Embed Size (px)
Citation preview

LocallyOptimalReachSetOver-approximationfor
NonlinearSystems
EMSOFT 2016
ChuchuFan Sayan Mitra JimKapinski XiaoqingJin

EMSOFT2016⋅ Locallyoptimalreachability⋅ Chuchu Fan⋅ UIUC
Howtochecksafetyofanautonomousmaneuver?
2
𝜔 𝑠$
reachthreshold
switchtoleft
overtake
switchtoright
gainthreshold
abort
Givencontrollerandseparationrequirement,checksafetywithrespecttorangesofinitialrelativepositions,speeds,roadconditions.

EMSOFT2016⋅ Locallyoptimalreachability⋅ Chuchu Fan⋅ UIUC
certificate
model,simulator,
requirements
bugtraceVerificationAlgorithms
Verificationchallenge
Bugdiscovery→ fasterdevelopment
Certificate→ evidenceforDO178C,ISO26262,etc.
Challenge:modelsofcomplexcontrolsystemsoftendonothave
analyticalsolutions→ Simulation⇒ proofs?3

EMSOFT2016⋅ Locallyoptimalreachability⋅ Chuchu Fan⋅ UIUC
SafetyverificationproblemConsidernonlinearODE�� = 𝑓 𝑥 ,𝑥 ∈ ℝ-
‒ Trajectory𝜉 𝑥/, 𝑡 : stateattime𝑡 frominitialstate𝑥/
‒ Reachtube 𝜉(𝐵(𝑥/, 𝛿), 𝑇):allstatesreachablefrominitialset𝐵(𝑥/, 𝛿) ⊆ ℝ- uptotime𝑇
Safetyverificationproblem:giveninitialset𝐵(𝑥/, 𝛿), unsafesetU,timebound𝑇, decide𝜉 𝐵(𝑥/, 𝛿), 𝑇 ∩ U = ∅?
4
Unsafe
𝜉 𝑑/, 𝑡
time
Relativedistance
𝑑/𝐵(𝑑/, 𝛿) 𝜉(𝐵(𝑥/, 𝛿), 𝑇)

EMSOFT2016⋅ Locallyoptimalreachability⋅ Chuchu Fan⋅ UIUC
5
Simulation-drivenverificationstrategyGivenstartandunsafeComputefinitecoverofinitialsetSimulatefromthecenter𝑥/ ofeachcoverGeneralize simulationtoreachtube sothatreachtube containsalltrajectoriesfromthecoverCheckintersection/containmentwith𝑈RefineUnion=over-approximationofreachset
Θ 𝑈
Keystep:𝜉 𝑥/, 𝑡 ->𝜉 𝐵 𝑥/, 𝛿 , 𝑇
𝜉 𝑑/, 𝑡
time
Relativedistance
𝑑/𝐵(𝑑/, 𝛿) 𝜉(𝐵(𝑥/, 𝛿), 𝑇)
Greytube:UnknownGreentube:Safe

FeedbackFridayPresentationEMSOFT2016⋅ Locallyoptimalreachability⋅ Chuchu Fan⋅ UIUC
6
Main problem: How to quantifygeneralization?
Discrepancy formalizes generalization:
Discrepancy is a continuousfunction𝛽 thatboundsthedistancebetweenneighboringtrajectories
𝜉 𝑥B, 𝑡 − 𝜉(𝑥D, 𝑡) ≤ 𝛽 𝑥B − 𝑥D , 𝑡 ,
From a single simulation of 𝜉(𝑥B, 𝑡)anddiscrepancy 𝛽 we can over-approximatethereachtube
𝑥B
𝑥D𝜉 𝑥D, 𝑡
𝜉 𝑥B, 𝑡𝛽(‖𝑥B − 𝑥D‖, 𝑡)

FeedbackFridayPresentationEMSOFT2016⋅ Locallyoptimalreachability⋅ Chuchu Fan⋅ UIUC
7
Asimpleexampleofdiscrepancyfunction
If𝑓(𝑥)hasaLipschitzconstant𝐿:
∀𝑥, 𝑦 ∈ ℝ-, 𝑓 𝑥 − 𝑓 𝑦 ≤ 𝐿 𝑥 − 𝑦
Example:�� = −2𝑥,Lipschitzconstant𝐿 = 2
thena(bad)discrepancyfunctionis
𝜉 𝑥B, 𝑡 − 𝜉(𝑥D, 𝑡) ≤ 𝑥B − 𝑥D 𝑒MN = 𝛽 𝑥B − 𝑥D , 𝑡
𝑥B
𝑥D𝜉 𝑥D, 𝑡
𝜉 𝑥B, 𝑡𝛽(‖𝑥B − 𝑥D‖, 𝑡)

FeedbackFridayPresentationEMSOFT2016⋅ Locallyoptimalreachability⋅ Chuchu Fan⋅ UIUC
8
Asimpleexampleofdiscrepancyfunction
�� = −2𝑥,Lipschitzconstant𝐿 = 2, 𝛿 = 1
𝑥B
𝑥D𝜉 𝑥D, 𝑡
𝜉 𝑥B, 𝑡𝛽(‖𝑥B − 𝑥D‖, 𝑡)
FeedbackFridayPresentationEMSOFT2016⋅ Locallyoptimalreachability⋅ Chuchu Fan⋅ UIUC
𝛽(‖𝑥B − 𝑥D‖, 𝑡)𝑥B
𝑥D𝜉 𝑥D, 𝑡
𝜉 𝑥B, 𝑡
9
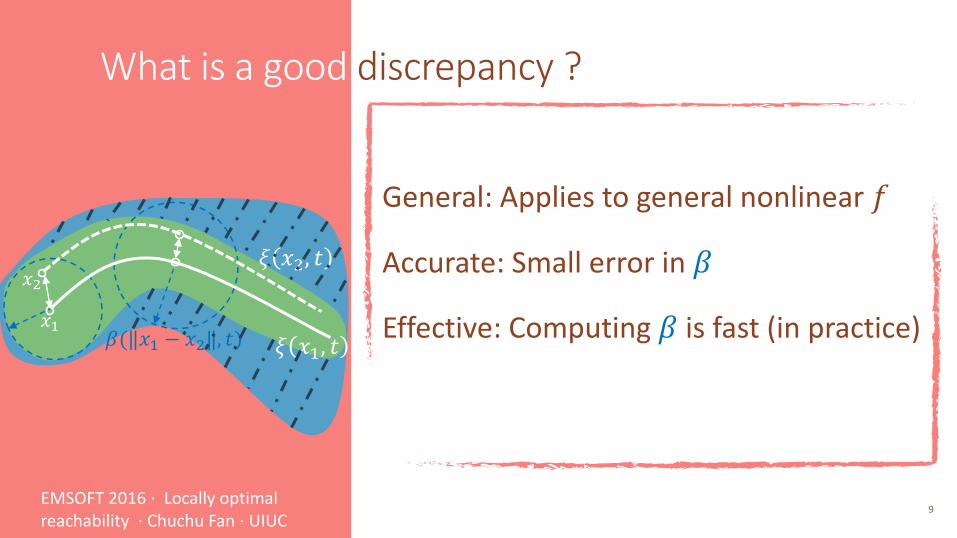
Whatisagooddiscrepancy?
General:Appliestogeneralnonlinear𝑓
Accurate:Smallerrorin𝛽
Effective:Computing𝛽isfast(inpractice)

EMSOFT2016⋅ Locallyoptimalreachability⋅ Chuchu Fan⋅ UIUC
Matrixmeasures can givetightdiscrepancy
Theorem [Sontag10]: For any 𝒟 ⊆ ℝ-,if all trajectoriesstarting from the line betweenanytwoinitialstates𝑥B and𝑥Dremainsin𝒟then: 𝜉 𝑥B, 𝑡 − 𝜉 𝑥D, 𝑡 ≤ 𝑥B − 𝑥D 𝑒QN,
where c = max$∈𝒟
𝜇 𝐽 𝑥 and
𝜇 𝐽 𝑥 is amatrix measure of Jacobian
𝐽 𝑥 = XYZ $X$[
istheJacobianmatrixoff
This𝑐 can be <0, usually <<Lipschitz constant
10
𝒟
𝑥B
𝑥D 𝜉 𝑥D, 𝑡
𝜉 𝑥B, 𝑡
Example: ���� = 𝑣D + 𝑤D
−𝑣
Jacobian:𝐽 𝑣𝑤 = 2𝑣 2𝑤
−1 0

EMSOFT2016⋅ Locallyoptimalreachability⋅ Chuchu Fan⋅ UIUC
Matrixmeasurefor 𝐴 ∈ ℝ-×-
Matrixmeasure[Dahlquist 59]:
𝜇 𝐴 = limN→/f
𝐼 + 𝑡𝐴 − 𝐼𝑡
2-norm:𝜇(𝐴) = 𝜆ij$klkm
D
11
Matrixnorm
𝐴 = max$n/
𝐴𝑥𝑥
𝐴 D = 𝜆ij$(𝐴o𝐴)�

EMSOFT2016⋅ Locallyoptimalreachability⋅ Chuchu Fan⋅ UIUC
Matrixmeasure[Desoer 72]:
𝜇 𝐴 = limN→/f
𝐼 + 𝑡𝐴 − 𝐼𝑡
2-norm:𝜇(𝐴) = 𝜆ij$klkm
D
Definitionofmatrixmeasures
12
Foranymatrix𝐴 ∈ ℝ-×-
Matrixnorm
𝐴 = max$n/
𝐴𝑥𝑥
𝐴 D = max 𝜆ij$(𝐴o𝐴)�
𝑐 = max$∈𝒟
𝜇 𝐽 𝑥 ①
≡ 𝑐 = max$∈𝒟
limN→/f
𝐼 + 𝑡𝐽 𝑥 − 𝐼𝑡 ②
min 𝑐
s.t. ∀𝐴 ∈ 𝒜 𝒟, 𝐽 , 𝑀𝐴 + 𝐴o𝑀 ≼ 2𝑐𝐼
𝑀 ≻ 0
…FromoriginalproblemtoanSDPprobleminthenextslides

EMSOFT2016⋅ Locallyoptimalreachability⋅ Chuchu Fan⋅ UIUC
Baselinealgorithmwith2-norm[FanandMitraATVA15]
Choosingordinarymatrix2-norm,𝜇 𝐽 𝑥 becomes:
𝜆ij$𝐽 𝑥 + 𝐽o 𝑥
2
[ATVA15]useseigenvalueofcenterJacobianmatrixandperturbationboundtomaximizethisquantityover𝒟
[CAV15]applicationtoPowertrainverificationproblem[Jin 16]
[CAV16]toolC2E2implementingthisalgorithm
13

FeedbackFridayPresentationEMSOFT2016⋅ Locallyoptimalreachability⋅ Chuchu Fan⋅ UIUC
14
Coordinatetransformationmakesreachtubetighter
Under2-norm,approximationsarerepresentedbyspheres
Usinglinearcoordinatetransformationsofstate,wecangettighterover-approximationswithellipsoids
Undercoordinatetransformation𝑃:matrixmeasureis𝜇| 𝐴 = 𝜇(𝑃𝐴𝑃}B)
𝑥B
𝑥D𝜉 𝑥D, 𝑡
𝜉 𝑥B, 𝑡𝛽(‖𝑥B − 𝑥D‖, 𝑡)

FeedbackFridayPresentationEMSOFT2016⋅ Locallyoptimalreachability⋅ Chuchu Fan⋅ UIUC
15
Coordinatetransformationmakesreachtubetighter
Under2-normapproximationsarerepresentedbyspheres
Usinglinearcoordinatetransformationsofstate,wecangettighterover-approximationswithellipsoids
Undercoordinatetransformation𝑃:matrixmeasureis𝜇| 𝐴 = 𝜇(𝑃𝐴𝑃}B)
𝑥B
𝑥D𝜉 𝑥D, 𝑡
𝜉 𝑥B, 𝑡𝛽(‖𝑥B − 𝑥D‖, 𝑡)
𝑐 = max$∈𝒟
𝜇 𝐽 𝑥 ①
≡ 𝑐 = max$∈𝒟
limN→/f
𝐼 + 𝑡𝐽 𝑥 − 𝐼𝑡
②
≡ 𝑐 = max$∈𝒟
𝜆ij$𝑃𝐽 𝑥 𝑃}B + (𝑃}B)o𝐽 𝑥 𝑃o
2 ③
Plugindefinition[Originalproblem]
[Usingcoordinatetransformation]

EMSOFT2016⋅ Locallyoptimalreachability⋅ Chuchu Fan⋅ UIUC
𝒟
𝑥B
𝑥D 𝜉 𝑥D, 𝑡
𝜉 𝑥B, 𝑡
ApproximatingJ(x)withanintervalmatrix
𝒟 isacompactset
Each𝐽��: 𝒟 → ℝ iscontinuousandhasupper(𝑢��) andlowerbounds(𝑙��)
Computeintervalmatrix𝒜(𝒟, 𝐽) =
[∗,∗] ⋯ [∗,∗]⋮ [𝑙��, 𝑢��] ⋮
[∗,∗] ⋯ [∗,∗]
Forall𝑥 ∈ 𝒟, 𝐽 𝑥 ∈ 𝒜(𝒟, 𝐽) 𝐽(𝑥)
16
𝑐 = max$∈𝒟
𝜇 𝐽 𝑥
≡ 𝑐 = max$∈𝒟
limN→/f
𝐼 + 𝑡𝐽 𝑥 − 𝐼𝑡
≡ 𝑐 = max$∈𝒟
𝜆ij$𝑃𝐽 𝑥 𝑃}B + (𝑃}B)o𝐽 𝑥 𝑃o
2

EMSOFT2016⋅ Locallyoptimalreachability⋅ Chuchu Fan⋅ UIUC
𝒟
𝑥B
𝑥D 𝜉 𝑥D, 𝑡
𝜉 𝑥B, 𝑡
ApproximatingJ(x)withanintervalmatrix
𝒟 isacompact
Each𝐽��: 𝒟 → ℝ iscontinuousandthereforehasupper(𝑢��) andlowerbounds(𝑙��) over𝒟
𝒜(𝒟, 𝐽) = [∗,∗] ⋯ [∗,∗]⋮ [𝑙��, 𝑢��] ⋮
[∗,∗] ⋯ [∗,∗]
𝐽(𝑥)
17
𝑐 = max$∈𝒟
𝜇 𝐽 𝑥 ①
≡ 𝑐 = max$∈𝒟
limN→/f
𝐼 + 𝑡𝐽 𝑥 − 𝐼𝑡
②
≡ 𝑐 = max$∈𝒟
𝜆ij$𝑃𝐽 𝑥 𝑃}B + (𝑃}B)o𝐽 𝑥 𝑃o
2 ③
⇐ maxk∈𝒜 𝒟,�
𝜆ij$𝑃𝐴𝑃}B + (𝑃}B)o𝐴𝑃o
2④
[Originalproblem]
[Usingcoordinatetransformation]
[Bound𝐽(𝑥) withintervalmatrix]

EMSOFT2016⋅ Locallyoptimalreachability⋅ Chuchu Fan⋅ UIUC
Makeitasemi-definiteproblem
18
maxk∈𝒜 𝒟,�
𝜆ij$|k|��l(|��)mk|m
D
≡ min 𝑐
s.t. ∀𝐴 ∈ 𝒜 𝒟, 𝐽 𝑃𝐴𝑃}B + (𝑃}B)o𝐴𝑃o ≼ 2𝑐𝐼
≡ min 𝑐
s.t. ∀𝐴 ∈ 𝒜 𝒟, 𝐽 , 𝑀𝐴 + 𝐴o𝑀 ≼ 2𝑐𝐼
𝑃o 𝑃 𝑃o 𝑃 𝑃o𝑃𝑃o𝑃𝐴 +𝐴𝑃o𝑃 ≼ 2𝑐𝐼{𝑀
{
𝑀
𝑐 = max$∈𝒟
𝜇 𝐽 𝑥
≡ 𝑐 = max$∈𝒟
limN→/f
𝐼 + 𝑡𝐽 𝑥 − 𝐼𝑡
≡ 𝑐 = max$∈𝒟
𝜆ij$𝑃𝐽 𝑥 𝑃}B + (𝑃}B)o𝐽 𝑥 𝑃o
2
⇐ maxk∈𝒜 𝒟,�
𝜆ij$𝑃𝐴𝑃}B + (𝑃}B)o𝐴𝑃o
2
𝒟
𝑥B
𝑥D 𝜉 𝑥D, 𝑡
𝜉 𝑥B, 𝑡
𝑥B − 𝑥D �𝑒QN

EMSOFT2016⋅ Locallyoptimalreachability⋅ Chuchu Fan⋅ UIUC
BoundthematrixmeasurebysolvingSDPproblem
OPT1:min𝑐s. t. 𝑀𝐴 + 𝐴o𝑀 ≼ 2𝑐𝑀, ∀𝐴 ∈ 𝒜(𝒟, 𝐽)
𝑀 ≻ 0
Theorem. Thesolution𝑐 ofOPT1giveslocally
optimal discrepancy 𝑥B − 𝑥D �𝑒QN.
Givessmallest𝑐 foranychoiceofMoverD
NotanordinarySDP,infinitenumberofconstraints!
19
𝒟
𝑥B
𝑥D 𝜉 𝑥D, 𝑡
𝜉 𝑥B, 𝑡
𝑥B − 𝑥D �𝑒QN

EMSOFT2016⋅ Locallyoptimalreachability⋅ Chuchu Fan⋅ UIUC
Vertexmatrixalgorithm
20
𝒜(𝒟, 𝐽) =[∗,∗] ⋯ [∗,∗]⋮ ⋱ ⋮
[∗,∗] ⋯ [∗,∗]=interval 𝐵, 𝐶
where
𝐵 = ∗ ⋯ ∗⋮ ⋱ ⋮∗ ⋯ ∗
,C = ∗ ⋯ ∗⋮ ⋱ ⋮∗ ⋯ ∗
Foranyintervalmatrix𝒜(𝒟, 𝐽)=interval 𝐵, 𝐶 , itsvertexmatricesare:
𝒱 = 𝑉 ∈ ℝ-×- 𝑣�� = 𝑏�� ∨ 𝑣�� = 𝑐��}
Theorem.OPT1≡
OPT2:min𝑐
s. t. ∀𝑉 ∈ 𝒱, 𝑀𝑉 + 𝑉o𝑀 ≼ 2𝑐𝑀
𝑀 ≻ 0
Potentially2-¢ ofinequalities
OPT1:min𝑐s. t. 𝑀𝐴 + 𝐴o𝑀 ≼ 2𝑐𝑀, ∀𝐴 ∈ 𝒜(𝒟, 𝐽)
𝑀 ≻ 0
EMSOFT2016⋅ Locallyoptimalreachability⋅ Chuchu Fan⋅ UIUC
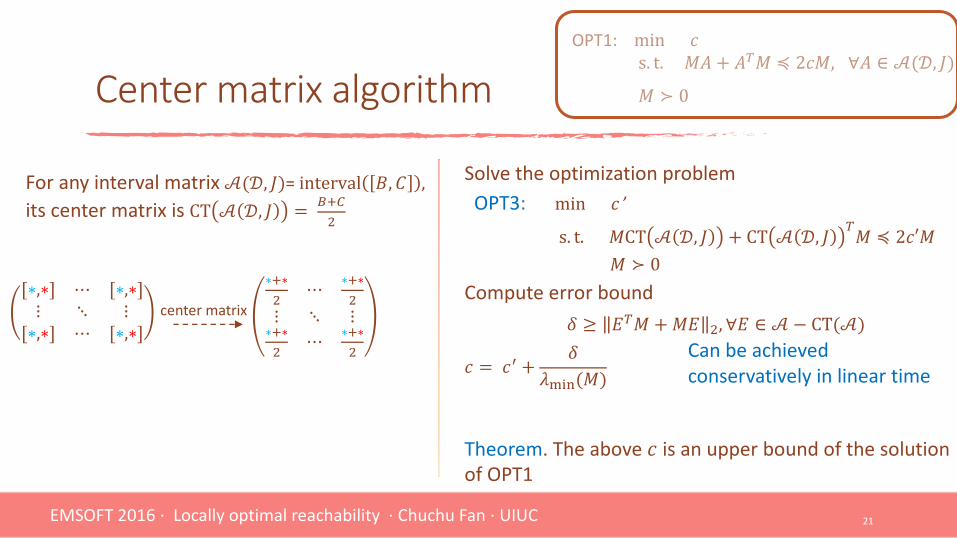
Centermatrixalgorithm
21
Foranyintervalmatrix𝒜(𝒟, 𝐽)=interval 𝐵, 𝐶 ,itscentermatrixisCT 𝒜 𝒟, 𝐽 = ¤l¥
D
[∗,∗] ⋯ [∗,∗]⋮ ⋱ ⋮
[∗,∗] ⋯ [∗,∗]
∗l∗D
⋯ ∗l∗D
⋮ ⋱ ⋮∗l∗D
⋯ ∗l∗D
centermatrix
SolvetheoptimizationproblemOPT3:min𝑐’
s. t. 𝑀CT 𝒜 𝒟, 𝐽 + CT 𝒜 𝒟, 𝐽 o𝑀 ≼ 2𝑐′𝑀𝑀 ≻ 0
Computeerrorbound𝛿 ≥ 𝐸o𝑀 +𝑀𝐸 D, ∀𝐸 ∈ 𝒜 − CT(𝒜)
𝑐 = 𝑐ª +𝛿
𝜆«¬(𝑀)
Theorem.Theabove𝑐 isanupperboundofthesolutionofOPT1
OPT1:min𝑐s. t. 𝑀𝐴 + 𝐴o𝑀 ≼ 2𝑐𝑀, ∀𝐴 ∈ 𝒜(𝒟, 𝐽)
𝑀 ≻ 0
Canbeachievedconservativelyinlineartime

EMSOFT2016⋅ Locallyoptimalreachability⋅ Chuchu Fan⋅ UIUC
Howtocomputetheerrorbound
Computeerrorbound 𝛿 ≥ 𝐸o𝑀 +𝑀𝐸 D, ∀𝐸 ∈ 𝒜 − CT(𝒜)
isequivalentto𝛿 ≥ ℰ D,whereℰ = 𝒜 − CT 𝒜 o𝑀 +𝑀 𝒜 − CT 𝒜 isalsoanintervalmatrix
Intervalmatrixnorm: 𝒜 = supk∈𝒜
𝐴
Theorem:foranyintervalmatrix𝒜 = interval 𝐵, 𝐶 ,for𝑝 = 1,∞
𝒜 ± =¤l¥D
+ ¥}¤D ±
22

EMSOFT2016⋅ Locallyoptimalreachability⋅ Chuchu Fan⋅ UIUC
Puttingitalltogether
Upper-bounding withasinglecforentiretimehorizoncan be tooconservative
Compute piece-wiseor local upper-bounds
Thatis,M¬, 𝑐� foreachtimeinterval𝑡�, 𝑡�lB inT
𝑥B = −𝑥D;𝑥D = 𝑥BD − 1 𝑥D + 𝑥B;
23

EMSOFT2016⋅ Locallyoptimalreachability⋅ Chuchu Fan⋅ UIUC
𝑥/
Puttingitalltogether
upper-bounding matrix measure forall𝑡 can betooconservative
Compute piece-wiseor local upper-bounds on thematrix measure
Divide 0, 𝑇 into𝑁 consecutivetimeintervals,and
ComputeexponentofdiscrepancyM¬, 𝑐� foreachtimeinterval 𝑡�, 𝑡�lB
24
𝜉 𝑥/, 𝑡
𝑡B𝑡/
𝑴𝟎, 𝒄𝟎
𝑡D
𝑴𝟏, 𝒄𝟏 …

EMSOFT2016⋅ Locallyoptimalreachability⋅ Chuchu Fan⋅ UIUC
Locallyoptimalalgorithms:accuracy
25
(Arbitraryprecision)Approximationerror→ 0whensizeoftheinitialset𝛿 → 0
(Asymptoticconvergence)Approximationerror→0 as𝑡 → ∞ forcontractivenonlinearsystemandstablelinearsystems

EMSOFT2016⋅ Locallyoptimalreachability⋅ Chuchu Fan⋅ UIUC
𝒟
𝑥B
𝑥D
𝜉 𝑥D, 𝑡
𝜉 𝑥B, 𝑡
Algorithmusing2-norm(withouttransformation)
Matrixperturbationtheorem[Teschl,99]:If𝐴 and𝐸 are𝑛×𝑛 symmetricmatrices,then
𝜆º 𝐴 + 𝐸 − 𝜆º 𝐴 ≤ 𝐸 D
Method[Fan15]:
- Findthecenterpoint𝑑/ of 𝒟,compute 𝐽Q = 𝐽(𝑑/)
- Computethelargesteigenvalue 𝜆 of 𝑆𝐽Q = (𝐽Qo + 𝐽Q)/2
- Computeerrorbound 𝑒 ≥ 𝑆𝐽 𝑥 − 𝑆𝐽Q D, ∀𝑥 ∈ 𝒟
- 𝑐 = 𝜆 + 𝑒
26
𝑑/
𝜇 𝐽 𝑥 ≤ 𝑐
min𝑐s. t. 𝑀𝐴 + 𝐴o𝑀 ≼ 2𝑐𝑀, ∀𝐴 ∈ 𝒜 𝒟, 𝐽
𝑀 ≻ 0
Let𝑀 = 𝐼,𝑐 canbecomputedwithoutsolvingtheoptimizationproblem

EMSOFT2016⋅ Locallyoptimalreachability⋅ Chuchu Fan⋅ UIUC
Summary:Locallyoptimaldiscrepancy
Methods
Baselinealgorithm Locallyoptimalalgorithms
Largesteigenvalueofcentermatrixandperturbationbound
Vertexmatrix Centermatrix
#optimizationproblems 01convexproblem with
upto2-¢ + 1constraints
1convexproblem withupto2 constraints
Tightness ofthediscrepancy
Nolocaloptimalityguarantee Locallyoptimal Locally optimalforthe
centermatrix
27

EMSOFT2016⋅ Locallyoptimalreachability⋅ Chuchu Fan⋅ UIUC
Runningtimecomparison
0.1
1
10
100
1000
10000
Flow*
LocallyoptimalAlgorithm
BaselineAlgorithm
Seconds
28
2 28Dimension

EMSOFT2016⋅ Locallyoptimalreachability⋅ Chuchu Fan⋅ UIUC
Accuracycomparison
0.1
1
10
100
1000
10000
100000
1000000
10000000
100000000
1E+09 1E+10
0.1
100000000
1E+17
1E+26
1E+35
1E+44
1E+53
1E+62
Laub-Loomis BiologyModelASPolynomialHelicopter(L)
Flow*
LocallyoptimalAlgorithm
BaselineAlgorithm
29

EMSOFT2016⋅ Locallyoptimalreachability⋅ Chuchu Fan⋅ UIUC
Futuredirections:Applicationsinautomotivesystems
30
sx (blue):relativedistancealongroaddirectionsy (green):relativedistanceorthogonaltosx

EMSOFT2016⋅ Locallyoptimalreachability⋅ Chuchu Fan⋅ UIUC
Debuggingsystemswithhigh-fidelitymodels
31

EMSOFT2016⋅ Locallyoptimalreachability⋅ Chuchu Fan⋅ UIUC
Summaryandfuturedirections
Simulation+discrepancyanalysis⇒ proofs(reachtube)
Discrepancyanalysisinfluencesefficiencyandconservativenessofverification
Matrixmeasuresenableautomaticlocallyoptimalreachabilityanalysis
Future:methodsforsystemswithpartiallyknownmodels
32

EMSOFT2016⋅ Locallyoptimalreachability⋅ Chuchu Fan⋅ UIUC
LinksandreferencesPictureslinks:https://images.google.com/
References:
[Dahlquist 59]G.DAHLQUIST,Stabilityanderrorboundsinthenumericalintegrationsofordinarydifferentialequations,Trans.Roy.Inst.Tech.Stockholm130(1959).[Jin 16]Jin,Xiaoqing,etal."Powertraincontrolverificationbenchmark."Proceedingsofthe17thinternationalconferenceonHybridsystems:computationandcontrol.ACM,2014.[Sontag10]E.D.Sontag,“Contractivesystemswithinputs,”inPerspectivesinMathematicalSystemTheory,Control,andSignalProcessing.Berlin,Germany:Springer-Verlag,2010,pp.217–228.[Fan15]Fan,Chuchu,andSayan Mitra."Boundedverificationwithon-the-flydiscrepancycomputation."InternationalSymposiumonAutomatedTechnologyforVerificationandAnalysis.SpringerInternationalPublishing,2015.[Fan16]Fan,Chuchu,etal."AutomaticReachabilityAnalysisforNonlinearHybridModelswithC2E2."InternationalConferenceonComputerAidedVerification.SpringerInternationalPublishing,2016.
33

Thank you
for your precioustimeandattention