Embed Size (px)
Citation preview
![Page 1: LMI optimization approach to stabilization of Genesio–Tesi ...ynucc.yu.ac.kr/~jessie/temp/amc08_1.pdf · The Genesio–Tesi system, proposed by Genesio and Tesi [14], is one of](https://reader036.pdfslide.net/reader036/viewer/2022071411/61067f0ae6640310ce3a4188/html5/thumbnails/1.jpg)
Available online at www.sciencedirect.com
Applied Mathematics and Computation 196 (2008) 200–206
www.elsevier.com/locate/amc
LMI optimization approach to stabilization ofGenesio–Tesi chaotic system via dynamic controller
Ju H. Park a,*, O.M. Kwon b, S.M. Lee c
a Robust Control and Nonlinear Dynamics Laboratory, Department of Electrical Engineering, Yeungnam University,
214-1 Dae-Dong, Kyongsan 712-749, Republic of Koreab School of Electrical and Computer Engineering, 12 Gaeshin-Dong, Heungduk-Gu, Chungbuk National University,
Cheongju, Republic of Koreac Platform Verification Division, BcN Business Unit, KT Co. Ltd., Daejeon, Republic of Korea
Abstract
In this paper, a design method for a new controller to control the Genesio–Tesi chaotic systems is proposed. In thiswork, a dynamic outputs feedback controller for the system is developed for the first time. For stability analysis, awell-known Lyapunov stability theorem combining with LMI (linear matrix inequality) optimization approach is utilized.A numerical simulation is presented to show the usefulness of the proposed control scheme.� 2007 Elsevier Inc. All rights reserved.
Keywords: LMI optimization; Genesio–Tesi system; Chaos; Stabilization; Dynamic controller
1. Introduction
Chaos is very interesting nonlinear phenomenon and has applications in many areas such as biology, eco-nomics, signal generator design, secure communication, many other engineering systems, and so on. Because anonlinear system in the chaotic state is very sensitive to its initial condition and chaos causes often irregularbehavior in practical systems, chaos is sometimes undesirable. Thus, one may wish to avoid and eliminate suchbehavior. Therefore, many chaotic systems including Chen system, Rossler system, Lorenz system, unifiedchaotic systems, and so on, have been extensively analyzed over the past decades [1–13]. However, most ofcontrol problems for various chaotic systems is only focused on the design of static controller without dynam-ics. In some situations, there is a strong need to construct dynamic controller instead of static controller inorder to obtain better performance and dynamical behavior of state response. To the best knowledge ofauthors, the topic of dynamic output feedback control for chaotic systems has not been investigated yet.
This paper considers the stabilization of a class of nonlinear chaotic systems, Genesio–Tesi system, studiedin [14]. We propose a dynamic controller to control the system using the Lyapunov stability theory. The
0096-3003/$ - see front matter � 2007 Elsevier Inc. All rights reserved.
doi:10.1016/j.amc.2007.05.045
* Corresponding author.E-mail address: [email protected] (J.H. Park).
![Page 2: LMI optimization approach to stabilization of Genesio–Tesi ...ynucc.yu.ac.kr/~jessie/temp/amc08_1.pdf · The Genesio–Tesi system, proposed by Genesio and Tesi [14], is one of](https://reader036.pdfslide.net/reader036/viewer/2022071411/61067f0ae6640310ce3a4188/html5/thumbnails/2.jpg)
J.H. Park et al. / Applied Mathematics and Computation 196 (2008) 200–206 201
existence condition of such controller is derived in terms of linear matrix inequalities (LMIs). The LMI can beeasily solved by various convex optimization algorithms [17]. Especially, in order to solve the LMIs, we utilizethe LMI control toolbox which implements the interior-point algorithms with fast convergence [16].
Through the paper, Rn denotes n-dimensional Euclidean space, and Rn�m is the set of all n · m real matri-ces. X < 0 means that X is a real symmetric negative definitive matrix. I denotes the identity matrix with appro-priate dimensions. kÆk refers to Euclidean vector norm or the induced matrix 2-norm.
The organization of this paper is as follows. In Section 2, the problem statement and controller designmethod are presented. In Section 3, we provide a numerical example to demonstrate the usefulness of the pro-posed method. Finally concluding remark is given.
2. Controller design
The Genesio–Tesi system, proposed by Genesio and Tesi [14], is one of paradigms of chaos since it capturesmany features of chaotic systems. It includes a simple square part and three simple ordinary differential equa-tions that depend on three positive real parameters. The dynamic equation of the system is as follows:
_x1 ¼ x2;
_x2 ¼ x3;
_x3 ¼ �cx1 � bx2 � ax3 þ x21;
8><>: ð1Þ
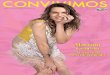
where xi, i = 1,2,3 are state variables, and a, b and c are the positive real constants satisfying ab < c. Forinstance, the system is chaotic for the parameters a = 1.2, b = 2.92, c = 6. For the initial condition(x1,x2,x3) = (0.2,�0.3,0.1), the chaotic motion of the system is illustrated in Figs. 1 and 2.
In order to control the chaotic behavior in Genesio–Tesi system, we have the following control system:
_xðtÞ ¼ AxðtÞ þ DAxðtÞ þ BuðtÞ;yðtÞ ¼ CxðtÞ;
ð2Þ
0 5 10 15 20 25 30 35 40
0
5
10x
1(t)
0 5 10 15 20 25 30 35 40
0
5
10x
2(t)
0 5 10 15 20 25 30 35 40
0
10
20
t(sec)
x3(t)
Fig. 1. Chaotic motions.
![Page 3: LMI optimization approach to stabilization of Genesio–Tesi ...ynucc.yu.ac.kr/~jessie/temp/amc08_1.pdf · The Genesio–Tesi system, proposed by Genesio and Tesi [14], is one of](https://reader036.pdfslide.net/reader036/viewer/2022071411/61067f0ae6640310ce3a4188/html5/thumbnails/3.jpg)
0 2 4 6 8
0
2
4
6
8
10
x1
x 2
0 5 10
0
5
10
15
x2
x 3
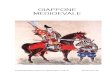
Fig. 2. Chaotic attractors on (x1,x2) and (x2,x3) planes.
202 J.H. Park et al. / Applied Mathematics and Computation 196 (2008) 200–206
where x(t) is the state vector, u(t) is the feedback control law, y(t) is the output vector, B 2 Rn�m is the inputmatrix, C 2 Rp�n is the output matrix, and
xðtÞ ¼x1
x2
x3
264375; A ¼
0 1 0
0 0 1
�c �b �a
264375; B ¼
0
0
a
264375; DA ¼
0 0 0
0 0 0
x1 0 0
264375:
Note that the real parameter a in input matrix B is a weighting parameter.Now, in order to stabilize system Eq. (1), let’s consider the following dynamic output feedback controllers:
_nðtÞ ¼ AcnðtÞ þ BcyðtÞ;uðtÞ ¼ CcnðtÞ;
ð3Þ
where nðtÞ 2 Rn is the controller state, and Ac, Bc and Cc are gain matrices with appropriate dimensions to bedetermined later.
Applying this controller Eq. (3) to system Eq. (1) results in the closed-loop system
_zðtÞ ¼ AzðtÞ þ DAzðtÞ; ð4Þ
where
zðtÞ ¼xðtÞnðtÞ
� �; A ¼
A BCc
BcC Ac
� �; DA ¼
DA 0
0 0
� �:
Remark 1. Since, a chaotic system has bounded trajectories, there exists a constant m such that
kDAk ¼ kDAk ¼ kx1k 6 m: ð5Þ
Then, we have the following main result.![Page 4: LMI optimization approach to stabilization of Genesio–Tesi ...ynucc.yu.ac.kr/~jessie/temp/amc08_1.pdf · The Genesio–Tesi system, proposed by Genesio and Tesi [14], is one of](https://reader036.pdfslide.net/reader036/viewer/2022071411/61067f0ae6640310ce3a4188/html5/thumbnails/4.jpg)
J.H. Park et al. / Applied Mathematics and Computation 196 (2008) 200–206 203
Theorem 1. For given a constant m, there exists a dynamic output feedback controller Eq. (3) for stabilizationof the origin of the system Eq. (1) if there exist positive-definite matrices S, Y and matrices bA; bB; bC satisfyingthe following LMIs:
AY þ YAT þ BbC þ bCT BT þ 2mY Aþ bAT þ 2mI
H SAþ AT S þ bBC þ CT bBT þ 2mS
" #< 0 ð6Þ
and
Y I
I S
� �> 0: ð7Þ
Proof. Let us consider the following legitimate Lyapunov functional candidate:
V ¼ zT ðtÞPzðtÞ; ð8Þ
where P > 0.Taking the time derivative of V along the solution of Eq. (1), we have
dVdt¼ 2zT ðtÞP _zðtÞ ¼ zT ðtÞ PAþ AT P
� �zðtÞ þ 2zT ðtÞPDAzðtÞ
6 zT ðtÞ PAþ AT P þ 2mP� �
zðtÞ � zT ðtÞRzðtÞ: ð9Þ
Thus, if the inequality R < 0 holds, there exists a positive scalar c such that
dVdt6 �ckxðtÞk2
: ð10Þ
In the matrix R, the matrix P > 0 and the controller parameters Ac, Bc and Cc, which included in the matrix �A,are unknown and occur in nonlinear fashion. Hence, the inequality R < 0 cannot be considered as an linearmatrix inequality problem. In the following, we will use a method of changing variables such that the inequal-ity can be solved as convex optimization algorithm [15].
First, partition the matrix P and its inverse as
P ¼S N
N T U
� �; P�1 ¼
Y M
MT W
� �; ð11Þ
where S; Y 2 Rn�n are positive-definite matrices, and M and N are invertible matrices. Note that the equalityP�1P = I gives that
MN T ¼ I � YS: ð12Þ
Define
F 1 ¼Y I
MT 0
� �; F 2 ¼
I S
0 N T
� �: ð13Þ
Then, it follows that
PF 1 ¼ F 2; F T1 PF 1 ¼ F T
1 F 2 ¼Y I
I S
� �> 0: ð14Þ
Now, postmultiplying and premultiplying the matrix inequality, R < 0, by the matrix F T1 and by its transpose,
respectively, gives
F T2 AF 1 þ F T
1 AT F 2 þ 2mF T2 F 1 < 0: ð15Þ
![Page 5: LMI optimization approach to stabilization of Genesio–Tesi ...ynucc.yu.ac.kr/~jessie/temp/amc08_1.pdf · The Genesio–Tesi system, proposed by Genesio and Tesi [14], is one of](https://reader036.pdfslide.net/reader036/viewer/2022071411/61067f0ae6640310ce3a4188/html5/thumbnails/5.jpg)
204 J.H. Park et al. / Applied Mathematics and Computation 196 (2008) 200–206
By utilizing the relation Eqs. (11)–(14), it can be easily obtained that the inequality Eq. (15) is equivalent to
C1 C2
H C3
� �< 0; ð16Þ
where
C1 ¼ AY þ YAT þ BCcMT þMCTc BT þ 2mY ;
C2 ¼ Aþ YAT S þMCTc BT S þ YCT BT
c N T þMATc N T þ 2mI ;
C3 ¼ SAþ NBcC þ AT S þ CT BTc NT þ 2mS:
By defining a new set of variables as follows:
bA ¼ SAY þ SBbC þ bBCY þ NAcMT ;bB ¼ NBc;bC ¼ CcMT ;
ð17Þ
then, Eq. (16) is simplified to the LMI Eq. (6). Finally, the LMI Eq. (7) is equivalent to the positiveness of P.This completes the proof. h
Remark 2. The problem of Theorem 1 is to determine whether the problem is feasible or not. It is called thefeasibility problem. The solutions of the problem can be found by solving eigenvalue problem in S; Y ; bA; bB andbC , which is a convex optimization problem. Note that a locally optimal point of a convex optimization prob-lem with strictly convex objective is globally optimal [17]. Various efficient convex optimization algorithms canbe used to check whether the matrix inequalities Eq. (6) and Eq. (7) is feasible. In this paper, in order to solveLMIs, we utilize Matlab’s LMI Control Toolbox [16], which implements state-of-the-art interior-point algo-rithms, which is significantly faster than classical convex optimization algorithms [17].
Remark 3. Given any solution of the LMIs Eqs. (6) and (7) in Theorem 1, a corresponding controller of theform Eq. (3) will be constructed as follows:
• Compute the invertible matrices M and N satisfying Eq. (12) using matrix algebra.• Utilizing the matrices M and N obtained above, solve the system of Eq. (17) for Bc, Cc and Ac (in this
order).
3. Numerical example
Consider the Genesio–Tesi chaotic system with:
A ¼0 1 0
0 0 1
�6 �2:9 �1:2
264375; B ¼
0
0
10
264375;
C ¼ 3 0:5 0½ �; DA ¼0 0 0
0 0 0
x1 0 0
264375; xð0Þ ¼ ½0:2� 0:3 0:1�T :
ð18Þ
As shown in Fig. 1, the system has chaotic behavior when the control input does not apply. Before designingthe dynamic controller Eq. (3) to control the Genesio–Tesi system to the origin, we assume that the magnitudeof state vector x1 is bounded as jx1j 6 6.
Now, we design a suitable dynamic output feedback controller of the form Eq. (3) for system Eq. (18),which guarantees the asymptotic stability of the closed-loop system. By applying Theorem 1 to the system
![Page 6: LMI optimization approach to stabilization of Genesio–Tesi ...ynucc.yu.ac.kr/~jessie/temp/amc08_1.pdf · The Genesio–Tesi system, proposed by Genesio and Tesi [14], is one of](https://reader036.pdfslide.net/reader036/viewer/2022071411/61067f0ae6640310ce3a4188/html5/thumbnails/6.jpg)
0 5 10 15 20 25 30 35 40
0
2
4
6 x1(t)
0 5 10 15 20 25 30 35 40
0x
2(t)
0 5 10 15 20 25 30 35 40
0
100
t(sec)
x3(t)
Fig. 3. System trajectories under the control.
J.H. Park et al. / Applied Mathematics and Computation 196 (2008) 200–206 205
Eq. (18) and checking the feasibility of the LMIs Eqs. (6) and (7), we can find that the LMIs are feasible viaLMI Control Toolbox [16] and obtain a possible set of solutions of the LMIs:
S ¼ 104 �1:5697 0:1829 0:0170
0:1829 0:0290 0:0022
0:0170 0:0022 0:0002
264375; Y ¼ 104 �
0:0003 �0:0022 0:0107
�0:0022 0:0186 �0:1298
0:0107 �0:1298 1:5637
264375;
bA ¼ �12:0000 0:0000 6:0000
�1:0000 �12:0000 2:9000
0:0000 �1:0000 �10:8000
264375; bB ¼ 104 �
�1:9212
�0:3780
�0:0368
264375;
bC ¼ 104 � 0:0095 �0:1208 �8:1185½ �:
Then, by further calculation in light of Remark 3, we have a possible stabilizing dynamic output feedback con-troller for the system Eq. (18):
Ac ¼�11:9784 �12:9033 �3:9342
�12:0370 �21:3254 �7:0490
1:9307 5:0234 �20:8518
264375; Bc ¼
�137:8396
�356:5511
�81:3638
264375; Cc ¼ 5:7045 16:7121 �1:1843½ �:
The simulation result is illustrated in Fig. 3 in which the control input is applied at t = 20 s. In the figures, onecan see that the system is indeed well stabilized to the origin.
4. Concluding remark
In this paper, we consider the controlled Genesio–Tesi chaotic systems. We have proposed a novel dynamicfeedback control scheme for asymptotic stability with respect to origin using the Lyapunov stability theory.Finally, a numerical simulation is provided to show the effectiveness of our method.
![Page 7: LMI optimization approach to stabilization of Genesio–Tesi ...ynucc.yu.ac.kr/~jessie/temp/amc08_1.pdf · The Genesio–Tesi system, proposed by Genesio and Tesi [14], is one of](https://reader036.pdfslide.net/reader036/viewer/2022071411/61067f0ae6640310ce3a4188/html5/thumbnails/7.jpg)
206 J.H. Park et al. / Applied Mathematics and Computation 196 (2008) 200–206
Acknowledgement
This research was supported by the Yeungnam University Research Grants in 2007.
References
[1] E. Ott, C. Grebogi, JA. Yorke, Controlling chaos, Phys. Rev. Lett. 64 (1990) 1196–1199.[2] H. Lu, Z. He, Chaotic behavior in first-order autonomous continuous-time systems with delay, IEEE Trans. Circuit Syst. 43 (1996)
700–702.[3] Y. Tian, F. Gao, Adaptive control of chaotic continuous-time systems with delay, Physica D 117 (1998) 1–12.[4] X.P. Guan, C.L. Chen, H.P. Peng, Z.P. Fan, Time-delayed feedback control of time-delay chaotic systems, Int. J. Bifurcat. Chaos 13
(2003) 193–205.[5] J. Sun, Delay-dependent stability criteria for time-delay chaotic systems via time-delay feedback control, Chaos Soliton. Fract. 32
(2007) 725–1734.[6] M. Sun, L. Tian, S. Jiang, J. Xu, Feedback control and adaptive control of the energy resource chaotic system, Chaos Soliton. Fract.
21 (2004) 143–150.[7] G. Chen, Chaos on some controllability conditions for chaotic dynamics control, Chaos Soliton. Fract. 8 (1997) 1461–1470.[8] K. Pyragas, Continuous control of chaos by self-controlling feedback, Phys. Lett. A 170 (1992) 421–428.[9] J.H. Park, O.M. Kwon, LMI optimization approach to stabilization of time-delay chaotic systems, Chaos Soliton. Fract. 23 (2005)
445–450.[10] J.H. Park, Stability criterion for synchronization of linearly coupled unified chaotic systems, Chaos Soliton. Fract. 23 (2005) 1319–
1325.[11] Y. Wang, Z.H. Guan, H.O. Wang, Feedback an adaptive control for the synchronization of Chen system via a single variable, Phys.
Lett. A 312 (2003) 34–40.[12] J.H. Park, Controlling chaotic systems via nonlinear feedback control, Chaos Soliton. Fract. 23 (3) (2005) 1049–1054.[13] M. Chen, Z. Han, Controlling and synchronizing chaotic Genesio system via nonlinear feedback control, Chaos Soliton. Fract. 17
(2003) 709–716.[14] R. Genesio, A. Tesi, A harmonic balance methods for the analysis of chaotic dynamics in nonlinear systems, Automatica 28 (1992)
531–548.[15] C. Scherer, P. Gahinet, M. Chilali, Multiobjective output feedback control via LMI optimization, IEEE Trans. Autom. Control 42
(1997) 896–911.[16] P. Gahinet et al., LMI control toolbox user’s guide, The Mathworks, Masachusetts, 1995.[17] S. Boyd et al., Linear matrix inequalities in systems and control theory, SIAM, Philadelphia, 1994.