Embed Size (px)
Citation preview

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 1/71

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 2/71
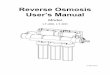
A system is homogeneous
if it multiplies all input
amplitudes of a certain
frequency by a constant:if:
inp(t)
outp(t)then:
k x inp(t) k x outp(t)
Homogeneity

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 3/71
Time (s)
0 0.02-1
1
0
Time (s)
0 0.02-1
1
0
Time (s)
0 0.02-1
1
0
Time (s)
0 0.02-1
1
0
SYSTEMamplifier
Time (s)
0 0.02-1
1
0
input amplitude (mV)
output amplitude (mV)
25
Time (s)
0 0.02-1
1
0
300 Hz 300 Hz
37.5
50 75
75
112,5
25/50/75 mV 37.5/75/112,5 mV
linear relationship
amplification factorof 1.5 for each
amplitude value
line crosses 0
Homogeneity

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 4/71
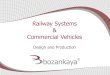
A system is additive if the sum of individual
output signals eaquals the sum of the sameindividual input signals after having passed
through the system, i.e:
if:
inp1(t) outp1(t)
inp2(t) outp2(t)
then:
[inp1(t) + inp2(t)] [outp1(t) + outp2(t)]
Additivity

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 5/71
Time (s)
0 0.02-0.5116
0.5075
0
Time (s)
0 0.5.05411
0.1753
0
Time (s)
0 0.02-0.5
0.5
0
Time (s)
0 0.02-0.5
0.5
0+
=
Time (s)
0 0.02-0.8801
0.8801
0
SYSTEMlow-pass filter
cutoff 450 Hz
Time (s)
0 0.02-0.51
0.5146
0
+=
sinewave
300 Hz
sinewave
600 Hz
no effect
amplitudeset to 0
Additivity

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 6/71
A system is time-invariant if it does notchange the output over time, i.e.:
if:inp(t) outp(t)
then:
inp(t) + d seconds outp(t) + d seconds
Time-Invariance

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 7/71
Time (s)
0 0.00907029-2
2
0
Time (s)
0 0.00907029-2
2
0
SYSTEM
amplifier
(by factor 2)
Time (s)
0 0.00907029-2
2
0
Time (s)
0 0.00907029-2
2
0
s i g n a l 1 : p u l s e
s i g n a l 2 : p u l s e
delayed by 3 msIMPORTANT: delayed of 3 ms stays
constant
Time-Invariance

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 8/71
SYSTEM
Frequency
R e s p o n s e
output amplitudeinput amplitude
Input signal Output signal
Frequency Frequency
A m p l i t u d e
A m p l i t u d e
transfer function or
frequency response
Frequency Domain
Characterisation of LTIs

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 9/71
SYSTEMInput signal
(impulse)
Output signal
time
phase spectrum
amplitude spectrum
0
k
phase spectrum
amplitude spectrum
phase response
amplitude response
Time-Domain
Characterisation of LTIs

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 10/71
transfer functionor
frequency response
SYSTEM
Frequency
R
e s p o n s e
Charaterisation of signals and systems
Frequency
A m
p l i t u d e
SIGNALS
Time (s)
0 0.01-1.167
1.083
0
frequencydomain
timedomain
frequencydomain

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 11/71
Question:
Can systems becharacterised by a time
domain?
Answer:YES!

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 12/71
Time-domain characterisation of LTI systems
3
0
LTI-SYSTEM
3
0
3
1
0
3
1
0
* 1/3
system ishomogenious so
output will be *1/3 as well
* 1/3
1/3 ms

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 13/71
Time-domain characterisation of LTI systems
3
0
LTI-SYSTEM
3
0
3
0
3
0
system is timeinvariant so
delay will remain3 ms
delay: 3 msdelay: 3 ms

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 14/71
Time-domain characterisation of LTI systems
3
0LTI-
SYSTEM
3
0
3
0
3
0
additivity
+ +

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 15/71
Time-domain characterisation of LTI systems
LTI-SYSTEM
3
0
3
0
What we can do already:
If we know the system response to one single pulse,we can predict the output for a 'complicated' chain of pulses.

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 16/71
Time-domain characterisation of LTI systems
pulses of 1/3 ms

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 17/71
Time-domain characterisation of LTI systems
pulses of 1/7 ms

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 18/71
Time-domain characterisation of LTI systems
relationship between pulse duration and output amplitude:
the shorter the puls the less energy it contains,the smaller will be the amplitude of the output signal

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 19/71
Time-domain characterisation of LTI systems
In order not to loose energy of the output signal we
increase the amplitude of the input pulse ...
... untill at some pointthe puls has no
duration and itsamplitude isinfinitely high

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 20/71
Time-domain characterisation of LTI systems
relationship between puls duration and output amplitude:
An infinitesimally narrowand infinitely small pulse
of finite energy is knownas an impulse. True impulses areonly a mathematicalconcept and do notoccur in real life.

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 21/71
Time-domain characterisation of LTI systems
IMPORTANT:
• With an impulse response ANY output of an LTI systemcan be predicted by the input.
• Therefor: In the time-domain LTI systems are completelycharacterised by their impulse response.

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 22/71
Time-domain characterisation of LTI systems
Concept of CONVOLUTION
• True impulses cannot be used in signal processing.
• Convolution is used to calculate the time response of an LTI
system on a given pulse response.
Convolution requires thorough knowledge of calculus.

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 23/71
Time-domain characterisation of LTI systems
The relationship between theimpulse response and the frequency response
impulse response and frequency response are two differentpoints of view to look at the same thing: the response of a system
We should actually be able e.g. to determine the impulse responsefrom the frequency domain.
This is what we will do in the following.

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 24/71
Time-domain characterisation of LTI systems
Suppose we know the frequency response to a system and want to knowwhat its output is to an impulse. Remember how to do that?
Output amplitude (f) = Input amplitude (f) X Amplitude response (f)
And for the phase spectrum?
Output phase (f) = Input phase (f) + Phase response (f)

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 25/71
Time-domain characterisation of LTI systems
Output amplitude (f) = Input amplitude (f) X Amplitude response (f)
Output phase (f) = Input phase (f) + Phase response (f)
What is the phase spectrum of an impulse?
Answer: 0
What is the amplitude spectrum of an impules?
Answer: constant (k)
0
k

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 26/71
Time-domain characterisation of LTI systems
conclusion
Output phase (f) = Phase response (f)
The phase spectrum of the impulse response of asystem is simply the phase response of the system
Output amplitude (f) = k X Amplitude response (f)
The spectrum of a system impulse response is simply
the amplitude response of the system.

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 27/71
Time-domain characterisation of LTI systems
SYSTEMInput signal Output signal
time
phase spectrum
amplitude spectrum
0
k
phase spectrum
amplitude spectrum
phase response
amplitude response

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 28/71
EE-2027 SaS, L3: 4/20
Examples of Simple Systems
To get some idea of typical systems (and their properties), considerthe electrical circuit example:
which is a first order , CT differential equation.
Examples of first order , DT difference equations:
where y is the monthly bank balance, and x is monthly net deposit
which represents a discretised version of the electrical circuit
Example of second order system includes:
System described by order and parameters (a, b, c)

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 29/71
EE-2027 SaS, L3: 5/20
First Order Step Responses
People tend to visualise systems in terms of their responsesto simple input signals (see Lecture 4…)
The dynamics of the output signal are determined by thedynamics of the system, if the input signal has no
dynamics
Consider when the input signal is a step at t, n = 1, y(0) = 0
First order CT differential system First order DT difference system
t
u(t)
y(t)

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 30/71
EE-2027 SaS, L3: 6/20
System Linearity
Specifically, a linear system must satisfy the two properties:1 Additive: the response to x1(t)+x2(t) is y1(t) + y2(t)
2 Scaling: the response to ax1(t) is ay1(t) where aC
Combined: ax1(t)+bx2(t) ay1(t) + by2(t)
E.g. Linear y(t) = 3*x(t) why?
Non-linear y(t) = 3*x(t)+2, y(t) = 3*x2(t) why?
(equivalent definition for DT systems)
x
y
The most important property that a system
possesses is linearity
It means allows any system response to be
analysed as the sum of simpler responses(convolution)
Simplistically, it can be imagined as a line

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 31/71
EE-2027 SaS, L3: 7/20
Bias and Zero Initial Conditions
Intuitively, a system such as:
y(t) = 3*x(t)+2
is regarded as being linear. However, it does not satisfy the
scaling condition.
There are several (similar) ways to transform it to anequivalent linear system
Perturbations around operating value x*, y*
Linear System Derivative
Locally, these ideas can also be used to linearise a non-
linear system in a small range

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 32/71
EE-2027 SaS, L3: 8/20
Linearity and Superposition
Suppose an input signal x[n] is made of a linear sum of
other (basis/simpler) signals xk[n]:
then the (linear) system response is:
The basic idea is that if we understand how simple signals
get affected by the system, we can work out how complex
signals are affected, by expanding them as a linear sum
This is known as the superposition property which is true for
linear systems in both CT & DT
Important for understanding convolution (next lecture)

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 33/71
EE-2027 SaS, L3: 9/20
Definition of Time Invariance
A system is time invariant if its behaviour and characteristics arefixed over time
We would expect to get the same results from an input-outputexperiment, if the same input signal was fed in at a different time
E.g. The following CT system is time-invariant
because it is invariant to a time shift, i.e. x2(t) = x1(t-t0)
E.g. The following DT system is time-varying
Because the system parameter that multiplies the input signal istime varying, this can be verified by substitution

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 34/71
EE-2027 SaS, L3: 10/20
System with and without Memory
A system is said to be memoryless if its output for each value ofthe independent variable at a given time is dependent on the
output at only that same time (no system dynamics)
e.g. a resistor is a memoryless CT system where x(t) is current
and y(t) is the voltage
A DT system with memory is an accumulator (integrator)
and a delay
Roughly speaking, a memory corresponds to a mechanism in thesystem that retains information about input values other than
the current time.

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 35/71

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 36/71
EE-2027 SaS, L3: 12/20
System Stability
Informally, a stable system is one in which small input signals leadto responses that do not diverge
If an input signal is bounded, then the output signal must also bebounded, if the system is stable
To show a system is stable we have to do it for all input signals.To show instability, we just have to find one counterexample
E.g. Consider the DT system of the bank account
when x[n] = [n], y[0] = 0
This grows without bound, due to 1.01 multiplier. This system isunstable.
E.g. Consider the CT electrical circuit, is stable if RC>0, because itdissipates energy

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 37/71
EE-2027 SaS, L3: 13/20
Invertible and Inverse Systems
A system is said to be invertible if distinct inputs lead to distinctoutputs (similar to matrix invertibility)
If a system is invertible, an inverse system exists which, whencascaded with the original system, yields an output equal to
the input of the first signal
E.g. the CT system is invertible:
y(t) = 2x(t)
because w(t) = 0.5*y(t) recovers the original signal x(t)
E.g. the CT system is not-invertible
y(t) = x2(t)
because distinct input signals lead to the same output signalWidely used as a design principle:
– Encryption, decryption
– System control, where the reference signal is input

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 38/71
EE-2027 SaS, L3: 14/20
Systems are generally composed of components (sub-systems).
We can use our understanding of the components and their
interconnection to understand the operation and behaviour of
the overall system
Series/cascade
Parallel
Feedback
System Structures
System 1 System 2x y
System 1
System 2
x y
+
System 2
System 1x y
+

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 39/71
EE-2027 SaS, L3: 15/20
Systems In Matlab
A system transforms a signal into another signal.
In Matlab a discrete signal is represented as an indexedvector.
Therefore, a matrix or a for loop can be used totransform one vector into another
Example (DT first order system)
>> n = 0: 10;>> x = ones( si ze( n) ) ;
>> x( 1) = 0;
>> y( 1) = 0;
>> f or i =2: 11y( i ) = ( y( i - 1) + x( i ) ) / 2;
end
>> pl ot ( n, x, ‘ x’ , n, y, ‘ . ’ )
S t Lib i i Si li k

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 40/71
EE-2027 SaS, L3: 16/20
System Libraries in Simulink

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 41/71

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 42/71
Discrete-time LTI systems
x[n] - a discrete-time signal
We want to rewrite x[n] using unit impulse functions
More specifically, utilizing the sampling property
Define
We can rewrite
Superposition of scaled versions of time shifted unit impulses

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 43/71
Discrete-time LTI systems
Why do we want to rewrite x[n] in such a cumbersome way?!?
Let
output is a sum of time-shifted
versions of h with weights x[k]

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 44/71
Discrete-time LTI systems
A discrete-time LTI system is completely characterized by
Called (unit) impulse response(unit) impulse response
is known as convolution sumconvolution sum or
superposition sumsuperposition sum Operation is called the convolutionconvolution of sequences
Notation:

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 45/71
Evaluation of convolution sum:

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 46/71
Evaluation of convolution sum:
Method #1
2
2
1
5
32
32
E l ti f l ti

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 47/71
Take
Shift it to the rightright by n
Take the product
Take summation
Example: y[-1]
1
22
1 12
Evaluation of convolution sum:
Method #2
1
E l i f l i

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 48/71
Evaluation of convolution sum:
Method #2 Example: y[2]
122
12
1

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 49/71
Continuous-time LTI systems
We can rewrite using the unit impulse function
Continuous-time counterpart (after similar exercise)
where (called (unit) impulse response(unit) impulse response)
Integration called convolution integralconvolution integral or superposition integralsuperposition integral
Notation:
CT LTI system characterized by its impulse response
Procedure for evaluating

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 50/71
Procedure for evaluating
convolution
Take Shift it to the rightright by t
Take the product
Integrate over the “intersectionintersection”
Examples:
0
P d f l ti

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 51/71
Procedure for evaluating
convolution
-1
0
1
••
0
0
0
0
0
0
00
0
Procedure for evaluating

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 52/71
Procedure for evaluating
convolutionExample: For t > 0,
Answer:

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 53/71
P ti f LTI t

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 54/71
Properties of LTI systems
3. Associative property
Impulse response of the cascade of two LTI systems is the convolution
of their individual impulse responses
Order of the systems does not matter!Order of the systems does not matter!
Can be generalized to the cascade of an arbitrary number of LTIsystems
Require both linearity and time invarianceboth linearity and time invariance

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 55/71
Properties of LTI systems
4. Invertibility of LTI systems
When S is LTI and invertible, there exists an inverse system which is LTI
5. Causality for LTI system
Recall that in order for S to be causal, should depend only on
DT:
CT:
P ti f LTI t

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 56/71
Properties of LTI systems
6. LTI systems with and without memory
A system is memorylessmemoryless if, for any two pairs of input-outputsand given , implies
DT:
CT:
Properties of LTI systems

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 57/71
Properties of LTI systems
7. Stability for LTI systems
BIBO stability: every bounded input leads to a bounded output
DT LTI system S (with impulse response h) is stable iff (if and only if)
Called “absolutelyabsolutely summablesummable”
CT LTI system S (with impulse response h) is stable iff (if and only if)
Called “absolutelyabsolutely integrableintegrable”
Exploiting Superposition and Time-Invariance

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 58/71
Question: Are there sets of “basic” signals so that:
a) We can represent rich classes of signals as linear combinations of
these building block signals.
b) The response of LTI Systems to these basic signals are both simpleand insightful.
Fact: For LTI Systems (CT or DT) there are two natural choices for
these building blocks
Focus for now: DT Shifted unit samples
CT Shifted unit impulses
Representation of DT Signals Using Unit Samples

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 59/71
That is ...

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 60/71
That is ...
Coefficients Basic Signals
The Sifting Property of the Unit Sample

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 61/71
DT System x[n] y[n]
• Suppose the system is linear, and define hk [n] as the
response to δ [n - k ]:
From superposition:

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 62/71
DT System x[n] y[n]
• Now suppose the system is LTI, and define the unit
sample response h[n]:
From LTI:
From TI:
Convolution Sum Representation of
Response of LTI Systems

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 63/71
Response of LTI Systems
Interpretation
n n
n n
Visualizing the calculation of

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 64/71
y[0] = prod of
overlap for
n = 0
y[1] = prod of
overlap for
n = 1
Choose value of n and consider it fixed
View as functions of k with n fixed
Calculating Successive Values: Shift, Multiply, Sum

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 65/71
g , p y,
-1 1 × 1 = 1
(-1) × 2 + 0 × (-1) + 1 × (-1) = -3
(-1) × (-1) + 0 × (-1) = 1
(-1) × (-1) = 1
4
0 × 1 + 1 × 2 = 2
(-1) × 1 + 0 × 2 + 1 × (-1) = -2
Properties of Convolution and DT LTI Systems

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 66/71
1) A DT LTI System is completely characterized by its unit sample
response

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 67/71
Unit Sample response
Th C t ti P t

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 68/71
The Commutative Property
Ex: Step response s[n] of an LTI system
“input” Unit Sample response
of accumulator
step
input
The Distributive Property

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 69/71
Interpretation
The Associative Property

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 70/71
Implication (Very special to LTI Systems)
Properties of LTI Systems

8/12/2019 Lt i Systems
http://slidepdf.com/reader/full/lt-i-systems 71/71
1) Causality ⇔
2) Stability ⇔