Embed Size (px)
Citation preview

• I• ..
Local A Posteriori Error Estimation ofHierarchical Models for Plate- and
Shell-Like Structures
-J. Tinsley Oden J. R. Cho
Texas Institute for Computational and Applied MatbelnaticsThe University of Texas at Austin
Austin, TX 78712
~/lay 5, 1995
Abstract
A local a posteriori error estimate for the hierarchical plate- and shell-like struc-tures is derived. This involves the use of of element residuals and flux balancing toproduce upper bounds for the global error. Also it is found that tllis estimate pro-vides accurate local error indicators. Numerical examples are given illustrating thetheorectical results.
1 Introduction
Two types of errors prevail in the numerical analysis of hierarchical models: 1) the er-ror inherent in the hierarchical modeling of plates and shells due to assumptions on dis-placement or stress fields which make it insufficient for these theories to depict significantthree-dimensional features of the behavior and 2) the numerical error in the finite elementapproximation of the solution corresponding to a particular hierarchical model.
The mathematical theory of a posteriori error estimation advanced by Ainsworth andOden[2, 3] has been used to estimate which physical model is acceptable when comparedwith three-dimensional theory. This involves the use of element residuals and flux balanc-ing to produce upper bounds for the global error in appropriate energy norms. Reliablea.nd efficient a poste1'iori error estimator for hpq- adaptive finite element approximations ofhierarchical models is an important tool in developing cOIlvergence criteria and adaptive.strategies.

, l ..i
The implementation of this a posteriori error estimation technique in hierarchicalmodels is composed of four steps: 1) we perform a finite element analysis on an~nitialmodel and mesh; 2) we then calculate flux splitting factors using the solutions obtained illstep l)j 3) we next solve the local equilibrated problem on each element with higher p and qthan those used in step 1) andj 4) we evaluate local error indicators for each element. Thesecalculations produce error indicators that enable one to assess the validity of a specifiedplate or shell model when compared to that furnished by three-dimensional elasticity.
We note that much interest in hierarchical modeling has been evident in recent years.The works of Babuska and'Li [4] and Schwab [10] describe hierarchical models for elasticplates and for thin bodies over which a scalar field is defined. The use of adaptive methodsfor selecting appropriate models in a hierarchy has been explored in preliminary worksby authors [6]. Schwab [10] has proposed a method of a posteriori error estimation forhierarchical models of plate-like structures. We review briefly the results of Schwab in thepresent work and compare' his method and results of ours for model problems involvingplate- and shell-like structures.
2 Notations
Let n be an 'open bounded Lipschitzian domain in 1R3 with piecewise smooth boundaryan. The Sobolev space Hm(n), m E zr, is a Hilbert space defined as the completion of{u E em(n) : lIullm,n < oo} in the Sobolev norm
lIul/m,n = { L 11 nO:u 12 dx }1/2IO:I~m n
(1)
(2)
is the weak or distributional partial derivative. The inner product in the space Hm(n) isdefined as
(u, v)m,n = L 1nO:u . vO:v dx (3)IO:I~m n
Furthermore, H~(n) is defined as the closure of ego(n) in the space Hm(n).
Let P be a partition of n into a collection of N = N(P) subdomains nK withboundaries anK such that
i) N(P) < 00
ii) nJ( is Lipchitzian with piecewise smooth boundary an.
2

,•
./Ifiii) n = U nJ(, nJ(nnL = 0, [( =J L
K=l _
iv) nK n nL is either empty or common edge or a common smooth surface I'KL
Let nJ( be the outward normal vector on nKj then n(s) on fKL is defined by
n(s) = (T/\LnK(s) = (TLKnL(s), s E fKL
{I if J( > L
(TKL = -(TLJ( =-1 if L> J(
That is, n( s) = nJ\( s), s E anJ\ : [{ is the largest index.
3 Hierarchical Plate and Shell Problems
Let W c m? denote an open bounded region with piecewise smooth boundary aw and thethickness d of n, n c 1R3 :
n = {x': (x~,x;,x;) EIR31 (x;,x;) E w, Ix;/ < d/2}
Futher, we introduce the lateral boundary ani and the faces an± of the body,
ani = {x' E~ I (x;,x~) E aw, Ix;1 < d/2}
an± = {x' E1R3/ (x;,x~) E w, x~= ±d/2}
an = ani u an±
(4)
(5)
Here, x' is the local cartesian coordinate system with x~ normal to the reference surfacedenoted by w.
Let fD and fN denote the portions of the boundary an of the body on which thedisplacements and the tractions are prescribed, respectively (the Dirichlet and Newmannboundary conditions). For convenience of notation, let us define aWD and aWN by
{xEfD/X3=O}
{(XI, X2, 0) E w I (Xl, X2, ±d/2) E fN}(6)
Viewing n as a three-dimensional elastic body (as opposed to s thin plate or shell), theelliptic boundary value problem can be written in the form,
u
r(n)O'(u)
3
f in no on I'D9 on fN
(7)

· I I.
I
and the strain-displacement relations and the constitutive equations can be expressed as
€(u)O'(u)
DuEDu (8)
Here, u = (Ul, U2, U3V is the displacement field in n, DT represents the divergence operator,
and 0'( u) is the Cauchy stress, where, if u = (UI, U2, U3V are the cartesian components ofthe displacement vector u, then
a/aXl a aa ajax2 aa a a/aX3
(9)D= I Ia/aX2 O/OXl a
a Ojax3 a/aX2ajfJx3 0 a/OXl
In (8), E is the symmetric positive definite matrix of three-dimensiollallinear elasticities(elastic moduli) satisfying the ellipticity condition
eTEe ~ a eTe, 'iff-E1R6, a>O
withEl E2 E2 a 0 aE2 El E2 a a 0E2 E2 El a a aE= I a a a E3 a a0 a a a E3 aa a a a a E3
(10)
(11)
For the case of isotropic materials, El = 2µ + .\,Ez = .\ and E3 = µ, and µ, A are Lame'sconstants. Also, r(n) is determined by the components ni of the unit exterior normal at apoint x E an, f represents body force, and 9 represents applied traction on the boundaryrN of an j an = rN u rD, rN n r D = 0:
( 12)
Throughout this work, we assume that n is sufficiently smooth (generally Lipschitizian orsmoother) and that the data f and 9 are smooth, e.g., f E (L2(n))3, 9 E (L2(fJn))3,
4

" I •
I
We next define the space \I(n) of admissible displacement fields, Vector-valuedfunctions in V(n) must satisfy homogeneous kinematic boundary conditions on rD andhave a finite strain energy U(v):
U(v) = ~ r £(v?u(v)dv2 in
- ~ r (Dv)TEDvdv < 00, Vv E V2 in
(13)
where dv = dXl dX2dx3. It is well known that the Korn inequality implies that there existtwo positive constants CI, C2 such that
clllvll~,n ~ U(v) ~ c2I1vll~,n' Vv E V
(for meas rD > 0) where, the norm IIvlb.n is defined by
If V (n) is defined byV = {v(x) E (H1(n))3 : v = 0 on fD} (14)
then we are guaranteed that v E \I(n) implies that U(v) < +00, i.e., the displacementfields in V( v) have finite energy. The variational or weak formulation of the boundary valueproblem (7) is
Find u E V(n) sµch that Vv E V(n)
B(u,v)=L(v) (15)
where, the bilinear functional B : V(n) x V(n) ~ 1R and the linear functional L : V(n) ~ 1R
define the internal and external virtual work, respectively:
B(u,v)
L(v)
k(Dv)TEDu dv
f vT fdv + f vT gdsin lrN
(16)
Now define the space vq(n) by
11'(11) = { v~ = ~ U~(x" x2)P~(2x3/d) U~(XI,X2) E ]P(w) }
ut = a OIl aW/J, 0' = 1,2,3(17)
with p~ being a Legendre polynomial of order j, and assume the traction g+ = 9 /2 acts onthe top and g- = 9 /2 acts on the bottom surface of the body. Obviously, vq(n) is a closed
5

· .I
subspace of Yen) and the original variational formulation (15) becomes a dimensionally.reduced approximate form defined on the reference surface w:
(18)
where, the bilinear functional Bq : Vq(n) x Vq(n) ---+ 1R and the linear functional Lq
vq(n) ---+ III are expressed by the following dimensionally reduced form, respectively:
(19)
A Hierarchical A10del is an approximate solution of (15), i.e. a projection of thesolution of three-dimensional elasticity (15) onto the space Vq with respect to the innerproduct B(·, .). We define the (qI,qZ,q3) hierarchical model as the approximate solutionwith the model orders q = (ql, qz, Q3)'
The restriction of the test functions vq E Vq(n) to nK is denoted
where V* is the space of Vq(n) functions restricted to nK. Let v'J<hbe a local finite elementapproximation of vi< involving polynomials of order PK. Since the global approximationvq,h of vq E Vq(n) must be continuous at the interelement boundaries in order to possessfinite energy, the global approximation space Vq,h(n) is a subspace of Vq(n) containingvector-valued test functions, vq,h E (CO(n))3, vq,hl = vt. Clearly each restriction v'J<hof
OKa function in the finite element space Vq,h(n) can have different approximation polynomialorders within each element. Then the finite element approximation of (18) is
(20)
6

· .f I
4 A Posteriori Error Estilnation
4.1 An Upper Bound of the Error
Let u and uq be the exact and the dimensionally reduced approximate solutions of (15) and(18), respectively. Then, the hierarchical modeling error eq is defined as
(21 )
Let uq,h be the solution oCthe finite element approximation (20) for the q = (qI, q2, q3)hierarchical model; then the finite element approximation error eq,h of the q hierarchicalmodel is defined as
(22)
Combining these two errors we can define the finite element approximate error e measuredwith respect to the original t.hree dimensional elliptic problem (15):
e E V(n), e = eq + eq,h = u - uq,h
The energy norm 11·110 is defined using the bilinear form B(·,·) in equation (15)
(23)
(24)
where the space V(n) is defined in (14). Let the linear functiollals IT : V(n) -. lR, ITq :Vq(n) -.lR and J : V(n) ~ 1Rbe defined respectively, as
IT(v) 1'213(v,v) - L(v)1'2Bq(Vq,Vq) - Lq(vq)
_ n(v) - IIq(uq,h)
Next consider the difference between the potential functions II(u) and ITq(Uq,h):
J(u)1 12'B(u,u) - L(u) - 2'Bq(Uq,h,uq,h) + Lq(uq,h)
1-2'B(u - uq,h,u - uq,h) - L(u) + L(uh)
+ B(u, u) - B(u, uk)
(25)
where we use the fact that Bq( uq,h, uq·h) and Lq( uq,h) are restrictions of B( uq,h, uq,h) andL( uq,h) from the space V into Vq, respecti vely. It is not difficult to verify that we have
7

"
We define the local solution space lIJ( and V(P) in a subdomain nI< as
V(P)
{v E [H1(nI<W: v = 0 on anK n fD}N(P)
II VKK=l
(27)
so that V C V(P). The elements v E V(P) are discontinuous across the interelementboundary fI<L. Also, we define the local solution space Vi and vq(P) in a subdomain OKas
Vk( n) : { v::t.U~(XI, X2)P~ (2X3/ d)
N(P)
vq(P) = II v:q[(K=l
so that vq C vq(P). We define the jump of v as
ui = a on aWl( n awn,o " : 1,2, 3 }
(28)
{
V l( - ,v L if [( > L[v] =
v L - v K if L > ]((29)
In the local space VK, the bilinear and the linear forms restricted to a finite element nK aredefined by
BK : VK X VK -) fR
L[( : VI< -) fR
ITK : VK-)fR
Also, in the local space Vk', the bilinear and the linear forms restricted to a finite elementnk are defined by
Bq,K : Vl x Vl --.fR
Lq,K : Vl -) fR
ITq,K : Vl -) IR
We introduce the averaging function Cl:Kd s) on the interelement boundary rI<L a.c;
(30)
8

with this a[(L, we can define the averaged kth-component of traction acting on the elementJ( along rK L defined as
(r(n)u(uq,h)):_O = aiK [r(nK)O"(u1()r + akL [r(nK)u(uth)t
Then, it can be easily verified that for v E vq(P),
Af(1')fl koK\an vT (r(n)u(uq,h))I_o ds = EtKL [[vTll (r(n)u(uq,h)\_o ds (3l)
where, 01-0 denotes the averaged flux on the interelement boundaries. We extend IT and llqto the space V(P) and vq(P) respectively and consider the difference of functionals J1' :V(P) ~1R,
J1'(v) Il(v) - I1q(uq,h), V E V(P)
Af(1') { }- L ITg(v) - IIq.l\(uq,,,) - { vT (r(n)u(uq,h)) dsK=1 JaOK\an 1-0
(32)
(33)
We insure that the interelement jumps [v] are constrained to be zero by using a Lagrangemultiplier µ. This leads to the introduction of a Lagrange functional £. defined by,
(, : V(P) x M -dR
£.(v, µ) = J1'(v) - µ([v])
, where, the M denotes the space of Lagrange multipliers. From (33) and (34),
(34)
£.(v,µ)(35)
The functional £. is composed of a sum of local contributions from each element nK and anextra coupled term through [v]. By choosing µ= µ, where
(36)
£. becomes a sum of purely uncoupled local contributions. We notice that for any v E V(n),
{,( v, Jt) = J (v)
9
(37)

and from (26),1 2
- -2 IIellE = J(u) = inf £(v, µ)VEV(O)
Let us define the functional 4> : V(P) -t ill as;
4>(v) = sup £(v,µ)µEM
then,
. <I>(v) = {J1'(V) , v E V(n)+00 , otherwise
Therefore,inf <1>( v) = inf <1>( v) = inf J1'( v)
VEV(1') VEV(O) VEV(1')
and, using (26),
(38)
-~"ell~= inf J(v)2 VEV(O)inf sup £(v,µ)
VEV(1') ItEM
> sup inf £(v,µ)µEM VEV(1')
> inf £(v, µ), Vµ EMVEV(1')
(39)
With the choice of a Lagrange multiplier µ in (36), an upper bound of the error isgiven as follows :
(40)
Hence, in order to obtain an upper bound of the approximation error, we need only thefollowing local element-wise problemsj
It can be easily proved that (41) is equivalent to the following element-wise variationalstatement:
Find UK E VK such that Vv E VK
BI«UK,V) = LI«V) + ( vT(r(n)u(uq,h)) dsJaOK\8n I-a
10
(42)

Obviously, equilibrated local problems are defined on the three dimensional broken spaceV(nK). With this UK,
-2 inf {I1K(V)-rrqK(uq,h)- ( vT(r(n)u(uq,h)) dS}VEV(P) 'JaOK\aO 1-0' (43)
= BK(UK, UK) + 211q,K(Uq,h)
Denoting171< = BK(UK, UK) + 2I1q,K(Uq,h) (44)
N(P}
lIell~ :S L Til (45)K=1
The quantities 1]K are thus error indicators and provide a measure of the error boundcontributed to the global error by the error in element OJ{. In [2, 3], a necessary andsufficient condition for the existence of a solution for the Neumann-type problems (42) isdiscussed.
Next, consider the discretization of the local element-wise problem (42) by introduc-ing the local approximation solution space ~~ such that
(46)
Using the restrictions of BK and LK into V/~, the discrete local element-wise problem cor-responding to (42) is as follows:
Find u~ such that Vvh E VR(47)
(48)
4.2 Compatibility Condition and Self-Equilibrating Fluxes
Let denote W = UK-Uq,hj then w E VK, and rewrite (42) Find w E VK such that 'Iv E VK
BK(W,V) = LK(V) - BJ«(uq,h,v)
+ ( vT(r(n)u(uq,h)) dsJaoK\ao 1-0'
For the Neumann-type elements which do not share any face with rD, we must impose anecessary and sufficient condition for the existence of a solution of (48). The compatibilitycondition for those elements is:
(49)
11

for all f} E n(rlJ(), where n(rlJ() is the space of rigid body motions:
{v E [H1(nJ()]3: £(v) = 0 in L2(rll<)}{v E [H1(nJ()]3: vex) = Ct+C2 X x E nK, CI,C2 E1R3}
This compatibility condition determines the averaging flux factors O:~L'
We next introduce the flux splitting and equilibration method of Ainsworth andOden [3]. The flux splitting on interelement boundaries is a three-dimensional problem. Weintroduce a cubic element with eight vertices. Let :F(P) denote the set of all vertices in thepartition, and consider any vertex A in this partition. Associated with each such vertexnode A is a piecewise trilinear shape function 1/JA, which vanishes at every other vertex nodein this partition and has a value of unity at the node A. With this shape function 1/J(x), theaveraging function O:~L of (30) can be expressed on the face fl<L which has the end nodesA,D,e and D:
o:j<L(S) = o:j(L,A1/JA(S) + O:~L,13'I/JB(S)
+ o:j(L,c1/Jc(s) + O:~L,D,pD(S) k = 1,2,3, S E fKL
Now, return to the weak formulation to any single element ]( E P
(50)
(51)
(52)
where <p( x) is a sufficiently smooth vector-valued test function on element ]{, If <p =1, {I = (1,1, If}, ,
BK(u,l)=LK(l)+ ( ITT(n)u(u)dsJaflK\80
Equation (52) characterizes the equilibration of an element K, and the solution of (52) isthe true solution to the problem. Equation (52) also defines a necessary condition on theload data in order that (51) be solvable. To guarantee that this compatibility conditionholds with uq,h instead of u, we have to find the flux splitting factors o:~lusing the finiteelement solution uq,h while (52) is still being satisfied. The equilibration condition for theapproximation uq,h in the kth-direction on element nK is
3 .E Bj;(u;'\ 1) = L~(I) +;=1
(53)
Here we can see that Equations (49) and (53) are equivalent because Equation (49) describesthe compatibility condition on the load data for the exist.ence of a solution and Equation(53) solves O:~L in order for the element to be in force equilibrium.
12

Now we consider the lack of force equilibrium in the kth-direction on element nl{:
+(54)
Since the trilinear shape function tP(x) has the following property:
L tPA(x)=1 'v'xEnAeF(P)
the replacement of unit in (54) yields
Ak "Akul{ = L.J Ug,A
A
where
(55)
(56)
3
~j(,A = L1«tPA) - LBlt(uj'h, tPA)j=1 (57)
+ f 1/JA(S)(r(n)a(uq,h)/ dsJanJ(\an I-or
Equation (56) indicates that the lack of force equilibrium in the kth-direction on elementnK is split into ~j(,A with respect to each ~lOdeA of the element nK.
For convenience, we introduce an anti-symmetric operator µKL : r](L -+ if
k k /2I.lKL ~ O'.KL- 1 , k k /2µLl< = O'.L[(- 1 , k = 1,2,3 (58)
From the definition of O'.kL in Equation (30)
O'.kL+O'.1K = 1
k k 1µKL + µLK +
we havek _ k
µKL - -µLK'
Then using these quantities, we have
k = 1,2,3 (59)
( )k h hr(n)a(uq,h) l-or = O'.1K[r(nK)0"(u1< )]k+O'.kdr(nK)a(ut )]k
1 { h h }k2 r(nK)o-(u1< )+r(nK)o-(ut)
+µlKr(nl{) {a(u1<h) _o-(uth)}k
(r(n)a(uq,J;))~/2 + µiI< [[r(n)o-(uq,h)]r
13
(60)

• •
where [[r(n)u(uq,h)]r is the jump in the kill-component of traction on the interelementboundary face rK L·
For convenience, we introduce the following quantities:
kPLK,A
(61)
From (60) and (61), Equation (57) becomes
AkUK,A bk "k k
K,A - LJ µLK,APLK,AL>o
bk " 'kK,A - LJ µLKL>o
(62)
h ~k k k 'fl· ' k ' k b k' . . d k 'were µLK = µLK,APLK,k len µLK = -µKL ecause µLK IS antl-symmetnc an PU;,A IS
symmetric. We use M,l( for L> ](; then the vanishing of ~J('A is equivalent to
(63)
Now consider a patch of elements sharing the node A.
We can construct a system of equations such as (63) for elements in the patch of the nodeA. Consequently, we can split fluxes on interelement boundaries with respect to each nodeby solving the following linear equation:
k = 1,2,3 VA E :F(P) (64)
whereNAel = the number of elements sharing the node A
NAed = the number of intere1ement faces sharing the node A
( )1'
bk - bk bk ... bkA - I<],A, K2,A, , I<NAel,A
(~ k )1'
- µLK"" , whereL>I<
M A is the NAei x NAcd underlying matrix for a patch of the node A, which is characterizedby the patch of a given node. After solving the linear equation (64), we can find the fluxsplitting factors aj{L using the definition of µ~L and relation (58), The resultant equilibrated
14

, "
stresses calculated with aj{L satisfy the force equilibrium compatibility condition. Next, wesolve the discrete element-wise problems (47) using this calculated flux splitting factor a~ L
on the local approximation solution space V[~. Then, from the previous argumen.t, wecan get better approximation solutions it~<which can be used for error estimations on theequilibrated elements.
4.3 A Posteriori Modeling Error Estimation
In this section, we summarize an a posteriori modeling error estimator derived by Schwab[10] for the hierarchical models. Basically this estimator uses the decomposition of themodeling error into two parts: a membrane part ej and a bending part eh.
Using the orthogonality of these two parts in energy, an estimation can be doneindependently, e.g.
e; = Ui - u;, 8(ej,ejJ) = 0, i = I,ll
Ileqll~ = lIejll~ + lIejIII~(65)
(66)
Here, U/ and UII represent a membrane part and a bending part of the displacement fieldof the three-dimensional solution while uj and uh denote corresponding parts of the q-hierarchical model which are obtained independently by the problemsj
Find u7 E H?(n) such that
(67)
Where H?(n) = vq(n) n Vi(n) and VI and VII define sets of admissible displacement fieldsfor each part which are orthogonal subsets of V(n), e.g. V = VIffi VII, and L~('V) is a loadfunctional for each part of the loading.
This modeling error estimator measures the residual traction defined by
(68)
where, gl(xt, X2) is a traction calculated from uq on the top and bottom surfaces.
Theorem 4.1 Let the tmction 9 E [L2(an)]3 and the body force f E [L2(n)]3, and the bodyforce f be polynomials in the thickness coordinate of degree m ::; q for a. e. (Xl' X2) E w.And let the midsu1jace w C JR2 be open, bounded and smooth enough such that the Greenidentities hold. Then the following modeling error bounds hold for linearly elastic isotropic
15

t "
materials:(i) Membrane part:
(69)
(ii) Bending pa1't:
(70)
where,
a(q) = 2 [f] 1Proof: See [10] 2 +2' b(q)=2[q;I]+~ •This modeling error estimator is derived by assuming that the hiera.rchical model uq is solvedexactly. For the Reissner-Mindlin model (e.g. the q = 1 model with the modified materialconstants), this estimate does not provide accurate modeling errors. Refer to reference [10]for a detailed derivation.
5 Nulnerical Exalnples
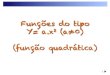
Figure 1 shows a clamped square plate-like body with uniform thickness. A uniformlydistributed load gz is applied on the top surface, and from the symmetry, only a quarter ofthe structure is considered. In order to evaluate the quality of the proposed error estimator,the effectivity index () defined below is evaluated. Since we do not have exact analyticalsolution for both problems, we use the approximated solution URef. of the higher model onthe same mesh using the higher order approximation (Here, q = 6 and p = 6 are used.):
()K =
"1/ llu - uq,hIIE(o)
"IK/ Ilu - uq,hIIE(OK)
(71)
Table 1 contains results obtained using 9 uniform elements and provides a compari-son with the conventional error estimator without equilbribration (i.e., CKKL = 1/2). Resultssuggest that the calculated element-wise effectivity indices with equilibration are consider-ably improved and more uniformly distributed. Table 2 contains results for the cylindrical
16

f ..
roof shown in Figure 2 with the diaphragm boundaries in which Ur, U(J are fixed but uy isfree. The relative thickness Rlt is 20 and a uniform body force is assumed. The same 9uniform elements are used for a quarter of the structure as in the case of the plate. It isshown that there is considerable improvement in the quality of the estimator.
From (47), the solution u~ of the localized problem depends on the interelementtraction (r( n )O"( uq,h)) ,Unfortunately, this traction suffers numerical locking as the
1-0thickness becomes smaller for low order approximation schemes. When the numerical lock-ing is serious, calculated localized solution u~ could not approach the exact solution. Con-sequently, estimated effectivity indices deteriorate, as shown in Figure 3. In this examplethe shell is not bending-dominated [9], which implies numerical locking does not exist. Re-sults are given in Figure 4, This defect could be removed when higher-order approximationsare used.
We can see improvement in the effectivity indices for the plate problem when quadraticelements are used. Also, it is shown that for both problems, the higher that order is used,the better the effectivity indices arc obtained.
The next two tables, Tables 3,4, represent the estimated ralative error ~ with respectto the model level q for the thick (aid = 5) and the thin case (aid = 20). Here, estimationis obtained using p = 7 on the 16 uniform elements. The relative error ~ is defined by
(72)
Estimated relative error decreases as q increases, especially from q = 1* to q = 2. Theslopes in the relative error for the thin case are slower than the thick case. This impliesthat relatively low hierarchical models can be used for the thin structures compared to thethick ones to meet the same predefined relative modeling error. Figures 5,6 represent slopesof the global relative error .for both cases.
Local distribution of the relative modeling errors for the thin case are shown Figures7,8,9 and 10 for the plate problem, while Figures 11, 12,13 and 11 for the shell problem.
Finally, Tables 5, 6 provide a comparison between the estimated relative modelingerrors by flux balancing and the residual traction methods, respectively. At low model levelstwo results are quite close, but as the model level increases, differences appear between tworesults, The same situation is reported in Tables 7, 8 for the shell problem. This is becausefor the estimator using residual traction the effectivity indices become worse as a modellevel increases [10]
17

c "
6 Conclusions
We derived a posteriori error estimator using elcment-wise self cquilibrating fluxes. Fromnumerical results, considerably accurate and uniform effectivity indices over the entire do-main are obtained compared to t.he conventional method without equilibration.
Numerical locking decreases the accuracy of quality of the error estimator which isbased on the element residuals, due to the deterioration of the interelement tractions. But,as the approximation order or the mesh density increases the quality can be in generallyrecovered.
Modeling errors are closely related to the model order q and the thickness of thestructure. It is found that the modeling error decreases monotonically as the model order qincreases. As the thickness decreases, slopes of the modeling error with respect to a modelorder decrease except from q = 1· to q = 2, which reflects that the q = h is not a modelfor any thickness but a limit model (aid ---700).
This estimator provides a reliable element-wise error indicator; thus it can be a goodtool for an optimal hpq-adaptive scheme.
Acknowledgements: The support of this work by the Office of Naval Research underGrants No. N00014-92-5-1161 is gratefully acknowledged.
References
[1] Adams, R. A., Sobolev Spaces, Academic Press, 1975.
[2] Ainsworth, M., Oden, J. T., A Unified Approach to A Posteriori Error Estimationusing Element Residual Methods, Numer. Math., 65, pp. 23-50, 1993.
[3] Ainsworth, M., Oden, J. T. and Wu, W., A Posteriori Error Estimation for hp-Approximation in Elastostatics, Appl. Numer, Math., 12, pp. 23-55, 1994.
[4] Babuska, I., Li, L., The Problem of Plate Modeling: Theoretical and ComputationalResults, Compo Meth. Appl, Meth. Eng., 100, pp. 249-273, 1992.
[5] Babuska, I. and Schwab, C., A Posteriori Error Estimation for Hierarchic Models ofElliptic Boundary Value Problem on Thin Domains, Technical Note BN-1148, Institutefor Physical Science and Technology, University of Maryland, College Park: 1993.
[6] Cho, J. R., A Study of Hicrarchical Models of Structures using Adaptive hp-FiniteElement Methods, Masters Thesis, The University of Texas at Austin, 1.993.
18

.. ..
[7] Demkowicz, L., Oden, J. T., Rachowicz, Vol. and Hardy, D., Towards a Universal h-p Adaptive Finite Element Strategy, Part 1. Constrained Approximation and DataStructure, Compo Meth. Appl. A1cth, Eng., 77, pp. 79-112, 1989,
[8] Oden, J. T., Demkowicz, L., Rachowicz, W. and Westermann, T. A., Towards a Uni-versal h-p Adaptive Finite Element Strategy, Part 2. A Posteriori Error Estimation,Compo Meth. Appl. Meth. Eng., 77, pp. 113-180, 1989.
[9] Pitkaranta, J., The Problem of Membrane Locking in Finite Element Analysis of Cylin-drical Shells, Numer, Math., 61, pp. 523-542, 1992.
[10] Schwab, C" A-Posteriori Modelling Error Estimation for Hierarchic Plate Models, Re-port SCH 91-01, University of Maryland, Baltimore County, 1994.
[11] Szabo, B. A. and Sahrmanll, G. J., Hierarchic Plate and Shell Models Based On p-
Extensions, Int. J. Num, Meth, Eng" 26, pp, 1855-1881, 1988.
19

Table 1: Estimated error and effectivity index for the clamped plate (aid = 20, p = 2, q =1*).
Elem Error( x 10-7) Effectivity IndexNo true with equil. w/o equil. with equil. w/o equil.
1 0.85295 0.87137 0.88995 1.02160 1.043382 0.54125 0.66503 0.85881 1.22869 1.586713 0.91571 0.94120 1,05390 1.02784 1.150924 0.54125 0.66503 0.85881 1.22869 1.586715 0.35526 0.54827 0.74903 1.54330 2.108406 0.62436 0.62775 0.76473 1.00544 1,224827 0.91571 0.94120 0,10539 1.02784 1.150928 0.62436 0,62775 0.76473 1.00544 1,224839 0.35332 0.32251 0.40320 0.91275 1.14115
~ total I 2.00528 I 2.14670 I 2.52622 I 1.07052 I 1.25978 I]
Table 2: Estimated error and effectivity index for the cylindrical roof (Rlt = 20,p = 2,q =1*).
Elem Error( X 10-3) Effectivity IndexNo true with equil. w/o equil. with equil. w/o equil.
1 0.31130 0.40218 0.46577 1.29194 1.496202 0.29875 0.44773 0.52736 1.49868 1.765243 0.43843 0.48191 0.48125 1.09918 1.097664 0.66219 0.75577 1.09963 1.14132 1.660605 0.43824 0.62268 1.06949 1.42087 2.440436 0.76109 0.67197 0,69844 0.88290 0.917687 0.86622 0.91516 1.35491 1.05650 1.564188 0.53016 0.53942 1.19404 1.01746 2.252209 0.95871 0.76321 0,80701 0.79608 0.84176
~ total 11.88115 I 1.92767 I 2.73500 I 1.02473 I 1.45390 II
20

.. ..
Table 3: Estimated relative modeling error with respect to the thickness for the clampedplate (p = 7).
~ Elem I q = 1* model I q=2 model I q=3 model I q=4 model ~1 0.09701 0.01644 0.00813 0.000092 0.08559 0,03686 0,00837 0.000183 0.09329 0.06819 0.00828 0.002354 0.15362 0.10648 0.04518 0.02921
5 6 0.07672 0.03939 0.00855 0.000167 0.08402 0.05658 0.00846 0.002078 0.13582 0.09020 0.03927 0.02540
11 0.07944 0.04267 0.00847 0.0019712 0.10573 0.05932 0.02785 0.0182816 0.07939 0.03356 0.02162 0.01673
1 0.14244 0.00578 0.00072 0.000172 0.10878 0.01224 0.00079 0.000423 0.04712 0.02424 0.00361 0.004594 0.13206 0.04538 0.01895 0.01489
20 6 0.08402 0.01250 0.00077 0.000387 0.03719 0.01940 0.00298 0.003858 0.10689 0.03768 0.01560 0.01226
11 0.01973 0.01279 0.00241 0.0029312 0.06413 0.02224 0.00922 0.0072616 0.03073 0.00888 0.00626 0.00593
21

. "
Table 4: Estimated relative modeling error with respect to the thickness for the cylindricalroof (p = 7).
[!ZI] Elem I q = 1* model I q=2 model I q=3 model I q=4 model ~1 0.02624 0.00472 0.00385 0.003842 . 0.01831 0.00455 0.00348 0.003453 0,00905 0.00420 0.00303 0.003004 0.03355 0.00669 0.00584 0.005825 0.05793 0.00940 0.00833 0,008326 0.03811 0.00747 0.00630 0.006297 0.01830 0.00542 0.00438 0.00436
5 8 0.07724 0.01397 0.01258 0.012569 0.07908 0.01318 0.01170 0,01169
lO 0.05040 0,00940 0.00790 0.0078911 0.02549 0.00550 0.00426 0.0042412 0.10715 0.01923 0.01732 0.0173013 0.08904 0.00898 0.00755 0.0075214 0.05602 0.00687 0.00506 0.0050315 0.02927 0.00450 0.00291 0.0028816 0.12076 0.01268 0.01101 0.010981 0.02495 0.00129 0.00055 0.000552 0.02046 0.00119 0.00077 0.000773 0.00920 0.00112 0.00088 0.000884 0.03555 0.00509 0.00210 0.002105 0.05606 0.00172 0.00103 0.001036 0.04377 0.00196 0.00121 0.001207 0.01763 0.00170 0.00108 0.00107
20 8 0.08048 0.00446 0.00261 0.002619 0.07921 0.00221 0.00143 0.00143
10 0.05969 0.00258 0.00139 0.0013911 0.02298 0.00191 0.00079 0.0007812 0.11060 0.00406 0.00309 0.0030913 0.09152 0.00202 0.00098 0.0009814 0.06773 0.00255 0.00084 0,0008415 0.02566 0.00198 0.00041 0.0004116 0.12532 0.00209 0.00179 0.00179
22

. ..
Table 5: Estimated relative modeling error by the flux balancing for the clamped plate(aid = 20,p = 7).
Elem Flux balancingNo q = 1 model q=2 model q=3 model q=4 model
1 0.14244 0.00578 0.00072 0.000172 0.10878 0.01224 0.00079 0.00042.3 0.04712 0.02424 0.00361 0.004594 0.13206 0,04538 0.01895 0.014896 0.08402 0.01250 0.00077 0.000387 0.03719 0.01940 0.00298 0.003858 0.10689 0,03768 0.01560 0,01226
11 0.01973 0.01279 0.00241 0.00293l2 0.06413 0,02224 0.00922 0.00726]6 0.03073 0.00888 0.00626 0.00593
II Total I 0.35428 I 0.10299 I 0.03829 I 0.03108 ~
Table 6: Estimated relati.ve modeling error by the residual traction for the clamped plate(aid = 20,p = 7).
Elem Residual tractionNo q = 1 model q=2 model q=3 model q=4 model
1 0.15156 0.00888 0.00284 0.002672 0.11536 0.01759 0.00284 0.002673 0.04727 '0.03255 0.00287 0.002974 0.14354 0.08592 0.05340 0.045896 0.08879 0.01794 0.00284 0.002677 0.03707 0.02592 0.00284 0.002888 0.11616 0.07092 0.04375 0.03760
11 0.01889 0.01707 0.00286 0.0028212 0.06978 0.04194 0,02595 0.0223416 0.03355 0.01539 0.01038 0.00909
~ Total I 0.3796] I 0.]8262 I 0.10516 I 0.090,50 II
23

~ ,.
Table 7: Estimated relative modeling error by the flux balancing for the cylindrical roof(R/t = 20, p = 7),
Elem Flux balancingNo q = 1 model q=2 model q=3 model q=4 model
1 0.01742 0.00129 0,00055 0.000552 0.01185 0.00119 0,00077 0.000773 0.00365 0.00112 0.00088 0.000884 0.00743 0.00509 0.00210 0.002105 0.04661 0.00172 0.00103 0.001036 0.03144 0.00196 0.00121 0.001207 0.00871 0.00170 0.00108 0,001078 0.01038 0.00446 0.00261 0.002619 0.06822 0.00221 0.00143 0.00143
10 . 0.04497 0.00258 0.00139 0.0013911 0.01213 0.00191 0.00079 0.0007812 0.01160 0.00406 0.00309 0.0030913 0.07794 0.00202 0.00098 0.0009814 0.05109 0.00255 0.00084 0.0008415 ' 0.01375 0.00198 0.00041 0.0004116 0.01189 0.00209 0.00179 0.00179
~ Total [ 0.14082 I 0.01051 I 0.00599 I 0.00597 ~
21

.. I' "
Table 8: Estimated relative modeling error by the residual traction for cylindrical roof(Rlt = 20,p = 7).
Elcm Residual tractionNo q = 1 model q=2 model q=3 model q=4 model
1 0.02341 0.00l60 0.00004 0.000012 0.01540 0,00121 0.00004 0.000013 0.00467 0.00091 0,00004 0.000034 0.01016 0.00702 0.00042 0.000425 0.06234 0.00179 0.00003 0.000016 0.04049 0.00205 0.00003 0.000017 0.01134 0.00183 0.00004 0.000038 0.01377 0.00531 0.00032 0.000329 0.09121 0.00215 0.00004 0.00001
10 0.05790 0.00288 0.00004 0.0000211 0.01585 0,00243 0.00004 0.0000212 0.01528 0.00332 0.00020 0.0002013 0.10636 0.00239 0.00005 0.0000114 0.06682 0.00334 0.00004 0.0000215 . 0.01815 0.00273 0.00004 0.0000216 0.01576 0.00145 0.00009 0.00008
~ Total I 0.18780 I 0.01222 I 0,00059 I 0.00057 ~
25

. "
ITJJJTITIgz
a
Ia
~y
--;. x
a = 1.0 in
d = Thickness
E = Young's Modulus
107psi
Poisson's Ratio = 0.3
g = 4.0 x d3lbf/in2
z
Figure 1: Clamped square plate with a uniform distributed load.
L = 5.0 in
R = 1.0 in
t = Thickness
Body force (r 0) = 4.0 lbf/itf
E = 10 7 psi
Poisson's Ratio = 0.3
Diaphragm (u r= U 8= 0)
Figure 2: Cylindrical roof with diaphragm boundaries.
26

; .,
ald= 5, p=l --ald= 5, p=2 -+---ald= 5. p=3 '-0' ..,
ald=20, p= 1 ---ald=20, p=2 - '-ald=20, p=3 - '--
)I.' .A.......' """
"'.~.;•...•••~'::;;;.. ;;.:"....;';~"'~:,.
3
2.5
2KCl)"050
1.5 f--: ,.J<. •. ,:~u~....UJ
O 5 1-... ---'.--- .--"-.. ----)(.----- _--.- .. K,.- .)(, •.__ ._~_-)(---'---"-)('" -
oI 2 3 4 5 6
Element No.7 8 9
Figure 3: Variation in effectivity indices of the plate problem.
3
2.5
2><Cl)
"0.5>.
1.5-';>'::1
~UJ
0.5
Rlt= 5, p=1 -+-Rlt= 5, p=2 -t--
Rlt= 5, p=3 .0£) ....
Rlt=20, p= 1 -*-Rlt=20, p=2 --0.-
Rlt=20, p=3 -...'- ..
° 1 2 3 4 5 6Element No,
7 8 9
Figure 4: Variation in effectivity indices of the shell problem.
27

,. . ..
0.5
0.45
0.4
0.35 •.g0,3t)
t)~'a0.25 rC<lu...
C;;0.2.D
0(3
0.15 ~ .."'--0.1 ~ ~--------
0.05
ald= 5 --ald=20 -+---
-- ..... ~------ - --~- - -- --------------
o1 2
Model order q3 4
Figure 5: Dependence of the modeling error on the thickness for the plate.
Rlt= 5 --Rlt=20 -+---
0.3
0.25
... 0.2gt)
t)~'aC<l 0.15]";l.D0(3 0.1
0.05
01
\,\\~\
4-- ....~ ..
2, Model order q
3 4
Figure 6: Dependence of the modeling error on the thickness for the shell.
28

I Proj';"~;;I-I
o ,374E-OI ,748E-OI 112E.oo
TOT= .354E-tOOMIN= ,l97E-OiMAX=,142E-tOODOF= 2125
Figure 7: Distribution of local relative modeling errors of the plate problem (aid = 20,p =7,q = 1*).
F------~ecl: ,p.!Q,L _ Relalive~r(l;'Ju!:L-, _, __
,II
Ir-o .1l9E-01 ,2J8rAlI .3S7E-01
TOT=.103E+OOMIN= .578E-mMAX=.454E-Ol IDOF= 3825
I Z IA76"~ ~y-,
Figure 8: Distribution of local relative modeling errors of the plate problem (aid = 20, p =7,q=2).
29

, .. ",.
Project: plO~ ~13tiye Error(l~i~_
TOT-= 383E-OIMIN-= ,718E-03MAX-=,190E-OIDOF-= 5100
I
,199E-01 I,149E~1,99SE-Q2
II
rl~rT.~.·I!~'''0o;rJ~'-;I:;;*~.:,,~ ..~';"/l.~
o 497E-<l1
- ---
Figure 9: Distribution of local relative modeling errors of the plate problem (aid = 20, p =7,q=3).
TOT= ,311E-OiMIN= ,l74E-03MAX=,149E-OlDOF-= 6375
-
1_
o .3'JIE-02 ,782E-02 ,1I7E-{)\
Figure 10: Distribution of local relative modeling errors of the plate problem (aid = 20,p =7, q = 4).
30

----I
r ' •
TOT= '257E+oo1MIN= ,920E-02 IMAX=,I25E+OO:DOF= 2125
o .329E-0I ,6S8E,Ol ,987£-01 ,132£..ou
Figure 11: Distribution of local relative error of the shell problem (Rjt = 20,p = 7, q = 1-).
~",~'---__=__"""".;..."".il . -
TOT= .105E-01MIN= ,ll2E-02MAX=.509E-02DOF= 3825
Figure 12: Distribution of local relative error of the shell problem (Rjt = 20,p = 7, q = 2).
31

, t ~
L_~_ ,812E·llJ . 162E-m .24410-02
TOT = .599E-02MIN= .4IOE-03MAX=,309E-02_I DOF= ,5100
,325E-02 L .-~,y-- .. -"---
Figure 13: Distribution of local relative error of the shell problem (R/t = 20, p = 7, q = 3).
TOT= .597E-mMIN= .406E-03MAX=.309E-02DOF= 6375-I
.325E-m •.243E-02,I62E-02,812E-03o
Figure 14: Distribution of local relative error of the shell problem (R/t = 20,p = 7, q = 4).
32







![P] ;f]g]jfnf] hfuf] zD;f] Hh'xf oxL x} · (1) O:nfd ;] g efuf] /fx] x'bf oxL x} . P] ;f]g]jfnf] hfuf] zD;f] Hh'xf oxL x} . -cyf{t O:nfdaf6 g efu oxL g} ;Gdfu{ xf] . x] lgb««fdUg](https://img.pdfslide.net/doc/110x75/61411b7783382e045471dfb6/p-fgjfnf-hfuf-zdf-hhxf-oxl-x-1-onfd-g-efuf-fx-xbf-oxl-x-p.jpg)









![XL] 0DXULFLR GD 6LOYD 0(5&$'2 '( 23d®(6 &RQFHLWRV ......2020/07/06 · 6LWHV KWWSV KDOLS FRP EU RX KWWSV OXL]PDXULFLR ZL[VLWH FRP KDOLS H PDLOV PDXULFLR#KDOLS FRP EU RX OXL]PDXULFLR](https://img.pdfslide.net/doc/110x75/60e8dfc86f41a35e6f29df49/xl-0dxulflr-gd-6loyd-052-23d6-rqfhlwrv-20200706-.jpg)