control, AC-32
(1987).
19. Maciejowski, J.M.: Multivariable Feedback Design. Addison Wesley,
Essex, 1989.
20. Wong, Y.J.: Theory of Ground Vehicles. New York, Wiley-Interscience,
1978.
22
List of Figures
Fig. 1 Linear quarter-car model. Fig. 2 Compensator with full state feedback. Fig. 3 Compensator with Kalman filter. Fig. 4 Minimum singular values of closed-loop system with loop broken at point
2. Fig. 5 Singular values of closed-loop system with loop broken at point 1. Fig. 6 Maximum singular values for sensor noise rejection. Fig. 7 Response of passively and actively suspended vehicles, full state feedback
for active systems- step body force of 1000 N. [Key: ___ Pa; P; PI-1; PI-2]. Fig. 8 Response of passively and actively suspended vehicles, full state feedback
for active systems - unit step velocity input. [Key: ___ Pa; P; PI-1; PI-2]. Fig. 9 Effect of estimator design on responses of vehicle with PI-1 controller-
step body force of 1000 N. [Key: ___ full state feedback; with estimator Rη = 10-7; with estimator, Rη = 10-10].
Fig. 10 Effect of estimator design on responses of vehicle with PI-1 controller-unit
step velocity input. [Key: ___ full state feedback; --- with estimator Rη = 10-7; with estimator, Rη = 10-10].
Fig. 11 Response power spectra for passively and actively suspended vehicles -
full state feedback for active systems. [Key: ___ Pa; P; PI-1; PI-2]. Fig. 12 Effect of estimator design on response power spectra for vehicle with PI-1
controller. [Key: ___ φυλλ στατε φεεδβαχκ; ωιτη εστιμτορ, Ρη = 10-7]. Fig. 13 One-third octave band rms body acceleration for vehicle with PI-1
controller.
























![Solid Mensuration [QEE-R 2012]](https://img.pdfslide.net/doc/110x75/55657440d8b42a95028b49ac/solid-mensuration-qee-r-2012.jpg)

![College Algebra [QEE-R 2012]](https://img.pdfslide.net/doc/110x75/54c3827e4a79598b558b4593/college-algebra-qee-r-2012.jpg)
![Chemistry [QEE-R 2012]](https://img.pdfslide.net/doc/110x75/55a44a681a28ab80028b46dc/chemistry-qee-r-2012.jpg)

