Embed Size (px)
Citation preview

Research ArticleLow-Frequency Performance Analysis of Semi-Active CabrsquosHydraulic Mounts of an Off-Road Vibratory Roller
Vanliem Nguyen 12 Jianrun Zhang 3 and Xiuzhi Yang1
1School of Mechanical and Electrical Engineering Hubei Polytechnic University Huangshi China2Faculty of Automotive and Power Machinery Engineering ai Nguyen University of Technology ai Nguyen Vietnam3School of Mechanical Engineering Southeast University Nanjing China
Correspondence should be addressed to Vanliem Nguyen xuanliem712gmailcom
Received 15 November 2018 Revised 31 December 2018 Accepted 27 January 2019 Published 17 April 2019
Academic Editor Gabriele Cazzulani
Copyright copy 2019 Vanliem Nguyen et al is is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work isproperly cited
To improve the ride comfort of the off-road vibratory roller the cabrsquos hydraulic mounts were analyzed to prevent vibration sourcestransmitting to the cab However the cabrsquos low-frequency shaking in the vertical direction and the direction of forward motion isstill great is study proposes an optimal fuzzy-PID control method for semi-active cabrsquos hydraulic mounts based on an off-roadvehicle roller dynamic model to analyze the low-frequency performance of semi-active cabrsquos hydraulic mounts under the differentoperating conditions In order to evaluate the ride comfort of the off-road vibratory roller with semi-active cabrsquos hydraulicmounts the power spectral density (PSD) and the weighted root mean square (RMS) of acceleration responses of the verticaldriverrsquos seat cabrsquos pitch and roll vibrations in the low-frequency range are chosen as objective functions Contrastive analysis oflow-frequency vibration characteristics of the off-road vibratory roller with passive cabrsquos hydraulic mounts semi-active cabrsquoshydraulic mounts without optimization and semi-active cabrsquos hydraulic mounts with optimization is respectively carried oute research results show that the semi-active cabrsquos hydraulic mounts with optimization have an obvious effect on mitigating thecab shaking and improving the ride comfort in comparison with passive cabrsquos hydraulic mounts and semi-active cabrsquos hydraulicmounts without optimization
1 Introduction
e vibratory roller plays an important in the field of theconstruction project on roads railways airports and so onere is a combination of the static force of the vehicle self andthe dynamic force of the vibratory drum yielded by an eccentricmass rotating around the drum axis to compact soil asphaltand other materials in its work process us the vehiclersquosvibration dynamics were mainly generated by the wheels-deformable terrain interaction in the condition of the vehi-cle traveling and the drumtyres-elastoplastic terrain in-teractions in the condition of the vehicle working [1ndash4] einteraction model between the tyre and soft soil ground hadbeen applied for researching the effect of soil deformation onoff-road vehicle ride responses [5 6] e dynamic pressure-sinkage relationship of a smooth rigid wheel-terrain interactionmodel was also studied [7] Besides the effect of the random
terrain surfaces on earth-movingmachineryrsquos ride comfort hadbeen researched via the wheels-soil contact model [6 8] Allresearch results indicated that the vibration responses of in-teractive models were strongly affected by the off-road de-formed terrains
Consequently the vibratory rollerrsquos ride comfort wasresearched via the interaction model between wheels and off-road terraine influence of design parameters of passive cabrsquosrubber mounts (PRMs) on the ride dynamics of a soil com-pactor was studied via experiment and simulation [9] and thePRMrsquos parameters were then optimized to improve the ridecomfort [10] e research results showed that the vibrationresponses of the vertical driverrsquos seat and cabrsquos pitch weregreatly affected under various operating conditions Becausethe low-frequency excitation arising from the wheels-terraininteraction is mostly transmitted to the cab and the driverrsquos seatthrough PRM and seatrsquos suspension the vibration responses in
HindawiShock and VibrationVolume 2019 Article ID 8725382 15 pageshttpsdoiorg10115520198725382
the low-frequency range of 05ndash10Hz caused by terrain surfaceroughness can lead to the main risk factors which seriouslyaffect the driverrsquos mental and physical health [11] ereforethe PRM is difficult to satisfy the driverrsquos ride comfort underthe low-frequency excitation region of off-road terrain
e vibratory roller cabrsquos isolation system is one of themost important factors to improve the driverrsquos ride comfortA 3D nonlinear dynamic model of an off-road vibratoryroller equipped with three different cabrsquos isolation mountsincluding the PRM the passive hydraulic mounts (PHMs)and the pneumatic mounts was studied via the simulationand experimental investigations to investigate the vehiclersquosride comfort in a low-frequency region [1] e resultsshowed that the low-frequency and high-stiffness charac-teristics of the PHM have a good effect on isolating low-frequency vibration transmitted and controlling the cabshaking of the vibratory roller However the vertical driverrsquosseat and cabrsquos pitch vibrations were still great under oper-ating conditions according to ISO 2631-11997 [12]erefore research and control of the semi-active cabrsquoshydraulic mounts (SHMs) of the vibratory roller to enhancethe ride comfort is necessary
Nowadays the combined control methods such as theneural-PID control fuzzy-PID control and integratedfuzzy-wheelbase preview control [13ndash15] were stronglydeveloped for controlling the magnetorheological fluid ofthe semi-active suspension systems [16ndash18] In order toenhance the control performance the optimal controlmethods such as neuro-fuzzy control with the fuzzy rulesoptimized by the genetic algorithm [19] fuzzy-PID controlwith the control rules optimized by cultural algorithm [20]and fuzzy-skyhook control using the multiobjectivemicrogenetic algorithm [21] were also successfully appliede research results showed that the optimal controlmethods were better than without optimization Howeverall the above research studies mainly investigate the per-formance of the control methods thus the quarter carmodels are mostly used for all research studies In additionthe above combined control methods have not yet beenconsidered and applied for the SHM of the vibratory rollererefore researching an optimal control method for theSHM to enhance further the off-road vibratory rollerrsquos ridecomfort is necessary
In this study based on a three-dimensional nonlineardynamic model of the off-road vibratory roller equipped withPHM [1] an SHM using the magnetorheological fluid withadjustable damping is then developed An optimal fuzzy-PIDcontrol method in which the fuzzy control rules optimized bythe genetic algorithm program is applied to optimize thecontrol force of the SHM e performance of SHM withoptimization for the ride comfort and the health of the driveris then evaluated through the power spectral density (PSD)and weighted root mean square (RMS) acceleration responsesof the vertical driverrsquos seat cabrsquos pitch and roll vibrations inboth the frequency and time domains under actual operatingconditions of the off-road vibratory roller
e innovation in this paper is that an 11-DOF vehicledynamics model which can fully reflect the pitch and roll ofthe cab is concerned under the various operating conditions
A new optimal method of the fuzzy control rules based onthe genetic algorithm which is known as a multiobjectiveoptimal algorithm with wide search range and short searchtime is successfully developed and applied for the optimalfuzzy-PID controller e two evaluation methods includingthe evaluation method of the vibration effect to the driverrsquosride comfort via the weighted RMS acceleration response inthe time region and the evaluation method of the vibrationeffect to the health and safety of the driver via the PSDacceleration responses in the low-frequency region arecarried out e vibration responses of the vibratory rollerunder low-frequency excitation of the off-road terrainground especially the pitch and roll vibration response ofthe cab with PHM SHM without optimization and SHMwith optimization are respectively simulated and analyzede results show that the low-frequency and high-stiffnesscharacteristics of SHM with optimization have a good effecton isolating low-frequency vibration transmitted and con-trolling the cab shaking of the vibratory roller
2 Vibratory Roller Dynamic Models
21 Modeling of the Off-Road Vibratory Roller DynamicBased on a three-dimensional nonlinear dynamic model ofthe off-road vibratory roller [1] as shown in Figure 1(a) thebasic structure of the vibratory roller consists of the rigiddrumtires the frontrear vehicle frame the cab and theseat e cab is connected with the rear frame via the cabrsquosisolation mounts which contain PRM PHM or SHM asshown in Figures 1(b)ndash1(d) respectively
A three-dimensional nonlinear dynamic model witheleven-DOF of a single drum vibratory roller and the cabrsquosisolation mount models are built as in Figures 2(a) and 2(b)
In Figure 2(a) zs represents the vertical motion at thedriverrsquos seat zc ϕc and θc are the vertical the pitch and theroll motions at the cab respectively and those are describedas zrf ϕrf and θrf at the rear vehicle frame e vertical androll motions of the front frame and the drum are described aszff θff and zd θd zsej and ztj are the vertical motion of thedeformable terrain under the drum and the tyres e massof the driver the cab the front frame the engine the rearframe and the roller drum is described as ms mc mff mrfand md respectively Fci is the vertical dynamic forcesgenerated by the cabrsquos isolation mounts (i 1ndash 4) qtj and qdjare the off-road terrain roughness surface at tyres and drumcontacts
Based on the dynamic model of the vibratory roller andoff-road terrains interaction as shown in Figure 2(a) andthe motion equations of the driverrsquos seat cab frontrearvehicle frame and wheels-deformable terrains interaction[1] the motion equations of the off-road vibratory roller canbe represented in the matrix form as follows
[M] euroZ1113966 1113967 +[C] _Z1113966 1113967 +[K] Z F(t) (1)
where [M] [C] and [K] are (mtimesm) mass damping andstiffness matrices respectively Z is the (mtimes 1) displace-ment vector F(t) is the (mtimes 1) exciting force vector andmis the number of DOF (m 11)
2 Shock and Vibration
22 Mathematical Model for the Cabrsquos Isolation MountsBoth the PRM and the PHM as plotted in Figures 1(b) and1(c) and their lumped parameter models described as inFigure 2(b) were studied via the simulation and experiment[1] Herein kr and cr are linear stiness and damping co-ecient of the main rubber mount and a liquid dampingforce fd ch| _z| _z is expressed as the damping characteristic
of a quadratic nonlinearity in which ch is the dampingconstant of the hydraulic mount
In addition a new model of SHM for the vibratory rollerbased on the PHM is proposed in this study e basicstructure of an SHM includes a main rubber a dampingplate driven by the bolt and a closed chamber lled with theuid However the uid used in the closed chamber is a
13
Cab
WheelRear frame DrumFront frame
Fc
zc
z
Rear frame
Fczf
X
Y
Z
To frameRubberTo cab
(b)
(c)
(d)(a)
Annular orificeMR fluid
Magnetic fieldDamping plate
Flux guide Electromagnet coil
Lower chamberAnnular orificeUpper chamber
Main rubber
Damping plate
Vibration isolation mounts
Cab
Orifice
z
Figure 1 Schematic of vibratory roller with dierent cabrsquos isolation mounts (a) Single drum vibratory roller (b) Passive rubber mount (c)Passive hydraulic mount (d) Semi-active hydraulic mount
zcϕc
zffzrfFc3 Fc1
v0
Fd
l4
l6l7
l2l3
l8l5
mc
mrf ϕrf mffMdy
zsms l1
qd1
Fc1 Fc2
zc
b2 b3zff
mcθc
md
zdθd
b1zsms
qd2md
ωqd1
zd
qt1
cd1kd1 cd1kd1 cd2kd2
b5b4
cskscsks
kt1 ct1
θff mff
zt1
cse1kse1
ksp1cse1kse1
ksp1cse2
ksp2kse2
zse2zse1
Side view Front view
(a)
kr uch
Rear frame
cr
Passive rubber mount (PRM)Passive hydraulic mount (PHM)
Semi-active hydraulic mount (SHM)
z
zc
zf
Cab
(b)
Figure 2 Lumped parameter model of the vibratory roller and dierent cabrsquos isolation mounts (a) Vibratory roller dynamic model (b)Cabrsquos isolation mount model
Shock and Vibration 3
magnetorheological (MR) fluid with adjustable damping[16ndash18] e damping plate of the SHM is equipped with anelectromagnet coil and a flux guide When the coil current ischanging a magnetic field in the flux guide is also beingtransformed thus the viscosity of MR fluid in the annularorifice is simultaneously changing e result is that thevibration damping can be adjusted according to the differentroad surfaces MR fluid flows in the upper-lower chamberare also derived by the transfer of damping plate through theannular orifice and the orifices as seen in Figure 1(d) elumped parameter model of SHM is also represented by alinear stiffness kr and damping cr coefficients of the mainrubber and a semi-active damping force of hydraulic mountfd ch| _z| _z + u Herein u is an active damping force of MRfluid which is controlled by an optimal fuzzy-PID controlleras shown in Figure 2(b)
e corresponding dynamic force at mount i of the cabrsquosisolation mounts in the vertical direction is given by
Fci kri zci minus zrf i( 1113857 + cri _zci minus _zrf i( 1113857 + fdi
fdi
0 with PRM
chi _zci minus _zrf i1113868111386811138681113868
1113868111386811138681113868 _zci minus _zrf i( 1113857 with PHM
chi _zci minus _zrf i1113868111386811138681113868
1113868111386811138681113868 _zci minus _zrf i( 1113857 + ui with SHM
⎧⎪⎪⎪⎨
⎪⎪⎪⎩
zci zc +(minus1)αlα+1ϕc +(minus1)
ibδθc
zrf i zrf minus lυϕrf +(minus1)ibδθrf
_zci _zc +(minus1)αlα+1
_ϕc +(minus1)ibδ
_θc
_zrf i _zrf minus lυ_ϕrf +(minus1)
ibδ
_θrf
(2)
where zci zrfi and _zci _zrf i are the displacements and thevelocities of the cab frame and the rear frame at mount i ofthe isolation mounts When i 1-2 then α 1 υ 5 andδ i+ 1 when i 3-4 then α 2 υ 4 and δ iminus 1
23 Random Excitation of the Off-Road Terrain SurfaceIn actual operating conditions the excitation forces of thevibratory roller are strongly affected by the rough terrainsurfaces apart from wheels-deformable terrain interactionse terrain behaviour under wheel-soil contact is nonlinearus the off-road vibratory rollers must be studied in thefrequency domain apart from the traditional time domain toanalyze the influence of excitation on the ride response Off-road terrain surface in the frequency domain is calculated viathe PSD value [6]e spatial PSD of the road surface profileS(Ω) is described as a function of the spatial frequency Ω(cyclemiddotmminus1) e spectral density of off-road terrain is thuswritten in accordance with ISO proposal [22] over thedifferent spatial frequency ranges by
S(Ω) S Ω0( 1113857ΩΩ0
1113888 1113889
minusw0
(3)
where w0 3 forΩleΩ0 and w0 225 forΩgtΩ0 the valueS(Ω0) provides a measure for the random terrain with thereference spatial frequency Ω0 12π cyclemiddotmminus1
More specifically assuming the vehicle moves with aconstant speed v0 the off-road terrain irregularities in thetime domain can then be simulated by the series
q(t) 1113944N
i1si sin iΔωt + ϕi( 1113857 (4)
where N is the number of intervals and si 2S(iΔn)Δn
1113968is
the amplitude of each the excitation harmonic in which S isthe target spectral density Δn 2πL and L is the length ofthe road segment φi is a random phase uniformly distrib-uted between 0 and 2π and ΔωΔnv0 is the fundamentaltemporal frequency Mitschke [23] extended the spectraldensity ranges for the unpaved off-road classifications apartfrom the traditional asphalt road classifications includingthe classification ranges from good to very poor and thedesired terrain roughness can be yielded by choosing a valuein the spectral density ranges
In order to develop an off-road terrain roughness inputclosing to the actual terrain condition the simulation pa-rameters used for generating the time domain of a roughterrain surface as shown in Figure 3(a) are a type of pooroff-road classification with v0 167mmiddotsminus1 L 84mΔt 0005 s w0 214 and S(Ω0) 37825times10minus6m3middotcycleminus1Its spectral density obtained from the time domain is alsodepicted in Figure 3(b) e frequency region of the inputsignal is mainly below 10Hz
24 Experimental Model Results In order to validate theaccuracy of the mathematical model of the off-road vi-bratory roller experiments and simulations were carriedout with cabrsquos isolation systems when the vehicle movedand compacted at a speed v0 083mmiddotsminus1 on a poor elas-toplastic terrain surface at the excitation frequency 28Hzof the drum [1] e comparison results are shown inFigure 4 With PRM as plotted in Figures 4(a)ndash4(c)comparisons of simulation and experimental results of thePSD acceleration responses are show that the simulationresults almost agree with the tests as to the frequency of thevarious peaks in the responses and the trend In additionthe weighted RMS values of the vertical driverrsquos seat cabrsquospitch and roll vibrations of PRM as shown in Figure 4(d)are deviated small by 1020 1121 and 1267 incomparison with the measured values It implies that themathematical model of the vibratory roller is the accurateand feasible model
In addition simulation results with PHM showed thatboth PSD acceleration responses and the weighted RMSvalues of the vertical driverrsquos seat cabrsquos pitch and rollvibrations are greatly reduced and the PHM has almost noeffect on the resonance frequencies in comparison withPRM under the various operating conditions ereforethe model of the off-road vibratory roller using PHM notonly enhances the vehiclersquos ride comfort but also providesthe accurate and feasible model for low-frequency per-formance analysis of the semi-active cabrsquos hydraulicmounts (SHMs)
4 Shock and Vibration
0 10 20 30 40 50ndash004
ndash002
0
002
004
Time (s)
Rand
om te
rrai
n (m
)
Off-road terrain roughness
(a)
10ndash1 100 10110ndash8
10ndash6
10ndash4
10ndash2
100
Frequency (Hz)
Off-
road
PSD
(m2 middotH
zndash1)
Simulated terrain PSD
Poor target PSD
(b)
Figure 3 Generation of the o-road terrain roughness according to unpaved o-road classication (a) O-road terrain prole (b) Spectraldensities
05 1 2 4 8 16 32 6410ndash4
10ndash3
10ndash2
10ndash1
100
Frequency (Hz)
X 2818Y 0004
Vert
ical
acce
lera
tion
PSD
(m2 middotsndash3
)
Experiment with PRMSimulation with PRMSimulation with PHM
(a)
05 1 2 4 8 16 32 6410ndash4
10ndash3
10ndash2
10ndash1
100
Frequency (Hz)
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)X 2818Y 0037
Experiment with PRMSimulation with PRMSimulation with PHM
(b)
Experiment with PRMSimulation with PRMSimulation with PHM
05 1 2 4 8 16 32 6410ndash5
10ndash4
10ndash3
10ndash2
10ndash1
100
Frequency (Hz)
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3)
X 2818Y 0007
(c)
Experiment with PRMSimulation with PRMSimulation with PHM
03
0
06
09
12
Wei
ghte
d RM
S va
lues
ϕc θczs
0794mmiddotsndash2
0657mmiddotsndash20713mmiddotsndash2
0323radmiddotsndash20396radmiddotsndash2
0446radmiddotsndash2
0085radmiddotsndash2
0150radmiddotsndash2
0131radmiddotsndash2
Degrees of freedom
(d)
Figure 4e experimental and simulation results under an excitation frequency 28Hz of the drum [1] (a) PSD acceleration response of thevertical driverrsquos seat (b) PSD acceleration response of the cabrsquos pitch angle (c) PSD acceleration response of the cabrsquos roll angle (d)Weighted RMS values of the driverrsquos seat and the cab
Shock and Vibration 5
3 Design of the Optimal Fuzzy-PID Controller
31 Modeling of the Optimal Fuzzy-PID Control e PIDcontrol is one of the controllers with not only a simplestructure but also robust performance and it is generallyused in industrial process control However the perfor-mance of PID control depends on the appropriate selectionof the PIDrsquos parameters e well-known Ziegler-Nicholstechnique has been used to choose the PIDrsquos parametersHowever it is only efficient when the system works at thedesigned operating condition Contrariwise the fuzzy logiccontrol (FLC) does not depend on the designed operatingcondition it only depends on the appropriate selection of thefuzzy inference system (FIS) However the shortcomings ofFLC are low precision and stability In order to avoidshortcomings of both FLC and PID control fuzzy-PIDcontrol had been developed [18 20 24] In this study toenhance the control performance of fuzzy-PID control(FPC) the control rules in FIS optimized via the geneticalgorithm (GA) program are then developed and applied forthe FPCrsquos optimization
In the cabrsquos isolationmounts there are four SHMs whichshould be separately controlled thus four optimal fuzzy-PID controls should be designed However the designprocess of these controls is the same erefore a specific ofthe optimal FPC is designed to control the active dampingforce of MR fluid e model of the optimal FPC for SHM isdepicted in Figure 5(a)
In Figure 5(a) fuzzy-PID control includes two inputsand three outputs in which 2 inputs denoted by E and EC arethe vertical displacement error (E) and the vertical velocityerror (EC) of the cab frame and 3 outputs denoted byKpprime Kiprime andKdprime are the proportionality factors respectivelye proportional integral and derivative parameters in PIDcontrol are defined by Kp Ki and Kd which can be auto-matically tuned and depend on the parametersKpprime Kiprime andKdprime of the FLC and the actual control force ofMR fluid u(t) is decided by the PID control the control forcefd of SHM is then used for subsystem of the vehicle In orderto enhance the further performance of the FPC the GAprogram is used to optimize the control rules in FIS via thesubsystem of the vehicle and the objective functions
e force output of the PID control is given by
u(t) Kpe(t) + Ki 1113946t
0e(t)dt + Kd _e(t) (5)
where e(t) is the displacement error the cab framee initial values of proportionality factors in equation
(5) determined by the Ziegler-Nichols method via thesubsystem model are Kp(0) 1985 Ki(0) 18 and Kd(0)
12 In order to find the best values for Kp Ki and Kd weassume their variable ranges as [KpminKpmax] [KiminKimax]and [Kdmin Kdmax] respectively us based on the initialvalues the range of each parameter is chosen by Kp isin [1002500] Ki isin [1 100] and Kd isin [01 10]
e next is a design of the FLC e basic fuzzy controlconsists of the following major parts fuzzification interfaceFIS and defuzzification interface First the crisp values infuzzification are transformed into linguistic variables FIS is
then used by control rules in accordance with inferencerules and finally the linguistic variables are transformedback to crisp values through defuzzification for use by thephysical plant [25] erefore the FPC can be designed inthree steps below
(i) Choosing the fuzzy control input-output two inputvariables E and EC belong to [minus025 025] Besidesthree output variables Kpprime Kiprime andKdprime are calibratedover the interval [0 1] as follows [24]
Kpprime
Kp minusKpmin
Kpmax minusKpmin
Kiprime
Ki minusKimin
Kimax minusKimin
Kdprime
Kd minusKdmin
Kdmax minusKdmin
(6)
Hence the input values in equation (5) are re-spectively Kp 2400Kpprime + 100 Ki 99Kiprime + 1 andKd 99Kdprime + 01e linguistic variables of two inputs are defined bythe positive big (PB) positive small (PS) zero (ZO)negative small (NS) and negative big (NB) Besidesthe linguistic variables of three outputs are alsodefined as small (S) medium small (MS) medium(M) medium big (MB) and big (B) respectively
(ii) Membership function the shape of membershipfunctions of input-output variables is used by thetriangular function and its degree of membership isbetween 0 and 1 as shown in Figure 5(b)
(iii) e FISrsquos rules the initial control rules are given bythe designerrsquos knowledge and experience as follows
(1) If E is NB and EC is NB then Kpprime is MS Kiprime is Sand Kdprime is S
(2) If E is NB and EC is NS then Kpprime isM Kiprime is MSand Kdprime is S
(25) If E is PB and EC is PB then Kpprime is B Kiprime is MBand Kdprime is MB
where FIS is selected by the minimum function andthe centroid method of Mamdani and Assilian [25]and the above control rules are then optimized byGA program through the subsystem model
32 Optimization of the Control Rules Based on theGA Program
321 GA Program GA is an optimization method based onprinciples of natural selection It seeks the maximum or theminimum values of one or more objective functions usingcomputational techniques motivated by biological re-production erefore GA is defined as finding a vector ofdecisive variables that satisfies constraints to give acceptablevalues to all objective functions [26 27] and it can be writtenas follows
6 Shock and Vibration
Find the vector x [x1 x2 xn]T to optimize
F(x) f1(x) f2(x) fn(x)[ ]Tsubject togi(x)le 0 i 1 2 p
hj(x) 0 j 1 2 q
(7)
where F(x) is the vector of objective functions which mustbe either maximized or minimized and p and q are numbersof inequality constraints and equality constraints
GA is structured into the following steps encodingpopulation initialization tness evaluation parent selectiongenetic operations (crossover and mutate) and terminationcriterione ow chart of the GA program for SHM is builtin Figure 6
322 Application of GA Program to Optimize the ControlRules e goal main of GA is to seek the optimal controlrules in FIS to get the minimum values of the weighted RMSacceleration responses of the vertical driverrsquos seat cabrsquospitch and roll vibrations via the subsystem model inFigure 5(a) erefore GArsquos structure is built as follows
(i) Encoding mechanism and initial population in ldquo(iii)e FISrsquos rulesrdquo there are 25 control rules thatcontain a total of 75 elements e 75 elements arethen connected into a string of numbers as achromosome which is regarded as a vectorEncoding mechanism can shorten the chromosomelength of the individuals in population space toenhance the running speed and to reduce thesearching space of the algorithm program us thelinguistic variables of two inputs (E and EC) areencoded by the numbers as [NB NS ZO PS PB][0 1 2 3 4] [aj]1times5 and the linguistic variables ofthree outputs (Kpprime Kiprime andKdprime) are encoded by thenumbers as [S MS M MB B] [5 6 7 8 9] [bj]1times5 Besides the individuals in the initial pop-ulation are randomly generated For each gene thevalue of that gene is also selected as a randompositive integer in the range of 0le ajle 4 and5le bjle 9 and the size of the initial population is 100
(ii) Objective function and tness value the minimumvalues of the weighted RMS acceleration responses(awl) of the vertical driverrsquos seat cabrsquos pitch and rollvibrations are selected as objective functions in this
study e expression of objective functions iswritten in equation (9) In order to nd the mini-mum values of the weighted RMS acceleration re-sponses the tness value J is greatly simplied tocalculate objective functions as follows [20 27]
J 1
sum αla2wl (8)
where subscript l refers to the vertical driverrsquos seat(zs) cabrsquos pitch (ϕc) or cabrsquos roll (θc) vibrations andαl is the scalar that weighted or percent of theweighted RMS values in le individuals with the higher tness value Jwhichis obtained via the subsystem model show that theobtained control rules in ldquo(iii) e FISrsquos rulesrdquo arebetter erefore the resultant individuals areupdated before the evolution process ends and theoptimal individuals can be obtained
(iii) Genetic operations after establishing the initialpopulation and selecting the parents Genetic oper-ations (including crossover and mutation) are thenperformed Herein crossover probability of 095 andmutation probability of 005 have been used in 200
Subsystem ofvibratory roller
SHM withRM damper
Fuzzy
FIS
GA(J)Off-road terrain
EECfd
u(Desired)
awzsawϕcawθc
PID control
(Kpprime Ki
prime Kdprime)
(a)
Kprime
p
Kprime
i
Kprime
d
Control rules(Mamdani)
E
EC
(b)
Figure 5 Structure of the vehicle model with SHM (a) Optimal fuzzy-PID control model (b) FLC control
Yes
No
Initialize population
Select parents
Update FIS and simulatethe Simulink system
Evolutionalnumber of times
End
Initialize parents and establish FIS
Start
Crossover
Mutation
Gen
etic
ope
ratio
ns
Selection
Evaluate the fitnessvalues of individuals
Output the control rulecode and fitness curve
Acceptance function
Figure 6 e ow chart of the GA program for SHM
Shock and Vibration 7
generations erefore the arithmetic crossover isperformed on 95 of the selected parents wherebytwo children are created from the weighted sum oftwo parents and children of the remaining 5 ofselected parents are exact copies of the parentsCrossover operation is performed until the pop-ulation number is doubled en each individualundergoes the mutation operation which is theprocess of randomly changing the values of genes in achromosomewith a probability of 005emutationcan create new genetic material into an existingindividual and add diversity to the genetic charac-teristics of the population Finally through the fitnessvalue J only the optimal individuals are selected atthe end of each generation to exist as the populationof the next generation For the termination criterionthe limitary generation is used then the resultantpopulation is evaluated to determine convergence
323 Optimal Result of the Control Rules In order to seekthe optimal control rules for the FPC we assume that thevibratory roller travels on the deformable terrain at a constantspeed v0 167mmiddotsminus1 and off-road terrain excitation input q(t)of the subsystem model is chosen as in Figure 3(a) with thesimulation time of 10 se scalar that weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibrations areαz 0486 αϕ 0449 and αθ 0065 respectively which aredecided based on the percent of the weighted RMS value of thevertical driverrsquos seat (486) cabrsquos pitch (449) and cabrsquos rollvibrations (65) with the weighted RMS values of the PHM inTable 1 e maximum generation is 200
e result in Figure 7 shows that the maximum fitnessvalue J is obtained from the evolutionary generation of 133to the end erefore the optimal individuals can be ob-tained at the generation of 133 By recording the optimalcontrol rules in FIS are listed in Table 2 e optimal controlrules are then used for the optimal FPC to simulate andanalyze the low-frequency performance of semi-active cabrsquoshydraulic mounts
4 Results and Discussion
41 Evaluation Criteria e performance of the vehiclesuspension system is evaluated by three main indices in thetime domain including the ride comfort working space androad holding characteristics
Among these three indices the ride comfort perfor-mance evaluated via the weighted RMS acceleration re-sponse is considered to be the most important index [1] Inaddition in the international standard ISO 2631-1 [12] thePSD acceleration response is also applied to estimate theeffect of vibration on the endurance limit of the human bodyin the frequency domain It was suggested that a low-frequency range of 4ndash10Hz for the vertical and of 05ndash2Hz for the rotational vibrations seriously affected thedriverrsquos health and safety In this study the performance ofSHM also is evaluated through both the PSD and theweighted RMS acceleration responses of the vertical driverrsquos
seat cabrsquos pitch and roll vibrations in the frequency andtime domains us the smaller PSD and weighted RMSvalues mean to be the better ability of the correspondingisolation mounts e expression of RMS was given by
awl
1T
1113946T
0euroxl(t)1113858 1113859
2dt
1113971
(9)
where euroxl(t) is the acceleration response in the l as a functionof time and T 50 s is the time of simulation
42 Control Performance When the Vehicle Travels on theDeformableTerrain In this study the vehicle is assumed to betraveling on a terrain type of Grenville loam given by Wong[28] at a constant speed v0 167mmiddotsminus1 e Grenville loamrsquosparameters including n 101 kc 006times103Nmiddotmminus(n+1)kφ 5880times103Nmiddotmminus(n+2) c 31times 103 Pa φ 298deg and itsoff-road terrain irregularity as in Figures 3(a) are the randomexcitation inputs of the simulatingmodel Simulations are thencarried out to analyze the low-frequency performance of SHMbased on the design parameters of a single drum vibratoryroller [1]
A good cabrsquos isolation system should be able to minimizeits deflection and acceleration to enhance the driverrsquos ridecomfort In addition the driverrsquos mental and physical healthis affected not only by the acceleration responses in the timeregion but also by the PSD acceleration responses in the low-frequency region [11]erefore the maximum PSD and theweighted RMS values of the vertical driverrsquos seat cab pitchand roll vibrations are respectively given to compare thelow-frequency performance of SHM
e simulation results of the PSD acceleration responsesof the vertical driverrsquos seat cabrsquos pitch and roll vibrations areplotted in Figures 8(a)ndash8(c) respectively In Figure 8 theresonance frequencies of PSD acceleration responses of thevertical driverrsquos seat cabrsquos pitch and roll vibrations withSHM without optimization and with optimization have notbeen changed in comparison with PHM is can be due tothe fact that stiffness coefficients of the cabrsquos isolation systemare unchanged and its damping control forces have almostno effect on the resonance frequencies However themaximum resonance peaks of the PSD acceleration re-sponses are significantly transformed by the SHM
e maximum resonance peaks of the PSD accelerationresponses of the vertical driverrsquos seat cabrsquos pitch and rollvibrations of SHM without optimization are smaller thanPHM Meanwhile the maximum resonance peaks of the PSDacceleration responses of SHM with optimization are thesmallest Especially in low-frequency below 4Hz the maxi-mum PSD values of the vertical driverrsquos seat cabrsquos pitch androll vibrations of SHM with optimization are greatly reducedby 3297 2908 and 6440 in comparison with PHMrespectively is is due to the main impact of the semi-activedamping force of hydraulic mount fd ch| _z| _z + u ere-fore the health of the driver can be clearly improved by SHMusing the optimal fuzzy-PID controller
e simulation results of the acceleration responses arealso shown in Figures 9(a)ndash9(c) In Figure 9 we can see that
8 Shock and Vibration
the acceleration responses of SHM with optimization arelower than both PHM and SHM without optimizationBesides the weighted RMS acceleration responses in Table 1also show that the weighted RMS values of the verticaldriverrsquos seat cabrsquos pitch and roll vibrations of SHM withoptimization are strongly reduced by 3499 4256 and4172 in comparison with PHM respectively e aboveanalysis results indicate that when the vehicle travels on thedeformable terrain the driverrsquos ride comfort can be clearlyimproved by SHM with optimization in both the time andthe low-frequency region erefore the SHM with opti-mization could provide the best ride comfort performancefor the off-road vibratory roller in the condition of thevehicle traveling
43 Control Performance When the Vehicle Moves andCompacts on the Elastoplastic Soil Ground In the workingcondition of the vibratory roller the effect of the elastoplasticsoil grounds on the performance of the compaction processwas studied under the excitation frequencies of the drum in arange of 01ndash70Hz [2ndash4 9] the research results showed thatcomprehensive drumsoil contact and loss of contact data
had appeared over a range of 15ndash40Hz [4] especially at theexcitation frequencies of 285Hz and 33Hz of the drumwhich yielded the maximum compaction forces due toldquodouble-jumprdquo of the drum [2 9] Based on the designparameters of a single drum vibratory roller [1] the exci-tation frequency of the vibratory drum in the workingcondition was also given at 28 and 35Hz therefore theexcitation frequencies of the vibratory drum at 28 and 35Hzwith the parameters of the vehicle [1] are used for simulationBesides in compression process of the drum the elastoplasticsoil properties are changed during the interaction between therigid drum and soil ground e elastoplastic soil propertiesare represented via three different values of the plasticityparameter ε including low-density soil ε 034 medium-density soil ε 072 and high-density soil ε 087 [9]However the elastoplastic property of low-density soil(ε 034) is similar to the property of a soft soil deformationwhich is simulated in the condition of the vehicle travelingerefore in order to evaluate the low-frequency perfor-mance of SHM in the condition of the vehicle working thevehicle is moved and compacted at very slow speed 083mmiddotsminus1under a lowhigh excitation frequency 2835Hz of the vi-bratory drum on a high elastoplastic soil ground e
50 100 150 2001
15
2
25
3X 133Y 2579
Evolutionary generations
J
Figure 7 e curve of fitness value
Table 1 e weighted RMS acceleration responses on a deformable terrain
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 1063 0875 0691 3499awϕc (radmiddotsminus2) 0982 0810 0564 4256awθc (radmiddotsminus2) 0139 0100 0081 4172
Table 2 Result of the optimal control rules
ECE
Kpprime Kiprime Kdprime
NB NS ZO PS PB NB NS ZO PS PB NB NS ZO PS PB
NB M MB B MS S S S M MB S S M B MB BNS MB M MS M MS S B MB MS M MS S M M SZO M S S S M MS MS S M MB M B S S MSPS MS M MS M B MS S M MB S MB MS S MS MSPB S MS M MB MB M M MS S S MS B S S M
Shock and Vibration 9
PHMSHM without optimizationSHM with optimization
05 1 2 4 8 16 32 640
02
04
06
08
Frequency (Hz)
Vert
ical
acce
lera
tion
PSD
(m2 middotsndash3
)X 209Y 0558
X 209Y 0374
ndash3297
(a)
PHMSHM without optimizationSHM with optimization
0
02
04
06
X 209Y 0361
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 209Y 0256
ndash2908
05 1 2 4 8 16 32 64Frequency (Hz)
(b)
PHMSHM without optimizationSHM with optimization
0
01
X 259Y 0059
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3)
X 259Y 0021
ndash6440
05 1 2 4 8 16 32 64Frequency (Hz)
(c)
Figure 8 Results of the PSD acceleration responses on the deformable terrain (a) Vertical driverrsquos seat (b) Cabrsquos pitch angle (c) Cabrsquos rollangle
PHMSHM without optimizationSHM with optimization
45 46 47 48 49 50ndash4
ndash2
0
2
4
Time (s)
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
(a)
PHMSHM without optimizationSHM with optimization
ndash4
ndash2
0
2
4
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
45 46 47 48 49 50Time (s)
(b)
Figure 9 Continued
10 Shock and Vibration
PHMSHM without optimizationSHM with optimization
ndash03
ndash02
ndash01
0
01
02
03
Roll
acce
lera
tion
(rad
middotsndash2)
45 46 47 48 49 50Time (s)
(c)
Figure 9 Results of the acceleration responses on the deformable terrain (a) Vertical driverrsquos seat (b) Cabrsquos pitch angle (c) Cabrsquos roll angle
05 1 2 4 8 16 32 640
01
02
03
04
X 569Y 0074
Frequency (Hz)
Vert
ical
acce
lera
tion
PSD
(m2 middotsndash3
)
X 2818Y 0014
X 209Y 0376 ndash2446
PHMSHM without optimizationSHM with optimization
X 209Y 0284
(a)
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
X 2818Y 0033
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 569Y 0045
X 209Y 0197
X 209Y 0135
ndash3147
PHMSHM without optimizationSHM with optimization
(b)
05 1 2 4 8 16 32 64Frequency (Hz)
0
001
002
003
004
X 2818Y 0008
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3) X 249
Y 0032
X 269Y 0013 X 569
Y 0011
ndash5937
PHMSHM without optimizationSHM with optimization
(c)
Figure 10 Results of the PSD acceleration responses under a low excitation frequency 28Hz of the drum (a) Vertical driverrsquos seat (b)Cabrsquos pitch angle (c) Cabrsquos roll angle
Shock and Vibration 11
parameters of the high elastoplastic soil ground includesε 087 ksp 283times106Nmiddotmminus1 kse 423times106Nmiddotmminus1 andcse 371times 103Nsmiddotmminus1
e comparison results of the PSD acceleration responsesof the vertical driverrsquos seat cabrsquos pitch and roll vibrations withthe cabrsquos isolation systems at a lowhigh excitation frequency2835Hz of the vibratory drum are seen in Figures 10 and 11Similarly in the condition of the vehicle traveling the res-onance frequencies of PSD acceleration responses of thevertical driverrsquos seat cabrsquos pitch and roll vibrations of SHMwithout optimization and SHM with optimization are alsounchanged in comparison with PHM e simulation resultsalso show that the resonance frequencies of SHM withoutoptimization and SHMwith optimization also occur at 28183518Hz comparable with PHM in all three directions iscan be due to the effect of the resonance at a lowhigh ex-citation frequency 2835Hz of the vibratory drum In ad-dition the resonance frequency of the acceleration PSDresponses of all cabrsquos isolation systems clearly appears at569Hz in both graphs of Figures 10 and 11 whereas thisresonance frequency does not occur in the graph of Figure 8
is particularity may be due to the effect of the soil stiffnesswith the high-density soil ground
Besides at a low-frequency range below 4Hz themaximum resonance peaks of the PSD acceleration re-sponses of the vertical driverrsquos seat cabrsquos pitch and rollvibrations of SHMwith optimization are strongly reduced incomparison with PHM by 2446 3147 and 5937 at alow excitation frequency 28Hz of the drum and by 17763352 and 5385 at a high excitation frequency 35Hz ofthe drum respectively is is also due to the main impact ofthe semi-active damping force of hydraulic mountfd ch| _z| _z + u Contrarily at a frequency range upper 4Hzthe PSD acceleration responses of the vertical driverrsquos seatcabrsquos pitch and roll vibrations of SHMwithout optimizationand SHM with optimization are slightly increased incomparison with PHM especially at the resonance fre-quency of 569Hz However the PSD acceleration values arevery small erefore the driverrsquos health can be clearlyimproved by using SHM with optimization in the low-frequency region when the vehicle moves and compactson an elastoplastic soil ground
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
03
04Ve
rtic
al ac
cele
ratio
n PS
D (m
2 middotsndash3)
X 3518Y 00018
X 569Y 0031
X 209Y 0321
X 209Y 0264
ndash1776
PHMSHM without optimizationSHM with optimization
(a)
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 3518Y 0015
X 569Y 0019
X 209Y 0182
X 209Y 0121
ndash3352
PHMSHM without optimizationSHM with optimization
(b)
05 1 2 4 8 16 32 64Frequency (Hz)
0
001
002
003
004
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3)
X 569Y 0004
X 249Y 0026
X 3518Y 00035
X 269Y 0012
ndash5385
PHMSHM without optimizationSHM with optimization
(c)
Figure 11 Results of the PSD acceleration responses under a high excitation frequency 35Hz of the drum (a) Vertical driverrsquos seat (b)Cabrsquos pitch angle (c) Cabrsquos roll angle
12 Shock and Vibration
45 46 47 48 49 50ndash2
ndash1
0
1
2
Time (s)
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(a)
45 46 47 48 49 50Time (s)
ndash1
ndash05
0
05
1
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(b)
45 46 47 48 49 50Time (s)
ndash01
ndash005
0
005
01
Roll
acce
lera
tion
(rad
middotsndash2)
PHMSHM without optimizationSHM with optimization
(c)
Figure 12 Results of the acceleration responses under a low excitation frequency 28Hz of the drum (a) Vertical driverrsquos seat (b) Cabrsquospitch angle (c) Cabrsquos roll angle
45 46 47 48 49 50Time (s)
ndash2
ndash1
0
1
2
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(a)
45 46 47 48 49 50Time (s)
ndash1
ndash05
0
05
1
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(b)
Figure 13 Continued
Shock and Vibration 13
e simulation results in Figures 12 and 13 also showthat the acceleration responses of the vertical driverrsquos seatcabrsquos pitch and roll vibrations of SHM with optimizationare lower than both PHM and SHM without optimizationBesides the values of the weighted RMS accelerationresponses are also listed in Tables 3 and 4 e weightedRMS values of the vertical driverrsquos seat cabrsquos pitch androll vibrations of SHM with optimization are greatly re-duced in comparison with SHM by 3516 4829 and3765 under a low excitation frequency 28 Hz of thedrum and by 2480 4315 and 3606 under a highexcitation frequency 35 Hz of the drum respectivelyConsequently the above analysis results also indicate thatthe driverrsquos ride comfort and health are strongly improvedby SHM with optimization when the vehicle moves andcompacts on the high elastoplastic soil ground under boththe lowhigh excitation frequency 2835 Hz of the vi-bratory drum
5 Conclusions
Modeling and low-frequency performance analysis of semi-active cabrsquos hydraulic mounts of the off-road vibratory rollerare addressed in this work e comparison between thesimulation and test results of passive cabrsquos isolation mounts
is also carried out e low-frequency performance of SHMusing the optimal fuzzy-PID controller is then evaluatedthrough the PSD acceleration and weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibrations inboth the frequency and time domains e results aresummarized as follows
(1) In the condition of the vehicle traveling the weightedRMS acceleration responses and the PSD accelera-tion responses of the vertical driverrsquos seat cabrsquos pitchand roll vibrations of SHM with optimization arelower than both PHM and SHM without optimi-zation Particularly the weighted RMS values ofSHM with optimization are strongly reduced incomparison with PHM by 3499 4256 and4172 respectively
(2) In condition of the vehicle working both PSD ac-celeration responses and the weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibra-tions of SHM using the optimal fuzzy-PID controllerare clearly smaller comparable with both PHM andSHM without optimization under both lowhighexcitation frequency 2835Hz of the drum on thehigh elastoplastic soil ground Especially the maxi-mum PSD values of the vertical driverrsquos seat cabrsquos
45 46 47 48 49 50Time (s)
ndash01
ndash005
0
005
01
Roll
acce
lera
tion
(rad
middotsndash2)
PHMSHM without optimizationSHM with optimization
(c)
Figure 13 Results of the acceleration responses under a high excitation frequency 35Hz of the drum (a) Vertical driverrsquos seat (b) Cabrsquospitch angle (c) Cabrsquos roll angle
Table 3 e weighted RMS values under a low excitation frequency 28Hz of the drum
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 0657 0501 0426 3516awϕc (radmiddotsminus2) 0323 0184 0167 4829awθc (radmiddotsminus2) 0085 0056 0053 3765
Table 4 e weighted RMS values under a high excitation frequency 35Hz of the drum
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 0512 0453 0385 2480awϕc (radmiddotsminus2) 0241 0162 0137 4315awθc (radmiddotsminus2) 0061 0040 0039 3606
14 Shock and Vibration
pitch and roll vibrations of SHM with optimizationare strongly reduced by 2446 3147 and 5937in comparison with PHM when the vehicle compactsat a low excitation frequency 28Hz of the drum
(3) e above analysis results indicate that the low-frequency and high-stiffness characteristics of SHMusing the optimal fuzzy-PID controller have the besteffect on isolating low-frequency vibration trans-mitted and controlling the cab shaking under variousoperating conditions of the off-road vibratory roller
Data Availability
e data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] V Liem J Zhang V Quynh and R Jiao ldquoVibration analysisand modeling of an off-road vibratory roller equipped withthree different cabrsquos isolation mountsrdquo Shock and Vibrationvol 2018 Article ID 8527574 17 pages 2018
[2] D Adam and F Kopf ldquoeoretical analysis of dynamicallyloaded soilsrdquo in Proceedings of the European WorkshopCompaction of Soils and Granular Materials pp 207ndash217Paris France 2000
[3] J Li Z Zhang H Xu and Z Feng ldquoDynamic characteristicsof the vibratory roller test-bed vibration isolation systemsimulation and experimentrdquo Journal of Terramechanicsvol 56 pp 139ndash156 2014
[4] J Paul and A Michael ldquoCapturing nonlinear vibratory rollercompactor behavior through lumped parameter modelingrdquoJournal of Engineering Mechanics vol 134 no 8 pp 684ndash6932008
[5] X Zhang Modelling simulation and optimization of ridecomfort for off road articulated dump trucks PhD thesisSoutheast University Nanjing China 2010
[6] A Pakowski and D Cao ldquoEffect of soil deformability on off-road vehicle ride dynamicsrdquo SAE International Journal ofCommercial Vehicles vol 6 no 2 pp 362ndash371 2013
[7] R A Irani R J Bauer and A Warkentin ldquoDynamic wheel-soil model for lightweight mobile robots with smooth wheelsrdquoJournal of Intelligent amp Robotic Systems vol 71 no 2pp 179ndash193 2013
[8] S Park A A Popov and D J Cole ldquoInfluence of soil de-formation on off-road heavy vehicle suspension vibrationrdquoJournal of Terramechanics vol 41 no 1 pp 41ndash68 2004
[9] A Kordestani S Rakheja P Marcotte A Pazooki andD Juras ldquoAnalysis of ride vibration environment of soilcompactorsrdquo SAE International Journal of Commercial Ve-hicles vol 3 no 1 pp 259ndash272 2010
[10] V Quynh Vibration study and control for cab of vibratoryroller PhD thesis Southeast University Nanjing China2013
[11] M Griffin Handbook of Human Vibration Academic PressLondon UK 1990
[12] International Organization for Standardization ldquoMechanicalvibration and shock-evaluation of human exposure to wholebody vibration-part 2 general requirementsrdquo Tech Rep ISO2631-11997 ISO Geneva Switzerland 1997
[13] S Yildirim ldquoVibration control of suspension systems using aproposed neural networkrdquo Journal of Sound and Vibrationvol 277 no 4-5 pp 1059ndash1069 2004
[14] N Ebrahimi and A Gharaveisi ldquoOptimal fuzzy supervisorcontroller for an active suspension systemrdquo InternationalJournal of Soft Computing amp Engineering vol 2 no 4pp 36ndash39 2012
[15] Z Xie P Wong J Zhao T Xu and I Wong ldquoA noise-insensitive semi-active air suspension for heavy-duty vehicleswith an integrated fuzzy-wheelbase preview controlrdquo Math-ematical Problem in Engineering vol 2013 Article ID 12195312 pages 2013
[16] B Kasemi A G A Muthalif M M Rashid and S FathimaldquoFuzzy-PID controller for semi-active vibration control usingmagnetorheological fluid damperrdquo Procedia Engineeringvol 41 pp 1221ndash1227 2012
[17] T Nguyen A novel semi-active magnetorheological mount forvibration isolation PhD thesis e University of ToledoToledo OH USA 2009
[18] A Muthalif B Kasemi D Nordin and M Rashid ldquoSemi-active vibration control using experimental model of Mag-netorheological damper with adaptive fuzzy-PID controllerrdquoSmart Structures and Systems vol 20 no 1 pp 85ndash97 2017
[19] S D Nguyen Q H Nguyen and S-B Choi ldquoA hybridclustering based fuzzy structure for vibration control-part 2an application to semi-active vehicle seat-suspension systemrdquoMechanical Systems and Signal Processing vol 56-57pp 288ndash301 2015
[20] W Wang Y Song Y Xue H Jin J Hou and M Zhao ldquoAnoptimal vibration control strategy for a vehiclersquos active sus-pension based on improved cultural algorithmrdquo Applied SoftComputing vol 28 pp 167ndash174 2015
[21] Y Chen Z Wang J Qiu and Z Huang ldquoHybrid fuzzyskyhook surface control using multi-objective microgeneticalgorithm for semi-active vehicle suspension system ridecomfort stability analysisrdquo Journal of Dynamic SystemsMeasurement amp Control vol 134 no 4 pp 1ndash14 2012
[22] International Organization for Standardization ldquoReportingvehicle road surface irregularitiesrdquo Tech Rep ISOTC108SC2WG4 N57 ieme Medical Publishers Stuttgart Germany1982
[23] M Mitschke Dynamik der Kraftfahrzeuge Springer-VerlagBerlin Germany 1972
[24] M Rahmat ldquoApplication of selftuning fuzzy PID controlleron industrial hydraulic actuator using system identificationapproachrdquo International Journal on Smart Sensing amp In-telligent Systems vol 2 no 2 pp 246ndash261 2009
[25] E H Mamdani and S Assilian ldquoAn experiment in linguisticsynthesis with a fuzzy logic controllerrdquo International Journalof Man-Machine Studies vol 7 no 1 pp 1ndash13 1975
[26] Z Nariman M Salehpour A Jamali and E HanghgooldquoPareto optimization of a five-degree of freedom vehicle vi-bration model using a MUGArdquo Engineering Applications ofArtificial Intelligence vol 23 no 4 pp 543ndash551 2010
[27] H John G Michael and D Gregory ldquoMulti-objective controloptimization for semi-active vehicle suspensionsrdquo Journal ofSound and Vibration vol 330 pp 5502ndash5516 2011
[28] J Y Wong ldquoData processing methodology in the charac-terization of the mechanical properties of terrainrdquo Journal ofTerramechanics vol 17 no 1 pp 13ndash41 1980
Shock and Vibration 15
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

the low-frequency range of 05ndash10Hz caused by terrain surfaceroughness can lead to the main risk factors which seriouslyaffect the driverrsquos mental and physical health [11] ereforethe PRM is difficult to satisfy the driverrsquos ride comfort underthe low-frequency excitation region of off-road terrain
e vibratory roller cabrsquos isolation system is one of themost important factors to improve the driverrsquos ride comfortA 3D nonlinear dynamic model of an off-road vibratoryroller equipped with three different cabrsquos isolation mountsincluding the PRM the passive hydraulic mounts (PHMs)and the pneumatic mounts was studied via the simulationand experimental investigations to investigate the vehiclersquosride comfort in a low-frequency region [1] e resultsshowed that the low-frequency and high-stiffness charac-teristics of the PHM have a good effect on isolating low-frequency vibration transmitted and controlling the cabshaking of the vibratory roller However the vertical driverrsquosseat and cabrsquos pitch vibrations were still great under oper-ating conditions according to ISO 2631-11997 [12]erefore research and control of the semi-active cabrsquoshydraulic mounts (SHMs) of the vibratory roller to enhancethe ride comfort is necessary
Nowadays the combined control methods such as theneural-PID control fuzzy-PID control and integratedfuzzy-wheelbase preview control [13ndash15] were stronglydeveloped for controlling the magnetorheological fluid ofthe semi-active suspension systems [16ndash18] In order toenhance the control performance the optimal controlmethods such as neuro-fuzzy control with the fuzzy rulesoptimized by the genetic algorithm [19] fuzzy-PID controlwith the control rules optimized by cultural algorithm [20]and fuzzy-skyhook control using the multiobjectivemicrogenetic algorithm [21] were also successfully appliede research results showed that the optimal controlmethods were better than without optimization Howeverall the above research studies mainly investigate the per-formance of the control methods thus the quarter carmodels are mostly used for all research studies In additionthe above combined control methods have not yet beenconsidered and applied for the SHM of the vibratory rollererefore researching an optimal control method for theSHM to enhance further the off-road vibratory rollerrsquos ridecomfort is necessary
In this study based on a three-dimensional nonlineardynamic model of the off-road vibratory roller equipped withPHM [1] an SHM using the magnetorheological fluid withadjustable damping is then developed An optimal fuzzy-PIDcontrol method in which the fuzzy control rules optimized bythe genetic algorithm program is applied to optimize thecontrol force of the SHM e performance of SHM withoptimization for the ride comfort and the health of the driveris then evaluated through the power spectral density (PSD)and weighted root mean square (RMS) acceleration responsesof the vertical driverrsquos seat cabrsquos pitch and roll vibrations inboth the frequency and time domains under actual operatingconditions of the off-road vibratory roller
e innovation in this paper is that an 11-DOF vehicledynamics model which can fully reflect the pitch and roll ofthe cab is concerned under the various operating conditions
A new optimal method of the fuzzy control rules based onthe genetic algorithm which is known as a multiobjectiveoptimal algorithm with wide search range and short searchtime is successfully developed and applied for the optimalfuzzy-PID controller e two evaluation methods includingthe evaluation method of the vibration effect to the driverrsquosride comfort via the weighted RMS acceleration response inthe time region and the evaluation method of the vibrationeffect to the health and safety of the driver via the PSDacceleration responses in the low-frequency region arecarried out e vibration responses of the vibratory rollerunder low-frequency excitation of the off-road terrainground especially the pitch and roll vibration response ofthe cab with PHM SHM without optimization and SHMwith optimization are respectively simulated and analyzede results show that the low-frequency and high-stiffnesscharacteristics of SHM with optimization have a good effecton isolating low-frequency vibration transmitted and con-trolling the cab shaking of the vibratory roller
2 Vibratory Roller Dynamic Models
21 Modeling of the Off-Road Vibratory Roller DynamicBased on a three-dimensional nonlinear dynamic model ofthe off-road vibratory roller [1] as shown in Figure 1(a) thebasic structure of the vibratory roller consists of the rigiddrumtires the frontrear vehicle frame the cab and theseat e cab is connected with the rear frame via the cabrsquosisolation mounts which contain PRM PHM or SHM asshown in Figures 1(b)ndash1(d) respectively
A three-dimensional nonlinear dynamic model witheleven-DOF of a single drum vibratory roller and the cabrsquosisolation mount models are built as in Figures 2(a) and 2(b)
In Figure 2(a) zs represents the vertical motion at thedriverrsquos seat zc ϕc and θc are the vertical the pitch and theroll motions at the cab respectively and those are describedas zrf ϕrf and θrf at the rear vehicle frame e vertical androll motions of the front frame and the drum are described aszff θff and zd θd zsej and ztj are the vertical motion of thedeformable terrain under the drum and the tyres e massof the driver the cab the front frame the engine the rearframe and the roller drum is described as ms mc mff mrfand md respectively Fci is the vertical dynamic forcesgenerated by the cabrsquos isolation mounts (i 1ndash 4) qtj and qdjare the off-road terrain roughness surface at tyres and drumcontacts
Based on the dynamic model of the vibratory roller andoff-road terrains interaction as shown in Figure 2(a) andthe motion equations of the driverrsquos seat cab frontrearvehicle frame and wheels-deformable terrains interaction[1] the motion equations of the off-road vibratory roller canbe represented in the matrix form as follows
[M] euroZ1113966 1113967 +[C] _Z1113966 1113967 +[K] Z F(t) (1)
where [M] [C] and [K] are (mtimesm) mass damping andstiffness matrices respectively Z is the (mtimes 1) displace-ment vector F(t) is the (mtimes 1) exciting force vector andmis the number of DOF (m 11)
2 Shock and Vibration
22 Mathematical Model for the Cabrsquos Isolation MountsBoth the PRM and the PHM as plotted in Figures 1(b) and1(c) and their lumped parameter models described as inFigure 2(b) were studied via the simulation and experiment[1] Herein kr and cr are linear stiness and damping co-ecient of the main rubber mount and a liquid dampingforce fd ch| _z| _z is expressed as the damping characteristic
of a quadratic nonlinearity in which ch is the dampingconstant of the hydraulic mount
In addition a new model of SHM for the vibratory rollerbased on the PHM is proposed in this study e basicstructure of an SHM includes a main rubber a dampingplate driven by the bolt and a closed chamber lled with theuid However the uid used in the closed chamber is a
13
Cab
WheelRear frame DrumFront frame
Fc
zc
z
Rear frame
Fczf
X
Y
Z
To frameRubberTo cab
(b)
(c)
(d)(a)
Annular orificeMR fluid
Magnetic fieldDamping plate
Flux guide Electromagnet coil
Lower chamberAnnular orificeUpper chamber
Main rubber
Damping plate
Vibration isolation mounts
Cab
Orifice
z
Figure 1 Schematic of vibratory roller with dierent cabrsquos isolation mounts (a) Single drum vibratory roller (b) Passive rubber mount (c)Passive hydraulic mount (d) Semi-active hydraulic mount
zcϕc
zffzrfFc3 Fc1
v0
Fd
l4
l6l7
l2l3
l8l5
mc
mrf ϕrf mffMdy
zsms l1
qd1
Fc1 Fc2
zc
b2 b3zff
mcθc
md
zdθd
b1zsms
qd2md
ωqd1
zd
qt1
cd1kd1 cd1kd1 cd2kd2
b5b4
cskscsks
kt1 ct1
θff mff
zt1
cse1kse1
ksp1cse1kse1
ksp1cse2
ksp2kse2
zse2zse1
Side view Front view
(a)
kr uch
Rear frame
cr
Passive rubber mount (PRM)Passive hydraulic mount (PHM)
Semi-active hydraulic mount (SHM)
z
zc
zf
Cab
(b)
Figure 2 Lumped parameter model of the vibratory roller and dierent cabrsquos isolation mounts (a) Vibratory roller dynamic model (b)Cabrsquos isolation mount model
Shock and Vibration 3
magnetorheological (MR) fluid with adjustable damping[16ndash18] e damping plate of the SHM is equipped with anelectromagnet coil and a flux guide When the coil current ischanging a magnetic field in the flux guide is also beingtransformed thus the viscosity of MR fluid in the annularorifice is simultaneously changing e result is that thevibration damping can be adjusted according to the differentroad surfaces MR fluid flows in the upper-lower chamberare also derived by the transfer of damping plate through theannular orifice and the orifices as seen in Figure 1(d) elumped parameter model of SHM is also represented by alinear stiffness kr and damping cr coefficients of the mainrubber and a semi-active damping force of hydraulic mountfd ch| _z| _z + u Herein u is an active damping force of MRfluid which is controlled by an optimal fuzzy-PID controlleras shown in Figure 2(b)
e corresponding dynamic force at mount i of the cabrsquosisolation mounts in the vertical direction is given by
Fci kri zci minus zrf i( 1113857 + cri _zci minus _zrf i( 1113857 + fdi
fdi
0 with PRM
chi _zci minus _zrf i1113868111386811138681113868
1113868111386811138681113868 _zci minus _zrf i( 1113857 with PHM
chi _zci minus _zrf i1113868111386811138681113868
1113868111386811138681113868 _zci minus _zrf i( 1113857 + ui with SHM
⎧⎪⎪⎪⎨
⎪⎪⎪⎩
zci zc +(minus1)αlα+1ϕc +(minus1)
ibδθc
zrf i zrf minus lυϕrf +(minus1)ibδθrf
_zci _zc +(minus1)αlα+1
_ϕc +(minus1)ibδ
_θc
_zrf i _zrf minus lυ_ϕrf +(minus1)
ibδ
_θrf
(2)
where zci zrfi and _zci _zrf i are the displacements and thevelocities of the cab frame and the rear frame at mount i ofthe isolation mounts When i 1-2 then α 1 υ 5 andδ i+ 1 when i 3-4 then α 2 υ 4 and δ iminus 1
23 Random Excitation of the Off-Road Terrain SurfaceIn actual operating conditions the excitation forces of thevibratory roller are strongly affected by the rough terrainsurfaces apart from wheels-deformable terrain interactionse terrain behaviour under wheel-soil contact is nonlinearus the off-road vibratory rollers must be studied in thefrequency domain apart from the traditional time domain toanalyze the influence of excitation on the ride response Off-road terrain surface in the frequency domain is calculated viathe PSD value [6]e spatial PSD of the road surface profileS(Ω) is described as a function of the spatial frequency Ω(cyclemiddotmminus1) e spectral density of off-road terrain is thuswritten in accordance with ISO proposal [22] over thedifferent spatial frequency ranges by
S(Ω) S Ω0( 1113857ΩΩ0
1113888 1113889
minusw0
(3)
where w0 3 forΩleΩ0 and w0 225 forΩgtΩ0 the valueS(Ω0) provides a measure for the random terrain with thereference spatial frequency Ω0 12π cyclemiddotmminus1
More specifically assuming the vehicle moves with aconstant speed v0 the off-road terrain irregularities in thetime domain can then be simulated by the series
q(t) 1113944N
i1si sin iΔωt + ϕi( 1113857 (4)
where N is the number of intervals and si 2S(iΔn)Δn
1113968is
the amplitude of each the excitation harmonic in which S isthe target spectral density Δn 2πL and L is the length ofthe road segment φi is a random phase uniformly distrib-uted between 0 and 2π and ΔωΔnv0 is the fundamentaltemporal frequency Mitschke [23] extended the spectraldensity ranges for the unpaved off-road classifications apartfrom the traditional asphalt road classifications includingthe classification ranges from good to very poor and thedesired terrain roughness can be yielded by choosing a valuein the spectral density ranges
In order to develop an off-road terrain roughness inputclosing to the actual terrain condition the simulation pa-rameters used for generating the time domain of a roughterrain surface as shown in Figure 3(a) are a type of pooroff-road classification with v0 167mmiddotsminus1 L 84mΔt 0005 s w0 214 and S(Ω0) 37825times10minus6m3middotcycleminus1Its spectral density obtained from the time domain is alsodepicted in Figure 3(b) e frequency region of the inputsignal is mainly below 10Hz
24 Experimental Model Results In order to validate theaccuracy of the mathematical model of the off-road vi-bratory roller experiments and simulations were carriedout with cabrsquos isolation systems when the vehicle movedand compacted at a speed v0 083mmiddotsminus1 on a poor elas-toplastic terrain surface at the excitation frequency 28Hzof the drum [1] e comparison results are shown inFigure 4 With PRM as plotted in Figures 4(a)ndash4(c)comparisons of simulation and experimental results of thePSD acceleration responses are show that the simulationresults almost agree with the tests as to the frequency of thevarious peaks in the responses and the trend In additionthe weighted RMS values of the vertical driverrsquos seat cabrsquospitch and roll vibrations of PRM as shown in Figure 4(d)are deviated small by 1020 1121 and 1267 incomparison with the measured values It implies that themathematical model of the vibratory roller is the accurateand feasible model
In addition simulation results with PHM showed thatboth PSD acceleration responses and the weighted RMSvalues of the vertical driverrsquos seat cabrsquos pitch and rollvibrations are greatly reduced and the PHM has almost noeffect on the resonance frequencies in comparison withPRM under the various operating conditions ereforethe model of the off-road vibratory roller using PHM notonly enhances the vehiclersquos ride comfort but also providesthe accurate and feasible model for low-frequency per-formance analysis of the semi-active cabrsquos hydraulicmounts (SHMs)
4 Shock and Vibration
0 10 20 30 40 50ndash004
ndash002
0
002
004
Time (s)
Rand
om te
rrai
n (m
)
Off-road terrain roughness
(a)
10ndash1 100 10110ndash8
10ndash6
10ndash4
10ndash2
100
Frequency (Hz)
Off-
road
PSD
(m2 middotH
zndash1)
Simulated terrain PSD
Poor target PSD
(b)
Figure 3 Generation of the o-road terrain roughness according to unpaved o-road classication (a) O-road terrain prole (b) Spectraldensities
05 1 2 4 8 16 32 6410ndash4
10ndash3
10ndash2
10ndash1
100
Frequency (Hz)
X 2818Y 0004
Vert
ical
acce
lera
tion
PSD
(m2 middotsndash3
)
Experiment with PRMSimulation with PRMSimulation with PHM
(a)
05 1 2 4 8 16 32 6410ndash4
10ndash3
10ndash2
10ndash1
100
Frequency (Hz)
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)X 2818Y 0037
Experiment with PRMSimulation with PRMSimulation with PHM
(b)
Experiment with PRMSimulation with PRMSimulation with PHM
05 1 2 4 8 16 32 6410ndash5
10ndash4
10ndash3
10ndash2
10ndash1
100
Frequency (Hz)
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3)
X 2818Y 0007
(c)
Experiment with PRMSimulation with PRMSimulation with PHM
03
0
06
09
12
Wei
ghte
d RM
S va
lues
ϕc θczs
0794mmiddotsndash2
0657mmiddotsndash20713mmiddotsndash2
0323radmiddotsndash20396radmiddotsndash2
0446radmiddotsndash2
0085radmiddotsndash2
0150radmiddotsndash2
0131radmiddotsndash2
Degrees of freedom
(d)
Figure 4e experimental and simulation results under an excitation frequency 28Hz of the drum [1] (a) PSD acceleration response of thevertical driverrsquos seat (b) PSD acceleration response of the cabrsquos pitch angle (c) PSD acceleration response of the cabrsquos roll angle (d)Weighted RMS values of the driverrsquos seat and the cab
Shock and Vibration 5
3 Design of the Optimal Fuzzy-PID Controller
31 Modeling of the Optimal Fuzzy-PID Control e PIDcontrol is one of the controllers with not only a simplestructure but also robust performance and it is generallyused in industrial process control However the perfor-mance of PID control depends on the appropriate selectionof the PIDrsquos parameters e well-known Ziegler-Nicholstechnique has been used to choose the PIDrsquos parametersHowever it is only efficient when the system works at thedesigned operating condition Contrariwise the fuzzy logiccontrol (FLC) does not depend on the designed operatingcondition it only depends on the appropriate selection of thefuzzy inference system (FIS) However the shortcomings ofFLC are low precision and stability In order to avoidshortcomings of both FLC and PID control fuzzy-PIDcontrol had been developed [18 20 24] In this study toenhance the control performance of fuzzy-PID control(FPC) the control rules in FIS optimized via the geneticalgorithm (GA) program are then developed and applied forthe FPCrsquos optimization
In the cabrsquos isolationmounts there are four SHMs whichshould be separately controlled thus four optimal fuzzy-PID controls should be designed However the designprocess of these controls is the same erefore a specific ofthe optimal FPC is designed to control the active dampingforce of MR fluid e model of the optimal FPC for SHM isdepicted in Figure 5(a)
In Figure 5(a) fuzzy-PID control includes two inputsand three outputs in which 2 inputs denoted by E and EC arethe vertical displacement error (E) and the vertical velocityerror (EC) of the cab frame and 3 outputs denoted byKpprime Kiprime andKdprime are the proportionality factors respectivelye proportional integral and derivative parameters in PIDcontrol are defined by Kp Ki and Kd which can be auto-matically tuned and depend on the parametersKpprime Kiprime andKdprime of the FLC and the actual control force ofMR fluid u(t) is decided by the PID control the control forcefd of SHM is then used for subsystem of the vehicle In orderto enhance the further performance of the FPC the GAprogram is used to optimize the control rules in FIS via thesubsystem of the vehicle and the objective functions
e force output of the PID control is given by
u(t) Kpe(t) + Ki 1113946t
0e(t)dt + Kd _e(t) (5)
where e(t) is the displacement error the cab framee initial values of proportionality factors in equation
(5) determined by the Ziegler-Nichols method via thesubsystem model are Kp(0) 1985 Ki(0) 18 and Kd(0)
12 In order to find the best values for Kp Ki and Kd weassume their variable ranges as [KpminKpmax] [KiminKimax]and [Kdmin Kdmax] respectively us based on the initialvalues the range of each parameter is chosen by Kp isin [1002500] Ki isin [1 100] and Kd isin [01 10]
e next is a design of the FLC e basic fuzzy controlconsists of the following major parts fuzzification interfaceFIS and defuzzification interface First the crisp values infuzzification are transformed into linguistic variables FIS is
then used by control rules in accordance with inferencerules and finally the linguistic variables are transformedback to crisp values through defuzzification for use by thephysical plant [25] erefore the FPC can be designed inthree steps below
(i) Choosing the fuzzy control input-output two inputvariables E and EC belong to [minus025 025] Besidesthree output variables Kpprime Kiprime andKdprime are calibratedover the interval [0 1] as follows [24]
Kpprime
Kp minusKpmin
Kpmax minusKpmin
Kiprime
Ki minusKimin
Kimax minusKimin
Kdprime
Kd minusKdmin
Kdmax minusKdmin
(6)
Hence the input values in equation (5) are re-spectively Kp 2400Kpprime + 100 Ki 99Kiprime + 1 andKd 99Kdprime + 01e linguistic variables of two inputs are defined bythe positive big (PB) positive small (PS) zero (ZO)negative small (NS) and negative big (NB) Besidesthe linguistic variables of three outputs are alsodefined as small (S) medium small (MS) medium(M) medium big (MB) and big (B) respectively
(ii) Membership function the shape of membershipfunctions of input-output variables is used by thetriangular function and its degree of membership isbetween 0 and 1 as shown in Figure 5(b)
(iii) e FISrsquos rules the initial control rules are given bythe designerrsquos knowledge and experience as follows
(1) If E is NB and EC is NB then Kpprime is MS Kiprime is Sand Kdprime is S
(2) If E is NB and EC is NS then Kpprime isM Kiprime is MSand Kdprime is S
(25) If E is PB and EC is PB then Kpprime is B Kiprime is MBand Kdprime is MB
where FIS is selected by the minimum function andthe centroid method of Mamdani and Assilian [25]and the above control rules are then optimized byGA program through the subsystem model
32 Optimization of the Control Rules Based on theGA Program
321 GA Program GA is an optimization method based onprinciples of natural selection It seeks the maximum or theminimum values of one or more objective functions usingcomputational techniques motivated by biological re-production erefore GA is defined as finding a vector ofdecisive variables that satisfies constraints to give acceptablevalues to all objective functions [26 27] and it can be writtenas follows
6 Shock and Vibration
Find the vector x [x1 x2 xn]T to optimize
F(x) f1(x) f2(x) fn(x)[ ]Tsubject togi(x)le 0 i 1 2 p
hj(x) 0 j 1 2 q
(7)
where F(x) is the vector of objective functions which mustbe either maximized or minimized and p and q are numbersof inequality constraints and equality constraints
GA is structured into the following steps encodingpopulation initialization tness evaluation parent selectiongenetic operations (crossover and mutate) and terminationcriterione ow chart of the GA program for SHM is builtin Figure 6
322 Application of GA Program to Optimize the ControlRules e goal main of GA is to seek the optimal controlrules in FIS to get the minimum values of the weighted RMSacceleration responses of the vertical driverrsquos seat cabrsquospitch and roll vibrations via the subsystem model inFigure 5(a) erefore GArsquos structure is built as follows
(i) Encoding mechanism and initial population in ldquo(iii)e FISrsquos rulesrdquo there are 25 control rules thatcontain a total of 75 elements e 75 elements arethen connected into a string of numbers as achromosome which is regarded as a vectorEncoding mechanism can shorten the chromosomelength of the individuals in population space toenhance the running speed and to reduce thesearching space of the algorithm program us thelinguistic variables of two inputs (E and EC) areencoded by the numbers as [NB NS ZO PS PB][0 1 2 3 4] [aj]1times5 and the linguistic variables ofthree outputs (Kpprime Kiprime andKdprime) are encoded by thenumbers as [S MS M MB B] [5 6 7 8 9] [bj]1times5 Besides the individuals in the initial pop-ulation are randomly generated For each gene thevalue of that gene is also selected as a randompositive integer in the range of 0le ajle 4 and5le bjle 9 and the size of the initial population is 100
(ii) Objective function and tness value the minimumvalues of the weighted RMS acceleration responses(awl) of the vertical driverrsquos seat cabrsquos pitch and rollvibrations are selected as objective functions in this
study e expression of objective functions iswritten in equation (9) In order to nd the mini-mum values of the weighted RMS acceleration re-sponses the tness value J is greatly simplied tocalculate objective functions as follows [20 27]
J 1
sum αla2wl (8)
where subscript l refers to the vertical driverrsquos seat(zs) cabrsquos pitch (ϕc) or cabrsquos roll (θc) vibrations andαl is the scalar that weighted or percent of theweighted RMS values in le individuals with the higher tness value Jwhichis obtained via the subsystem model show that theobtained control rules in ldquo(iii) e FISrsquos rulesrdquo arebetter erefore the resultant individuals areupdated before the evolution process ends and theoptimal individuals can be obtained
(iii) Genetic operations after establishing the initialpopulation and selecting the parents Genetic oper-ations (including crossover and mutation) are thenperformed Herein crossover probability of 095 andmutation probability of 005 have been used in 200
Subsystem ofvibratory roller
SHM withRM damper
Fuzzy
FIS
GA(J)Off-road terrain
EECfd
u(Desired)
awzsawϕcawθc
PID control
(Kpprime Ki
prime Kdprime)
(a)
Kprime
p
Kprime
i
Kprime
d
Control rules(Mamdani)
E
EC
(b)
Figure 5 Structure of the vehicle model with SHM (a) Optimal fuzzy-PID control model (b) FLC control
Yes
No
Initialize population
Select parents
Update FIS and simulatethe Simulink system
Evolutionalnumber of times
End
Initialize parents and establish FIS
Start
Crossover
Mutation
Gen
etic
ope
ratio
ns
Selection
Evaluate the fitnessvalues of individuals
Output the control rulecode and fitness curve
Acceptance function
Figure 6 e ow chart of the GA program for SHM
Shock and Vibration 7
generations erefore the arithmetic crossover isperformed on 95 of the selected parents wherebytwo children are created from the weighted sum oftwo parents and children of the remaining 5 ofselected parents are exact copies of the parentsCrossover operation is performed until the pop-ulation number is doubled en each individualundergoes the mutation operation which is theprocess of randomly changing the values of genes in achromosomewith a probability of 005emutationcan create new genetic material into an existingindividual and add diversity to the genetic charac-teristics of the population Finally through the fitnessvalue J only the optimal individuals are selected atthe end of each generation to exist as the populationof the next generation For the termination criterionthe limitary generation is used then the resultantpopulation is evaluated to determine convergence
323 Optimal Result of the Control Rules In order to seekthe optimal control rules for the FPC we assume that thevibratory roller travels on the deformable terrain at a constantspeed v0 167mmiddotsminus1 and off-road terrain excitation input q(t)of the subsystem model is chosen as in Figure 3(a) with thesimulation time of 10 se scalar that weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibrations areαz 0486 αϕ 0449 and αθ 0065 respectively which aredecided based on the percent of the weighted RMS value of thevertical driverrsquos seat (486) cabrsquos pitch (449) and cabrsquos rollvibrations (65) with the weighted RMS values of the PHM inTable 1 e maximum generation is 200
e result in Figure 7 shows that the maximum fitnessvalue J is obtained from the evolutionary generation of 133to the end erefore the optimal individuals can be ob-tained at the generation of 133 By recording the optimalcontrol rules in FIS are listed in Table 2 e optimal controlrules are then used for the optimal FPC to simulate andanalyze the low-frequency performance of semi-active cabrsquoshydraulic mounts
4 Results and Discussion
41 Evaluation Criteria e performance of the vehiclesuspension system is evaluated by three main indices in thetime domain including the ride comfort working space androad holding characteristics
Among these three indices the ride comfort perfor-mance evaluated via the weighted RMS acceleration re-sponse is considered to be the most important index [1] Inaddition in the international standard ISO 2631-1 [12] thePSD acceleration response is also applied to estimate theeffect of vibration on the endurance limit of the human bodyin the frequency domain It was suggested that a low-frequency range of 4ndash10Hz for the vertical and of 05ndash2Hz for the rotational vibrations seriously affected thedriverrsquos health and safety In this study the performance ofSHM also is evaluated through both the PSD and theweighted RMS acceleration responses of the vertical driverrsquos
seat cabrsquos pitch and roll vibrations in the frequency andtime domains us the smaller PSD and weighted RMSvalues mean to be the better ability of the correspondingisolation mounts e expression of RMS was given by
awl
1T
1113946T
0euroxl(t)1113858 1113859
2dt
1113971
(9)
where euroxl(t) is the acceleration response in the l as a functionof time and T 50 s is the time of simulation
42 Control Performance When the Vehicle Travels on theDeformableTerrain In this study the vehicle is assumed to betraveling on a terrain type of Grenville loam given by Wong[28] at a constant speed v0 167mmiddotsminus1 e Grenville loamrsquosparameters including n 101 kc 006times103Nmiddotmminus(n+1)kφ 5880times103Nmiddotmminus(n+2) c 31times 103 Pa φ 298deg and itsoff-road terrain irregularity as in Figures 3(a) are the randomexcitation inputs of the simulatingmodel Simulations are thencarried out to analyze the low-frequency performance of SHMbased on the design parameters of a single drum vibratoryroller [1]
A good cabrsquos isolation system should be able to minimizeits deflection and acceleration to enhance the driverrsquos ridecomfort In addition the driverrsquos mental and physical healthis affected not only by the acceleration responses in the timeregion but also by the PSD acceleration responses in the low-frequency region [11]erefore the maximum PSD and theweighted RMS values of the vertical driverrsquos seat cab pitchand roll vibrations are respectively given to compare thelow-frequency performance of SHM
e simulation results of the PSD acceleration responsesof the vertical driverrsquos seat cabrsquos pitch and roll vibrations areplotted in Figures 8(a)ndash8(c) respectively In Figure 8 theresonance frequencies of PSD acceleration responses of thevertical driverrsquos seat cabrsquos pitch and roll vibrations withSHM without optimization and with optimization have notbeen changed in comparison with PHM is can be due tothe fact that stiffness coefficients of the cabrsquos isolation systemare unchanged and its damping control forces have almostno effect on the resonance frequencies However themaximum resonance peaks of the PSD acceleration re-sponses are significantly transformed by the SHM
e maximum resonance peaks of the PSD accelerationresponses of the vertical driverrsquos seat cabrsquos pitch and rollvibrations of SHM without optimization are smaller thanPHM Meanwhile the maximum resonance peaks of the PSDacceleration responses of SHM with optimization are thesmallest Especially in low-frequency below 4Hz the maxi-mum PSD values of the vertical driverrsquos seat cabrsquos pitch androll vibrations of SHM with optimization are greatly reducedby 3297 2908 and 6440 in comparison with PHMrespectively is is due to the main impact of the semi-activedamping force of hydraulic mount fd ch| _z| _z + u ere-fore the health of the driver can be clearly improved by SHMusing the optimal fuzzy-PID controller
e simulation results of the acceleration responses arealso shown in Figures 9(a)ndash9(c) In Figure 9 we can see that
8 Shock and Vibration
the acceleration responses of SHM with optimization arelower than both PHM and SHM without optimizationBesides the weighted RMS acceleration responses in Table 1also show that the weighted RMS values of the verticaldriverrsquos seat cabrsquos pitch and roll vibrations of SHM withoptimization are strongly reduced by 3499 4256 and4172 in comparison with PHM respectively e aboveanalysis results indicate that when the vehicle travels on thedeformable terrain the driverrsquos ride comfort can be clearlyimproved by SHM with optimization in both the time andthe low-frequency region erefore the SHM with opti-mization could provide the best ride comfort performancefor the off-road vibratory roller in the condition of thevehicle traveling
43 Control Performance When the Vehicle Moves andCompacts on the Elastoplastic Soil Ground In the workingcondition of the vibratory roller the effect of the elastoplasticsoil grounds on the performance of the compaction processwas studied under the excitation frequencies of the drum in arange of 01ndash70Hz [2ndash4 9] the research results showed thatcomprehensive drumsoil contact and loss of contact data
had appeared over a range of 15ndash40Hz [4] especially at theexcitation frequencies of 285Hz and 33Hz of the drumwhich yielded the maximum compaction forces due toldquodouble-jumprdquo of the drum [2 9] Based on the designparameters of a single drum vibratory roller [1] the exci-tation frequency of the vibratory drum in the workingcondition was also given at 28 and 35Hz therefore theexcitation frequencies of the vibratory drum at 28 and 35Hzwith the parameters of the vehicle [1] are used for simulationBesides in compression process of the drum the elastoplasticsoil properties are changed during the interaction between therigid drum and soil ground e elastoplastic soil propertiesare represented via three different values of the plasticityparameter ε including low-density soil ε 034 medium-density soil ε 072 and high-density soil ε 087 [9]However the elastoplastic property of low-density soil(ε 034) is similar to the property of a soft soil deformationwhich is simulated in the condition of the vehicle travelingerefore in order to evaluate the low-frequency perfor-mance of SHM in the condition of the vehicle working thevehicle is moved and compacted at very slow speed 083mmiddotsminus1under a lowhigh excitation frequency 2835Hz of the vi-bratory drum on a high elastoplastic soil ground e
50 100 150 2001
15
2
25
3X 133Y 2579
Evolutionary generations
J
Figure 7 e curve of fitness value
Table 1 e weighted RMS acceleration responses on a deformable terrain
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 1063 0875 0691 3499awϕc (radmiddotsminus2) 0982 0810 0564 4256awθc (radmiddotsminus2) 0139 0100 0081 4172
Table 2 Result of the optimal control rules
ECE
Kpprime Kiprime Kdprime
NB NS ZO PS PB NB NS ZO PS PB NB NS ZO PS PB
NB M MB B MS S S S M MB S S M B MB BNS MB M MS M MS S B MB MS M MS S M M SZO M S S S M MS MS S M MB M B S S MSPS MS M MS M B MS S M MB S MB MS S MS MSPB S MS M MB MB M M MS S S MS B S S M
Shock and Vibration 9
PHMSHM without optimizationSHM with optimization
05 1 2 4 8 16 32 640
02
04
06
08
Frequency (Hz)
Vert
ical
acce
lera
tion
PSD
(m2 middotsndash3
)X 209Y 0558
X 209Y 0374
ndash3297
(a)
PHMSHM without optimizationSHM with optimization
0
02
04
06
X 209Y 0361
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 209Y 0256
ndash2908
05 1 2 4 8 16 32 64Frequency (Hz)
(b)
PHMSHM without optimizationSHM with optimization
0
01
X 259Y 0059
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3)
X 259Y 0021
ndash6440
05 1 2 4 8 16 32 64Frequency (Hz)
(c)
Figure 8 Results of the PSD acceleration responses on the deformable terrain (a) Vertical driverrsquos seat (b) Cabrsquos pitch angle (c) Cabrsquos rollangle
PHMSHM without optimizationSHM with optimization
45 46 47 48 49 50ndash4
ndash2
0
2
4
Time (s)
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
(a)
PHMSHM without optimizationSHM with optimization
ndash4
ndash2
0
2
4
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
45 46 47 48 49 50Time (s)
(b)
Figure 9 Continued
10 Shock and Vibration
PHMSHM without optimizationSHM with optimization
ndash03
ndash02
ndash01
0
01
02
03
Roll
acce
lera
tion
(rad
middotsndash2)
45 46 47 48 49 50Time (s)
(c)
Figure 9 Results of the acceleration responses on the deformable terrain (a) Vertical driverrsquos seat (b) Cabrsquos pitch angle (c) Cabrsquos roll angle
05 1 2 4 8 16 32 640
01
02
03
04
X 569Y 0074
Frequency (Hz)
Vert
ical
acce
lera
tion
PSD
(m2 middotsndash3
)
X 2818Y 0014
X 209Y 0376 ndash2446
PHMSHM without optimizationSHM with optimization
X 209Y 0284
(a)
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
X 2818Y 0033
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 569Y 0045
X 209Y 0197
X 209Y 0135
ndash3147
PHMSHM without optimizationSHM with optimization
(b)
05 1 2 4 8 16 32 64Frequency (Hz)
0
001
002
003
004
X 2818Y 0008
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3) X 249
Y 0032
X 269Y 0013 X 569
Y 0011
ndash5937
PHMSHM without optimizationSHM with optimization
(c)
Figure 10 Results of the PSD acceleration responses under a low excitation frequency 28Hz of the drum (a) Vertical driverrsquos seat (b)Cabrsquos pitch angle (c) Cabrsquos roll angle
Shock and Vibration 11
parameters of the high elastoplastic soil ground includesε 087 ksp 283times106Nmiddotmminus1 kse 423times106Nmiddotmminus1 andcse 371times 103Nsmiddotmminus1
e comparison results of the PSD acceleration responsesof the vertical driverrsquos seat cabrsquos pitch and roll vibrations withthe cabrsquos isolation systems at a lowhigh excitation frequency2835Hz of the vibratory drum are seen in Figures 10 and 11Similarly in the condition of the vehicle traveling the res-onance frequencies of PSD acceleration responses of thevertical driverrsquos seat cabrsquos pitch and roll vibrations of SHMwithout optimization and SHM with optimization are alsounchanged in comparison with PHM e simulation resultsalso show that the resonance frequencies of SHM withoutoptimization and SHMwith optimization also occur at 28183518Hz comparable with PHM in all three directions iscan be due to the effect of the resonance at a lowhigh ex-citation frequency 2835Hz of the vibratory drum In ad-dition the resonance frequency of the acceleration PSDresponses of all cabrsquos isolation systems clearly appears at569Hz in both graphs of Figures 10 and 11 whereas thisresonance frequency does not occur in the graph of Figure 8
is particularity may be due to the effect of the soil stiffnesswith the high-density soil ground
Besides at a low-frequency range below 4Hz themaximum resonance peaks of the PSD acceleration re-sponses of the vertical driverrsquos seat cabrsquos pitch and rollvibrations of SHMwith optimization are strongly reduced incomparison with PHM by 2446 3147 and 5937 at alow excitation frequency 28Hz of the drum and by 17763352 and 5385 at a high excitation frequency 35Hz ofthe drum respectively is is also due to the main impact ofthe semi-active damping force of hydraulic mountfd ch| _z| _z + u Contrarily at a frequency range upper 4Hzthe PSD acceleration responses of the vertical driverrsquos seatcabrsquos pitch and roll vibrations of SHMwithout optimizationand SHM with optimization are slightly increased incomparison with PHM especially at the resonance fre-quency of 569Hz However the PSD acceleration values arevery small erefore the driverrsquos health can be clearlyimproved by using SHM with optimization in the low-frequency region when the vehicle moves and compactson an elastoplastic soil ground
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
03
04Ve
rtic
al ac
cele
ratio
n PS
D (m
2 middotsndash3)
X 3518Y 00018
X 569Y 0031
X 209Y 0321
X 209Y 0264
ndash1776
PHMSHM without optimizationSHM with optimization
(a)
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 3518Y 0015
X 569Y 0019
X 209Y 0182
X 209Y 0121
ndash3352
PHMSHM without optimizationSHM with optimization
(b)
05 1 2 4 8 16 32 64Frequency (Hz)
0
001
002
003
004
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3)
X 569Y 0004
X 249Y 0026
X 3518Y 00035
X 269Y 0012
ndash5385
PHMSHM without optimizationSHM with optimization
(c)
Figure 11 Results of the PSD acceleration responses under a high excitation frequency 35Hz of the drum (a) Vertical driverrsquos seat (b)Cabrsquos pitch angle (c) Cabrsquos roll angle
12 Shock and Vibration
45 46 47 48 49 50ndash2
ndash1
0
1
2
Time (s)
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(a)
45 46 47 48 49 50Time (s)
ndash1
ndash05
0
05
1
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(b)
45 46 47 48 49 50Time (s)
ndash01
ndash005
0
005
01
Roll
acce
lera
tion
(rad
middotsndash2)
PHMSHM without optimizationSHM with optimization
(c)
Figure 12 Results of the acceleration responses under a low excitation frequency 28Hz of the drum (a) Vertical driverrsquos seat (b) Cabrsquospitch angle (c) Cabrsquos roll angle
45 46 47 48 49 50Time (s)
ndash2
ndash1
0
1
2
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(a)
45 46 47 48 49 50Time (s)
ndash1
ndash05
0
05
1
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(b)
Figure 13 Continued
Shock and Vibration 13
e simulation results in Figures 12 and 13 also showthat the acceleration responses of the vertical driverrsquos seatcabrsquos pitch and roll vibrations of SHM with optimizationare lower than both PHM and SHM without optimizationBesides the values of the weighted RMS accelerationresponses are also listed in Tables 3 and 4 e weightedRMS values of the vertical driverrsquos seat cabrsquos pitch androll vibrations of SHM with optimization are greatly re-duced in comparison with SHM by 3516 4829 and3765 under a low excitation frequency 28 Hz of thedrum and by 2480 4315 and 3606 under a highexcitation frequency 35 Hz of the drum respectivelyConsequently the above analysis results also indicate thatthe driverrsquos ride comfort and health are strongly improvedby SHM with optimization when the vehicle moves andcompacts on the high elastoplastic soil ground under boththe lowhigh excitation frequency 2835 Hz of the vi-bratory drum
5 Conclusions
Modeling and low-frequency performance analysis of semi-active cabrsquos hydraulic mounts of the off-road vibratory rollerare addressed in this work e comparison between thesimulation and test results of passive cabrsquos isolation mounts
is also carried out e low-frequency performance of SHMusing the optimal fuzzy-PID controller is then evaluatedthrough the PSD acceleration and weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibrations inboth the frequency and time domains e results aresummarized as follows
(1) In the condition of the vehicle traveling the weightedRMS acceleration responses and the PSD accelera-tion responses of the vertical driverrsquos seat cabrsquos pitchand roll vibrations of SHM with optimization arelower than both PHM and SHM without optimi-zation Particularly the weighted RMS values ofSHM with optimization are strongly reduced incomparison with PHM by 3499 4256 and4172 respectively
(2) In condition of the vehicle working both PSD ac-celeration responses and the weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibra-tions of SHM using the optimal fuzzy-PID controllerare clearly smaller comparable with both PHM andSHM without optimization under both lowhighexcitation frequency 2835Hz of the drum on thehigh elastoplastic soil ground Especially the maxi-mum PSD values of the vertical driverrsquos seat cabrsquos
45 46 47 48 49 50Time (s)
ndash01
ndash005
0
005
01
Roll
acce
lera
tion
(rad
middotsndash2)
PHMSHM without optimizationSHM with optimization
(c)
Figure 13 Results of the acceleration responses under a high excitation frequency 35Hz of the drum (a) Vertical driverrsquos seat (b) Cabrsquospitch angle (c) Cabrsquos roll angle
Table 3 e weighted RMS values under a low excitation frequency 28Hz of the drum
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 0657 0501 0426 3516awϕc (radmiddotsminus2) 0323 0184 0167 4829awθc (radmiddotsminus2) 0085 0056 0053 3765
Table 4 e weighted RMS values under a high excitation frequency 35Hz of the drum
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 0512 0453 0385 2480awϕc (radmiddotsminus2) 0241 0162 0137 4315awθc (radmiddotsminus2) 0061 0040 0039 3606
14 Shock and Vibration
pitch and roll vibrations of SHM with optimizationare strongly reduced by 2446 3147 and 5937in comparison with PHM when the vehicle compactsat a low excitation frequency 28Hz of the drum
(3) e above analysis results indicate that the low-frequency and high-stiffness characteristics of SHMusing the optimal fuzzy-PID controller have the besteffect on isolating low-frequency vibration trans-mitted and controlling the cab shaking under variousoperating conditions of the off-road vibratory roller
Data Availability
e data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] V Liem J Zhang V Quynh and R Jiao ldquoVibration analysisand modeling of an off-road vibratory roller equipped withthree different cabrsquos isolation mountsrdquo Shock and Vibrationvol 2018 Article ID 8527574 17 pages 2018
[2] D Adam and F Kopf ldquoeoretical analysis of dynamicallyloaded soilsrdquo in Proceedings of the European WorkshopCompaction of Soils and Granular Materials pp 207ndash217Paris France 2000
[3] J Li Z Zhang H Xu and Z Feng ldquoDynamic characteristicsof the vibratory roller test-bed vibration isolation systemsimulation and experimentrdquo Journal of Terramechanicsvol 56 pp 139ndash156 2014
[4] J Paul and A Michael ldquoCapturing nonlinear vibratory rollercompactor behavior through lumped parameter modelingrdquoJournal of Engineering Mechanics vol 134 no 8 pp 684ndash6932008
[5] X Zhang Modelling simulation and optimization of ridecomfort for off road articulated dump trucks PhD thesisSoutheast University Nanjing China 2010
[6] A Pakowski and D Cao ldquoEffect of soil deformability on off-road vehicle ride dynamicsrdquo SAE International Journal ofCommercial Vehicles vol 6 no 2 pp 362ndash371 2013
[7] R A Irani R J Bauer and A Warkentin ldquoDynamic wheel-soil model for lightweight mobile robots with smooth wheelsrdquoJournal of Intelligent amp Robotic Systems vol 71 no 2pp 179ndash193 2013
[8] S Park A A Popov and D J Cole ldquoInfluence of soil de-formation on off-road heavy vehicle suspension vibrationrdquoJournal of Terramechanics vol 41 no 1 pp 41ndash68 2004
[9] A Kordestani S Rakheja P Marcotte A Pazooki andD Juras ldquoAnalysis of ride vibration environment of soilcompactorsrdquo SAE International Journal of Commercial Ve-hicles vol 3 no 1 pp 259ndash272 2010
[10] V Quynh Vibration study and control for cab of vibratoryroller PhD thesis Southeast University Nanjing China2013
[11] M Griffin Handbook of Human Vibration Academic PressLondon UK 1990
[12] International Organization for Standardization ldquoMechanicalvibration and shock-evaluation of human exposure to wholebody vibration-part 2 general requirementsrdquo Tech Rep ISO2631-11997 ISO Geneva Switzerland 1997
[13] S Yildirim ldquoVibration control of suspension systems using aproposed neural networkrdquo Journal of Sound and Vibrationvol 277 no 4-5 pp 1059ndash1069 2004
[14] N Ebrahimi and A Gharaveisi ldquoOptimal fuzzy supervisorcontroller for an active suspension systemrdquo InternationalJournal of Soft Computing amp Engineering vol 2 no 4pp 36ndash39 2012
[15] Z Xie P Wong J Zhao T Xu and I Wong ldquoA noise-insensitive semi-active air suspension for heavy-duty vehicleswith an integrated fuzzy-wheelbase preview controlrdquo Math-ematical Problem in Engineering vol 2013 Article ID 12195312 pages 2013
[16] B Kasemi A G A Muthalif M M Rashid and S FathimaldquoFuzzy-PID controller for semi-active vibration control usingmagnetorheological fluid damperrdquo Procedia Engineeringvol 41 pp 1221ndash1227 2012
[17] T Nguyen A novel semi-active magnetorheological mount forvibration isolation PhD thesis e University of ToledoToledo OH USA 2009
[18] A Muthalif B Kasemi D Nordin and M Rashid ldquoSemi-active vibration control using experimental model of Mag-netorheological damper with adaptive fuzzy-PID controllerrdquoSmart Structures and Systems vol 20 no 1 pp 85ndash97 2017
[19] S D Nguyen Q H Nguyen and S-B Choi ldquoA hybridclustering based fuzzy structure for vibration control-part 2an application to semi-active vehicle seat-suspension systemrdquoMechanical Systems and Signal Processing vol 56-57pp 288ndash301 2015
[20] W Wang Y Song Y Xue H Jin J Hou and M Zhao ldquoAnoptimal vibration control strategy for a vehiclersquos active sus-pension based on improved cultural algorithmrdquo Applied SoftComputing vol 28 pp 167ndash174 2015
[21] Y Chen Z Wang J Qiu and Z Huang ldquoHybrid fuzzyskyhook surface control using multi-objective microgeneticalgorithm for semi-active vehicle suspension system ridecomfort stability analysisrdquo Journal of Dynamic SystemsMeasurement amp Control vol 134 no 4 pp 1ndash14 2012
[22] International Organization for Standardization ldquoReportingvehicle road surface irregularitiesrdquo Tech Rep ISOTC108SC2WG4 N57 ieme Medical Publishers Stuttgart Germany1982
[23] M Mitschke Dynamik der Kraftfahrzeuge Springer-VerlagBerlin Germany 1972
[24] M Rahmat ldquoApplication of selftuning fuzzy PID controlleron industrial hydraulic actuator using system identificationapproachrdquo International Journal on Smart Sensing amp In-telligent Systems vol 2 no 2 pp 246ndash261 2009
[25] E H Mamdani and S Assilian ldquoAn experiment in linguisticsynthesis with a fuzzy logic controllerrdquo International Journalof Man-Machine Studies vol 7 no 1 pp 1ndash13 1975
[26] Z Nariman M Salehpour A Jamali and E HanghgooldquoPareto optimization of a five-degree of freedom vehicle vi-bration model using a MUGArdquo Engineering Applications ofArtificial Intelligence vol 23 no 4 pp 543ndash551 2010
[27] H John G Michael and D Gregory ldquoMulti-objective controloptimization for semi-active vehicle suspensionsrdquo Journal ofSound and Vibration vol 330 pp 5502ndash5516 2011
[28] J Y Wong ldquoData processing methodology in the charac-terization of the mechanical properties of terrainrdquo Journal ofTerramechanics vol 17 no 1 pp 13ndash41 1980
Shock and Vibration 15
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

22 Mathematical Model for the Cabrsquos Isolation MountsBoth the PRM and the PHM as plotted in Figures 1(b) and1(c) and their lumped parameter models described as inFigure 2(b) were studied via the simulation and experiment[1] Herein kr and cr are linear stiness and damping co-ecient of the main rubber mount and a liquid dampingforce fd ch| _z| _z is expressed as the damping characteristic
of a quadratic nonlinearity in which ch is the dampingconstant of the hydraulic mount
In addition a new model of SHM for the vibratory rollerbased on the PHM is proposed in this study e basicstructure of an SHM includes a main rubber a dampingplate driven by the bolt and a closed chamber lled with theuid However the uid used in the closed chamber is a
13
Cab
WheelRear frame DrumFront frame
Fc
zc
z
Rear frame
Fczf
X
Y
Z
To frameRubberTo cab
(b)
(c)
(d)(a)
Annular orificeMR fluid
Magnetic fieldDamping plate
Flux guide Electromagnet coil
Lower chamberAnnular orificeUpper chamber
Main rubber
Damping plate
Vibration isolation mounts
Cab
Orifice
z
Figure 1 Schematic of vibratory roller with dierent cabrsquos isolation mounts (a) Single drum vibratory roller (b) Passive rubber mount (c)Passive hydraulic mount (d) Semi-active hydraulic mount
zcϕc
zffzrfFc3 Fc1
v0
Fd
l4
l6l7
l2l3
l8l5
mc
mrf ϕrf mffMdy
zsms l1
qd1
Fc1 Fc2
zc
b2 b3zff
mcθc
md
zdθd
b1zsms
qd2md
ωqd1
zd
qt1
cd1kd1 cd1kd1 cd2kd2
b5b4
cskscsks
kt1 ct1
θff mff
zt1
cse1kse1
ksp1cse1kse1
ksp1cse2
ksp2kse2
zse2zse1
Side view Front view
(a)
kr uch
Rear frame
cr
Passive rubber mount (PRM)Passive hydraulic mount (PHM)
Semi-active hydraulic mount (SHM)
z
zc
zf
Cab
(b)
Figure 2 Lumped parameter model of the vibratory roller and dierent cabrsquos isolation mounts (a) Vibratory roller dynamic model (b)Cabrsquos isolation mount model
Shock and Vibration 3
magnetorheological (MR) fluid with adjustable damping[16ndash18] e damping plate of the SHM is equipped with anelectromagnet coil and a flux guide When the coil current ischanging a magnetic field in the flux guide is also beingtransformed thus the viscosity of MR fluid in the annularorifice is simultaneously changing e result is that thevibration damping can be adjusted according to the differentroad surfaces MR fluid flows in the upper-lower chamberare also derived by the transfer of damping plate through theannular orifice and the orifices as seen in Figure 1(d) elumped parameter model of SHM is also represented by alinear stiffness kr and damping cr coefficients of the mainrubber and a semi-active damping force of hydraulic mountfd ch| _z| _z + u Herein u is an active damping force of MRfluid which is controlled by an optimal fuzzy-PID controlleras shown in Figure 2(b)
e corresponding dynamic force at mount i of the cabrsquosisolation mounts in the vertical direction is given by
Fci kri zci minus zrf i( 1113857 + cri _zci minus _zrf i( 1113857 + fdi
fdi
0 with PRM
chi _zci minus _zrf i1113868111386811138681113868
1113868111386811138681113868 _zci minus _zrf i( 1113857 with PHM
chi _zci minus _zrf i1113868111386811138681113868
1113868111386811138681113868 _zci minus _zrf i( 1113857 + ui with SHM
⎧⎪⎪⎪⎨
⎪⎪⎪⎩
zci zc +(minus1)αlα+1ϕc +(minus1)
ibδθc
zrf i zrf minus lυϕrf +(minus1)ibδθrf
_zci _zc +(minus1)αlα+1
_ϕc +(minus1)ibδ
_θc
_zrf i _zrf minus lυ_ϕrf +(minus1)
ibδ
_θrf
(2)
where zci zrfi and _zci _zrf i are the displacements and thevelocities of the cab frame and the rear frame at mount i ofthe isolation mounts When i 1-2 then α 1 υ 5 andδ i+ 1 when i 3-4 then α 2 υ 4 and δ iminus 1
23 Random Excitation of the Off-Road Terrain SurfaceIn actual operating conditions the excitation forces of thevibratory roller are strongly affected by the rough terrainsurfaces apart from wheels-deformable terrain interactionse terrain behaviour under wheel-soil contact is nonlinearus the off-road vibratory rollers must be studied in thefrequency domain apart from the traditional time domain toanalyze the influence of excitation on the ride response Off-road terrain surface in the frequency domain is calculated viathe PSD value [6]e spatial PSD of the road surface profileS(Ω) is described as a function of the spatial frequency Ω(cyclemiddotmminus1) e spectral density of off-road terrain is thuswritten in accordance with ISO proposal [22] over thedifferent spatial frequency ranges by
S(Ω) S Ω0( 1113857ΩΩ0
1113888 1113889
minusw0
(3)
where w0 3 forΩleΩ0 and w0 225 forΩgtΩ0 the valueS(Ω0) provides a measure for the random terrain with thereference spatial frequency Ω0 12π cyclemiddotmminus1
More specifically assuming the vehicle moves with aconstant speed v0 the off-road terrain irregularities in thetime domain can then be simulated by the series
q(t) 1113944N
i1si sin iΔωt + ϕi( 1113857 (4)
where N is the number of intervals and si 2S(iΔn)Δn
1113968is
the amplitude of each the excitation harmonic in which S isthe target spectral density Δn 2πL and L is the length ofthe road segment φi is a random phase uniformly distrib-uted between 0 and 2π and ΔωΔnv0 is the fundamentaltemporal frequency Mitschke [23] extended the spectraldensity ranges for the unpaved off-road classifications apartfrom the traditional asphalt road classifications includingthe classification ranges from good to very poor and thedesired terrain roughness can be yielded by choosing a valuein the spectral density ranges
In order to develop an off-road terrain roughness inputclosing to the actual terrain condition the simulation pa-rameters used for generating the time domain of a roughterrain surface as shown in Figure 3(a) are a type of pooroff-road classification with v0 167mmiddotsminus1 L 84mΔt 0005 s w0 214 and S(Ω0) 37825times10minus6m3middotcycleminus1Its spectral density obtained from the time domain is alsodepicted in Figure 3(b) e frequency region of the inputsignal is mainly below 10Hz
24 Experimental Model Results In order to validate theaccuracy of the mathematical model of the off-road vi-bratory roller experiments and simulations were carriedout with cabrsquos isolation systems when the vehicle movedand compacted at a speed v0 083mmiddotsminus1 on a poor elas-toplastic terrain surface at the excitation frequency 28Hzof the drum [1] e comparison results are shown inFigure 4 With PRM as plotted in Figures 4(a)ndash4(c)comparisons of simulation and experimental results of thePSD acceleration responses are show that the simulationresults almost agree with the tests as to the frequency of thevarious peaks in the responses and the trend In additionthe weighted RMS values of the vertical driverrsquos seat cabrsquospitch and roll vibrations of PRM as shown in Figure 4(d)are deviated small by 1020 1121 and 1267 incomparison with the measured values It implies that themathematical model of the vibratory roller is the accurateand feasible model
In addition simulation results with PHM showed thatboth PSD acceleration responses and the weighted RMSvalues of the vertical driverrsquos seat cabrsquos pitch and rollvibrations are greatly reduced and the PHM has almost noeffect on the resonance frequencies in comparison withPRM under the various operating conditions ereforethe model of the off-road vibratory roller using PHM notonly enhances the vehiclersquos ride comfort but also providesthe accurate and feasible model for low-frequency per-formance analysis of the semi-active cabrsquos hydraulicmounts (SHMs)
4 Shock and Vibration
0 10 20 30 40 50ndash004
ndash002
0
002
004
Time (s)
Rand
om te
rrai
n (m
)
Off-road terrain roughness
(a)
10ndash1 100 10110ndash8
10ndash6
10ndash4
10ndash2
100
Frequency (Hz)
Off-
road
PSD
(m2 middotH
zndash1)
Simulated terrain PSD
Poor target PSD
(b)
Figure 3 Generation of the o-road terrain roughness according to unpaved o-road classication (a) O-road terrain prole (b) Spectraldensities
05 1 2 4 8 16 32 6410ndash4
10ndash3
10ndash2
10ndash1
100
Frequency (Hz)
X 2818Y 0004
Vert
ical
acce
lera
tion
PSD
(m2 middotsndash3
)
Experiment with PRMSimulation with PRMSimulation with PHM
(a)
05 1 2 4 8 16 32 6410ndash4
10ndash3
10ndash2
10ndash1
100
Frequency (Hz)
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)X 2818Y 0037
Experiment with PRMSimulation with PRMSimulation with PHM
(b)
Experiment with PRMSimulation with PRMSimulation with PHM
05 1 2 4 8 16 32 6410ndash5
10ndash4
10ndash3
10ndash2
10ndash1
100
Frequency (Hz)
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3)
X 2818Y 0007
(c)
Experiment with PRMSimulation with PRMSimulation with PHM
03
0
06
09
12
Wei
ghte
d RM
S va
lues
ϕc θczs
0794mmiddotsndash2
0657mmiddotsndash20713mmiddotsndash2
0323radmiddotsndash20396radmiddotsndash2
0446radmiddotsndash2
0085radmiddotsndash2
0150radmiddotsndash2
0131radmiddotsndash2
Degrees of freedom
(d)
Figure 4e experimental and simulation results under an excitation frequency 28Hz of the drum [1] (a) PSD acceleration response of thevertical driverrsquos seat (b) PSD acceleration response of the cabrsquos pitch angle (c) PSD acceleration response of the cabrsquos roll angle (d)Weighted RMS values of the driverrsquos seat and the cab
Shock and Vibration 5
3 Design of the Optimal Fuzzy-PID Controller
31 Modeling of the Optimal Fuzzy-PID Control e PIDcontrol is one of the controllers with not only a simplestructure but also robust performance and it is generallyused in industrial process control However the perfor-mance of PID control depends on the appropriate selectionof the PIDrsquos parameters e well-known Ziegler-Nicholstechnique has been used to choose the PIDrsquos parametersHowever it is only efficient when the system works at thedesigned operating condition Contrariwise the fuzzy logiccontrol (FLC) does not depend on the designed operatingcondition it only depends on the appropriate selection of thefuzzy inference system (FIS) However the shortcomings ofFLC are low precision and stability In order to avoidshortcomings of both FLC and PID control fuzzy-PIDcontrol had been developed [18 20 24] In this study toenhance the control performance of fuzzy-PID control(FPC) the control rules in FIS optimized via the geneticalgorithm (GA) program are then developed and applied forthe FPCrsquos optimization
In the cabrsquos isolationmounts there are four SHMs whichshould be separately controlled thus four optimal fuzzy-PID controls should be designed However the designprocess of these controls is the same erefore a specific ofthe optimal FPC is designed to control the active dampingforce of MR fluid e model of the optimal FPC for SHM isdepicted in Figure 5(a)
In Figure 5(a) fuzzy-PID control includes two inputsand three outputs in which 2 inputs denoted by E and EC arethe vertical displacement error (E) and the vertical velocityerror (EC) of the cab frame and 3 outputs denoted byKpprime Kiprime andKdprime are the proportionality factors respectivelye proportional integral and derivative parameters in PIDcontrol are defined by Kp Ki and Kd which can be auto-matically tuned and depend on the parametersKpprime Kiprime andKdprime of the FLC and the actual control force ofMR fluid u(t) is decided by the PID control the control forcefd of SHM is then used for subsystem of the vehicle In orderto enhance the further performance of the FPC the GAprogram is used to optimize the control rules in FIS via thesubsystem of the vehicle and the objective functions
e force output of the PID control is given by
u(t) Kpe(t) + Ki 1113946t
0e(t)dt + Kd _e(t) (5)
where e(t) is the displacement error the cab framee initial values of proportionality factors in equation
(5) determined by the Ziegler-Nichols method via thesubsystem model are Kp(0) 1985 Ki(0) 18 and Kd(0)
12 In order to find the best values for Kp Ki and Kd weassume their variable ranges as [KpminKpmax] [KiminKimax]and [Kdmin Kdmax] respectively us based on the initialvalues the range of each parameter is chosen by Kp isin [1002500] Ki isin [1 100] and Kd isin [01 10]
e next is a design of the FLC e basic fuzzy controlconsists of the following major parts fuzzification interfaceFIS and defuzzification interface First the crisp values infuzzification are transformed into linguistic variables FIS is
then used by control rules in accordance with inferencerules and finally the linguistic variables are transformedback to crisp values through defuzzification for use by thephysical plant [25] erefore the FPC can be designed inthree steps below
(i) Choosing the fuzzy control input-output two inputvariables E and EC belong to [minus025 025] Besidesthree output variables Kpprime Kiprime andKdprime are calibratedover the interval [0 1] as follows [24]
Kpprime
Kp minusKpmin
Kpmax minusKpmin
Kiprime
Ki minusKimin
Kimax minusKimin
Kdprime
Kd minusKdmin
Kdmax minusKdmin
(6)
Hence the input values in equation (5) are re-spectively Kp 2400Kpprime + 100 Ki 99Kiprime + 1 andKd 99Kdprime + 01e linguistic variables of two inputs are defined bythe positive big (PB) positive small (PS) zero (ZO)negative small (NS) and negative big (NB) Besidesthe linguistic variables of three outputs are alsodefined as small (S) medium small (MS) medium(M) medium big (MB) and big (B) respectively
(ii) Membership function the shape of membershipfunctions of input-output variables is used by thetriangular function and its degree of membership isbetween 0 and 1 as shown in Figure 5(b)
(iii) e FISrsquos rules the initial control rules are given bythe designerrsquos knowledge and experience as follows
(1) If E is NB and EC is NB then Kpprime is MS Kiprime is Sand Kdprime is S
(2) If E is NB and EC is NS then Kpprime isM Kiprime is MSand Kdprime is S
(25) If E is PB and EC is PB then Kpprime is B Kiprime is MBand Kdprime is MB
where FIS is selected by the minimum function andthe centroid method of Mamdani and Assilian [25]and the above control rules are then optimized byGA program through the subsystem model
32 Optimization of the Control Rules Based on theGA Program
321 GA Program GA is an optimization method based onprinciples of natural selection It seeks the maximum or theminimum values of one or more objective functions usingcomputational techniques motivated by biological re-production erefore GA is defined as finding a vector ofdecisive variables that satisfies constraints to give acceptablevalues to all objective functions [26 27] and it can be writtenas follows
6 Shock and Vibration
Find the vector x [x1 x2 xn]T to optimize
F(x) f1(x) f2(x) fn(x)[ ]Tsubject togi(x)le 0 i 1 2 p
hj(x) 0 j 1 2 q
(7)
where F(x) is the vector of objective functions which mustbe either maximized or minimized and p and q are numbersof inequality constraints and equality constraints
GA is structured into the following steps encodingpopulation initialization tness evaluation parent selectiongenetic operations (crossover and mutate) and terminationcriterione ow chart of the GA program for SHM is builtin Figure 6
322 Application of GA Program to Optimize the ControlRules e goal main of GA is to seek the optimal controlrules in FIS to get the minimum values of the weighted RMSacceleration responses of the vertical driverrsquos seat cabrsquospitch and roll vibrations via the subsystem model inFigure 5(a) erefore GArsquos structure is built as follows
(i) Encoding mechanism and initial population in ldquo(iii)e FISrsquos rulesrdquo there are 25 control rules thatcontain a total of 75 elements e 75 elements arethen connected into a string of numbers as achromosome which is regarded as a vectorEncoding mechanism can shorten the chromosomelength of the individuals in population space toenhance the running speed and to reduce thesearching space of the algorithm program us thelinguistic variables of two inputs (E and EC) areencoded by the numbers as [NB NS ZO PS PB][0 1 2 3 4] [aj]1times5 and the linguistic variables ofthree outputs (Kpprime Kiprime andKdprime) are encoded by thenumbers as [S MS M MB B] [5 6 7 8 9] [bj]1times5 Besides the individuals in the initial pop-ulation are randomly generated For each gene thevalue of that gene is also selected as a randompositive integer in the range of 0le ajle 4 and5le bjle 9 and the size of the initial population is 100
(ii) Objective function and tness value the minimumvalues of the weighted RMS acceleration responses(awl) of the vertical driverrsquos seat cabrsquos pitch and rollvibrations are selected as objective functions in this
study e expression of objective functions iswritten in equation (9) In order to nd the mini-mum values of the weighted RMS acceleration re-sponses the tness value J is greatly simplied tocalculate objective functions as follows [20 27]
J 1
sum αla2wl (8)
where subscript l refers to the vertical driverrsquos seat(zs) cabrsquos pitch (ϕc) or cabrsquos roll (θc) vibrations andαl is the scalar that weighted or percent of theweighted RMS values in le individuals with the higher tness value Jwhichis obtained via the subsystem model show that theobtained control rules in ldquo(iii) e FISrsquos rulesrdquo arebetter erefore the resultant individuals areupdated before the evolution process ends and theoptimal individuals can be obtained
(iii) Genetic operations after establishing the initialpopulation and selecting the parents Genetic oper-ations (including crossover and mutation) are thenperformed Herein crossover probability of 095 andmutation probability of 005 have been used in 200
Subsystem ofvibratory roller
SHM withRM damper
Fuzzy
FIS
GA(J)Off-road terrain
EECfd
u(Desired)
awzsawϕcawθc
PID control
(Kpprime Ki
prime Kdprime)
(a)
Kprime
p
Kprime
i
Kprime
d
Control rules(Mamdani)
E
EC
(b)
Figure 5 Structure of the vehicle model with SHM (a) Optimal fuzzy-PID control model (b) FLC control
Yes
No
Initialize population
Select parents
Update FIS and simulatethe Simulink system
Evolutionalnumber of times
End
Initialize parents and establish FIS
Start
Crossover
Mutation
Gen
etic
ope
ratio
ns
Selection
Evaluate the fitnessvalues of individuals
Output the control rulecode and fitness curve
Acceptance function
Figure 6 e ow chart of the GA program for SHM
Shock and Vibration 7
generations erefore the arithmetic crossover isperformed on 95 of the selected parents wherebytwo children are created from the weighted sum oftwo parents and children of the remaining 5 ofselected parents are exact copies of the parentsCrossover operation is performed until the pop-ulation number is doubled en each individualundergoes the mutation operation which is theprocess of randomly changing the values of genes in achromosomewith a probability of 005emutationcan create new genetic material into an existingindividual and add diversity to the genetic charac-teristics of the population Finally through the fitnessvalue J only the optimal individuals are selected atthe end of each generation to exist as the populationof the next generation For the termination criterionthe limitary generation is used then the resultantpopulation is evaluated to determine convergence
323 Optimal Result of the Control Rules In order to seekthe optimal control rules for the FPC we assume that thevibratory roller travels on the deformable terrain at a constantspeed v0 167mmiddotsminus1 and off-road terrain excitation input q(t)of the subsystem model is chosen as in Figure 3(a) with thesimulation time of 10 se scalar that weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibrations areαz 0486 αϕ 0449 and αθ 0065 respectively which aredecided based on the percent of the weighted RMS value of thevertical driverrsquos seat (486) cabrsquos pitch (449) and cabrsquos rollvibrations (65) with the weighted RMS values of the PHM inTable 1 e maximum generation is 200
e result in Figure 7 shows that the maximum fitnessvalue J is obtained from the evolutionary generation of 133to the end erefore the optimal individuals can be ob-tained at the generation of 133 By recording the optimalcontrol rules in FIS are listed in Table 2 e optimal controlrules are then used for the optimal FPC to simulate andanalyze the low-frequency performance of semi-active cabrsquoshydraulic mounts
4 Results and Discussion
41 Evaluation Criteria e performance of the vehiclesuspension system is evaluated by three main indices in thetime domain including the ride comfort working space androad holding characteristics
Among these three indices the ride comfort perfor-mance evaluated via the weighted RMS acceleration re-sponse is considered to be the most important index [1] Inaddition in the international standard ISO 2631-1 [12] thePSD acceleration response is also applied to estimate theeffect of vibration on the endurance limit of the human bodyin the frequency domain It was suggested that a low-frequency range of 4ndash10Hz for the vertical and of 05ndash2Hz for the rotational vibrations seriously affected thedriverrsquos health and safety In this study the performance ofSHM also is evaluated through both the PSD and theweighted RMS acceleration responses of the vertical driverrsquos
seat cabrsquos pitch and roll vibrations in the frequency andtime domains us the smaller PSD and weighted RMSvalues mean to be the better ability of the correspondingisolation mounts e expression of RMS was given by
awl
1T
1113946T
0euroxl(t)1113858 1113859
2dt
1113971
(9)
where euroxl(t) is the acceleration response in the l as a functionof time and T 50 s is the time of simulation
42 Control Performance When the Vehicle Travels on theDeformableTerrain In this study the vehicle is assumed to betraveling on a terrain type of Grenville loam given by Wong[28] at a constant speed v0 167mmiddotsminus1 e Grenville loamrsquosparameters including n 101 kc 006times103Nmiddotmminus(n+1)kφ 5880times103Nmiddotmminus(n+2) c 31times 103 Pa φ 298deg and itsoff-road terrain irregularity as in Figures 3(a) are the randomexcitation inputs of the simulatingmodel Simulations are thencarried out to analyze the low-frequency performance of SHMbased on the design parameters of a single drum vibratoryroller [1]
A good cabrsquos isolation system should be able to minimizeits deflection and acceleration to enhance the driverrsquos ridecomfort In addition the driverrsquos mental and physical healthis affected not only by the acceleration responses in the timeregion but also by the PSD acceleration responses in the low-frequency region [11]erefore the maximum PSD and theweighted RMS values of the vertical driverrsquos seat cab pitchand roll vibrations are respectively given to compare thelow-frequency performance of SHM
e simulation results of the PSD acceleration responsesof the vertical driverrsquos seat cabrsquos pitch and roll vibrations areplotted in Figures 8(a)ndash8(c) respectively In Figure 8 theresonance frequencies of PSD acceleration responses of thevertical driverrsquos seat cabrsquos pitch and roll vibrations withSHM without optimization and with optimization have notbeen changed in comparison with PHM is can be due tothe fact that stiffness coefficients of the cabrsquos isolation systemare unchanged and its damping control forces have almostno effect on the resonance frequencies However themaximum resonance peaks of the PSD acceleration re-sponses are significantly transformed by the SHM
e maximum resonance peaks of the PSD accelerationresponses of the vertical driverrsquos seat cabrsquos pitch and rollvibrations of SHM without optimization are smaller thanPHM Meanwhile the maximum resonance peaks of the PSDacceleration responses of SHM with optimization are thesmallest Especially in low-frequency below 4Hz the maxi-mum PSD values of the vertical driverrsquos seat cabrsquos pitch androll vibrations of SHM with optimization are greatly reducedby 3297 2908 and 6440 in comparison with PHMrespectively is is due to the main impact of the semi-activedamping force of hydraulic mount fd ch| _z| _z + u ere-fore the health of the driver can be clearly improved by SHMusing the optimal fuzzy-PID controller
e simulation results of the acceleration responses arealso shown in Figures 9(a)ndash9(c) In Figure 9 we can see that
8 Shock and Vibration
the acceleration responses of SHM with optimization arelower than both PHM and SHM without optimizationBesides the weighted RMS acceleration responses in Table 1also show that the weighted RMS values of the verticaldriverrsquos seat cabrsquos pitch and roll vibrations of SHM withoptimization are strongly reduced by 3499 4256 and4172 in comparison with PHM respectively e aboveanalysis results indicate that when the vehicle travels on thedeformable terrain the driverrsquos ride comfort can be clearlyimproved by SHM with optimization in both the time andthe low-frequency region erefore the SHM with opti-mization could provide the best ride comfort performancefor the off-road vibratory roller in the condition of thevehicle traveling
43 Control Performance When the Vehicle Moves andCompacts on the Elastoplastic Soil Ground In the workingcondition of the vibratory roller the effect of the elastoplasticsoil grounds on the performance of the compaction processwas studied under the excitation frequencies of the drum in arange of 01ndash70Hz [2ndash4 9] the research results showed thatcomprehensive drumsoil contact and loss of contact data
had appeared over a range of 15ndash40Hz [4] especially at theexcitation frequencies of 285Hz and 33Hz of the drumwhich yielded the maximum compaction forces due toldquodouble-jumprdquo of the drum [2 9] Based on the designparameters of a single drum vibratory roller [1] the exci-tation frequency of the vibratory drum in the workingcondition was also given at 28 and 35Hz therefore theexcitation frequencies of the vibratory drum at 28 and 35Hzwith the parameters of the vehicle [1] are used for simulationBesides in compression process of the drum the elastoplasticsoil properties are changed during the interaction between therigid drum and soil ground e elastoplastic soil propertiesare represented via three different values of the plasticityparameter ε including low-density soil ε 034 medium-density soil ε 072 and high-density soil ε 087 [9]However the elastoplastic property of low-density soil(ε 034) is similar to the property of a soft soil deformationwhich is simulated in the condition of the vehicle travelingerefore in order to evaluate the low-frequency perfor-mance of SHM in the condition of the vehicle working thevehicle is moved and compacted at very slow speed 083mmiddotsminus1under a lowhigh excitation frequency 2835Hz of the vi-bratory drum on a high elastoplastic soil ground e
50 100 150 2001
15
2
25
3X 133Y 2579
Evolutionary generations
J
Figure 7 e curve of fitness value
Table 1 e weighted RMS acceleration responses on a deformable terrain
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 1063 0875 0691 3499awϕc (radmiddotsminus2) 0982 0810 0564 4256awθc (radmiddotsminus2) 0139 0100 0081 4172
Table 2 Result of the optimal control rules
ECE
Kpprime Kiprime Kdprime
NB NS ZO PS PB NB NS ZO PS PB NB NS ZO PS PB
NB M MB B MS S S S M MB S S M B MB BNS MB M MS M MS S B MB MS M MS S M M SZO M S S S M MS MS S M MB M B S S MSPS MS M MS M B MS S M MB S MB MS S MS MSPB S MS M MB MB M M MS S S MS B S S M
Shock and Vibration 9
PHMSHM without optimizationSHM with optimization
05 1 2 4 8 16 32 640
02
04
06
08
Frequency (Hz)
Vert
ical
acce
lera
tion
PSD
(m2 middotsndash3
)X 209Y 0558
X 209Y 0374
ndash3297
(a)
PHMSHM without optimizationSHM with optimization
0
02
04
06
X 209Y 0361
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 209Y 0256
ndash2908
05 1 2 4 8 16 32 64Frequency (Hz)
(b)
PHMSHM without optimizationSHM with optimization
0
01
X 259Y 0059
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3)
X 259Y 0021
ndash6440
05 1 2 4 8 16 32 64Frequency (Hz)
(c)
Figure 8 Results of the PSD acceleration responses on the deformable terrain (a) Vertical driverrsquos seat (b) Cabrsquos pitch angle (c) Cabrsquos rollangle
PHMSHM without optimizationSHM with optimization
45 46 47 48 49 50ndash4
ndash2
0
2
4
Time (s)
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
(a)
PHMSHM without optimizationSHM with optimization
ndash4
ndash2
0
2
4
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
45 46 47 48 49 50Time (s)
(b)
Figure 9 Continued
10 Shock and Vibration
PHMSHM without optimizationSHM with optimization
ndash03
ndash02
ndash01
0
01
02
03
Roll
acce
lera
tion
(rad
middotsndash2)
45 46 47 48 49 50Time (s)
(c)
Figure 9 Results of the acceleration responses on the deformable terrain (a) Vertical driverrsquos seat (b) Cabrsquos pitch angle (c) Cabrsquos roll angle
05 1 2 4 8 16 32 640
01
02
03
04
X 569Y 0074
Frequency (Hz)
Vert
ical
acce
lera
tion
PSD
(m2 middotsndash3
)
X 2818Y 0014
X 209Y 0376 ndash2446
PHMSHM without optimizationSHM with optimization
X 209Y 0284
(a)
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
X 2818Y 0033
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 569Y 0045
X 209Y 0197
X 209Y 0135
ndash3147
PHMSHM without optimizationSHM with optimization
(b)
05 1 2 4 8 16 32 64Frequency (Hz)
0
001
002
003
004
X 2818Y 0008
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3) X 249
Y 0032
X 269Y 0013 X 569
Y 0011
ndash5937
PHMSHM without optimizationSHM with optimization
(c)
Figure 10 Results of the PSD acceleration responses under a low excitation frequency 28Hz of the drum (a) Vertical driverrsquos seat (b)Cabrsquos pitch angle (c) Cabrsquos roll angle
Shock and Vibration 11
parameters of the high elastoplastic soil ground includesε 087 ksp 283times106Nmiddotmminus1 kse 423times106Nmiddotmminus1 andcse 371times 103Nsmiddotmminus1
e comparison results of the PSD acceleration responsesof the vertical driverrsquos seat cabrsquos pitch and roll vibrations withthe cabrsquos isolation systems at a lowhigh excitation frequency2835Hz of the vibratory drum are seen in Figures 10 and 11Similarly in the condition of the vehicle traveling the res-onance frequencies of PSD acceleration responses of thevertical driverrsquos seat cabrsquos pitch and roll vibrations of SHMwithout optimization and SHM with optimization are alsounchanged in comparison with PHM e simulation resultsalso show that the resonance frequencies of SHM withoutoptimization and SHMwith optimization also occur at 28183518Hz comparable with PHM in all three directions iscan be due to the effect of the resonance at a lowhigh ex-citation frequency 2835Hz of the vibratory drum In ad-dition the resonance frequency of the acceleration PSDresponses of all cabrsquos isolation systems clearly appears at569Hz in both graphs of Figures 10 and 11 whereas thisresonance frequency does not occur in the graph of Figure 8
is particularity may be due to the effect of the soil stiffnesswith the high-density soil ground
Besides at a low-frequency range below 4Hz themaximum resonance peaks of the PSD acceleration re-sponses of the vertical driverrsquos seat cabrsquos pitch and rollvibrations of SHMwith optimization are strongly reduced incomparison with PHM by 2446 3147 and 5937 at alow excitation frequency 28Hz of the drum and by 17763352 and 5385 at a high excitation frequency 35Hz ofthe drum respectively is is also due to the main impact ofthe semi-active damping force of hydraulic mountfd ch| _z| _z + u Contrarily at a frequency range upper 4Hzthe PSD acceleration responses of the vertical driverrsquos seatcabrsquos pitch and roll vibrations of SHMwithout optimizationand SHM with optimization are slightly increased incomparison with PHM especially at the resonance fre-quency of 569Hz However the PSD acceleration values arevery small erefore the driverrsquos health can be clearlyimproved by using SHM with optimization in the low-frequency region when the vehicle moves and compactson an elastoplastic soil ground
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
03
04Ve
rtic
al ac
cele
ratio
n PS
D (m
2 middotsndash3)
X 3518Y 00018
X 569Y 0031
X 209Y 0321
X 209Y 0264
ndash1776
PHMSHM without optimizationSHM with optimization
(a)
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 3518Y 0015
X 569Y 0019
X 209Y 0182
X 209Y 0121
ndash3352
PHMSHM without optimizationSHM with optimization
(b)
05 1 2 4 8 16 32 64Frequency (Hz)
0
001
002
003
004
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3)
X 569Y 0004
X 249Y 0026
X 3518Y 00035
X 269Y 0012
ndash5385
PHMSHM without optimizationSHM with optimization
(c)
Figure 11 Results of the PSD acceleration responses under a high excitation frequency 35Hz of the drum (a) Vertical driverrsquos seat (b)Cabrsquos pitch angle (c) Cabrsquos roll angle
12 Shock and Vibration
45 46 47 48 49 50ndash2
ndash1
0
1
2
Time (s)
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(a)
45 46 47 48 49 50Time (s)
ndash1
ndash05
0
05
1
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(b)
45 46 47 48 49 50Time (s)
ndash01
ndash005
0
005
01
Roll
acce
lera
tion
(rad
middotsndash2)
PHMSHM without optimizationSHM with optimization
(c)
Figure 12 Results of the acceleration responses under a low excitation frequency 28Hz of the drum (a) Vertical driverrsquos seat (b) Cabrsquospitch angle (c) Cabrsquos roll angle
45 46 47 48 49 50Time (s)
ndash2
ndash1
0
1
2
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(a)
45 46 47 48 49 50Time (s)
ndash1
ndash05
0
05
1
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(b)
Figure 13 Continued
Shock and Vibration 13
e simulation results in Figures 12 and 13 also showthat the acceleration responses of the vertical driverrsquos seatcabrsquos pitch and roll vibrations of SHM with optimizationare lower than both PHM and SHM without optimizationBesides the values of the weighted RMS accelerationresponses are also listed in Tables 3 and 4 e weightedRMS values of the vertical driverrsquos seat cabrsquos pitch androll vibrations of SHM with optimization are greatly re-duced in comparison with SHM by 3516 4829 and3765 under a low excitation frequency 28 Hz of thedrum and by 2480 4315 and 3606 under a highexcitation frequency 35 Hz of the drum respectivelyConsequently the above analysis results also indicate thatthe driverrsquos ride comfort and health are strongly improvedby SHM with optimization when the vehicle moves andcompacts on the high elastoplastic soil ground under boththe lowhigh excitation frequency 2835 Hz of the vi-bratory drum
5 Conclusions
Modeling and low-frequency performance analysis of semi-active cabrsquos hydraulic mounts of the off-road vibratory rollerare addressed in this work e comparison between thesimulation and test results of passive cabrsquos isolation mounts
is also carried out e low-frequency performance of SHMusing the optimal fuzzy-PID controller is then evaluatedthrough the PSD acceleration and weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibrations inboth the frequency and time domains e results aresummarized as follows
(1) In the condition of the vehicle traveling the weightedRMS acceleration responses and the PSD accelera-tion responses of the vertical driverrsquos seat cabrsquos pitchand roll vibrations of SHM with optimization arelower than both PHM and SHM without optimi-zation Particularly the weighted RMS values ofSHM with optimization are strongly reduced incomparison with PHM by 3499 4256 and4172 respectively
(2) In condition of the vehicle working both PSD ac-celeration responses and the weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibra-tions of SHM using the optimal fuzzy-PID controllerare clearly smaller comparable with both PHM andSHM without optimization under both lowhighexcitation frequency 2835Hz of the drum on thehigh elastoplastic soil ground Especially the maxi-mum PSD values of the vertical driverrsquos seat cabrsquos
45 46 47 48 49 50Time (s)
ndash01
ndash005
0
005
01
Roll
acce
lera
tion
(rad
middotsndash2)
PHMSHM without optimizationSHM with optimization
(c)
Figure 13 Results of the acceleration responses under a high excitation frequency 35Hz of the drum (a) Vertical driverrsquos seat (b) Cabrsquospitch angle (c) Cabrsquos roll angle
Table 3 e weighted RMS values under a low excitation frequency 28Hz of the drum
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 0657 0501 0426 3516awϕc (radmiddotsminus2) 0323 0184 0167 4829awθc (radmiddotsminus2) 0085 0056 0053 3765
Table 4 e weighted RMS values under a high excitation frequency 35Hz of the drum
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 0512 0453 0385 2480awϕc (radmiddotsminus2) 0241 0162 0137 4315awθc (radmiddotsminus2) 0061 0040 0039 3606
14 Shock and Vibration
pitch and roll vibrations of SHM with optimizationare strongly reduced by 2446 3147 and 5937in comparison with PHM when the vehicle compactsat a low excitation frequency 28Hz of the drum
(3) e above analysis results indicate that the low-frequency and high-stiffness characteristics of SHMusing the optimal fuzzy-PID controller have the besteffect on isolating low-frequency vibration trans-mitted and controlling the cab shaking under variousoperating conditions of the off-road vibratory roller
Data Availability
e data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] V Liem J Zhang V Quynh and R Jiao ldquoVibration analysisand modeling of an off-road vibratory roller equipped withthree different cabrsquos isolation mountsrdquo Shock and Vibrationvol 2018 Article ID 8527574 17 pages 2018
[2] D Adam and F Kopf ldquoeoretical analysis of dynamicallyloaded soilsrdquo in Proceedings of the European WorkshopCompaction of Soils and Granular Materials pp 207ndash217Paris France 2000
[3] J Li Z Zhang H Xu and Z Feng ldquoDynamic characteristicsof the vibratory roller test-bed vibration isolation systemsimulation and experimentrdquo Journal of Terramechanicsvol 56 pp 139ndash156 2014
[4] J Paul and A Michael ldquoCapturing nonlinear vibratory rollercompactor behavior through lumped parameter modelingrdquoJournal of Engineering Mechanics vol 134 no 8 pp 684ndash6932008
[5] X Zhang Modelling simulation and optimization of ridecomfort for off road articulated dump trucks PhD thesisSoutheast University Nanjing China 2010
[6] A Pakowski and D Cao ldquoEffect of soil deformability on off-road vehicle ride dynamicsrdquo SAE International Journal ofCommercial Vehicles vol 6 no 2 pp 362ndash371 2013
[7] R A Irani R J Bauer and A Warkentin ldquoDynamic wheel-soil model for lightweight mobile robots with smooth wheelsrdquoJournal of Intelligent amp Robotic Systems vol 71 no 2pp 179ndash193 2013
[8] S Park A A Popov and D J Cole ldquoInfluence of soil de-formation on off-road heavy vehicle suspension vibrationrdquoJournal of Terramechanics vol 41 no 1 pp 41ndash68 2004
[9] A Kordestani S Rakheja P Marcotte A Pazooki andD Juras ldquoAnalysis of ride vibration environment of soilcompactorsrdquo SAE International Journal of Commercial Ve-hicles vol 3 no 1 pp 259ndash272 2010
[10] V Quynh Vibration study and control for cab of vibratoryroller PhD thesis Southeast University Nanjing China2013
[11] M Griffin Handbook of Human Vibration Academic PressLondon UK 1990
[12] International Organization for Standardization ldquoMechanicalvibration and shock-evaluation of human exposure to wholebody vibration-part 2 general requirementsrdquo Tech Rep ISO2631-11997 ISO Geneva Switzerland 1997
[13] S Yildirim ldquoVibration control of suspension systems using aproposed neural networkrdquo Journal of Sound and Vibrationvol 277 no 4-5 pp 1059ndash1069 2004
[14] N Ebrahimi and A Gharaveisi ldquoOptimal fuzzy supervisorcontroller for an active suspension systemrdquo InternationalJournal of Soft Computing amp Engineering vol 2 no 4pp 36ndash39 2012
[15] Z Xie P Wong J Zhao T Xu and I Wong ldquoA noise-insensitive semi-active air suspension for heavy-duty vehicleswith an integrated fuzzy-wheelbase preview controlrdquo Math-ematical Problem in Engineering vol 2013 Article ID 12195312 pages 2013
[16] B Kasemi A G A Muthalif M M Rashid and S FathimaldquoFuzzy-PID controller for semi-active vibration control usingmagnetorheological fluid damperrdquo Procedia Engineeringvol 41 pp 1221ndash1227 2012
[17] T Nguyen A novel semi-active magnetorheological mount forvibration isolation PhD thesis e University of ToledoToledo OH USA 2009
[18] A Muthalif B Kasemi D Nordin and M Rashid ldquoSemi-active vibration control using experimental model of Mag-netorheological damper with adaptive fuzzy-PID controllerrdquoSmart Structures and Systems vol 20 no 1 pp 85ndash97 2017
[19] S D Nguyen Q H Nguyen and S-B Choi ldquoA hybridclustering based fuzzy structure for vibration control-part 2an application to semi-active vehicle seat-suspension systemrdquoMechanical Systems and Signal Processing vol 56-57pp 288ndash301 2015
[20] W Wang Y Song Y Xue H Jin J Hou and M Zhao ldquoAnoptimal vibration control strategy for a vehiclersquos active sus-pension based on improved cultural algorithmrdquo Applied SoftComputing vol 28 pp 167ndash174 2015
[21] Y Chen Z Wang J Qiu and Z Huang ldquoHybrid fuzzyskyhook surface control using multi-objective microgeneticalgorithm for semi-active vehicle suspension system ridecomfort stability analysisrdquo Journal of Dynamic SystemsMeasurement amp Control vol 134 no 4 pp 1ndash14 2012
[22] International Organization for Standardization ldquoReportingvehicle road surface irregularitiesrdquo Tech Rep ISOTC108SC2WG4 N57 ieme Medical Publishers Stuttgart Germany1982
[23] M Mitschke Dynamik der Kraftfahrzeuge Springer-VerlagBerlin Germany 1972
[24] M Rahmat ldquoApplication of selftuning fuzzy PID controlleron industrial hydraulic actuator using system identificationapproachrdquo International Journal on Smart Sensing amp In-telligent Systems vol 2 no 2 pp 246ndash261 2009
[25] E H Mamdani and S Assilian ldquoAn experiment in linguisticsynthesis with a fuzzy logic controllerrdquo International Journalof Man-Machine Studies vol 7 no 1 pp 1ndash13 1975
[26] Z Nariman M Salehpour A Jamali and E HanghgooldquoPareto optimization of a five-degree of freedom vehicle vi-bration model using a MUGArdquo Engineering Applications ofArtificial Intelligence vol 23 no 4 pp 543ndash551 2010
[27] H John G Michael and D Gregory ldquoMulti-objective controloptimization for semi-active vehicle suspensionsrdquo Journal ofSound and Vibration vol 330 pp 5502ndash5516 2011
[28] J Y Wong ldquoData processing methodology in the charac-terization of the mechanical properties of terrainrdquo Journal ofTerramechanics vol 17 no 1 pp 13ndash41 1980
Shock and Vibration 15
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

magnetorheological (MR) fluid with adjustable damping[16ndash18] e damping plate of the SHM is equipped with anelectromagnet coil and a flux guide When the coil current ischanging a magnetic field in the flux guide is also beingtransformed thus the viscosity of MR fluid in the annularorifice is simultaneously changing e result is that thevibration damping can be adjusted according to the differentroad surfaces MR fluid flows in the upper-lower chamberare also derived by the transfer of damping plate through theannular orifice and the orifices as seen in Figure 1(d) elumped parameter model of SHM is also represented by alinear stiffness kr and damping cr coefficients of the mainrubber and a semi-active damping force of hydraulic mountfd ch| _z| _z + u Herein u is an active damping force of MRfluid which is controlled by an optimal fuzzy-PID controlleras shown in Figure 2(b)
e corresponding dynamic force at mount i of the cabrsquosisolation mounts in the vertical direction is given by
Fci kri zci minus zrf i( 1113857 + cri _zci minus _zrf i( 1113857 + fdi
fdi
0 with PRM
chi _zci minus _zrf i1113868111386811138681113868
1113868111386811138681113868 _zci minus _zrf i( 1113857 with PHM
chi _zci minus _zrf i1113868111386811138681113868
1113868111386811138681113868 _zci minus _zrf i( 1113857 + ui with SHM
⎧⎪⎪⎪⎨
⎪⎪⎪⎩
zci zc +(minus1)αlα+1ϕc +(minus1)
ibδθc
zrf i zrf minus lυϕrf +(minus1)ibδθrf
_zci _zc +(minus1)αlα+1
_ϕc +(minus1)ibδ
_θc
_zrf i _zrf minus lυ_ϕrf +(minus1)
ibδ
_θrf
(2)
where zci zrfi and _zci _zrf i are the displacements and thevelocities of the cab frame and the rear frame at mount i ofthe isolation mounts When i 1-2 then α 1 υ 5 andδ i+ 1 when i 3-4 then α 2 υ 4 and δ iminus 1
23 Random Excitation of the Off-Road Terrain SurfaceIn actual operating conditions the excitation forces of thevibratory roller are strongly affected by the rough terrainsurfaces apart from wheels-deformable terrain interactionse terrain behaviour under wheel-soil contact is nonlinearus the off-road vibratory rollers must be studied in thefrequency domain apart from the traditional time domain toanalyze the influence of excitation on the ride response Off-road terrain surface in the frequency domain is calculated viathe PSD value [6]e spatial PSD of the road surface profileS(Ω) is described as a function of the spatial frequency Ω(cyclemiddotmminus1) e spectral density of off-road terrain is thuswritten in accordance with ISO proposal [22] over thedifferent spatial frequency ranges by
S(Ω) S Ω0( 1113857ΩΩ0
1113888 1113889
minusw0
(3)
where w0 3 forΩleΩ0 and w0 225 forΩgtΩ0 the valueS(Ω0) provides a measure for the random terrain with thereference spatial frequency Ω0 12π cyclemiddotmminus1
More specifically assuming the vehicle moves with aconstant speed v0 the off-road terrain irregularities in thetime domain can then be simulated by the series
q(t) 1113944N
i1si sin iΔωt + ϕi( 1113857 (4)
where N is the number of intervals and si 2S(iΔn)Δn
1113968is
the amplitude of each the excitation harmonic in which S isthe target spectral density Δn 2πL and L is the length ofthe road segment φi is a random phase uniformly distrib-uted between 0 and 2π and ΔωΔnv0 is the fundamentaltemporal frequency Mitschke [23] extended the spectraldensity ranges for the unpaved off-road classifications apartfrom the traditional asphalt road classifications includingthe classification ranges from good to very poor and thedesired terrain roughness can be yielded by choosing a valuein the spectral density ranges
In order to develop an off-road terrain roughness inputclosing to the actual terrain condition the simulation pa-rameters used for generating the time domain of a roughterrain surface as shown in Figure 3(a) are a type of pooroff-road classification with v0 167mmiddotsminus1 L 84mΔt 0005 s w0 214 and S(Ω0) 37825times10minus6m3middotcycleminus1Its spectral density obtained from the time domain is alsodepicted in Figure 3(b) e frequency region of the inputsignal is mainly below 10Hz
24 Experimental Model Results In order to validate theaccuracy of the mathematical model of the off-road vi-bratory roller experiments and simulations were carriedout with cabrsquos isolation systems when the vehicle movedand compacted at a speed v0 083mmiddotsminus1 on a poor elas-toplastic terrain surface at the excitation frequency 28Hzof the drum [1] e comparison results are shown inFigure 4 With PRM as plotted in Figures 4(a)ndash4(c)comparisons of simulation and experimental results of thePSD acceleration responses are show that the simulationresults almost agree with the tests as to the frequency of thevarious peaks in the responses and the trend In additionthe weighted RMS values of the vertical driverrsquos seat cabrsquospitch and roll vibrations of PRM as shown in Figure 4(d)are deviated small by 1020 1121 and 1267 incomparison with the measured values It implies that themathematical model of the vibratory roller is the accurateand feasible model
In addition simulation results with PHM showed thatboth PSD acceleration responses and the weighted RMSvalues of the vertical driverrsquos seat cabrsquos pitch and rollvibrations are greatly reduced and the PHM has almost noeffect on the resonance frequencies in comparison withPRM under the various operating conditions ereforethe model of the off-road vibratory roller using PHM notonly enhances the vehiclersquos ride comfort but also providesthe accurate and feasible model for low-frequency per-formance analysis of the semi-active cabrsquos hydraulicmounts (SHMs)
4 Shock and Vibration
0 10 20 30 40 50ndash004
ndash002
0
002
004
Time (s)
Rand
om te
rrai
n (m
)
Off-road terrain roughness
(a)
10ndash1 100 10110ndash8
10ndash6
10ndash4
10ndash2
100
Frequency (Hz)
Off-
road
PSD
(m2 middotH
zndash1)
Simulated terrain PSD
Poor target PSD
(b)
Figure 3 Generation of the o-road terrain roughness according to unpaved o-road classication (a) O-road terrain prole (b) Spectraldensities
05 1 2 4 8 16 32 6410ndash4
10ndash3
10ndash2
10ndash1
100
Frequency (Hz)
X 2818Y 0004
Vert
ical
acce
lera
tion
PSD
(m2 middotsndash3
)
Experiment with PRMSimulation with PRMSimulation with PHM
(a)
05 1 2 4 8 16 32 6410ndash4
10ndash3
10ndash2
10ndash1
100
Frequency (Hz)
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)X 2818Y 0037
Experiment with PRMSimulation with PRMSimulation with PHM
(b)
Experiment with PRMSimulation with PRMSimulation with PHM
05 1 2 4 8 16 32 6410ndash5
10ndash4
10ndash3
10ndash2
10ndash1
100
Frequency (Hz)
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3)
X 2818Y 0007
(c)
Experiment with PRMSimulation with PRMSimulation with PHM
03
0
06
09
12
Wei
ghte
d RM
S va
lues
ϕc θczs
0794mmiddotsndash2
0657mmiddotsndash20713mmiddotsndash2
0323radmiddotsndash20396radmiddotsndash2
0446radmiddotsndash2
0085radmiddotsndash2
0150radmiddotsndash2
0131radmiddotsndash2
Degrees of freedom
(d)
Figure 4e experimental and simulation results under an excitation frequency 28Hz of the drum [1] (a) PSD acceleration response of thevertical driverrsquos seat (b) PSD acceleration response of the cabrsquos pitch angle (c) PSD acceleration response of the cabrsquos roll angle (d)Weighted RMS values of the driverrsquos seat and the cab
Shock and Vibration 5
3 Design of the Optimal Fuzzy-PID Controller
31 Modeling of the Optimal Fuzzy-PID Control e PIDcontrol is one of the controllers with not only a simplestructure but also robust performance and it is generallyused in industrial process control However the perfor-mance of PID control depends on the appropriate selectionof the PIDrsquos parameters e well-known Ziegler-Nicholstechnique has been used to choose the PIDrsquos parametersHowever it is only efficient when the system works at thedesigned operating condition Contrariwise the fuzzy logiccontrol (FLC) does not depend on the designed operatingcondition it only depends on the appropriate selection of thefuzzy inference system (FIS) However the shortcomings ofFLC are low precision and stability In order to avoidshortcomings of both FLC and PID control fuzzy-PIDcontrol had been developed [18 20 24] In this study toenhance the control performance of fuzzy-PID control(FPC) the control rules in FIS optimized via the geneticalgorithm (GA) program are then developed and applied forthe FPCrsquos optimization
In the cabrsquos isolationmounts there are four SHMs whichshould be separately controlled thus four optimal fuzzy-PID controls should be designed However the designprocess of these controls is the same erefore a specific ofthe optimal FPC is designed to control the active dampingforce of MR fluid e model of the optimal FPC for SHM isdepicted in Figure 5(a)
In Figure 5(a) fuzzy-PID control includes two inputsand three outputs in which 2 inputs denoted by E and EC arethe vertical displacement error (E) and the vertical velocityerror (EC) of the cab frame and 3 outputs denoted byKpprime Kiprime andKdprime are the proportionality factors respectivelye proportional integral and derivative parameters in PIDcontrol are defined by Kp Ki and Kd which can be auto-matically tuned and depend on the parametersKpprime Kiprime andKdprime of the FLC and the actual control force ofMR fluid u(t) is decided by the PID control the control forcefd of SHM is then used for subsystem of the vehicle In orderto enhance the further performance of the FPC the GAprogram is used to optimize the control rules in FIS via thesubsystem of the vehicle and the objective functions
e force output of the PID control is given by
u(t) Kpe(t) + Ki 1113946t
0e(t)dt + Kd _e(t) (5)
where e(t) is the displacement error the cab framee initial values of proportionality factors in equation
(5) determined by the Ziegler-Nichols method via thesubsystem model are Kp(0) 1985 Ki(0) 18 and Kd(0)
12 In order to find the best values for Kp Ki and Kd weassume their variable ranges as [KpminKpmax] [KiminKimax]and [Kdmin Kdmax] respectively us based on the initialvalues the range of each parameter is chosen by Kp isin [1002500] Ki isin [1 100] and Kd isin [01 10]
e next is a design of the FLC e basic fuzzy controlconsists of the following major parts fuzzification interfaceFIS and defuzzification interface First the crisp values infuzzification are transformed into linguistic variables FIS is
then used by control rules in accordance with inferencerules and finally the linguistic variables are transformedback to crisp values through defuzzification for use by thephysical plant [25] erefore the FPC can be designed inthree steps below
(i) Choosing the fuzzy control input-output two inputvariables E and EC belong to [minus025 025] Besidesthree output variables Kpprime Kiprime andKdprime are calibratedover the interval [0 1] as follows [24]
Kpprime
Kp minusKpmin
Kpmax minusKpmin
Kiprime
Ki minusKimin
Kimax minusKimin
Kdprime
Kd minusKdmin
Kdmax minusKdmin
(6)
Hence the input values in equation (5) are re-spectively Kp 2400Kpprime + 100 Ki 99Kiprime + 1 andKd 99Kdprime + 01e linguistic variables of two inputs are defined bythe positive big (PB) positive small (PS) zero (ZO)negative small (NS) and negative big (NB) Besidesthe linguistic variables of three outputs are alsodefined as small (S) medium small (MS) medium(M) medium big (MB) and big (B) respectively
(ii) Membership function the shape of membershipfunctions of input-output variables is used by thetriangular function and its degree of membership isbetween 0 and 1 as shown in Figure 5(b)
(iii) e FISrsquos rules the initial control rules are given bythe designerrsquos knowledge and experience as follows
(1) If E is NB and EC is NB then Kpprime is MS Kiprime is Sand Kdprime is S
(2) If E is NB and EC is NS then Kpprime isM Kiprime is MSand Kdprime is S
(25) If E is PB and EC is PB then Kpprime is B Kiprime is MBand Kdprime is MB
where FIS is selected by the minimum function andthe centroid method of Mamdani and Assilian [25]and the above control rules are then optimized byGA program through the subsystem model
32 Optimization of the Control Rules Based on theGA Program
321 GA Program GA is an optimization method based onprinciples of natural selection It seeks the maximum or theminimum values of one or more objective functions usingcomputational techniques motivated by biological re-production erefore GA is defined as finding a vector ofdecisive variables that satisfies constraints to give acceptablevalues to all objective functions [26 27] and it can be writtenas follows
6 Shock and Vibration
Find the vector x [x1 x2 xn]T to optimize
F(x) f1(x) f2(x) fn(x)[ ]Tsubject togi(x)le 0 i 1 2 p
hj(x) 0 j 1 2 q
(7)
where F(x) is the vector of objective functions which mustbe either maximized or minimized and p and q are numbersof inequality constraints and equality constraints
GA is structured into the following steps encodingpopulation initialization tness evaluation parent selectiongenetic operations (crossover and mutate) and terminationcriterione ow chart of the GA program for SHM is builtin Figure 6
322 Application of GA Program to Optimize the ControlRules e goal main of GA is to seek the optimal controlrules in FIS to get the minimum values of the weighted RMSacceleration responses of the vertical driverrsquos seat cabrsquospitch and roll vibrations via the subsystem model inFigure 5(a) erefore GArsquos structure is built as follows
(i) Encoding mechanism and initial population in ldquo(iii)e FISrsquos rulesrdquo there are 25 control rules thatcontain a total of 75 elements e 75 elements arethen connected into a string of numbers as achromosome which is regarded as a vectorEncoding mechanism can shorten the chromosomelength of the individuals in population space toenhance the running speed and to reduce thesearching space of the algorithm program us thelinguistic variables of two inputs (E and EC) areencoded by the numbers as [NB NS ZO PS PB][0 1 2 3 4] [aj]1times5 and the linguistic variables ofthree outputs (Kpprime Kiprime andKdprime) are encoded by thenumbers as [S MS M MB B] [5 6 7 8 9] [bj]1times5 Besides the individuals in the initial pop-ulation are randomly generated For each gene thevalue of that gene is also selected as a randompositive integer in the range of 0le ajle 4 and5le bjle 9 and the size of the initial population is 100
(ii) Objective function and tness value the minimumvalues of the weighted RMS acceleration responses(awl) of the vertical driverrsquos seat cabrsquos pitch and rollvibrations are selected as objective functions in this
study e expression of objective functions iswritten in equation (9) In order to nd the mini-mum values of the weighted RMS acceleration re-sponses the tness value J is greatly simplied tocalculate objective functions as follows [20 27]
J 1
sum αla2wl (8)
where subscript l refers to the vertical driverrsquos seat(zs) cabrsquos pitch (ϕc) or cabrsquos roll (θc) vibrations andαl is the scalar that weighted or percent of theweighted RMS values in le individuals with the higher tness value Jwhichis obtained via the subsystem model show that theobtained control rules in ldquo(iii) e FISrsquos rulesrdquo arebetter erefore the resultant individuals areupdated before the evolution process ends and theoptimal individuals can be obtained
(iii) Genetic operations after establishing the initialpopulation and selecting the parents Genetic oper-ations (including crossover and mutation) are thenperformed Herein crossover probability of 095 andmutation probability of 005 have been used in 200
Subsystem ofvibratory roller
SHM withRM damper
Fuzzy
FIS
GA(J)Off-road terrain
EECfd
u(Desired)
awzsawϕcawθc
PID control
(Kpprime Ki
prime Kdprime)
(a)
Kprime
p
Kprime
i
Kprime
d
Control rules(Mamdani)
E
EC
(b)
Figure 5 Structure of the vehicle model with SHM (a) Optimal fuzzy-PID control model (b) FLC control
Yes
No
Initialize population
Select parents
Update FIS and simulatethe Simulink system
Evolutionalnumber of times
End
Initialize parents and establish FIS
Start
Crossover
Mutation
Gen
etic
ope
ratio
ns
Selection
Evaluate the fitnessvalues of individuals
Output the control rulecode and fitness curve
Acceptance function
Figure 6 e ow chart of the GA program for SHM
Shock and Vibration 7
generations erefore the arithmetic crossover isperformed on 95 of the selected parents wherebytwo children are created from the weighted sum oftwo parents and children of the remaining 5 ofselected parents are exact copies of the parentsCrossover operation is performed until the pop-ulation number is doubled en each individualundergoes the mutation operation which is theprocess of randomly changing the values of genes in achromosomewith a probability of 005emutationcan create new genetic material into an existingindividual and add diversity to the genetic charac-teristics of the population Finally through the fitnessvalue J only the optimal individuals are selected atthe end of each generation to exist as the populationof the next generation For the termination criterionthe limitary generation is used then the resultantpopulation is evaluated to determine convergence
323 Optimal Result of the Control Rules In order to seekthe optimal control rules for the FPC we assume that thevibratory roller travels on the deformable terrain at a constantspeed v0 167mmiddotsminus1 and off-road terrain excitation input q(t)of the subsystem model is chosen as in Figure 3(a) with thesimulation time of 10 se scalar that weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibrations areαz 0486 αϕ 0449 and αθ 0065 respectively which aredecided based on the percent of the weighted RMS value of thevertical driverrsquos seat (486) cabrsquos pitch (449) and cabrsquos rollvibrations (65) with the weighted RMS values of the PHM inTable 1 e maximum generation is 200
e result in Figure 7 shows that the maximum fitnessvalue J is obtained from the evolutionary generation of 133to the end erefore the optimal individuals can be ob-tained at the generation of 133 By recording the optimalcontrol rules in FIS are listed in Table 2 e optimal controlrules are then used for the optimal FPC to simulate andanalyze the low-frequency performance of semi-active cabrsquoshydraulic mounts
4 Results and Discussion
41 Evaluation Criteria e performance of the vehiclesuspension system is evaluated by three main indices in thetime domain including the ride comfort working space androad holding characteristics
Among these three indices the ride comfort perfor-mance evaluated via the weighted RMS acceleration re-sponse is considered to be the most important index [1] Inaddition in the international standard ISO 2631-1 [12] thePSD acceleration response is also applied to estimate theeffect of vibration on the endurance limit of the human bodyin the frequency domain It was suggested that a low-frequency range of 4ndash10Hz for the vertical and of 05ndash2Hz for the rotational vibrations seriously affected thedriverrsquos health and safety In this study the performance ofSHM also is evaluated through both the PSD and theweighted RMS acceleration responses of the vertical driverrsquos
seat cabrsquos pitch and roll vibrations in the frequency andtime domains us the smaller PSD and weighted RMSvalues mean to be the better ability of the correspondingisolation mounts e expression of RMS was given by
awl
1T
1113946T
0euroxl(t)1113858 1113859
2dt
1113971
(9)
where euroxl(t) is the acceleration response in the l as a functionof time and T 50 s is the time of simulation
42 Control Performance When the Vehicle Travels on theDeformableTerrain In this study the vehicle is assumed to betraveling on a terrain type of Grenville loam given by Wong[28] at a constant speed v0 167mmiddotsminus1 e Grenville loamrsquosparameters including n 101 kc 006times103Nmiddotmminus(n+1)kφ 5880times103Nmiddotmminus(n+2) c 31times 103 Pa φ 298deg and itsoff-road terrain irregularity as in Figures 3(a) are the randomexcitation inputs of the simulatingmodel Simulations are thencarried out to analyze the low-frequency performance of SHMbased on the design parameters of a single drum vibratoryroller [1]
A good cabrsquos isolation system should be able to minimizeits deflection and acceleration to enhance the driverrsquos ridecomfort In addition the driverrsquos mental and physical healthis affected not only by the acceleration responses in the timeregion but also by the PSD acceleration responses in the low-frequency region [11]erefore the maximum PSD and theweighted RMS values of the vertical driverrsquos seat cab pitchand roll vibrations are respectively given to compare thelow-frequency performance of SHM
e simulation results of the PSD acceleration responsesof the vertical driverrsquos seat cabrsquos pitch and roll vibrations areplotted in Figures 8(a)ndash8(c) respectively In Figure 8 theresonance frequencies of PSD acceleration responses of thevertical driverrsquos seat cabrsquos pitch and roll vibrations withSHM without optimization and with optimization have notbeen changed in comparison with PHM is can be due tothe fact that stiffness coefficients of the cabrsquos isolation systemare unchanged and its damping control forces have almostno effect on the resonance frequencies However themaximum resonance peaks of the PSD acceleration re-sponses are significantly transformed by the SHM
e maximum resonance peaks of the PSD accelerationresponses of the vertical driverrsquos seat cabrsquos pitch and rollvibrations of SHM without optimization are smaller thanPHM Meanwhile the maximum resonance peaks of the PSDacceleration responses of SHM with optimization are thesmallest Especially in low-frequency below 4Hz the maxi-mum PSD values of the vertical driverrsquos seat cabrsquos pitch androll vibrations of SHM with optimization are greatly reducedby 3297 2908 and 6440 in comparison with PHMrespectively is is due to the main impact of the semi-activedamping force of hydraulic mount fd ch| _z| _z + u ere-fore the health of the driver can be clearly improved by SHMusing the optimal fuzzy-PID controller
e simulation results of the acceleration responses arealso shown in Figures 9(a)ndash9(c) In Figure 9 we can see that
8 Shock and Vibration
the acceleration responses of SHM with optimization arelower than both PHM and SHM without optimizationBesides the weighted RMS acceleration responses in Table 1also show that the weighted RMS values of the verticaldriverrsquos seat cabrsquos pitch and roll vibrations of SHM withoptimization are strongly reduced by 3499 4256 and4172 in comparison with PHM respectively e aboveanalysis results indicate that when the vehicle travels on thedeformable terrain the driverrsquos ride comfort can be clearlyimproved by SHM with optimization in both the time andthe low-frequency region erefore the SHM with opti-mization could provide the best ride comfort performancefor the off-road vibratory roller in the condition of thevehicle traveling
43 Control Performance When the Vehicle Moves andCompacts on the Elastoplastic Soil Ground In the workingcondition of the vibratory roller the effect of the elastoplasticsoil grounds on the performance of the compaction processwas studied under the excitation frequencies of the drum in arange of 01ndash70Hz [2ndash4 9] the research results showed thatcomprehensive drumsoil contact and loss of contact data
had appeared over a range of 15ndash40Hz [4] especially at theexcitation frequencies of 285Hz and 33Hz of the drumwhich yielded the maximum compaction forces due toldquodouble-jumprdquo of the drum [2 9] Based on the designparameters of a single drum vibratory roller [1] the exci-tation frequency of the vibratory drum in the workingcondition was also given at 28 and 35Hz therefore theexcitation frequencies of the vibratory drum at 28 and 35Hzwith the parameters of the vehicle [1] are used for simulationBesides in compression process of the drum the elastoplasticsoil properties are changed during the interaction between therigid drum and soil ground e elastoplastic soil propertiesare represented via three different values of the plasticityparameter ε including low-density soil ε 034 medium-density soil ε 072 and high-density soil ε 087 [9]However the elastoplastic property of low-density soil(ε 034) is similar to the property of a soft soil deformationwhich is simulated in the condition of the vehicle travelingerefore in order to evaluate the low-frequency perfor-mance of SHM in the condition of the vehicle working thevehicle is moved and compacted at very slow speed 083mmiddotsminus1under a lowhigh excitation frequency 2835Hz of the vi-bratory drum on a high elastoplastic soil ground e
50 100 150 2001
15
2
25
3X 133Y 2579
Evolutionary generations
J
Figure 7 e curve of fitness value
Table 1 e weighted RMS acceleration responses on a deformable terrain
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 1063 0875 0691 3499awϕc (radmiddotsminus2) 0982 0810 0564 4256awθc (radmiddotsminus2) 0139 0100 0081 4172
Table 2 Result of the optimal control rules
ECE
Kpprime Kiprime Kdprime
NB NS ZO PS PB NB NS ZO PS PB NB NS ZO PS PB
NB M MB B MS S S S M MB S S M B MB BNS MB M MS M MS S B MB MS M MS S M M SZO M S S S M MS MS S M MB M B S S MSPS MS M MS M B MS S M MB S MB MS S MS MSPB S MS M MB MB M M MS S S MS B S S M
Shock and Vibration 9
PHMSHM without optimizationSHM with optimization
05 1 2 4 8 16 32 640
02
04
06
08
Frequency (Hz)
Vert
ical
acce
lera
tion
PSD
(m2 middotsndash3
)X 209Y 0558
X 209Y 0374
ndash3297
(a)
PHMSHM without optimizationSHM with optimization
0
02
04
06
X 209Y 0361
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 209Y 0256
ndash2908
05 1 2 4 8 16 32 64Frequency (Hz)
(b)
PHMSHM without optimizationSHM with optimization
0
01
X 259Y 0059
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3)
X 259Y 0021
ndash6440
05 1 2 4 8 16 32 64Frequency (Hz)
(c)
Figure 8 Results of the PSD acceleration responses on the deformable terrain (a) Vertical driverrsquos seat (b) Cabrsquos pitch angle (c) Cabrsquos rollangle
PHMSHM without optimizationSHM with optimization
45 46 47 48 49 50ndash4
ndash2
0
2
4
Time (s)
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
(a)
PHMSHM without optimizationSHM with optimization
ndash4
ndash2
0
2
4
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
45 46 47 48 49 50Time (s)
(b)
Figure 9 Continued
10 Shock and Vibration
PHMSHM without optimizationSHM with optimization
ndash03
ndash02
ndash01
0
01
02
03
Roll
acce
lera
tion
(rad
middotsndash2)
45 46 47 48 49 50Time (s)
(c)
Figure 9 Results of the acceleration responses on the deformable terrain (a) Vertical driverrsquos seat (b) Cabrsquos pitch angle (c) Cabrsquos roll angle
05 1 2 4 8 16 32 640
01
02
03
04
X 569Y 0074
Frequency (Hz)
Vert
ical
acce
lera
tion
PSD
(m2 middotsndash3
)
X 2818Y 0014
X 209Y 0376 ndash2446
PHMSHM without optimizationSHM with optimization
X 209Y 0284
(a)
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
X 2818Y 0033
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 569Y 0045
X 209Y 0197
X 209Y 0135
ndash3147
PHMSHM without optimizationSHM with optimization
(b)
05 1 2 4 8 16 32 64Frequency (Hz)
0
001
002
003
004
X 2818Y 0008
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3) X 249
Y 0032
X 269Y 0013 X 569
Y 0011
ndash5937
PHMSHM without optimizationSHM with optimization
(c)
Figure 10 Results of the PSD acceleration responses under a low excitation frequency 28Hz of the drum (a) Vertical driverrsquos seat (b)Cabrsquos pitch angle (c) Cabrsquos roll angle
Shock and Vibration 11
parameters of the high elastoplastic soil ground includesε 087 ksp 283times106Nmiddotmminus1 kse 423times106Nmiddotmminus1 andcse 371times 103Nsmiddotmminus1
e comparison results of the PSD acceleration responsesof the vertical driverrsquos seat cabrsquos pitch and roll vibrations withthe cabrsquos isolation systems at a lowhigh excitation frequency2835Hz of the vibratory drum are seen in Figures 10 and 11Similarly in the condition of the vehicle traveling the res-onance frequencies of PSD acceleration responses of thevertical driverrsquos seat cabrsquos pitch and roll vibrations of SHMwithout optimization and SHM with optimization are alsounchanged in comparison with PHM e simulation resultsalso show that the resonance frequencies of SHM withoutoptimization and SHMwith optimization also occur at 28183518Hz comparable with PHM in all three directions iscan be due to the effect of the resonance at a lowhigh ex-citation frequency 2835Hz of the vibratory drum In ad-dition the resonance frequency of the acceleration PSDresponses of all cabrsquos isolation systems clearly appears at569Hz in both graphs of Figures 10 and 11 whereas thisresonance frequency does not occur in the graph of Figure 8
is particularity may be due to the effect of the soil stiffnesswith the high-density soil ground
Besides at a low-frequency range below 4Hz themaximum resonance peaks of the PSD acceleration re-sponses of the vertical driverrsquos seat cabrsquos pitch and rollvibrations of SHMwith optimization are strongly reduced incomparison with PHM by 2446 3147 and 5937 at alow excitation frequency 28Hz of the drum and by 17763352 and 5385 at a high excitation frequency 35Hz ofthe drum respectively is is also due to the main impact ofthe semi-active damping force of hydraulic mountfd ch| _z| _z + u Contrarily at a frequency range upper 4Hzthe PSD acceleration responses of the vertical driverrsquos seatcabrsquos pitch and roll vibrations of SHMwithout optimizationand SHM with optimization are slightly increased incomparison with PHM especially at the resonance fre-quency of 569Hz However the PSD acceleration values arevery small erefore the driverrsquos health can be clearlyimproved by using SHM with optimization in the low-frequency region when the vehicle moves and compactson an elastoplastic soil ground
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
03
04Ve
rtic
al ac
cele
ratio
n PS
D (m
2 middotsndash3)
X 3518Y 00018
X 569Y 0031
X 209Y 0321
X 209Y 0264
ndash1776
PHMSHM without optimizationSHM with optimization
(a)
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 3518Y 0015
X 569Y 0019
X 209Y 0182
X 209Y 0121
ndash3352
PHMSHM without optimizationSHM with optimization
(b)
05 1 2 4 8 16 32 64Frequency (Hz)
0
001
002
003
004
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3)
X 569Y 0004
X 249Y 0026
X 3518Y 00035
X 269Y 0012
ndash5385
PHMSHM without optimizationSHM with optimization
(c)
Figure 11 Results of the PSD acceleration responses under a high excitation frequency 35Hz of the drum (a) Vertical driverrsquos seat (b)Cabrsquos pitch angle (c) Cabrsquos roll angle
12 Shock and Vibration
45 46 47 48 49 50ndash2
ndash1
0
1
2
Time (s)
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(a)
45 46 47 48 49 50Time (s)
ndash1
ndash05
0
05
1
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(b)
45 46 47 48 49 50Time (s)
ndash01
ndash005
0
005
01
Roll
acce
lera
tion
(rad
middotsndash2)
PHMSHM without optimizationSHM with optimization
(c)
Figure 12 Results of the acceleration responses under a low excitation frequency 28Hz of the drum (a) Vertical driverrsquos seat (b) Cabrsquospitch angle (c) Cabrsquos roll angle
45 46 47 48 49 50Time (s)
ndash2
ndash1
0
1
2
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(a)
45 46 47 48 49 50Time (s)
ndash1
ndash05
0
05
1
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(b)
Figure 13 Continued
Shock and Vibration 13
e simulation results in Figures 12 and 13 also showthat the acceleration responses of the vertical driverrsquos seatcabrsquos pitch and roll vibrations of SHM with optimizationare lower than both PHM and SHM without optimizationBesides the values of the weighted RMS accelerationresponses are also listed in Tables 3 and 4 e weightedRMS values of the vertical driverrsquos seat cabrsquos pitch androll vibrations of SHM with optimization are greatly re-duced in comparison with SHM by 3516 4829 and3765 under a low excitation frequency 28 Hz of thedrum and by 2480 4315 and 3606 under a highexcitation frequency 35 Hz of the drum respectivelyConsequently the above analysis results also indicate thatthe driverrsquos ride comfort and health are strongly improvedby SHM with optimization when the vehicle moves andcompacts on the high elastoplastic soil ground under boththe lowhigh excitation frequency 2835 Hz of the vi-bratory drum
5 Conclusions
Modeling and low-frequency performance analysis of semi-active cabrsquos hydraulic mounts of the off-road vibratory rollerare addressed in this work e comparison between thesimulation and test results of passive cabrsquos isolation mounts
is also carried out e low-frequency performance of SHMusing the optimal fuzzy-PID controller is then evaluatedthrough the PSD acceleration and weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibrations inboth the frequency and time domains e results aresummarized as follows
(1) In the condition of the vehicle traveling the weightedRMS acceleration responses and the PSD accelera-tion responses of the vertical driverrsquos seat cabrsquos pitchand roll vibrations of SHM with optimization arelower than both PHM and SHM without optimi-zation Particularly the weighted RMS values ofSHM with optimization are strongly reduced incomparison with PHM by 3499 4256 and4172 respectively
(2) In condition of the vehicle working both PSD ac-celeration responses and the weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibra-tions of SHM using the optimal fuzzy-PID controllerare clearly smaller comparable with both PHM andSHM without optimization under both lowhighexcitation frequency 2835Hz of the drum on thehigh elastoplastic soil ground Especially the maxi-mum PSD values of the vertical driverrsquos seat cabrsquos
45 46 47 48 49 50Time (s)
ndash01
ndash005
0
005
01
Roll
acce
lera
tion
(rad
middotsndash2)
PHMSHM without optimizationSHM with optimization
(c)
Figure 13 Results of the acceleration responses under a high excitation frequency 35Hz of the drum (a) Vertical driverrsquos seat (b) Cabrsquospitch angle (c) Cabrsquos roll angle
Table 3 e weighted RMS values under a low excitation frequency 28Hz of the drum
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 0657 0501 0426 3516awϕc (radmiddotsminus2) 0323 0184 0167 4829awθc (radmiddotsminus2) 0085 0056 0053 3765
Table 4 e weighted RMS values under a high excitation frequency 35Hz of the drum
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 0512 0453 0385 2480awϕc (radmiddotsminus2) 0241 0162 0137 4315awθc (radmiddotsminus2) 0061 0040 0039 3606
14 Shock and Vibration
pitch and roll vibrations of SHM with optimizationare strongly reduced by 2446 3147 and 5937in comparison with PHM when the vehicle compactsat a low excitation frequency 28Hz of the drum
(3) e above analysis results indicate that the low-frequency and high-stiffness characteristics of SHMusing the optimal fuzzy-PID controller have the besteffect on isolating low-frequency vibration trans-mitted and controlling the cab shaking under variousoperating conditions of the off-road vibratory roller
Data Availability
e data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] V Liem J Zhang V Quynh and R Jiao ldquoVibration analysisand modeling of an off-road vibratory roller equipped withthree different cabrsquos isolation mountsrdquo Shock and Vibrationvol 2018 Article ID 8527574 17 pages 2018
[2] D Adam and F Kopf ldquoeoretical analysis of dynamicallyloaded soilsrdquo in Proceedings of the European WorkshopCompaction of Soils and Granular Materials pp 207ndash217Paris France 2000
[3] J Li Z Zhang H Xu and Z Feng ldquoDynamic characteristicsof the vibratory roller test-bed vibration isolation systemsimulation and experimentrdquo Journal of Terramechanicsvol 56 pp 139ndash156 2014
[4] J Paul and A Michael ldquoCapturing nonlinear vibratory rollercompactor behavior through lumped parameter modelingrdquoJournal of Engineering Mechanics vol 134 no 8 pp 684ndash6932008
[5] X Zhang Modelling simulation and optimization of ridecomfort for off road articulated dump trucks PhD thesisSoutheast University Nanjing China 2010
[6] A Pakowski and D Cao ldquoEffect of soil deformability on off-road vehicle ride dynamicsrdquo SAE International Journal ofCommercial Vehicles vol 6 no 2 pp 362ndash371 2013
[7] R A Irani R J Bauer and A Warkentin ldquoDynamic wheel-soil model for lightweight mobile robots with smooth wheelsrdquoJournal of Intelligent amp Robotic Systems vol 71 no 2pp 179ndash193 2013
[8] S Park A A Popov and D J Cole ldquoInfluence of soil de-formation on off-road heavy vehicle suspension vibrationrdquoJournal of Terramechanics vol 41 no 1 pp 41ndash68 2004
[9] A Kordestani S Rakheja P Marcotte A Pazooki andD Juras ldquoAnalysis of ride vibration environment of soilcompactorsrdquo SAE International Journal of Commercial Ve-hicles vol 3 no 1 pp 259ndash272 2010
[10] V Quynh Vibration study and control for cab of vibratoryroller PhD thesis Southeast University Nanjing China2013
[11] M Griffin Handbook of Human Vibration Academic PressLondon UK 1990
[12] International Organization for Standardization ldquoMechanicalvibration and shock-evaluation of human exposure to wholebody vibration-part 2 general requirementsrdquo Tech Rep ISO2631-11997 ISO Geneva Switzerland 1997
[13] S Yildirim ldquoVibration control of suspension systems using aproposed neural networkrdquo Journal of Sound and Vibrationvol 277 no 4-5 pp 1059ndash1069 2004
[14] N Ebrahimi and A Gharaveisi ldquoOptimal fuzzy supervisorcontroller for an active suspension systemrdquo InternationalJournal of Soft Computing amp Engineering vol 2 no 4pp 36ndash39 2012
[15] Z Xie P Wong J Zhao T Xu and I Wong ldquoA noise-insensitive semi-active air suspension for heavy-duty vehicleswith an integrated fuzzy-wheelbase preview controlrdquo Math-ematical Problem in Engineering vol 2013 Article ID 12195312 pages 2013
[16] B Kasemi A G A Muthalif M M Rashid and S FathimaldquoFuzzy-PID controller for semi-active vibration control usingmagnetorheological fluid damperrdquo Procedia Engineeringvol 41 pp 1221ndash1227 2012
[17] T Nguyen A novel semi-active magnetorheological mount forvibration isolation PhD thesis e University of ToledoToledo OH USA 2009
[18] A Muthalif B Kasemi D Nordin and M Rashid ldquoSemi-active vibration control using experimental model of Mag-netorheological damper with adaptive fuzzy-PID controllerrdquoSmart Structures and Systems vol 20 no 1 pp 85ndash97 2017
[19] S D Nguyen Q H Nguyen and S-B Choi ldquoA hybridclustering based fuzzy structure for vibration control-part 2an application to semi-active vehicle seat-suspension systemrdquoMechanical Systems and Signal Processing vol 56-57pp 288ndash301 2015
[20] W Wang Y Song Y Xue H Jin J Hou and M Zhao ldquoAnoptimal vibration control strategy for a vehiclersquos active sus-pension based on improved cultural algorithmrdquo Applied SoftComputing vol 28 pp 167ndash174 2015
[21] Y Chen Z Wang J Qiu and Z Huang ldquoHybrid fuzzyskyhook surface control using multi-objective microgeneticalgorithm for semi-active vehicle suspension system ridecomfort stability analysisrdquo Journal of Dynamic SystemsMeasurement amp Control vol 134 no 4 pp 1ndash14 2012
[22] International Organization for Standardization ldquoReportingvehicle road surface irregularitiesrdquo Tech Rep ISOTC108SC2WG4 N57 ieme Medical Publishers Stuttgart Germany1982
[23] M Mitschke Dynamik der Kraftfahrzeuge Springer-VerlagBerlin Germany 1972
[24] M Rahmat ldquoApplication of selftuning fuzzy PID controlleron industrial hydraulic actuator using system identificationapproachrdquo International Journal on Smart Sensing amp In-telligent Systems vol 2 no 2 pp 246ndash261 2009
[25] E H Mamdani and S Assilian ldquoAn experiment in linguisticsynthesis with a fuzzy logic controllerrdquo International Journalof Man-Machine Studies vol 7 no 1 pp 1ndash13 1975
[26] Z Nariman M Salehpour A Jamali and E HanghgooldquoPareto optimization of a five-degree of freedom vehicle vi-bration model using a MUGArdquo Engineering Applications ofArtificial Intelligence vol 23 no 4 pp 543ndash551 2010
[27] H John G Michael and D Gregory ldquoMulti-objective controloptimization for semi-active vehicle suspensionsrdquo Journal ofSound and Vibration vol 330 pp 5502ndash5516 2011
[28] J Y Wong ldquoData processing methodology in the charac-terization of the mechanical properties of terrainrdquo Journal ofTerramechanics vol 17 no 1 pp 13ndash41 1980
Shock and Vibration 15
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

0 10 20 30 40 50ndash004
ndash002
0
002
004
Time (s)
Rand
om te
rrai
n (m
)
Off-road terrain roughness
(a)
10ndash1 100 10110ndash8
10ndash6
10ndash4
10ndash2
100
Frequency (Hz)
Off-
road
PSD
(m2 middotH
zndash1)
Simulated terrain PSD
Poor target PSD
(b)
Figure 3 Generation of the o-road terrain roughness according to unpaved o-road classication (a) O-road terrain prole (b) Spectraldensities
05 1 2 4 8 16 32 6410ndash4
10ndash3
10ndash2
10ndash1
100
Frequency (Hz)
X 2818Y 0004
Vert
ical
acce
lera
tion
PSD
(m2 middotsndash3
)
Experiment with PRMSimulation with PRMSimulation with PHM
(a)
05 1 2 4 8 16 32 6410ndash4
10ndash3
10ndash2
10ndash1
100
Frequency (Hz)
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)X 2818Y 0037
Experiment with PRMSimulation with PRMSimulation with PHM
(b)
Experiment with PRMSimulation with PRMSimulation with PHM
05 1 2 4 8 16 32 6410ndash5
10ndash4
10ndash3
10ndash2
10ndash1
100
Frequency (Hz)
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3)
X 2818Y 0007
(c)
Experiment with PRMSimulation with PRMSimulation with PHM
03
0
06
09
12
Wei
ghte
d RM
S va
lues
ϕc θczs
0794mmiddotsndash2
0657mmiddotsndash20713mmiddotsndash2
0323radmiddotsndash20396radmiddotsndash2
0446radmiddotsndash2
0085radmiddotsndash2
0150radmiddotsndash2
0131radmiddotsndash2
Degrees of freedom
(d)
Figure 4e experimental and simulation results under an excitation frequency 28Hz of the drum [1] (a) PSD acceleration response of thevertical driverrsquos seat (b) PSD acceleration response of the cabrsquos pitch angle (c) PSD acceleration response of the cabrsquos roll angle (d)Weighted RMS values of the driverrsquos seat and the cab
Shock and Vibration 5
3 Design of the Optimal Fuzzy-PID Controller
31 Modeling of the Optimal Fuzzy-PID Control e PIDcontrol is one of the controllers with not only a simplestructure but also robust performance and it is generallyused in industrial process control However the perfor-mance of PID control depends on the appropriate selectionof the PIDrsquos parameters e well-known Ziegler-Nicholstechnique has been used to choose the PIDrsquos parametersHowever it is only efficient when the system works at thedesigned operating condition Contrariwise the fuzzy logiccontrol (FLC) does not depend on the designed operatingcondition it only depends on the appropriate selection of thefuzzy inference system (FIS) However the shortcomings ofFLC are low precision and stability In order to avoidshortcomings of both FLC and PID control fuzzy-PIDcontrol had been developed [18 20 24] In this study toenhance the control performance of fuzzy-PID control(FPC) the control rules in FIS optimized via the geneticalgorithm (GA) program are then developed and applied forthe FPCrsquos optimization
In the cabrsquos isolationmounts there are four SHMs whichshould be separately controlled thus four optimal fuzzy-PID controls should be designed However the designprocess of these controls is the same erefore a specific ofthe optimal FPC is designed to control the active dampingforce of MR fluid e model of the optimal FPC for SHM isdepicted in Figure 5(a)
In Figure 5(a) fuzzy-PID control includes two inputsand three outputs in which 2 inputs denoted by E and EC arethe vertical displacement error (E) and the vertical velocityerror (EC) of the cab frame and 3 outputs denoted byKpprime Kiprime andKdprime are the proportionality factors respectivelye proportional integral and derivative parameters in PIDcontrol are defined by Kp Ki and Kd which can be auto-matically tuned and depend on the parametersKpprime Kiprime andKdprime of the FLC and the actual control force ofMR fluid u(t) is decided by the PID control the control forcefd of SHM is then used for subsystem of the vehicle In orderto enhance the further performance of the FPC the GAprogram is used to optimize the control rules in FIS via thesubsystem of the vehicle and the objective functions
e force output of the PID control is given by
u(t) Kpe(t) + Ki 1113946t
0e(t)dt + Kd _e(t) (5)
where e(t) is the displacement error the cab framee initial values of proportionality factors in equation
(5) determined by the Ziegler-Nichols method via thesubsystem model are Kp(0) 1985 Ki(0) 18 and Kd(0)
12 In order to find the best values for Kp Ki and Kd weassume their variable ranges as [KpminKpmax] [KiminKimax]and [Kdmin Kdmax] respectively us based on the initialvalues the range of each parameter is chosen by Kp isin [1002500] Ki isin [1 100] and Kd isin [01 10]
e next is a design of the FLC e basic fuzzy controlconsists of the following major parts fuzzification interfaceFIS and defuzzification interface First the crisp values infuzzification are transformed into linguistic variables FIS is
then used by control rules in accordance with inferencerules and finally the linguistic variables are transformedback to crisp values through defuzzification for use by thephysical plant [25] erefore the FPC can be designed inthree steps below
(i) Choosing the fuzzy control input-output two inputvariables E and EC belong to [minus025 025] Besidesthree output variables Kpprime Kiprime andKdprime are calibratedover the interval [0 1] as follows [24]
Kpprime
Kp minusKpmin
Kpmax minusKpmin
Kiprime
Ki minusKimin
Kimax minusKimin
Kdprime
Kd minusKdmin
Kdmax minusKdmin
(6)
Hence the input values in equation (5) are re-spectively Kp 2400Kpprime + 100 Ki 99Kiprime + 1 andKd 99Kdprime + 01e linguistic variables of two inputs are defined bythe positive big (PB) positive small (PS) zero (ZO)negative small (NS) and negative big (NB) Besidesthe linguistic variables of three outputs are alsodefined as small (S) medium small (MS) medium(M) medium big (MB) and big (B) respectively
(ii) Membership function the shape of membershipfunctions of input-output variables is used by thetriangular function and its degree of membership isbetween 0 and 1 as shown in Figure 5(b)
(iii) e FISrsquos rules the initial control rules are given bythe designerrsquos knowledge and experience as follows
(1) If E is NB and EC is NB then Kpprime is MS Kiprime is Sand Kdprime is S
(2) If E is NB and EC is NS then Kpprime isM Kiprime is MSand Kdprime is S
(25) If E is PB and EC is PB then Kpprime is B Kiprime is MBand Kdprime is MB
where FIS is selected by the minimum function andthe centroid method of Mamdani and Assilian [25]and the above control rules are then optimized byGA program through the subsystem model
32 Optimization of the Control Rules Based on theGA Program
321 GA Program GA is an optimization method based onprinciples of natural selection It seeks the maximum or theminimum values of one or more objective functions usingcomputational techniques motivated by biological re-production erefore GA is defined as finding a vector ofdecisive variables that satisfies constraints to give acceptablevalues to all objective functions [26 27] and it can be writtenas follows
6 Shock and Vibration
Find the vector x [x1 x2 xn]T to optimize
F(x) f1(x) f2(x) fn(x)[ ]Tsubject togi(x)le 0 i 1 2 p
hj(x) 0 j 1 2 q
(7)
where F(x) is the vector of objective functions which mustbe either maximized or minimized and p and q are numbersof inequality constraints and equality constraints
GA is structured into the following steps encodingpopulation initialization tness evaluation parent selectiongenetic operations (crossover and mutate) and terminationcriterione ow chart of the GA program for SHM is builtin Figure 6
322 Application of GA Program to Optimize the ControlRules e goal main of GA is to seek the optimal controlrules in FIS to get the minimum values of the weighted RMSacceleration responses of the vertical driverrsquos seat cabrsquospitch and roll vibrations via the subsystem model inFigure 5(a) erefore GArsquos structure is built as follows
(i) Encoding mechanism and initial population in ldquo(iii)e FISrsquos rulesrdquo there are 25 control rules thatcontain a total of 75 elements e 75 elements arethen connected into a string of numbers as achromosome which is regarded as a vectorEncoding mechanism can shorten the chromosomelength of the individuals in population space toenhance the running speed and to reduce thesearching space of the algorithm program us thelinguistic variables of two inputs (E and EC) areencoded by the numbers as [NB NS ZO PS PB][0 1 2 3 4] [aj]1times5 and the linguistic variables ofthree outputs (Kpprime Kiprime andKdprime) are encoded by thenumbers as [S MS M MB B] [5 6 7 8 9] [bj]1times5 Besides the individuals in the initial pop-ulation are randomly generated For each gene thevalue of that gene is also selected as a randompositive integer in the range of 0le ajle 4 and5le bjle 9 and the size of the initial population is 100
(ii) Objective function and tness value the minimumvalues of the weighted RMS acceleration responses(awl) of the vertical driverrsquos seat cabrsquos pitch and rollvibrations are selected as objective functions in this
study e expression of objective functions iswritten in equation (9) In order to nd the mini-mum values of the weighted RMS acceleration re-sponses the tness value J is greatly simplied tocalculate objective functions as follows [20 27]
J 1
sum αla2wl (8)
where subscript l refers to the vertical driverrsquos seat(zs) cabrsquos pitch (ϕc) or cabrsquos roll (θc) vibrations andαl is the scalar that weighted or percent of theweighted RMS values in le individuals with the higher tness value Jwhichis obtained via the subsystem model show that theobtained control rules in ldquo(iii) e FISrsquos rulesrdquo arebetter erefore the resultant individuals areupdated before the evolution process ends and theoptimal individuals can be obtained
(iii) Genetic operations after establishing the initialpopulation and selecting the parents Genetic oper-ations (including crossover and mutation) are thenperformed Herein crossover probability of 095 andmutation probability of 005 have been used in 200
Subsystem ofvibratory roller
SHM withRM damper
Fuzzy
FIS
GA(J)Off-road terrain
EECfd
u(Desired)
awzsawϕcawθc
PID control
(Kpprime Ki
prime Kdprime)
(a)
Kprime
p
Kprime
i
Kprime
d
Control rules(Mamdani)
E
EC
(b)
Figure 5 Structure of the vehicle model with SHM (a) Optimal fuzzy-PID control model (b) FLC control
Yes
No
Initialize population
Select parents
Update FIS and simulatethe Simulink system
Evolutionalnumber of times
End
Initialize parents and establish FIS
Start
Crossover
Mutation
Gen
etic
ope
ratio
ns
Selection
Evaluate the fitnessvalues of individuals
Output the control rulecode and fitness curve
Acceptance function
Figure 6 e ow chart of the GA program for SHM
Shock and Vibration 7
generations erefore the arithmetic crossover isperformed on 95 of the selected parents wherebytwo children are created from the weighted sum oftwo parents and children of the remaining 5 ofselected parents are exact copies of the parentsCrossover operation is performed until the pop-ulation number is doubled en each individualundergoes the mutation operation which is theprocess of randomly changing the values of genes in achromosomewith a probability of 005emutationcan create new genetic material into an existingindividual and add diversity to the genetic charac-teristics of the population Finally through the fitnessvalue J only the optimal individuals are selected atthe end of each generation to exist as the populationof the next generation For the termination criterionthe limitary generation is used then the resultantpopulation is evaluated to determine convergence
323 Optimal Result of the Control Rules In order to seekthe optimal control rules for the FPC we assume that thevibratory roller travels on the deformable terrain at a constantspeed v0 167mmiddotsminus1 and off-road terrain excitation input q(t)of the subsystem model is chosen as in Figure 3(a) with thesimulation time of 10 se scalar that weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibrations areαz 0486 αϕ 0449 and αθ 0065 respectively which aredecided based on the percent of the weighted RMS value of thevertical driverrsquos seat (486) cabrsquos pitch (449) and cabrsquos rollvibrations (65) with the weighted RMS values of the PHM inTable 1 e maximum generation is 200
e result in Figure 7 shows that the maximum fitnessvalue J is obtained from the evolutionary generation of 133to the end erefore the optimal individuals can be ob-tained at the generation of 133 By recording the optimalcontrol rules in FIS are listed in Table 2 e optimal controlrules are then used for the optimal FPC to simulate andanalyze the low-frequency performance of semi-active cabrsquoshydraulic mounts
4 Results and Discussion
41 Evaluation Criteria e performance of the vehiclesuspension system is evaluated by three main indices in thetime domain including the ride comfort working space androad holding characteristics
Among these three indices the ride comfort perfor-mance evaluated via the weighted RMS acceleration re-sponse is considered to be the most important index [1] Inaddition in the international standard ISO 2631-1 [12] thePSD acceleration response is also applied to estimate theeffect of vibration on the endurance limit of the human bodyin the frequency domain It was suggested that a low-frequency range of 4ndash10Hz for the vertical and of 05ndash2Hz for the rotational vibrations seriously affected thedriverrsquos health and safety In this study the performance ofSHM also is evaluated through both the PSD and theweighted RMS acceleration responses of the vertical driverrsquos
seat cabrsquos pitch and roll vibrations in the frequency andtime domains us the smaller PSD and weighted RMSvalues mean to be the better ability of the correspondingisolation mounts e expression of RMS was given by
awl
1T
1113946T
0euroxl(t)1113858 1113859
2dt
1113971
(9)
where euroxl(t) is the acceleration response in the l as a functionof time and T 50 s is the time of simulation
42 Control Performance When the Vehicle Travels on theDeformableTerrain In this study the vehicle is assumed to betraveling on a terrain type of Grenville loam given by Wong[28] at a constant speed v0 167mmiddotsminus1 e Grenville loamrsquosparameters including n 101 kc 006times103Nmiddotmminus(n+1)kφ 5880times103Nmiddotmminus(n+2) c 31times 103 Pa φ 298deg and itsoff-road terrain irregularity as in Figures 3(a) are the randomexcitation inputs of the simulatingmodel Simulations are thencarried out to analyze the low-frequency performance of SHMbased on the design parameters of a single drum vibratoryroller [1]
A good cabrsquos isolation system should be able to minimizeits deflection and acceleration to enhance the driverrsquos ridecomfort In addition the driverrsquos mental and physical healthis affected not only by the acceleration responses in the timeregion but also by the PSD acceleration responses in the low-frequency region [11]erefore the maximum PSD and theweighted RMS values of the vertical driverrsquos seat cab pitchand roll vibrations are respectively given to compare thelow-frequency performance of SHM
e simulation results of the PSD acceleration responsesof the vertical driverrsquos seat cabrsquos pitch and roll vibrations areplotted in Figures 8(a)ndash8(c) respectively In Figure 8 theresonance frequencies of PSD acceleration responses of thevertical driverrsquos seat cabrsquos pitch and roll vibrations withSHM without optimization and with optimization have notbeen changed in comparison with PHM is can be due tothe fact that stiffness coefficients of the cabrsquos isolation systemare unchanged and its damping control forces have almostno effect on the resonance frequencies However themaximum resonance peaks of the PSD acceleration re-sponses are significantly transformed by the SHM
e maximum resonance peaks of the PSD accelerationresponses of the vertical driverrsquos seat cabrsquos pitch and rollvibrations of SHM without optimization are smaller thanPHM Meanwhile the maximum resonance peaks of the PSDacceleration responses of SHM with optimization are thesmallest Especially in low-frequency below 4Hz the maxi-mum PSD values of the vertical driverrsquos seat cabrsquos pitch androll vibrations of SHM with optimization are greatly reducedby 3297 2908 and 6440 in comparison with PHMrespectively is is due to the main impact of the semi-activedamping force of hydraulic mount fd ch| _z| _z + u ere-fore the health of the driver can be clearly improved by SHMusing the optimal fuzzy-PID controller
e simulation results of the acceleration responses arealso shown in Figures 9(a)ndash9(c) In Figure 9 we can see that
8 Shock and Vibration
the acceleration responses of SHM with optimization arelower than both PHM and SHM without optimizationBesides the weighted RMS acceleration responses in Table 1also show that the weighted RMS values of the verticaldriverrsquos seat cabrsquos pitch and roll vibrations of SHM withoptimization are strongly reduced by 3499 4256 and4172 in comparison with PHM respectively e aboveanalysis results indicate that when the vehicle travels on thedeformable terrain the driverrsquos ride comfort can be clearlyimproved by SHM with optimization in both the time andthe low-frequency region erefore the SHM with opti-mization could provide the best ride comfort performancefor the off-road vibratory roller in the condition of thevehicle traveling
43 Control Performance When the Vehicle Moves andCompacts on the Elastoplastic Soil Ground In the workingcondition of the vibratory roller the effect of the elastoplasticsoil grounds on the performance of the compaction processwas studied under the excitation frequencies of the drum in arange of 01ndash70Hz [2ndash4 9] the research results showed thatcomprehensive drumsoil contact and loss of contact data
had appeared over a range of 15ndash40Hz [4] especially at theexcitation frequencies of 285Hz and 33Hz of the drumwhich yielded the maximum compaction forces due toldquodouble-jumprdquo of the drum [2 9] Based on the designparameters of a single drum vibratory roller [1] the exci-tation frequency of the vibratory drum in the workingcondition was also given at 28 and 35Hz therefore theexcitation frequencies of the vibratory drum at 28 and 35Hzwith the parameters of the vehicle [1] are used for simulationBesides in compression process of the drum the elastoplasticsoil properties are changed during the interaction between therigid drum and soil ground e elastoplastic soil propertiesare represented via three different values of the plasticityparameter ε including low-density soil ε 034 medium-density soil ε 072 and high-density soil ε 087 [9]However the elastoplastic property of low-density soil(ε 034) is similar to the property of a soft soil deformationwhich is simulated in the condition of the vehicle travelingerefore in order to evaluate the low-frequency perfor-mance of SHM in the condition of the vehicle working thevehicle is moved and compacted at very slow speed 083mmiddotsminus1under a lowhigh excitation frequency 2835Hz of the vi-bratory drum on a high elastoplastic soil ground e
50 100 150 2001
15
2
25
3X 133Y 2579
Evolutionary generations
J
Figure 7 e curve of fitness value
Table 1 e weighted RMS acceleration responses on a deformable terrain
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 1063 0875 0691 3499awϕc (radmiddotsminus2) 0982 0810 0564 4256awθc (radmiddotsminus2) 0139 0100 0081 4172
Table 2 Result of the optimal control rules
ECE
Kpprime Kiprime Kdprime
NB NS ZO PS PB NB NS ZO PS PB NB NS ZO PS PB
NB M MB B MS S S S M MB S S M B MB BNS MB M MS M MS S B MB MS M MS S M M SZO M S S S M MS MS S M MB M B S S MSPS MS M MS M B MS S M MB S MB MS S MS MSPB S MS M MB MB M M MS S S MS B S S M
Shock and Vibration 9
PHMSHM without optimizationSHM with optimization
05 1 2 4 8 16 32 640
02
04
06
08
Frequency (Hz)
Vert
ical
acce
lera
tion
PSD
(m2 middotsndash3
)X 209Y 0558
X 209Y 0374
ndash3297
(a)
PHMSHM without optimizationSHM with optimization
0
02
04
06
X 209Y 0361
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 209Y 0256
ndash2908
05 1 2 4 8 16 32 64Frequency (Hz)
(b)
PHMSHM without optimizationSHM with optimization
0
01
X 259Y 0059
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3)
X 259Y 0021
ndash6440
05 1 2 4 8 16 32 64Frequency (Hz)
(c)
Figure 8 Results of the PSD acceleration responses on the deformable terrain (a) Vertical driverrsquos seat (b) Cabrsquos pitch angle (c) Cabrsquos rollangle
PHMSHM without optimizationSHM with optimization
45 46 47 48 49 50ndash4
ndash2
0
2
4
Time (s)
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
(a)
PHMSHM without optimizationSHM with optimization
ndash4
ndash2
0
2
4
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
45 46 47 48 49 50Time (s)
(b)
Figure 9 Continued
10 Shock and Vibration
PHMSHM without optimizationSHM with optimization
ndash03
ndash02
ndash01
0
01
02
03
Roll
acce
lera
tion
(rad
middotsndash2)
45 46 47 48 49 50Time (s)
(c)
Figure 9 Results of the acceleration responses on the deformable terrain (a) Vertical driverrsquos seat (b) Cabrsquos pitch angle (c) Cabrsquos roll angle
05 1 2 4 8 16 32 640
01
02
03
04
X 569Y 0074
Frequency (Hz)
Vert
ical
acce
lera
tion
PSD
(m2 middotsndash3
)
X 2818Y 0014
X 209Y 0376 ndash2446
PHMSHM without optimizationSHM with optimization
X 209Y 0284
(a)
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
X 2818Y 0033
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 569Y 0045
X 209Y 0197
X 209Y 0135
ndash3147
PHMSHM without optimizationSHM with optimization
(b)
05 1 2 4 8 16 32 64Frequency (Hz)
0
001
002
003
004
X 2818Y 0008
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3) X 249
Y 0032
X 269Y 0013 X 569
Y 0011
ndash5937
PHMSHM without optimizationSHM with optimization
(c)
Figure 10 Results of the PSD acceleration responses under a low excitation frequency 28Hz of the drum (a) Vertical driverrsquos seat (b)Cabrsquos pitch angle (c) Cabrsquos roll angle
Shock and Vibration 11
parameters of the high elastoplastic soil ground includesε 087 ksp 283times106Nmiddotmminus1 kse 423times106Nmiddotmminus1 andcse 371times 103Nsmiddotmminus1
e comparison results of the PSD acceleration responsesof the vertical driverrsquos seat cabrsquos pitch and roll vibrations withthe cabrsquos isolation systems at a lowhigh excitation frequency2835Hz of the vibratory drum are seen in Figures 10 and 11Similarly in the condition of the vehicle traveling the res-onance frequencies of PSD acceleration responses of thevertical driverrsquos seat cabrsquos pitch and roll vibrations of SHMwithout optimization and SHM with optimization are alsounchanged in comparison with PHM e simulation resultsalso show that the resonance frequencies of SHM withoutoptimization and SHMwith optimization also occur at 28183518Hz comparable with PHM in all three directions iscan be due to the effect of the resonance at a lowhigh ex-citation frequency 2835Hz of the vibratory drum In ad-dition the resonance frequency of the acceleration PSDresponses of all cabrsquos isolation systems clearly appears at569Hz in both graphs of Figures 10 and 11 whereas thisresonance frequency does not occur in the graph of Figure 8
is particularity may be due to the effect of the soil stiffnesswith the high-density soil ground
Besides at a low-frequency range below 4Hz themaximum resonance peaks of the PSD acceleration re-sponses of the vertical driverrsquos seat cabrsquos pitch and rollvibrations of SHMwith optimization are strongly reduced incomparison with PHM by 2446 3147 and 5937 at alow excitation frequency 28Hz of the drum and by 17763352 and 5385 at a high excitation frequency 35Hz ofthe drum respectively is is also due to the main impact ofthe semi-active damping force of hydraulic mountfd ch| _z| _z + u Contrarily at a frequency range upper 4Hzthe PSD acceleration responses of the vertical driverrsquos seatcabrsquos pitch and roll vibrations of SHMwithout optimizationand SHM with optimization are slightly increased incomparison with PHM especially at the resonance fre-quency of 569Hz However the PSD acceleration values arevery small erefore the driverrsquos health can be clearlyimproved by using SHM with optimization in the low-frequency region when the vehicle moves and compactson an elastoplastic soil ground
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
03
04Ve
rtic
al ac
cele
ratio
n PS
D (m
2 middotsndash3)
X 3518Y 00018
X 569Y 0031
X 209Y 0321
X 209Y 0264
ndash1776
PHMSHM without optimizationSHM with optimization
(a)
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 3518Y 0015
X 569Y 0019
X 209Y 0182
X 209Y 0121
ndash3352
PHMSHM without optimizationSHM with optimization
(b)
05 1 2 4 8 16 32 64Frequency (Hz)
0
001
002
003
004
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3)
X 569Y 0004
X 249Y 0026
X 3518Y 00035
X 269Y 0012
ndash5385
PHMSHM without optimizationSHM with optimization
(c)
Figure 11 Results of the PSD acceleration responses under a high excitation frequency 35Hz of the drum (a) Vertical driverrsquos seat (b)Cabrsquos pitch angle (c) Cabrsquos roll angle
12 Shock and Vibration
45 46 47 48 49 50ndash2
ndash1
0
1
2
Time (s)
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(a)
45 46 47 48 49 50Time (s)
ndash1
ndash05
0
05
1
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(b)
45 46 47 48 49 50Time (s)
ndash01
ndash005
0
005
01
Roll
acce
lera
tion
(rad
middotsndash2)
PHMSHM without optimizationSHM with optimization
(c)
Figure 12 Results of the acceleration responses under a low excitation frequency 28Hz of the drum (a) Vertical driverrsquos seat (b) Cabrsquospitch angle (c) Cabrsquos roll angle
45 46 47 48 49 50Time (s)
ndash2
ndash1
0
1
2
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(a)
45 46 47 48 49 50Time (s)
ndash1
ndash05
0
05
1
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(b)
Figure 13 Continued
Shock and Vibration 13
e simulation results in Figures 12 and 13 also showthat the acceleration responses of the vertical driverrsquos seatcabrsquos pitch and roll vibrations of SHM with optimizationare lower than both PHM and SHM without optimizationBesides the values of the weighted RMS accelerationresponses are also listed in Tables 3 and 4 e weightedRMS values of the vertical driverrsquos seat cabrsquos pitch androll vibrations of SHM with optimization are greatly re-duced in comparison with SHM by 3516 4829 and3765 under a low excitation frequency 28 Hz of thedrum and by 2480 4315 and 3606 under a highexcitation frequency 35 Hz of the drum respectivelyConsequently the above analysis results also indicate thatthe driverrsquos ride comfort and health are strongly improvedby SHM with optimization when the vehicle moves andcompacts on the high elastoplastic soil ground under boththe lowhigh excitation frequency 2835 Hz of the vi-bratory drum
5 Conclusions
Modeling and low-frequency performance analysis of semi-active cabrsquos hydraulic mounts of the off-road vibratory rollerare addressed in this work e comparison between thesimulation and test results of passive cabrsquos isolation mounts
is also carried out e low-frequency performance of SHMusing the optimal fuzzy-PID controller is then evaluatedthrough the PSD acceleration and weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibrations inboth the frequency and time domains e results aresummarized as follows
(1) In the condition of the vehicle traveling the weightedRMS acceleration responses and the PSD accelera-tion responses of the vertical driverrsquos seat cabrsquos pitchand roll vibrations of SHM with optimization arelower than both PHM and SHM without optimi-zation Particularly the weighted RMS values ofSHM with optimization are strongly reduced incomparison with PHM by 3499 4256 and4172 respectively
(2) In condition of the vehicle working both PSD ac-celeration responses and the weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibra-tions of SHM using the optimal fuzzy-PID controllerare clearly smaller comparable with both PHM andSHM without optimization under both lowhighexcitation frequency 2835Hz of the drum on thehigh elastoplastic soil ground Especially the maxi-mum PSD values of the vertical driverrsquos seat cabrsquos
45 46 47 48 49 50Time (s)
ndash01
ndash005
0
005
01
Roll
acce
lera
tion
(rad
middotsndash2)
PHMSHM without optimizationSHM with optimization
(c)
Figure 13 Results of the acceleration responses under a high excitation frequency 35Hz of the drum (a) Vertical driverrsquos seat (b) Cabrsquospitch angle (c) Cabrsquos roll angle
Table 3 e weighted RMS values under a low excitation frequency 28Hz of the drum
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 0657 0501 0426 3516awϕc (radmiddotsminus2) 0323 0184 0167 4829awθc (radmiddotsminus2) 0085 0056 0053 3765
Table 4 e weighted RMS values under a high excitation frequency 35Hz of the drum
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 0512 0453 0385 2480awϕc (radmiddotsminus2) 0241 0162 0137 4315awθc (radmiddotsminus2) 0061 0040 0039 3606
14 Shock and Vibration
pitch and roll vibrations of SHM with optimizationare strongly reduced by 2446 3147 and 5937in comparison with PHM when the vehicle compactsat a low excitation frequency 28Hz of the drum
(3) e above analysis results indicate that the low-frequency and high-stiffness characteristics of SHMusing the optimal fuzzy-PID controller have the besteffect on isolating low-frequency vibration trans-mitted and controlling the cab shaking under variousoperating conditions of the off-road vibratory roller
Data Availability
e data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] V Liem J Zhang V Quynh and R Jiao ldquoVibration analysisand modeling of an off-road vibratory roller equipped withthree different cabrsquos isolation mountsrdquo Shock and Vibrationvol 2018 Article ID 8527574 17 pages 2018
[2] D Adam and F Kopf ldquoeoretical analysis of dynamicallyloaded soilsrdquo in Proceedings of the European WorkshopCompaction of Soils and Granular Materials pp 207ndash217Paris France 2000
[3] J Li Z Zhang H Xu and Z Feng ldquoDynamic characteristicsof the vibratory roller test-bed vibration isolation systemsimulation and experimentrdquo Journal of Terramechanicsvol 56 pp 139ndash156 2014
[4] J Paul and A Michael ldquoCapturing nonlinear vibratory rollercompactor behavior through lumped parameter modelingrdquoJournal of Engineering Mechanics vol 134 no 8 pp 684ndash6932008
[5] X Zhang Modelling simulation and optimization of ridecomfort for off road articulated dump trucks PhD thesisSoutheast University Nanjing China 2010
[6] A Pakowski and D Cao ldquoEffect of soil deformability on off-road vehicle ride dynamicsrdquo SAE International Journal ofCommercial Vehicles vol 6 no 2 pp 362ndash371 2013
[7] R A Irani R J Bauer and A Warkentin ldquoDynamic wheel-soil model for lightweight mobile robots with smooth wheelsrdquoJournal of Intelligent amp Robotic Systems vol 71 no 2pp 179ndash193 2013
[8] S Park A A Popov and D J Cole ldquoInfluence of soil de-formation on off-road heavy vehicle suspension vibrationrdquoJournal of Terramechanics vol 41 no 1 pp 41ndash68 2004
[9] A Kordestani S Rakheja P Marcotte A Pazooki andD Juras ldquoAnalysis of ride vibration environment of soilcompactorsrdquo SAE International Journal of Commercial Ve-hicles vol 3 no 1 pp 259ndash272 2010
[10] V Quynh Vibration study and control for cab of vibratoryroller PhD thesis Southeast University Nanjing China2013
[11] M Griffin Handbook of Human Vibration Academic PressLondon UK 1990
[12] International Organization for Standardization ldquoMechanicalvibration and shock-evaluation of human exposure to wholebody vibration-part 2 general requirementsrdquo Tech Rep ISO2631-11997 ISO Geneva Switzerland 1997
[13] S Yildirim ldquoVibration control of suspension systems using aproposed neural networkrdquo Journal of Sound and Vibrationvol 277 no 4-5 pp 1059ndash1069 2004
[14] N Ebrahimi and A Gharaveisi ldquoOptimal fuzzy supervisorcontroller for an active suspension systemrdquo InternationalJournal of Soft Computing amp Engineering vol 2 no 4pp 36ndash39 2012
[15] Z Xie P Wong J Zhao T Xu and I Wong ldquoA noise-insensitive semi-active air suspension for heavy-duty vehicleswith an integrated fuzzy-wheelbase preview controlrdquo Math-ematical Problem in Engineering vol 2013 Article ID 12195312 pages 2013
[16] B Kasemi A G A Muthalif M M Rashid and S FathimaldquoFuzzy-PID controller for semi-active vibration control usingmagnetorheological fluid damperrdquo Procedia Engineeringvol 41 pp 1221ndash1227 2012
[17] T Nguyen A novel semi-active magnetorheological mount forvibration isolation PhD thesis e University of ToledoToledo OH USA 2009
[18] A Muthalif B Kasemi D Nordin and M Rashid ldquoSemi-active vibration control using experimental model of Mag-netorheological damper with adaptive fuzzy-PID controllerrdquoSmart Structures and Systems vol 20 no 1 pp 85ndash97 2017
[19] S D Nguyen Q H Nguyen and S-B Choi ldquoA hybridclustering based fuzzy structure for vibration control-part 2an application to semi-active vehicle seat-suspension systemrdquoMechanical Systems and Signal Processing vol 56-57pp 288ndash301 2015
[20] W Wang Y Song Y Xue H Jin J Hou and M Zhao ldquoAnoptimal vibration control strategy for a vehiclersquos active sus-pension based on improved cultural algorithmrdquo Applied SoftComputing vol 28 pp 167ndash174 2015
[21] Y Chen Z Wang J Qiu and Z Huang ldquoHybrid fuzzyskyhook surface control using multi-objective microgeneticalgorithm for semi-active vehicle suspension system ridecomfort stability analysisrdquo Journal of Dynamic SystemsMeasurement amp Control vol 134 no 4 pp 1ndash14 2012
[22] International Organization for Standardization ldquoReportingvehicle road surface irregularitiesrdquo Tech Rep ISOTC108SC2WG4 N57 ieme Medical Publishers Stuttgart Germany1982
[23] M Mitschke Dynamik der Kraftfahrzeuge Springer-VerlagBerlin Germany 1972
[24] M Rahmat ldquoApplication of selftuning fuzzy PID controlleron industrial hydraulic actuator using system identificationapproachrdquo International Journal on Smart Sensing amp In-telligent Systems vol 2 no 2 pp 246ndash261 2009
[25] E H Mamdani and S Assilian ldquoAn experiment in linguisticsynthesis with a fuzzy logic controllerrdquo International Journalof Man-Machine Studies vol 7 no 1 pp 1ndash13 1975
[26] Z Nariman M Salehpour A Jamali and E HanghgooldquoPareto optimization of a five-degree of freedom vehicle vi-bration model using a MUGArdquo Engineering Applications ofArtificial Intelligence vol 23 no 4 pp 543ndash551 2010
[27] H John G Michael and D Gregory ldquoMulti-objective controloptimization for semi-active vehicle suspensionsrdquo Journal ofSound and Vibration vol 330 pp 5502ndash5516 2011
[28] J Y Wong ldquoData processing methodology in the charac-terization of the mechanical properties of terrainrdquo Journal ofTerramechanics vol 17 no 1 pp 13ndash41 1980
Shock and Vibration 15
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

3 Design of the Optimal Fuzzy-PID Controller
31 Modeling of the Optimal Fuzzy-PID Control e PIDcontrol is one of the controllers with not only a simplestructure but also robust performance and it is generallyused in industrial process control However the perfor-mance of PID control depends on the appropriate selectionof the PIDrsquos parameters e well-known Ziegler-Nicholstechnique has been used to choose the PIDrsquos parametersHowever it is only efficient when the system works at thedesigned operating condition Contrariwise the fuzzy logiccontrol (FLC) does not depend on the designed operatingcondition it only depends on the appropriate selection of thefuzzy inference system (FIS) However the shortcomings ofFLC are low precision and stability In order to avoidshortcomings of both FLC and PID control fuzzy-PIDcontrol had been developed [18 20 24] In this study toenhance the control performance of fuzzy-PID control(FPC) the control rules in FIS optimized via the geneticalgorithm (GA) program are then developed and applied forthe FPCrsquos optimization
In the cabrsquos isolationmounts there are four SHMs whichshould be separately controlled thus four optimal fuzzy-PID controls should be designed However the designprocess of these controls is the same erefore a specific ofthe optimal FPC is designed to control the active dampingforce of MR fluid e model of the optimal FPC for SHM isdepicted in Figure 5(a)
In Figure 5(a) fuzzy-PID control includes two inputsand three outputs in which 2 inputs denoted by E and EC arethe vertical displacement error (E) and the vertical velocityerror (EC) of the cab frame and 3 outputs denoted byKpprime Kiprime andKdprime are the proportionality factors respectivelye proportional integral and derivative parameters in PIDcontrol are defined by Kp Ki and Kd which can be auto-matically tuned and depend on the parametersKpprime Kiprime andKdprime of the FLC and the actual control force ofMR fluid u(t) is decided by the PID control the control forcefd of SHM is then used for subsystem of the vehicle In orderto enhance the further performance of the FPC the GAprogram is used to optimize the control rules in FIS via thesubsystem of the vehicle and the objective functions
e force output of the PID control is given by
u(t) Kpe(t) + Ki 1113946t
0e(t)dt + Kd _e(t) (5)
where e(t) is the displacement error the cab framee initial values of proportionality factors in equation
(5) determined by the Ziegler-Nichols method via thesubsystem model are Kp(0) 1985 Ki(0) 18 and Kd(0)
12 In order to find the best values for Kp Ki and Kd weassume their variable ranges as [KpminKpmax] [KiminKimax]and [Kdmin Kdmax] respectively us based on the initialvalues the range of each parameter is chosen by Kp isin [1002500] Ki isin [1 100] and Kd isin [01 10]
e next is a design of the FLC e basic fuzzy controlconsists of the following major parts fuzzification interfaceFIS and defuzzification interface First the crisp values infuzzification are transformed into linguistic variables FIS is
then used by control rules in accordance with inferencerules and finally the linguistic variables are transformedback to crisp values through defuzzification for use by thephysical plant [25] erefore the FPC can be designed inthree steps below
(i) Choosing the fuzzy control input-output two inputvariables E and EC belong to [minus025 025] Besidesthree output variables Kpprime Kiprime andKdprime are calibratedover the interval [0 1] as follows [24]
Kpprime
Kp minusKpmin
Kpmax minusKpmin
Kiprime
Ki minusKimin
Kimax minusKimin
Kdprime
Kd minusKdmin
Kdmax minusKdmin
(6)
Hence the input values in equation (5) are re-spectively Kp 2400Kpprime + 100 Ki 99Kiprime + 1 andKd 99Kdprime + 01e linguistic variables of two inputs are defined bythe positive big (PB) positive small (PS) zero (ZO)negative small (NS) and negative big (NB) Besidesthe linguistic variables of three outputs are alsodefined as small (S) medium small (MS) medium(M) medium big (MB) and big (B) respectively
(ii) Membership function the shape of membershipfunctions of input-output variables is used by thetriangular function and its degree of membership isbetween 0 and 1 as shown in Figure 5(b)
(iii) e FISrsquos rules the initial control rules are given bythe designerrsquos knowledge and experience as follows
(1) If E is NB and EC is NB then Kpprime is MS Kiprime is Sand Kdprime is S
(2) If E is NB and EC is NS then Kpprime isM Kiprime is MSand Kdprime is S
(25) If E is PB and EC is PB then Kpprime is B Kiprime is MBand Kdprime is MB
where FIS is selected by the minimum function andthe centroid method of Mamdani and Assilian [25]and the above control rules are then optimized byGA program through the subsystem model
32 Optimization of the Control Rules Based on theGA Program
321 GA Program GA is an optimization method based onprinciples of natural selection It seeks the maximum or theminimum values of one or more objective functions usingcomputational techniques motivated by biological re-production erefore GA is defined as finding a vector ofdecisive variables that satisfies constraints to give acceptablevalues to all objective functions [26 27] and it can be writtenas follows
6 Shock and Vibration
Find the vector x [x1 x2 xn]T to optimize
F(x) f1(x) f2(x) fn(x)[ ]Tsubject togi(x)le 0 i 1 2 p
hj(x) 0 j 1 2 q
(7)
where F(x) is the vector of objective functions which mustbe either maximized or minimized and p and q are numbersof inequality constraints and equality constraints
GA is structured into the following steps encodingpopulation initialization tness evaluation parent selectiongenetic operations (crossover and mutate) and terminationcriterione ow chart of the GA program for SHM is builtin Figure 6
322 Application of GA Program to Optimize the ControlRules e goal main of GA is to seek the optimal controlrules in FIS to get the minimum values of the weighted RMSacceleration responses of the vertical driverrsquos seat cabrsquospitch and roll vibrations via the subsystem model inFigure 5(a) erefore GArsquos structure is built as follows
(i) Encoding mechanism and initial population in ldquo(iii)e FISrsquos rulesrdquo there are 25 control rules thatcontain a total of 75 elements e 75 elements arethen connected into a string of numbers as achromosome which is regarded as a vectorEncoding mechanism can shorten the chromosomelength of the individuals in population space toenhance the running speed and to reduce thesearching space of the algorithm program us thelinguistic variables of two inputs (E and EC) areencoded by the numbers as [NB NS ZO PS PB][0 1 2 3 4] [aj]1times5 and the linguistic variables ofthree outputs (Kpprime Kiprime andKdprime) are encoded by thenumbers as [S MS M MB B] [5 6 7 8 9] [bj]1times5 Besides the individuals in the initial pop-ulation are randomly generated For each gene thevalue of that gene is also selected as a randompositive integer in the range of 0le ajle 4 and5le bjle 9 and the size of the initial population is 100
(ii) Objective function and tness value the minimumvalues of the weighted RMS acceleration responses(awl) of the vertical driverrsquos seat cabrsquos pitch and rollvibrations are selected as objective functions in this
study e expression of objective functions iswritten in equation (9) In order to nd the mini-mum values of the weighted RMS acceleration re-sponses the tness value J is greatly simplied tocalculate objective functions as follows [20 27]
J 1
sum αla2wl (8)
where subscript l refers to the vertical driverrsquos seat(zs) cabrsquos pitch (ϕc) or cabrsquos roll (θc) vibrations andαl is the scalar that weighted or percent of theweighted RMS values in le individuals with the higher tness value Jwhichis obtained via the subsystem model show that theobtained control rules in ldquo(iii) e FISrsquos rulesrdquo arebetter erefore the resultant individuals areupdated before the evolution process ends and theoptimal individuals can be obtained
(iii) Genetic operations after establishing the initialpopulation and selecting the parents Genetic oper-ations (including crossover and mutation) are thenperformed Herein crossover probability of 095 andmutation probability of 005 have been used in 200
Subsystem ofvibratory roller
SHM withRM damper
Fuzzy
FIS
GA(J)Off-road terrain
EECfd
u(Desired)
awzsawϕcawθc
PID control
(Kpprime Ki
prime Kdprime)
(a)
Kprime
p
Kprime
i
Kprime
d
Control rules(Mamdani)
E
EC
(b)
Figure 5 Structure of the vehicle model with SHM (a) Optimal fuzzy-PID control model (b) FLC control
Yes
No
Initialize population
Select parents
Update FIS and simulatethe Simulink system
Evolutionalnumber of times
End
Initialize parents and establish FIS
Start
Crossover
Mutation
Gen
etic
ope
ratio
ns
Selection
Evaluate the fitnessvalues of individuals
Output the control rulecode and fitness curve
Acceptance function
Figure 6 e ow chart of the GA program for SHM
Shock and Vibration 7
generations erefore the arithmetic crossover isperformed on 95 of the selected parents wherebytwo children are created from the weighted sum oftwo parents and children of the remaining 5 ofselected parents are exact copies of the parentsCrossover operation is performed until the pop-ulation number is doubled en each individualundergoes the mutation operation which is theprocess of randomly changing the values of genes in achromosomewith a probability of 005emutationcan create new genetic material into an existingindividual and add diversity to the genetic charac-teristics of the population Finally through the fitnessvalue J only the optimal individuals are selected atthe end of each generation to exist as the populationof the next generation For the termination criterionthe limitary generation is used then the resultantpopulation is evaluated to determine convergence
323 Optimal Result of the Control Rules In order to seekthe optimal control rules for the FPC we assume that thevibratory roller travels on the deformable terrain at a constantspeed v0 167mmiddotsminus1 and off-road terrain excitation input q(t)of the subsystem model is chosen as in Figure 3(a) with thesimulation time of 10 se scalar that weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibrations areαz 0486 αϕ 0449 and αθ 0065 respectively which aredecided based on the percent of the weighted RMS value of thevertical driverrsquos seat (486) cabrsquos pitch (449) and cabrsquos rollvibrations (65) with the weighted RMS values of the PHM inTable 1 e maximum generation is 200
e result in Figure 7 shows that the maximum fitnessvalue J is obtained from the evolutionary generation of 133to the end erefore the optimal individuals can be ob-tained at the generation of 133 By recording the optimalcontrol rules in FIS are listed in Table 2 e optimal controlrules are then used for the optimal FPC to simulate andanalyze the low-frequency performance of semi-active cabrsquoshydraulic mounts
4 Results and Discussion
41 Evaluation Criteria e performance of the vehiclesuspension system is evaluated by three main indices in thetime domain including the ride comfort working space androad holding characteristics
Among these three indices the ride comfort perfor-mance evaluated via the weighted RMS acceleration re-sponse is considered to be the most important index [1] Inaddition in the international standard ISO 2631-1 [12] thePSD acceleration response is also applied to estimate theeffect of vibration on the endurance limit of the human bodyin the frequency domain It was suggested that a low-frequency range of 4ndash10Hz for the vertical and of 05ndash2Hz for the rotational vibrations seriously affected thedriverrsquos health and safety In this study the performance ofSHM also is evaluated through both the PSD and theweighted RMS acceleration responses of the vertical driverrsquos
seat cabrsquos pitch and roll vibrations in the frequency andtime domains us the smaller PSD and weighted RMSvalues mean to be the better ability of the correspondingisolation mounts e expression of RMS was given by
awl
1T
1113946T
0euroxl(t)1113858 1113859
2dt
1113971
(9)
where euroxl(t) is the acceleration response in the l as a functionof time and T 50 s is the time of simulation
42 Control Performance When the Vehicle Travels on theDeformableTerrain In this study the vehicle is assumed to betraveling on a terrain type of Grenville loam given by Wong[28] at a constant speed v0 167mmiddotsminus1 e Grenville loamrsquosparameters including n 101 kc 006times103Nmiddotmminus(n+1)kφ 5880times103Nmiddotmminus(n+2) c 31times 103 Pa φ 298deg and itsoff-road terrain irregularity as in Figures 3(a) are the randomexcitation inputs of the simulatingmodel Simulations are thencarried out to analyze the low-frequency performance of SHMbased on the design parameters of a single drum vibratoryroller [1]
A good cabrsquos isolation system should be able to minimizeits deflection and acceleration to enhance the driverrsquos ridecomfort In addition the driverrsquos mental and physical healthis affected not only by the acceleration responses in the timeregion but also by the PSD acceleration responses in the low-frequency region [11]erefore the maximum PSD and theweighted RMS values of the vertical driverrsquos seat cab pitchand roll vibrations are respectively given to compare thelow-frequency performance of SHM
e simulation results of the PSD acceleration responsesof the vertical driverrsquos seat cabrsquos pitch and roll vibrations areplotted in Figures 8(a)ndash8(c) respectively In Figure 8 theresonance frequencies of PSD acceleration responses of thevertical driverrsquos seat cabrsquos pitch and roll vibrations withSHM without optimization and with optimization have notbeen changed in comparison with PHM is can be due tothe fact that stiffness coefficients of the cabrsquos isolation systemare unchanged and its damping control forces have almostno effect on the resonance frequencies However themaximum resonance peaks of the PSD acceleration re-sponses are significantly transformed by the SHM
e maximum resonance peaks of the PSD accelerationresponses of the vertical driverrsquos seat cabrsquos pitch and rollvibrations of SHM without optimization are smaller thanPHM Meanwhile the maximum resonance peaks of the PSDacceleration responses of SHM with optimization are thesmallest Especially in low-frequency below 4Hz the maxi-mum PSD values of the vertical driverrsquos seat cabrsquos pitch androll vibrations of SHM with optimization are greatly reducedby 3297 2908 and 6440 in comparison with PHMrespectively is is due to the main impact of the semi-activedamping force of hydraulic mount fd ch| _z| _z + u ere-fore the health of the driver can be clearly improved by SHMusing the optimal fuzzy-PID controller
e simulation results of the acceleration responses arealso shown in Figures 9(a)ndash9(c) In Figure 9 we can see that
8 Shock and Vibration
the acceleration responses of SHM with optimization arelower than both PHM and SHM without optimizationBesides the weighted RMS acceleration responses in Table 1also show that the weighted RMS values of the verticaldriverrsquos seat cabrsquos pitch and roll vibrations of SHM withoptimization are strongly reduced by 3499 4256 and4172 in comparison with PHM respectively e aboveanalysis results indicate that when the vehicle travels on thedeformable terrain the driverrsquos ride comfort can be clearlyimproved by SHM with optimization in both the time andthe low-frequency region erefore the SHM with opti-mization could provide the best ride comfort performancefor the off-road vibratory roller in the condition of thevehicle traveling
43 Control Performance When the Vehicle Moves andCompacts on the Elastoplastic Soil Ground In the workingcondition of the vibratory roller the effect of the elastoplasticsoil grounds on the performance of the compaction processwas studied under the excitation frequencies of the drum in arange of 01ndash70Hz [2ndash4 9] the research results showed thatcomprehensive drumsoil contact and loss of contact data
had appeared over a range of 15ndash40Hz [4] especially at theexcitation frequencies of 285Hz and 33Hz of the drumwhich yielded the maximum compaction forces due toldquodouble-jumprdquo of the drum [2 9] Based on the designparameters of a single drum vibratory roller [1] the exci-tation frequency of the vibratory drum in the workingcondition was also given at 28 and 35Hz therefore theexcitation frequencies of the vibratory drum at 28 and 35Hzwith the parameters of the vehicle [1] are used for simulationBesides in compression process of the drum the elastoplasticsoil properties are changed during the interaction between therigid drum and soil ground e elastoplastic soil propertiesare represented via three different values of the plasticityparameter ε including low-density soil ε 034 medium-density soil ε 072 and high-density soil ε 087 [9]However the elastoplastic property of low-density soil(ε 034) is similar to the property of a soft soil deformationwhich is simulated in the condition of the vehicle travelingerefore in order to evaluate the low-frequency perfor-mance of SHM in the condition of the vehicle working thevehicle is moved and compacted at very slow speed 083mmiddotsminus1under a lowhigh excitation frequency 2835Hz of the vi-bratory drum on a high elastoplastic soil ground e
50 100 150 2001
15
2
25
3X 133Y 2579
Evolutionary generations
J
Figure 7 e curve of fitness value
Table 1 e weighted RMS acceleration responses on a deformable terrain
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 1063 0875 0691 3499awϕc (radmiddotsminus2) 0982 0810 0564 4256awθc (radmiddotsminus2) 0139 0100 0081 4172
Table 2 Result of the optimal control rules
ECE
Kpprime Kiprime Kdprime
NB NS ZO PS PB NB NS ZO PS PB NB NS ZO PS PB
NB M MB B MS S S S M MB S S M B MB BNS MB M MS M MS S B MB MS M MS S M M SZO M S S S M MS MS S M MB M B S S MSPS MS M MS M B MS S M MB S MB MS S MS MSPB S MS M MB MB M M MS S S MS B S S M
Shock and Vibration 9
PHMSHM without optimizationSHM with optimization
05 1 2 4 8 16 32 640
02
04
06
08
Frequency (Hz)
Vert
ical
acce
lera
tion
PSD
(m2 middotsndash3
)X 209Y 0558
X 209Y 0374
ndash3297
(a)
PHMSHM without optimizationSHM with optimization
0
02
04
06
X 209Y 0361
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 209Y 0256
ndash2908
05 1 2 4 8 16 32 64Frequency (Hz)
(b)
PHMSHM without optimizationSHM with optimization
0
01
X 259Y 0059
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3)
X 259Y 0021
ndash6440
05 1 2 4 8 16 32 64Frequency (Hz)
(c)
Figure 8 Results of the PSD acceleration responses on the deformable terrain (a) Vertical driverrsquos seat (b) Cabrsquos pitch angle (c) Cabrsquos rollangle
PHMSHM without optimizationSHM with optimization
45 46 47 48 49 50ndash4
ndash2
0
2
4
Time (s)
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
(a)
PHMSHM without optimizationSHM with optimization
ndash4
ndash2
0
2
4
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
45 46 47 48 49 50Time (s)
(b)
Figure 9 Continued
10 Shock and Vibration
PHMSHM without optimizationSHM with optimization
ndash03
ndash02
ndash01
0
01
02
03
Roll
acce
lera
tion
(rad
middotsndash2)
45 46 47 48 49 50Time (s)
(c)
Figure 9 Results of the acceleration responses on the deformable terrain (a) Vertical driverrsquos seat (b) Cabrsquos pitch angle (c) Cabrsquos roll angle
05 1 2 4 8 16 32 640
01
02
03
04
X 569Y 0074
Frequency (Hz)
Vert
ical
acce
lera
tion
PSD
(m2 middotsndash3
)
X 2818Y 0014
X 209Y 0376 ndash2446
PHMSHM without optimizationSHM with optimization
X 209Y 0284
(a)
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
X 2818Y 0033
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 569Y 0045
X 209Y 0197
X 209Y 0135
ndash3147
PHMSHM without optimizationSHM with optimization
(b)
05 1 2 4 8 16 32 64Frequency (Hz)
0
001
002
003
004
X 2818Y 0008
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3) X 249
Y 0032
X 269Y 0013 X 569
Y 0011
ndash5937
PHMSHM without optimizationSHM with optimization
(c)
Figure 10 Results of the PSD acceleration responses under a low excitation frequency 28Hz of the drum (a) Vertical driverrsquos seat (b)Cabrsquos pitch angle (c) Cabrsquos roll angle
Shock and Vibration 11
parameters of the high elastoplastic soil ground includesε 087 ksp 283times106Nmiddotmminus1 kse 423times106Nmiddotmminus1 andcse 371times 103Nsmiddotmminus1
e comparison results of the PSD acceleration responsesof the vertical driverrsquos seat cabrsquos pitch and roll vibrations withthe cabrsquos isolation systems at a lowhigh excitation frequency2835Hz of the vibratory drum are seen in Figures 10 and 11Similarly in the condition of the vehicle traveling the res-onance frequencies of PSD acceleration responses of thevertical driverrsquos seat cabrsquos pitch and roll vibrations of SHMwithout optimization and SHM with optimization are alsounchanged in comparison with PHM e simulation resultsalso show that the resonance frequencies of SHM withoutoptimization and SHMwith optimization also occur at 28183518Hz comparable with PHM in all three directions iscan be due to the effect of the resonance at a lowhigh ex-citation frequency 2835Hz of the vibratory drum In ad-dition the resonance frequency of the acceleration PSDresponses of all cabrsquos isolation systems clearly appears at569Hz in both graphs of Figures 10 and 11 whereas thisresonance frequency does not occur in the graph of Figure 8
is particularity may be due to the effect of the soil stiffnesswith the high-density soil ground
Besides at a low-frequency range below 4Hz themaximum resonance peaks of the PSD acceleration re-sponses of the vertical driverrsquos seat cabrsquos pitch and rollvibrations of SHMwith optimization are strongly reduced incomparison with PHM by 2446 3147 and 5937 at alow excitation frequency 28Hz of the drum and by 17763352 and 5385 at a high excitation frequency 35Hz ofthe drum respectively is is also due to the main impact ofthe semi-active damping force of hydraulic mountfd ch| _z| _z + u Contrarily at a frequency range upper 4Hzthe PSD acceleration responses of the vertical driverrsquos seatcabrsquos pitch and roll vibrations of SHMwithout optimizationand SHM with optimization are slightly increased incomparison with PHM especially at the resonance fre-quency of 569Hz However the PSD acceleration values arevery small erefore the driverrsquos health can be clearlyimproved by using SHM with optimization in the low-frequency region when the vehicle moves and compactson an elastoplastic soil ground
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
03
04Ve
rtic
al ac
cele
ratio
n PS
D (m
2 middotsndash3)
X 3518Y 00018
X 569Y 0031
X 209Y 0321
X 209Y 0264
ndash1776
PHMSHM without optimizationSHM with optimization
(a)
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 3518Y 0015
X 569Y 0019
X 209Y 0182
X 209Y 0121
ndash3352
PHMSHM without optimizationSHM with optimization
(b)
05 1 2 4 8 16 32 64Frequency (Hz)
0
001
002
003
004
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3)
X 569Y 0004
X 249Y 0026
X 3518Y 00035
X 269Y 0012
ndash5385
PHMSHM without optimizationSHM with optimization
(c)
Figure 11 Results of the PSD acceleration responses under a high excitation frequency 35Hz of the drum (a) Vertical driverrsquos seat (b)Cabrsquos pitch angle (c) Cabrsquos roll angle
12 Shock and Vibration
45 46 47 48 49 50ndash2
ndash1
0
1
2
Time (s)
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(a)
45 46 47 48 49 50Time (s)
ndash1
ndash05
0
05
1
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(b)
45 46 47 48 49 50Time (s)
ndash01
ndash005
0
005
01
Roll
acce
lera
tion
(rad
middotsndash2)
PHMSHM without optimizationSHM with optimization
(c)
Figure 12 Results of the acceleration responses under a low excitation frequency 28Hz of the drum (a) Vertical driverrsquos seat (b) Cabrsquospitch angle (c) Cabrsquos roll angle
45 46 47 48 49 50Time (s)
ndash2
ndash1
0
1
2
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(a)
45 46 47 48 49 50Time (s)
ndash1
ndash05
0
05
1
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(b)
Figure 13 Continued
Shock and Vibration 13
e simulation results in Figures 12 and 13 also showthat the acceleration responses of the vertical driverrsquos seatcabrsquos pitch and roll vibrations of SHM with optimizationare lower than both PHM and SHM without optimizationBesides the values of the weighted RMS accelerationresponses are also listed in Tables 3 and 4 e weightedRMS values of the vertical driverrsquos seat cabrsquos pitch androll vibrations of SHM with optimization are greatly re-duced in comparison with SHM by 3516 4829 and3765 under a low excitation frequency 28 Hz of thedrum and by 2480 4315 and 3606 under a highexcitation frequency 35 Hz of the drum respectivelyConsequently the above analysis results also indicate thatthe driverrsquos ride comfort and health are strongly improvedby SHM with optimization when the vehicle moves andcompacts on the high elastoplastic soil ground under boththe lowhigh excitation frequency 2835 Hz of the vi-bratory drum
5 Conclusions
Modeling and low-frequency performance analysis of semi-active cabrsquos hydraulic mounts of the off-road vibratory rollerare addressed in this work e comparison between thesimulation and test results of passive cabrsquos isolation mounts
is also carried out e low-frequency performance of SHMusing the optimal fuzzy-PID controller is then evaluatedthrough the PSD acceleration and weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibrations inboth the frequency and time domains e results aresummarized as follows
(1) In the condition of the vehicle traveling the weightedRMS acceleration responses and the PSD accelera-tion responses of the vertical driverrsquos seat cabrsquos pitchand roll vibrations of SHM with optimization arelower than both PHM and SHM without optimi-zation Particularly the weighted RMS values ofSHM with optimization are strongly reduced incomparison with PHM by 3499 4256 and4172 respectively
(2) In condition of the vehicle working both PSD ac-celeration responses and the weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibra-tions of SHM using the optimal fuzzy-PID controllerare clearly smaller comparable with both PHM andSHM without optimization under both lowhighexcitation frequency 2835Hz of the drum on thehigh elastoplastic soil ground Especially the maxi-mum PSD values of the vertical driverrsquos seat cabrsquos
45 46 47 48 49 50Time (s)
ndash01
ndash005
0
005
01
Roll
acce
lera
tion
(rad
middotsndash2)
PHMSHM without optimizationSHM with optimization
(c)
Figure 13 Results of the acceleration responses under a high excitation frequency 35Hz of the drum (a) Vertical driverrsquos seat (b) Cabrsquospitch angle (c) Cabrsquos roll angle
Table 3 e weighted RMS values under a low excitation frequency 28Hz of the drum
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 0657 0501 0426 3516awϕc (radmiddotsminus2) 0323 0184 0167 4829awθc (radmiddotsminus2) 0085 0056 0053 3765
Table 4 e weighted RMS values under a high excitation frequency 35Hz of the drum
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 0512 0453 0385 2480awϕc (radmiddotsminus2) 0241 0162 0137 4315awθc (radmiddotsminus2) 0061 0040 0039 3606
14 Shock and Vibration
pitch and roll vibrations of SHM with optimizationare strongly reduced by 2446 3147 and 5937in comparison with PHM when the vehicle compactsat a low excitation frequency 28Hz of the drum
(3) e above analysis results indicate that the low-frequency and high-stiffness characteristics of SHMusing the optimal fuzzy-PID controller have the besteffect on isolating low-frequency vibration trans-mitted and controlling the cab shaking under variousoperating conditions of the off-road vibratory roller
Data Availability
e data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] V Liem J Zhang V Quynh and R Jiao ldquoVibration analysisand modeling of an off-road vibratory roller equipped withthree different cabrsquos isolation mountsrdquo Shock and Vibrationvol 2018 Article ID 8527574 17 pages 2018
[2] D Adam and F Kopf ldquoeoretical analysis of dynamicallyloaded soilsrdquo in Proceedings of the European WorkshopCompaction of Soils and Granular Materials pp 207ndash217Paris France 2000
[3] J Li Z Zhang H Xu and Z Feng ldquoDynamic characteristicsof the vibratory roller test-bed vibration isolation systemsimulation and experimentrdquo Journal of Terramechanicsvol 56 pp 139ndash156 2014
[4] J Paul and A Michael ldquoCapturing nonlinear vibratory rollercompactor behavior through lumped parameter modelingrdquoJournal of Engineering Mechanics vol 134 no 8 pp 684ndash6932008
[5] X Zhang Modelling simulation and optimization of ridecomfort for off road articulated dump trucks PhD thesisSoutheast University Nanjing China 2010
[6] A Pakowski and D Cao ldquoEffect of soil deformability on off-road vehicle ride dynamicsrdquo SAE International Journal ofCommercial Vehicles vol 6 no 2 pp 362ndash371 2013
[7] R A Irani R J Bauer and A Warkentin ldquoDynamic wheel-soil model for lightweight mobile robots with smooth wheelsrdquoJournal of Intelligent amp Robotic Systems vol 71 no 2pp 179ndash193 2013
[8] S Park A A Popov and D J Cole ldquoInfluence of soil de-formation on off-road heavy vehicle suspension vibrationrdquoJournal of Terramechanics vol 41 no 1 pp 41ndash68 2004
[9] A Kordestani S Rakheja P Marcotte A Pazooki andD Juras ldquoAnalysis of ride vibration environment of soilcompactorsrdquo SAE International Journal of Commercial Ve-hicles vol 3 no 1 pp 259ndash272 2010
[10] V Quynh Vibration study and control for cab of vibratoryroller PhD thesis Southeast University Nanjing China2013
[11] M Griffin Handbook of Human Vibration Academic PressLondon UK 1990
[12] International Organization for Standardization ldquoMechanicalvibration and shock-evaluation of human exposure to wholebody vibration-part 2 general requirementsrdquo Tech Rep ISO2631-11997 ISO Geneva Switzerland 1997
[13] S Yildirim ldquoVibration control of suspension systems using aproposed neural networkrdquo Journal of Sound and Vibrationvol 277 no 4-5 pp 1059ndash1069 2004
[14] N Ebrahimi and A Gharaveisi ldquoOptimal fuzzy supervisorcontroller for an active suspension systemrdquo InternationalJournal of Soft Computing amp Engineering vol 2 no 4pp 36ndash39 2012
[15] Z Xie P Wong J Zhao T Xu and I Wong ldquoA noise-insensitive semi-active air suspension for heavy-duty vehicleswith an integrated fuzzy-wheelbase preview controlrdquo Math-ematical Problem in Engineering vol 2013 Article ID 12195312 pages 2013
[16] B Kasemi A G A Muthalif M M Rashid and S FathimaldquoFuzzy-PID controller for semi-active vibration control usingmagnetorheological fluid damperrdquo Procedia Engineeringvol 41 pp 1221ndash1227 2012
[17] T Nguyen A novel semi-active magnetorheological mount forvibration isolation PhD thesis e University of ToledoToledo OH USA 2009
[18] A Muthalif B Kasemi D Nordin and M Rashid ldquoSemi-active vibration control using experimental model of Mag-netorheological damper with adaptive fuzzy-PID controllerrdquoSmart Structures and Systems vol 20 no 1 pp 85ndash97 2017
[19] S D Nguyen Q H Nguyen and S-B Choi ldquoA hybridclustering based fuzzy structure for vibration control-part 2an application to semi-active vehicle seat-suspension systemrdquoMechanical Systems and Signal Processing vol 56-57pp 288ndash301 2015
[20] W Wang Y Song Y Xue H Jin J Hou and M Zhao ldquoAnoptimal vibration control strategy for a vehiclersquos active sus-pension based on improved cultural algorithmrdquo Applied SoftComputing vol 28 pp 167ndash174 2015
[21] Y Chen Z Wang J Qiu and Z Huang ldquoHybrid fuzzyskyhook surface control using multi-objective microgeneticalgorithm for semi-active vehicle suspension system ridecomfort stability analysisrdquo Journal of Dynamic SystemsMeasurement amp Control vol 134 no 4 pp 1ndash14 2012
[22] International Organization for Standardization ldquoReportingvehicle road surface irregularitiesrdquo Tech Rep ISOTC108SC2WG4 N57 ieme Medical Publishers Stuttgart Germany1982
[23] M Mitschke Dynamik der Kraftfahrzeuge Springer-VerlagBerlin Germany 1972
[24] M Rahmat ldquoApplication of selftuning fuzzy PID controlleron industrial hydraulic actuator using system identificationapproachrdquo International Journal on Smart Sensing amp In-telligent Systems vol 2 no 2 pp 246ndash261 2009
[25] E H Mamdani and S Assilian ldquoAn experiment in linguisticsynthesis with a fuzzy logic controllerrdquo International Journalof Man-Machine Studies vol 7 no 1 pp 1ndash13 1975
[26] Z Nariman M Salehpour A Jamali and E HanghgooldquoPareto optimization of a five-degree of freedom vehicle vi-bration model using a MUGArdquo Engineering Applications ofArtificial Intelligence vol 23 no 4 pp 543ndash551 2010
[27] H John G Michael and D Gregory ldquoMulti-objective controloptimization for semi-active vehicle suspensionsrdquo Journal ofSound and Vibration vol 330 pp 5502ndash5516 2011
[28] J Y Wong ldquoData processing methodology in the charac-terization of the mechanical properties of terrainrdquo Journal ofTerramechanics vol 17 no 1 pp 13ndash41 1980
Shock and Vibration 15
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Find the vector x [x1 x2 xn]T to optimize
F(x) f1(x) f2(x) fn(x)[ ]Tsubject togi(x)le 0 i 1 2 p
hj(x) 0 j 1 2 q
(7)
where F(x) is the vector of objective functions which mustbe either maximized or minimized and p and q are numbersof inequality constraints and equality constraints
GA is structured into the following steps encodingpopulation initialization tness evaluation parent selectiongenetic operations (crossover and mutate) and terminationcriterione ow chart of the GA program for SHM is builtin Figure 6
322 Application of GA Program to Optimize the ControlRules e goal main of GA is to seek the optimal controlrules in FIS to get the minimum values of the weighted RMSacceleration responses of the vertical driverrsquos seat cabrsquospitch and roll vibrations via the subsystem model inFigure 5(a) erefore GArsquos structure is built as follows
(i) Encoding mechanism and initial population in ldquo(iii)e FISrsquos rulesrdquo there are 25 control rules thatcontain a total of 75 elements e 75 elements arethen connected into a string of numbers as achromosome which is regarded as a vectorEncoding mechanism can shorten the chromosomelength of the individuals in population space toenhance the running speed and to reduce thesearching space of the algorithm program us thelinguistic variables of two inputs (E and EC) areencoded by the numbers as [NB NS ZO PS PB][0 1 2 3 4] [aj]1times5 and the linguistic variables ofthree outputs (Kpprime Kiprime andKdprime) are encoded by thenumbers as [S MS M MB B] [5 6 7 8 9] [bj]1times5 Besides the individuals in the initial pop-ulation are randomly generated For each gene thevalue of that gene is also selected as a randompositive integer in the range of 0le ajle 4 and5le bjle 9 and the size of the initial population is 100
(ii) Objective function and tness value the minimumvalues of the weighted RMS acceleration responses(awl) of the vertical driverrsquos seat cabrsquos pitch and rollvibrations are selected as objective functions in this
study e expression of objective functions iswritten in equation (9) In order to nd the mini-mum values of the weighted RMS acceleration re-sponses the tness value J is greatly simplied tocalculate objective functions as follows [20 27]
J 1
sum αla2wl (8)
where subscript l refers to the vertical driverrsquos seat(zs) cabrsquos pitch (ϕc) or cabrsquos roll (θc) vibrations andαl is the scalar that weighted or percent of theweighted RMS values in le individuals with the higher tness value Jwhichis obtained via the subsystem model show that theobtained control rules in ldquo(iii) e FISrsquos rulesrdquo arebetter erefore the resultant individuals areupdated before the evolution process ends and theoptimal individuals can be obtained
(iii) Genetic operations after establishing the initialpopulation and selecting the parents Genetic oper-ations (including crossover and mutation) are thenperformed Herein crossover probability of 095 andmutation probability of 005 have been used in 200
Subsystem ofvibratory roller
SHM withRM damper
Fuzzy
FIS
GA(J)Off-road terrain
EECfd
u(Desired)
awzsawϕcawθc
PID control
(Kpprime Ki
prime Kdprime)
(a)
Kprime
p
Kprime
i
Kprime
d
Control rules(Mamdani)
E
EC
(b)
Figure 5 Structure of the vehicle model with SHM (a) Optimal fuzzy-PID control model (b) FLC control
Yes
No
Initialize population
Select parents
Update FIS and simulatethe Simulink system
Evolutionalnumber of times
End
Initialize parents and establish FIS
Start
Crossover
Mutation
Gen
etic
ope
ratio
ns
Selection
Evaluate the fitnessvalues of individuals
Output the control rulecode and fitness curve
Acceptance function
Figure 6 e ow chart of the GA program for SHM
Shock and Vibration 7
generations erefore the arithmetic crossover isperformed on 95 of the selected parents wherebytwo children are created from the weighted sum oftwo parents and children of the remaining 5 ofselected parents are exact copies of the parentsCrossover operation is performed until the pop-ulation number is doubled en each individualundergoes the mutation operation which is theprocess of randomly changing the values of genes in achromosomewith a probability of 005emutationcan create new genetic material into an existingindividual and add diversity to the genetic charac-teristics of the population Finally through the fitnessvalue J only the optimal individuals are selected atthe end of each generation to exist as the populationof the next generation For the termination criterionthe limitary generation is used then the resultantpopulation is evaluated to determine convergence
323 Optimal Result of the Control Rules In order to seekthe optimal control rules for the FPC we assume that thevibratory roller travels on the deformable terrain at a constantspeed v0 167mmiddotsminus1 and off-road terrain excitation input q(t)of the subsystem model is chosen as in Figure 3(a) with thesimulation time of 10 se scalar that weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibrations areαz 0486 αϕ 0449 and αθ 0065 respectively which aredecided based on the percent of the weighted RMS value of thevertical driverrsquos seat (486) cabrsquos pitch (449) and cabrsquos rollvibrations (65) with the weighted RMS values of the PHM inTable 1 e maximum generation is 200
e result in Figure 7 shows that the maximum fitnessvalue J is obtained from the evolutionary generation of 133to the end erefore the optimal individuals can be ob-tained at the generation of 133 By recording the optimalcontrol rules in FIS are listed in Table 2 e optimal controlrules are then used for the optimal FPC to simulate andanalyze the low-frequency performance of semi-active cabrsquoshydraulic mounts
4 Results and Discussion
41 Evaluation Criteria e performance of the vehiclesuspension system is evaluated by three main indices in thetime domain including the ride comfort working space androad holding characteristics
Among these three indices the ride comfort perfor-mance evaluated via the weighted RMS acceleration re-sponse is considered to be the most important index [1] Inaddition in the international standard ISO 2631-1 [12] thePSD acceleration response is also applied to estimate theeffect of vibration on the endurance limit of the human bodyin the frequency domain It was suggested that a low-frequency range of 4ndash10Hz for the vertical and of 05ndash2Hz for the rotational vibrations seriously affected thedriverrsquos health and safety In this study the performance ofSHM also is evaluated through both the PSD and theweighted RMS acceleration responses of the vertical driverrsquos
seat cabrsquos pitch and roll vibrations in the frequency andtime domains us the smaller PSD and weighted RMSvalues mean to be the better ability of the correspondingisolation mounts e expression of RMS was given by
awl
1T
1113946T
0euroxl(t)1113858 1113859
2dt
1113971
(9)
where euroxl(t) is the acceleration response in the l as a functionof time and T 50 s is the time of simulation
42 Control Performance When the Vehicle Travels on theDeformableTerrain In this study the vehicle is assumed to betraveling on a terrain type of Grenville loam given by Wong[28] at a constant speed v0 167mmiddotsminus1 e Grenville loamrsquosparameters including n 101 kc 006times103Nmiddotmminus(n+1)kφ 5880times103Nmiddotmminus(n+2) c 31times 103 Pa φ 298deg and itsoff-road terrain irregularity as in Figures 3(a) are the randomexcitation inputs of the simulatingmodel Simulations are thencarried out to analyze the low-frequency performance of SHMbased on the design parameters of a single drum vibratoryroller [1]
A good cabrsquos isolation system should be able to minimizeits deflection and acceleration to enhance the driverrsquos ridecomfort In addition the driverrsquos mental and physical healthis affected not only by the acceleration responses in the timeregion but also by the PSD acceleration responses in the low-frequency region [11]erefore the maximum PSD and theweighted RMS values of the vertical driverrsquos seat cab pitchand roll vibrations are respectively given to compare thelow-frequency performance of SHM
e simulation results of the PSD acceleration responsesof the vertical driverrsquos seat cabrsquos pitch and roll vibrations areplotted in Figures 8(a)ndash8(c) respectively In Figure 8 theresonance frequencies of PSD acceleration responses of thevertical driverrsquos seat cabrsquos pitch and roll vibrations withSHM without optimization and with optimization have notbeen changed in comparison with PHM is can be due tothe fact that stiffness coefficients of the cabrsquos isolation systemare unchanged and its damping control forces have almostno effect on the resonance frequencies However themaximum resonance peaks of the PSD acceleration re-sponses are significantly transformed by the SHM
e maximum resonance peaks of the PSD accelerationresponses of the vertical driverrsquos seat cabrsquos pitch and rollvibrations of SHM without optimization are smaller thanPHM Meanwhile the maximum resonance peaks of the PSDacceleration responses of SHM with optimization are thesmallest Especially in low-frequency below 4Hz the maxi-mum PSD values of the vertical driverrsquos seat cabrsquos pitch androll vibrations of SHM with optimization are greatly reducedby 3297 2908 and 6440 in comparison with PHMrespectively is is due to the main impact of the semi-activedamping force of hydraulic mount fd ch| _z| _z + u ere-fore the health of the driver can be clearly improved by SHMusing the optimal fuzzy-PID controller
e simulation results of the acceleration responses arealso shown in Figures 9(a)ndash9(c) In Figure 9 we can see that
8 Shock and Vibration
the acceleration responses of SHM with optimization arelower than both PHM and SHM without optimizationBesides the weighted RMS acceleration responses in Table 1also show that the weighted RMS values of the verticaldriverrsquos seat cabrsquos pitch and roll vibrations of SHM withoptimization are strongly reduced by 3499 4256 and4172 in comparison with PHM respectively e aboveanalysis results indicate that when the vehicle travels on thedeformable terrain the driverrsquos ride comfort can be clearlyimproved by SHM with optimization in both the time andthe low-frequency region erefore the SHM with opti-mization could provide the best ride comfort performancefor the off-road vibratory roller in the condition of thevehicle traveling
43 Control Performance When the Vehicle Moves andCompacts on the Elastoplastic Soil Ground In the workingcondition of the vibratory roller the effect of the elastoplasticsoil grounds on the performance of the compaction processwas studied under the excitation frequencies of the drum in arange of 01ndash70Hz [2ndash4 9] the research results showed thatcomprehensive drumsoil contact and loss of contact data
had appeared over a range of 15ndash40Hz [4] especially at theexcitation frequencies of 285Hz and 33Hz of the drumwhich yielded the maximum compaction forces due toldquodouble-jumprdquo of the drum [2 9] Based on the designparameters of a single drum vibratory roller [1] the exci-tation frequency of the vibratory drum in the workingcondition was also given at 28 and 35Hz therefore theexcitation frequencies of the vibratory drum at 28 and 35Hzwith the parameters of the vehicle [1] are used for simulationBesides in compression process of the drum the elastoplasticsoil properties are changed during the interaction between therigid drum and soil ground e elastoplastic soil propertiesare represented via three different values of the plasticityparameter ε including low-density soil ε 034 medium-density soil ε 072 and high-density soil ε 087 [9]However the elastoplastic property of low-density soil(ε 034) is similar to the property of a soft soil deformationwhich is simulated in the condition of the vehicle travelingerefore in order to evaluate the low-frequency perfor-mance of SHM in the condition of the vehicle working thevehicle is moved and compacted at very slow speed 083mmiddotsminus1under a lowhigh excitation frequency 2835Hz of the vi-bratory drum on a high elastoplastic soil ground e
50 100 150 2001
15
2
25
3X 133Y 2579
Evolutionary generations
J
Figure 7 e curve of fitness value
Table 1 e weighted RMS acceleration responses on a deformable terrain
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 1063 0875 0691 3499awϕc (radmiddotsminus2) 0982 0810 0564 4256awθc (radmiddotsminus2) 0139 0100 0081 4172
Table 2 Result of the optimal control rules
ECE
Kpprime Kiprime Kdprime
NB NS ZO PS PB NB NS ZO PS PB NB NS ZO PS PB
NB M MB B MS S S S M MB S S M B MB BNS MB M MS M MS S B MB MS M MS S M M SZO M S S S M MS MS S M MB M B S S MSPS MS M MS M B MS S M MB S MB MS S MS MSPB S MS M MB MB M M MS S S MS B S S M
Shock and Vibration 9
PHMSHM without optimizationSHM with optimization
05 1 2 4 8 16 32 640
02
04
06
08
Frequency (Hz)
Vert
ical
acce
lera
tion
PSD
(m2 middotsndash3
)X 209Y 0558
X 209Y 0374
ndash3297
(a)
PHMSHM without optimizationSHM with optimization
0
02
04
06
X 209Y 0361
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 209Y 0256
ndash2908
05 1 2 4 8 16 32 64Frequency (Hz)
(b)
PHMSHM without optimizationSHM with optimization
0
01
X 259Y 0059
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3)
X 259Y 0021
ndash6440
05 1 2 4 8 16 32 64Frequency (Hz)
(c)
Figure 8 Results of the PSD acceleration responses on the deformable terrain (a) Vertical driverrsquos seat (b) Cabrsquos pitch angle (c) Cabrsquos rollangle
PHMSHM without optimizationSHM with optimization
45 46 47 48 49 50ndash4
ndash2
0
2
4
Time (s)
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
(a)
PHMSHM without optimizationSHM with optimization
ndash4
ndash2
0
2
4
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
45 46 47 48 49 50Time (s)
(b)
Figure 9 Continued
10 Shock and Vibration
PHMSHM without optimizationSHM with optimization
ndash03
ndash02
ndash01
0
01
02
03
Roll
acce
lera
tion
(rad
middotsndash2)
45 46 47 48 49 50Time (s)
(c)
Figure 9 Results of the acceleration responses on the deformable terrain (a) Vertical driverrsquos seat (b) Cabrsquos pitch angle (c) Cabrsquos roll angle
05 1 2 4 8 16 32 640
01
02
03
04
X 569Y 0074
Frequency (Hz)
Vert
ical
acce
lera
tion
PSD
(m2 middotsndash3
)
X 2818Y 0014
X 209Y 0376 ndash2446
PHMSHM without optimizationSHM with optimization
X 209Y 0284
(a)
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
X 2818Y 0033
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 569Y 0045
X 209Y 0197
X 209Y 0135
ndash3147
PHMSHM without optimizationSHM with optimization
(b)
05 1 2 4 8 16 32 64Frequency (Hz)
0
001
002
003
004
X 2818Y 0008
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3) X 249
Y 0032
X 269Y 0013 X 569
Y 0011
ndash5937
PHMSHM without optimizationSHM with optimization
(c)
Figure 10 Results of the PSD acceleration responses under a low excitation frequency 28Hz of the drum (a) Vertical driverrsquos seat (b)Cabrsquos pitch angle (c) Cabrsquos roll angle
Shock and Vibration 11
parameters of the high elastoplastic soil ground includesε 087 ksp 283times106Nmiddotmminus1 kse 423times106Nmiddotmminus1 andcse 371times 103Nsmiddotmminus1
e comparison results of the PSD acceleration responsesof the vertical driverrsquos seat cabrsquos pitch and roll vibrations withthe cabrsquos isolation systems at a lowhigh excitation frequency2835Hz of the vibratory drum are seen in Figures 10 and 11Similarly in the condition of the vehicle traveling the res-onance frequencies of PSD acceleration responses of thevertical driverrsquos seat cabrsquos pitch and roll vibrations of SHMwithout optimization and SHM with optimization are alsounchanged in comparison with PHM e simulation resultsalso show that the resonance frequencies of SHM withoutoptimization and SHMwith optimization also occur at 28183518Hz comparable with PHM in all three directions iscan be due to the effect of the resonance at a lowhigh ex-citation frequency 2835Hz of the vibratory drum In ad-dition the resonance frequency of the acceleration PSDresponses of all cabrsquos isolation systems clearly appears at569Hz in both graphs of Figures 10 and 11 whereas thisresonance frequency does not occur in the graph of Figure 8
is particularity may be due to the effect of the soil stiffnesswith the high-density soil ground
Besides at a low-frequency range below 4Hz themaximum resonance peaks of the PSD acceleration re-sponses of the vertical driverrsquos seat cabrsquos pitch and rollvibrations of SHMwith optimization are strongly reduced incomparison with PHM by 2446 3147 and 5937 at alow excitation frequency 28Hz of the drum and by 17763352 and 5385 at a high excitation frequency 35Hz ofthe drum respectively is is also due to the main impact ofthe semi-active damping force of hydraulic mountfd ch| _z| _z + u Contrarily at a frequency range upper 4Hzthe PSD acceleration responses of the vertical driverrsquos seatcabrsquos pitch and roll vibrations of SHMwithout optimizationand SHM with optimization are slightly increased incomparison with PHM especially at the resonance fre-quency of 569Hz However the PSD acceleration values arevery small erefore the driverrsquos health can be clearlyimproved by using SHM with optimization in the low-frequency region when the vehicle moves and compactson an elastoplastic soil ground
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
03
04Ve
rtic
al ac
cele
ratio
n PS
D (m
2 middotsndash3)
X 3518Y 00018
X 569Y 0031
X 209Y 0321
X 209Y 0264
ndash1776
PHMSHM without optimizationSHM with optimization
(a)
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 3518Y 0015
X 569Y 0019
X 209Y 0182
X 209Y 0121
ndash3352
PHMSHM without optimizationSHM with optimization
(b)
05 1 2 4 8 16 32 64Frequency (Hz)
0
001
002
003
004
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3)
X 569Y 0004
X 249Y 0026
X 3518Y 00035
X 269Y 0012
ndash5385
PHMSHM without optimizationSHM with optimization
(c)
Figure 11 Results of the PSD acceleration responses under a high excitation frequency 35Hz of the drum (a) Vertical driverrsquos seat (b)Cabrsquos pitch angle (c) Cabrsquos roll angle
12 Shock and Vibration
45 46 47 48 49 50ndash2
ndash1
0
1
2
Time (s)
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(a)
45 46 47 48 49 50Time (s)
ndash1
ndash05
0
05
1
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(b)
45 46 47 48 49 50Time (s)
ndash01
ndash005
0
005
01
Roll
acce
lera
tion
(rad
middotsndash2)
PHMSHM without optimizationSHM with optimization
(c)
Figure 12 Results of the acceleration responses under a low excitation frequency 28Hz of the drum (a) Vertical driverrsquos seat (b) Cabrsquospitch angle (c) Cabrsquos roll angle
45 46 47 48 49 50Time (s)
ndash2
ndash1
0
1
2
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(a)
45 46 47 48 49 50Time (s)
ndash1
ndash05
0
05
1
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(b)
Figure 13 Continued
Shock and Vibration 13
e simulation results in Figures 12 and 13 also showthat the acceleration responses of the vertical driverrsquos seatcabrsquos pitch and roll vibrations of SHM with optimizationare lower than both PHM and SHM without optimizationBesides the values of the weighted RMS accelerationresponses are also listed in Tables 3 and 4 e weightedRMS values of the vertical driverrsquos seat cabrsquos pitch androll vibrations of SHM with optimization are greatly re-duced in comparison with SHM by 3516 4829 and3765 under a low excitation frequency 28 Hz of thedrum and by 2480 4315 and 3606 under a highexcitation frequency 35 Hz of the drum respectivelyConsequently the above analysis results also indicate thatthe driverrsquos ride comfort and health are strongly improvedby SHM with optimization when the vehicle moves andcompacts on the high elastoplastic soil ground under boththe lowhigh excitation frequency 2835 Hz of the vi-bratory drum
5 Conclusions
Modeling and low-frequency performance analysis of semi-active cabrsquos hydraulic mounts of the off-road vibratory rollerare addressed in this work e comparison between thesimulation and test results of passive cabrsquos isolation mounts
is also carried out e low-frequency performance of SHMusing the optimal fuzzy-PID controller is then evaluatedthrough the PSD acceleration and weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibrations inboth the frequency and time domains e results aresummarized as follows
(1) In the condition of the vehicle traveling the weightedRMS acceleration responses and the PSD accelera-tion responses of the vertical driverrsquos seat cabrsquos pitchand roll vibrations of SHM with optimization arelower than both PHM and SHM without optimi-zation Particularly the weighted RMS values ofSHM with optimization are strongly reduced incomparison with PHM by 3499 4256 and4172 respectively
(2) In condition of the vehicle working both PSD ac-celeration responses and the weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibra-tions of SHM using the optimal fuzzy-PID controllerare clearly smaller comparable with both PHM andSHM without optimization under both lowhighexcitation frequency 2835Hz of the drum on thehigh elastoplastic soil ground Especially the maxi-mum PSD values of the vertical driverrsquos seat cabrsquos
45 46 47 48 49 50Time (s)
ndash01
ndash005
0
005
01
Roll
acce
lera
tion
(rad
middotsndash2)
PHMSHM without optimizationSHM with optimization
(c)
Figure 13 Results of the acceleration responses under a high excitation frequency 35Hz of the drum (a) Vertical driverrsquos seat (b) Cabrsquospitch angle (c) Cabrsquos roll angle
Table 3 e weighted RMS values under a low excitation frequency 28Hz of the drum
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 0657 0501 0426 3516awϕc (radmiddotsminus2) 0323 0184 0167 4829awθc (radmiddotsminus2) 0085 0056 0053 3765
Table 4 e weighted RMS values under a high excitation frequency 35Hz of the drum
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 0512 0453 0385 2480awϕc (radmiddotsminus2) 0241 0162 0137 4315awθc (radmiddotsminus2) 0061 0040 0039 3606
14 Shock and Vibration
pitch and roll vibrations of SHM with optimizationare strongly reduced by 2446 3147 and 5937in comparison with PHM when the vehicle compactsat a low excitation frequency 28Hz of the drum
(3) e above analysis results indicate that the low-frequency and high-stiffness characteristics of SHMusing the optimal fuzzy-PID controller have the besteffect on isolating low-frequency vibration trans-mitted and controlling the cab shaking under variousoperating conditions of the off-road vibratory roller
Data Availability
e data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] V Liem J Zhang V Quynh and R Jiao ldquoVibration analysisand modeling of an off-road vibratory roller equipped withthree different cabrsquos isolation mountsrdquo Shock and Vibrationvol 2018 Article ID 8527574 17 pages 2018
[2] D Adam and F Kopf ldquoeoretical analysis of dynamicallyloaded soilsrdquo in Proceedings of the European WorkshopCompaction of Soils and Granular Materials pp 207ndash217Paris France 2000
[3] J Li Z Zhang H Xu and Z Feng ldquoDynamic characteristicsof the vibratory roller test-bed vibration isolation systemsimulation and experimentrdquo Journal of Terramechanicsvol 56 pp 139ndash156 2014
[4] J Paul and A Michael ldquoCapturing nonlinear vibratory rollercompactor behavior through lumped parameter modelingrdquoJournal of Engineering Mechanics vol 134 no 8 pp 684ndash6932008
[5] X Zhang Modelling simulation and optimization of ridecomfort for off road articulated dump trucks PhD thesisSoutheast University Nanjing China 2010
[6] A Pakowski and D Cao ldquoEffect of soil deformability on off-road vehicle ride dynamicsrdquo SAE International Journal ofCommercial Vehicles vol 6 no 2 pp 362ndash371 2013
[7] R A Irani R J Bauer and A Warkentin ldquoDynamic wheel-soil model for lightweight mobile robots with smooth wheelsrdquoJournal of Intelligent amp Robotic Systems vol 71 no 2pp 179ndash193 2013
[8] S Park A A Popov and D J Cole ldquoInfluence of soil de-formation on off-road heavy vehicle suspension vibrationrdquoJournal of Terramechanics vol 41 no 1 pp 41ndash68 2004
[9] A Kordestani S Rakheja P Marcotte A Pazooki andD Juras ldquoAnalysis of ride vibration environment of soilcompactorsrdquo SAE International Journal of Commercial Ve-hicles vol 3 no 1 pp 259ndash272 2010
[10] V Quynh Vibration study and control for cab of vibratoryroller PhD thesis Southeast University Nanjing China2013
[11] M Griffin Handbook of Human Vibration Academic PressLondon UK 1990
[12] International Organization for Standardization ldquoMechanicalvibration and shock-evaluation of human exposure to wholebody vibration-part 2 general requirementsrdquo Tech Rep ISO2631-11997 ISO Geneva Switzerland 1997
[13] S Yildirim ldquoVibration control of suspension systems using aproposed neural networkrdquo Journal of Sound and Vibrationvol 277 no 4-5 pp 1059ndash1069 2004
[14] N Ebrahimi and A Gharaveisi ldquoOptimal fuzzy supervisorcontroller for an active suspension systemrdquo InternationalJournal of Soft Computing amp Engineering vol 2 no 4pp 36ndash39 2012
[15] Z Xie P Wong J Zhao T Xu and I Wong ldquoA noise-insensitive semi-active air suspension for heavy-duty vehicleswith an integrated fuzzy-wheelbase preview controlrdquo Math-ematical Problem in Engineering vol 2013 Article ID 12195312 pages 2013
[16] B Kasemi A G A Muthalif M M Rashid and S FathimaldquoFuzzy-PID controller for semi-active vibration control usingmagnetorheological fluid damperrdquo Procedia Engineeringvol 41 pp 1221ndash1227 2012
[17] T Nguyen A novel semi-active magnetorheological mount forvibration isolation PhD thesis e University of ToledoToledo OH USA 2009
[18] A Muthalif B Kasemi D Nordin and M Rashid ldquoSemi-active vibration control using experimental model of Mag-netorheological damper with adaptive fuzzy-PID controllerrdquoSmart Structures and Systems vol 20 no 1 pp 85ndash97 2017
[19] S D Nguyen Q H Nguyen and S-B Choi ldquoA hybridclustering based fuzzy structure for vibration control-part 2an application to semi-active vehicle seat-suspension systemrdquoMechanical Systems and Signal Processing vol 56-57pp 288ndash301 2015
[20] W Wang Y Song Y Xue H Jin J Hou and M Zhao ldquoAnoptimal vibration control strategy for a vehiclersquos active sus-pension based on improved cultural algorithmrdquo Applied SoftComputing vol 28 pp 167ndash174 2015
[21] Y Chen Z Wang J Qiu and Z Huang ldquoHybrid fuzzyskyhook surface control using multi-objective microgeneticalgorithm for semi-active vehicle suspension system ridecomfort stability analysisrdquo Journal of Dynamic SystemsMeasurement amp Control vol 134 no 4 pp 1ndash14 2012
[22] International Organization for Standardization ldquoReportingvehicle road surface irregularitiesrdquo Tech Rep ISOTC108SC2WG4 N57 ieme Medical Publishers Stuttgart Germany1982
[23] M Mitschke Dynamik der Kraftfahrzeuge Springer-VerlagBerlin Germany 1972
[24] M Rahmat ldquoApplication of selftuning fuzzy PID controlleron industrial hydraulic actuator using system identificationapproachrdquo International Journal on Smart Sensing amp In-telligent Systems vol 2 no 2 pp 246ndash261 2009
[25] E H Mamdani and S Assilian ldquoAn experiment in linguisticsynthesis with a fuzzy logic controllerrdquo International Journalof Man-Machine Studies vol 7 no 1 pp 1ndash13 1975
[26] Z Nariman M Salehpour A Jamali and E HanghgooldquoPareto optimization of a five-degree of freedom vehicle vi-bration model using a MUGArdquo Engineering Applications ofArtificial Intelligence vol 23 no 4 pp 543ndash551 2010
[27] H John G Michael and D Gregory ldquoMulti-objective controloptimization for semi-active vehicle suspensionsrdquo Journal ofSound and Vibration vol 330 pp 5502ndash5516 2011
[28] J Y Wong ldquoData processing methodology in the charac-terization of the mechanical properties of terrainrdquo Journal ofTerramechanics vol 17 no 1 pp 13ndash41 1980
Shock and Vibration 15
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

generations erefore the arithmetic crossover isperformed on 95 of the selected parents wherebytwo children are created from the weighted sum oftwo parents and children of the remaining 5 ofselected parents are exact copies of the parentsCrossover operation is performed until the pop-ulation number is doubled en each individualundergoes the mutation operation which is theprocess of randomly changing the values of genes in achromosomewith a probability of 005emutationcan create new genetic material into an existingindividual and add diversity to the genetic charac-teristics of the population Finally through the fitnessvalue J only the optimal individuals are selected atthe end of each generation to exist as the populationof the next generation For the termination criterionthe limitary generation is used then the resultantpopulation is evaluated to determine convergence
323 Optimal Result of the Control Rules In order to seekthe optimal control rules for the FPC we assume that thevibratory roller travels on the deformable terrain at a constantspeed v0 167mmiddotsminus1 and off-road terrain excitation input q(t)of the subsystem model is chosen as in Figure 3(a) with thesimulation time of 10 se scalar that weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibrations areαz 0486 αϕ 0449 and αθ 0065 respectively which aredecided based on the percent of the weighted RMS value of thevertical driverrsquos seat (486) cabrsquos pitch (449) and cabrsquos rollvibrations (65) with the weighted RMS values of the PHM inTable 1 e maximum generation is 200
e result in Figure 7 shows that the maximum fitnessvalue J is obtained from the evolutionary generation of 133to the end erefore the optimal individuals can be ob-tained at the generation of 133 By recording the optimalcontrol rules in FIS are listed in Table 2 e optimal controlrules are then used for the optimal FPC to simulate andanalyze the low-frequency performance of semi-active cabrsquoshydraulic mounts
4 Results and Discussion
41 Evaluation Criteria e performance of the vehiclesuspension system is evaluated by three main indices in thetime domain including the ride comfort working space androad holding characteristics
Among these three indices the ride comfort perfor-mance evaluated via the weighted RMS acceleration re-sponse is considered to be the most important index [1] Inaddition in the international standard ISO 2631-1 [12] thePSD acceleration response is also applied to estimate theeffect of vibration on the endurance limit of the human bodyin the frequency domain It was suggested that a low-frequency range of 4ndash10Hz for the vertical and of 05ndash2Hz for the rotational vibrations seriously affected thedriverrsquos health and safety In this study the performance ofSHM also is evaluated through both the PSD and theweighted RMS acceleration responses of the vertical driverrsquos
seat cabrsquos pitch and roll vibrations in the frequency andtime domains us the smaller PSD and weighted RMSvalues mean to be the better ability of the correspondingisolation mounts e expression of RMS was given by
awl
1T
1113946T
0euroxl(t)1113858 1113859
2dt
1113971
(9)
where euroxl(t) is the acceleration response in the l as a functionof time and T 50 s is the time of simulation
42 Control Performance When the Vehicle Travels on theDeformableTerrain In this study the vehicle is assumed to betraveling on a terrain type of Grenville loam given by Wong[28] at a constant speed v0 167mmiddotsminus1 e Grenville loamrsquosparameters including n 101 kc 006times103Nmiddotmminus(n+1)kφ 5880times103Nmiddotmminus(n+2) c 31times 103 Pa φ 298deg and itsoff-road terrain irregularity as in Figures 3(a) are the randomexcitation inputs of the simulatingmodel Simulations are thencarried out to analyze the low-frequency performance of SHMbased on the design parameters of a single drum vibratoryroller [1]
A good cabrsquos isolation system should be able to minimizeits deflection and acceleration to enhance the driverrsquos ridecomfort In addition the driverrsquos mental and physical healthis affected not only by the acceleration responses in the timeregion but also by the PSD acceleration responses in the low-frequency region [11]erefore the maximum PSD and theweighted RMS values of the vertical driverrsquos seat cab pitchand roll vibrations are respectively given to compare thelow-frequency performance of SHM
e simulation results of the PSD acceleration responsesof the vertical driverrsquos seat cabrsquos pitch and roll vibrations areplotted in Figures 8(a)ndash8(c) respectively In Figure 8 theresonance frequencies of PSD acceleration responses of thevertical driverrsquos seat cabrsquos pitch and roll vibrations withSHM without optimization and with optimization have notbeen changed in comparison with PHM is can be due tothe fact that stiffness coefficients of the cabrsquos isolation systemare unchanged and its damping control forces have almostno effect on the resonance frequencies However themaximum resonance peaks of the PSD acceleration re-sponses are significantly transformed by the SHM
e maximum resonance peaks of the PSD accelerationresponses of the vertical driverrsquos seat cabrsquos pitch and rollvibrations of SHM without optimization are smaller thanPHM Meanwhile the maximum resonance peaks of the PSDacceleration responses of SHM with optimization are thesmallest Especially in low-frequency below 4Hz the maxi-mum PSD values of the vertical driverrsquos seat cabrsquos pitch androll vibrations of SHM with optimization are greatly reducedby 3297 2908 and 6440 in comparison with PHMrespectively is is due to the main impact of the semi-activedamping force of hydraulic mount fd ch| _z| _z + u ere-fore the health of the driver can be clearly improved by SHMusing the optimal fuzzy-PID controller
e simulation results of the acceleration responses arealso shown in Figures 9(a)ndash9(c) In Figure 9 we can see that
8 Shock and Vibration
the acceleration responses of SHM with optimization arelower than both PHM and SHM without optimizationBesides the weighted RMS acceleration responses in Table 1also show that the weighted RMS values of the verticaldriverrsquos seat cabrsquos pitch and roll vibrations of SHM withoptimization are strongly reduced by 3499 4256 and4172 in comparison with PHM respectively e aboveanalysis results indicate that when the vehicle travels on thedeformable terrain the driverrsquos ride comfort can be clearlyimproved by SHM with optimization in both the time andthe low-frequency region erefore the SHM with opti-mization could provide the best ride comfort performancefor the off-road vibratory roller in the condition of thevehicle traveling
43 Control Performance When the Vehicle Moves andCompacts on the Elastoplastic Soil Ground In the workingcondition of the vibratory roller the effect of the elastoplasticsoil grounds on the performance of the compaction processwas studied under the excitation frequencies of the drum in arange of 01ndash70Hz [2ndash4 9] the research results showed thatcomprehensive drumsoil contact and loss of contact data
had appeared over a range of 15ndash40Hz [4] especially at theexcitation frequencies of 285Hz and 33Hz of the drumwhich yielded the maximum compaction forces due toldquodouble-jumprdquo of the drum [2 9] Based on the designparameters of a single drum vibratory roller [1] the exci-tation frequency of the vibratory drum in the workingcondition was also given at 28 and 35Hz therefore theexcitation frequencies of the vibratory drum at 28 and 35Hzwith the parameters of the vehicle [1] are used for simulationBesides in compression process of the drum the elastoplasticsoil properties are changed during the interaction between therigid drum and soil ground e elastoplastic soil propertiesare represented via three different values of the plasticityparameter ε including low-density soil ε 034 medium-density soil ε 072 and high-density soil ε 087 [9]However the elastoplastic property of low-density soil(ε 034) is similar to the property of a soft soil deformationwhich is simulated in the condition of the vehicle travelingerefore in order to evaluate the low-frequency perfor-mance of SHM in the condition of the vehicle working thevehicle is moved and compacted at very slow speed 083mmiddotsminus1under a lowhigh excitation frequency 2835Hz of the vi-bratory drum on a high elastoplastic soil ground e
50 100 150 2001
15
2
25
3X 133Y 2579
Evolutionary generations
J
Figure 7 e curve of fitness value
Table 1 e weighted RMS acceleration responses on a deformable terrain
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 1063 0875 0691 3499awϕc (radmiddotsminus2) 0982 0810 0564 4256awθc (radmiddotsminus2) 0139 0100 0081 4172
Table 2 Result of the optimal control rules
ECE
Kpprime Kiprime Kdprime
NB NS ZO PS PB NB NS ZO PS PB NB NS ZO PS PB
NB M MB B MS S S S M MB S S M B MB BNS MB M MS M MS S B MB MS M MS S M M SZO M S S S M MS MS S M MB M B S S MSPS MS M MS M B MS S M MB S MB MS S MS MSPB S MS M MB MB M M MS S S MS B S S M
Shock and Vibration 9
PHMSHM without optimizationSHM with optimization
05 1 2 4 8 16 32 640
02
04
06
08
Frequency (Hz)
Vert
ical
acce
lera
tion
PSD
(m2 middotsndash3
)X 209Y 0558
X 209Y 0374
ndash3297
(a)
PHMSHM without optimizationSHM with optimization
0
02
04
06
X 209Y 0361
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 209Y 0256
ndash2908
05 1 2 4 8 16 32 64Frequency (Hz)
(b)
PHMSHM without optimizationSHM with optimization
0
01
X 259Y 0059
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3)
X 259Y 0021
ndash6440
05 1 2 4 8 16 32 64Frequency (Hz)
(c)
Figure 8 Results of the PSD acceleration responses on the deformable terrain (a) Vertical driverrsquos seat (b) Cabrsquos pitch angle (c) Cabrsquos rollangle
PHMSHM without optimizationSHM with optimization
45 46 47 48 49 50ndash4
ndash2
0
2
4
Time (s)
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
(a)
PHMSHM without optimizationSHM with optimization
ndash4
ndash2
0
2
4
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
45 46 47 48 49 50Time (s)
(b)
Figure 9 Continued
10 Shock and Vibration
PHMSHM without optimizationSHM with optimization
ndash03
ndash02
ndash01
0
01
02
03
Roll
acce
lera
tion
(rad
middotsndash2)
45 46 47 48 49 50Time (s)
(c)
Figure 9 Results of the acceleration responses on the deformable terrain (a) Vertical driverrsquos seat (b) Cabrsquos pitch angle (c) Cabrsquos roll angle
05 1 2 4 8 16 32 640
01
02
03
04
X 569Y 0074
Frequency (Hz)
Vert
ical
acce
lera
tion
PSD
(m2 middotsndash3
)
X 2818Y 0014
X 209Y 0376 ndash2446
PHMSHM without optimizationSHM with optimization
X 209Y 0284
(a)
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
X 2818Y 0033
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 569Y 0045
X 209Y 0197
X 209Y 0135
ndash3147
PHMSHM without optimizationSHM with optimization
(b)
05 1 2 4 8 16 32 64Frequency (Hz)
0
001
002
003
004
X 2818Y 0008
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3) X 249
Y 0032
X 269Y 0013 X 569
Y 0011
ndash5937
PHMSHM without optimizationSHM with optimization
(c)
Figure 10 Results of the PSD acceleration responses under a low excitation frequency 28Hz of the drum (a) Vertical driverrsquos seat (b)Cabrsquos pitch angle (c) Cabrsquos roll angle
Shock and Vibration 11
parameters of the high elastoplastic soil ground includesε 087 ksp 283times106Nmiddotmminus1 kse 423times106Nmiddotmminus1 andcse 371times 103Nsmiddotmminus1
e comparison results of the PSD acceleration responsesof the vertical driverrsquos seat cabrsquos pitch and roll vibrations withthe cabrsquos isolation systems at a lowhigh excitation frequency2835Hz of the vibratory drum are seen in Figures 10 and 11Similarly in the condition of the vehicle traveling the res-onance frequencies of PSD acceleration responses of thevertical driverrsquos seat cabrsquos pitch and roll vibrations of SHMwithout optimization and SHM with optimization are alsounchanged in comparison with PHM e simulation resultsalso show that the resonance frequencies of SHM withoutoptimization and SHMwith optimization also occur at 28183518Hz comparable with PHM in all three directions iscan be due to the effect of the resonance at a lowhigh ex-citation frequency 2835Hz of the vibratory drum In ad-dition the resonance frequency of the acceleration PSDresponses of all cabrsquos isolation systems clearly appears at569Hz in both graphs of Figures 10 and 11 whereas thisresonance frequency does not occur in the graph of Figure 8
is particularity may be due to the effect of the soil stiffnesswith the high-density soil ground
Besides at a low-frequency range below 4Hz themaximum resonance peaks of the PSD acceleration re-sponses of the vertical driverrsquos seat cabrsquos pitch and rollvibrations of SHMwith optimization are strongly reduced incomparison with PHM by 2446 3147 and 5937 at alow excitation frequency 28Hz of the drum and by 17763352 and 5385 at a high excitation frequency 35Hz ofthe drum respectively is is also due to the main impact ofthe semi-active damping force of hydraulic mountfd ch| _z| _z + u Contrarily at a frequency range upper 4Hzthe PSD acceleration responses of the vertical driverrsquos seatcabrsquos pitch and roll vibrations of SHMwithout optimizationand SHM with optimization are slightly increased incomparison with PHM especially at the resonance fre-quency of 569Hz However the PSD acceleration values arevery small erefore the driverrsquos health can be clearlyimproved by using SHM with optimization in the low-frequency region when the vehicle moves and compactson an elastoplastic soil ground
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
03
04Ve
rtic
al ac
cele
ratio
n PS
D (m
2 middotsndash3)
X 3518Y 00018
X 569Y 0031
X 209Y 0321
X 209Y 0264
ndash1776
PHMSHM without optimizationSHM with optimization
(a)
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 3518Y 0015
X 569Y 0019
X 209Y 0182
X 209Y 0121
ndash3352
PHMSHM without optimizationSHM with optimization
(b)
05 1 2 4 8 16 32 64Frequency (Hz)
0
001
002
003
004
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3)
X 569Y 0004
X 249Y 0026
X 3518Y 00035
X 269Y 0012
ndash5385
PHMSHM without optimizationSHM with optimization
(c)
Figure 11 Results of the PSD acceleration responses under a high excitation frequency 35Hz of the drum (a) Vertical driverrsquos seat (b)Cabrsquos pitch angle (c) Cabrsquos roll angle
12 Shock and Vibration
45 46 47 48 49 50ndash2
ndash1
0
1
2
Time (s)
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(a)
45 46 47 48 49 50Time (s)
ndash1
ndash05
0
05
1
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(b)
45 46 47 48 49 50Time (s)
ndash01
ndash005
0
005
01
Roll
acce
lera
tion
(rad
middotsndash2)
PHMSHM without optimizationSHM with optimization
(c)
Figure 12 Results of the acceleration responses under a low excitation frequency 28Hz of the drum (a) Vertical driverrsquos seat (b) Cabrsquospitch angle (c) Cabrsquos roll angle
45 46 47 48 49 50Time (s)
ndash2
ndash1
0
1
2
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(a)
45 46 47 48 49 50Time (s)
ndash1
ndash05
0
05
1
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(b)
Figure 13 Continued
Shock and Vibration 13
e simulation results in Figures 12 and 13 also showthat the acceleration responses of the vertical driverrsquos seatcabrsquos pitch and roll vibrations of SHM with optimizationare lower than both PHM and SHM without optimizationBesides the values of the weighted RMS accelerationresponses are also listed in Tables 3 and 4 e weightedRMS values of the vertical driverrsquos seat cabrsquos pitch androll vibrations of SHM with optimization are greatly re-duced in comparison with SHM by 3516 4829 and3765 under a low excitation frequency 28 Hz of thedrum and by 2480 4315 and 3606 under a highexcitation frequency 35 Hz of the drum respectivelyConsequently the above analysis results also indicate thatthe driverrsquos ride comfort and health are strongly improvedby SHM with optimization when the vehicle moves andcompacts on the high elastoplastic soil ground under boththe lowhigh excitation frequency 2835 Hz of the vi-bratory drum
5 Conclusions
Modeling and low-frequency performance analysis of semi-active cabrsquos hydraulic mounts of the off-road vibratory rollerare addressed in this work e comparison between thesimulation and test results of passive cabrsquos isolation mounts
is also carried out e low-frequency performance of SHMusing the optimal fuzzy-PID controller is then evaluatedthrough the PSD acceleration and weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibrations inboth the frequency and time domains e results aresummarized as follows
(1) In the condition of the vehicle traveling the weightedRMS acceleration responses and the PSD accelera-tion responses of the vertical driverrsquos seat cabrsquos pitchand roll vibrations of SHM with optimization arelower than both PHM and SHM without optimi-zation Particularly the weighted RMS values ofSHM with optimization are strongly reduced incomparison with PHM by 3499 4256 and4172 respectively
(2) In condition of the vehicle working both PSD ac-celeration responses and the weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibra-tions of SHM using the optimal fuzzy-PID controllerare clearly smaller comparable with both PHM andSHM without optimization under both lowhighexcitation frequency 2835Hz of the drum on thehigh elastoplastic soil ground Especially the maxi-mum PSD values of the vertical driverrsquos seat cabrsquos
45 46 47 48 49 50Time (s)
ndash01
ndash005
0
005
01
Roll
acce
lera
tion
(rad
middotsndash2)
PHMSHM without optimizationSHM with optimization
(c)
Figure 13 Results of the acceleration responses under a high excitation frequency 35Hz of the drum (a) Vertical driverrsquos seat (b) Cabrsquospitch angle (c) Cabrsquos roll angle
Table 3 e weighted RMS values under a low excitation frequency 28Hz of the drum
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 0657 0501 0426 3516awϕc (radmiddotsminus2) 0323 0184 0167 4829awθc (radmiddotsminus2) 0085 0056 0053 3765
Table 4 e weighted RMS values under a high excitation frequency 35Hz of the drum
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 0512 0453 0385 2480awϕc (radmiddotsminus2) 0241 0162 0137 4315awθc (radmiddotsminus2) 0061 0040 0039 3606
14 Shock and Vibration
pitch and roll vibrations of SHM with optimizationare strongly reduced by 2446 3147 and 5937in comparison with PHM when the vehicle compactsat a low excitation frequency 28Hz of the drum
(3) e above analysis results indicate that the low-frequency and high-stiffness characteristics of SHMusing the optimal fuzzy-PID controller have the besteffect on isolating low-frequency vibration trans-mitted and controlling the cab shaking under variousoperating conditions of the off-road vibratory roller
Data Availability
e data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] V Liem J Zhang V Quynh and R Jiao ldquoVibration analysisand modeling of an off-road vibratory roller equipped withthree different cabrsquos isolation mountsrdquo Shock and Vibrationvol 2018 Article ID 8527574 17 pages 2018
[2] D Adam and F Kopf ldquoeoretical analysis of dynamicallyloaded soilsrdquo in Proceedings of the European WorkshopCompaction of Soils and Granular Materials pp 207ndash217Paris France 2000
[3] J Li Z Zhang H Xu and Z Feng ldquoDynamic characteristicsof the vibratory roller test-bed vibration isolation systemsimulation and experimentrdquo Journal of Terramechanicsvol 56 pp 139ndash156 2014
[4] J Paul and A Michael ldquoCapturing nonlinear vibratory rollercompactor behavior through lumped parameter modelingrdquoJournal of Engineering Mechanics vol 134 no 8 pp 684ndash6932008
[5] X Zhang Modelling simulation and optimization of ridecomfort for off road articulated dump trucks PhD thesisSoutheast University Nanjing China 2010
[6] A Pakowski and D Cao ldquoEffect of soil deformability on off-road vehicle ride dynamicsrdquo SAE International Journal ofCommercial Vehicles vol 6 no 2 pp 362ndash371 2013
[7] R A Irani R J Bauer and A Warkentin ldquoDynamic wheel-soil model for lightweight mobile robots with smooth wheelsrdquoJournal of Intelligent amp Robotic Systems vol 71 no 2pp 179ndash193 2013
[8] S Park A A Popov and D J Cole ldquoInfluence of soil de-formation on off-road heavy vehicle suspension vibrationrdquoJournal of Terramechanics vol 41 no 1 pp 41ndash68 2004
[9] A Kordestani S Rakheja P Marcotte A Pazooki andD Juras ldquoAnalysis of ride vibration environment of soilcompactorsrdquo SAE International Journal of Commercial Ve-hicles vol 3 no 1 pp 259ndash272 2010
[10] V Quynh Vibration study and control for cab of vibratoryroller PhD thesis Southeast University Nanjing China2013
[11] M Griffin Handbook of Human Vibration Academic PressLondon UK 1990
[12] International Organization for Standardization ldquoMechanicalvibration and shock-evaluation of human exposure to wholebody vibration-part 2 general requirementsrdquo Tech Rep ISO2631-11997 ISO Geneva Switzerland 1997
[13] S Yildirim ldquoVibration control of suspension systems using aproposed neural networkrdquo Journal of Sound and Vibrationvol 277 no 4-5 pp 1059ndash1069 2004
[14] N Ebrahimi and A Gharaveisi ldquoOptimal fuzzy supervisorcontroller for an active suspension systemrdquo InternationalJournal of Soft Computing amp Engineering vol 2 no 4pp 36ndash39 2012
[15] Z Xie P Wong J Zhao T Xu and I Wong ldquoA noise-insensitive semi-active air suspension for heavy-duty vehicleswith an integrated fuzzy-wheelbase preview controlrdquo Math-ematical Problem in Engineering vol 2013 Article ID 12195312 pages 2013
[16] B Kasemi A G A Muthalif M M Rashid and S FathimaldquoFuzzy-PID controller for semi-active vibration control usingmagnetorheological fluid damperrdquo Procedia Engineeringvol 41 pp 1221ndash1227 2012
[17] T Nguyen A novel semi-active magnetorheological mount forvibration isolation PhD thesis e University of ToledoToledo OH USA 2009
[18] A Muthalif B Kasemi D Nordin and M Rashid ldquoSemi-active vibration control using experimental model of Mag-netorheological damper with adaptive fuzzy-PID controllerrdquoSmart Structures and Systems vol 20 no 1 pp 85ndash97 2017
[19] S D Nguyen Q H Nguyen and S-B Choi ldquoA hybridclustering based fuzzy structure for vibration control-part 2an application to semi-active vehicle seat-suspension systemrdquoMechanical Systems and Signal Processing vol 56-57pp 288ndash301 2015
[20] W Wang Y Song Y Xue H Jin J Hou and M Zhao ldquoAnoptimal vibration control strategy for a vehiclersquos active sus-pension based on improved cultural algorithmrdquo Applied SoftComputing vol 28 pp 167ndash174 2015
[21] Y Chen Z Wang J Qiu and Z Huang ldquoHybrid fuzzyskyhook surface control using multi-objective microgeneticalgorithm for semi-active vehicle suspension system ridecomfort stability analysisrdquo Journal of Dynamic SystemsMeasurement amp Control vol 134 no 4 pp 1ndash14 2012
[22] International Organization for Standardization ldquoReportingvehicle road surface irregularitiesrdquo Tech Rep ISOTC108SC2WG4 N57 ieme Medical Publishers Stuttgart Germany1982
[23] M Mitschke Dynamik der Kraftfahrzeuge Springer-VerlagBerlin Germany 1972
[24] M Rahmat ldquoApplication of selftuning fuzzy PID controlleron industrial hydraulic actuator using system identificationapproachrdquo International Journal on Smart Sensing amp In-telligent Systems vol 2 no 2 pp 246ndash261 2009
[25] E H Mamdani and S Assilian ldquoAn experiment in linguisticsynthesis with a fuzzy logic controllerrdquo International Journalof Man-Machine Studies vol 7 no 1 pp 1ndash13 1975
[26] Z Nariman M Salehpour A Jamali and E HanghgooldquoPareto optimization of a five-degree of freedom vehicle vi-bration model using a MUGArdquo Engineering Applications ofArtificial Intelligence vol 23 no 4 pp 543ndash551 2010
[27] H John G Michael and D Gregory ldquoMulti-objective controloptimization for semi-active vehicle suspensionsrdquo Journal ofSound and Vibration vol 330 pp 5502ndash5516 2011
[28] J Y Wong ldquoData processing methodology in the charac-terization of the mechanical properties of terrainrdquo Journal ofTerramechanics vol 17 no 1 pp 13ndash41 1980
Shock and Vibration 15
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

the acceleration responses of SHM with optimization arelower than both PHM and SHM without optimizationBesides the weighted RMS acceleration responses in Table 1also show that the weighted RMS values of the verticaldriverrsquos seat cabrsquos pitch and roll vibrations of SHM withoptimization are strongly reduced by 3499 4256 and4172 in comparison with PHM respectively e aboveanalysis results indicate that when the vehicle travels on thedeformable terrain the driverrsquos ride comfort can be clearlyimproved by SHM with optimization in both the time andthe low-frequency region erefore the SHM with opti-mization could provide the best ride comfort performancefor the off-road vibratory roller in the condition of thevehicle traveling
43 Control Performance When the Vehicle Moves andCompacts on the Elastoplastic Soil Ground In the workingcondition of the vibratory roller the effect of the elastoplasticsoil grounds on the performance of the compaction processwas studied under the excitation frequencies of the drum in arange of 01ndash70Hz [2ndash4 9] the research results showed thatcomprehensive drumsoil contact and loss of contact data
had appeared over a range of 15ndash40Hz [4] especially at theexcitation frequencies of 285Hz and 33Hz of the drumwhich yielded the maximum compaction forces due toldquodouble-jumprdquo of the drum [2 9] Based on the designparameters of a single drum vibratory roller [1] the exci-tation frequency of the vibratory drum in the workingcondition was also given at 28 and 35Hz therefore theexcitation frequencies of the vibratory drum at 28 and 35Hzwith the parameters of the vehicle [1] are used for simulationBesides in compression process of the drum the elastoplasticsoil properties are changed during the interaction between therigid drum and soil ground e elastoplastic soil propertiesare represented via three different values of the plasticityparameter ε including low-density soil ε 034 medium-density soil ε 072 and high-density soil ε 087 [9]However the elastoplastic property of low-density soil(ε 034) is similar to the property of a soft soil deformationwhich is simulated in the condition of the vehicle travelingerefore in order to evaluate the low-frequency perfor-mance of SHM in the condition of the vehicle working thevehicle is moved and compacted at very slow speed 083mmiddotsminus1under a lowhigh excitation frequency 2835Hz of the vi-bratory drum on a high elastoplastic soil ground e
50 100 150 2001
15
2
25
3X 133Y 2579
Evolutionary generations
J
Figure 7 e curve of fitness value
Table 1 e weighted RMS acceleration responses on a deformable terrain
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 1063 0875 0691 3499awϕc (radmiddotsminus2) 0982 0810 0564 4256awθc (radmiddotsminus2) 0139 0100 0081 4172
Table 2 Result of the optimal control rules
ECE
Kpprime Kiprime Kdprime
NB NS ZO PS PB NB NS ZO PS PB NB NS ZO PS PB
NB M MB B MS S S S M MB S S M B MB BNS MB M MS M MS S B MB MS M MS S M M SZO M S S S M MS MS S M MB M B S S MSPS MS M MS M B MS S M MB S MB MS S MS MSPB S MS M MB MB M M MS S S MS B S S M
Shock and Vibration 9
PHMSHM without optimizationSHM with optimization
05 1 2 4 8 16 32 640
02
04
06
08
Frequency (Hz)
Vert
ical
acce
lera
tion
PSD
(m2 middotsndash3
)X 209Y 0558
X 209Y 0374
ndash3297
(a)
PHMSHM without optimizationSHM with optimization
0
02
04
06
X 209Y 0361
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 209Y 0256
ndash2908
05 1 2 4 8 16 32 64Frequency (Hz)
(b)
PHMSHM without optimizationSHM with optimization
0
01
X 259Y 0059
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3)
X 259Y 0021
ndash6440
05 1 2 4 8 16 32 64Frequency (Hz)
(c)
Figure 8 Results of the PSD acceleration responses on the deformable terrain (a) Vertical driverrsquos seat (b) Cabrsquos pitch angle (c) Cabrsquos rollangle
PHMSHM without optimizationSHM with optimization
45 46 47 48 49 50ndash4
ndash2
0
2
4
Time (s)
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
(a)
PHMSHM without optimizationSHM with optimization
ndash4
ndash2
0
2
4
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
45 46 47 48 49 50Time (s)
(b)
Figure 9 Continued
10 Shock and Vibration
PHMSHM without optimizationSHM with optimization
ndash03
ndash02
ndash01
0
01
02
03
Roll
acce
lera
tion
(rad
middotsndash2)
45 46 47 48 49 50Time (s)
(c)
Figure 9 Results of the acceleration responses on the deformable terrain (a) Vertical driverrsquos seat (b) Cabrsquos pitch angle (c) Cabrsquos roll angle
05 1 2 4 8 16 32 640
01
02
03
04
X 569Y 0074
Frequency (Hz)
Vert
ical
acce
lera
tion
PSD
(m2 middotsndash3
)
X 2818Y 0014
X 209Y 0376 ndash2446
PHMSHM without optimizationSHM with optimization
X 209Y 0284
(a)
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
X 2818Y 0033
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 569Y 0045
X 209Y 0197
X 209Y 0135
ndash3147
PHMSHM without optimizationSHM with optimization
(b)
05 1 2 4 8 16 32 64Frequency (Hz)
0
001
002
003
004
X 2818Y 0008
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3) X 249
Y 0032
X 269Y 0013 X 569
Y 0011
ndash5937
PHMSHM without optimizationSHM with optimization
(c)
Figure 10 Results of the PSD acceleration responses under a low excitation frequency 28Hz of the drum (a) Vertical driverrsquos seat (b)Cabrsquos pitch angle (c) Cabrsquos roll angle
Shock and Vibration 11
parameters of the high elastoplastic soil ground includesε 087 ksp 283times106Nmiddotmminus1 kse 423times106Nmiddotmminus1 andcse 371times 103Nsmiddotmminus1
e comparison results of the PSD acceleration responsesof the vertical driverrsquos seat cabrsquos pitch and roll vibrations withthe cabrsquos isolation systems at a lowhigh excitation frequency2835Hz of the vibratory drum are seen in Figures 10 and 11Similarly in the condition of the vehicle traveling the res-onance frequencies of PSD acceleration responses of thevertical driverrsquos seat cabrsquos pitch and roll vibrations of SHMwithout optimization and SHM with optimization are alsounchanged in comparison with PHM e simulation resultsalso show that the resonance frequencies of SHM withoutoptimization and SHMwith optimization also occur at 28183518Hz comparable with PHM in all three directions iscan be due to the effect of the resonance at a lowhigh ex-citation frequency 2835Hz of the vibratory drum In ad-dition the resonance frequency of the acceleration PSDresponses of all cabrsquos isolation systems clearly appears at569Hz in both graphs of Figures 10 and 11 whereas thisresonance frequency does not occur in the graph of Figure 8
is particularity may be due to the effect of the soil stiffnesswith the high-density soil ground
Besides at a low-frequency range below 4Hz themaximum resonance peaks of the PSD acceleration re-sponses of the vertical driverrsquos seat cabrsquos pitch and rollvibrations of SHMwith optimization are strongly reduced incomparison with PHM by 2446 3147 and 5937 at alow excitation frequency 28Hz of the drum and by 17763352 and 5385 at a high excitation frequency 35Hz ofthe drum respectively is is also due to the main impact ofthe semi-active damping force of hydraulic mountfd ch| _z| _z + u Contrarily at a frequency range upper 4Hzthe PSD acceleration responses of the vertical driverrsquos seatcabrsquos pitch and roll vibrations of SHMwithout optimizationand SHM with optimization are slightly increased incomparison with PHM especially at the resonance fre-quency of 569Hz However the PSD acceleration values arevery small erefore the driverrsquos health can be clearlyimproved by using SHM with optimization in the low-frequency region when the vehicle moves and compactson an elastoplastic soil ground
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
03
04Ve
rtic
al ac
cele
ratio
n PS
D (m
2 middotsndash3)
X 3518Y 00018
X 569Y 0031
X 209Y 0321
X 209Y 0264
ndash1776
PHMSHM without optimizationSHM with optimization
(a)
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 3518Y 0015
X 569Y 0019
X 209Y 0182
X 209Y 0121
ndash3352
PHMSHM without optimizationSHM with optimization
(b)
05 1 2 4 8 16 32 64Frequency (Hz)
0
001
002
003
004
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3)
X 569Y 0004
X 249Y 0026
X 3518Y 00035
X 269Y 0012
ndash5385
PHMSHM without optimizationSHM with optimization
(c)
Figure 11 Results of the PSD acceleration responses under a high excitation frequency 35Hz of the drum (a) Vertical driverrsquos seat (b)Cabrsquos pitch angle (c) Cabrsquos roll angle
12 Shock and Vibration
45 46 47 48 49 50ndash2
ndash1
0
1
2
Time (s)
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(a)
45 46 47 48 49 50Time (s)
ndash1
ndash05
0
05
1
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(b)
45 46 47 48 49 50Time (s)
ndash01
ndash005
0
005
01
Roll
acce
lera
tion
(rad
middotsndash2)
PHMSHM without optimizationSHM with optimization
(c)
Figure 12 Results of the acceleration responses under a low excitation frequency 28Hz of the drum (a) Vertical driverrsquos seat (b) Cabrsquospitch angle (c) Cabrsquos roll angle
45 46 47 48 49 50Time (s)
ndash2
ndash1
0
1
2
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(a)
45 46 47 48 49 50Time (s)
ndash1
ndash05
0
05
1
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(b)
Figure 13 Continued
Shock and Vibration 13
e simulation results in Figures 12 and 13 also showthat the acceleration responses of the vertical driverrsquos seatcabrsquos pitch and roll vibrations of SHM with optimizationare lower than both PHM and SHM without optimizationBesides the values of the weighted RMS accelerationresponses are also listed in Tables 3 and 4 e weightedRMS values of the vertical driverrsquos seat cabrsquos pitch androll vibrations of SHM with optimization are greatly re-duced in comparison with SHM by 3516 4829 and3765 under a low excitation frequency 28 Hz of thedrum and by 2480 4315 and 3606 under a highexcitation frequency 35 Hz of the drum respectivelyConsequently the above analysis results also indicate thatthe driverrsquos ride comfort and health are strongly improvedby SHM with optimization when the vehicle moves andcompacts on the high elastoplastic soil ground under boththe lowhigh excitation frequency 2835 Hz of the vi-bratory drum
5 Conclusions
Modeling and low-frequency performance analysis of semi-active cabrsquos hydraulic mounts of the off-road vibratory rollerare addressed in this work e comparison between thesimulation and test results of passive cabrsquos isolation mounts
is also carried out e low-frequency performance of SHMusing the optimal fuzzy-PID controller is then evaluatedthrough the PSD acceleration and weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibrations inboth the frequency and time domains e results aresummarized as follows
(1) In the condition of the vehicle traveling the weightedRMS acceleration responses and the PSD accelera-tion responses of the vertical driverrsquos seat cabrsquos pitchand roll vibrations of SHM with optimization arelower than both PHM and SHM without optimi-zation Particularly the weighted RMS values ofSHM with optimization are strongly reduced incomparison with PHM by 3499 4256 and4172 respectively
(2) In condition of the vehicle working both PSD ac-celeration responses and the weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibra-tions of SHM using the optimal fuzzy-PID controllerare clearly smaller comparable with both PHM andSHM without optimization under both lowhighexcitation frequency 2835Hz of the drum on thehigh elastoplastic soil ground Especially the maxi-mum PSD values of the vertical driverrsquos seat cabrsquos
45 46 47 48 49 50Time (s)
ndash01
ndash005
0
005
01
Roll
acce
lera
tion
(rad
middotsndash2)
PHMSHM without optimizationSHM with optimization
(c)
Figure 13 Results of the acceleration responses under a high excitation frequency 35Hz of the drum (a) Vertical driverrsquos seat (b) Cabrsquospitch angle (c) Cabrsquos roll angle
Table 3 e weighted RMS values under a low excitation frequency 28Hz of the drum
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 0657 0501 0426 3516awϕc (radmiddotsminus2) 0323 0184 0167 4829awθc (radmiddotsminus2) 0085 0056 0053 3765
Table 4 e weighted RMS values under a high excitation frequency 35Hz of the drum
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 0512 0453 0385 2480awϕc (radmiddotsminus2) 0241 0162 0137 4315awθc (radmiddotsminus2) 0061 0040 0039 3606
14 Shock and Vibration
pitch and roll vibrations of SHM with optimizationare strongly reduced by 2446 3147 and 5937in comparison with PHM when the vehicle compactsat a low excitation frequency 28Hz of the drum
(3) e above analysis results indicate that the low-frequency and high-stiffness characteristics of SHMusing the optimal fuzzy-PID controller have the besteffect on isolating low-frequency vibration trans-mitted and controlling the cab shaking under variousoperating conditions of the off-road vibratory roller
Data Availability
e data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] V Liem J Zhang V Quynh and R Jiao ldquoVibration analysisand modeling of an off-road vibratory roller equipped withthree different cabrsquos isolation mountsrdquo Shock and Vibrationvol 2018 Article ID 8527574 17 pages 2018
[2] D Adam and F Kopf ldquoeoretical analysis of dynamicallyloaded soilsrdquo in Proceedings of the European WorkshopCompaction of Soils and Granular Materials pp 207ndash217Paris France 2000
[3] J Li Z Zhang H Xu and Z Feng ldquoDynamic characteristicsof the vibratory roller test-bed vibration isolation systemsimulation and experimentrdquo Journal of Terramechanicsvol 56 pp 139ndash156 2014
[4] J Paul and A Michael ldquoCapturing nonlinear vibratory rollercompactor behavior through lumped parameter modelingrdquoJournal of Engineering Mechanics vol 134 no 8 pp 684ndash6932008
[5] X Zhang Modelling simulation and optimization of ridecomfort for off road articulated dump trucks PhD thesisSoutheast University Nanjing China 2010
[6] A Pakowski and D Cao ldquoEffect of soil deformability on off-road vehicle ride dynamicsrdquo SAE International Journal ofCommercial Vehicles vol 6 no 2 pp 362ndash371 2013
[7] R A Irani R J Bauer and A Warkentin ldquoDynamic wheel-soil model for lightweight mobile robots with smooth wheelsrdquoJournal of Intelligent amp Robotic Systems vol 71 no 2pp 179ndash193 2013
[8] S Park A A Popov and D J Cole ldquoInfluence of soil de-formation on off-road heavy vehicle suspension vibrationrdquoJournal of Terramechanics vol 41 no 1 pp 41ndash68 2004
[9] A Kordestani S Rakheja P Marcotte A Pazooki andD Juras ldquoAnalysis of ride vibration environment of soilcompactorsrdquo SAE International Journal of Commercial Ve-hicles vol 3 no 1 pp 259ndash272 2010
[10] V Quynh Vibration study and control for cab of vibratoryroller PhD thesis Southeast University Nanjing China2013
[11] M Griffin Handbook of Human Vibration Academic PressLondon UK 1990
[12] International Organization for Standardization ldquoMechanicalvibration and shock-evaluation of human exposure to wholebody vibration-part 2 general requirementsrdquo Tech Rep ISO2631-11997 ISO Geneva Switzerland 1997
[13] S Yildirim ldquoVibration control of suspension systems using aproposed neural networkrdquo Journal of Sound and Vibrationvol 277 no 4-5 pp 1059ndash1069 2004
[14] N Ebrahimi and A Gharaveisi ldquoOptimal fuzzy supervisorcontroller for an active suspension systemrdquo InternationalJournal of Soft Computing amp Engineering vol 2 no 4pp 36ndash39 2012
[15] Z Xie P Wong J Zhao T Xu and I Wong ldquoA noise-insensitive semi-active air suspension for heavy-duty vehicleswith an integrated fuzzy-wheelbase preview controlrdquo Math-ematical Problem in Engineering vol 2013 Article ID 12195312 pages 2013
[16] B Kasemi A G A Muthalif M M Rashid and S FathimaldquoFuzzy-PID controller for semi-active vibration control usingmagnetorheological fluid damperrdquo Procedia Engineeringvol 41 pp 1221ndash1227 2012
[17] T Nguyen A novel semi-active magnetorheological mount forvibration isolation PhD thesis e University of ToledoToledo OH USA 2009
[18] A Muthalif B Kasemi D Nordin and M Rashid ldquoSemi-active vibration control using experimental model of Mag-netorheological damper with adaptive fuzzy-PID controllerrdquoSmart Structures and Systems vol 20 no 1 pp 85ndash97 2017
[19] S D Nguyen Q H Nguyen and S-B Choi ldquoA hybridclustering based fuzzy structure for vibration control-part 2an application to semi-active vehicle seat-suspension systemrdquoMechanical Systems and Signal Processing vol 56-57pp 288ndash301 2015
[20] W Wang Y Song Y Xue H Jin J Hou and M Zhao ldquoAnoptimal vibration control strategy for a vehiclersquos active sus-pension based on improved cultural algorithmrdquo Applied SoftComputing vol 28 pp 167ndash174 2015
[21] Y Chen Z Wang J Qiu and Z Huang ldquoHybrid fuzzyskyhook surface control using multi-objective microgeneticalgorithm for semi-active vehicle suspension system ridecomfort stability analysisrdquo Journal of Dynamic SystemsMeasurement amp Control vol 134 no 4 pp 1ndash14 2012
[22] International Organization for Standardization ldquoReportingvehicle road surface irregularitiesrdquo Tech Rep ISOTC108SC2WG4 N57 ieme Medical Publishers Stuttgart Germany1982
[23] M Mitschke Dynamik der Kraftfahrzeuge Springer-VerlagBerlin Germany 1972
[24] M Rahmat ldquoApplication of selftuning fuzzy PID controlleron industrial hydraulic actuator using system identificationapproachrdquo International Journal on Smart Sensing amp In-telligent Systems vol 2 no 2 pp 246ndash261 2009
[25] E H Mamdani and S Assilian ldquoAn experiment in linguisticsynthesis with a fuzzy logic controllerrdquo International Journalof Man-Machine Studies vol 7 no 1 pp 1ndash13 1975
[26] Z Nariman M Salehpour A Jamali and E HanghgooldquoPareto optimization of a five-degree of freedom vehicle vi-bration model using a MUGArdquo Engineering Applications ofArtificial Intelligence vol 23 no 4 pp 543ndash551 2010
[27] H John G Michael and D Gregory ldquoMulti-objective controloptimization for semi-active vehicle suspensionsrdquo Journal ofSound and Vibration vol 330 pp 5502ndash5516 2011
[28] J Y Wong ldquoData processing methodology in the charac-terization of the mechanical properties of terrainrdquo Journal ofTerramechanics vol 17 no 1 pp 13ndash41 1980
Shock and Vibration 15
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

PHMSHM without optimizationSHM with optimization
05 1 2 4 8 16 32 640
02
04
06
08
Frequency (Hz)
Vert
ical
acce
lera
tion
PSD
(m2 middotsndash3
)X 209Y 0558
X 209Y 0374
ndash3297
(a)
PHMSHM without optimizationSHM with optimization
0
02
04
06
X 209Y 0361
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 209Y 0256
ndash2908
05 1 2 4 8 16 32 64Frequency (Hz)
(b)
PHMSHM without optimizationSHM with optimization
0
01
X 259Y 0059
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3)
X 259Y 0021
ndash6440
05 1 2 4 8 16 32 64Frequency (Hz)
(c)
Figure 8 Results of the PSD acceleration responses on the deformable terrain (a) Vertical driverrsquos seat (b) Cabrsquos pitch angle (c) Cabrsquos rollangle
PHMSHM without optimizationSHM with optimization
45 46 47 48 49 50ndash4
ndash2
0
2
4
Time (s)
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
(a)
PHMSHM without optimizationSHM with optimization
ndash4
ndash2
0
2
4
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
45 46 47 48 49 50Time (s)
(b)
Figure 9 Continued
10 Shock and Vibration
PHMSHM without optimizationSHM with optimization
ndash03
ndash02
ndash01
0
01
02
03
Roll
acce
lera
tion
(rad
middotsndash2)
45 46 47 48 49 50Time (s)
(c)
Figure 9 Results of the acceleration responses on the deformable terrain (a) Vertical driverrsquos seat (b) Cabrsquos pitch angle (c) Cabrsquos roll angle
05 1 2 4 8 16 32 640
01
02
03
04
X 569Y 0074
Frequency (Hz)
Vert
ical
acce
lera
tion
PSD
(m2 middotsndash3
)
X 2818Y 0014
X 209Y 0376 ndash2446
PHMSHM without optimizationSHM with optimization
X 209Y 0284
(a)
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
X 2818Y 0033
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 569Y 0045
X 209Y 0197
X 209Y 0135
ndash3147
PHMSHM without optimizationSHM with optimization
(b)
05 1 2 4 8 16 32 64Frequency (Hz)
0
001
002
003
004
X 2818Y 0008
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3) X 249
Y 0032
X 269Y 0013 X 569
Y 0011
ndash5937
PHMSHM without optimizationSHM with optimization
(c)
Figure 10 Results of the PSD acceleration responses under a low excitation frequency 28Hz of the drum (a) Vertical driverrsquos seat (b)Cabrsquos pitch angle (c) Cabrsquos roll angle
Shock and Vibration 11
parameters of the high elastoplastic soil ground includesε 087 ksp 283times106Nmiddotmminus1 kse 423times106Nmiddotmminus1 andcse 371times 103Nsmiddotmminus1
e comparison results of the PSD acceleration responsesof the vertical driverrsquos seat cabrsquos pitch and roll vibrations withthe cabrsquos isolation systems at a lowhigh excitation frequency2835Hz of the vibratory drum are seen in Figures 10 and 11Similarly in the condition of the vehicle traveling the res-onance frequencies of PSD acceleration responses of thevertical driverrsquos seat cabrsquos pitch and roll vibrations of SHMwithout optimization and SHM with optimization are alsounchanged in comparison with PHM e simulation resultsalso show that the resonance frequencies of SHM withoutoptimization and SHMwith optimization also occur at 28183518Hz comparable with PHM in all three directions iscan be due to the effect of the resonance at a lowhigh ex-citation frequency 2835Hz of the vibratory drum In ad-dition the resonance frequency of the acceleration PSDresponses of all cabrsquos isolation systems clearly appears at569Hz in both graphs of Figures 10 and 11 whereas thisresonance frequency does not occur in the graph of Figure 8
is particularity may be due to the effect of the soil stiffnesswith the high-density soil ground
Besides at a low-frequency range below 4Hz themaximum resonance peaks of the PSD acceleration re-sponses of the vertical driverrsquos seat cabrsquos pitch and rollvibrations of SHMwith optimization are strongly reduced incomparison with PHM by 2446 3147 and 5937 at alow excitation frequency 28Hz of the drum and by 17763352 and 5385 at a high excitation frequency 35Hz ofthe drum respectively is is also due to the main impact ofthe semi-active damping force of hydraulic mountfd ch| _z| _z + u Contrarily at a frequency range upper 4Hzthe PSD acceleration responses of the vertical driverrsquos seatcabrsquos pitch and roll vibrations of SHMwithout optimizationand SHM with optimization are slightly increased incomparison with PHM especially at the resonance fre-quency of 569Hz However the PSD acceleration values arevery small erefore the driverrsquos health can be clearlyimproved by using SHM with optimization in the low-frequency region when the vehicle moves and compactson an elastoplastic soil ground
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
03
04Ve
rtic
al ac
cele
ratio
n PS
D (m
2 middotsndash3)
X 3518Y 00018
X 569Y 0031
X 209Y 0321
X 209Y 0264
ndash1776
PHMSHM without optimizationSHM with optimization
(a)
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 3518Y 0015
X 569Y 0019
X 209Y 0182
X 209Y 0121
ndash3352
PHMSHM without optimizationSHM with optimization
(b)
05 1 2 4 8 16 32 64Frequency (Hz)
0
001
002
003
004
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3)
X 569Y 0004
X 249Y 0026
X 3518Y 00035
X 269Y 0012
ndash5385
PHMSHM without optimizationSHM with optimization
(c)
Figure 11 Results of the PSD acceleration responses under a high excitation frequency 35Hz of the drum (a) Vertical driverrsquos seat (b)Cabrsquos pitch angle (c) Cabrsquos roll angle
12 Shock and Vibration
45 46 47 48 49 50ndash2
ndash1
0
1
2
Time (s)
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(a)
45 46 47 48 49 50Time (s)
ndash1
ndash05
0
05
1
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(b)
45 46 47 48 49 50Time (s)
ndash01
ndash005
0
005
01
Roll
acce
lera
tion
(rad
middotsndash2)
PHMSHM without optimizationSHM with optimization
(c)
Figure 12 Results of the acceleration responses under a low excitation frequency 28Hz of the drum (a) Vertical driverrsquos seat (b) Cabrsquospitch angle (c) Cabrsquos roll angle
45 46 47 48 49 50Time (s)
ndash2
ndash1
0
1
2
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(a)
45 46 47 48 49 50Time (s)
ndash1
ndash05
0
05
1
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(b)
Figure 13 Continued
Shock and Vibration 13
e simulation results in Figures 12 and 13 also showthat the acceleration responses of the vertical driverrsquos seatcabrsquos pitch and roll vibrations of SHM with optimizationare lower than both PHM and SHM without optimizationBesides the values of the weighted RMS accelerationresponses are also listed in Tables 3 and 4 e weightedRMS values of the vertical driverrsquos seat cabrsquos pitch androll vibrations of SHM with optimization are greatly re-duced in comparison with SHM by 3516 4829 and3765 under a low excitation frequency 28 Hz of thedrum and by 2480 4315 and 3606 under a highexcitation frequency 35 Hz of the drum respectivelyConsequently the above analysis results also indicate thatthe driverrsquos ride comfort and health are strongly improvedby SHM with optimization when the vehicle moves andcompacts on the high elastoplastic soil ground under boththe lowhigh excitation frequency 2835 Hz of the vi-bratory drum
5 Conclusions
Modeling and low-frequency performance analysis of semi-active cabrsquos hydraulic mounts of the off-road vibratory rollerare addressed in this work e comparison between thesimulation and test results of passive cabrsquos isolation mounts
is also carried out e low-frequency performance of SHMusing the optimal fuzzy-PID controller is then evaluatedthrough the PSD acceleration and weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibrations inboth the frequency and time domains e results aresummarized as follows
(1) In the condition of the vehicle traveling the weightedRMS acceleration responses and the PSD accelera-tion responses of the vertical driverrsquos seat cabrsquos pitchand roll vibrations of SHM with optimization arelower than both PHM and SHM without optimi-zation Particularly the weighted RMS values ofSHM with optimization are strongly reduced incomparison with PHM by 3499 4256 and4172 respectively
(2) In condition of the vehicle working both PSD ac-celeration responses and the weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibra-tions of SHM using the optimal fuzzy-PID controllerare clearly smaller comparable with both PHM andSHM without optimization under both lowhighexcitation frequency 2835Hz of the drum on thehigh elastoplastic soil ground Especially the maxi-mum PSD values of the vertical driverrsquos seat cabrsquos
45 46 47 48 49 50Time (s)
ndash01
ndash005
0
005
01
Roll
acce
lera
tion
(rad
middotsndash2)
PHMSHM without optimizationSHM with optimization
(c)
Figure 13 Results of the acceleration responses under a high excitation frequency 35Hz of the drum (a) Vertical driverrsquos seat (b) Cabrsquospitch angle (c) Cabrsquos roll angle
Table 3 e weighted RMS values under a low excitation frequency 28Hz of the drum
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 0657 0501 0426 3516awϕc (radmiddotsminus2) 0323 0184 0167 4829awθc (radmiddotsminus2) 0085 0056 0053 3765
Table 4 e weighted RMS values under a high excitation frequency 35Hz of the drum
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 0512 0453 0385 2480awϕc (radmiddotsminus2) 0241 0162 0137 4315awθc (radmiddotsminus2) 0061 0040 0039 3606
14 Shock and Vibration
pitch and roll vibrations of SHM with optimizationare strongly reduced by 2446 3147 and 5937in comparison with PHM when the vehicle compactsat a low excitation frequency 28Hz of the drum
(3) e above analysis results indicate that the low-frequency and high-stiffness characteristics of SHMusing the optimal fuzzy-PID controller have the besteffect on isolating low-frequency vibration trans-mitted and controlling the cab shaking under variousoperating conditions of the off-road vibratory roller
Data Availability
e data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] V Liem J Zhang V Quynh and R Jiao ldquoVibration analysisand modeling of an off-road vibratory roller equipped withthree different cabrsquos isolation mountsrdquo Shock and Vibrationvol 2018 Article ID 8527574 17 pages 2018
[2] D Adam and F Kopf ldquoeoretical analysis of dynamicallyloaded soilsrdquo in Proceedings of the European WorkshopCompaction of Soils and Granular Materials pp 207ndash217Paris France 2000
[3] J Li Z Zhang H Xu and Z Feng ldquoDynamic characteristicsof the vibratory roller test-bed vibration isolation systemsimulation and experimentrdquo Journal of Terramechanicsvol 56 pp 139ndash156 2014
[4] J Paul and A Michael ldquoCapturing nonlinear vibratory rollercompactor behavior through lumped parameter modelingrdquoJournal of Engineering Mechanics vol 134 no 8 pp 684ndash6932008
[5] X Zhang Modelling simulation and optimization of ridecomfort for off road articulated dump trucks PhD thesisSoutheast University Nanjing China 2010
[6] A Pakowski and D Cao ldquoEffect of soil deformability on off-road vehicle ride dynamicsrdquo SAE International Journal ofCommercial Vehicles vol 6 no 2 pp 362ndash371 2013
[7] R A Irani R J Bauer and A Warkentin ldquoDynamic wheel-soil model for lightweight mobile robots with smooth wheelsrdquoJournal of Intelligent amp Robotic Systems vol 71 no 2pp 179ndash193 2013
[8] S Park A A Popov and D J Cole ldquoInfluence of soil de-formation on off-road heavy vehicle suspension vibrationrdquoJournal of Terramechanics vol 41 no 1 pp 41ndash68 2004
[9] A Kordestani S Rakheja P Marcotte A Pazooki andD Juras ldquoAnalysis of ride vibration environment of soilcompactorsrdquo SAE International Journal of Commercial Ve-hicles vol 3 no 1 pp 259ndash272 2010
[10] V Quynh Vibration study and control for cab of vibratoryroller PhD thesis Southeast University Nanjing China2013
[11] M Griffin Handbook of Human Vibration Academic PressLondon UK 1990
[12] International Organization for Standardization ldquoMechanicalvibration and shock-evaluation of human exposure to wholebody vibration-part 2 general requirementsrdquo Tech Rep ISO2631-11997 ISO Geneva Switzerland 1997
[13] S Yildirim ldquoVibration control of suspension systems using aproposed neural networkrdquo Journal of Sound and Vibrationvol 277 no 4-5 pp 1059ndash1069 2004
[14] N Ebrahimi and A Gharaveisi ldquoOptimal fuzzy supervisorcontroller for an active suspension systemrdquo InternationalJournal of Soft Computing amp Engineering vol 2 no 4pp 36ndash39 2012
[15] Z Xie P Wong J Zhao T Xu and I Wong ldquoA noise-insensitive semi-active air suspension for heavy-duty vehicleswith an integrated fuzzy-wheelbase preview controlrdquo Math-ematical Problem in Engineering vol 2013 Article ID 12195312 pages 2013
[16] B Kasemi A G A Muthalif M M Rashid and S FathimaldquoFuzzy-PID controller for semi-active vibration control usingmagnetorheological fluid damperrdquo Procedia Engineeringvol 41 pp 1221ndash1227 2012
[17] T Nguyen A novel semi-active magnetorheological mount forvibration isolation PhD thesis e University of ToledoToledo OH USA 2009
[18] A Muthalif B Kasemi D Nordin and M Rashid ldquoSemi-active vibration control using experimental model of Mag-netorheological damper with adaptive fuzzy-PID controllerrdquoSmart Structures and Systems vol 20 no 1 pp 85ndash97 2017
[19] S D Nguyen Q H Nguyen and S-B Choi ldquoA hybridclustering based fuzzy structure for vibration control-part 2an application to semi-active vehicle seat-suspension systemrdquoMechanical Systems and Signal Processing vol 56-57pp 288ndash301 2015
[20] W Wang Y Song Y Xue H Jin J Hou and M Zhao ldquoAnoptimal vibration control strategy for a vehiclersquos active sus-pension based on improved cultural algorithmrdquo Applied SoftComputing vol 28 pp 167ndash174 2015
[21] Y Chen Z Wang J Qiu and Z Huang ldquoHybrid fuzzyskyhook surface control using multi-objective microgeneticalgorithm for semi-active vehicle suspension system ridecomfort stability analysisrdquo Journal of Dynamic SystemsMeasurement amp Control vol 134 no 4 pp 1ndash14 2012
[22] International Organization for Standardization ldquoReportingvehicle road surface irregularitiesrdquo Tech Rep ISOTC108SC2WG4 N57 ieme Medical Publishers Stuttgart Germany1982
[23] M Mitschke Dynamik der Kraftfahrzeuge Springer-VerlagBerlin Germany 1972
[24] M Rahmat ldquoApplication of selftuning fuzzy PID controlleron industrial hydraulic actuator using system identificationapproachrdquo International Journal on Smart Sensing amp In-telligent Systems vol 2 no 2 pp 246ndash261 2009
[25] E H Mamdani and S Assilian ldquoAn experiment in linguisticsynthesis with a fuzzy logic controllerrdquo International Journalof Man-Machine Studies vol 7 no 1 pp 1ndash13 1975
[26] Z Nariman M Salehpour A Jamali and E HanghgooldquoPareto optimization of a five-degree of freedom vehicle vi-bration model using a MUGArdquo Engineering Applications ofArtificial Intelligence vol 23 no 4 pp 543ndash551 2010
[27] H John G Michael and D Gregory ldquoMulti-objective controloptimization for semi-active vehicle suspensionsrdquo Journal ofSound and Vibration vol 330 pp 5502ndash5516 2011
[28] J Y Wong ldquoData processing methodology in the charac-terization of the mechanical properties of terrainrdquo Journal ofTerramechanics vol 17 no 1 pp 13ndash41 1980
Shock and Vibration 15
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

PHMSHM without optimizationSHM with optimization
ndash03
ndash02
ndash01
0
01
02
03
Roll
acce
lera
tion
(rad
middotsndash2)
45 46 47 48 49 50Time (s)
(c)
Figure 9 Results of the acceleration responses on the deformable terrain (a) Vertical driverrsquos seat (b) Cabrsquos pitch angle (c) Cabrsquos roll angle
05 1 2 4 8 16 32 640
01
02
03
04
X 569Y 0074
Frequency (Hz)
Vert
ical
acce
lera
tion
PSD
(m2 middotsndash3
)
X 2818Y 0014
X 209Y 0376 ndash2446
PHMSHM without optimizationSHM with optimization
X 209Y 0284
(a)
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
X 2818Y 0033
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 569Y 0045
X 209Y 0197
X 209Y 0135
ndash3147
PHMSHM without optimizationSHM with optimization
(b)
05 1 2 4 8 16 32 64Frequency (Hz)
0
001
002
003
004
X 2818Y 0008
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3) X 249
Y 0032
X 269Y 0013 X 569
Y 0011
ndash5937
PHMSHM without optimizationSHM with optimization
(c)
Figure 10 Results of the PSD acceleration responses under a low excitation frequency 28Hz of the drum (a) Vertical driverrsquos seat (b)Cabrsquos pitch angle (c) Cabrsquos roll angle
Shock and Vibration 11
parameters of the high elastoplastic soil ground includesε 087 ksp 283times106Nmiddotmminus1 kse 423times106Nmiddotmminus1 andcse 371times 103Nsmiddotmminus1
e comparison results of the PSD acceleration responsesof the vertical driverrsquos seat cabrsquos pitch and roll vibrations withthe cabrsquos isolation systems at a lowhigh excitation frequency2835Hz of the vibratory drum are seen in Figures 10 and 11Similarly in the condition of the vehicle traveling the res-onance frequencies of PSD acceleration responses of thevertical driverrsquos seat cabrsquos pitch and roll vibrations of SHMwithout optimization and SHM with optimization are alsounchanged in comparison with PHM e simulation resultsalso show that the resonance frequencies of SHM withoutoptimization and SHMwith optimization also occur at 28183518Hz comparable with PHM in all three directions iscan be due to the effect of the resonance at a lowhigh ex-citation frequency 2835Hz of the vibratory drum In ad-dition the resonance frequency of the acceleration PSDresponses of all cabrsquos isolation systems clearly appears at569Hz in both graphs of Figures 10 and 11 whereas thisresonance frequency does not occur in the graph of Figure 8
is particularity may be due to the effect of the soil stiffnesswith the high-density soil ground
Besides at a low-frequency range below 4Hz themaximum resonance peaks of the PSD acceleration re-sponses of the vertical driverrsquos seat cabrsquos pitch and rollvibrations of SHMwith optimization are strongly reduced incomparison with PHM by 2446 3147 and 5937 at alow excitation frequency 28Hz of the drum and by 17763352 and 5385 at a high excitation frequency 35Hz ofthe drum respectively is is also due to the main impact ofthe semi-active damping force of hydraulic mountfd ch| _z| _z + u Contrarily at a frequency range upper 4Hzthe PSD acceleration responses of the vertical driverrsquos seatcabrsquos pitch and roll vibrations of SHMwithout optimizationand SHM with optimization are slightly increased incomparison with PHM especially at the resonance fre-quency of 569Hz However the PSD acceleration values arevery small erefore the driverrsquos health can be clearlyimproved by using SHM with optimization in the low-frequency region when the vehicle moves and compactson an elastoplastic soil ground
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
03
04Ve
rtic
al ac
cele
ratio
n PS
D (m
2 middotsndash3)
X 3518Y 00018
X 569Y 0031
X 209Y 0321
X 209Y 0264
ndash1776
PHMSHM without optimizationSHM with optimization
(a)
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 3518Y 0015
X 569Y 0019
X 209Y 0182
X 209Y 0121
ndash3352
PHMSHM without optimizationSHM with optimization
(b)
05 1 2 4 8 16 32 64Frequency (Hz)
0
001
002
003
004
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3)
X 569Y 0004
X 249Y 0026
X 3518Y 00035
X 269Y 0012
ndash5385
PHMSHM without optimizationSHM with optimization
(c)
Figure 11 Results of the PSD acceleration responses under a high excitation frequency 35Hz of the drum (a) Vertical driverrsquos seat (b)Cabrsquos pitch angle (c) Cabrsquos roll angle
12 Shock and Vibration
45 46 47 48 49 50ndash2
ndash1
0
1
2
Time (s)
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(a)
45 46 47 48 49 50Time (s)
ndash1
ndash05
0
05
1
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(b)
45 46 47 48 49 50Time (s)
ndash01
ndash005
0
005
01
Roll
acce
lera
tion
(rad
middotsndash2)
PHMSHM without optimizationSHM with optimization
(c)
Figure 12 Results of the acceleration responses under a low excitation frequency 28Hz of the drum (a) Vertical driverrsquos seat (b) Cabrsquospitch angle (c) Cabrsquos roll angle
45 46 47 48 49 50Time (s)
ndash2
ndash1
0
1
2
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(a)
45 46 47 48 49 50Time (s)
ndash1
ndash05
0
05
1
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(b)
Figure 13 Continued
Shock and Vibration 13
e simulation results in Figures 12 and 13 also showthat the acceleration responses of the vertical driverrsquos seatcabrsquos pitch and roll vibrations of SHM with optimizationare lower than both PHM and SHM without optimizationBesides the values of the weighted RMS accelerationresponses are also listed in Tables 3 and 4 e weightedRMS values of the vertical driverrsquos seat cabrsquos pitch androll vibrations of SHM with optimization are greatly re-duced in comparison with SHM by 3516 4829 and3765 under a low excitation frequency 28 Hz of thedrum and by 2480 4315 and 3606 under a highexcitation frequency 35 Hz of the drum respectivelyConsequently the above analysis results also indicate thatthe driverrsquos ride comfort and health are strongly improvedby SHM with optimization when the vehicle moves andcompacts on the high elastoplastic soil ground under boththe lowhigh excitation frequency 2835 Hz of the vi-bratory drum
5 Conclusions
Modeling and low-frequency performance analysis of semi-active cabrsquos hydraulic mounts of the off-road vibratory rollerare addressed in this work e comparison between thesimulation and test results of passive cabrsquos isolation mounts
is also carried out e low-frequency performance of SHMusing the optimal fuzzy-PID controller is then evaluatedthrough the PSD acceleration and weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibrations inboth the frequency and time domains e results aresummarized as follows
(1) In the condition of the vehicle traveling the weightedRMS acceleration responses and the PSD accelera-tion responses of the vertical driverrsquos seat cabrsquos pitchand roll vibrations of SHM with optimization arelower than both PHM and SHM without optimi-zation Particularly the weighted RMS values ofSHM with optimization are strongly reduced incomparison with PHM by 3499 4256 and4172 respectively
(2) In condition of the vehicle working both PSD ac-celeration responses and the weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibra-tions of SHM using the optimal fuzzy-PID controllerare clearly smaller comparable with both PHM andSHM without optimization under both lowhighexcitation frequency 2835Hz of the drum on thehigh elastoplastic soil ground Especially the maxi-mum PSD values of the vertical driverrsquos seat cabrsquos
45 46 47 48 49 50Time (s)
ndash01
ndash005
0
005
01
Roll
acce
lera
tion
(rad
middotsndash2)
PHMSHM without optimizationSHM with optimization
(c)
Figure 13 Results of the acceleration responses under a high excitation frequency 35Hz of the drum (a) Vertical driverrsquos seat (b) Cabrsquospitch angle (c) Cabrsquos roll angle
Table 3 e weighted RMS values under a low excitation frequency 28Hz of the drum
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 0657 0501 0426 3516awϕc (radmiddotsminus2) 0323 0184 0167 4829awθc (radmiddotsminus2) 0085 0056 0053 3765
Table 4 e weighted RMS values under a high excitation frequency 35Hz of the drum
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 0512 0453 0385 2480awϕc (radmiddotsminus2) 0241 0162 0137 4315awθc (radmiddotsminus2) 0061 0040 0039 3606
14 Shock and Vibration
pitch and roll vibrations of SHM with optimizationare strongly reduced by 2446 3147 and 5937in comparison with PHM when the vehicle compactsat a low excitation frequency 28Hz of the drum
(3) e above analysis results indicate that the low-frequency and high-stiffness characteristics of SHMusing the optimal fuzzy-PID controller have the besteffect on isolating low-frequency vibration trans-mitted and controlling the cab shaking under variousoperating conditions of the off-road vibratory roller
Data Availability
e data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] V Liem J Zhang V Quynh and R Jiao ldquoVibration analysisand modeling of an off-road vibratory roller equipped withthree different cabrsquos isolation mountsrdquo Shock and Vibrationvol 2018 Article ID 8527574 17 pages 2018
[2] D Adam and F Kopf ldquoeoretical analysis of dynamicallyloaded soilsrdquo in Proceedings of the European WorkshopCompaction of Soils and Granular Materials pp 207ndash217Paris France 2000
[3] J Li Z Zhang H Xu and Z Feng ldquoDynamic characteristicsof the vibratory roller test-bed vibration isolation systemsimulation and experimentrdquo Journal of Terramechanicsvol 56 pp 139ndash156 2014
[4] J Paul and A Michael ldquoCapturing nonlinear vibratory rollercompactor behavior through lumped parameter modelingrdquoJournal of Engineering Mechanics vol 134 no 8 pp 684ndash6932008
[5] X Zhang Modelling simulation and optimization of ridecomfort for off road articulated dump trucks PhD thesisSoutheast University Nanjing China 2010
[6] A Pakowski and D Cao ldquoEffect of soil deformability on off-road vehicle ride dynamicsrdquo SAE International Journal ofCommercial Vehicles vol 6 no 2 pp 362ndash371 2013
[7] R A Irani R J Bauer and A Warkentin ldquoDynamic wheel-soil model for lightweight mobile robots with smooth wheelsrdquoJournal of Intelligent amp Robotic Systems vol 71 no 2pp 179ndash193 2013
[8] S Park A A Popov and D J Cole ldquoInfluence of soil de-formation on off-road heavy vehicle suspension vibrationrdquoJournal of Terramechanics vol 41 no 1 pp 41ndash68 2004
[9] A Kordestani S Rakheja P Marcotte A Pazooki andD Juras ldquoAnalysis of ride vibration environment of soilcompactorsrdquo SAE International Journal of Commercial Ve-hicles vol 3 no 1 pp 259ndash272 2010
[10] V Quynh Vibration study and control for cab of vibratoryroller PhD thesis Southeast University Nanjing China2013
[11] M Griffin Handbook of Human Vibration Academic PressLondon UK 1990
[12] International Organization for Standardization ldquoMechanicalvibration and shock-evaluation of human exposure to wholebody vibration-part 2 general requirementsrdquo Tech Rep ISO2631-11997 ISO Geneva Switzerland 1997
[13] S Yildirim ldquoVibration control of suspension systems using aproposed neural networkrdquo Journal of Sound and Vibrationvol 277 no 4-5 pp 1059ndash1069 2004
[14] N Ebrahimi and A Gharaveisi ldquoOptimal fuzzy supervisorcontroller for an active suspension systemrdquo InternationalJournal of Soft Computing amp Engineering vol 2 no 4pp 36ndash39 2012
[15] Z Xie P Wong J Zhao T Xu and I Wong ldquoA noise-insensitive semi-active air suspension for heavy-duty vehicleswith an integrated fuzzy-wheelbase preview controlrdquo Math-ematical Problem in Engineering vol 2013 Article ID 12195312 pages 2013
[16] B Kasemi A G A Muthalif M M Rashid and S FathimaldquoFuzzy-PID controller for semi-active vibration control usingmagnetorheological fluid damperrdquo Procedia Engineeringvol 41 pp 1221ndash1227 2012
[17] T Nguyen A novel semi-active magnetorheological mount forvibration isolation PhD thesis e University of ToledoToledo OH USA 2009
[18] A Muthalif B Kasemi D Nordin and M Rashid ldquoSemi-active vibration control using experimental model of Mag-netorheological damper with adaptive fuzzy-PID controllerrdquoSmart Structures and Systems vol 20 no 1 pp 85ndash97 2017
[19] S D Nguyen Q H Nguyen and S-B Choi ldquoA hybridclustering based fuzzy structure for vibration control-part 2an application to semi-active vehicle seat-suspension systemrdquoMechanical Systems and Signal Processing vol 56-57pp 288ndash301 2015
[20] W Wang Y Song Y Xue H Jin J Hou and M Zhao ldquoAnoptimal vibration control strategy for a vehiclersquos active sus-pension based on improved cultural algorithmrdquo Applied SoftComputing vol 28 pp 167ndash174 2015
[21] Y Chen Z Wang J Qiu and Z Huang ldquoHybrid fuzzyskyhook surface control using multi-objective microgeneticalgorithm for semi-active vehicle suspension system ridecomfort stability analysisrdquo Journal of Dynamic SystemsMeasurement amp Control vol 134 no 4 pp 1ndash14 2012
[22] International Organization for Standardization ldquoReportingvehicle road surface irregularitiesrdquo Tech Rep ISOTC108SC2WG4 N57 ieme Medical Publishers Stuttgart Germany1982
[23] M Mitschke Dynamik der Kraftfahrzeuge Springer-VerlagBerlin Germany 1972
[24] M Rahmat ldquoApplication of selftuning fuzzy PID controlleron industrial hydraulic actuator using system identificationapproachrdquo International Journal on Smart Sensing amp In-telligent Systems vol 2 no 2 pp 246ndash261 2009
[25] E H Mamdani and S Assilian ldquoAn experiment in linguisticsynthesis with a fuzzy logic controllerrdquo International Journalof Man-Machine Studies vol 7 no 1 pp 1ndash13 1975
[26] Z Nariman M Salehpour A Jamali and E HanghgooldquoPareto optimization of a five-degree of freedom vehicle vi-bration model using a MUGArdquo Engineering Applications ofArtificial Intelligence vol 23 no 4 pp 543ndash551 2010
[27] H John G Michael and D Gregory ldquoMulti-objective controloptimization for semi-active vehicle suspensionsrdquo Journal ofSound and Vibration vol 330 pp 5502ndash5516 2011
[28] J Y Wong ldquoData processing methodology in the charac-terization of the mechanical properties of terrainrdquo Journal ofTerramechanics vol 17 no 1 pp 13ndash41 1980
Shock and Vibration 15
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

parameters of the high elastoplastic soil ground includesε 087 ksp 283times106Nmiddotmminus1 kse 423times106Nmiddotmminus1 andcse 371times 103Nsmiddotmminus1
e comparison results of the PSD acceleration responsesof the vertical driverrsquos seat cabrsquos pitch and roll vibrations withthe cabrsquos isolation systems at a lowhigh excitation frequency2835Hz of the vibratory drum are seen in Figures 10 and 11Similarly in the condition of the vehicle traveling the res-onance frequencies of PSD acceleration responses of thevertical driverrsquos seat cabrsquos pitch and roll vibrations of SHMwithout optimization and SHM with optimization are alsounchanged in comparison with PHM e simulation resultsalso show that the resonance frequencies of SHM withoutoptimization and SHMwith optimization also occur at 28183518Hz comparable with PHM in all three directions iscan be due to the effect of the resonance at a lowhigh ex-citation frequency 2835Hz of the vibratory drum In ad-dition the resonance frequency of the acceleration PSDresponses of all cabrsquos isolation systems clearly appears at569Hz in both graphs of Figures 10 and 11 whereas thisresonance frequency does not occur in the graph of Figure 8
is particularity may be due to the effect of the soil stiffnesswith the high-density soil ground
Besides at a low-frequency range below 4Hz themaximum resonance peaks of the PSD acceleration re-sponses of the vertical driverrsquos seat cabrsquos pitch and rollvibrations of SHMwith optimization are strongly reduced incomparison with PHM by 2446 3147 and 5937 at alow excitation frequency 28Hz of the drum and by 17763352 and 5385 at a high excitation frequency 35Hz ofthe drum respectively is is also due to the main impact ofthe semi-active damping force of hydraulic mountfd ch| _z| _z + u Contrarily at a frequency range upper 4Hzthe PSD acceleration responses of the vertical driverrsquos seatcabrsquos pitch and roll vibrations of SHMwithout optimizationand SHM with optimization are slightly increased incomparison with PHM especially at the resonance fre-quency of 569Hz However the PSD acceleration values arevery small erefore the driverrsquos health can be clearlyimproved by using SHM with optimization in the low-frequency region when the vehicle moves and compactson an elastoplastic soil ground
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
03
04Ve
rtic
al ac
cele
ratio
n PS
D (m
2 middotsndash3)
X 3518Y 00018
X 569Y 0031
X 209Y 0321
X 209Y 0264
ndash1776
PHMSHM without optimizationSHM with optimization
(a)
05 1 2 4 8 16 32 64Frequency (Hz)
0
01
02
Pitc
h ac
cele
ratio
n PS
D (r
ad2 middotsndash3
)
X 3518Y 0015
X 569Y 0019
X 209Y 0182
X 209Y 0121
ndash3352
PHMSHM without optimizationSHM with optimization
(b)
05 1 2 4 8 16 32 64Frequency (Hz)
0
001
002
003
004
Roll
acce
lera
tion
PSD
(rad
2 middotsndash3)
X 569Y 0004
X 249Y 0026
X 3518Y 00035
X 269Y 0012
ndash5385
PHMSHM without optimizationSHM with optimization
(c)
Figure 11 Results of the PSD acceleration responses under a high excitation frequency 35Hz of the drum (a) Vertical driverrsquos seat (b)Cabrsquos pitch angle (c) Cabrsquos roll angle
12 Shock and Vibration
45 46 47 48 49 50ndash2
ndash1
0
1
2
Time (s)
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(a)
45 46 47 48 49 50Time (s)
ndash1
ndash05
0
05
1
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(b)
45 46 47 48 49 50Time (s)
ndash01
ndash005
0
005
01
Roll
acce
lera
tion
(rad
middotsndash2)
PHMSHM without optimizationSHM with optimization
(c)
Figure 12 Results of the acceleration responses under a low excitation frequency 28Hz of the drum (a) Vertical driverrsquos seat (b) Cabrsquospitch angle (c) Cabrsquos roll angle
45 46 47 48 49 50Time (s)
ndash2
ndash1
0
1
2
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(a)
45 46 47 48 49 50Time (s)
ndash1
ndash05
0
05
1
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(b)
Figure 13 Continued
Shock and Vibration 13
e simulation results in Figures 12 and 13 also showthat the acceleration responses of the vertical driverrsquos seatcabrsquos pitch and roll vibrations of SHM with optimizationare lower than both PHM and SHM without optimizationBesides the values of the weighted RMS accelerationresponses are also listed in Tables 3 and 4 e weightedRMS values of the vertical driverrsquos seat cabrsquos pitch androll vibrations of SHM with optimization are greatly re-duced in comparison with SHM by 3516 4829 and3765 under a low excitation frequency 28 Hz of thedrum and by 2480 4315 and 3606 under a highexcitation frequency 35 Hz of the drum respectivelyConsequently the above analysis results also indicate thatthe driverrsquos ride comfort and health are strongly improvedby SHM with optimization when the vehicle moves andcompacts on the high elastoplastic soil ground under boththe lowhigh excitation frequency 2835 Hz of the vi-bratory drum
5 Conclusions
Modeling and low-frequency performance analysis of semi-active cabrsquos hydraulic mounts of the off-road vibratory rollerare addressed in this work e comparison between thesimulation and test results of passive cabrsquos isolation mounts
is also carried out e low-frequency performance of SHMusing the optimal fuzzy-PID controller is then evaluatedthrough the PSD acceleration and weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibrations inboth the frequency and time domains e results aresummarized as follows
(1) In the condition of the vehicle traveling the weightedRMS acceleration responses and the PSD accelera-tion responses of the vertical driverrsquos seat cabrsquos pitchand roll vibrations of SHM with optimization arelower than both PHM and SHM without optimi-zation Particularly the weighted RMS values ofSHM with optimization are strongly reduced incomparison with PHM by 3499 4256 and4172 respectively
(2) In condition of the vehicle working both PSD ac-celeration responses and the weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibra-tions of SHM using the optimal fuzzy-PID controllerare clearly smaller comparable with both PHM andSHM without optimization under both lowhighexcitation frequency 2835Hz of the drum on thehigh elastoplastic soil ground Especially the maxi-mum PSD values of the vertical driverrsquos seat cabrsquos
45 46 47 48 49 50Time (s)
ndash01
ndash005
0
005
01
Roll
acce
lera
tion
(rad
middotsndash2)
PHMSHM without optimizationSHM with optimization
(c)
Figure 13 Results of the acceleration responses under a high excitation frequency 35Hz of the drum (a) Vertical driverrsquos seat (b) Cabrsquospitch angle (c) Cabrsquos roll angle
Table 3 e weighted RMS values under a low excitation frequency 28Hz of the drum
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 0657 0501 0426 3516awϕc (radmiddotsminus2) 0323 0184 0167 4829awθc (radmiddotsminus2) 0085 0056 0053 3765
Table 4 e weighted RMS values under a high excitation frequency 35Hz of the drum
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 0512 0453 0385 2480awϕc (radmiddotsminus2) 0241 0162 0137 4315awθc (radmiddotsminus2) 0061 0040 0039 3606
14 Shock and Vibration
pitch and roll vibrations of SHM with optimizationare strongly reduced by 2446 3147 and 5937in comparison with PHM when the vehicle compactsat a low excitation frequency 28Hz of the drum
(3) e above analysis results indicate that the low-frequency and high-stiffness characteristics of SHMusing the optimal fuzzy-PID controller have the besteffect on isolating low-frequency vibration trans-mitted and controlling the cab shaking under variousoperating conditions of the off-road vibratory roller
Data Availability
e data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] V Liem J Zhang V Quynh and R Jiao ldquoVibration analysisand modeling of an off-road vibratory roller equipped withthree different cabrsquos isolation mountsrdquo Shock and Vibrationvol 2018 Article ID 8527574 17 pages 2018
[2] D Adam and F Kopf ldquoeoretical analysis of dynamicallyloaded soilsrdquo in Proceedings of the European WorkshopCompaction of Soils and Granular Materials pp 207ndash217Paris France 2000
[3] J Li Z Zhang H Xu and Z Feng ldquoDynamic characteristicsof the vibratory roller test-bed vibration isolation systemsimulation and experimentrdquo Journal of Terramechanicsvol 56 pp 139ndash156 2014
[4] J Paul and A Michael ldquoCapturing nonlinear vibratory rollercompactor behavior through lumped parameter modelingrdquoJournal of Engineering Mechanics vol 134 no 8 pp 684ndash6932008
[5] X Zhang Modelling simulation and optimization of ridecomfort for off road articulated dump trucks PhD thesisSoutheast University Nanjing China 2010
[6] A Pakowski and D Cao ldquoEffect of soil deformability on off-road vehicle ride dynamicsrdquo SAE International Journal ofCommercial Vehicles vol 6 no 2 pp 362ndash371 2013
[7] R A Irani R J Bauer and A Warkentin ldquoDynamic wheel-soil model for lightweight mobile robots with smooth wheelsrdquoJournal of Intelligent amp Robotic Systems vol 71 no 2pp 179ndash193 2013
[8] S Park A A Popov and D J Cole ldquoInfluence of soil de-formation on off-road heavy vehicle suspension vibrationrdquoJournal of Terramechanics vol 41 no 1 pp 41ndash68 2004
[9] A Kordestani S Rakheja P Marcotte A Pazooki andD Juras ldquoAnalysis of ride vibration environment of soilcompactorsrdquo SAE International Journal of Commercial Ve-hicles vol 3 no 1 pp 259ndash272 2010
[10] V Quynh Vibration study and control for cab of vibratoryroller PhD thesis Southeast University Nanjing China2013
[11] M Griffin Handbook of Human Vibration Academic PressLondon UK 1990
[12] International Organization for Standardization ldquoMechanicalvibration and shock-evaluation of human exposure to wholebody vibration-part 2 general requirementsrdquo Tech Rep ISO2631-11997 ISO Geneva Switzerland 1997
[13] S Yildirim ldquoVibration control of suspension systems using aproposed neural networkrdquo Journal of Sound and Vibrationvol 277 no 4-5 pp 1059ndash1069 2004
[14] N Ebrahimi and A Gharaveisi ldquoOptimal fuzzy supervisorcontroller for an active suspension systemrdquo InternationalJournal of Soft Computing amp Engineering vol 2 no 4pp 36ndash39 2012
[15] Z Xie P Wong J Zhao T Xu and I Wong ldquoA noise-insensitive semi-active air suspension for heavy-duty vehicleswith an integrated fuzzy-wheelbase preview controlrdquo Math-ematical Problem in Engineering vol 2013 Article ID 12195312 pages 2013
[16] B Kasemi A G A Muthalif M M Rashid and S FathimaldquoFuzzy-PID controller for semi-active vibration control usingmagnetorheological fluid damperrdquo Procedia Engineeringvol 41 pp 1221ndash1227 2012
[17] T Nguyen A novel semi-active magnetorheological mount forvibration isolation PhD thesis e University of ToledoToledo OH USA 2009
[18] A Muthalif B Kasemi D Nordin and M Rashid ldquoSemi-active vibration control using experimental model of Mag-netorheological damper with adaptive fuzzy-PID controllerrdquoSmart Structures and Systems vol 20 no 1 pp 85ndash97 2017
[19] S D Nguyen Q H Nguyen and S-B Choi ldquoA hybridclustering based fuzzy structure for vibration control-part 2an application to semi-active vehicle seat-suspension systemrdquoMechanical Systems and Signal Processing vol 56-57pp 288ndash301 2015
[20] W Wang Y Song Y Xue H Jin J Hou and M Zhao ldquoAnoptimal vibration control strategy for a vehiclersquos active sus-pension based on improved cultural algorithmrdquo Applied SoftComputing vol 28 pp 167ndash174 2015
[21] Y Chen Z Wang J Qiu and Z Huang ldquoHybrid fuzzyskyhook surface control using multi-objective microgeneticalgorithm for semi-active vehicle suspension system ridecomfort stability analysisrdquo Journal of Dynamic SystemsMeasurement amp Control vol 134 no 4 pp 1ndash14 2012
[22] International Organization for Standardization ldquoReportingvehicle road surface irregularitiesrdquo Tech Rep ISOTC108SC2WG4 N57 ieme Medical Publishers Stuttgart Germany1982
[23] M Mitschke Dynamik der Kraftfahrzeuge Springer-VerlagBerlin Germany 1972
[24] M Rahmat ldquoApplication of selftuning fuzzy PID controlleron industrial hydraulic actuator using system identificationapproachrdquo International Journal on Smart Sensing amp In-telligent Systems vol 2 no 2 pp 246ndash261 2009
[25] E H Mamdani and S Assilian ldquoAn experiment in linguisticsynthesis with a fuzzy logic controllerrdquo International Journalof Man-Machine Studies vol 7 no 1 pp 1ndash13 1975
[26] Z Nariman M Salehpour A Jamali and E HanghgooldquoPareto optimization of a five-degree of freedom vehicle vi-bration model using a MUGArdquo Engineering Applications ofArtificial Intelligence vol 23 no 4 pp 543ndash551 2010
[27] H John G Michael and D Gregory ldquoMulti-objective controloptimization for semi-active vehicle suspensionsrdquo Journal ofSound and Vibration vol 330 pp 5502ndash5516 2011
[28] J Y Wong ldquoData processing methodology in the charac-terization of the mechanical properties of terrainrdquo Journal ofTerramechanics vol 17 no 1 pp 13ndash41 1980
Shock and Vibration 15
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

45 46 47 48 49 50ndash2
ndash1
0
1
2
Time (s)
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(a)
45 46 47 48 49 50Time (s)
ndash1
ndash05
0
05
1
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(b)
45 46 47 48 49 50Time (s)
ndash01
ndash005
0
005
01
Roll
acce
lera
tion
(rad
middotsndash2)
PHMSHM without optimizationSHM with optimization
(c)
Figure 12 Results of the acceleration responses under a low excitation frequency 28Hz of the drum (a) Vertical driverrsquos seat (b) Cabrsquospitch angle (c) Cabrsquos roll angle
45 46 47 48 49 50Time (s)
ndash2
ndash1
0
1
2
Vert
ical
acce
lera
tion
(mmiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(a)
45 46 47 48 49 50Time (s)
ndash1
ndash05
0
05
1
Pitc
h ac
cele
ratio
n (r
admiddotsndash2
)
PHMSHM without optimizationSHM with optimization
(b)
Figure 13 Continued
Shock and Vibration 13
e simulation results in Figures 12 and 13 also showthat the acceleration responses of the vertical driverrsquos seatcabrsquos pitch and roll vibrations of SHM with optimizationare lower than both PHM and SHM without optimizationBesides the values of the weighted RMS accelerationresponses are also listed in Tables 3 and 4 e weightedRMS values of the vertical driverrsquos seat cabrsquos pitch androll vibrations of SHM with optimization are greatly re-duced in comparison with SHM by 3516 4829 and3765 under a low excitation frequency 28 Hz of thedrum and by 2480 4315 and 3606 under a highexcitation frequency 35 Hz of the drum respectivelyConsequently the above analysis results also indicate thatthe driverrsquos ride comfort and health are strongly improvedby SHM with optimization when the vehicle moves andcompacts on the high elastoplastic soil ground under boththe lowhigh excitation frequency 2835 Hz of the vi-bratory drum
5 Conclusions
Modeling and low-frequency performance analysis of semi-active cabrsquos hydraulic mounts of the off-road vibratory rollerare addressed in this work e comparison between thesimulation and test results of passive cabrsquos isolation mounts
is also carried out e low-frequency performance of SHMusing the optimal fuzzy-PID controller is then evaluatedthrough the PSD acceleration and weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibrations inboth the frequency and time domains e results aresummarized as follows
(1) In the condition of the vehicle traveling the weightedRMS acceleration responses and the PSD accelera-tion responses of the vertical driverrsquos seat cabrsquos pitchand roll vibrations of SHM with optimization arelower than both PHM and SHM without optimi-zation Particularly the weighted RMS values ofSHM with optimization are strongly reduced incomparison with PHM by 3499 4256 and4172 respectively
(2) In condition of the vehicle working both PSD ac-celeration responses and the weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibra-tions of SHM using the optimal fuzzy-PID controllerare clearly smaller comparable with both PHM andSHM without optimization under both lowhighexcitation frequency 2835Hz of the drum on thehigh elastoplastic soil ground Especially the maxi-mum PSD values of the vertical driverrsquos seat cabrsquos
45 46 47 48 49 50Time (s)
ndash01
ndash005
0
005
01
Roll
acce
lera
tion
(rad
middotsndash2)
PHMSHM without optimizationSHM with optimization
(c)
Figure 13 Results of the acceleration responses under a high excitation frequency 35Hz of the drum (a) Vertical driverrsquos seat (b) Cabrsquospitch angle (c) Cabrsquos roll angle
Table 3 e weighted RMS values under a low excitation frequency 28Hz of the drum
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 0657 0501 0426 3516awϕc (radmiddotsminus2) 0323 0184 0167 4829awθc (radmiddotsminus2) 0085 0056 0053 3765
Table 4 e weighted RMS values under a high excitation frequency 35Hz of the drum
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 0512 0453 0385 2480awϕc (radmiddotsminus2) 0241 0162 0137 4315awθc (radmiddotsminus2) 0061 0040 0039 3606
14 Shock and Vibration
pitch and roll vibrations of SHM with optimizationare strongly reduced by 2446 3147 and 5937in comparison with PHM when the vehicle compactsat a low excitation frequency 28Hz of the drum
(3) e above analysis results indicate that the low-frequency and high-stiffness characteristics of SHMusing the optimal fuzzy-PID controller have the besteffect on isolating low-frequency vibration trans-mitted and controlling the cab shaking under variousoperating conditions of the off-road vibratory roller
Data Availability
e data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] V Liem J Zhang V Quynh and R Jiao ldquoVibration analysisand modeling of an off-road vibratory roller equipped withthree different cabrsquos isolation mountsrdquo Shock and Vibrationvol 2018 Article ID 8527574 17 pages 2018
[2] D Adam and F Kopf ldquoeoretical analysis of dynamicallyloaded soilsrdquo in Proceedings of the European WorkshopCompaction of Soils and Granular Materials pp 207ndash217Paris France 2000
[3] J Li Z Zhang H Xu and Z Feng ldquoDynamic characteristicsof the vibratory roller test-bed vibration isolation systemsimulation and experimentrdquo Journal of Terramechanicsvol 56 pp 139ndash156 2014
[4] J Paul and A Michael ldquoCapturing nonlinear vibratory rollercompactor behavior through lumped parameter modelingrdquoJournal of Engineering Mechanics vol 134 no 8 pp 684ndash6932008
[5] X Zhang Modelling simulation and optimization of ridecomfort for off road articulated dump trucks PhD thesisSoutheast University Nanjing China 2010
[6] A Pakowski and D Cao ldquoEffect of soil deformability on off-road vehicle ride dynamicsrdquo SAE International Journal ofCommercial Vehicles vol 6 no 2 pp 362ndash371 2013
[7] R A Irani R J Bauer and A Warkentin ldquoDynamic wheel-soil model for lightweight mobile robots with smooth wheelsrdquoJournal of Intelligent amp Robotic Systems vol 71 no 2pp 179ndash193 2013
[8] S Park A A Popov and D J Cole ldquoInfluence of soil de-formation on off-road heavy vehicle suspension vibrationrdquoJournal of Terramechanics vol 41 no 1 pp 41ndash68 2004
[9] A Kordestani S Rakheja P Marcotte A Pazooki andD Juras ldquoAnalysis of ride vibration environment of soilcompactorsrdquo SAE International Journal of Commercial Ve-hicles vol 3 no 1 pp 259ndash272 2010
[10] V Quynh Vibration study and control for cab of vibratoryroller PhD thesis Southeast University Nanjing China2013
[11] M Griffin Handbook of Human Vibration Academic PressLondon UK 1990
[12] International Organization for Standardization ldquoMechanicalvibration and shock-evaluation of human exposure to wholebody vibration-part 2 general requirementsrdquo Tech Rep ISO2631-11997 ISO Geneva Switzerland 1997
[13] S Yildirim ldquoVibration control of suspension systems using aproposed neural networkrdquo Journal of Sound and Vibrationvol 277 no 4-5 pp 1059ndash1069 2004
[14] N Ebrahimi and A Gharaveisi ldquoOptimal fuzzy supervisorcontroller for an active suspension systemrdquo InternationalJournal of Soft Computing amp Engineering vol 2 no 4pp 36ndash39 2012
[15] Z Xie P Wong J Zhao T Xu and I Wong ldquoA noise-insensitive semi-active air suspension for heavy-duty vehicleswith an integrated fuzzy-wheelbase preview controlrdquo Math-ematical Problem in Engineering vol 2013 Article ID 12195312 pages 2013
[16] B Kasemi A G A Muthalif M M Rashid and S FathimaldquoFuzzy-PID controller for semi-active vibration control usingmagnetorheological fluid damperrdquo Procedia Engineeringvol 41 pp 1221ndash1227 2012
[17] T Nguyen A novel semi-active magnetorheological mount forvibration isolation PhD thesis e University of ToledoToledo OH USA 2009
[18] A Muthalif B Kasemi D Nordin and M Rashid ldquoSemi-active vibration control using experimental model of Mag-netorheological damper with adaptive fuzzy-PID controllerrdquoSmart Structures and Systems vol 20 no 1 pp 85ndash97 2017
[19] S D Nguyen Q H Nguyen and S-B Choi ldquoA hybridclustering based fuzzy structure for vibration control-part 2an application to semi-active vehicle seat-suspension systemrdquoMechanical Systems and Signal Processing vol 56-57pp 288ndash301 2015
[20] W Wang Y Song Y Xue H Jin J Hou and M Zhao ldquoAnoptimal vibration control strategy for a vehiclersquos active sus-pension based on improved cultural algorithmrdquo Applied SoftComputing vol 28 pp 167ndash174 2015
[21] Y Chen Z Wang J Qiu and Z Huang ldquoHybrid fuzzyskyhook surface control using multi-objective microgeneticalgorithm for semi-active vehicle suspension system ridecomfort stability analysisrdquo Journal of Dynamic SystemsMeasurement amp Control vol 134 no 4 pp 1ndash14 2012
[22] International Organization for Standardization ldquoReportingvehicle road surface irregularitiesrdquo Tech Rep ISOTC108SC2WG4 N57 ieme Medical Publishers Stuttgart Germany1982
[23] M Mitschke Dynamik der Kraftfahrzeuge Springer-VerlagBerlin Germany 1972
[24] M Rahmat ldquoApplication of selftuning fuzzy PID controlleron industrial hydraulic actuator using system identificationapproachrdquo International Journal on Smart Sensing amp In-telligent Systems vol 2 no 2 pp 246ndash261 2009
[25] E H Mamdani and S Assilian ldquoAn experiment in linguisticsynthesis with a fuzzy logic controllerrdquo International Journalof Man-Machine Studies vol 7 no 1 pp 1ndash13 1975
[26] Z Nariman M Salehpour A Jamali and E HanghgooldquoPareto optimization of a five-degree of freedom vehicle vi-bration model using a MUGArdquo Engineering Applications ofArtificial Intelligence vol 23 no 4 pp 543ndash551 2010
[27] H John G Michael and D Gregory ldquoMulti-objective controloptimization for semi-active vehicle suspensionsrdquo Journal ofSound and Vibration vol 330 pp 5502ndash5516 2011
[28] J Y Wong ldquoData processing methodology in the charac-terization of the mechanical properties of terrainrdquo Journal ofTerramechanics vol 17 no 1 pp 13ndash41 1980
Shock and Vibration 15
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

e simulation results in Figures 12 and 13 also showthat the acceleration responses of the vertical driverrsquos seatcabrsquos pitch and roll vibrations of SHM with optimizationare lower than both PHM and SHM without optimizationBesides the values of the weighted RMS accelerationresponses are also listed in Tables 3 and 4 e weightedRMS values of the vertical driverrsquos seat cabrsquos pitch androll vibrations of SHM with optimization are greatly re-duced in comparison with SHM by 3516 4829 and3765 under a low excitation frequency 28 Hz of thedrum and by 2480 4315 and 3606 under a highexcitation frequency 35 Hz of the drum respectivelyConsequently the above analysis results also indicate thatthe driverrsquos ride comfort and health are strongly improvedby SHM with optimization when the vehicle moves andcompacts on the high elastoplastic soil ground under boththe lowhigh excitation frequency 2835 Hz of the vi-bratory drum
5 Conclusions
Modeling and low-frequency performance analysis of semi-active cabrsquos hydraulic mounts of the off-road vibratory rollerare addressed in this work e comparison between thesimulation and test results of passive cabrsquos isolation mounts
is also carried out e low-frequency performance of SHMusing the optimal fuzzy-PID controller is then evaluatedthrough the PSD acceleration and weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibrations inboth the frequency and time domains e results aresummarized as follows
(1) In the condition of the vehicle traveling the weightedRMS acceleration responses and the PSD accelera-tion responses of the vertical driverrsquos seat cabrsquos pitchand roll vibrations of SHM with optimization arelower than both PHM and SHM without optimi-zation Particularly the weighted RMS values ofSHM with optimization are strongly reduced incomparison with PHM by 3499 4256 and4172 respectively
(2) In condition of the vehicle working both PSD ac-celeration responses and the weighted RMS values ofthe vertical driverrsquos seat cabrsquos pitch and roll vibra-tions of SHM using the optimal fuzzy-PID controllerare clearly smaller comparable with both PHM andSHM without optimization under both lowhighexcitation frequency 2835Hz of the drum on thehigh elastoplastic soil ground Especially the maxi-mum PSD values of the vertical driverrsquos seat cabrsquos
45 46 47 48 49 50Time (s)
ndash01
ndash005
0
005
01
Roll
acce
lera
tion
(rad
middotsndash2)
PHMSHM without optimizationSHM with optimization
(c)
Figure 13 Results of the acceleration responses under a high excitation frequency 35Hz of the drum (a) Vertical driverrsquos seat (b) Cabrsquospitch angle (c) Cabrsquos roll angle
Table 3 e weighted RMS values under a low excitation frequency 28Hz of the drum
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 0657 0501 0426 3516awϕc (radmiddotsminus2) 0323 0184 0167 4829awθc (radmiddotsminus2) 0085 0056 0053 3765
Table 4 e weighted RMS values under a high excitation frequency 35Hz of the drum
Performance PHM SHM without optimization SHM with optimization SHM with optimization versus PHM ()awzs (mmiddotsminus2) 0512 0453 0385 2480awϕc (radmiddotsminus2) 0241 0162 0137 4315awθc (radmiddotsminus2) 0061 0040 0039 3606
14 Shock and Vibration
pitch and roll vibrations of SHM with optimizationare strongly reduced by 2446 3147 and 5937in comparison with PHM when the vehicle compactsat a low excitation frequency 28Hz of the drum
(3) e above analysis results indicate that the low-frequency and high-stiffness characteristics of SHMusing the optimal fuzzy-PID controller have the besteffect on isolating low-frequency vibration trans-mitted and controlling the cab shaking under variousoperating conditions of the off-road vibratory roller
Data Availability
e data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] V Liem J Zhang V Quynh and R Jiao ldquoVibration analysisand modeling of an off-road vibratory roller equipped withthree different cabrsquos isolation mountsrdquo Shock and Vibrationvol 2018 Article ID 8527574 17 pages 2018
[2] D Adam and F Kopf ldquoeoretical analysis of dynamicallyloaded soilsrdquo in Proceedings of the European WorkshopCompaction of Soils and Granular Materials pp 207ndash217Paris France 2000
[3] J Li Z Zhang H Xu and Z Feng ldquoDynamic characteristicsof the vibratory roller test-bed vibration isolation systemsimulation and experimentrdquo Journal of Terramechanicsvol 56 pp 139ndash156 2014
[4] J Paul and A Michael ldquoCapturing nonlinear vibratory rollercompactor behavior through lumped parameter modelingrdquoJournal of Engineering Mechanics vol 134 no 8 pp 684ndash6932008
[5] X Zhang Modelling simulation and optimization of ridecomfort for off road articulated dump trucks PhD thesisSoutheast University Nanjing China 2010
[6] A Pakowski and D Cao ldquoEffect of soil deformability on off-road vehicle ride dynamicsrdquo SAE International Journal ofCommercial Vehicles vol 6 no 2 pp 362ndash371 2013
[7] R A Irani R J Bauer and A Warkentin ldquoDynamic wheel-soil model for lightweight mobile robots with smooth wheelsrdquoJournal of Intelligent amp Robotic Systems vol 71 no 2pp 179ndash193 2013
[8] S Park A A Popov and D J Cole ldquoInfluence of soil de-formation on off-road heavy vehicle suspension vibrationrdquoJournal of Terramechanics vol 41 no 1 pp 41ndash68 2004
[9] A Kordestani S Rakheja P Marcotte A Pazooki andD Juras ldquoAnalysis of ride vibration environment of soilcompactorsrdquo SAE International Journal of Commercial Ve-hicles vol 3 no 1 pp 259ndash272 2010
[10] V Quynh Vibration study and control for cab of vibratoryroller PhD thesis Southeast University Nanjing China2013
[11] M Griffin Handbook of Human Vibration Academic PressLondon UK 1990
[12] International Organization for Standardization ldquoMechanicalvibration and shock-evaluation of human exposure to wholebody vibration-part 2 general requirementsrdquo Tech Rep ISO2631-11997 ISO Geneva Switzerland 1997
[13] S Yildirim ldquoVibration control of suspension systems using aproposed neural networkrdquo Journal of Sound and Vibrationvol 277 no 4-5 pp 1059ndash1069 2004
[14] N Ebrahimi and A Gharaveisi ldquoOptimal fuzzy supervisorcontroller for an active suspension systemrdquo InternationalJournal of Soft Computing amp Engineering vol 2 no 4pp 36ndash39 2012
[15] Z Xie P Wong J Zhao T Xu and I Wong ldquoA noise-insensitive semi-active air suspension for heavy-duty vehicleswith an integrated fuzzy-wheelbase preview controlrdquo Math-ematical Problem in Engineering vol 2013 Article ID 12195312 pages 2013
[16] B Kasemi A G A Muthalif M M Rashid and S FathimaldquoFuzzy-PID controller for semi-active vibration control usingmagnetorheological fluid damperrdquo Procedia Engineeringvol 41 pp 1221ndash1227 2012
[17] T Nguyen A novel semi-active magnetorheological mount forvibration isolation PhD thesis e University of ToledoToledo OH USA 2009
[18] A Muthalif B Kasemi D Nordin and M Rashid ldquoSemi-active vibration control using experimental model of Mag-netorheological damper with adaptive fuzzy-PID controllerrdquoSmart Structures and Systems vol 20 no 1 pp 85ndash97 2017
[19] S D Nguyen Q H Nguyen and S-B Choi ldquoA hybridclustering based fuzzy structure for vibration control-part 2an application to semi-active vehicle seat-suspension systemrdquoMechanical Systems and Signal Processing vol 56-57pp 288ndash301 2015
[20] W Wang Y Song Y Xue H Jin J Hou and M Zhao ldquoAnoptimal vibration control strategy for a vehiclersquos active sus-pension based on improved cultural algorithmrdquo Applied SoftComputing vol 28 pp 167ndash174 2015
[21] Y Chen Z Wang J Qiu and Z Huang ldquoHybrid fuzzyskyhook surface control using multi-objective microgeneticalgorithm for semi-active vehicle suspension system ridecomfort stability analysisrdquo Journal of Dynamic SystemsMeasurement amp Control vol 134 no 4 pp 1ndash14 2012
[22] International Organization for Standardization ldquoReportingvehicle road surface irregularitiesrdquo Tech Rep ISOTC108SC2WG4 N57 ieme Medical Publishers Stuttgart Germany1982
[23] M Mitschke Dynamik der Kraftfahrzeuge Springer-VerlagBerlin Germany 1972
[24] M Rahmat ldquoApplication of selftuning fuzzy PID controlleron industrial hydraulic actuator using system identificationapproachrdquo International Journal on Smart Sensing amp In-telligent Systems vol 2 no 2 pp 246ndash261 2009
[25] E H Mamdani and S Assilian ldquoAn experiment in linguisticsynthesis with a fuzzy logic controllerrdquo International Journalof Man-Machine Studies vol 7 no 1 pp 1ndash13 1975
[26] Z Nariman M Salehpour A Jamali and E HanghgooldquoPareto optimization of a five-degree of freedom vehicle vi-bration model using a MUGArdquo Engineering Applications ofArtificial Intelligence vol 23 no 4 pp 543ndash551 2010
[27] H John G Michael and D Gregory ldquoMulti-objective controloptimization for semi-active vehicle suspensionsrdquo Journal ofSound and Vibration vol 330 pp 5502ndash5516 2011
[28] J Y Wong ldquoData processing methodology in the charac-terization of the mechanical properties of terrainrdquo Journal ofTerramechanics vol 17 no 1 pp 13ndash41 1980
Shock and Vibration 15
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

pitch and roll vibrations of SHM with optimizationare strongly reduced by 2446 3147 and 5937in comparison with PHM when the vehicle compactsat a low excitation frequency 28Hz of the drum
(3) e above analysis results indicate that the low-frequency and high-stiffness characteristics of SHMusing the optimal fuzzy-PID controller have the besteffect on isolating low-frequency vibration trans-mitted and controlling the cab shaking under variousoperating conditions of the off-road vibratory roller
Data Availability
e data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
References
[1] V Liem J Zhang V Quynh and R Jiao ldquoVibration analysisand modeling of an off-road vibratory roller equipped withthree different cabrsquos isolation mountsrdquo Shock and Vibrationvol 2018 Article ID 8527574 17 pages 2018
[2] D Adam and F Kopf ldquoeoretical analysis of dynamicallyloaded soilsrdquo in Proceedings of the European WorkshopCompaction of Soils and Granular Materials pp 207ndash217Paris France 2000
[3] J Li Z Zhang H Xu and Z Feng ldquoDynamic characteristicsof the vibratory roller test-bed vibration isolation systemsimulation and experimentrdquo Journal of Terramechanicsvol 56 pp 139ndash156 2014
[4] J Paul and A Michael ldquoCapturing nonlinear vibratory rollercompactor behavior through lumped parameter modelingrdquoJournal of Engineering Mechanics vol 134 no 8 pp 684ndash6932008
[5] X Zhang Modelling simulation and optimization of ridecomfort for off road articulated dump trucks PhD thesisSoutheast University Nanjing China 2010
[6] A Pakowski and D Cao ldquoEffect of soil deformability on off-road vehicle ride dynamicsrdquo SAE International Journal ofCommercial Vehicles vol 6 no 2 pp 362ndash371 2013
[7] R A Irani R J Bauer and A Warkentin ldquoDynamic wheel-soil model for lightweight mobile robots with smooth wheelsrdquoJournal of Intelligent amp Robotic Systems vol 71 no 2pp 179ndash193 2013
[8] S Park A A Popov and D J Cole ldquoInfluence of soil de-formation on off-road heavy vehicle suspension vibrationrdquoJournal of Terramechanics vol 41 no 1 pp 41ndash68 2004
[9] A Kordestani S Rakheja P Marcotte A Pazooki andD Juras ldquoAnalysis of ride vibration environment of soilcompactorsrdquo SAE International Journal of Commercial Ve-hicles vol 3 no 1 pp 259ndash272 2010
[10] V Quynh Vibration study and control for cab of vibratoryroller PhD thesis Southeast University Nanjing China2013
[11] M Griffin Handbook of Human Vibration Academic PressLondon UK 1990
[12] International Organization for Standardization ldquoMechanicalvibration and shock-evaluation of human exposure to wholebody vibration-part 2 general requirementsrdquo Tech Rep ISO2631-11997 ISO Geneva Switzerland 1997
[13] S Yildirim ldquoVibration control of suspension systems using aproposed neural networkrdquo Journal of Sound and Vibrationvol 277 no 4-5 pp 1059ndash1069 2004
[14] N Ebrahimi and A Gharaveisi ldquoOptimal fuzzy supervisorcontroller for an active suspension systemrdquo InternationalJournal of Soft Computing amp Engineering vol 2 no 4pp 36ndash39 2012
[15] Z Xie P Wong J Zhao T Xu and I Wong ldquoA noise-insensitive semi-active air suspension for heavy-duty vehicleswith an integrated fuzzy-wheelbase preview controlrdquo Math-ematical Problem in Engineering vol 2013 Article ID 12195312 pages 2013
[16] B Kasemi A G A Muthalif M M Rashid and S FathimaldquoFuzzy-PID controller for semi-active vibration control usingmagnetorheological fluid damperrdquo Procedia Engineeringvol 41 pp 1221ndash1227 2012
[17] T Nguyen A novel semi-active magnetorheological mount forvibration isolation PhD thesis e University of ToledoToledo OH USA 2009
[18] A Muthalif B Kasemi D Nordin and M Rashid ldquoSemi-active vibration control using experimental model of Mag-netorheological damper with adaptive fuzzy-PID controllerrdquoSmart Structures and Systems vol 20 no 1 pp 85ndash97 2017
[19] S D Nguyen Q H Nguyen and S-B Choi ldquoA hybridclustering based fuzzy structure for vibration control-part 2an application to semi-active vehicle seat-suspension systemrdquoMechanical Systems and Signal Processing vol 56-57pp 288ndash301 2015
[20] W Wang Y Song Y Xue H Jin J Hou and M Zhao ldquoAnoptimal vibration control strategy for a vehiclersquos active sus-pension based on improved cultural algorithmrdquo Applied SoftComputing vol 28 pp 167ndash174 2015
[21] Y Chen Z Wang J Qiu and Z Huang ldquoHybrid fuzzyskyhook surface control using multi-objective microgeneticalgorithm for semi-active vehicle suspension system ridecomfort stability analysisrdquo Journal of Dynamic SystemsMeasurement amp Control vol 134 no 4 pp 1ndash14 2012
[22] International Organization for Standardization ldquoReportingvehicle road surface irregularitiesrdquo Tech Rep ISOTC108SC2WG4 N57 ieme Medical Publishers Stuttgart Germany1982
[23] M Mitschke Dynamik der Kraftfahrzeuge Springer-VerlagBerlin Germany 1972
[24] M Rahmat ldquoApplication of selftuning fuzzy PID controlleron industrial hydraulic actuator using system identificationapproachrdquo International Journal on Smart Sensing amp In-telligent Systems vol 2 no 2 pp 246ndash261 2009
[25] E H Mamdani and S Assilian ldquoAn experiment in linguisticsynthesis with a fuzzy logic controllerrdquo International Journalof Man-Machine Studies vol 7 no 1 pp 1ndash13 1975
[26] Z Nariman M Salehpour A Jamali and E HanghgooldquoPareto optimization of a five-degree of freedom vehicle vi-bration model using a MUGArdquo Engineering Applications ofArtificial Intelligence vol 23 no 4 pp 543ndash551 2010
[27] H John G Michael and D Gregory ldquoMulti-objective controloptimization for semi-active vehicle suspensionsrdquo Journal ofSound and Vibration vol 330 pp 5502ndash5516 2011
[28] J Y Wong ldquoData processing methodology in the charac-terization of the mechanical properties of terrainrdquo Journal ofTerramechanics vol 17 no 1 pp 13ndash41 1980
Shock and Vibration 15
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom




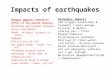














![Untitled-1 [theuniqueacademy.com]theuniqueacademy.com/wp-content/uploads/2017/06/UPSC-Brochure... · Infrastructure: Energy, Ports, Roads, Airports, Railways etc. Investment models](https://img.pdfslide.net/doc/110x75/5ad763917f8b9a32618c40a5/untitled-1-energy-ports-roads-airports-railways-etc-investment-models.jpg)









