Embed Size (px)
DESCRIPTION
transients analysis
Citation preview

CURRENT INTERRUPTION USING
HIGH VOLTAGE AIR-BREAK DISCONNECTORS
PROEFSCHRIFT
ter verkrijging van de graad van doctor aan de Technische Universiteit Eindhoven, op gezag van de
Rector Magnificus, prof.dr. R.A. van Santen, voor een commissie aangewezen door het College voor
Promoties in het openbaar te verdedigen op dinsdag 16 maart 2004 om 16.00 uur
door
David Francis Peelo
geboren te Dublin, Ierland

Dit proefschrift is goedgekeurd door de promotoren: prof.dr.ir. R.P.P. Smeets en prof.ir. L. van der Sluis CIP-DATA LIBRARY TECHNISCHE UNIVERSITEIT EINDHOVEN Peelo, David F. Current interruption using high voltage air-break disconnectors / by David F. Peelo. – Eindhoven : Technische Universiteit Eindhoven, 2004. Proefschrift. – ISBN 90-386-1533-7 NUR 959 Trefw.: hoogspanningsschakelaars / boogontladingen / elektrische doorslag. Subject headings: switchgear / switching / circuit-breaking arcs / electric breakdown.

i
A great flame follows a tiny spark.
—Dante Alighieri (1265–1321)
To my wife Anna-Lena, my children Anna-Maria and Nicholas and
my granddaughters Anna and Emelie


iii
SUMMARY
High voltage air-break disconnectors are intended for use as isolators and as such are oper-ated under energized conditions. The disconnectors will therefore be required to interrupt unloaded transformer magnetizing, capacitive or loop currents in air dependent on the cir-cumstances and the practices of individual utilities. Each of these switching duties is unique in terms of the arc-circuit interaction, arc sustainability and arc extinction. This research investigates this arc behaviour with particular emphasis on the loop switching case.
The interruption of unloaded transformer magnetizing currents of 1 A or less is mainly dependent on achieving a sufficient disconnector contact gap spacing to withstand the tran-sient recovery voltage. For currents greater than 1 A, thermal effects come into play and will promote longer arcing times. Inrush current may occur, also having the effect of prolonging the arcing time but not the arc length. The interruption process is one of repetitive break-restrike with associated restriking overvoltages. The impact of the overvoltages on the trans-former insulation structures is a matter for consideration.
For capacitive currents of 1 A or less, successful interruption is dependent on achieving the minimum disconnector contact gap spacing to withstand the recovery voltage and on the ratio of the source and load side capacitances CS/CL. For currents greater than 1 A, thermal effects add to the complexity of the interruption process. The longest arcing times and highest restriking overvoltages occur when CS/CL < 1. The explanation for this lies in the magnitude of the equalization voltage immediately after restriking relative to the source voltage and the associated restrike current magnitudes. A number of arcing modes can be identified depen-dent on the current magnitude and CS/CL.
The loop switching case is more complex with current interruption having the obvious dependency on the current magnitude and the loop impedance. The switching duty is one of current commutation from one circuit to a parallel circuit and arc extinction follows an initial arc instability. The research shows that the condition for arc instability is similar to that for an arc in a DC circuit. Potential for arc modelling is examined with a view to enabling simula-tion of this duty.
The research is principally based on tests and observations on vertical break and centre-break type disconnectors. The extension of the research results and conclusions to double-break and pantograph type disconnectors is discussed as is suggestions for further research into the subject.

iv
SAMENVATTING
Titel: “Het schakelen van stromen met hoogspanningsscheiders in open-lucht opstelling”
Hoogspanningsscheiders hebben als functie netdelen te isoleren en worden geschakeld onder spanning.
Scheiders zullen derhalve kleine stromen moeten onderbreken die oftewel capacitief van karakter zijn, oftewel inductief (als magnetiseringsstroom van onbelaste transformatoren) oftewel het gevolg zijn van een commutatie schakeling, afhankelijk van de praktijken in de diverse energiebedrijven.
Elk van deze schakelhandelingen is uniek in termen van wisselwerking tussen boog en circuit, de mogelijkheden tot in stand blijven van de boog en uiteindelijk de onderbreking.
Deze studie onderzoekt dit booggedrag in scheiders in open-lucht opstelling, met vooral aandacht voor het commutatief schakelen: het forceren van bedrijfsstroom uit een netdeel naar een parallel geschakelde tak.
Het onderbreking van magnetiseringsstromen in onbelaste transformatoren van 1 A of minder wordt vooral bepaald door het bereiken van een afstand tussen de scheider contacten, voldoende groot om de transiënte wederkerende spanning te kunnen weerstaan. Bij stromen groter dan 1 A gaan thermische processen een rol spelen, die langere boogtijden zullen veroorzaken. Inrush stromen kunnen optreden; deze zullen de boogtijd verlengen, maar vergroten niet de lengte van de boog. Het onderbrekings-proces wordt hier gekenmerkt door een opeenvolging van onderbrekingen en herontstekingen, met de daarbij behorende overspanningen. De gevolgen van deze overspanningen op de isolatie van transformator wikkelingen moeten in acht genomen worden.
In het geval van capacitieve stromen van 1 A of minder, wordt een geslaagde onderbreking ten eerste bepaald door het bereiken van een minimale afstand tussen de scheider contacten om de wederkerende spanning te kunnen weerstaan en ten tweede door de verhouding van bron- en lastzijde capaciteit Cs/Cl.
Voor stromen groter dan 1 A, maken thermische processen het onderbreken complexer. De langste boogtijden en de hoogste overspanningen als gevolg van herontstekingen treden op wanneer Cs/Cl < 1. De verklaring hiervoor moet gezocht worden in de grootte van de vereffeningsspanning meteen na de herontsteking ten opzichte van de bronspanning enerzijds, en in de grootte van de bijbehorende stromen anderzijds. Een aantal verschijningsvormen van de boog kan worden vastgesteld, afhankelijk van de grootte van de stroom en de verhouding Cs/Cl.
Het commutatief schakelen is ingewikkelder, waarbij de stroom onderbreking wordt bepaald door de grootte van de stroom en de impedantie van de lus waarin de commutatie plaats vindt. De schakelhandeling bestaat uit commutatie van stroom uit een circuit naar een parallel circuit waarbij het doven van de boog het gevolg is van een aanvankelijke instabiliteit.
Dit onderzoek toont aan dat de voorwaarde voor het optreden van een degelijke instabiliteit analoog is aan die van een gelijkstroom boog.
De mogelijkheden van boog modellering zijn onderzocht met het oog op simulatie van deze schakelhandeling.
Dit onderzoek richt zich met name op beproevingen en waarnemingen van scheiders met vertikaal bewegende armen, en scheiders met een centrale scheiding. De extrapolatie van de onderzoeks resultaten en -conclusies naar scheiders met dubbele onderbreking en pantograaf scheiders wordt behandeld, en is als aanbeveling voor verder onderzoek op dit gebied neergelegd.

v
CONTENTS
Summary............................................................................................................ iii
Samenvatting ......................................................................................................iv
1. High voltage air-break disconnectors .......................................................1 1.1 Introduction..............................................................................................................1 1.2 Standards..................................................................................................................6 1.3 Bus and station arrangements ..................................................................................8 1.4 Perspective .............................................................................................................10 1.5 Objective of the research .......................................................................................10
2. Literature review.......................................................................................13 2.1 Introduction............................................................................................................13 2.2 Transformer magnetizing currents .........................................................................16 2.3 Capacitive currents.................................................................................................19 2.4 Loop currents .........................................................................................................20 2.5 Free burning arcs in air ..........................................................................................22 2.6 Conclusions............................................................................................................30
3. Interrupting transformer magnetizing current .....................................33 3.1 Introduction............................................................................................................33 3.2 Analysis..................................................................................................................34 3.3 Restriking and its consequences ............................................................................36 3.4 Inrush currents .......................................................................................................36 3.5 Auxiliary interrupting devices ...............................................................................40 3.6 Conclusions............................................................................................................45
4. Interrupting capacitive currents..............................................................47 4.1 Introduction............................................................................................................47 4.2 Analysis..................................................................................................................47 4.3 Auxiliary interrupting devices ...............................................................................49 4.4 Field experience .....................................................................................................49 4.5 Video record review...............................................................................................50 4.6 Capacitive current switching tests 2003 ................................................................63 4.7 Conclusions............................................................................................................70
5. Loop switching...........................................................................................71 5.1 Introduction............................................................................................................71 5.2 Loop switching tests 1999–2000 ...........................................................................71
5.2.1 Initial current, loop impedance and arcing time ........................................72 5.2.2 Arc video record analysis...........................................................................77 5.2.3 Application perspective .............................................................................84
5.3 Electrical characteristics of the arc ........................................................................93 5.4 Conclusions..........................................................................................................110

vi
6. Discussion on use of other disconnector types......................................113
7. General conclusions and suggestions for further research .................117
8. References ................................................................................................119
Annex A Transformer transient recovery voltages.................................125
Annex B EHV transformer switching case study....................................129
Annex C Video still images: Figures C1 to C60 ......................................137
Annex D Auxiliary interrupting devices and capacitive currents .........147
Annex E Comparative analysis of loop switching tests by Andrews, Janes and Anderson ...................................................................157
Annex F Influence of weather...................................................................163
Acknowledgments ...........................................................................................167
Curriculum Vitae ............................................................................................168

Section 1
1
High voltage air-break disconnectors
1.1 Introduction
The function of air-break disconnectors in high voltage power systems is to provide electrical and visible isolation of one part of the system. The isolation generally takes two forms:
1. Isolation related to normal day-to-day operation of the power system. For example, shunt reactors required only during light load periods are switched out using circuit breakers and then isolated by disconnectors during peak load periods.
2. Isolation related to repair or maintenance on transmission lines or station equipment such as transformers, circuit breakers and so on.
In the latter regard, the disconnectors are a major contributer to personnel safety. In North America and no doubt similarly elsewhere, power system safety practices require a so-called guaranteed point of isolation with a visible break and a disconnector mechanically locked in the open position meets this requirement. If the disconnector is motor-operated, then the electrical circuit of the operator is also visibly isolated by means of a knife switch or a removable fuse link.
To serve the purpose of isolation, disconnectors are required to have a greater voltage with-stand capability across the open gap than to ground. The purpose of this is to ensure that surge voltages originating in the power system or due to lightning activity will more likely cause flashover to ground than across the open gap. At system voltages of 245 kV and below, this requirement adds at least 10% above the line to ground voltage withstand capability.1 At system voltages of 300 kV and above, the requirement is stated as a bias voltage test, i.e. an AC voltage applied to one side of the disconnector and a switching or lightning surge applied to the other.
To achieve isolation disconnectors are operated under energized conditions and will thereby interrupt current, the type of current being dependent on the circumstances. This interruption of current in air by disconnectors is the subject of this thesis.
To establish the background for the subject, this section further provides an overview of the following:
• the different types of high-voltage air break disconnectors in use; • the type and ranges of current to be interrupted by disconnectors; • how the subject is treated in standards; • typical bus and station arrangements.
The section concludes with a perspective on the need for this work and the objectives of this research effort.

Section 1
2
High voltage air-break disconnectors come in a variety of types and mounting arrangements. The four most commonly used types are:
• Vertical break type • Centre side break type • Double side break type • Pantograph type
Of these types, the vertical break type is the most used and is the type primarily considered in this thesis.
The vertical break disconnector is shown in Fig. 1.1. The active parts of the disconnector are the hinge end assembly, the blade and the jaw end assembly. The left-most insulator rotates to open or close the disconnector. The blade is shown open to about a 60° angle from the closed position, the hinge-end being to the left and the jaw end to the right. This disconnector type is usually horizontally mounted (base frame horizontal as shown in Fig. 1.1) but can also
be vertically mounted (base frame and active parts vertical) or, at medium voltage, inverted mounted (base frame horizontal with active parts also hori-zontal but underneath). Standard phase spacings are used and overhead clear-ances must be such as to accommodate the fully open disconnector blade.
The centre break disconnector is shown in Fig. 1.2. The active parts consist of two blades which make and break at the centre and both insulators rotate to open or close the disconnec-tor. This disconnector type is used mainly where overhead clearances are restricted but also where low substa-tion profiles are desired. Because the blades are reaching horizontally, the phase spacing must be increased above standard values and the disconnectors thus require a larger area than the ver-tical break type.
Fig. 1.1 Vertical break disconnector horizontally
mounted Courtesy of HAPAM B.V.

High voltage air-break disconnectors
3
The double break disconnector is a variation on the centre break type and is shown in Fig. 1.3. The active parts consist of two jaw assemblies, one at each end, and a rotating blade. The centre insulator rotates to open or close the disconnector. The disconnector requires an area somewhat greater than that for a centre break disconnector.
The pantograph switch, shown in Fig. 1.4, is used quite widely outside of North America and only to a very limited degree within North America. The active parts consist of a fixed
stirrup arrangement attached to busbar at the top, a scissor type blade and a hinge assembly at the bottom. The smaller of the two insulators rotates to open or close the disconnector. This disconnector type clearly requires the least area and, in addition to providing isolation, also provides transitions from high to low busbars.
Because disconnectors are expected to interrupt certain current levels as discussed later in this section, it is desirable to avoid arcing on the main contacts or on corona shields (refer to Fig. 1.1). For this reason disconnectors, usually by customer request, are equipped with arcing horns as shown in Fig. 1.5. The blade is provided with an arcing tip and on opening the current commutates from the main contacts to the arcing contacts thus achieving their purpose. On closing, making (prestrik-ing) occurs on the arcing horns. In North American terminology, a discon-nector equipped with arcing horns is referred to as a horn gap disconnector and requiring of a larger phase spacing than a disconnector without arcing horns. The arcing horns do not contrib-ute to current interruption but rather provide only a location for the arc to root itself.
Fig. 1.2 Centre break disconnector
Courtesy of HAPAM B.V.
Fig. 1.3 Double break disconnector
Courtesy of HAPAM B.V.

Section 1
4
The interrupting capability of discon-nectors can be increased by the addi-tion of auxiliary interrupting devices. These devices include gas-blast devices (no longer in use), vacuum switches, commutating devices and, most rele-vant to this work, whip type devices as shown in Figs. 1.6 and 1.7. These de-vices achieve a fast moving contact effect when the whip releases and are widely used in North America to inter-rupt transformer magnetizing current and small capacitive currents. The devices are discussed further in sections 3 and 4 and in Annex D.
High voltage air-break disconnectors do not have current interrupting ratings. However, by virtue of the fact that the
disconnectors have a fixed and a moving contact, they have a certain current interrupting capability. In brief here but discussed in detail later, the currents to be interrupted are as follows:
• Transformer magnetizing currents: The current at high voltage is usu-ally less than 2 A equivalent rms for modern low loss transformers and is non-sinusoidal with a high 3rd harmonic content. The recov-ery voltage that appears across the disconnector after current inter-ruption is the difference between the source side power frequency voltage and the transformer side damped low frequency (less than 300 Hz) oscillation.
• Capacitive currents: For busbars with connected instrument trans-formers, the current is less than 1 A but with some exceptions in the range 1 to 2 A (EHV series capacitor bank platforms). For short lines, currents up to 20 A
Fig. 1.5 Vertical break disconnector jaw assembly
showing the main contacts and the arcing horn Courtesy of HAPAM B.V.
Fig. 1.4 Pantograph disconnectors
Courtesy of HAPAM B.V.

High voltage air-break disconnectors
5
may be applicable. The recovery voltage that appears across the disconnector after current interruption is the difference between the source side power frequency voltage and the trapped DC charge related voltage on the busbar or line.
• Loop currents: Loop currents can be 100 A or more dependent on individual utility practice. The switching duty is a commutation or transfer of current from one circuit, such as a busbar or transmission line, to a parallel circuit. In the case of disconnectors, this is a natural commutation driven by arc voltage. As the arc voltage builds up, the current in the disconnector is gradually reduced to zero by transfer to the parallel cir-cuit. The power frequency voltage that appears across the disconnector after total current transfer is referred to as the open circuit voltage or, for the case of current transfer between busbars, as the bus-transfer voltage. For loop switching between transmission lines, the open circuit voltage can be as high as 6 or 7 kV, but in most cases is in the order of a few kV. For loop switching between busbars, the bus-transfer voltage is less than 1000 V.
Fig. 1.6 Quick-break whip type device on 115 kV vertical break disconnector
(closed position) Courtesy of Pacific Air Switches Corporation
Fig. 1.7 Quick-break whip type device operation (position just prior to
release of whip) Courtesy of Pacific Air Switches Corporation

Section 1
6
1.2 Standards
Disconnector standards recognize the existence of current interrupting capability. The Inter-national Electrotechnical Commission (IEC) defines a disconnector as:1
“A mechanical switching device which provides, in the open position, an isolating dis-tance in accordance with specific requirements.
NOTE: A disconnector is capable of opening and closing a circuit when either negligible current is broken or made, or when no significant change in the voltage across the termi-nals of each of the poles of the disconnector occurs. It is also capable of carrying currents under normal circuit conditions and carrying for a specified time currents under abnormal conditions such as short-circuit.”
Two additional notes are applicable:
“NOTE 1: “Negligible current” implies currents such as the capacitive currents of bush-ings, busbars, connections, very short lengths of cable, currents of permanently connected impedances of circuit-breakers and currents of voltage transformers and dividers. For rated voltages of 420 kV and below, a current not exceeding 0.5 A is a negligible current for the purpose of this definition; for rated voltages above 420 kV and currents exceeding 0.5 A, the manufacturer should be consulted.
“No significant change in voltage” refers to such applications as the bypassing of induc-tion voltage regulators or circuit-breakers.
NOTE 2: For a disconnector having a rated voltage of 52 kV and above, a rated ability of bus-transfer current switching may be assigned.”
With respect to Note 2 above, the applicable rated bus-transfer voltages are given in Annex B of reference 1 and for convenience shown below:

High voltage air-break disconnectors
7
Bus-transfer is loop switching between busbars within a substation. Gas insulated discon-nectors are those associated with gas insulated switchgear or GIS as it is commonly known. The loops formed by such switchgear are short compared to those found in air insulated switchgear arrangements and hence the lower recovery or bus-transfer voltages.
In North America, the term disconnecting or disconnect switch is used instead of disconnec-tor. Such a device is defined by the Institute of Electrical and Electronic Engineers (IEEE) as:2
“A mechanical switching device used for changing the connections in a circuit, or for isolating a circuit or equipment from the source of power.
NOTE: It is required to carry normal load current continuously and also abnormal or short-circuit currents for intervals as specified. It is also required to open or close circuits when negligible current is broken or made, or when no significant change in the voltage across the terminals of each of the switch poles occurs.”
The definitions are very similar both recognizing an ability to break negligible current. Only IEC, however, states specific values: up to 0.5 A of capacitive charging current and, for spe-cific disconnectors, a bus-transfer ability of 1600 A against open-circuit voltages of 100 V to 300 V (Annex B of reference 1).
An earlier version of an IEEE standard included the following note:3
“A disconnecting switch and a horn-gap switch have no interrupting rating. However, it is recognized that they may be required to interrupt the charging current of adjacent buses, supports and bushings. Under certain conditions, they may interrupt other relatively low currents, such as:
1. Transformer magnetizing current. 2. Charging currents of lines depending on length, voltage, insulation and other local
conditions. 3. Small load currents.”
Horn-gap disconnectors generally have wider phase spacings. The implication is that such are used to break currents and that some accommodation should be made for the reach of the arc towards other phases or grounded structures. In fact, this note recognizes that disconnectors are commonly used in North America to break small capacitive currents, transformer mag-netizing currents and loop currents. The standard was originally an American National Stan-dards Institute (ANSI) standard and was revised in 1992 to become an IEEE standard. At that time, the above-discussed note was removed. The reason for this was that a guide on current interruption had been developed4. The guide was based on the work of Andrews et al5 and Peelo.6 For reasons discussed later in sections 3 and 5 and Annex E, the guide should be viewed as questionable.

Section 1
8
1.3 Bus and station arrangements
It is evident that, essentially from conception, disconnectors were assumed to have a current interrupting capability. Bus arrangements in turn exploited this capability thus avoiding the use of more expensive load-break switches or circuit breakers. Examples of such bus arrangements are shown in Figs. 1.8 to 1.11. The bus arrangement and required disconnector current interrupting capability are as follows:
• Fig. 1.8 shows a single bus arrangement common at generating stations and the dis-connectors are expected to have unloaded transformer switching capability.
• Fig. 1.9 shows a double bus arrangement common outside of North America and the disconnectors shown are expected to have a bus-transfer loop switching capability.
• Fig. 1.10 shows an H-bus arrangement and the disconnects shown are expected to have an unloaded transformer switching capabil-ity.
• Fig. 1.11 shows a so-called Jones-type sub-transmission network arrangement common in North America. Circuit breakers CB2 and CB5 are normally open and to take line section LS1 out of service the sequence would be: close CB2, open disconnector B to loop switch the load current and then open dis-connector A to switch out the short line length. Disconnectors at the transformers are used to switch the unloaded units.
Fig. 1.10 H-bus arrangement
Fig. 1.8 Single bus arrangement
Fig. 1.9 Double bus arrangement

High voltage air-break disconnectors
9
Fig.
1.1
1 Jo
nes-
type
sub-
trans
mis
sion
net
wor
k ar
rang
emen
t

Section 1
10
1.4 Perspective
To put the foregoing discussion in perspective, we can state:
1. There is added-value in utilizing the (inherent) current interrupting capability of disconnectors; in fact, without that capability power systems would be difficult, if not im-possible, to operate.
2. Surveys conducted by the IEEE in 1949 and 1962 indicate the range of currents involved in the past which is not to say that they are applicable according to today’s practices.7, 8 The noted magnetizing currents in particular reflect the high loss transformers that were once common and now being replaced by larger low loss units with quite different transient recovery voltage characteristics. The surveys are discussed further in subsection 2.1.
3. Despite the often-cited work of Andrews et al,5 practice appears to be one of trial-and-error, i.e. if it worked once then it can be done again under the same circumstances. Establishing rules is not a trivial task, particularly given that the interrupting medium is atmospheric air and the arc is free-burning.
4. Looking to the future, deregulation is a major driver to operate power systems more effectively with fewer planned outages, even short-term outages. In addition, this is expected to be achieved with existing equipment and puts more onus on breaking circuits using disconnectors.
5. An overriding concern is personnel safety. Many disconnectors are manually operated with varying types of mechanical operators and the switching is subject to ongoing com-plaint and discussion.
1.5 Objective of the research
The use of air-break disconnectors to interrupt current has a mainly trial-and-error basis. The reason for this is that little or no research effort has been devoted to current interruption in atmospheric air and to the behaviour of the associated free burning arcs. Unlimited propaga-tion of the arc is obviously not permissible and its representation is not only as a time varying electrical element but also as a time varying physical element in space. The cases of interest are those of interrupting transformer magnetizing current, capacitive currents and loop cur-rents and are addressed in this work.
As shown in the literature review in section 2, no consideration has been given up to now to the conditions that must be satisfied in order for the current to be interrupted and such con-sideration is the purpose of this thesis. Consequently, the goal of this research is:
• to investigate and interpret free burning arc behaviour from an engineering perspective;

High voltage air-break disconnectors
11
• to advance the engineering basis for the use of air-break disconnectors for the above-noted switching duties;
• to determine arc model parameters for the loop switching case to enable simulation of this switching duty.
This research work is based on experiences and practices provided by BC Hydro, Bonneville Power Administration, Kinectrics Inc. (formerly Ontario Hydro Research), Manitoba Hydro and Puget Sound Energy. Testing associated with the work was performed during the period 1999–2003 at Powertech Laboratories Inc. in British Columbia, Canada and at the high power laboratories of Eindhoven University of Technology and KEMA in The Netherlands. Disconnector information was provided by HAPAM B.V. of Bunschoten, The Netherlands, who also made two disconnectors available for testing purposes at KEMA, and by Pacific Air Switches Corporation of Forest Grove, Oregon.


Section 2
13
Literature review
2.1 Introduction
Literature relating to current interruption using air-break disconnectors is quite sparse and comes almost exclusively from North American sources. The reason for this is probably the historically long practice of using disconnectors for this purpose as compared to the other parts of the world. Further literature of relevance is that relating to free-burning arcs in air and sourced from North America, Europe and Japan. The review is divided into four topics: transformer magnetizing currents, capacitive currents, loop switching and finally free-burning arcs in air. First, however, surveys of North American utility practices are considered.
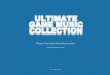
Surveys of actual practices were conducted by the AIEE (American Institute of Electrical Engineers later renamed to IEEE) in 1949,7 the IEEE in 19628 and by IREQ in 1979.9 In the 1949 survey, fifty-nine utilities of the time provided responses on successful interruption of magnetizing current (Fig. 2.1) and successful or unsuccessful interruption of line charging current (Fig. 2.2).
Respondents were asked to define successful operation and fifty replied as follows:
13 - arc is interrupted without operation of the protective relays or system short circuit but perhaps after disconnector is fully open.
37 - arc is interrupted before disconnector is fully opened.
Further comment or advice included recommending wider phase spacing and overhead clear-ances; using only vertical break disconnectors; and using operating mechanisms that allow the blades to open quickly, i.e. not the gear reduction type of mechanism.
0
2
4
6
8
10
12
14
16
0 50 100 150 200 250
Transformer voltage (kV)
Mag
netiz
ing
curr
ent (
A)
Fig. 2.1 1949 Survey: magnetizing current interruption using horn-gap
disconnectors7 © 1951 AIEE now IEEE

Section 2
14
0
5
10
15
20
25
0 50 100 150
System voltage (kV)
Char
ging
cur
rent
(A)
100% successful90 to 99% successful75 to 80% successful
Fig. 2.2 1949 Survey: interruption of line charging current using horn-gap
disconnectors7 © 1951 AIEE now IEEE
The IEEE 1962 survey was more comprehensive including breaking loop currents and recog-nizing the use of auxiliary arc quenching devices developed in the 1950s. These devices ranged from vacuum switches and quick-break (whip-type) devices to a blast device that actually blasted air, N2 or SF6 gas at the arc. The results of the survey based on responses from seventy-one utilities are shown in Figs. 2.3, 2.4 and 2.5.F1
0
2
4
6
8
10
12
14
16
0 100 200 300 400 500
Transformer voltage class (kV)
Mag
netiz
ing
curr
ent (
A)
100% successful
90 to 99%successful600 kVA rule
Power (600 kVArule)
Fig. 2.3 1962 Survey: magnetizing current interruption using air break disconnectors8
© 1966 IEEE
F1 The survey notes the existence of the “600 kVA rule” where the interrupting limit is given by: 3 × current × voltage across the open switch. The source of the rule is unknown and its use will be reviewed later.

Literature review
15
0
5
10
15
20
25
30
0 100 200 300 400 500
Voltage class (kV)
Line
cha
rgin
g cu
rren
t (A
)
100% successful
90 to 99%successfulWith quick-breakdevices600 kVA rule
Power (600 kVArule)
Fig. 2.4 1962 Survey: interruption of line charging currents using air
break disconnectors8 © 1966 IEEE
Respondents were also asked if they had standard guides for use in interrupting current with air break disconnectors. Fifty-nine utilities stated no guides in use; six utilities used “estab-lished rule of thumb operations based on past experience;” and three utilities based their deci-sions on manufacturer’s data. Only two utilities stated that they used the Andrews et al paper as a guide.5 This is interesting in that this paper is often cited as the classic, if not definitive, work in this field.
The 1979 survey was conducted by IREQ (Institute de recherche d’Hydro-Quebec) as part of a Canadian Electrical Association (CEA) sponsored project.9 The survey was addressed to Canadian utilities only with a total of twelve providing responses. The survey confirmed the use of disconnectors by all respondents to break currents and showed an increase in the use of auxiliary interrupting devices.
050
100150200250300350400450
0 50 100 150
Voltage class (kV)
Switc
hed
loop
cur
rent
(A)
100% successful
90 to 99% successful
Less than 90%successful
Fig. 2.5 1962 Survey: opening loop circuits using air disconnectors8
© 1966 IEEE

Section 2
16
2.2 Transformer magnetizing currents
The first experimental study of interrupting current using disconnectors was that of Andrews, Janes and Anderson of the Public Service Company of Northern Illinois in the 1940s.5, 10, 11 The study covered interrupting transformer magnetizing and line charging currents and loop switching. The study was based on two assumptions:
1. Arc length is proportional to voltage. 2. An unconfined arc should always extinguish itself if clearance permits the required
growth to a necessary critical length and the gap is wide enough to prevent restriking.
The assumptions have their basis in the work of Ackermann on transmission line power arcs.12 Ackermann explained the mechanics of arc extinction: the increasing length of the arc results in an increasing arc resistance and decreasing current until the arc attains a critical length at which it extinguishes itself. This explanation and its validity is discussed further in subsection 2.5.
Andrews et al thus viewed the evolving arc as the controlling element in current interruption using disconnectors. The study set out then to establish a relationship between current, volt-age, arc length and arc reach, where arc reach is “defined as the distance from a point midway between the arc extremities to the most remote point of the arc at the time of its maximum length” and is illustrated in Fig. 2.6. The magnetizing current interrupting tests were run in a
laboratory set-up on disconnectors in the range 12 kV to 49 kV and currents up to 35 A. The immediate observation that can be made is that the voltages are low (all being in the medium voltage range by today’s standards) and the current high (even for the transformer sizes of the day and those of later years, refer to Figs. 2.1 and 2.3). Arc lengths of up to 13 m were recorded and the overall results were presented in the form shown in Fig. 2.7. The quantities used in deriving Fig. 2.7 were the current at the beginning of the arcing period, the open-circuit voltage across the switch just after arc extinction and the arc length when it was at its longest point.
Fig. 2.6 Arc reach according to Andrews et al5

Literature review
17
No statistical analysis was done but a limiting envelope, i.e. limit of probable reach, was drawn. For the range up to 100 A, the limit of probable reach (LPR) is given by:
LPR = 5.03 UocI …(2.1)
where LPR is in mm, Uoc is the open circuit voltage across the disconnector in kV rms and I is the initial current interrupted in A rms. This equation has been widely cited even to the extent of being used in disconnector manufacturer catalogs to determine magnetizing current interruption ratings.13, 14 More detailed examination of the manner in which the tests were conducted leads to doubts as to its applicability. Interrupting magnetizing current, as will be discussed in section 3, is a repetitive break-and-restrike event with the possibility of inrush current on restriking and yet no mention is made of this in the reference. Successful magnet-izing current interruption relies on at least achieving a contact gap able to withstand the transient recovery voltage across the disconnector. This suggests that the test set-up used by Andrews et al resembled interrupting load current rather than magnetizing current; in fact, the one test trace reproduced in the reference supports this notion (Fig. 8 – quality is too poor for reproduction here): the initial current of 18 A rms is seen to decay to zero as the arc voltage rises to the value of the applied voltage over a period of 25 cycles. It is noteworthy that both Abetti10 and Gerngross11 expressed reservations about the manner in which these tests were conducted and the results obtained. Extrapolation using Eqn. (2.1) is likely to lead to mislead-ingly long arc reaches but conservative application, all notwithstanding the influence of inrush current.
Later reported tests by others on actual transformers confirm that unloaded transformer switching is other than as represented by Andrews et al. Anderson (not the author of the same name in reference 5) used a vertical break disconnector to switch an unloaded autotrans-former 90/120/150 MVA, 230/115.5 kV with a 13.2 kV tertiary.15 The high-side was wye-connected, solidly earthed neutral and the tertiary delta-connected. The magnitude of the magnetizing current was 1.73 A at 220 kV and the disconnector interrupted the current at
Fig. 2.7 Arc reach per kilovolt as a function of initial arc current5
© 1950 AIEE now IEEE

Section 2
18
contact gaps as short as 0.6 m. The arc was observed as being “uniformly thin and blue with little thermal energy” and of lengths in the range 0.6 m to 1.5 m depending on the source arrangement. The switching was further observed to be a repetitive break-restrike event and the occurrence of inrush current, albeit of very low magnitude, on restriking was noted. The influence of the delta-connected tertiary is interesting: with two phases conducting the third phase is energized by circulating current in the tertiary thus preventing prestriking or restrik-ing in that phase16 (refer also to Annex B). Sample oscillographic traces showed that the transient recovery voltages at the transformer were of a highly damped nature. Luehring and Fitzgerald also conducted unloaded transformer switching tests, this time on a 345 kV, 200 MVA autotransformer using a double-break disconnector.17 The disconnector interrupted 6.6 A with a maximum arcing time of 0.75 s at a combined contact gap spacing of about 0.9 m. The arcing time is about one-half that reported for a 330 kV vertical break disconnec-tor in similar circumstances.18 This is understandable because, for the same blade tip speed, the double-break disconnector will achieve the same total contact gap spacing in half the time. The result supports the notion that successful current interruption is related to estab-lishing a minimum contact gap spacing rather than a critical arc length.
Foti and Lakas reported results in agreement with Eqn. (2.1) but no details are provided.21
As part of the CEA sponsored study, IREQ performed a number of magnetizing current inter-ruption tests at 230 kV, 315 kV and 735 kV.9 Details of the transformers used are not provided but the current magnitudes ranged from 0.5 A to 9 A. The arc lengths and reaches were determined and while some of the normalized reach values (cm/kV) were found to approximately fit within the range reported by Andrews et al, many points were well below the trend line (Fig. 2.7) as shown in Fig. 2.8. However, any possible agreement would be coincidental rather than supportive because the two test series were run under totally different conditions, the only commonality being in the initial magnitudes of the currents. No mention is made in the CEA report of blade position at current interruption or inrush current. Over-voltages due to restriking were recorded at up to 1.5 pu.
In the early 1950s auxiliary interrupting devices began to be added to disconnectors. For unloaded transformer switching these tended to be whip-type spring-loaded devices17, 19 and gas-blast devices.20, 21, 23, 28 The former devices are still used and will be discussed further in this context and for capacitive currents. Gas-blast devices functioned by blasting the arc with compressed gas – usually air or nitrogen but also SF6 gas – to assist in extinguishing the arc. These devices are no longer in use. An alternative approach is to add insertion resistors.21, 22 These resistors are used at EHV levels and consist on a number of porcelain-clad resistors in series (each about 500 ohms) with contact rings at the top. As the blade opens, the arc makes contact with successive rings thus inserting an increasing resistance value. The resistor not only limits the overvoltage magnitudes due to restriking but also limits the associated inrush currents to low values. Likewise the resistor limits the inrush current due to pre-striking on closing the disconnector.

Literature review
19
2.3 Capacitive currents
Andrews et al conducted a number of line charging current interruption tests (this is usually called line dropping) at 132 kV.5, 10 Tests were run in the current range 2.2 to 22 A corre-sponding to line lengths of 8 to 50 km. The arc lengths and reaches were much longer than for the magnetizing current case due to the trapped charge effect. For example, at 20 A, an arc reach of 6.1 m was measured. The normalized arc reaches – reach divided by the applied voltage – were about four times the trend line shown in Fig. 2.7. The paper recommends that no more than 7 A of line charging current (about 27 km of line) be interrupted using 132 kV disconnectors.
The CEA study also reports on capacitive current switching tests.9 The test current levels were to be limited to 1.2 to 2.3 A and the normalized arc reaches were observed to be about four times those for magnetizing currents of similar magnitude.
Auxiliary interrupting devices are also used to enhance the interruption of capacitive currents. Whip-type devices were used by Rankin,23 Toomer24 and Patel et al.25 Rankin successfully dropped 32 km of 138 kV line (8 A) with such a device. Toomer applied the devices on
Fig. 2.8 Comparison between IREQ results (≥ 230 kV) and those of Andrews et al (≤ 138 kV) for magnetizing current
© CEA 1982
Nor
mal
ized
Arc
Rea
ch (c
m/k
V)

Section 2
20
115 kV disconnectors to drop up to 17 km of line. Patel et al ran a number of 115 kV line dropping tests with devices from different suppliers to determine the influence of parallel lines and line/configuration on line charging currents. The devices exhibited varying degrees of arcing for current in the range of 4 to 15 A.
Apart from the influence of weather conditions, there is evidence that the performance of whip-type devices in this application are subject to system conditions and line configura-tions26 and even phase spacing because of the coupling between phases.F2
Gas blast devices have also been used for this purpose.20, 21, 23, 27 None of these devices remain in use today. Lastly, insertion resistors have been at EHV levels mainly for overvolt-age limitation on dropping long bus runs21, 28 and for the isolating disconnectors on series capacitor banks.
2.4 Loop currents
The study of loop current interruption is perhaps the most notable part of the work done by Andrews et al5 and assisted by Abetti10 and Gerngross11 but with reservation with respect to test conditions and conclusions drawn. The current range tested was 56 to 312 A with open circuit voltages across the disconnectors of 1 to 7.6 kV. Arcs as long as 12 m were recorded, the arcs being allowed to propagate freely to ultimate extinction. For the only instance in the work, the initial assumption as discussed in subsection 2.2 may have some (but very limited) validity. Loop current interruption is the commutation or transfer of the current from the one circuit incorporating the disconnector to a parallel circuit. The rate at which this will occur depends on the impedances in the loop and the rate at which the arc voltage builds up. The arc is thus being elongated by the disconnector blade motion and thermal and electromagnetic effects, all while the current is decreasing due to transfer to the parallel path. The easiest case of this is current transfer between buses within a station and the more difficult case is that of current transfer between transmission lines.
For loop currents up to 100 A, Andrews et al5 modified Eqn. (2.1) to read:
LPRl = 5.03 ZIS2 × 10-3 mm …(2.2)
by setting Uoc = ZIS × 10-3 (kV) where Z is the total loop impedance in ohms and IS is the initial current in the disconnector in amperes rms. Above 100 A, the limit of probable reach was set at a constant 5.03 mm/kV (Fig. 2.7) giving:
LPRl = 0.503 ZIS mm …(2.3)
As for the case of magnetizing current, the manner in which the loop current tests were performed is subject to question and this is discussed in Annex E.
F2 Internal BC Hydro report and private communications with various utilities.

Literature review
21
McNulty used Eqns. (2.2) and (2.3) to produce a guide for loop switching.29 The calculation assumes minimum clearances of 1 m in the system voltage range 23 kV to 69 kV and 1.83 m at 138 kV. No indication of the allowable reach is given and Fig. 2.9 shows permissible loop current switching at 138 kV based on McNulty’s calculation.
Shah and Ward describe the case of a failed loop switching attempt at 34.5 kV between distribution feeders.30 The authors offer a mathematical analysis of the event that has little or no merit as shown by Harner.31 The loop involved was complex including two transformers.
The CEA study9 also considered loop switching and found normalized arc reaches well below the limit of probable reach for this case as proposed by Andrews et al.5 This is shown in Fig. 2.10 below. Little detail is provided on how the tests were carried out but it would appear that a real loop circuit was simulated rather than opening the test disconnectors against a circuit recovery voltage. The test disconnectors showed contact melting at current above 200 A and damage due to contact burning (loss of material) at lower currents. In conclusion, the study recommends that loop switching be based on the results of Andrews et al but limited to maximum 100 A and further proposes that the permissible reach be up to 80% of the phase-to-phase clearance. This gives a permissible loop switching current (Ip) for a clearance C in mm as follows:
2p
3l ZI105.03LPR −×=
C8.0= and
ZC6.12Ip = …(2.4)
020406080
100120140160180200
0 50 100 150 200 250 300
Loop Impedance (Ohms)
Perm
issi
ble
Curr
ent (
A)
Fig. 2.9 Permissible loop current switching at 138 kV according to McNulty29

Section 2
22
Experience with loop switching at 765 kV is presented by Keane, Andrei and Halley.32 The requirement was to interrupt 600 A at a recovery voltage of at least 200 V which is well within the IEC requirement of 1600 A and 300 V for that system voltage.1 Tests were conducted on pantograph and vertical break type disconnectors using a synthetic circuit that produced the desired recovery voltage. Each disconnector was tested at 600 A and 220 V ten times with a maximum arcing time of 0.83 s and contact damage in the form of pitting was found on the contacts of both types (in the IREQ tests loss of contact material was found to start at around 200 A)9 and contact replacement was recommended after such a number of loop switching operations. The operating guideline for so-called local loop switching states in part that the operator is to reclose the switch if current interruption does not successfully occur by the time the disconnector contacts have parted approximately 0.3 m; and that he must be aware that small particles of molten metal may fall from the disconnector as a result of contact burning during the arcing period.
2.5 Free burning arcs in air
The basics of electric arcs has been described by Edels.45 The arc can be initiated by various means with that relevant to this study being the separation of current carrying contacts. The conducting gas between the contacts has a very high temperature (> 4000°K) and a high luminosity. The arc has three distinct regions as shown in Fig. 2.11 together with the voltage
Fig. 2.10 Comparison of loop switching test results between IREQ9 and
Andrews et al5 © CEA 1982

Literature review
23
profile along the arc. Note that the voltage profile shown is not to scale and the relative values of cathode-fall and anode-fall voltages (also known as the electrode voltage drops) versus the positive column voltage is dependent on the length of the arc. For very short arcs – and most arc studies have been related to such – the former voltages will dominate. Edels states that the electrode voltage drop is in the order of 10 V but Browne gives a range of 20 to 40 V for the electrode drop for arcs in air.46 For long arcs the voltage drop in the positive column dominates and per unit values given by various sources tend to be close: 12 V/cm for current greater than 50A;46 13 V/cm for fault currents;12 10 V/cm for currents greater than 100 A;43, 53 and 13.4 V/cm for currents greater than 68 A.44
Edels continues:45 “The conducting arc column acts as a normal electrical conductor in the presence of a magnetic field, although anomalous electromagnetic effects have been observed at the cathode. Because of its gaseous nature, the arc is easily influenced by gas flow. How-ever, the spatial stability of arcs is greatly dependent on the nature of the cathode material. Thus with typically refractory cathodes, e.g. carbon, molybdenum and tungsten, the cathode temperature is high and the arc is relatively stable. With low-melting-point cathodes, e.g. copper and mercury, the cathode termination is a highly mobile and concentrated spot which moves constantly over the cathode surface in an irregular fashion. These visual differences are the result of different cathode mechanisms and lead to the classification of arcs into two main types – refractory and non-refractory or cold-cathode arcs. Both arc types, however, have essentially the same column properties.” The consideration here is without doubt short arcs. This cathode material effect may well have value for the loop switching cases where the arcs are expected to be short, i.e. low loop impedances. Actual field observations tend to support this notion in that tungsten arcing horns performed better (arc duration shorter) than aluminum arcing horns at currents of several hundred amperes and a loop impedance of 0.5 ohm. The exact mechanism responsible for this performance is believed to be related to the electrode voltage drop.
Fig. 2.11 Arc regions and voltage profile

Section 2
24
Static electric arcs were first studied in the late 1800s and early 1900s by Ayrton,47 Steinmetz48 and others. Both Ayrton and Steinmetz developed arc equations but that of Ayrton is by far the better known:
IDLCBLAV +
++= …(2.5)
where V is the arc voltage, I is the arc current, L is the arc length and A, B, C and D are con-stants. The term A represents the sum of the cathode and anode voltage drops, BL the voltage drop in the positive column and (C + DL)/I the inverse characteristic of the arc. Nottingham49 later showed the Ayrton equation to be a limited approximation for arcs of constant length up to 15 mm and rewrote it to the form:
V = A + B/In …(2.6)
where A and B are constants dependent on arc length and electrode material and n dependent only on electrode material (n was shown to be directly proportional to the absolute tempera-ture of the boiling point of the anode material). However, for longer arc lengths, Nottingham showed that a variation of Eqn. (2.5) is applicable:
nIDLCBLAV +
++= …(2.7)
As proposed by Browne,46 if L is sufficiently large, then DL >> C and A is negligible compared to BL, and Eqn. (2.7) can be re-written as:
V = L(B +D/In) …(2.8)
For high currents, the term containing I becomes small and we can write:
V = LB …(2.9)
Eqn. (2.9) essentially states that the arc voltage per unit length is constant for high currents. As already noted above, experimental evidence supports this conclusion.
For sufficiently small currents, the term B in Eqn. (2.8) may be neglected giving:
DL
VIn
= …(2.10)
Eqn. (2.10) is of a form cited for fault and even lower current arcs in early literature and these equations are listed in Table 2.1. The equations, where appropriate, are discussed in the fol-lowing and their relevance or otherwise to this work in subsection 2.6.

Literature review
25
Table 2.1 Summary of published arc equations (V in volts, I in amperes and L in cm)
Source Year Arc equation Comment
Steinmetz48 1906 51L
VI 5.0
=
Nottingham49 1923 KL
VI 67.0
= K dependent on contact material
Ackermann12 1928 98L
VI 33.0
=
Eaton et al53 Tretjak et al43 1931 56
LVI 33.0
= Tests performed by Eaton et al and analyzed by Tretjak et al
Warrington50 1931 286L
VI 4.0
= L in this case is described as the distance between the electrodes and it is assumed that this is along the arc path (which the text appears to indicate)
Monseth and Robinson51 1935 104
LVI 5.0
= Cited by Andrews et al5
Abetti10 1948 43L
VI 4.0
= Loop switching case where V is the open circuit voltage and I the initial current
Gerngross11 1949 35L
VI 36.0
= Loop switching case where V is the open circuit voltage and I is the initial current
Browne46 1955 LVI = constant
Browne cited Nottingham’s paper49 but appears to prefer the Ayrton equation current exponent for the longer arc case
Maikopar59 1960 75L
VI 4.0p = Ip is the peak current
Unknown - PI
6012LV
+= Provided by Dr. K. Suzuki of Toshiba
Rieder60 1967 5.45L
VI 55.0
=
A number of investigators have studied long arcs in air principally in connection with fault current arcs or secondary arcs. Ackermann, who studied fault current arcs in range 120 A to 11,000 A, derived the equation shown in Table 2.1 by considering a balance between power input to the arc and power loss from the arc.12 Ackermann’s theory is that as long as the equation is satisfied, the arc is stable; however, if the arc voltage drops below the value satis-fying the equation – as at a critical length – then it becomes unstable and rapidly decays. This theory does not fit evolving arcs and really contradicts the fact that the arc voltage will increase as the current decays. The arc evolves due to increasing power input and then

Section 2
26
collapses when the power input is removed.42, 52 Apart from this discussion, Ackermann notes that the evolution of the arc is limited by partial arc collapses along its length.
Eaton, Peck and Dunham53 studied power arcs in the range 8 to 800 A peak, and the results in the range of 400 A peak below are of interest with respect to loop switching. Arc voltages and lengths were measured and the determined arc voltage gradient versus arc current points are plotted in Fig. 2.12.
Tretjak et al investigated AC arcs in air in a high voltage laboratory and then combined the results with those of Eaton et al to derive the mean equation given in Table 2.1 and shown in Fig. 2.12. The equation derived for the upper arc gradient limit shown in Fig. 2.12, which represents the condition of the critical arc length (LC), is:
84L
VI
C
33.0
= …(2.11)
Warrington50 conducted fault test with currents in the same range as Eaton et al.53 The purpose of the tests was to examine the influence of arc resistance on distance relays as was part of the reason for both Ackermann and Eaton et al performing their tests. The constant in Warrington’s equation (Table 2.1) in particular is five times higher than that of Tretjak et al. Warrington’s test points and equation are plotted in Fig. 2.13. Both Tretjak et al and Warrington (erroneously) treat critical length in the same manner as Ackermann, i.e. if the gradient drops below that given by equation, the arc decays and extinction follows.
0
5
10
15
20
25
30
35
40
0 100 200 300 400 500
Arc current (A peak)
Vol
tage
gra
dien
t (V/
cm)
C
Fig. 2.12 Arc voltage gradient versus arc current according to Eaton et al53 and
Tretjak et al43 (Lower curve: mean gradient; upper curve: critical gradient) © 1931 AIEE now IEEE and CIGRE

Literature review
27
Gross studied free burning arcs in the range 200 A to 400 A.52 Arc lengths were not deter-mined but recordings of the current and arc voltage were made. Fig. 2.14 shows a plot of these two quantities over the arcing time of 72 cycles at 50 Hz. The plot shows a gradual
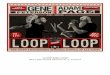
decrease in current as the arc grows in length and the arc voltage increases. After about 50 cycles, the decrease becomes more rapid as does the increase in arc voltage until extinc-tion occurs. Partial arc collapse is evident at 22, 40, 52 and 65 cycles. The arc resistance and arc power are shown in Fig. 2.15. The arc power shows a steady increase with the increasing arc resistance to a point where rapid decay occurs due to a sudden collapse of the power input. The arc thus continues to evolve as long as the power input is increasing and extin-guishes when the input is suddenly removed. This behaviour was also observed by Anjo as discussed later and in the loop switching tests described in section 5. The U-I characteristic is shown in Fig. 2.16. The time progression along the characteristic is from right to left. The loops at 80, 140 and 175 A are partial arc collapse incidents.
0102030405060708090
100
0 200 400 600 800 1000 1200
Arc current (A)
Volta
ge g
radi
ent (
V/c
m)
Fig. 2.13 Arc voltage gradient versus arc current according to Warrington50
© 1931 Electrical World
0
10
20
30
40
50
60
70
1 5 9 13 17 21 25 29 33 37 41 45 49 53 57 61 65 69 73
Time (cycles at 50 Hz)
Arc
volta
ge (k
V)
0
50
100
150
200
250
Arc
curr
ent (
A)
Arc voltage (kV)Arc current (A)
Fig. 2.14 Arc current and voltage according to Gross52
© 1941 Schweizer Archiv

Section 2
28
Strom studied arcs in the range of 68 A to 21.75 kA and lengths of about 3 mm to 1.2 m.44 In brief summary the study found average arc voltage gradients of 12.2 V/cm below 5000 A and 14.9 V/cm above 5000 A.
Secondary arcs – those following the primary fault current arcs in single phase tripping and reclosing schemes – are of interest particularly in terms of their extinction mechanism. The supply voltage that drives the secondary arc current is by electromagnetic and electrostatic induction from the sound phases and from parallel lines in the case of multi-circuit towers. This voltage cannot be considered a hard source but tends to produce a constant current even as the arc evolves in length.51, 59 Numerous system tests have shown that secondary arc currents are low in magnitude, generally less than 100 A,54-57 and can be symmetrical or asymmetrical.58 The extinction times of secondary arcs are usually less than one second, more often low enough to permit reclosing times of 0.33 seconds. This is demonstrated by Anjo who studied secondary arcs following primary fault currents of 8 kA.42 A plot of the arc
0
10
20
30
40
50
60
70
0 50 100 150 200 250
Arc current (A)
Arc
volta
ge (k
V)
Fig. 2.16 Arc U-I characteristic according to Gross52
© 1941 Schweizer Archiv
0200
400600
8001000
12001400
16001800
2000
1 5 9 13 17 21 25 29 33 37 41 45 49 53 57 61 65 69 73
Time (cycles at 50 Hz)
Arc
resi
stan
ce (o
hms)
0
500
1000
1500
2000
2500
3000
3500
4000
Arc
pow
er (k
W)
Arc resistanceArc power
Fig. 2.15 Arc resistance and arc power according to Gross52
© 1941 Schweizer Archiv

Literature review
29
voltage and current is shown in Fig. 2.17. Once the influence of the primary current has dis-appeared, the current is approximately 30 A up to the point of extinction, which takes place over a period of one cycle. Extinction occurs when the arc voltage reaches such a value that
the supply can no longer provide the increasing power necessary to sustain the arc. The arc power associated with the arc voltage and current of Fig. 2.17 is shown in Fig. 2.18. The power increases at a steady rate and takes a sudden jump just prior to extinction. The U-I
characteristic is shown in Fig. 2.19 and it is obvious that it differs greatly from the U-I char-acteristic of the free burning arcs of Gross (Fig. 2.16). Anjo measured arc lengths up to 9.3 m with the gradient rising to 6.8 kV/m at extinction.
Abetti10 and Gerngross11 studied the arc films taken by Andrews et al5 and determined the equations given in Table 2.1. Strangely neither work is cited by Andrews et al.
0
10
20
30
40
50
60
70
1 2 3 4 5 6 7 8 9 101112 131415 161718192021
Time (Cycles at 50 Hz)
Arc
vol
tage
(kV
)
0
10
20
30
40
50
60
70
Arc
cur
rent
(A)
Arc voltageArc current
Fig. 2.17 Secondary arc voltage and current42
© 1968 Electrical Engineering in Japan
0
500
1000
1500
2000
2500
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22
Time (cycles at 50 Hz)
Arc
pow
er (k
W)
Fig. 2.18 Arc power as derived from arc voltage and current in Fig. 2.1742
© 1968 Electrical Engineering in Japan

Section 2
30
2.6 Conclusions
In general, the study of disconnector’s current interrupting capability has not attracted a research interest appropriate to the lack of available knowledge on the subject. Apart from Neumann’s62 comprehensive study of air-break and GIS disconnector recovery voltages for the capacitive current and bus-transfer cases, no major research effort is evident.
The literature provides only a limited insight into the mechanism of current interruption in air. The principal work of the past is clearly that of Andrews et al in the 1940s and those who studied the subject later tended to adopt the arc reach approach of that early work. No consid-eration is thus given to the conditions that must be satisfied in order for the current to be interrupted and such consideration is the purpose of this thesis.
Past work on free-burning arcs in air is of interest for the case of loop switching. It is funda-mental that the arc will propagate as long as its power input is increasing. For loop switching
0
10
20
30
40
50
60
70
0 20 40 60 80
Arc current (A)
Arc
volta
ge (k
V)
Fig. 2.19 Secondary arc U-I characteristic42
© 1968 Electrical Engineering in Japan
0102030405060708090
100
0 100 200 300 400 500
Arc current (A)
Arc
vol
tage
gra
dien
t (V/
cm) Steinmetz
AckermannTretjakWarringtonMonseth & RobinsonAbettiGerngrossMaikoparSuzukiRieder
Fig. 2.20 Plot of arc equations from Table 2.1 for range 0 to 400 A

Literature review
31
this means that the arc voltage must increase faster than the current decreases due to commu-tation to the loop circuit. However, a point is inevitably reached where the rate of change of the power input goes to zero and the arc will collapse. The arc voltage is a function of the arc current and the arc length as described by the equations of Table 2.1. These equations are plotted in Fig. 2.20 and show a reasonable consistency except for that of Warrington. The plots show an almost constant voltage gradient for currents greater than 100 A. The range is anywhere from about 3 V/cm to 15 V/cm and it is perhaps no coincidence that power system study engineers often cite a fault arc voltage gradient of 10 V/cm as a “rule-of-thumb.” For currents below 100 A, the gradient increases with decrease in current and this range is expanded in Fig. 2.21 with Warrington’s equation excluded. The conclusion therefore is that the range below 100 A is more favourable for loop switching because current commutation promotes a higher arc voltage and in turn further current commutation and ultimate arc collapse.
0
10
20
30
40
50
60
0 20 40 60 80 100
Arc current (A)
Arc
vol
tage
gra
dien
t (V/
cm)
Steinmetz
Ackermann
Tretjak
Monseth & Robinson
Abetti
Gerngross
Maikopar
Suzuki
Rieder
Fig. 2.21 Plot of arc equations from Table 2.1 for range 0 to 100 A


Section 3
33
Interrupting transformer magnetizing current
3.1 Introduction
In the past transformer magnetizing currents were in a range up to 15 A (refer to Figs. 2.1 and 2.3). The value of energy has changed this and the low loss transformers of today have mag-netizing currents of less than 2 A, often less than 1 A at 100% excitation voltage. The current is non-sinusoidal with a high 3rd harmonic content. As such current zeros tend to occur prior to the crest of the applied voltage. The current is usually expressed in terms of an equivalent RMS value derived during the core loss measurement at the manufacturer’s plant.
Particularly in North America, this switching duty has been treated using the arc reach approach of Andrews et al.4, 5, 9 Reservation has already been expressed with respect to this approach and it is important to provide a broader perspective in this regard. Taking the arc reach approach at face value, it is possible to calculate limiting magnetizing current values based on arc reach. One such approach gives the following results (Table 3.1):6
Table 3.1 Allowable magnetizing current interrupting levels
System voltage kV rms
Magnetizing current A
15 27.5 72.5 145 253 550
4.1 2.9 2.7 2.3 2.1 1.4
The calculation had a conservative basis, the results appeared in practice to be reasonable and it was used as a basis for an IEEE guide.4 However, from a pragmatic engineering application perspective, the approach does not take into account blade position at the time of interruption. Observation at many actual unloaded transformer switching operations has shown that the arc reach is usually insignificant, in fact the arc showed very little tendency to rise often running down the opening blade. Furthermore, the current interruption is a repetitive break-restrike event (refer to Fig. 3.7(a)) that produces restriking overvoltages imposed on the transformer insulation and also results in power system inrush currents. To describe the switching duty in engineering terms is to state: to interrupt transformer magnetizing currents up to 2 A with a recovery voltage equal to the difference between the system applied voltage and the trans-former side recovery voltage before the disconnector blade reaches a limiting position. In dealing with this particular duty it is also necessary to consider the influence of restriking on the opening operation and on the transformer.

Section 3
34
3.2 Analysis
In Annex A it is shown that, after the interruption of magnetizing current, the transient recov-ery voltage takes the form of a highly damped oscillation. The degree of damping and the frequency of the oscillation is dependent on the level of excitation. However, the frequencies are low – generally less than 300 Hz – and it is reasonable to consider the TRV as having a (1-cosine) waveshape. A worst case scenario would thus be when the peak of the transformer side underswing coincides with the peak of the system applied voltage of opposite polarity. As shown in Annex A, this differential voltage across the disconnector can be taken as 1.3 pu. Vertical break disconnectors are considered in the analysis that follows, which analy-sis can be extended to other switch types by considering contact gap spacing.
The condition to be satisfied for the current to be interrupted is:
Ugap ≥ LU323.1 …(3.1)
where Ugap is the withstand voltage in kV peak and UL the system voltage in kV rms.
The minimum contact gap required to interrupt magnetizing current can be calculated with the following assumptions being made:
1. The thermal energy of the arc is not significant. This means that the arc shows little or no tendency to expand and restrikes do not necessarily occur in the previous arc channel.
2. The opening contact gap is viewed as a rod-rod type gap. This assumption will give a conservative result because the electrodes in question are of a round nature, i.e. a sphere on the blade end and corona rings on the jaw assembly.
Rod-rod gap power frequency sparkover values can be found in high-voltage testing stan-dards.33 The 60 Hz values (equally applicable at 50 Hz) are shown in Fig. 3.1 and are mean values with an error ±8%. Using Fig. 3.1 and known disconnector blade lengths, the required contact gap spacings are derived (Table 3.2).
Table 3.2 Minimum contact gap spacings for magnetizing current interruption
Contact gap mm
System voltage
kV
Disconnector blade length
mm
Recovery voltage kV peak Mean Mean + 8% Mean - 8%
72.5 950 77 150 162 138 145 1700 154 300 324 276 245 2600 260 500 540 460 362 3500 384 740 800 680 420 4000 445 860 930 790 550 4800 583 1130 1220 1040

Interrupting transformer magnetizing current
35
The results in Table 3.2 are shown schematically in Fig. 3.2. With some adjustment for disconnector geometry, it can be seen that the current should be interrupted at about a 15° blade angle. If a rule is set that the disconnector must interrupt the current before the blade reaches a 45° angle, then there would appear to be ample margin to achieve this. However, at higher current values (but not considering inrush currents for the moment) the thermal energy of the arc will become significant and thermal effects of the arc will also influence the point of current interruption. We suggest, therefore, that the interrupting capability of the discon-nector is the maximum current at which the length of the interrupting path as determined by geometry of the disconnector is the major controlling element in the interruption process. The same can be suggested for capacitive currents of the same order, but not for loop currents where the process is one of current commutation and not current interruption. This notion has equal relevance for capacitive currents and will be discussed in detail in that context.
Fig. 3.2
Rod-rod 60 Hz sparkover voltages
0
200
400
600
800
1000
1200
0 50 100 150 200 250
Gap spacing (cm)
60 H
z sp
arko
ver v
olta
ge
(kV
peak
)
Fig. 3.1 Rod-rod 60 Hz sparkover peak voltages34

Section 3
36
3.3 Restriking and its consequences
Because magnetizing current interruption is a repetitive break-and-restrike process, it will result in the generation of restriking overvoltages and the occurrence of inrush current. A case study of using an air break disconnector to switch an unloaded EHV transformer bank is described in Annex B and well illustrates this point. The issue to be addressed is the impact of the switching event on the transformer and the remedial measures that can be taken to eliminate or mitigate any negative consequences of restriking.
While transformers are commonly protected by metal oxide surge arresters, dielectric failure of some transformer types during unloaded switching have been reported.34, 35 The transform-ers were delta-connected on the high side and the failures were attributed to a ferroresonance effect. The failures are probably due to the combination of the transformer type and restriking in the disconnector. In fact, industry guidelines recommend against using disconnectors to switch unloaded delta-connected transformers.4 Such failures are the exception and this type of switching is widely practiced in North America often with the addition of a quick-break whip type device. With proper design and application (as discussed in the next subsection), these devices provide an essentially restrike-free magnetizing current interruption.19 Mitiga-tion of prestriking transients can only be achieved at the expense of a faster closing operation which may be mechanically undesirable.
3.4 Inrush currents
Apart from descriptions in textbooks,36 inrush current is generally viewed in terms of its influence on other systems such as protection rather than in itself. A literature search revealed only two references dating back to the early 1950s.37, 38 Inrush current is the initial rush of magnetizing current on energizing a transformer. This energization can be either a single event such as the closing or opening of a circuit breaker or a train of events with multiple prestriking or restriking during closing or opening of a transformer disconnector. When a transformer is switched out a residual flux is left in the core. On subsequent energizing of the transformer, the inrush current is determined by the magnitude and direction of the residual flux and the closing angle on the applied voltage. The inrush current is greatest when the transformer is energized at voltage zero following which the polarity of the voltage is such that the flux increases in the direction of the residual flux. The core is driven into saturation and the transformer draws a high current from the supply network. As the closing angle on the applied voltage moves away from the zero crossing, the magnitude of the inrush current becomes less and less. To avoid inrush current altogether, it would be necessary to know the status of the residual flux and to close at the voltage crest on appropriate polarity.41
Visual observation of arcs during unloaded transformer switching show the thin blue arc associated with the steady state magnetizing current and following some prestrikes or restrikes, short-lived bursts of inrush current. Fig. B4 in Annex B shows a typical trace of inrush current events during the described test. The inrush current is limited in both magni-tude and duration, a fact that has been observed by others15, 19, 22 and in other field tests (Fig. 3.3). The highest recorded value of inrush current was 1000 A as compared to a theoretically

Interrupting transformer magnetizing current
37
possible value of 3000 A. The reason for the limitation is that restriking will tend to occur close to the peak of the source voltage. A circuit breaker, with its fast closing speed, has the possibility of closing or prestriking close to a voltage zero crossing and producing a high inrush current (Fig. 3.4). Magnitude and duration of inrush current are evidently related and the question now is to consider the influence on the arc and the arcing time.
There are no direct measurements of arc voltage for this case and interpolation from other sources is necessary. The disconnector will not attempt to interrupt inrush current and the first conclusion is that the inrush current will prolong the arcing time by its duration. The inrush current arc and associated power input will leave a hot arc channel with a high ion density and the subsequent steady state current will follow this channel. The question to be addressed is: what is the thermal time constant of the hot channel? There is evidence to suggest that this time is very short indeed and is discussed below.
The duration of power arcs in air has been studied mainly in the context of high-speed three-pole and single-pole reclosing following fault current interruption. Early studies of high-speed three-pole reclosing by Sporn and Prince showed that de-energized times of 12 cycles were adequate to prevent arc reignition on reclosing following fault currents of less than 1 kA.40 Boisseau et al conducted high power laboratory tests on faults initiated across 69, 138 and 230 kV suspension insulator strings and found that for fault currents up to 10 kA, suc-cessful three-pole reclosing could be achieved within 6 to 10 cycles.41 This time was found to
Fig. 3.3 Switching unloaded 230 kV transformer with an air break disconnector
200
000
-200
kV
2
0
-2
SECONDS
0.1 SECONDS
KAMPS
0.2 0.3 0.4
0.1 0.2 0.3 0.4

Section 3
38
Fig.
3.4
Ene
rgiz
ing
a 23
0 kV
tran
sfor
mer
usi
ng a
n SF
6 typ
e ci
rcui
t bre
aker
Co
urte
sy o
f Bon
nevi
lle P
ower
Adm
inist
ratio
n

Interrupting transformer magnetizing current
39
be independent of a fault current duration in the range 1 to 14 cycles. In the case of single pole reclosing, the primary power arc is followed by a secondary arc thus prolonging the arc duration. Anjo et al studied this case for a primary power arc of 8 kA rms followed by secon-dary arcs in the range of 12 A to 30 A.42 The secondary arcs exhibit a minimum extinction time of about 12 cycles at 50 Hz. The contributors to this time are the past power input his-tory due to the power arc and the continuing and increasing power input due to the secondary current. Therefore it can be concluded that the former’s contribution timewise must be less than 12 cycles (0.24 s). In fact, the secondary arc current as derived from Figs. 3 and 10 of reference 42 indicates that the high current arc influence time is as short as 5 cycles (100 ms). This is shown in Fig. 3.5 where the secondary arc current of about 30 A is reached in the noted time.
The conclusion that can be drawn from these considerations is that the thermal constants associated with inrush currents in air – the magnitudes of which are certainly less than 8 kA and power inputs much less than for sinusoidal waveshapes of the same duration – is in the order of 100 ms or less.
Applying this logic to inrush current followed by steady state magnetizing current as described in Annex B, we can argue as follows. The arc length at current interruption was about 1 m. Based on the work of Tretjak43 and Strom,44 the arc voltage can be taken as 10 V/cm for the current levels in question (arc characteristics are discussed in detail in connection with loop switching). To simplify the calculation, we assume conservatively that the inrush current is sinusoidal at 1000 A peak and duration 0.3 seconds. The energy injected into the arc would then be 212 kJ which is considerably less than the energy of 3.2 MJ injected into the primary current in Anjo et al’s experiments. The conclusion is that the time constant of the inrush current arc is less than one cycle at 60 Hz and therefore the inrush current only contributes to the arcing time by its actual duration.
0
10
20
30
40
50
60
70
0 5 10 15 20 25
Time (cycles at 50 Hz)
Arc
curr
ent (
A)
Fig. 3.5 Arc current for experiment no. 512 in reference 39
© 1968 Electrical Engineering in Japan

Section 3
40
Analysis of the videos taken during the BC Hydro test described in Annex B provides com-pelling support for the inrush current influence scenario discussed above. With reference to Fig. B4, the sequence of events between the times 3 and 4 seconds is as follows:
1. Steady state magnetizing current 2. First major inrush current 3. Steady state magnetizing current 4. Minor inrush current 5. Steady state magnetizing current 6. Second major inrush current 7. Steady state magnetizing current 8. Current interruption
Images from the video records illustrating the sequence of events are shown in Fig. 3.6. The consistency of the steady state magnetizing current is clear evidence of the lack of influence of the inrush current on arc propagation beyond extending its duration.
3.5 Auxiliary interrupting devices
The application of auxiliary interrupting devices on disconnectors is common in North America. To interrupt magnetizing current, the only device in use is the quick-break whip type device available only at system voltages up to 245 kV. Such a device is shown in Fig. 1.6 and functions as follows. As the blade opens, the whip is restrained by the whip capture attachment which also functions as the fixed arcing horn (Fig. 1.7). When the blade reaches a predetermined position, the whip releases achieving a high tip velocity in the order of 0.5 to 0.6 m/cycle at 60 Hz. The whip has a damping mechanism to ensure that, once it passes the blade position, it does not swing back into the open gap. Two rules apply:
1. At the time that the whip releases the blade position must be such that the contact gaps shown in Fig. 3.2 are equalled or (preferably) exceeded.
2. The current must be interrupted before the whip reaches the blade position, otherwise its effect is negated and the arc will transfer to the blade.
By way of example, for a system voltage of 245 kV, the recovery voltage is 260 kV peak (Table 3.2). From Fig. 3.1 the slope of the rod-gap withstand characteristic is 0.5 kV peak/mm and a tip velocity of 0.5 m/cycle corresponds to 30 mm/ms, which together gives a rate of increase of withstand voltage of 15 kV peak/ms. The whip will achieve the required gap spacing in 17.3 ms. Because the current is interrupted at zero crossings, it is desirable to have a number of zero crossings while the whip is in motion. This can be arranged by setting the whip release point to where the blade position well exceeds the minimum contact gap position.

(a) Steady state magnetizing current
(b) Initiation of first major inrush current event
(c) First major inrush current event
(d) End of first major inrush event
Fig. 3.6 Video images: steady state magnetizing and inrush current sequence (continued) Courtesy of BC Hydro
Interrupting transformer m
agnetizing current
41

(e) Steady state magnetizing current
(f) Minor inrush current event
(g) End of minor inrush current event
(h) Steady state magnetizing current
Fig. 3.6 Video images: steady state magnetizing and inrush current sequence (continued) Courtesy of BC Hydro
42
Section 3

(i) Second major inrush current event
(j) End of second major inrush current event
(k) Steady state magnetizing current
(l) Current interruption
Fig. 3.6 Video images: steady state magnetizing and inrush current sequence Courtesy of BC Hydro
43
Interrupting transformer m
agnetizing current

Section 3
44
Observation of a well-designed whip type device in operation shows that it is possible to achieve a virtually restrike-free magnetizing current interruption.19 At most only an arc of a few mm in length is visible just as the whip tip releases from the capture attachment. Fig. 3.7(a) and (b) shows the interruption of magnetizing current for a 230 kV using a vertical break disconnector before and after the addition of a whip type device, respectively. Repeated restriking is evident in Fig. 3.7(a), but only very minor restriking is seen in Fig. 3.7(b) at the instant of current interruption, i.e. whip release.
(a) Without whip type device
(b) With whip type device
Fig. 3.7 Switching unloaded 230 kV transformer with vertical break disconnector without and with whip type device. Primary voltage is measured at the transformer
230 kV bushing.
kV
kV

Interrupting transformer magnetizing current
45
3.6 Conclusions
Conclusions with respect to the interruption of transformer magnetizing current with high-voltage air break disconnectors may be summarized as follows:
• Steady state magnetizing current interruption is dependent on achieving a minimum contact gap spacing provided that the current is low enough to avoid thermal effects.
• The influence of inrush current resulting from restriking is only in terms of prolong-ing the arc time by its duration plus a few cycles.
• Arc reach is generally not an issue because the condition for arc propagation – an increasing power input – is never met. Even inrush current and its power input contri-bution does not promote arc propagation.
• To minimize the effect of switching on the transformer, effort should be made to limit restriking and prestriking transients. For the former in the voltage range up to 230 kV, auxiliary devices can provide an essentially restrike-free current interruption. Pre-striking can only be limited by increasing the closing speed or by the addition of closing resistors.
• The results of Andrews et al have little (if any) relevance to unloaded high voltage transformer switching.


Section 4
47
Interrupting capacitive currents
4.1 Introduction
The capacitive currents in question are those associated with bus lengths with or without con-nected instrument transformers and short lines. The typical range of these currents is shown in Table 4.1. In practice, the allowable values of the capacitive currents to be interrupted do not exceed 5 A at any system voltage (Fig. 4.1).
Table 4.1 Capacitive current range
Capacitive current (A) at 72.5 kV 145 kV 245 kV 550 kV Equipment
type 50 Hz 60 Hz 50 Hz 60 Hz 50 Hz 60 Hz 50 Hz 60 Hz
CT* 0.025 0.03 0.033 0.04 0.033 0.04 0.1 0.12 CVT* - - 0.133 0.16 0.22 0.27 0.49 0.59 Busbars*/m 1.7 × 10-4 2 × 10-4 0.32 × 10-3 0.39 × 10-3 0.54 × 10-3 0.65 × 10-3 1.1 × 10-3 1.3 × 10-3 Lines/km 0.15 0.18 0.24 0.29 0.42 0.5 1.33 1.6
* For outdoor substations.
As for magnetizing current, the interruption process is a repetitive break-restrike event but often with a longer arcing duration due to the higher recovery voltage. Overvoltages produced can be a concern particularly for oil-filled paper insulated condenser type instru-ment transformers.
4.2 Analysis
This case can be analyzed in the same manner as for magnetizing currents and using the equivalent assumptions. To allow for some margin, the system voltage is taken to be at 1.1 pu and thus a recovery voltage peak of 2.2 pu is applicable. The condition to be satisfied for the current to be interrupted is:
0
1
2
3
4
5
6
0 200 400 600
System Voltage (kV)
Cur
rent
(A)
Utility 1Utility 2Utility 3Utility 4Manufacturer 1 IEEE Std (ref.4)600 kVA rule (ref. 9)Manufacturer 2
Fig. 4.1 Allowable capacitive current interruption from various sources

Section 4
48
Ugap ≥ 2.2 32 UL …(4.1)
where Ugap is the gap withstand voltage in kV peak and UL the system voltage in kV rms.
The results of the calculation are shown in Table 4.2 and schematically in Fig. 4.2. Current interruption by a 45° blade angle would appear to be certain.
Table 4.2 Minimum contract gap spacings for capacitive current interruption
Contact gap mm
System voltage
kV
Disconnector blade length
mm
Recovery voltage kV peak Mean Mean + 8% Mean - 8%
72.5 950 130 252 272 232 145 1700 260 504 544 464 245 2600 440 854 922 786 362 3500 650 1260 1360 1159 420 4000 755 1465 1582 1348 550 4800 988 1917 2070 1765
The issues to be considered in this section are:
• the level of capacitive current that can be interrupted preferably before the disconnec-tor blade reaches the 45° angle position;
• the process of current interruption; • external dependencies.
Fig. 4.2 Minimum blade angles for capacitive current interruption for vertical
break disconnector

Interrupting capacitive currents
49
4.3 Auxiliary interrupting devices
Whip-type devices applied to interrupt capacitive currents are discussed in Annex D.
4.4 Field experience
Records of vertical break disconnector successful and failed current interruption attempts are plotted in Fig. 4.3. In this context, successful means that the current was interrupted before the blade reached the fully open position and failed that the arc persisted after the blade
reached the fully open position. In Fig. 4.3, the points from Fig. 4.1 are also shown but are now masked (appear in grey).
A linear regression of the success points falls approximately along the upper limit of Fig. 4.1 points. The regression also shows a reasonable agreement with a linear regression of the 600 kVA rule points (Fig. 4.4). The equations for both are:
Isuccess = -0.0064U + 3.7 …(4.2)
and
I600 kVA = -0.008U + 4.1 …(4.3)
where I is the current in A and U the system voltage in kV.
0
1
2
3
4
5
6
7
0 100 200 300 400 500 600
System Voltage (kV)
Cur
rent
(A)
Utility 1
Utility 2
Utility 3
Utility 4
Manufacturer 1
IEEE Std (ref.4)
600 kVA rule (ref. 9)
Manufacturer 2
DisconnectorsuccessesDisconnector failures
Linear (Disconnectorsuccesses)Linear (Disconnectorfailures)
Fig. 4.3 Vertical break disconnector capacitive current interruption successes and
failures

Section 4
50
A visual perspective of capacitive current interruption is shown in Fig. 4.5 − a 115 kV disconnector switching out a 10 km long line charging current 2.4 A. The arc is irregular, exhibits a certain thermal effect rising upwards and is prolonged by energy injection due to restriking first in the far phase, then the centre phase and finally the near phase. Interruption occurs just prior to the fully open position. Reach is not significant and is better described by the approach of Barrett and GreenF3 than that of Andrews et al. Barrett and Green viewed the arc as being contained within a cylinder whose axis is a line drawn between arc end-points and whose radius is a line perpendicular to the axis to the extreme point of the arc. Fig. D2 in Annex D shows a much more intense arc with greater thermal effect for an increase in current of only about 1 A to 3.3 A. Clearly at some current level below 2.4 A, the thermal effect starts to be significant and this notion and the role of restrikes is explored in the following subsections.
4.5 Video record review
Observation of capacitive current arcs in air shows that they can be classified into two types as follows:
• The first type occurs for current magnitudes below a certain level. At this level, the arc does not thermally support a sustainable arc channel and each restrike establishes a new path between the electrodes. No exact study has been made of applicable current levels but experience indicates that this arc type occurs at currents below 1 A.
F3 J.S. Barrett and M.A. Green, “230 kV Grounding Devices − Inductive and Capacitive Arcs.” Ontario Hydro Technologies (now Kinectrics Inc.), Report No. A-G-94-19-H, March 1994.
0
1
2
3
4
5
6
7
0 200 400 600
System voltage (kV)
Cur
rent
(A)
600 kVA rule
Disconnectorsuccesses
Disconnectorfailures
Linear (600 kVArule)
Linear(Disconnectorsuccesses)Linear(Disconnectorfailures)
Fig. 4.4 Linear regressions of vertical break disconnector current
interruption successes and failures and the 600 kVA rule

Fig. 4.5 115 kV vertical break disconnector interrupting line charging current of 2.4 A (continued) Courtesy of Bonneville Power Administration 51
Interrupting capacitive currents

Restrike far phase
Restrike centre phase
Restrike near phase: note arc colour change on
centre phase indicative of arc collapse
Current interruption: note hot gas remnants near
blade tip on centre phase
Fig. 4.5 115 kV vertical break disconnector interrupting line charging current of 2.4 A Courtesy of Bonneville Power Administration
52
Section 4

Interrupting capacitive currents
53
• The second type occurs for current magnitudes of about 1 A or more. In this case, the arc thermally supports a sustainable arc channel and each restrike follows the estab-lished arc channel. The current continues to break-and-restrike until such time as the channel becomes too long and/or cold for a restrike to occur or that the energy injected by a restrike is not sufficient to force another loop of power frequency current.
For the first type of arc, current interruption will occur around the minimum blade angles shown in Fig. 4.2. For the second type the effect of restriking is to delay current interruption beyond the above-noted blade angles. Additionally, there is evidence to suggest that the arcing time is determined, not only by the status of the previous arc channel and its capability to support restriking, but also by the relative source (CS) and load side capacitances (CL).F4 In the test at 2 A described in the KEMA report, the longest arcing times were found to occur when CS/CL < 1 and the disconnector failed to interrupt the current when CS/CL = 0.1. Knobloch66, 77 and Neumann62 noted a similar dependency with respect to restriking over-voltages. The influence of CS/CL is discussed in detail in subsection 4.6 below.
Fig. 4.6 shows an example of the first type of arc. The current level is approximately 0.5 A and the arc can be seen to literally dance around the electrodes with no fixed pattern whatso-ever.
Fig. 4.7 illustrates the second type of arc. This example is of a 115 kV centre break discon-nector interrupting a line charging current of 1.8 A. The disconnector is equipped with a whip-type device but the whip is too short and releases early transferring the current to the main contacts. When a longer whip was substituted, the device cleared without a visible arc. The arcing time was 1.6 seconds. The arcs appear to evolve to a certain length and are sustained by a balance − perhaps tenuous − between the power input and the power loss and further injections of energy due to restrikes. The restriking energy does not promote propaga-tion but, similar to inrush current for the magnetizing current case, prolongs the arcing time by at least its duration of injection plus a number of cycles thereafter.
In another line dropping test at 115 kV and 4.6 A, a similar type of disconnector cleared in 2.3 seconds but only after reaching the fully open position. This disconnector was also equipped with a whip-type device. However, the adjustment of the device was not correct and in this case the arc gradually ran down the whip as can be seen in Fig. 4.8. The weather at the time was inclement with rain and wind. The arc propagates horizontally and whether this is related to the moving arc on the whip or the wind is not obvious. The arc again exhibits a limiting length and in fact propagates several times to this length in a series of restrikes and intermittent partial arc collapses. This length is exceeded only in the final image Fig. 4.8(p), at which length the power loss is greater than the power input and total collapse is inevitable provided that no partial arc collapse or restrike occurs in the meantime to sustain it.
F4 KEMA Report of Performance No. 237-86: Development of a test circuit for small capacitive current interruption by disconnectors. August 1987.

Fig. 4.6 500 kV vertical break disconnector interrupting approximately 0.5 A of busbar and series capacitor bank platform charging current Courtesy of Bonneville Power Administration
54
Section 4

Interrupting capacitive currents
55
(a) Whip breaks contact on near phase
(b) Arc transfers to the main contacts
(c) Initial steady state arcs
(d) Arcs migrate upwards and become more
convoluted; note similarity between arcs in centre and far phases
Fig. 4.7 115 kV centre break disconnector interrupting 1.8 A of line charging current (continued) Courtesy of Puget Sound Energy

Section 4
56
(e) Restrikes in centre phase
(f) Partial arc collapse in near phase; restrike in
centre phase clearly evident
(g) Partial arc collapse in centre phase; effect
of restrike has waned
(h) Arcs appear to be similar in length; restrike
in far phase
Fig. 4.7 115 kV centre break disconnector interrupting 1.8 A of line charging current (continued) Courtesy of Puget Sound Energy

Interrupting capacitive currents
57
(i) Restrikes in centre and far phases
(j) Partial arc collapse in near phase;
approaches total arc collapse in far phase
(k) Partial arc collapse in middle phase; far
phase has cleared
(l) Restrikes near and middle phases
Fig. 4.7 115 kV centre break disconnector interrupting 1.8 A of line charging current (continued) Courtesy of Puget Sound Energy

Section 4
58
(m) Restrike in near phase
(n) Restrike wanes in near phase
(o) Centre phase clears; near phase approaches
total arc collapse
(p) Near phase clears; note hot gas remnants
(see (o) also) at former arc high and presumably hottest points
Fig. 4.7 115 kV centre break disconnector interrupting 1.8 A of line charging current Courtesy of Puget Sound Energy

(a) Contact parting
(b) Steady state current; note that whip movement
results in the double arc image
(c) Arc still on whip propagating horizontally
(d) Partial arc collapse; note hot gas remnants
Fig. 4.8 115 kV centre break disconnector interrupting a line charging current of 4.6 A (continued) Courtesy of Puget Sound Energy59
Interrupting capacitive currents

(e) First restrike
(f) Second restrike
(g) Third restrike
(h) On verge of total arc collapse but see following
image (i)
Fig. 4.8 115 kV centre break disconnector interrupting a line charging current of 4.6 A (continued) Courtesy of Puget Sound Energy
60
Section 4

(i) Partial arc collapse and recovery
(j) Fourth restrike
(k) Fifth restrike
(l) Steady state current and partial arc collapse
Fig. 4.8 115 kV centre break disconnector interrupting a line charging current of 4.6 A (continued) Courtesy of Puget Sound Energy61
Interrupting capacitive currents

(m) Sixth restrike
(n) Seventh restrike; arc has now left the whip and is
on the main contacts
(o) Eighth restrike
(p) Final total arc collapse and current interruption
Fig. 4.8 115 kV centre break disconnector interrupting a line charging current of 4.6 A Courtesy of Puget Sound Energy
62
Section 4

Interrupting capacitive currents
63
4.6 Capacitive current switching tests 2003
The apparent dependence of successful capacitive current switching on the source and load side capacitances has been noted earlier. Knobloch66, 67 and Neumann62 made a similar obser-vation with respect to the overvoltages generated during capacitive current switching with a pantograph type disconnector. To further investigate this matter, a series of tests were con-ducted at the KEMA High Power Laboratory in November 2003.72
The tests were performed on a 300 kV centre-break type disconnector over a current range of 0.23 A to 2.3 A. The values of CS and CL were varied as shown in Table 4.3 using the test circuit of Fig. 4.9
Table 4.3 300 kV disconnector test CS and CL combinations
CL (nF) CS (nF)
4.3 10.7 19.3 38.6 40 1.5 X X X X 6 X X X 20 X X 60 X X X X 100 X
A total number of 57 test shots were carried out at 171.5 kV to 173 kV source voltage and various combinations of current, CS and CL. The results are discussed in terms of the gener-ated load side overvoltages and the arc duration.
The dependence of the load side overvoltages on CS is evident in Fig. 4.10. There is approxi-mately a 1 pu difference in magnitude between CS values of 1.5 nF and 60 nF. Fig. 4.11 shows the dependence of the overvoltages on the ratio CS/CL. The highest overvoltage values occur for CS/CL < 1. These results support the conclusions of Knobloch66 and Neumann62 but noting that higher overvoltages were obtained in the KEMA tests. The overvoltages have no dependence on the current magnitude (refer to Eqn. (4.7)).
Fig. 4.9 Basic test circuit (TRV elements and measuring devices not
shown)

Section 4
64
1
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
0.0 0.5 1.0 1.5 2.0 2.5
Capacitive current (A)
Load
sid
e ov
ervo
ltage
(pu)
1.5 nF6 nF20 nF60 nF100 nFLinear (1.5 nF)Linear (60 nF)
Fig. 4.10 Load side overvoltages versus switched capacitive current
with CS as parameter
1
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
0 1 2 3 4 5 6
CS/CL
Load
sid
e ov
ervo
ltage
(pu)
0.23 to 0.6A1 to 1.4A2.1 to 2.3A
Fig. 4.11 Load side overvoltages versus CS/CL with switched
capacitive current as parameter
1000
1200
1400
1600
1800
2000
2200
0 0.5 1 1.5 2 2.5
Capacitive current (A)
Arc
dur
atio
n (m
s)
1.5 nF6 nF20 nF60 nF100 nFLinear (1.5 nF)Linear (60 nF)
Fig. 4.12 Arc duration versus switched capacitive current with CS
as parameter

Interrupting capacitive currents
65
1000
1200
1400
1600
1800
2000
2200
0 1 2 3 4 5 6
CS/CL
Arc
dura
tion
(ms) 0.23 to 0.6A
1 to 1.4A2.1 to 2.3A
Fig. 4.13 Arc duration versus CS/CL with switch capacitive current as
parameter
Arc duration shows a similar dependency on CS and on CS/CL as shown in Figs. 4.12 and 4.13, respectively. The worst cases again occur for the lowest CS values and CS/CL < 1.
An interesting observation (also by Knobloch66) during the tests was that the arc exhibited two distinct modes as shown in Fig. 4.14. In the first erratic mode, the arc evolves erratically and has a length several times the blade tip spacing (Fig. 4.14 upper image). This mode occurs for CS values less than 60 nF and CS/CL < 1 and is associated with higher overvoltages and longer arc durations. The stiff mode is a contraction from the erratic mode to a form of more or less a straight path between the contacts (Fig. 4.14 lower image). This mode occurs
Fig. 4.14 Capacitive current arc just before extinction Upper image: Erratic arc 2 A, CS/CL = 0.04 (2.43 m tip spacing) Lower image: Stiff arc 1 A, CS/CL = 3.1 (1.22 m tip spacing)

Section 4
66
for CS values of 60 nF or greater, CS/CL > 1 and lower values of capacitive current. This mode results in the lowest overvoltages and shortest arc durations as shown in Figs. 4.15 and 4.16.
The phenomena associated with this switching duty, as described above, can be understood by considering high frequency measurements of the arc current and the source and load side voltages. Fig. 4.17 shows oscillograms for two significantly different values of CS/CL. A capacitive current switching arc is a succession of interruptions and restrike. On restriking the voltages on CS and CL become equalized through a high frequency discharge in the loop formed by CS, CL and the disconnector (refer to Fig. 4.9). For the upper oscillogram of Fig. 4.17 with CS/CL = 2.5, this discharge is shown as an inset at 28 kHz. The equalization voltage is dependent on the value of CS/CL and the overvoltage results from the subsequent transition between this voltage and the source voltage. If the difference between the two voltages is great, then the overvoltage will be high (lower oscillogram of Fig. 4.17) and vice versa (upper oscillogram of Fig. 4.17).
1000
1200
1400
1600
1800
2000
2200
0 1 2 3 4 5 6
CS/CL
Arc
dura
tion
(ms) 0.23 to 0.6A
1 to 1.4A2.1 to 2.3AStiff arc
Fig. 4.16 Arc duration versus CS/CL for stiff arc mode (shaded points
relate to the erratic arc mode)
1
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
0 1 2 3 4 5 6
CS/CL
Load
sid
e ov
erva
ltage
(pu)
0.23 to 0.6A1 to 1.4A2.1 to 2.3AStiff arc
Fig. 4.15 Load side overvoltages versus CS/CL for stiff arc mode
(shaded points relate to the erratic arc mode)

Interrupting capacitive currents
67
6 7 0 6 7 5 6 8 0 6 8 5 6 9 0 6 9 5 7 0 0
- 2 . 5
- 2
- 1 . 5
- 1
- 0 . 5
0
0 . 5
1
1 . 5
2
2 . 5
3
arcingrestrikes
load voltage
source voltage
current
550 Hz
CS/CL = 2.5
6 7 2 . 4 6 7 2 . 4 5 6 7 2 . 5 6 7 2 . 5 5 6 7 2 . 6
- 0 . 6
- 0 . 4
- 0 . 2
0
0 . 2
0 . 4
0 . 6
0 . 8 voltages: 0.2 pu/div time: 50 us/div
28 kHz
1 3 9 0 1 3 9 5 1 4 0 0 1 4 0 5 1 4 1 0 1 4 1 5 1 4 2 0
- 2 . 5
- 2
- 1 . 5
- 1
- 0 . 5
0
0 . 5
1
1 . 5
2
2 . 5
3
Fig. 4.17 Test oscillograms for 2 A capacitive current and CS/CL values of 0.04 and 2.5
voltages: 0.5 pu/div (= 122 kV/div); current: 50 A/div; time: 5 ms/div
CS/CL = 0.04current
load voltage
source voltage
1 kHz
arcing 2.3 pu

Section 4
68
The equalization voltage can be calculated by considering the circuit in Fig. 4.9. Taking the voltages on the source and load side capacitances as US and UL, the corresponding charges are:
QS = USCS
QL = -ULCL
and Qtotal = USCS + (-ULCL)
After restriking and charge redistribution, the voltages equalize at UE:
LS
totalE CC
QU
+=
or LS
LLSSE CC
CUCUU
+−
= …(4.4)
Prior to restriking the voltage across the disconnector UD is:
UD = US + UL
and substituting in Eqn. (4.4) for UL
( )LS
SDLSSE CC
UUCCUU
+−−
=
or LS
DSE C/C1
UUU
+−= …(4.5)
The peak overvoltage value to ground UOV is given by:
( )ESSOV UUUU −β+= …(4.6)
where β is the damping factor.
Substituting from Eqn. (4.5):
+
β+=LS
DSOV C/C1
UUU …(4.7)

Interrupting capacitive currents
69
The dependence of the overvoltage values on CS and CS/CL can now be explained:
• CS > CL: the term (1 + CS/CL) is large and UOV will consequently be low (Fig. 4.17, upper oscillogram).
• CS < CL: the term (1 + CS/CL) is low and UOV will consequently be high (Fig. 4.17, lower oscillogram).
If CS >> CL, then UOV can theoretically reach 3 pu (no damping with β = 1). However, some damping is always present as is evident in Fig. 4.11.
CS and CS/CL also influence the arc duration (Figs. 4.12 and 4.13). For large CS/CL the tran-sient arcing currents are low thus creating conditions for a high restriking repetition rate and ultimate current interruption (Fig. 4.17, upper oscillogram). The arcing mode tends to be of the stiff variety (Figs. 4.14, lower image and 4.16). For small CS/CL as in Fig. 4.17 lower oscillogram, the transient currents are higher (as is the energy injected into the arc) and can-not be easily interrupted thus creating conditions for one restrike per cycle and for continuous arcing of longer duration.
Based on the above analysis and the discussion in subsection 4.5, we can conclude that the longest arc durations will occur when CS/CL < 1 and the capacitive current is of a magnitude ≥ 1 A such as to produce arc channel remnants thermally conducive to restriking. With reference to Fig. 4.13, Fig. 4.18 illustrates this conclusion. The arc durations increase progressively as the current increases from ≤ 0.57 A, through 1 A (where thermal effects are starting to exert influence) to greater than 2 A (where thermal effects are definitely exerting an influence).
The frequency of the overvoltage transient following voltage equalization is determined by the source and CS and CL in parallel. For the upper and lower case of Fig. 4.17, the above frequencies are 550 Hz and 1 kHz, respectively.
1000
1200
1400
1600
1800
2000
2200
0 0.2 0.4 0.6 0.8 1 1.2
CS/CL
Arc
dur
atio
n (m
s) 0.23 to 0.57A1A2.1 to 2.25A
Fig. 4.18 Arc duration versus CS/CL (shaded points relate to currents
of 1 A or less)

Section 4
70
Finally, there is also the matter of arc reach. The angular turning velocity of the disconnector blades is 40 degrees/second with arcing being initiated at 8 degrees. The 45 degree position (half-open) is reached 930 ms after arc initiation. The arcs for all test cases extinguished for blade angles greater than 45 degrees but always before the 90 degree position where the maximum blade tip spacing of 2.8 is reached. Despite this the arc reach in a horizontal or vertical direction was small. For the test case in the upper image of Fig. 4.14 with an arc duration of 2040 ms, the arc reach is approximately half the blade tip spacing. This implies that arc reach for capacitive current switching is much less an issue in terms of risk for contact with adjacent phases or structures than it is for loop switching.
4.7 Conclusions
The conclusions with respect to the interruption of capacitive currents is based on field observations and laboratory tests:
• The arc will exhibit a number of arcing modes dependent on the magnitude of the current and the source (CS) and load (CL) side capacitances.
• For currents of 1 A or less, thermal effects are not significant and the arc duration is dependent mainly on achieving the minimum disconnector gap spacing to withstand the recovery voltage and the source and load side capacitances.
• For currents greater than 1 A, thermal effects become significant and the arc duration is dependent on the current magnitude in addition to achieving a minimum contact gap spacing and the source and load side capacitances.
• The longest arc durations at any current magnitude occur when CS/CL < 1.
• The overvoltages associated with capacitive current switching are independent of the current magnitude and the highest values occur when CS/CL < 1.
• The 600 kVA rule relates only to current magnitude and any merit that it may have is coincidental rather than factual.
• Whip type auxiliary interrupting devices may provide benefit provided that CS/CL > 1. Caution should be exercised in applications where CS/CL < 1.

Section 5
71
Loop switching
5.1 Introduction
Loop switching is the one type of current interruption under consideration where the arc always plays a dominant role. The interruption process is one of commutating the current from the disconnector path to a parallel path. The range of application is from up to 1600 A between busbars within a substation down to tens to hundreds of ampere between transmission lines and between distribution feeders. The industry practice is to only attempt loop switching with disconnectors as described above. For loops involving cable circuits or transformation, circuit breakers are used.
The equivalent circuit for loop switching circuit analysis is shown in Fig. 5.1. As will be shown in this section, the initial current IS in the disconnector will go to zero when the arc voltage approaches IS(XL + XS) and the open circuit voltage will be XL(IS + IL). Actual loop switching traces are shown in Figs. 5.19 and 5.20.
Fig. 5.1 Equivalent circuit for loop switching
The condition for successful loop switching is therefore that the above arc voltage in the dis-connector must be reached by a certain limiting point in the blade travel. For purposes of this study, the limit is taken as a 45° angle on a vertical break disconnector.
5.2 Loop switching tests 1999–2000
A series of loop switching tests were run on 230 kV and 25 kV disconnectors at Powertech Laboratories Inc. in British Columbia, Canada during the period November 1999 to September 2000. The test circuit was essentially as shown in Fig. 5.1 with the voltage source arranged to be constant current, i.e. the total current IT is unchanged after the test disconnec-tor interrupts the initial current IS. A total of 205 test shots were conducted, 144 shots on the 230 kV disconnector and 61 shots on the 25 kV disconnector.
Based on the circuit shown in Fig. 5.1 the parameters to be considered are:
• the disconnector initial current IS • the arc voltage ua • the series and parallel impedances XS and XL; (XS + XL) = loop impedance • and the recovery voltage across the disconnector XLIT
iL
iT
iS ua

Section 5
72
We can write:
dtdiL L
L aS
S udtdi
L += …(5.1)
and
iT tsinIT ω=∧
LS ii +=
where LL = XL/ω and LS = XS/ω.
Eqn (5.1) then becomes:
( )a
SS
STL u
dtdi
Ldt
iidL +=
−
and differentiating the left term:
( ) aS
LSTL udtdi
LLtcosIL ++=ωω …(5.2)
and we can further write:
ua = f(iS) …(5.3)
The quantities recorded in the tests covered the above parameters and in addition the arcing time ta. This enables some simplification of the analysis of the test results because ta is the time it takes (for a given value of IS) to build up an arc voltage approaching to IS(XL + XS), which time is dependent on the values of XL and XS. While Andrews et al hypothesized a relationship only between IS and the loop impedance (XS + XL), it is more appropriate to investigate a possible relationship between IS, (XS + XL) and ta if a limit on interrupting time is to be set. The arc is also examined from the video records in order to provide a perspective on its reach behaviour in space and time and its visual characteristics. The electrical charac-teristics of the arcs are examined in subsection 5.3.
5.2.1 Initial current, loop impedance and arcing time
In the experiments conducted by Andrews et al arcing time was not a consideration. Persis-tence of the arc was viewed as acceptable – even after the test disconnector was fully open – provided that its reach was not excessive. This approach defies the prudent notion that the current should be interrupted while the moving contact (the disconnector blade) is still in motion (successful current interruption is defined in this way). In addition, such a scenario would be unacceptable on manually operated disconnectors. The test data for the 230 kV and 25 kV disconnectors was therefore analyzed to determine the relationship between the initial current, the loop impedance and the arcing time.

Loop switching
73
Fig. 5.2 shows the test points giving successful current interruption for the 230 kV discon-nector for all tests except those of November 1999. The latter results are treated separately in Annex F because that test was conducted under very windy conditions in contrast to the fair
weather conditions during the other tests. While the scatter is wide, there is an apparent negative sloping trend between the two quantities. This trend becomes more obvious when the results are segregated by arcing time as shown in Fig. 5.3.
0
50
100
150
200
0 50 100 150 200
Loop impedance (ohms)
Initi
al c
urre
nt (A
)
Fig. 5.2 Successful current interruption test points for 230 kV
disconnector
0
50
100
150
200
0 50 100 150 200
Loop impedance (ohms)
Initi
al c
urre
nt (A
)
<1000ms
1000-1500ms
>1500ms
Fig. 5.3 230 kV disconnector successful current interruption test
points with arcing time as parameter

Section 5
74
Similar plots for the 25 kV disconnector tests are shown in Figs. 5.4 and 5.5. It can be seen that the pattern is similar to that for the 230 kV disconnector. The results of the tests on both disconnectors are compared in Fig. 5.6. Assuming current interruption by the same blade angle, the 25 kV disconnector will have a lower capability than the 230 kV disconnector.
Examination of Figs. 5.3 and 5.5 shows that it should be possible to derive operating limits to some rule using statistical analysis. The rule proposed for this analysis is that the switch shall interrupt the current within a maximum arcing time of 1 second which corresponds to about a 30° blade angle. The justification for this rule is as follows:
0
50
100
150
200
0 50 100 150 200
Loop impedance (ohms)
Initi
al c
urre
nt (A
)
Fig. 5.4 Successful current interruption test points for 25 kV
disconnector
0
50
100
150
200
0 50 100 150 200
Loop impedance (ohms)
Initi
al c
urre
nt (A
)
<1000ms
1000-1500ms
>1500ms
Fig. 5.5 25 kV disconnector successful current interruption test points
with arcing time as parameter

Loop switching
75
• It assures current interruption while the blade is in motion.
• It provides a degree of arc control in that the arc is extinguished before it has an opportunity to propagate.
• It limits any possible phase-to-phase interaction which is important given that the test-ing was done on a single phase basis.
• It should avoid any negative influence by the weather given that arc lengths are short.
As noted earlier a major criticism of the work of Andrews et al was the failure to relate current interruption to blade position or arcing time. The results in the foregoing figures sug-gest a power relationship between the initial current in the disconnector and the total loop impedance. We can therefore write:
BtS AXI −=
where A and B are constants and LSt XXX += .
Linearizing the above equation gives:
ln IS = −B ln Xt + ln A
which is of the form y = mx + c and a linear regression can be performed to derive the values of A and B. The results of this regression analysis for the 230 kV disconnector by arcing time are shown in Fig. 5.7 giving the following equations:
0
50
100
150
200
0 50 100 150 200
Loop impedance (ohms)
Initi
al c
urre
nt (A
)
25kV <1000ms25kV 1000-1500ms25kV >1500ms230kV <1000ms230kV 1000-1500ms230kV >1500ms
Fig. 5.6 25 kV and 230 kV disconnector successful current
interruption test points with arcing time as parameter

Section 5
76
IS 1500+ = 620 38.0tX− …(5.4)
IS 1000−1500 = 340 35.0tX− …(5.5)
IS 500−1000 = 150 32.0tX− …(5.6)
The next step is to calculate the standard deviation of the regression (also known as the stan-dard error of the estimate) and conservatively to set the interrupting limits at two (2) standard deviations below the mean. The results of this calculation are shown in Fig. 5.8.
Fig. 5.8 can be read as follows. Below the middle line there is a 2% probability only that the arcing time will be as high as 1 to 1.5 seconds. Between the middle and upper lines there is a
0
50
100
150
200
0 50 100 150 200
Loop impedance (ohms)
Initi
al c
urre
nt (A
)
500-1000ms1000-1500ms>1500msPower (1000-1500ms)Power (>1500ms)Power (500-1000ms)
Fig. 5.7 Regression analysis for 230 kV disconnector test results with
arcing time as parameter
0
50
100
150
200
0 50 100 150 200
Loop impedance (ohms)
Initi
al c
urre
nt (A
)
<1000ms1000-1500ms>1500ms<1000ms, -2SD1000-1500ms, -2SD>1500ms, -2SD
Fig. 5.8 Mean minus two (2) standard deviation regression analysis for
230 kV disconnector results with arcing time as parameter

Loop switching
77
2% probability only that the arcing time will exceed 1.5 seconds. Above the upper line there is a 98% probability that the arcing time will exceed 1.5 seconds. The equations for the middle and upper lines are:
IS 2% 1000-1500+ = 210 35.0tX− …(5.7)
IS 98% 1500+ = 340 38.0tX− …(5.8)
This analysis does not stand alone because arc reach, as described in the next subsection, is a major consideration.
5.2.2 Arc video record analysis
A. Video camera arrangement
Two digital video cameras were used to record the progression of the arc and its movement relative to the test 230 kV disconnector. The cameras were placed at jaw assembly height, the first facing along the longitudinal axis of the closed disconnector and the second facing the jaw assembly with a line of sight at right angles to that of the first camera. This is in contrast to the camera arrangement used by Andrews et al who also used two cameras with lines of sight at right angles to one another but at oblique angles to the longitudinal axis of the test disconnector. In addition, both cameras were placed on the same side of the test disconnector.
B. General visual observations
The arcs can be said to exhibit an expected randomness but with certain patterns related to the current level and the arcing time. However, at times the arc exhibits aberrant behaviour for reasons discussed later. In the following, still picture images from the videos are used to illustrate arc behaviour.
At low current the arc has the appearance of a reasonably well defined conduction path. As the current increases, the appearance tends towards that of a poorly defined flame. This is illustrated in Figs. C1 to C8 in Annex C. Note also that, as the current increases, the upward motion of the arc changes to motion to the horizontal (refer to subsection 5.2.2C).
The progression of the arc for the case of an initial current of 62 A is shown in Figs. C9 to C20 in Annex C. In this case the arc exhibited a predominant upward movement and a num-ber of partial arc collapses as it partially short-circuits itself (see Figs. C14 to C17).
As the arc starts to decay beyond recovery, it first exhibits a change of colour at the electrode followed by a decrease in the diameter (or diameters of several parallel paths) and defrag-mentation. This is illustrated in Figs. C21 to C31 in Annex C for the case of an initial current of 82 A. Note that after current interruption (Fig. C29), the remnants of the arc persist for about 4 cycles (Figs. C30 and C31). At higher currents the effect is even more pronounced: the case of arc decay at 165 A initial current is shown in Figs. C32 to C37 in Annex C. It is noteworthy that prior to decay the arc maintains its luminosity despite the decreasing current. This suggests that power input to the arc is constant or increasing and that decay occurs when

Section 5
78
the power input is suddenly removed resulting in an equally sudden temperature drop and the change of colour noted above.
The horizontal movement of the arc, particularly at the higher current values, is judged to be due to the electromagnetic force within the arc loop itself and to be independent of the circuit arrangement. In the Powertech images in Annex C, the viewing direction is such that the arcing horn is to the right of the blade. In the majority of the tests, the arc formed a loop between the blade and the horn and then moved to the right. In a number of cases, refer for example to Figs. C21 to C31, Fig. C55 and Fig. C58, the arc formed a loop to the left and then moved to the left. The upward movement of the arc is due in part to blade motion and then thermal effects.
The arc also exhibited aberrant behaviour. This occurred at the higher currents of 87 A, 90 A and 103 A in which cases the arc “ran” down the opening blade. The 103 A initial current case is shown in Figs. C38 to C45 in both front and side images. Clearly at the point of trans-fer of the current to the arcing contacts, the arc rooted itself on the blade rather than the moving arcing contact as shown in Fig. C46 in Annex C. A solution to prevent this would possibly be to offset the arcing contacts to the outside of the jaw assembly.
C. Arc geometry
The intent of the video records is to determine arc length and arc reach. However, it was not possible to measure arc length with any degree of certainty. The convoluted nature of the arc makes it impossible to define a clear arc path from one electrode to the other even with two camera angles. On a limited number of tests shots, it was possible to measure arc reach as defined by Andrews et al and these test points were plotted on Fig. 5.9 (refer to Fig. 2.5 in subsection 2.4). The test points are in reasonable agreement with those of IREQ. This sheds further doubt, i.e. in addition to that already expressed with regard to transformer magnetiz-ing current, on the work of Andrews et al however well intentioned it may be.F5
As the disconnector opens it is expected that the arc will evolve vertically and horizontally. In the vertical direction, the arc is drawn upwards by the blade motion and in addition by ther-mal effects and the magnetic force, i.e. the force on the arc due to its self magnetic field. The absolute acceptable limit for vertical rise of the arc is that it shall never rise above the eleva-tion of the blade tip when the disconnector is in the fully open position. This is simple logic but reality obviously demands that the disconnector interrupt the current well before this position is reached. In the horizontal direction, the arc is driven primarily by the magnetic force and some limitation on reach is required to avoid the possibility of phase-to-phase flashover. Given this perspective it is only necessary to consider the arc as viewed in the dis-connector longitudinal direction.
F5 Overall the data and results presented by Andrews et al do not stand up well to scrutiny. The transformer magnetizing current tests were discussed in subsection 2.2 and a comparative analysis of the loop switching tests is given in Annex E. On this basis, the IEEE guide must be viewed as questionable.4

Loop switching
79
Still images were made of thirty test shots representative of the range of current and loop impedance used in the test series. Arc X and Y coordi-nates were measured at two cycle intervals for the entire arcing period. The X and Y coordinates in this instance do not denote a single point but rather two points that cor-respond to one another (Fig. 5.10). For each measured image, X is the maximum horizontal point on the arc from a line through the arc roots and Y is the maximum vertical point on the arc from a reference point, which in this case is the jaw end terminal pad. Surprising or not, the arc – whether it moves to the left or to the right – exhibits a dis-tinctive pattern of behaviour.
XY plots for initial current ranges of 15 to 50 A, 51 to 90 A and 91 to 165 A are shown in Figs. 5.11 to 5.13 and a plot for all initial current values in Fig. 5.14. The XY coordinates are all plotted in one direction only regardless of whether the arc was to the left or right of the disconnector. These figures show the following:
• In the range 15 to 50 A (Fig. 5.11), the arc tends to predominantly follow the blade motion rising due to thermal effects and the X-coordinate values are mostly low.
Fig. 5.10 Measurement of X and Y coordinates
Fig. 5.9 Comparison of loop switching test results between
IREQ,9 Andrews et al5 and Peelo

Section 5
80
• In the range 51 to 90 A (Fig. 5.12), the Y-coordinate increases by 0.8 m over and above that for the 15 to 50 A range and the X-coordinate increases due to electromag-netic forces.
• In the range 91 to 165 A (Fig. 5.13), the Y-coordinate remains relatively unchanged compared to the 51 to 90 A range but the X-coordinate has doubled. The reason for this would appear to be that arc collapse (discussed later) provides a natural limiting mechanism on upward motion of the arc.
• Viewing all of the results from 15 to 165 A (Fig. 5.14), the XY coordinates show a triangular pattern, the triangle being bounded by the Y-axis, a horizontal line at Y = 1600 mm and line drawn through the lowest most points. The results are treated statistically in subsection 5.2.3.
The spread in the XY plots is due to the wide range of current and loop impedances. Clearly the higher the current or the impedance the longer the arcing period. In Figs. 5.15 to 5.18, XY plots are shown for four approximately constant current levels and varying impedance.
0
200
400
600
800
1000
1200
0 200 400 600 800 1000
X-coordinates (mm)
Y-co
ordi
nate
s (m
m)
15 to 30 A31 to 50 A
Fig. 5.11 XY plot for initial currents 15 to 50 A
0200400600800
100012001400160018002000
0 200 400 600 800 1000
X-coordinates (mm)
Y-co
ordi
nate
s (m
m)
51 to 70 A71 to 90 A
Fig. 5.12 XY plot for initial currents 51 to 90 A

Loop switching
81
To provide a real perspective on Figs. 5.15 to Fig. 5.18, still images of the arc for each of the cases plotted are shown in Figs. C47 to C60 in Annex C.
0
200
400
600
800
1000
1200
0 100 200 300 400
X-coordinates (mm)
Y-c
oord
inat
es (m
m)
24 A and 40 ohms23 A and 100 ohms21 A and 200 ohms29 A and 150 ohms
Fig. 5.15 XY plots at initial currents 21 to 29 A and varying
loop impedance
0
500
1000
1500
2000
2500
0 500 1000 1500 2000
X-coordinates (mm)
Y-co
ordi
nate
s (m
m)
91 to 110 A111 to 130 A130 to 165 A
Fig. 5.13 XY plot for initial currents 91 to 165 A
0
500
1000
1500
2000
2500
0 500 1000 1500 2000
X-coordinates (mm)
Y-co
ordi
nate
s (m
m) 15 to 30 A
31 to 50 A51 to 70 A71 to 90 A91 to 110 A111 to 130 A131 to 165 A
5.14 XY plot for initial currents 15 to 165 A

Section 5
82
0200400600800
100012001400160018002000
0 200 400 600 800
X-coordinates (mm)
Y-co
ordi
nate
s (m
m)
75 A and 20 ohms73 A and 40 ohms69 A and 70 ohms70 A and 100 ohms
Fig. 5.16 XY plots at initial currents 69 to 75 A and varying loop
impedance
0
500
1000
1500
2000
2500
0 200 400 600
X-coordinates (mm)
Y-c
oord
inat
es (m
m)
98 A and 40 ohms96 A and 100 ohms90 A and 150 ohms
Fig. 5.17 XY plots at initial currents 90 to 98 A and varying loop
impedance
0200400600800
100012001400160018002000
0 500 1000 1500
X-coordinates (mm)
Y-co
ordi
nate
s (m
m)
121 A and 60 ohms124 A and 150 ohms122 A and 200 ohms
Fig. 5.18 XY plots at initial currents 121 to 124 A and varying
loop impedance

Loop switching
83
D. Arc collapse
Arc collapse occurs when two points along the arc come into contact with one another. An example of this is as shown in Figs. C14 to C17. Electrically this represents a partial short circuit of the arc and a decrease in its resistance. The net effect is that the current now trans-fers back from the parallel circuit into the arc path. This is illustrated in Fig. 5.19 which shows the original test trace for the test shot on Figs. C14 to C17. The trace shows two major arc collapses followed by a number of minor collapses and current interruption. At the high currents, the arc takes on a wriggling appearance with multiple minor arc collapses which produces a ripple effect on the disconnector current as shown in Fig. 5.20.
Arc collapse is opportunistic but also inevitable due to the convoluted path of the arc. The longer the arc or – put another way – the longer the arcing time, the more the arc is likely to experience collapses and thus limit its growth. This is demonstrated in Fig. 5.21 for the tests on the 25 kV and 230 kV disconnectors.
Legend (top to bottom): 1. Arc voltage 2. Total current (iS + iL) 3. Voltage across loop (Uoc = 8 kV) 4. Disconnector current (IS = 62 A)
Fig. 5.19 Original test trace: interrupting 62 A with loop impedance 150 ohms

Section 5
84
Legend (top to bottom): 1. Arc voltage 2. Total current (iS + iL) 3. Voltage across loop (Uoc = 8.9 kV) 4. Disconnector current (IS = 145 A)
Fig. 5.20 Original test trace: interrupting 145 A with loop impedance 70 ohms
0123456789
0 1000 2000 3000
Arcing time (ms)
Num
ber o
f arc
col
laps
es
25 kV disconnector
230 kV disconnector
Linear (230 kVdisconnector)
Fig. 5.21 Number of arc collapses versus arcing time for 25 kV and
230 kV disconnectors
5.2.3 Application perspective
The next step is to provide a perspective on how the test results described in the foregoing can be related to actual applications. This will be treated by considering arcing time and arc reach.

Loop switching
85
A. Arcing time
The arcing times for all the Year 2000 230 kV disconnector tests at Powertech are plotted against the initial current in Fig. 5.22 with the loop impedance as parameter. There is an obvious increasing tendency both with initial current and constant loop impedance and with
loop impedance and constant initial current. However, loop impedances greater than 60 or 70 ohms are not realistic in practice and we can limit the loop impedance range to maximum 100 ohms to provide some margin. This is shown in Fig. 5.23 and a linear regression applied
to the test points. The standard deviation of the regression (usually termed the standard error of the estimate) is calculated and shown in Fig. 5.24. Most points are within one standard deviation particularly at the lower initial current values and we can examine the influence of loop impedance as shown in Fig. 5.25 to Fig. 5.31.
0
500
1000
1500
2000
2500
3000
0 50 100 150 200
Initial current (A)
Arc
ing
time
(ms)
20 ohms30 ohms40 ohms60 ohms70 ohms100 ohms110/120 ohms150 ohms200 ohms
Fig. 5.22 Arcing time versus initial current for Powertech Year 2000
tests on 230 kV disconnector
y = 8.9679x + 253.320
500
1000
1500
2000
2500
0 50 100 150 200
Initial current (A)
Arc
ing
time
(ms)
100 ohms or less loopimpedance
Linear (100 ohms or lessloop impedance)
Fig. 5.23 Arcing time versus initial current for loop impedances of
100 ohms or less

Section 5
86
0
500
1000
1500
2000
2500
3000
0 50 100 150 200
Initial current (A)
Arc
ing
time
(ms)
100 ohms or less loop impedance
Plus 1 stddev
Plus 2 stddev
Minus 1 stddev
Minus 2 stddev
Linear (100 ohms or less loopimpedance)Linear (Plus 1 stddev)
Linear (Plus 2 stddev)
Linear (Minus 1 stddev)
Linear (Minus 2 stddev)
Fig. 5.24 Linear regression and standard deviations
0
500
1000
1500
2000
2500
0 50 100 150 200
Initial current (A)
Arc
ing
time
(ms)
20 ohms loop impedance
30 ohms loop impedance
40 ohms loop impedance
60 ohms loop impedance
70 ohms loop impedance
100 ohms loop impedance
Linear regression
Plus 1 stddev
Minus 1 stddev
Linear (Linear regression)
Linear (Plus 1 stddev)
Linear (Minus 1 stddev)
Fig. 5.25 Linear regression and one standard deviation for various impedances
0
500
1000
1500
2000
2500
0 50 100 150 200
Initial current (A)
Arc
ing
time
(ms)
20 ohms loop impedance
30 ohms loop impedance
40 ohms loop impedance
60 ohms loop impedance
70 ohms loop impedance
100 ohms loop impedance
Linear regression
Plus 1 stddev
Minus 1 stddev
Linear (Linear regression)
Linear (Plus 1 stddev)
Linear (Minus 1 stddev)
Fig. 5.26 Linear regression and one standard deviation for 20 ohms loop
impedance

Loop switching
87
0
500
1000
1500
2000
2500
0 50 100 150 200
Initial current (A)
Arc
ing
time
(ms)
20 ohms loop impedance
30 ohms loop impedance
40 ohms loop impedance
60 ohms loop impedance
70 ohms loop impedance
100 ohms loop impedance
Linear regression
Plus 1 stddev
Minus 1 stddev
Linear (Linear regression)
Linear (Plus 1 stddev)
Linear (Minus 1 stddev)
Fig. 5.27 Linear regression and one standard deviation for 30 ohms loop
impedance
0
500
1000
1500
2000
2500
0 50 100 150 200
Initial current (A)
Arc
ing
time
(ms)
20 ohms loop impedance
30 ohms loop impedance
40 ohms loop impedance
60 ohms loop impedance
70 ohms loop impedance
100 ohms loop impedance
Linear regression
Plus 1 stddev
Minus 1 stddev
Linear (Linear regression)
Linear (Plus 1 stddev)
Linear (Minus 1 stddev)
Fig. 5.28 Linear regression and one standard deviation for 40 ohms loop
impedance
0
500
1000
1500
2000
2500
0 50 100 150 200
Initial current (A)
Arc
ing
time
(ms)
20 ohms loop impedance
30 ohms loop impedance
40 ohms loop impedance
60 ohms loop impedance
70 ohms loop impedance
100 ohms loop impedance
Linear regression
Plus 1 stddev
Minus 1 stddev
Linear (Linear regression)
Linear (Plus 1 stddev)
Linear (Minus 1 stddev)
Fig. 5.29 Linear regression and one standard deviation for 60 ohms loop
impedance

Section 5
88
0
500
1000
1500
2000
2500
0 50 100 150 200
Initial current (A)
Arc
ing
time
(ms)
20 ohms loop impedance
30 ohms loop impedance
40 ohms loop impedance
60 ohms loop impedance
70 ohms loop impedance
100 ohms loop impedance
Linear regression
Plus 1 stddev
Minus 1 stddev
Linear (Linear regression)
Linear (Plus 1 stddev)
Linear (Minus 1 stddev)
Fig. 5.30 Linear regression and one standard deviation for 70 ohms loop
impedance
0
500
1000
1500
2000
2500
0 50 100 150 200
Initial current (A)
Arc
ing
time
(ms)
20 ohms loop impedance
30 ohms loop impedance
40 ohms loop impedance
60 ohms loop impedance
70 ohms loop impedance
100 ohms loop impedance
Linear regression
Plus 1 stddev
Minus 1 stddev
Linear (Linear regression)
Linear (Plus 1 stddev)
Linear (Minus 1 stddev)
Fig. 5.31 Linear regression and one standard deviation for 100 ohms loop
impedance
The maximum arcing time tamax for an initial current of IS can be written as:
tamax = 9 IS + 623 …(5.9)
and is applicable to horizontally mounted vertical break disconnectors having the same opening speed as the test disconnector. The blade length of the test disconnector was 2.84 m and the opening time was approximately 4 seconds.

Loop switching
89
B. Arc reach
Arc reach is considered relative to the electrode points, i.e. the blade tip and the arcing horn tap. Horizontal (Hreach) and vertical (Vreach) are defined as:
Hreach = maximum X-coordinate
Vreach = (maximum Y-coordinate) - 0.38
both quantities being in metres. With reference to Figs. 5.11 to 5.14, the test points for the various current ranges fall within boundaries as is shown in Fig. 5.32. This diagram assumes that arc will propagate either to the left or to the right and for example is read as follows: all of the test points in Fig. 5.12 fall within the boundary designated as C, which boundary also captures the boundaries A and B for the lower currents. All test points – Fig. 5.14 – thus fall within boundary D. To provide a three-phase perspective, Fig. 5.33 shows in addition the superimposed minimum metal-to-metal phase-to-phase clearances as recommended in refer-ence 61 and the fully open position blade tip elevations for 72.5 kV, 145 kV and 230 kV disconnectors. This figure illustrates the challenge of dealing with the reality of three-phase loop switching.
The measured horizontal and vertical reach data can be statistically analyzed in the manner as done above for arcing time. Only the cases of loop impedances of 100 ohms or less are con-sidered. The results for horizontal and vertical reaches are shown in Fig. 5.34 and 5.35, respectively. The number of points are limited – a total of 21 – and a prudent statistical (as well as practical) approach is to base application on the plus 2 standard deviation limit. This gives the following equations:
Hreach = 0.0055 IS + 0.36 …(5.10)
and
Vreach = 0.007 IS + 0.86 …(5.11)
C. Practical considerations
Even without as yet examining the electrical characteristics of the arc, loop switching is a complex issue. Empirical relationships have been established between initial current, loop impedance, arcing time and arc reach. These results are presented at face value but noting a reasonable consistency between tests run at different times. No specific guidance or rules are stated because this falls within realm of the individual utility. The reason for this is that each disconnector application is unique, if only in terms of the layout arrangement and associated clearances. However, certain practical considerations can be observed:
1. In applying the results, personnel safety should be maximized and risk minimized.
2. Extreme limits should be avoided: there should always be an expectation that the switching operation will be successful.

Section 5
90
Fig.
5.3
2 A
rc re
ach
boun
darie
s

Loop switching
91
Fig.
5.3
3 A
rc re
ach
boun
darie
s and
min
imum
pha
se-to
-pha
se c
lear
ance
s at 7
2.5
kV, 1
45 k
V a
nd

Section 5
92
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0 50 100 150 200
Initial current (A)
Hor
izon
tal r
each
(m)
Loop impedance 20 to30 ohmsLoop impedance 40 to60 ohmsLoop impedance 70 to100 ohmsLinear regression
Plus 1 stddev
Plus 2 stddev
Linear (Linearregression)Linear (Plus 1 stddev)
Linear (Plus 2 stddev)
Fig. 5.34 Horizontal arc reach for loop impedances of 100 ohms or less
00.20.40.60.8
11.21.41.61.8
2
0 50 100 150 200
Initial current (A)
Ver
tical
reac
h (m
)
Loop impedance 20 to30 ohmsLoop impedance 40 to60 ohmsLoop impedance 70 to100 ohmsLinear regression
Plus 1 stddev
Plus 2 stddev
Linear (Linearregression)Linear (Plus 1 stddev)
Linear (Plus 2 stddev)
Fig. 5.35 Vertical arc reach for loop impedances of 100 ohms or less
3. There is no one encompassing relationship between the initial current, loop impedance, arcing time and arc reach. Limits should be set with respect to one or two quantities and then consider the impact on the other quantities. This may be an iterative process.
4. The tests were run on one phase of a three-phase disconnector. For the current range in question, no electromagnetic influence between phases is expected. However, there is a risk that arcs on adjacent phases may form towards each other and result in a phase-to-phase fault. This situation should be mitigated to the greatest degree possible: there is some evidence to suggest that placement of the arcing horns may provide some control over the location of arc formation.
5. The tests were run on a vertical break type disconnector and due caution should be exercised in applying the results to other disconnector types. This subject is discussed in section 6.

Loop switching
93
6. The behaviour of the arc dominates this switching case. The electrical characteristics of the arc and the condition for arc collapse (extinction) are examined in the next subsection.
5.3 Electrical characteristics of the arc
The electrical characteristics of the arc are examined by considering the arc voltage u and the arc current i. In order, the arc U-I characteristic, the arc resistance U/I, the arc power UI and the rate of change of arc power d(ui)/dt will be examined and discussed. The intent is to confirm that the condition for arc stability is
( ) 0dtuid
> …(5.12)
and to determine related arc-circuit interactions.
MATLAB is used to analyze the data from the Powertech (PT) tests of February and May 2000 and from Eindhoven University of Technology (TUe) and KEMA in 2003. The PT and KEMA tests were performed on a vertical break type disconnector and the TUe tests on a centre-break type disconnector. The PT tests used a current source circuit, while the TUe and KEMA tests used a voltage source circuit.
A. Arc U-I characteristics
The arc U-I characteristics are plotted by taking the peak values of current and the arc voltage corresponding to that current value. Typical U-I plots for the PT tests are shown in Figs. 5.36 and 5.37 and similar plots for TUe in Fig. 5.38. A U-I plot for the KEMA tests is shown later in Fig. 5.39.
Review of Figs. 5.36 to 5.38 shows the following:
• The plots all exhibit the same parabolic shape independent of the disconnector type and the current or voltage source.
• The plots all exhibit good consistency and reproducibility between the tests on the same occasion and on different occasions.
• The plots generally end at a voltage approaching the initial current times the loop impedance. This is the point at which the arc becomes unstable and collapses beyond possible recovery occurs. The arc collapse is discussed further in the following parts of this subsection.
Direct comparison between tests at the three locations can be made for the cases where the loop impedances are equal or reasonably close to one another. Comparison between the PT, TUe and KEMA tests are shown in Fig. 5.39. The comparisons are remarkable for their visual similarity and further by regression as shown in Table 5.1. The regression is parabolic of the form:

Section 5
94
Powertech Februari 2000, Xt = 30 Ω
0 20 40 60 80 100 120 140 160 180 2000
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
PT 5_02
PT 5_13
PT 6_02
PT 7_02
PT 8_02
Peak current [A] →
Vol
tage
at p
eak
curre
nt [k
V] →
Powertech May 2000, Xt = 30 Ω
0 50 100 150 2000
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5 PT 6_19
PT 6_21
PT 7_14
PT 8_24
PT 8_25
PT 7_23
PT 6_29
Peak current [A] →
Vol
tage
at p
eak
curre
nt [k
V] →
Powertech Februari 2000, Xt = 60 Ω
0 50 100 150 200 2500
1
2
3
4
5
6
7
8
9PT 5_03
PT 5_14
PT 6_03
PT 7_03
PT 8_03
Peak current [A] →
Vol
tage
at p
eak
curre
nt [k
V] →
Powertech May 2000, Xt = 60 Ω
0 50 100 150 200 2500
2
4
6
8
10PT 6_20
PT 7_13
PT 8_26
PT 8_27
PT 7_22
PT 6_30
Peak current [A] →
Vol
tage
at p
eak
curre
nt [k
V] →
Fig. 5.36 PT: U-I characteristics for loop impedances 30 and 60 ohms

Loop switching
95
Powertech Februari 2000, Xt = 100 Ω
0 20 40 60 80 100 120 1400
1
2
3
4
5
6
7
8
9
10
PT 5_08
PT 5_19
PT 6_08
PT 7_08
PT 8_08
Peak current [A] →
Vol
tage
at p
eak
curre
nt [k
V] →
Powertech May 2000, Xt = 100 Ω
0 50 100 1500
1
2
3
4
5
6
7
8
9
10 PT 5_28
PT 6_16
PT 7_17
PT 8_18
PT 8_19
PT 7_26
PT 6_26
Peak current [A] →
Vol
tage
at p
eak
curre
nt [k
V] →
Powertech Februari 2000, Xt = 150 Ω
0 20 40 60 80 100 120 140 160 1800
2
4
6
8
10
12
14
16
x
x
x
PT 5_09
PT 5_11
PT 5_20
PT 5_22
PT 6_09
PT 6_11
PT 7_09
PT x 7_11
PT x 8_09
PT x 8_11
Peak current [A] →
Vol
tage
at p
eak
curre
nt [k
V] →
Powertech May 2000, Xt = 150 Ω
0 20 40 60 80 100 120 140 160 1800
2
4
6
8
10
12
14
16
18
x x
x
x
x
x
PT 5_29PT 5_31PT 6_13PT 6_15PT 7_18PT 7_20PT 8_12
PT x 8_16PT x 8_17PT x 7_27PT x 7_29PT x 6_23PT x 6_25
Peak current [A] →
Vol
tage
at p
eak
curre
nt [k
V] →
Fig. 5.37 PT: U-I characteristics for loop impedances 100 and 150 ohms

Section 5
96
Eindhoven University of Technology, Xs = 35 Ω
0 20 40 60 80 100 1200
0.5
1
1.5
2
2.5
3
3.5
x
x
x x x
x x
o
o
TU/e D073TU/e D074TU/e D075TU/e D076TU/e D077TU/e D078TU/e D079
TU/e x D080TU/e x D081TU/e x D082TU/e x D083TU/e x D084TU/e x D085TU/e x D086TU/e o D087TU/e o D088
Peak current [A] →
Vol
tage
at p
eak
curre
nt [k
V] →
Eindhoven University of Technology, Xs = 56 Ω
Eindhoven University of Technology, Xs = 100 Ω
0 5 10 15 20 25 30 35 400
0.5
1
1.5
2
2.5
3
3.5
x
x
x
x
TU/e D023
TU/e D024
TU/e D026
TU/e D027
TU/e D028
TU/e D148
TU/e D149
TU/e x D150
TU/e x D151
TU/e x D152
TU/e x D153
Peak current [A] →
Vol
tage
at p
eak
curre
nt [k
V] →
Eindhoven University of Technology, Xs = 170 Ω
0 5 10 15 200
0.5
1
1.5
2
2.5
3
x
x
x
x
TU/e D017
TU/e D018
TU/e D019
TU/e D020
TU/e D021
TU/e D154
TU/e D155
TU/e x D156
TU/e x D157
TU/e x D158
TU/e x D159
Peak current [A] →
Vol
tage
at p
eak
curre
nt [k
V] →
Fig. 5.38 TUe: U-I characteristics for loop impedances 35, 56, 100 and 170 ohms

Loop switching
97
Comparison KEMA and Powertech cases for X = 20 Ω
10 20 30 40 50 60 70 80 90-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Peak current [A] →
Vol
tage
at p
eak
curre
nt [k
V] →
KEMA 6025KEMA 6025 fitKEMA 6028KEMA 6028 fitPT 6_01PT 6_01 f itPT 6_22PT 6_22 f itPT 6_31PT 6_31 f it
Comparison TUe [X = 75 Ω] and Powertech [X = 70 Ω] cases
10 15 20 25 30 35 40 45 50 55-0.5
0
0.5
1
1.5
2
2.5
3
Peak current [A] →
Vol
tage
at p
eak
curre
nt [V
] →
TU/e D050TU/e D050 fitTU/e D047TU/e D047 fitPT 5_07PT 5_07 fitPT 5_18PT 5_18 fitPT 5_27PT 5_27 fit
Comparison TUe and Powertech cases for X = 100 Ω
5 10 15 20 25 30 35 40-0.5
0
0.5
1
1.5
2
2.5
3
Peak current [A] →
Vol
tage
at p
eak
curre
nt [V
] →
TU/e D023TU/e D023 fitTU/e D027TU/e D027 fitPT 5_08PT 5_08 fitPT 5_19PT 5_19 fitPT 5_28PT 5_28 fit
Comparison TUe [X = 170 Ω] and Powertech [X = 150 Ω] cases
4 6 8 10 12 14 16 18 20 22-0.5
0
0.5
1
1.5
2
2.5
Peak current [A] →
Vol
tage
at p
eak
curre
nt [V
] →
TU/e D018TU/e D018 fitTU/e D021TU/e D021 fitPT 5_11PT 5_11 fitPT 5_22PT 5_22 fitPT 5_31PT 5_31 fit
Fig. 5.39 Comparison between PT, TUe and KEMA U-I characteristics

Section 5
98
Table 5.1 Regression analysis for plots in Fig. 5.39
Loop impedance (ohms) Test shot
A (kV/A²)
B (kV/A)
C (kV)
Arcing time (ms)
Initial current(A)
20 KEMA 6025 -0.000104 -0.0117 1.5488 1340 53 20 KEMA 6028 -0.000175 -0.0042 1.3742 957 54 20 PT 6_01 -0.00001115 -0.02 1.4764 405 50 20 PT 6_22 -0.00007065 -0.013865 1.3896 264 50 20 PT 6_31 -0.000061875 -0.01409 1.4816 507 52 70 TUe D050 -0.0011292 -0.0043981 2.8568 1203 34 70 TUe D047 -0.0015965 0.031036 2.2749 1164 34 70 PT 5_07 -0.00089545 -0.014521 2.6048 807 34 70 PT 5_18 -0.0014191 0.025659 2.018 708 35 70 PT 5_27 -0.0011638 0.0085697 2.294 291 33 100 TUe D023 -0.0035574 0.081565 1.6103 917 25 100 TUe D027 -0.0023317 0.0011489 2.9155 890 25 100 PT 5_08 -0.0017985 -0.022021 2.5186 708 23 100 PT 5_19 -0.003947 0.090545 1.2519 775 24 100 PT 5_28 -0.0020869 -0.0074231 2.5112 500 23 150 TUe D018 -0.0072819 0.063179 2.0734 880 15 150 TUe D021 -0.0067408 0.03726 2.384 850 15 150 PT 5_11 -0.0057214 0.025106 1.9601 675 16 150 PT 5_22 -0.0070318 0.068585 1.7751 425 16 150 PT 5_31 -0.0082058 0.11239 1.3889 601 15
U = AI2 + BI + C …(5.13)
where U is in kV, I in amperes and A, B and C are constants.
Despite the differences in the disconnector types and circuit sources, the arc as a circuit element appears to behave in a similar manner in electrically similar circuits (refer also to subsection 5.4).
B. Arc resistance U/I
The arc resistance U/I for comparable PT, KEMA and TUe tests are shown in Fig. 5.40. For any individual test, the plots show a similar pattern by way of a gradual build-up of resistance and a very rapid increase in resistance as the arc goes towards extinction. Partial arc collapses are clearly evident.
The TUe tests, in particular, exhibit on the whole a slower rate of increase of arc resistance and thus a longer arcing time. This is judged to be related to the disconnector type (centre break) and is discussed in section 6.
C. Arc power UI
The arc power UI for comparable PT, KEMA and TUe tests are shown in Fig. 5.41. The plots show that the arc power increases at an increasing rate to a point where the arc stalls (d(ui)/dt = 0) and instability and collapse follow. The condition for arc instability is discussed in the subsection 5.3D.

Loop switching
99
Powertech Februari 2000 and May 2000, Xt = 20 Ω
0 100 200 300 400 500 600 700 800 900 10000
20
40
60
80
100
120
23 A
24 A
47 A71 A
97 A
50 A74 A
103 A
103 A
75 A
52 A
Februari 2000
May 2000
Arcing time [ms] →
Arc
resi
stan
ce [ Ω
] →
KEMA disconnector Juli 2003, Xs = 20 Ω
0 200 400 600 800 1000 1200 14000
10
20
30
40
50
60
70
80
53 A
54 A
54 A
54 A
KEMA 6025
KEMA 6026
KEMA 6027
KEMA 6028
Arcing time [ms] →
Arc
resi
stan
ce [ Ω
] →
Powertech Februari 2000 and May 2000, Xt = 60 Ω
0 500 1000 1500 2000 25000
50
100
150
200
250
300
350
39 A
40 A
78 A 116 A
159 A82 A
122 A
165 A
165 A
122 A
86 A
Februari 2000May 2000
Arcing time [ms] →
Arc
resi
stan
ce [ Ω
] →
TUe, Xs = 56 Ω
0 500 1000 15000
50
100
150
200
250
300 46 A
46 A
46 A
46 A
46 A
46 A
45 A
45 A
46 A
46 A46 A
47 A
46 A
46 A46 A
46 A
47 A
Wilczek 2.5 kVVis & De Kleijn 2.5 kV
Arcing time [ms] →
Arc
resi
stan
ce [ Ω
] →
Fig. 5.40 Arc resistance for comparable PT, KEMA and TUe tests

Section 5
100
Powertech Februari 2000 and May 2000, Xt = 20 Ω
0 100 200 300 400 500 600 700 800 900 10000
20
40
60
80
100
120
140
23 A24 A
47 A
71 A
97 A
50 A
74 A
103 A
103 A
75 A
52 A
Februari 2000
May 2000
Arcing time [ms] →
Arc
Pow
er [k
W] →
KEMA disconnector Juli 2003, Xs = 20 Ω
0 200 400 600 800 1000 1200 14000
5
10
15
20
25
30
35
53 A
54 A
54 A
54 A
KEMA 6025
KEMA 6026
KEMA 6027
KEMA 6028
Arcing time [ms] →
Arc
Pow
er [k
W] →
Powertech Februari 2000 and May 2000, Xt = 60 Ω
0 500 1000 1500 2000 25000
100
200
300
400
500
600
700
800
900
39 A40 A
78 A
116 A
159 A
82 A
122 A
165 A
165 A
122 A86 A
Februari 2000
May 2000
Arcing time [ms] →
Arc
Pow
er [k
W] →
TUe, Xs = 56 Ω
0 500 1000 15000
10
20
30
40
50
60
70
46 A
46 A
46 A
46 A
46 A
46 A
45 A45 A
46 A
46 A
46 A
47 A
46 A46 A46 A
46 A
47 A
Arcing time [ms] →
Arc
Pow
er [k
W] →
Wilczek 2.5 kV
Vis & De Kleijn 2.5 kV
Fig. 5.41 Arc power for comparable PT, KEMA and TUe tests

Loop switching
101
Powertech May 2000, Xt = 100 Ω
0 200 400 600 800 1000 1200 1400 16000
100
200
300
400
500
23 A
44 A
70 A
95 A
96 A
70 A
49 A
Arcing time [ms] →
Arc
Pow
er [k
W] →
Powertech May 2000, Xt = 100 Ω
0 200 400 600 800 1000 1200 1400 1600
-9000
-8000
-7000
-6000
-5000
-4000
-3000
-2000
-1000
0
1000
23 A44 A
70 A
95 A
96 A
70 A
49 A
Arcing time [ms] →
d/dt
Arc
Pow
er [W
/s] →
Fig. 5.42 Arc power and rate of change of arc power d(ui)/dt
Fig. 5.42 shows the arc power and rate of change of arc power for the PT tests at 100 ohms loop impedance. The latter quantity has a waterfall pattern and is initially greater than zero as it has to be for the arc to propagate. Arc propagation ceases when the rate of change equals zero and instability and collapse eventually follow.
Another variation is to consider the maximum arc power and the initial current with constant loop impedance as is done in Fig. 5.43 for a number of PT tests. There is a well fitting quad-ratic relationship in evidence and the question now is whether an equally good fit exists between comparable tests at PT and TUe. The answer to this is affirmative (Fig. 5.44) and the conclusion is that the maximum arc power is determined by the initial current and the loop impedance and is apparently independent of the disconnector type and source type (voltage or current).
Powertech Februari 2000 and May 2000
0 20 40 60 80 100 120 140 160 180
0
100
200
300
400
500
600
700
800
900
1000
1100
Xt = 20 Ω
Initial Current [A] →
Max
imum
Arc
Pow
er [k
W] →
Xt = 30 Ω
Xt = 40 Ω
Xt = 60 Ω
Xt = 70 Ω
Xt = 100 Ω
Fig. 5.43 Maximum arc power versus initial current with
loop impedance as parameter

Section 5
102
Powertech & Eindhoven
0 50 100 1500
50
100
150
200
250
300
350
400
Initial Current [A] →
Max
imum
Arc
Pow
er [k
W] →
TU/e Xs = 35 Ω
Powertech Xt = 30 Ω
Powertech & Eindhoven
0 20 40 60 80 100 1200
50
100
150
200
250
300
350
Initial Current [A] →
Max
imum
Arc
Pow
er [k
W] →
TU/e Xs = 46 Ω
Powertech Xt = 40 Ω
Powertech & Eindhoven
0 20 40 60 80 100 120 140 160 1800
200
400
600
800
1000
1200
Initial Current [A] →
Max
imum
Arc
Pow
er [k
W] →
TU/e Xs = 56 Ω
Powertech Xt = 60 Ω
Powertech & Eindhoven
0 20 40 60 80 100 120 140 1600
100
200
300
400
500
600
700
800
900
Initial Current [A] →
Max
imum
Arc
Pow
er [k
W] →
TU/e Xs = 75 Ω
Powertech Xt = 70 Ω
Fig. 5.44 Maximum arc power versus initial current with loop impedance as parameter for comparable PT and TUe tests

Loop switching
103
D. Arc d(ui)/dt characteristics
In subsection 5.2.2B it is noted that the luminosity of the arc is sustained until just prior to arc extinction. Ignoring the effect of partial arc collapse, this requires an increasing rate of change of power input particularly since the arc is also continuing to grow in length. This condition can be expressed as (Eqn. (5.12)):
d(ui)/dt > 0
which in turn can be expanded to
0dtdui
dtdiu >+
or
0dt/didt/du
iu
>+ …(5.14)
But u/i is the arc resistance r and for the same time increment, we can also write
r + du/di > 0 …(5.15)
Eqn. (5.15) is of the same form as describes the condition for arc stability in a DC circuit as (apparently) first calculated by Kaufmann.63 Using the original notation, Kaufmann’s equa-tion reads:
0JEW >∂∂
+ …(5.16)
where W is the resistance of the circuit external to the arc and J is the arc current.
Eqns. (5.14) and (5.15) relate only to the arc and we must now consider their implications. Rewriting Eqn. (5.14) in a new form:
r/du/dt/di/dt > -1 …(5.17)
we now have the condition or index for arc stability.
With reference to U-I characteristics of Figs. 5.36 and 5.37, r is the instantaneous arc resis-tance and du/dt/di/dt (or du/di) is the rate of change of arc resistance. Initially, in the period immediately after contact parting, r will have a low value while du/di has a high value and the index will be close to zero. As the arc grows in length, r will increase and du/di will decrease and the index starts to go negative. When the index goes below -1, the arc becomes unstable and arc collapse may follow unless there is an intervention to restore its stability. A partial arc collapse would be such an intervention.

Section 5
104
The above reasoning is supported and illustrated by considering the Powertech test cases shown in Figs. 5.19 (test no. 6_15) and 5.20 (test no. 8_20). Test no. 6_15 is for an initial current of 62 A and a loop impedance of 150 ohms and is shown in Fig. 5.45. Test no. 8_20 is for an initial current of 143 A and a loop impedance of 70 ohms and is shown in Fig. 5.46. The plots from top to bottom in Figs. 5.45 and 5.46 show the arc power, the rate of change arc power and lastly the stability index, all versus time. Video images from test no. 6_15 are shown in Figs. C9 to C20 (note that time zero for the figures occurs after time zero on the traces).
For test no. 6_15, the arc becomes unstable beyond recovery at 1100 ms which time corre-sponds to the image in Fig. C19. Prior to this, the rate of change of arc power becomes negative between 600 and 700 ms and between 800 and 900 ms, both indicating a certain arc instability. The stability index also indicates a tendency towards instability by dipping below zero. Recovery after the first period is due to a partial arc collapse at about 700 ms (Fig. C15). This is followed by a rare event at 800 ms: a re-establishment of the previous longer arc path (Fig. C16) giving an increase in arc resistance. A partial arc collapse follows imme-diately but is not apparent on the video images.
The test no. 8_20 plots reflect the ripple effect evident on the disconnector current trace (Fig. 5.20). The stability index plot shows a series of potential arc instabilities until the ultimate instability and collapse occurs at about 1700 ms.
The plots in Figs. 5.45 and 5.46 cannot be used to make any quantitative assessment of when total arc collapse will follow arc instability. Depending on the degree of smoothing utilized, the plot appearances will vary. This is illustrated in Fig. 5.47. A seemingly minor event in one plot can appear as a major event in the other.
E. Discussion on arc modelling
The intent of developing an arc model is to provide a means of calculating the arcing time given an initial current and the loop impedance. In its simplest form, the model could be a time varying resistance replacing the disconnector in Fig. 5.1. The typical variations of arc resistance are as shown in Fig. 5.40: there is an initial gradually rising part followed by an exponential increase at arc instability and collapse. For shorter arcing times, the resistance r can be expressed as:
tlnba1r
+= …(5.18)
were t is time in seconds and a and b are constants. For the longer arcing times, Fig. 5.40 shows that gradually rising period can be greatly prolonged and suggests that a time shift should be introduced into Eqn. (5.18) in some form or other.

Loop switching
105
Powertech May 2000, test: 6_15, Xt = 150 Ω, Initial current = 62 A
0 200 400 600 800 10000
50
100
150
200
250
300
Arcing time [ms] →
Arc
pow
er [k
W] →
No smoothing3 x Mean over 5 points
0 200 400 600 800 1000-4000
-3000
-2000
-1000
0
1000
2000
3000
4000
Arcing time [ms] →
d/dt
Arc
pow
er [W
/ms]
→
0 200 400 600 800 10000
100
200
300
400
Arc
resi
stan
ce [ Ω
] →
d/dt Arc PowerArc resistance
Powertech May 2000, test: 6_15, Xt = 150 Ω, Initial current = 62 A
0 200 400 600 800 1000 1200-12
-10
-8
-6
-4
-2
0
2
4
6
8
Line at y = -1
End of arcing time
r arc⋅
(dî ar
c/dt)/
(dû ar
c/dt) →
Arcing time [ms] →
Arcing time: 1157 ms
Intersection with y = -1
∆t: -63 ms
No smoothing3 x Mean over 3 points
Fig. 5.45 PT test no. 6_15

Section 5
106
Powertech May 2000, test: 8_20, Xt = 70 Ω, Initial current = 143 A
0 200 400 600 800 1000 1200 1400 16000
200
400
600
Arcing time [ms] →
Arc
pow
er [k
W] →
No smoothing3 x Mean over 5 points
0 200 400 600 800 1000 1200 1400 1600-4000
-3000
-2000
-1000
0
1000
2000
3000
4000
Arcing time [ms] →
d/dt
Arc
pow
er [W
/ms]
→
0 200 400 600 800 1000 1200 1400 16000
50
100
150
200
Arc
resi
stan
ce [ Ω
] →
d/dt Arc PowerArc resistance
Powertech May 2000, test: 8_20, Xt = 70 Ω, Initial current = 143 A
0 200 400 600 800 1000 1200 1400 1600 1800-12
-10
-8
-6
-4
-2
0
2
4
6
8
Line at y = -1
End of arcing time
r arc⋅
(dî ar
c/dt)/
(dû ar
c/dt) →
Arcing time [ms] →
Arcing time: 1774 ms
Intersection with y = -1
∆t: -46 ms
No smoothing3 x Mean over 3 points
Fig. 5.46 PT test no. 8_20

Loop switching
107
Powertech May 2000, test: 8_26, Xt = 60 Ω, Initial current = 168 A
0 200 400 600 800 1000 1200 1400 1600-12
-10
-8
-6
-4
-2
0
2
4
6
8
Line at y = -1
End of arcing time
r arc⋅
(dî ar
c/dt)/
(dû ar
c/dt) →
Arcing time [ms] →
Arcing time: 1550 ms
Intersection with y = -1
∆t: -121 ms
No smoothing3 x Mean over 3 points
Powertech May 2000, test: 8_26, Xt = 60 Ω, Initial current = 168 A
0 200 400 600 800 1000 1200 1400 1600-12
-10
-8
-6
-4
-2
0
2
4
6
8
Line at y = -1
End of arcing time
r arc⋅
(dî ar
c/dt)/
(dû ar
c/dt) →
Arcing time [ms] →
Arcing time: 1550 ms
Intersection with y = -1
∆t: -296 ms
No smoothing3 x Mean over 3 points
Fig. 5.47 PT test no. 8_26 with different smoothing factors:
5 for the upper plot and 7 for the lower plot

Section 5
108
Using Eqn. (5.18) and assuming the applicable constants are known, it is possible to perform an iterative calculation giving the arcing time when the disconnector current goes to zero. However, generalization of this approach is difficult because the values of the constants will vary for different initial currents and loop impedances and even for the same current and loop impedance (for example no one equation will cover all of the cases shown in Fig. 5.40).
In the literature, the modelling of long arcs in air has been reported in connection with secon-dary arcs.64, 65 Both studies used a basic arc equation of the form:
)gG(1dtdg
−τ
= …(5.19)
where g is the time varying arc conductance, G is the stationary arc conductance and τ is a time constant. G is defined differently in each study with the evolving arc length being a common element. A cursory test of the validity of this approach to the loop switching case shows that it does give a reasonable commutation process representation. However, the derived arc voltages and currents do not resemble those of the loop switching case.
A difficulty with the modelling overall is the need to know how the arc length and resistance evolve with time. The convoluted nature of the loop switching arc, particularly at the higher current values, is evident in the video images in Annex C. Determination of arc length with any degree of accuracy from the images is judged to be close to impossible. The arc resis-tances, however, exhibit a repetitive shape and this can most probably be exploited. The challenge is to find an arc resistance relationship for varying current with constant loop impedance and then between the various loop impedances. A data mining approach may offer the best opportunity to achieve this.
To have a totally realistic arc model, the partial arc collapse events also need to be incorpo-rated. The dynamic U-I characteristics for Powertech test nos. 6_16 and 8_20 are shown in Figs. 5.48 and 5.49, respectively (for clarity the initial first quarter of arcing has been omit-ted). Despite having a different basis, there is a certain orderliness to them, not the least because they have the laws of electricity in common. However, the loop switching arcs would appear to meet the definition of a chaotic system in that they are (1) deterministic through description by mathematical rules and (2) have mathematical descriptors that are non-linear in some way. Treating the arc as a chaotic system has in fact been used with success for arcs in electrical arc furnaces.68–71 The issue in that case is a determination of the fluctuations in the arcs and consequent voltage flicker. The U-I characteristics of such arcs vary over a certain range due to the fluctuations, while the loop switching U-I characteristics vary over a wider range due to commutation of the current and the fluctuations caused by partial arc collapse. The conclusion is that this approach can be extended to the loop switching case.

Loop switching
109
Powertech May 2000, test: 6_15, Xt = 150 Ω
-100 -80 -60 -40 -20 0 20 40 60 80 100-15
-10
-5
0
5
10
15
Current [A] →
Vol
tage
[kV
] →
Fig. 5.48 Dynamic U-I characteristic for Powertech test no. 6_15
Powertech May 2000, test: 8_20, Xt = 70 Ω
-250 -200 -150 -100 -50 0 50 100 150 200 250-15
-10
-5
0
5
10
15
Current [A] →
Vol
tage
[kV
] →
Fig. 5.49 Dynamic U-I characteristic for Powertech test no. 8_20

Section 5
110
5.4 Conclusions
Loop switching relies on a natural commutation of current from one circuit to a parallel circuit. Despite the apparent randomness of the arc certain patterns of behaviour and relation-ships can be found between the initial current in the disconnector, the loop impedance, arcing time and arc reach. This suggests that the arc can better be described as one of ordered chaos. Repeat tests on different occasions months apart and as part of the same test series showed a reasonable consistency enabling a statistical evaluation of the above-noted quantities.
In order to determine and understand the condition that must be satisfied for the arc to extin-guish, the arc voltage and current data from the various tests at three locations was examined. Arc collapse follows a period of arc instability caused by a change in the rate of change of power input from positive to negative. The actual condition for arc instability has the form as that for an arc in a DC circuit. This is not unexpected because the arc is sustained by its power input and the source of the power, whether DC or AC, is not an issue. To put this in perspective, the arc can be viewed as operating as a series of static arcs of increasing length as shown in Fig. 5.50. The actual, or dynamic, U-I characteristic is superimposed (refer to Figs. 5.36 to 5.38) and the arc will thus operate at the successive connection points a, b, … l. If the arc were to stall at connection point g for example, then the arc would be stable and sustained. The arc however continues to evolve and eventually reaches a length such that the two characteristics become tangential (connection point l) and ceases to evolve further because the power input is now constant or decreasing. Arc instability and collapse follow.
Fig. 5.50 Static and dynamic arc characteristics

Loop switching
111
Further conclusions can be drawn with respect to the U-I characteristics of Figs. 5.36 to 5.39. Considering Eqn. (5.13), at I = 0 (arc extinction) the voltage U = IS (XS + XL) giving the value for C; at U = 0 and I = IS (arc initiation), we can write:
AIS2 + BIS + C = 0 …(5.20)
Since C is already known, A and B can be related by solving Eqn. (5.20) resulting in only one unknown.
Modelling of the arc for this switching event presents a significant challenge. The recom-mended approach is to represent the arc as a time-varying resistance. This requires further analysis of the test data and the data mining technique is suggested as the tool for the purpose. A further approach worth consideration is to extend the arc furnace chaotic system development to the loop switching case.
Lastly, this research work has provided ample evidence that the assumptions and test methods used by Andrews et al5 do not stand up to scrutiny. That work should now be viewed as highly questionable.


Section 6
113
Discussion on use of other disconnector types
Four types of disconnectors are described in section 1 each with its own contact design fea-tures and blade movement. Viewed in terms of current interruption, the vertical break and pantograph types both have a blade movement in a vertical plane and centre break and double break in a horizontal plane. Therefore, certain similarities in current interruption performance and arc propagation can be drawn.
One immediate distinction can be made between the vertical break type disconnector and the other three disconnector types. To make this distinction only the influence of blade move-ment on the arc is considered:
• For the vertical break type (Fig. 1.1), the blade movement draws the arc upwards in a plane along the longitudinal axis of the disconnector. No excursion of the arc into the space between phases can be attributed to blade movement.
• For the centre break and double break type disconnectors (Figs. 1.2 and 1.3, respec-tively), the blade movement draws the arc outwards in a horizontal plane. For the centre-break disconnector, the blade movement is in the same direction on all three phases and the arcs are drawn towards the adjacent phase on two of the three poles but in no case towards one another. For the double break disconnector, the blade move-ment is in both directions and there is again excursion of the arc horizontally between phases and, more significantly towards one another, i.e. from the outer phases towards the centre phase.
• For the pantograph type (Fig. 1.4), the blade movement draws the arc downward in a vertical plane at right angles to the axis of the busbars. Due to the scissors effect, the arc may be drawn on the side towards an adjacent phase and the arcs of adjacent phases may be drawn towards one another.
For unloaded transformer magnetizing currents of 1 A or less, interruption is dependent on achieving the required contact gap spacing as discussed in sections 3 and 4, respectively.F6 All four disconnector types can be viewed as being essentially equal in terms of interrupting capability at these current levels and arc reach is not considered to be an issue. For currents greater than 1 A, thermal effects will cause the arc to rise vertically and reaching of the arc will be evident. The vertical break and pantograph type disconnectors are judged to have similar performance and capability at these current levels. The same can be said for centre break and double break type disconnectors. Prolonged arcing can be expected and caution should be exercised in this regard. Additionally, the influence of inrush current should be recognized.
F6 Refer also to the case study in Annex B.

Section 6
114
For capacitive currents in this regard, the conclusions are similar to those for the above-noted transformer magnetizing current case. Generally for the longer arc durations, particularly for currents greater than 1 A, there will be an upward motion of the arc – refer to Figs. 4.5, 4.7, 4.8 and 4.14 (upper image).
The Powertech and KEMA loop switching tests were performed on a vertical break type dis-connector, while those at Eindhoven used a centre break type disconnector. The similarities and differences in the electrical characteristics of the arcs have been discussed in subsection 5.3. The consideration here will deal with arcing time, flame type and the conclusions that can be drawn.
For the same range current and loop impedance, the centre break disconnector exhibited a longer arcing time as shown in Fig. 6.1. The Eindhoven results show an obvious decreasing tendency at the higher currents and a polynomial type regression was used. For the Powertech
results, the same type of regression was used for comparison purposes even though there is no similar tendency; in fact, a linear regression shows a steady increase in arcing time with increasing current. This difference in performance can be attributed to the differences in build-up of arc resistance as noted in subsection 5.3B and as discussed below.
The flame associated with the Eindhoven test arcs as shown in Fig. 6.2 is quite different from those of the Powertech tests (refer to Annex C). The flame is quite smooth even at the higher current as compared to the turbulent flames shown in Annex C. The reasons for this differ-ence most probably lie in the realm of arc physics but some relative performance related conclusions can nonetheless be drawn.
0200
400600
8001000
12001400
16001800
0.00 20.00 40.00 60.00 80.00 100.00
Initial current (A)
Arci
ng ti
me
(ms)
TUe 32 to 170 ohms
Powertech 30 to 150 ohms
Poly. (TUe 32 to 170ohms)Poly. (Powertech 30 to150 ohms)
Fig. 6.1 Comparison of arcing times between Powertech and Eindhoven loop switching tests

Discussion on use of other disconnector types
115
Fig. 6.2 Typical arc images from the Eindhoven tests
For the vertical break and pantograph type disconnectors, the blade motion is such that it is drawing out the arc in the direction of its natural propagation. The same cannot be said for the centre and double break type disconnectors. This reasoning suggests that the influence of the blade motion is more than might have been thought at first glance. Thus, for the horizontally opening disconnectors, more onus is placed on the arc itself to achieve current interruption. The conclusion is that vertical break and pantograph type disconnectors offer superior per-formance for loop switching than the centre break and double break types.


Section 7
117
General conclusions and suggestions for further research
High voltage air-break disconnectors have a certain but limited capability to interrupt unloaded transformer magnetizing currents, capacitive currents and loop currents. Each switching duty is shown to be clearly unique in its own way and thus requiring of individual review and analysis.
Before dealing with the above-noted switching duties, it is appropriate to address the princi-pal past work in this subject. That work was done by Andrews et al5 in the 1940s and has largely been viewed as the definitive work on disconnector interrupting capability. It is shown that the work was based on an invalid assumption which further influenced the test circuits used. The conclusion is that this work should now be viewed as having questionable value.
For switching unloaded transformer magnetizing currents of 1 A or less, interruption is dependent on achieving a minimum contact gap spacing. At higher currents, usually not exceeding 2 A for modern low-loss transformers, thermal effects become influential and the required contact gap spacing for interruption becomes greater. The time to reach the inter-rupting contact gap spacing is a key factor and a higher blade opening speed or the addition of whip type auxiliary interrupting devices should be considered. It is mandatory to also con-sider the effect that overvoltages due to restriking may have on the transformer and suitable elimination or mitigation measures should be implemented. Inrush current, which can follow as a result of a restrike, does not contribute to the propagation of the arc but rather prolongs the arcing times by its duration.
For capacitive current switching, successful interruption is more complex being dependent on a minimum contact gap spacing, the magnitude of the current and the ratio of the source (CS) to load (CL) side capacitances. The worst cases for arc duration and overvoltage generation occur when CS/CS < 1. The prudent approach is to limit the current to be interrupted to those suggested by the standards, i.e. 0.5 A or less.1, 62 Higher currents up to 2 A can be interrupted (based principally on field experience) provided that it is understood and accepted by the user that the disconnector may be close to the fully open position at current interruption. Whip type auxiliary interrupting devices offer advantage and are judged to have an interrupting capability not exceeding 7 A. The so-called 600 kVA rule is often cited in North America for this switching case: any merit that this rule may have is judged to be coincidental rather than factual.
The major part of this work addresses the loop switching case. This case, in contrast to the two cases of low currents and high recovery voltages discussed above, is one of high currents up to several hundred amperes and low recovery voltages. Empirical relationships can be found between the initial current in the disconnector, the loop impedance, the arcing time and the arc reach. On a theoretical basis, it is shown that the condition to be satisfied for arc sta-bility in this AC case is similar to that for an arc in a DC circuit. For purposes of arc model-

Section 7
118
ling and given the difficulty in defining arc length, an arc resistance versus time is the suggested approach. Further research, however, is required in this regard.
Four different types of disconnector – vertical break, centre break, double break and panto-graph – are commonly used in high voltage substations. By virtue of its blade motion, the vertical break type is judged to be the most suitable for current interruption.
As to further research, this should be directed towards the loop switching case as follows:
• To investigate the influence of the electrode material for the case of very high currents up to 2000 A with loop impedances of 1 ohm or less. There is evidence to suggest that refractory material such as tungsten will offer advantage over cold cathode material such as copper and aluminum.
• To investigate the initial point of arc formation and its influence on the further direc-tion of propagation of the arc. The Powertech tests showed evidence the arc tended to propagate in a direction away from the side of the disconnector where the arc was first formed. This suggests that control over the direction of arc propagation may be possi-ble by judicious placement of the arcing horns.
• To investigate further the development of an arc model. The suggested approaches are that of treating the arc as a time-varying resistance and/or viewing the arc as an ordered chaotic system. Some limitation on the range of current and loop impedance to be addressed would be beneficial and utilities should be consulted in this regard.

Section 8
119
References
1. IEC 62271-102 Alternating current disconnectors and earthing switches – First edition 2001-12.
2. IEEE Std C37.100-1992 IEEE Standard Definition for Power Switchgear.
3. ANSI Std C37.30-1970/IEEE Std 324-1971 Definitions and Requirements for High-Voltage Air Switches, Insulators and Bus Supports. Revised in 1992 and 1997 to become IEEE Std C37.30-1997 IEEE Standard Requirements for High-Voltage Switches.
4. IEEE C37.36b-1990 IEEE Guide to Current Interruption with Horn-Gap Air Switches.
5. F.E. Andrews, L.R. Janes and M.A. Anderson, “Interrupting Ability of Horn-Gap Switches,” AIEE Transactions, Vol. 69, 1950.
6. D.F. Peelo, “Current Interrupting Capability of Air Break Disconnect Switches,” IEEE Transactions on Power Delivery, Vol. PWRD-1, No. 1, January 1986 and Correction, IEEE Transactions on Power Delivery, Vol. PWRD-2, No. 4, October 1987.
7. AIEE Committee Report, “Report on Transformer Magnetizing Current and Its Effect on Relaying and Air Switch Operation,” AIEE Transactions, Vol. 70, 1951.
8. IEEE Committee Report, “Results of Survey on Interrupting Ability of Air Break Switches,” IEEE Transactions on Power Apparatus and Systems, Vol. PAS-85, No. 9, September 1996.
9. CEA Project 069 T 102 Report, The Interrupting Capability of High Voltage Discon-nect Switches, July 1982.
10. P.A. Abetti, “Arc Interruption with Disconnecting Switches,” Master Thesis, Illinois Institute of Technology, January 1948.
11. J.E. Gerngross, “Arcs on Horn-Gap Switches,” Master Thesis, Illinois Institute of Tech-nology, January 1949.
12. P. Ackermann, “A Study of Transmission Line Power-Arcs,” The Engineering Journal, Vol. XI, No. 5, May 1928.
13. C.S. Beattie and S.C. Killian, Discussion of reference 5, AIEE Transactions, Vol. 69, 1950.
14. Bulletin 2.3.1-1B, I-T-E Outdoor Air Switches Selection and Application, 8.25 kV three 800 kV Maximum Voltage. (Date unknown.)
15. M.W. Anderson, “Power Autotransformer Current Interruption with an Air-Break Disconnect Switch,” AIEE Transactions, Vol. 74, 1955.

Section 8
120
16. G.F. Farmer, “A Phenomenon of Air Break Switching of Magnetizing Current,” Canadian Electrical Association Fall Meeting, Halifax, November 1975.
17. E.L. Luehring and J.P. Fitzgerald,” Switching the Magnetizing Current of Large 345 kV Transformers with Double-Break Air Switches,” IEEE Transactions on Power Apparatus and Systems, Vol. PAS-84, No. 10, October 1965.
18. A.H. Powell, “Dielectric and other problems in the design of a new 330 kV outdoor air switch,” AIEE Transactions, Vol. 73, February 1954.
19. D.F. Peelo, “Unloaded transformers can be switched reliably with disconnect switches,” Transmission & Distribution, July 1987.
20. P.E. Richardson and A. Foti, “Gas-Blast Switch Tests on 230-kV System,” Electrical Engineering, August 1956.
21. A. Foti and J.M. Lakas, “EHV Switch Tests and Switching Surges,” IEEE Transactions on Power Apparatus and Systems, Vol. 83, No. 3, March 1964.
22. D.L. Lott, “Surge-Suppressing Resistors Applied to EHV Disconnect Switches,” Allis-Chalmers Engineering Review. (Reprint date unknown.)
23. E.C. Rankin, “Experience with Methods of Extending the Capability of High-Voltage Air Break Switches,” AIEE Transactions, Vol. 79, February 1960.
24. F.S. Toomer, “Switches of 115 kV (Lines) Updated as Capacity,” Electrical World, March 1965.
25. S.G. Patel, W.F. Holcombe and D.E. Parr, “Application of Air-Break Switches for De-energizing Transmission Lines,” IEEE Transactions on Power Apparatus and Systems, Vol. 4, No. 1, January 1987.
26. G.E. Buchanan, Discussion of reference 23, AIEE Transactions, Vol. 79, February 1960.
27. I.W. Gross, S.C. Killian and J.M. Sheadel, “A 330-kV Air Switch,” AIEE Transactions, Vol. 73, April 1954.
28. H.L. Rorden, J.M. Dils, S.B. Griscom, J.W. Skooglund and E. Beck, “Investigations of Switching Surges Caused by 345-kV Disconnecting-Switch Operation,” AIEE Trans-actions, Vol. 77, October 1958.
29. M.B. McNulty, “Guide for Interrupting Loop Circuit,” Transmission & Distribution, February 1968.
30. K.R. Shah, “Switching Severity of Horn-Gap Switches,” IEEE Transactions on Power Apparatus and Systems, Vol. 91, July/August 1972.

References
121
31. R.H. Harner, Discussion of reference 31, IEEE Transaction on Power Apparatus and Systems, Vol. 91, July/August 1972.
32. J.J. Keane, R.G. Andrei and B.R. Halley, “American Electric Power Experience with Loop Switching in EHV Stations,” IEEE Transactions on Power Delivery, Vol. 6, No. 4, October 1991.
33. IEEE Std-4, 1995, IEEE Standard Techniques for High-Voltage Testing.
34. D.W. Durbak, S.R. Lambert and R.J. Ringlee, “Ferroresonance Can Damage Transformers During Air Break Switch Operation,” Power Technology, Issue No. 63, October 1990.
35. R.J. Carpentier, D.W. Durbak, S.R. Lambert and R.J. Ringlee, “Ferroresonance-Induced Failures in High Voltage Transformers by Air Break Switch Operations,” 1990 Annual International Conference of Doble Clients.
36. L. van der Sluis, “Transients in Power Systems,” John Wiley & Sons Ltd., 2001.
37. L.F. Blume, G. Camilli, S.B. Farnham and H.A. Peterson, “Transformer Magnetizing Inrush Currents and Influence on System Operation,” AIEE Transactions, Vol. 63, 1944.
38. T.R. Specht, “Transformer Magnetizing Inrush Current,” AIEE Transactions, Vol. 70, 1951.
39. U. Krusi, K. Froehlich and J.H. Brunke, “Controlled Transformer Energization Considering Residual Flux – Implementation and Experimental Results.” Proceedings of IASTED International Conference of Power and Energy Systems, Tampa, Florida, Paper No. 328-143, November 2001.
40. P. Sporn and D.C. Prince, “Ultrahigh-Speed Reclosing of High-Voltage Transmission Lines,” AIEE Transactions, Vol. 56, January 1937.
41. A.C. Boisseau, B.W. Wyman and W.F. Skeats, “Insulator Flashover Deionization Times as a Factor in Applying High-Speed Reclosing Circuit Breakers,” AIEE Trans-actions, Vol. 68, 1949.
42. K. Anjo, H. Terase and Y. Kawaguchi, “Self-Extinction of Arcs Created in Long Air Gaps,” Electrical Engineering in Japan, Vol. 88, No. 4, 1968.
43. G.T. Tretjak, V.V. Kaplan and E.I. Kender, “Free Burning Long Power Arcs in Air,” CIGRE Report No. 324, 1935.
44. A.P. Strom, “Long 60-Cycle Arcs in Air,” AIEE Transactions, Vol. 65, March 1946.

Section 8
122
45. H. Edels, “Properties and Theory of the Electric Arc.” Proceeding IEEE, February 1961.
46. T.E. Browne, “The Electric Arc as a Circuit Element.” Journal of the Electrochemical Society, January 1955.
47. H. Ayrton, “The Electric Arc,” The Electrician, London 1902.
48. C.P. Steinmetz, “Transformation of Electric Power into Light,” Transactions AIEE, Vol. 25, 1907.
49. W.B. Nottingham, “A New Equation for the Static Characteristic of the Normal Elec-tric Arc,” Transaction AIEE, Vol. 42, February 1923.
50. A.R. van C. Warrington, “Reactance Relays Negligibly Affected by Arc Impedance,” Electrical World, September 19, 1931.
51. Relay Systems (textbook by Monseth and Robinson), McGraw-Hill Book Company, New York, 1935.
52. E.T.B. Gross, “Free Burning Long Power Arcs at High Voltage,” Schweizer Arkiv fűr Angewandte Wissenschaft und Technik, Vol. 7, 1941.
53. J.R. Eaton, J.K. Peck and J.M. Dunham, “Experimental Studies of Arcing Faults on a 75 kV Transmission System,” Transaction AIEE, December 1931.
54. L. Edwards, J.W. Chadwick, H.A. Reich and L.E. Smith, “Single-Pole Switching on TVA’s Paradise-Davidson 500 kV Line: Design Concepts and Staged Fault Tests,” IEEE Transactions, PAS-90, No. 6, 1971.
55. R.M. Hasibar, A.C. Legate, J. Brunke and W.G. Peterson, “The Application of High-Speed Grounding Switching for Single-Pole Reclosing on 500 kV Power Systems,” IEEE Transactions, PAS, April 1981.
56. J.G. Kappenman, G.A. Sweezy, V. Koschik and K.K. Mustaphi, “Staged Fault Tests with Single Phase Reclosing on the Winnipeg-Twin Cities 500 kV Interconnection,” IEEE Transactions, PAS-101, No. 3, 1982.
57. A.J. Fakheri, T.C. Shuter, J.M. Schneider and C.H. Shih, “Single Phase Switching Tests on the AEP 765 kV System – Extinction Time for Large Secondary Arc Currents,” IEEE Transactions, PAS-102, No. 8, 1983.
58. R.M. Hasibar and C.W. Taylor, Discussion of reference 57, IEEE Transactions, PAS-102, No. 8, 1983.
59. A.S. Maikopar, “Extinction of an open electric arc,” Elektrichestvo 1960.

References
123
60. W. Rieder, “Plasma and Lichtbogen.” (Book) Friedr. Vieweg & Sohn, Braunschweig 1967.
61. ANSI Std C37.32 – 1996 High Voltage Air Disconnect Switches, Interrupter Switches, Fault Initiating Switches, Grounding Switches, Bus Supports and Accessories, Control Voltage Ranges – Schedule of Preferred Ratings, Construction Guidelines and Specifications.
62. C. Neumann, “Nichtstandardisierte betriebliche Beanspruchungen bein Shalten von Trenn-und Erdungsschaltern in Hochspannangsnetz” (Non-standard operational stresses when switching disconnectors and earthing switches in high voltage networks). PhD thesis, Technischen Hochschule Darmstadt 1992.
63. W. Kaufmann, “Elektrodynamische Eigentümlichkeiten leitender Gase” (Electro-dynamic peculiarities of conducting gas). Ann. d. Phys., 2 1900.
64. M. Kizilcay and T. Pniok, “Digital Simulation of Fault Arcs in Power Systems,” ETEP Vol. 1, No. 1, January/February 1991.
65. A.T. Johns, R.K. Aggarwal and Y.H. Song, “Improved techniques for modelling fault arcs on faulted EHV transmission systems,” IEE Proceedings – Generation, Transmis-sion and Distribution, Vol. 141, No. 2, March 1994.
66. H. Knobloch, “Switching of Capacitive Currents by Outdoor Disconnectors,” Fifth International Symposium on High Voltage Engineering, Braunschweig, August 1987.
67. H. Knobloch: Schaltern kapazitiver Ströme mit Freilufttrennschaltern. (Switching capacitive currents with air-break disconnectors.) Internal report Siemens Schaltwerk Berlin, TVH-VB2716, 1986.
68. E. Acha, A. Semlyen and N. Rajakovic, “A Harmonic Domain Computational Package for Non-Linear Problems and Its Application to Electric Arcs,” IEEE Transactions on Power Delivery, Vol. 5, No. 3, July 1990.
69. H-D. Chiang, C-W. Liu, P.P. Varaiya, F.F. Wu and M.G. Lauby, “Chaos in a Simple Power System,” IEEE Transactions on Power Systems, Vol. 8, No. 4, November 1993.
70. T. Zheng and E.B. Makram, “An Adaptive Arc Furnace Model,” IEEE Transactions on Power Delivery, Vol. 15, No. 3, July 2000.
71. O. Ozgun and A. Abur, “Flicker Study Using a Novel Arc Furnace Model,” IEEE Transactions on Power Delivery, Vol. 17, No. 4, October 2002.
72. D.F. Peelo, R.P.P. Smeets, L. van der Sluis, S. Kuivenhoven, J.G. Krone, J.H. Sawada and B.R. Sunga, “Current Interruption with High Voltage Air-Break Disconnectors.” To be published: Cigre 2004 session.


Annex A
125
Transformer transient recovery voltages
A1. Introduction
Oscillographic traces from actual unloaded transformer field tests show that the transformer transient recovery voltage is a damped low frequency oscillation.15, 19, 22 Two such traces are shown in Fig. 3.7 and Fig. B5. It is known that an unloaded transformer can be represented by a capacitance in parallel with a series RL circuit. However, because of the non-linearity of the core, no one representation will cover all levels of excitation.
A2. Analysis
The unloaded transformer representation can be derived from the factory core loss measure-ment test. In the test, the quantities recorded are: the applied voltage Uo line to ground, the magnetizing current Io (in amperes rms) and the core loss Po. On a single-phase basis, we can write:
o
oo I
UZ = (cos θ + jsin θ)
where cos θ = oo
o
IUP
Zo can now be expressed as:
Zo = Ro +jXo
= Ro + jωLo
The surge impedance Zs is given by:
CL
Z os =
where C is chosen based on experience. The damping factor in turn is given by:
0
s
RZ
=λ
since the R0, L0 and C form a series resonance circuit.
Lastly, the frequency of the oscillation is given by:
CL21F
oπ=

Annex A
126
As will be demonstrated later, the values of Io and Po vary significantly with Uo (level of excitation) and likewise the representation and its characteristics.
Transformer transient recovery voltages cannot be treated theoretically because “standard” transformers do not exist. An empirical approach is necessary and this is done by considering transformers on the BC Hydro system. While the number of transformers on the system is in the many hundreds, the range of ratings at any system voltage level is limited but characteris-tics vary by vintage and manufacturer. A base sample of 230 kV transformers reflecting rating, vintage (1950s to the present) and manufacturer was taken and the transient recovery voltage characteristics were calculated as discussed above. To test the results, smaller sam-ples of 500 kV, 138 kV and 60 kV transformers and the calculations performed. Finally, as a totally independent source, the calculation was done for six transformers rated at 127 kV, 130 kV, 150 kV, 230 kV, 410 kV and 525 kV whose core loss details are given in a CIGRE survey report.AF1 The results of the calculations are plotted in Fig. A1 and can be seen to fit
into a distinct pattern. The lowest damping factor values were 0.77 and 0.78 at 88 and 91 Hz, respectively. All other values were 1 or greater. The calculations also show the following:
1. The damping factor and frequency tends to decrease with increasing system voltage as shown in Figs. A2 and A3.
2. The damping factor and frequency tends to increase with the level of excitation as shown in Figs. A4 and A5.
AF1 E. Colombo and G. Santagostino, “Results of the enquiries on actual network conditions when switching magnetizing and small inductive currents and on transformer and shunt reactor saturation characteristics,” Electra 94, May 1984.
0
50
100
150
200
250
300
350
0 5 10 15 20 25
Damping factor (Lamda)
Freq
uenc
y (H
z) 500 kV transformers230 kV transformers138 kV transformers60 kV transformersCIGRE survey
Fig. A1 Transformer transient recovery voltage characteristics at 100%
excitation

Transformer transient recovery voltages
127
0
5
10
15
20
25
0 200 400 600
System voltage (kV)
Dam
ping
fact
or (L
amda
) BC Hydrotransformer dataCIGRE survey data
Power (BC Hydrotransformer data)Power (CIGREsurvey data)
Fig. A2 Transformer transient recovery voltage damping factor versus
system voltage
0
50
100
150
200
250
300
350
0 200 400 600
System voltage (kV)
Freq
uenc
y (H
z)
BC Hydrotransformer dataCIGRE survey data
Power (BC Hydrotransformer data)Power (CIGREsurvey data)
Fig. A3 Transformer transient recovery voltage frequency versus system
voltage
0
10
20
30
40
50
60
70
80
0 200 400 600
System voltage (kV)
Dam
ping
fact
or (L
amda
)
90%excitation
100%excitation
110%excitation
Linear (90%excitation)
Linear(100%excitation)Power(110%excitation)
Fig. A4 Transformer transient recovery voltage damping factor versus
system voltage with level of excitation as parameter

Annex A
128
0
50
100
150
200
250
300
350
400
450
0 200 400 600
System voltage (kV)
Freq
uenc
y (H
z)
90%excitation
100%excitation
110%excitation
Power (90%excitation)
Power(100%excitation)Power(110%excitation)
Fig. A5 Transformer transient recovery voltage frequency versus system
voltage with level of excitation as parameter
A3. Discussion
Switching unloaded transformers has not attracted a great deal of interest. Field tests are therefore quite rare and published papers on the subject rarer still. Of these papers, only a limited few include actual transient recovery voltage measurements. However, some unpub-lished test data exists and is of value.
During the period 1977 to the present, BC Hydro carried out a number of switching tests on unloaded 500 kV and 230 kV transformers. The oscillographic records from the tests all show a damped oscillation virtually identical to that shown in Fig. 3.7(b) and Fig. B5. In no cases was the underswing greater than 0.3 pu and in no case did the oscillation persist beyond the underswing loop. Published traces by others show a similar result.15, 22 In addition private access to unpublished test results from another major utility in North America also supports the result. The 1.3 pu limit cited in subsection 3.2 is thus based on the best available field test data.
As at least a first approximation Fig. A1 does demonstrate that the transformer transient recovery voltage is a damped oscillation. The lowest damping factors are associated with the lowest oscillation frequencies and comparison to generalized damping curves show that this is the area where an underswing of the order 0.3 pu is possible. For the disconnector gap to be actually stressed at 1.3 pu, the peak of the underswing must coincide with a peak of opposite polarity of the source voltage. For underexcited transformers, conditions may occur where the 0.3 pu value can be exceeded, however the lower applied voltage will provide some compen-sation for the lower damping factor. Similarly the tendency to demand lower and lower core losses may result in values exceeding 0.3 pu.

Annex B
129
EHV transformer switching case study
B1. Introduction
The switching of unloaded EHV transformers with disconnectors is a special case for a num-ber of reasons. Firstly, there are no auxiliary interrupting devices suitable for use at this voltage level and the disconnector must interrupt the magnetizing current through the repeti-tive break-restrike process. Secondly, restriking results in overvoltages and inrush current and it is desirable that some form of control or limitation be exercised over these phenomena. In the latter regard, it is understood that the transformer has a surge arrester connected at its high voltage terminals.
The transformers to be switched are a bank of three single-phase generator transformers each rated at 512.5 kV/13.8 kV, 105.3 MVA and connected wye/delta. The conditions to be met to permit using a 500 kV vertical break disconnector for unloaded switching are:
1. The disconnector should interrupt the magnetizing current before the blade reaches the 45° angle position.
2. Occurrence of restriking should be minimized.
3. Magnitude of restriking overvoltages should not exceed a pre-determined value.
B2. Analysis
As shown already in Annex A, an unloaded transformer is a non-linear circuit. The magnet-izing current can more than double as the excitation voltage goes from 90% to 100% or 100% to 110%. For the low loss 500 kV transformers of today, the magnetizing current is unlikely to exceed 2 A. For the above-noted transformers, the characteristics of the transformer tran-sient recovery voltage (TRV) are (Table B1):
Table B1 Transformer TRV characteristics
Excitation %
Damping factor
Frequency Hz
90 0.93 76 100 1.07 78 110 9.92 132
Using generalized damping curves,1 it can be shown that the maximum voltage across the disconnector after current interruption will be less than or equal to 500 kV at power fre-quency as a first (and reasonable) approximation. With reference to Fig. 3.1, a gap spacing of at least 1 m required corresponding to a blade angle of about 15° (refer to Fig. 3.2).

Annex B
130
The worst case restriking overvoltage will occur if the TRV peak coincides with the peak of opposite polarity of the system voltage. This overvoltage (Um) is given by:
Um = Usm + β (voltage across switch)
where Usm is the system peak voltage to ground and β is the damping factor associated with the restriking current. At 100% excitation, we can write:
Um ≤ 3
25.512 + β (500)
≤ 918 kV peak for β = 1 (no damping)
≤ 2.2 pu
Actual tests on similar transformers indicate that β is in the range 0.5 to 0.75. Using these values, the expected value of Um is in the range 668 kV peak to 793 kV peak or 1.6 pu to 1.9 pu.
From the transformer’s perspective it is desirable that the restriking overvoltages do not exceed a value given by the following:
SIL × 0.75 × 0.85
giving 0.6375 × 1390 = 886 kV peak (2.12 pu in this case).
Natural damping in the restriking circuit would appear to limit the overvoltages to within the desired limit. The influence of the (mandatory) surge arrester will provide further benefit. A 396 kV rated metal oxide arrester will limit the overvoltages to around 1.4 to 1.5 pu.
B3. Mitigation
The purpose of mitigation is to limit the incident of restriking and can be done by using the most suitable disconnector type. The intent is to achieve a contact gap of 1 m in the shortest time possible. This is shown in Table B2. In order of ranking, the best disconnector types to use are: double break, pantograph, vertical break and (lastly) centre break.
Another option used by some utilities is to add insertion resistors as discussed in subsection 2.2.
minimum insulation margin of 15%transformer used test value
transformer as-new switching impulse level

EHV transformer switching case study
131
Table B2 500 kV single-pole disconnector type timing comparison
Disconnector type Opening time*s
Time to 1 m contact gap s
Vertical break 5 – 6 0.64 – 0.76 Double break 4 – 5 0.53 – 0.67 Centre break 4 – 5 1.6 – 2 Pantograph 3 – 4 0.53 – 0.77
* Blade in motion.
B4. Test
The results of an actual test confirmed the conclusions of the analysis and provided further insight into the switching event. The transformer bank described in the analysis was ener-gized and de-energized using a vertical break disconnector. The disconnector was three-pole ganged operated and thus had a very slow opening time. In addition, the disconnector has a long (rod-type) fixed arcing horn such that it takes the blade 3 to 4 seconds to clear the horn. The net effect of the slow blade speed and the fixed horn is to promote prestriking and restriking.
Measurements were made of the prestriking and restriking overvoltages at the transformer terminals using bushing capacitive tap devices. The inrush currents were measured on the neutral for all three single-phase transformer units. Video records were taken of each switch-ing event. Fig. 3.6 is taken from these records.
The cumulative frequency of the prestriking overvoltages is shown in Fig. B1 and that of the restriking overvoltages in Fig. B2. The two plots are very similar indicating that closing is as severe as opening as far as overvoltage magnitude is concerned. Opening, however, resulted in the greater number of overvoltages, on average over 20% more than for closing. This is the expected result because the arcing time on opening is always longer than that during closing. In both cases approximately 10% of the overvoltages are limited by the surge arrester, the highest recorded overvoltage being 1.44 pu.
0
20
40
60
80
100
120
1.02-1.07 1.08-1.13 1.14-1.19 1.20-1.25 1.26-1.31 1.32-1.37 1.38-1.44
Overvoltage factor ranges (pu)
Cum
ulat
ive
frequ
ency
(%)
Positive polarityNegative polarity
Fig. B1 Closing prestriking overvoltage factor distribution

Annex B
132
The distribution of the inrush currents are shown in Fig. B3. While values in excess of 3000 A are possible, the magnitudes are typically less than 1000 A suggesting that the pre-strike or restrike is occurring close to the source voltage peak. Some polarity dependence appears to be in evidence but the number of test shots (eight closes and opens) is probably too
low for proper statistical evaluation. The highest inrush currents occurred in Test 7 and the trace is shown in Fig. B4. Inrush current can be seen to occur at times of 2.3, 2.9, 3.1 and 3.7 s. The other transients on the trace are believed to be crosstalk from restrikes that did not result in inrush current.
The transformer side TRV is shown in Fig. B5. The TRV is of a critically damped nature as was anticipated. The TRV is evident at time 3600 ms and more so following a last restrike at time 3640 ms.
0
20
40
60
80
100
120
0-500 501-1000 1001-1500
Current ranges (A)
Cum
ulat
ive
frequ
ency
(%)
Close positiveClose negativeOpen positiveOpen negative
Fig. B3 Inrush current distribution
0
20
40
60
80
100
120
1.02-1.07 1.08-1.13 1.14-1.19 1.20-1.25 1.26-1.31 1.32-1.37 1.38-1.44
Overvoltage factor ranges (pu)
Cum
ulat
ive
frequ
ency
(%)
Positive polarityNegative polarity
Fig. B2 Opening restriking overvoltage factor distribution

EHV transformer switching case study
133
The remaining parameter of interest is the contact gap spacing at current interruption and at first prestrike. The blade angles at current interruption were determined from the video records and are shown in Fig. B6 because of the high fixed arcing horn, current interruption occurs in the range of blade angle 38° to 50° corresponding to a contact gap range of 800 mm to 2000 m. The largest blade angle of 50° corresponded to the worst case of inrush current shown in Fig. B4. On closing, the first prestrikes always occurred at blade angles of 40° or less (contact gap 1 m or less). Lateral arc reach was insignificant.
0 1 2 3 4 s -2
-1
0
1
2
3kA
GO07I
Fig. B4 Trace showing the highest magnitude of inrush current

Annex B
134
3300 3400 3500 3600 3700 3800 3900 4000ms-0.6-0.4-0.20.00.20.40.6MV
GO08VA
3300 3400 3500 3600 3700 3800 3900 4000ms-0.6-0.4-0.20.00.20.40.6MV
GO08VB
3300 3400 3500 3600 3700 3800 3900 4000ms-0.6-0.4-0.20.00.20.40.60.8MV
GO08VC
Fig. B5 Transformer side TRVs
Fig. B6 500 kV transformer magnetizing current
interruption with vertical break disconnector

EHV transformer switching case study
135
The results of the test support the assertions made in section 3. In summary, these are:
1. The transformer side TRV is a critically damped low frequency oscillation.
2. Comparison of Figs. 3.2 and B6 confirm that the contact gap appears to be the controlling element.
3. The influence of inrush current is primarily to extend the arcing time by its duration which tends to be short at less than 0.5 seconds. This is evident in the higher upper range of interruption angle, Fig. B6 as compared to Fig. 3.2.
4. Prestriking and restriking occur close to the source voltage peak and the associated overvoltages are therefore limited in magnitude.
B5. References
1. A. Greenwood and T.H. Lee, “Generalized Damping Curves and Their Use in Solving Power-Switching Transients,” AIEE Transactions, August 1963.


Annex C
137
Video still images: Figures C1 to C60
Fig. C1
Initial current 24 A
Fig. C2
Initial current 44 A
Fig. C3
Initial current 62 A
Fig. C4
Initial current 82 A
Fig. C5
Initial current 98 A
Fig. C6
Initial current 121 A

Annex C
138
Fig. C7
Initial current 145 A
Fig. C8
Initial current 165 A
Fig. C9
Arc progression from 62 A initial current: time zero
Fig. C10
Arc progression from 62 A initial current: time zero + 100 ms
Fig. C11
Arc progression from 62 A initial current: time zero + 200 ms
Fig. C12
Arc progression from 62 A initial current: time zero + 300 ms

Video still images: Figures C1 to C60
139
Fig. C13
Arc progression from 62 A initial current: time zero + 400 ms
Fig. C14
Arc progression from 62 A initial current: time zero + 500 ms
Fig. C15
Arc progression from 62 A initial current: time zero + 600 ms
Fig. C16
Arc progression from 62 A initial current: time zero + 700 ms
Fig. C17
Arc progression from 62 A initial current: time zero + 800 ms
Fig. C18
Arc progression from 62 A initial current: time zero + 900 ms

Annex C
140
Fig. C19
Arc progression from 62 A initial current: time zero + 1000 ms
Fig. C20
Arc progression from 62 A initial current: time zero + 1100 ms
Fig. C21
Arc decay at 82 A initial current: time zero
Fig. C22
Arc decay at 82 A initial current: time zero + 2 cycles
Fig. C23
Arc decay at 82 A initial current: time zero + 4 cycles
Fig. C24
Arc decay at 82 A initial current: time zero + 6 cycles

Video still images: Figures C1 to C60
141
Fig. C25
Arc decay at 82 A initial current: time zero + 8 cycles
Fig. C26
Arc decay at 82 A initial current: time zero + 10 cycles
Fig. C27
Arc decay at 82 A initial current: time zero + 12 cycles
Fig. C28
Arc decay at 82 A initial current: time zero + 14 cycles
Fig. C29
Arc decay at 82 A initial current: time zero + 16 cycles
Fig. C30
Arc decay at 82 A initial current: time zero + 18 cycles

Annex C
142
Fig. C31
Arc decay at 82 A initial current: time zero + 20 cycles
Fig. C32
Arc decay at 165 A initial current: time zero
Fig. C33
Arc decay at 165 A initial current: time zero + 2 cycles
Fig. C34
Arc decay at 165 A initial current: time zero + 4 cycles
Fig. C35
Arc decay at 165 A initial current: time zero + 6 cycles
Fig. C36
Arc decay at 165 A initial current: time zero + 8 cycles

Video still images: Figures C1 to C60
143
Fig. C37
Arc decay at 165 A initial current: time zero + 10 cycles
Fig. C38
Aberrant arc behaviour at 103 A initial current: time zero front image
Fig. C39
Aberrant arc behaviour at 103 A initial current: time zero + 2 cycles front image
Fig. C40
Aberrant arc behaviour at 103 A initial current: time zero + 4 cycles front image
Fig. C41
Aberrant arc behaviour at 103 A initial current: time zero + 6 cycles front image
Fig. C42
Aberrant arc behaviour at 103 A initial current: time zero side image

Annex C
144
Fig. C43
Aberrant arc behaviour at 103 A initial current: time zero + 2 cycles side image
Fig. C44
Aberrant arc behaviour at 103 A initial current: time zero + 4 cycles side image
Fig. C45
Aberrant arc behaviour at 103 A initial current: time zero + 6 cycles side image
Fig. C46
Aberrant arc behaviour at 103 A initial current: arc transfer to disconnector blade
Fig. C47
Interrupting 24 A with loop impedance 40 ohms
Fig. C48
Interrupting 23 A with loop impedance 100 ohms

Video still images: Figures C1 to C60
145
Fig. C49
Interrupting 21 A with loop impedance 200 ohms
Fig. C50
Interrupting 29 A with loop impedance 150 ohms
Fig. C51
Interrupting 75 A with loop impedance 20 ohms
Fig. C52
Interrupting 73 A with loop impedance 40 ohms
Fig. C53
Interrupting 69 A with loop impedance 70 ohms
Fig. C54
Interrupting 70 A with loop impedance 100 ohms

Annex C
146
Fig. C55
Interrupting 98 A with loop impedance 40 ohms
Fig. C56
Interrupting 96 A with loop impedance 100 ohms
Fig. C57
Interrupting 90 A with loop impedance 150 ohms
Fig. C58
Interrupting 121 A with loop impedance 60 ohms
Fig. C59
Interrupting 124 A with loop impedance 150 ohms
Fig. C60
Interrupting 122 A with loop impedance 200 ohms

Annex D
147
Auxiliary interrupting devices and capacitive currents
D1. Introduction
Whip-type auxiliary interrupting devices are applied on disconnectors to provide an enhanced line dropping capability. A less common so-called rigid arm device has also been used for this purpose (Fig. D1). This device consists on a hinged actuating arm attached to the discon-nector jaw assembly. As the blade opens, a latch attached to the blade lifts the actuating arm and charges a torsion spring mechanism. When the blade reaches a predetermined open contact gap, the latch releases the actuating arm and the arm and the blade now move in opposite directions just achieving current interruption. These devices tend to have lower tip velocities than the whip type devices.
Fig. D1 Rigid arm device
Note: this device is not one of the devices of Tables D3 and D4 Courtesy of Pacific Air Switches Corporation
In Fig. D2 still images are shown of a 115 kV pole-mounted vertical break disconnector switching out a line length of about 14 km. The charging current is 3.3 A. The arc can be seen to be solid but quite convoluted and the current is interrupted after the blade passes the 45° angle position. Note also that the restrike follows along the previous arc channel and that hot gas persists momentarily after current interruption. The total arcing time is about 1.5 seconds.
In Fig. D3 a whip-type device is applied to the same disconnector and the same line length switched out. A momentary arc is drawn on all three phases with that on the centre phase being the longest. No restrikes occurred and the blade at current interruption is about 45°. The total arcing time is less than 0.25 seconds.

Annex D
148
Contact parting
Fig. D2 115 kV vertical break disconnector interrupting line charging current of 3.3 A (continued) Courtesy of Bonneville Power Administration

Auxiliary interrupting devices and capacitive currents
149
Restrikes near and far phases
Restrikes all phases
Current interruption: note hot gas remnants
Fig. D2 115 kV vertical break disconnector interrupting line charging current of 3.3 A Courtesy of Bonneville Power Administration

Annex D
150
Just prior to whip release
Arc follows whip tip trajectory
Current interruption
Fig. D3 115 kV vertical break disconnector (as in Fig. D2) equipped with whip-type device interrupting line charging current of 3.3 A Courtesy of Bonneville Power Administration
These devices cannot be described as precision current interrupting devices being dependent on the geometry of the set-up among other variables. Tests run on the same device and the same current levels in different laboratories will not necessarily yield the same results. Labo-ratory tests performed by two utilities demonstrates this varying performance as does actual experience in the field.
D2. Laboratory tests
Allegheny Power Service Corporation ran a series of tests on two whip-type and two rigid arm type devices.DF1 The devices were intended for use on 115 kV disconnectors. The results of the tests are given in Tables D1 to D4.
DF1 T.J. Jackson, “138 kV Air Switch Interrupting Device Tests.” Presented at PEA Electrical Equipment Meeting, Hershey, Pennsylvania, May 1977.

Auxiliary interrupting devices and capacitive currents
151
Table D1 Whip-type device 1
Voltage kV
CurrentA Failures/Shots Average arc length
m 64* 4.7
6.2 9.2
11.0 12.2 13.5 15.7 23.7 27.1 32.7 39.9
0/20 0/20 0/20 0/20 0/19 0/20 0/20 0/20 0/20 0/20 0/20
< 0.3 < 0.3 < 0.3 < 0.3 < 0.3 < 0.3 < 0.3 < 0.3 < 0.3 < 0.6 < 1.5
105* 7.9 10.6 15.0 20.8 24.3 31.0
0/20 1/20 0/20 3/20 0/20 5/7
< 0.3 < 0.6 < 0.9 < 0.9 < 1.5 < 1.8
78.7‡ 3.6 7.2
0/5 0/5
< 0.9 < 0.9
80‡ 6.2 6.2
17.6
0/10 0/3 0/2
< 0.3 < 0.3 < 0.6
* Single-phase laboratory tests. ‡ Three-phase field tests.

Annex D
152
Table D2 Whip-type device 2
Voltage kV
CurrentA Failures/Shots Average arc length
m 64* 4.7
6.2 9.2
11.0 12.2 13.5 15.7 23.7 27.1 32.7 39.9
0/20 0/20 0/20 0/20 0/20 0/20 0/20 0/20 0/20 0/20 0/23
< 0.3 < 0.3 < 0.3 < 0.3 < 0.3 < 0.3 < 0.3 < 0.3 < 0.6 < 0.6 < 0.6
105* 7.9 10.6 15.0 20.8
1/20 2/24 4/20
10/20
< 0.6 < 0.6 < 0.6 < 0.6
78.1‡ 78.3
3.6 7.2
0/10 0/10
< 0.6 < 0.6
80‡ 6.2 17.6 6.2
0/10 1/2 0/3
< 0.3 < 0.6 < 0.3
* Single-phase laboratory tests. ‡ Three-phase field tests.
Table D3 Rigid arm type device 1
Voltage kV
CurrentA Failures/Shots Average arc length
m 64* 4.7
6.2 9.2
11.0 12.2 13.5 15.7 18.3
0/20 0/20 0/20 0/20 1/20 3/20 1/20 4/20
< 0.3 < 0.6 < 0.6 < 0.6 < 0.9 < 0.9 < 0.9 < 1.2
105* 7.9 5.0
6/7 2/2
- -
* Single-phase laboratory tests.

Auxiliary interrupting devices and capacitive currents
153
Table D4 Rigid arm type device 2
Voltage kV
CurrentA Failures/Shots Average arc length
m 64* 9.2
13.5 15.7 18.3 20.4 23.7 27.1 32.7 39.9
0/20 0/20 0/20 0/20 0/20 0/20 0/20 0/20 0/20
< 0.3 < 0.9 < 1.2 < 1.2 < 1.5 < 1.2 < 1.5 < 1.5 < 1.5
105* 15.0 10.6 7.9
9/20 9/15 9/20
< 1.2 < 1.2 < 1.2
* Single-phase laboratory tests.
Failure in the test means that the auxiliary interrupting device has not interrupted the current by the time it reaches its neutral position. For the whip-type device, this is parallel to the blade and, for the rigid arm device, its rest position. Whip-type device 1 was judged to offer the best potential performance and suitable for dropping 138 kV lines up to 64 km in length (approximately 20 A) without exceeding a limiting arc length of 0.9 m. A disconnector with arcing horns only was considered suitable for dropping 138 kV lines up to about 6 km in length (approximately 2 A – refer to Fig. 4.1).
BPA conducted a series of laboratory tests on a single-phase 115 kV vertical break discon-nector with various auxiliary interrupting devices (termed as quick break devices).DF2 Failure was defined as discussed above and the results are summarized in Table D5. BPA ranked per-formance based on the current level at which the device first showed marginal performance and it is interesting to note that these are generally much lower than those of the Allegheny Power laboratory tests (the BPA test voltage was 84 kV). Whip #5 was actually the same whip-type device as tested in 1972 and exhibited approximately one-half the earlier test result at about the same voltage. This result tends to support actual field experience with the device as noted in subsection 2.3 and discussed below.
DF2 BPA Division of Laboratories: Laboratory Report ELE-89-39, “Tests to Determine the Interrupting Capabilities of 115 kV Quick Break Devices.” March 1989.

Annex D
154
Table D5 BPA test results for various auxiliary interrupting devices
Device type Suitable to switchcurrents less than
A
Drop 115 kV linelengths less than
km Whip #1 3 12 Rigid arm #1 5.4 21 Whip #2 5.5 22 Rigid arm #2 7.3 29 Whip #4 8 32 Whip #5 9 36 Whip #6 11 44
The difference in performance of the same device in two separate laboratory tests cannot be definitively explained. Both tests were run on a single-phase basis using variable shunt capacitor banks as the load circuit. Some variation can be expected in the mounting of the device but this is not considered sufficient to explain the difference.
The field tests on the whip-type device 1 in Table D3 are more indicative of performance. As installed, the device protrudes beyond the jaw assembly by about 70 cm. This can be viewed as increasing the effective blade length and, with reference to Fig. 4.2 for a disconnector at 145 kV, gives an equivalent minimum blade angle for current interruption at less than 15°. This in turn gives a minimum gap spacing in the expected range. However, the average arc lengths in one case were recorded as being less than 0.9 m for currents of 3.2 A and 7.2 A. This is equivalent to about the minimum gap spacing for a 245 kV disconnector and to a neutral blade position of about 30° on a 145 kV disconnector. This suggests therefore that, to interrupt the current by a neutral blade position of 45°, the allowable current is in the range close to 7.2 A.
D3. Field experience
Experience with whip-type devices has shown a clear dependency on phase spacing. The devices are most commonly used for line dropping at 72.5 kV and 145 kV. Field data from various utility sources for a particular device applied at 115 kV and 138 kV is given in Table D6.

Auxiliary interrupting devices and capacitive currents
155
Table D6 Field data for whip device at 138 and 115 kV
Current (A) to be interrupted Source Voltage
kV Phase spacing
m Successful Failed Supplier 132
138 138
Unknown 10.25 24
11−17.6
- - -
Utility 1 138 3 3
2.13
13 - -
- 15.3 9.6
Utility 2 138 3.66 1.92 - Utility 3 138 Unknown 7.2 - Utility 4 138 2.13 - 9.6 Utility 5 115 3 - 16
A further complication is the weather: devices which perform well in dry weather fail in wet or very humid conditions. This is believed to be due, at least in part, to increased current caused by leakage across line insulators and corona losses.


Annex E
157
Comparative analysis of loop switching tests by Andrews, Janes and Anderson
E1. Introduction
Andrews et al5 conducted their loop switching tests in July 1945 and November 1946 and the combined results are shown in Fig. 2.7. The test data points – initial currents, loop imped-ances, arcing times, arc lengths and open circuit voltages – are given by Gerngross11 thus enabling a detailed analysis and comparison to the Powertech loop switching test results from February and May 2000.
E2. Comparison
The scope of the two test series is shown in Fig. E1. Andrews et al conducted their tests over a narrow range of loop impedance, necessarily so because transmission lines were used to achieve the impedance values, and a current range of 60 A to 312 A. The Powertech tests
were run in a high power laboratory and greater flexibility with respect to impedance and current was possible. The common area is for impedances less than 50 ohms and currents greater than 60 A.
The test series are first compared for consistency. The Powertech test results are shown in Fig. E2 and indicate good agreement between arcing times and therefore consistent results. Fig. E3 shows the Andrews et al test points and only three points are common to both test times. The results associated with these are given in Table E1. The points show a reasonable consistency. However, the arcing times are remarkably short and the arc lengths remarkably long and is discussed further later.
0
50
100
150
200
250
300
350
0 50 100 150 200 250
Loop impedance (ohms)
Initi
al c
urre
nt (A
)
All Powertech testsAndrews et al tests
Fig. E1 Scope of Andrews et al and Powertech test series

Annex E
158
0
20
40
60
80
100
120
140
160
0 50 100 150 200 250
Loop impedance (ohms)
Initi
al c
urre
nt (A
)
February: arcing time <=1s
May: arcing time <=1s
February: arcing time 1 to2.5s
May: arcing time 1 to 2.5s
Pow er (February: arcing time<=1s)
Pow er (May: arcing time<=1s)
Pow er (February: arcing time1 to 2.5s)
Pow er (May: arcing time 1 to2.5s)
Fig. E2 Comparison between Powertech February and May 2000 test results
0
50
100
150
200
250
300
350
0 10 20 30 40 50
Loop impedance (ohms)
Initi
al c
urre
nt (A
)
Test points: July 1945
Test points: November1946
Fig. E3 Comparison between Andrews et al July 1945 and November 1946 test
points
Table E1 Andrews et al common test points
Test time Quantity
July 1945 November 1946 Initial current (A) 242 238 249 Loop impedance (ohms) 24.5 24.9 23.8 Arcing time (s) 0.38 0.45 0.29 Arc length (m) 7.3 8.9 10

Comparative analysis of loop switching tests by Andrews, Janes and Anderson
159
The next comparison is to check for expected variations between the parameters of initial current, loop impedance and arcing time. Both test series exhibit the expected variation of increasing arcing with increasing loop impedance for constant current as shown in Figs. E4 and E5. Note, however, the large difference in arcing time.
0
500
1000
1500
2000
2500
3000
0 100 200 300
Initial current (A)
Arc
ing
time
(ms)
6 ohms loopimpedance
10 to 16 ohms loopimpedance
20 to 40 ohms loopimpedance
Linear (6 ohms loopimpedance)
Linear (10 to 16ohms loopimpedance)Linear (20 to 40ohms loopimpedance)
Fig. E4 Powertech test results
0
100
200
300
400
500
600
700
800
900
1000
0 100 200 300 400
Initial current (A)
Arc
ing
time
(ms)
11 to 18 ohms loopimpedance
22 to 30 ohms loopimpedance
31 to 43 ohms loopimpedance
Linear (11 to 18ohms loopimpedance)Linear (22 to 30ohms loopimpedance)Linear (31 to 43ohms loopimpedance)
Fig. E5 Andrews et al test results
Arc length and arc reach are compared in Fig. E6. The arc lengths are those given by Gerngross and the arc reaches are based on the statement in the reference that the arc reaches never exceeded half the arc length.5 Arc reach as defined by Andrews et al can be in any direction and can be directly compared to the horizontal reaches from the Powertech data.

Annex E
160
The difference between the reaches is quite extraordinary, all the more so given that Andrews et al tests were run on a 33 kV disconnector with an open gap of probably no more than 0.5 m. Observation of the Powertech test arcs, particularly those at the higher currents, shows that the arc tends to be limited by an apparent balance between the magnetic force driving the arc outward and partial arc collapses, and of course the diminishing rate of increase of power input – refer to Fig. 5.14.
E3. Conclusions
The difference in the results between the two test series, performed some fifty years apart, is significant. In Fig. E7 measured arc reaches for three cases at 70 ohms loop impedance from the Powertech tests are compared to values calculated using Eqns. (2.2) and (2.3) as follows.
0
2
4
6
8
10
12
14
0 100 200 300 400
Initial current (A)
Arc
leng
th o
r ar
c re
ach
(m)
Andrews et al: arclength
Andrews et al:maximum arc reach
Powertech:horizontal arc reach
Linear (Powertech:horizontal arcreach)Linear (Andrews etal: maximum arcreach)Linear (Andrews etal: arc length)
Fig. E6 Comparison of arc reach or length for Andrews et al tests versus
Powertech tests
0
0.5
1
1.5
2
2.5
3
3.5
4
0 1 2 3 4
Horizontal reach (m)
Vert
ical
reac
h (m
)
33 A Powertechreach69 A Powertechreach103 A Powertechreach33 A Andrewsreach69 A Andrewsreach103 A Andrewsreach
Fig. E7 Measured Powertech arc reaches versus calculated Andrews et al arc
reaches for a loop impedance of 70 ohms

Comparative analysis of loop switching tests by Andrews, Janes and Anderson
161
33 A and 70 ohms:
LPRl = 5.03 × 70 × 332 × 10-3 = 383 mm
69 A and 70 ohms:
LPRl = 5.03 × 70 × 692 × 10-3 = 1676 mm
103 A and 70 ohms:
LPRl = 0.503 × 70 × 103 = 3626 mm
The plot compares the actual arc reach direction for the Powertech tests against the locus of the possible reach directions for the calculated points. At 33 A, the calculated reach is lower than the actual reach and at 69 A and 103 A the calculated reach is greater to much greater than the actual reaches. The question is: What is the reason for the difference in the arc reaches between the two test series?
To answer that question one possible theory is that the differing circuit arrangements causes the difference. The Powertech circuits used reactors, while the Andrews et al tests used transmission line loops. The latter loops were not pure impedances but incorporated trans-formation: from 33 kV to 12 kV in the series circuit and 12 kV to 132 kV and then 132 kV to 33 kV in the parallel circuit. It is difficult to judge the exact influence of transformation beyond adding a lumped impedance but it is implausible it could impact on arc development and propagation.EF1
A more probable theory is that the arc was somehow drawn out rapidly in a horizontal direc-tion. Gerngross11 in his thesis shows a photograph (unfortunately an unclear photograph) of a device described as “arc measuring device used for drawing arc out horizontally.” This theory is credible when we recall that the tests were based on the premise of a critical arc length to achieve current interruption. The arc length then became the issue and artificially drawing it out introduces an element of forced commutation, rather than natural commutation of current to the parallel circuit. This would explain the long arcs and the short arcing times but absolute proof, however, is not forthcoming.
EF1 McNulty29 advocated that transformation could be treated simply as a series impedance. However, many utilities do not permit loop switching where transformation is involved no doubt based on bad experience with the practice.


Annex F
163
Influence of weather
F1. Introduction
No studies have been conducted of weather as it relates to current interruption using air break disconnectors. The weather element of most interest is that of wind and that will be the main focus of this annex. Temperature, humidity and air pressure are viewed as more relevant to static air gap considerations than to the dynamic conditions associated with arcs.FF1 With regard to heat transfer, air temperature is not significant compared to the arc temperature and the high differential promotes heat transfer from the arc to the ambient air.
F2. Literature
Weather is mentioned in a number of the references discussed in section 2. Warrington50 notes that wind can have the effect of drawing out the arc to even longer lengths and states:
Besides the effect of increasing length the arc resistance is further raised by the cooling effect of the wind which causes deionization and reduction in cross-section of the arc.
This statement appears, however, to be speculation rather than a proven fact. Andrews et al5 describe their experience with wind during transformer magnetizing current and loop switching tests:
It was observed that wind conditions greatly affected the shape of an arc and its direction but did not appreciably affect its length. With light wind it tended to be very irregular and circuitous. With strong wind it tended to be blown out horizontally windward, often like an elongated “V.”
This statement in part contradicts Warrington’s speculation and, in fact, the loop switching tests performed at Powertech Laboratories tend to support these observations.
Anderson15 conducted his magnetizing current interruption tests under varying weather conditions:
Weather conditions were adverse, it was cold and windy with showers of mixed rain and snow.
Anderson noted further that the maximum contact gap at current interruption was about 600 mm. This compares well with the calculated values of Fig. 3.2 for a 230 kV disconnector.
The CEA report9 also discusses weather but mainly in the context of the above references.
FF1 Barrett and Green (see subsection 4.4) in their experiments tracked these quantities but found no correlation to arc reach.

Annex F
164
F3. Discussion
Wind can be expected to have an influence on arcs in air because it enhances heat transfer. The influence, whether the arc is thin as in Fig. 4.8(p) or voluminous as in Fig. C59, is to increase the power loss and thus promoting arc collapse and current interruption.
Filter and Amm conducted capacitive current interrupting tests on live line connectors at 115 kV and 230 kV.FF2 The range of current was 0.42 to 1.38 A at 115 kV and 0.1 to 0.83 A at 230 kV. Wind velocity was recorded during the tests and treated on the following basis: no wind was defined as wind velocity less than 6.5 km/hour and wind as wind velocity greater than 6.5 km/hour. The wind condition resulted in the shorter arc reaches. At 1 A, the wind reach was about 60% of that with no wind and at 0.5 A the wind reach was about 50% of that with no wind. The report concluded that about 0.5 A could be interrupted by the connectors without excessive reach.
The loop switching tests on the 230 kV disconnector at Powertech Laboratories were run in November 1999, February 2000 and May 2000. The weather for the latter two test series was fair with little or no wind, while the weather for the November test series was a storm with high winds gusting at times. No record was kept of wind velocities, which varied anyway from test shot to test shot, but it is reasonable that on average the test condition was one of wind as compared to no wind. The November tests were in the approximate current ranges 20 A to 30 A and 50 A to 60 A and varying loop impedances. The results with arcing time as parameter are plotted in Fig. F1 together with the results for the same ranges of current from the later no wind tests. For the same arcing time ranges there is a shifting to the right for the wind condition particularly in the lower current range. This is demonstrated more explicitly
FF2 R. Filter and D.E. Amm, “115 kV and 230 kV Arc Reach Tests at Kleinburg Outdoor Test Facility.” Ontario Hydro Research Division (now Kinectrics Inc.), Report No. 90-146-K, August 1990.
0
10
20
30
40
50
60
70
0 200 400 600
Loop impedance (ohms)
Initi
al c
urre
nt (A
)
Wind: arcing time <=500ms
Wind: arcing time 501-1000msWind: arcing time 1001-1500msNo wind: arcing time<=500msNo wind: arcing time 501-1000msNo wind: arcing time 1001-1500ms
Fig. F1 Initial current versus loop impedance for conditions of wind and no wind

Influence of weather
165
in Fig. F2: only the points for the arcing time of 501 to 1000 ms are plotted and loop imped-ances are limited to common values. The regression shows that the wind condition is more favourable to current interruption.
F4. Conclusions
Wind can have a positive effect on the interruption of current in air. However, it may promote movement of the arc which increases the risk for contact with adjacent phases or grounded structures. Operators should exercise discretion before opening disconnectors to break circuits under wind conditions.
0
10
20
30
40
50
60
70
0 100 200 300
Loop impedance (ohms)
Initi
al c
urre
nt (A
) Wind: arcing time 501-1000ms
No w ind: arcing time 501-1000ms
Linear (Wind: arcing time501-1000ms)
Linear (No w ind: arcingtime 501-1000ms)
Fig. F2 Initial current versus loop impedance for conditions of wind and no wind
and arcing time 501 to 1000 ms


167
ACKNOWLEDGMENTS
I am greatly indebted to Prof. dr. R. Smeets for accepting me as a promotion candidate. I am further indebted to him and the other members of the Core Promotion Committee, Prof. L. van der Sluis, Prof. G. Damstra and Prof. dr. H-H. Schramm for their advice and encour-agement during the work.
I want to particularly thank J.G. Krone, Managing Director, HAPAM B.V. for providing high voltage disconnectors for the tests run at KEMA and of course KEMA for providing the test time. My thanks also to Dr. P. Schavemaker and S. Kuivenhoven, TU Delft for their interest, ideas and help with the MATLAB work.
I am further grateful to many others who supported the work in one form or other: to R. Threlkeld, Senior Vice-President, BC Hydro T&D (now retired) and G. Smyrl, Vice-President, BC Hydro for approval to use the Powertech and other test data; to Dr. J. Brunke and S. Lowder, Bonneville Power Administration, for sharing BPA practices and providing video clips; to J. Shipek and M. Clifton of Puget Sound Energy for the line dropping video tapes; to Dr. H. Knobloch, Siemens AG, for his report on capacitive current switching; to Drs. W. Chisholm and J. Kuffel of Kinectrics Inc. (formerly Ontario Hydro Research) for reports on past studies for Ontario Hydro; to Dr. J. Chand, Manitoba Hydro, for providing experiences with auxiliary interrupting devices; to A. Crino, Pacific Air Switches Corpora-tion, for information on disconnectors and auxiliary interrupting devices; to M. Alexander, P. Gillan, J. Sawada and B. Sunga, BC Hydro, for reviewing various drafts; to P. Crawford, V. Bright, R. Tennant and A. Wong, BC Hydro Information Centre, for the literature searches and references; to B. Avent for the Powertech video images; and to B. Sunga and M. Hogg for drafting various figures.
Lastly, I express my sincere thanks to Sandra Giasson for the word processing of this thesis and her endless patience through the many changes and drafts.

168
CURRICULUM VITAE
David Peelo was born on 28 February 1943 in Dublin, Ireland. After completing high school, he studied electrical engineering at University College Dublin and graduated cum laude in 1965. His first employment was at the ASEA High Voltage Laboratory in Ludvika, Sweden. In 1973 he joined BC Hydro in Vancouver, British Columbia, Canada eventually becoming a switchgear and switching specialist. He took early retirement in 2001 to pursue a new career as an independent consultant and to undertake postgraduate work as represented by this thesis. He is active in Cigre, IEC and IEEE committees and working groups and has authored or coauthored over 40 technical papers.