-
8/8/2019 Lunar Module Descent and Ascent
1/24
N A S A T E C H N I C A L N O T E
APOLLO EXPERIENCE REPORT -MISSION PLANNING FOR LUNAR
MODULEDESCENT AND ASCENT
1 by Floyd V, BennettMunned Sucecrdft CenterHozlston, Texus
77058
N A T I O N A L A E R ON A U TI C S A N D S PA CE A D M I N I S
T R A T I O N W A S H I N G T O N , D. C. J U N E 197
-
8/8/2019 Lunar Module Descent and Ascent
2/24
I. Rewrt No. 2. Government Accession NoNASA TN D-68464. Title
and Subtitle
A P O L L O E X P E R I E N C E R E P O R TMISSION PLANNING FOR
LUNAR MODULE
3. Recipient,'s Catalog No.
6 Reoort DateJune 19726. Performing Organization Code
Floyd V . Bennett , MSCDESCENT AND ASCENT
7. Author(sJMSC S-295
8. Performing Organization Report No.
9. Performing Organization Name and AddressM a nne d S pa c e c
r a f t C e n te rHouston, Texas 77058
2. Sponsoring Agency Name and Address
10. Work Unit No.076-00-00-00-72
11. Contract or Grant No.
13. Type of Report and Period Covered
Na t ional Ae r o na u t i c s a nd S pa c e Adm in i s t r a
tionWa sh ing ton , D. C. 20546
f this page)
14. Sponsoring Agency Code
21. 'NO. of Pages 22. Price*48 $3.00
I5. Supplementary Notes: h i s Apo l lo Exp e r i e nc e R e p
or t , because, in h i s j udgm e n t , use of SI Uni t s wou ld im
pa i r the usefulnes,3f the report or r e s u l t in excessive c o
s t .
T h e MS C D i r e c t o r w a i ve d t h e u s e of the I n t e
r na tiona l S ys t e m o f Un i t s (SI) o r6. Abstract
The p r e m is s io n p la nn ing , t he r e a l - t im e s i
tua t ion , a nd the post f li gh t a na lys i s f o r t he Apo l
lo 11l u n a r d e s c e n t a n d a s c e n t ar e d e s c r i b e
d i n t h i s r e p o r t . A c o m p a r i s o n b e t w ee n p r
e m i s s i o n p l a n -n in g a n d a c t u a l r e s u l t s is
i nc lude d , A na v igat ion c o r r e c t i on c a pa b i li t y
, de ve lope d f r om Apo llo 11pos t fl i gh t a na lys i s , wa s
u se d suc c e s s f u l ly on Apo llo 12 o p r ov ide the f i r s
t p inpo in t l a nd ing . Ane xpe r i e nc e sum m a r y , wh ic h
i l l u s t r a t e s t yp ic a l p r ob le m s e nc oun te r e d
by the m is s ion p l a nne r s ,is a l s o inc lude d.
19. Security Classif. (of this report)None
20. Security Classif. (None
18. Distribution Statement
For sale by he National Technical Information Service,
Springfield, Virginia 22151
-
8/8/2019 Lunar Module Descent and Ascent
3/24
I
,
CONTENTS
Page112
SUMMARYINTRODUCTION. . . . . . . . . . . . . . . . . . . . .
.PREMISSION PLANNING . . . . . . . . . . . . . . . . .I . . . . . .
. . , .
Descent Planning . . . . . . . . . . . . . . . .Ascent
Planning
* 4 ' * ' . * * *~ I~
I I
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.REAL-TIMEANALYSIS. . . . . . . . . . . . . . . . . . ( . . . . . .
. . . . .
Descent Orbit Insertion . . . . . . . . . . . . . . . . . . . .
. . . . . . .Powered Descent . I . . . . . .II. . . . . . . . . . .
. . . . . . . . . . . . . ' I
IAscent . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . .POSTFLIGHT ANALYSIS . . . . . . . . . . . . . .
. . . . . . . I . . . . . . .I
I/Apollo 1 1 Descent . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . .
Apollo 11 Ascent . . . . . . . . . . . . . . . . . . . . . . .
.; . . . . . . .1 IAPOLLO 12 MISSION . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . .
Apollo 12 Planning . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . .Apollo 12 Posff light Analysis I. . . . . . . . . .
. . . . . . . . . . . . . . .
MISSION-PLANNING EXPERIENCE . . . . . . . . . . . . . . . . . .
. . . . .System Design Specifications . . . . . . . . . . . . . . .
. . . . . . . . . .Definition of System Pe rf ormanc es . . . . . .
. . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.ystem InterfacesMission- Planning Flexibility . . . . . . . . . .
. . . . . . . . . . . . . . . .Experience Summary . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . .
. . . . . . . . . . . . . . . .ONCLUDING REMARKS
313161616202 121252626293132333738394 04 2. . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . .EFI~RENCES
iii
-
8/8/2019 Lunar Module Descent and Ascent
4/24
TableI
I1
I11
IVV
Figure123
iI .1I
TABLES
APOLLO 11 PREMISSION POWERED-DESCENT EVENTSUMMARY . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . .APOLLO 11 PREMISSION
DESCENT AV AND PROPELLANTREQUIREMENTS . . . . . . . . . . . . . . .
. . . . . . . . . . . .APOLLO 11 PREMISSION A S C E N T A V AND
PROPELLANTREQUIREMENTS . . . . . . . . . . . . . . . . . . . . . .
. . . . .APOLLO 11LUNAR-DESCENT EVENT TIMESAPOLLO 11 ASCENT
SUMMARY
. . . . . . . . . . . . .(a) Events . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . .(b ) Inse rtion conditions . . .
. . . . . . . . . . . . . . . . . . . . . . .(c) Parameters . . . .
. . . . . . . . . . . . . . . . . . . . . . . . .
FIGURES
Lunar module descent . . . . . . . . . . . . . . . . . . . . . .
.bera t ion al phases of powered descent . . . . . . . . . . . . .
. . . .Lunar module body axes and LR antenna axes
Ia) Lunar module body axes . . . . . . . . . . . . . . . . . . .
. . . .c) Landing radar position 1 (used in braking phase) . . . .
. . . . . .:d) Landing ra dar pos,ition 2 (used in approach and
landingp h a s e s ) . ~ .. . . . . . . . . . . . . . . . . . . . .
. . . . . . .Lunar module forward window . . . . . . . . . . . . .
. . . . . . . . .Basic LM descen t guidance logic
I
b) Landing ra da r antenna axes . . . . . . . . . . . . . . . .
. . . . .I
. . . . . . . . . . . . . . . . . . . .Target sequence fo r
abtom atic-descent guidance . . . . . . . . . . . .Pre miss ion
Apollo 11 LM powered descent . . . . . . . . . . . . . . .
iv
Page
9
12
1522
252526
Page33
55556678
-
8/8/2019 Lunar Module Descent and Ascent
5/24
L , _ f i "I!I
8 Premission Apollo 11 time history of thrus t and attitude(a)
Thrust . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.; . .7
I
(b) Attitude . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . .I . . . . . . . I * *I. . . . . . . . . . . . . . . . . . .
. . . . . . .anding phase , . .;.. . . . .redi cted Apollo 11
landing dispersions 7 ' ' * * ' * *1011 1111
1213
I i. . . . . . . . . . . . . . . . .remission Apollo 11 LM
ascent ./ .;.~Pr emi ssi on Apollo 11 vertical-r ise phase . . . .
/ . . . . . . . . . . .1
14
1314
1516
1414
Pr emi ssi on Apollo 1 1 orbit-insertion phasePredicted Apollo
11 asc
. . . I . . . . . . . . . . .. . . . . I I. . . . . . . . . . .1
1Effect of position e r r o r on velocity comparison . .I. . .~. .
. . . . .
17 Guidance thrust command as a function of horizonjal velbcity
. . . . . . i18 Landing radar altitude updates . . . . . . . . . .
. . . . . . . . . . . ~ 19I I19 Altitude as a function of altitude
rate during powered descent . . . . . j 20
20 Apollo 11 landing site * I . * * * ' * " 2021 Apollo 11
approach phase . . . . . . . . . . . . . . . I . . . . . . . 2322
Apollo 11 landing phase . . . . . . . . . . . . . . . . . . . . . .
. . . 23
I. . . . . . . . . . . . . . . . .
I . . . . . . . . . . . . . . .3 Apollo 11 groundtrack fo r the
landing phase 24. . . . . . . . . . . . .4 Apollo 11 attitude profi
le fo r the landing phase 2425 Apollo 11 altitude as a function of
altitude rate for the landing. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . .hase 2426 Apollo 11 landing-phase
events. 24. . . . . . . . . . . . . . . . . . . .27
28
Landing site update capability during braking phase(a) Throttle
margin time 27(b) Change in chara cte ris ti c velocity . . . . . .
. . . . . . . . . . . . 27. . . . . . . . . . . . . . . . . . . . .
. . .Predict ed Apollo 12 landing dispersions . . . . . . . . . . .
. . . . . . 28
V
-
8/8/2019 Lunar Module Descent and Ascent
6/24
Figure2930
3132
33
3435
Variation of AV with landing-phase velociti es . . . . . . . . .
. . . .The AV require ments fo r down-range redesignations at a
4000-footaltitude . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . .Comparison of Apollo 11 and Apollo 12 LPD profiles .
. . . . . . . . .Apollo 12 window views 30 seconds a ft er high
gate (al titude, 4000 feet)(a) Right-hanh window view taken with
onboard 16-millimeter(b) Lunar module altitude above the landing
site as a function of
IApollo 1 2 approach phase(a) Landing point designator angle as
a function of sur fac e distance
to the landing site . . . . . . . . . . . . . . . . . . . . . .
. . .(b) Computer recons truction of commander' s view . . . . . .
. . . . .
1ca mer a (camera tilted 4 1' o the horizon) . . . . . . . . . .
. .surface distance to the landing site . . . . . . . . . . . . . .
. .
I Apollo 12 groundtrack for the landing phase . . . . . . . . .
. . . . . .1
Attitude as a functioniof up-range distance for the Apollo 12
approachand landing phase s 1. . . . . . . . . . . . . . . . . . .
. . . . . . . . .
Page28
2828
2929
303030
31
vi
-
8/8/2019 Lunar Module Descent and Ascent
7/24
' i
f
II
APOL L O EXPER IEN C E R EPOR T 1
! I II~
\ S U M M A R Y II \ , > 1
Premi ssi on planning, real -time analysi s of miss idn events,
and posffliglys is are desc ribed for the lunar module descent and
asce nt phases of the Apollmission, the first manned lunar landing,
and for the Apollo 1 2 mission, the fircapability was provided for
the Apollo 1 2 descent. Flight res ult s for both misishown to be
in agr eement with premi ssion planning. A summary of
mission-p!experience, which il lu st ra te s typical prob lems
encountered by ithe mission plaiis als o included in this, repo
rt.
I '!' \
point lunar landing. Based on the Apollo 11 postflight analysis
, a navigation c(anal-11
t\ pin-rectionons arenningers ,I
II N T R O D U C T I O N II
Premi ss ion planning fo r Apollo lunar module (LM) descent and
ascent sta rted in1962 with the decision to us e the lunar orbit
rendezvous (LOR) technique for the Apollolunar-landing mission (
ref. 1)J The LOR concept advanced by Houbolt and others isdefined
in refe renc es 1 and 2. The technique allowed optimization of both
the des ign ofLM yste ms and trajectories f o r orbital descent to
and ascent from the lunar surf ace.',The LM descent wa s designed
to be accomplished in two powered-flight maneu-vers : the descent
orbit insertion (DOI) maneuver and the powered-descent maneuver.The
DO1 maneuver, a short o r iiulse-type tra nsfe r maneuver, is
performed to re -duce the orbit alt itude of the LM from the
command and service module (CSM) parkingorbit to a lower altitude
fo r efficidncy in initiating the longer, mor e complex
powered-descent maneuver. The basic trajectory design for the
powered descent wa s dividedinto thre e operational phases : an
init ial fuel-optimum phase, a landing-approach tran-sition phase,
and a final translation and touchdown phase. The initial trajecto
ry anal-ys is which led to this design was performed by Bennett and
Price (ref. 3 ) . Inreference 4, Cheatham and Bennett provided a
detailed descrip tion of the LM descent
*The mat eri al presented in this repor t, with the exception of
the sect ion entitled"Mission-Planning Experience, " was previously
published in NASA TM X-58040.
-
8/8/2019 Lunar Module Descent and Ascent
8/24
design strateg y. This description illustr ates the complex
interactions among sy st em s(guidance, navigation, and con tro l;
propulsion; and landing radar), crew, trajectory,and operational
cons train ts. A more de tailed descr iption of the guidance,
navigation,and control system is given by S ear s (re f. 5). As LM
sy ste ms changed f ro m designconcept to hardware, and as
operational constraints were modified, it became neces-sa ry to
modify o r reshape the LM descent traject ory; however, the basic
three-phasedesign philosophy was retained.The LM ascent was
designed as a single powered-flight maneuver to ret ur n thecrew
from the lunar surface, o r fro m an aborted descent, to a
satisfactory orbit fro mwhich rendezvous with the CSM could be
performed . The basic trajec tor y design forthe powered ascen t
was divided into two operational phases: a vertical- rise phase
forsurface clearance and a fuel-optimum phase fo r or bi t
insertion. Thus, the ascentplanning was more straig htfo rward than
the descent planning and, because of the lackof a lunar atmosphere
, l e s s complex than earth-launch planning.The purpose of this
report is to descr ibe the p remission operational planning f o rLM
descent and ascen t; that is, to describe the bridge from design
planning to flight-operation stat us. A discussion of the primary
c'riteria which precipitated the plan fo rthe Apollo 11 mission, a
comparison of the r eal-tim e mission events with this plan, a
discussion of the postflight ana lysi s of the Apollo 11 mission
and its application to theApollo 12 and subsequent miss ions, and a
brief postflight discussion of the Apollo 12mission are included in
thi s re po rt . In addition, a section on mission-planning
expe-rience is included to provide insight into typical prob lems
encountered by the missionplann ers and the solutions that evolved
in to the final operational plan.The author wishes to acknowledge
the ass ista nce of the mem ber s of the LunarLanding Section of
the Landing Analysis Branch (Mission Planning and Analysis
Divi-sion), particularly, W. M . Bolt, J. H . Alphin, J. D. Payne,
and J. V . W e s t , whocontributed to the generation of the data
presented in this report.
with Ecausebeen 1and pl
neuvenent Echaraprovic
2
' P REM IS S ION PLANN NGI I
-emission planning entails the integration of mission r equir
ements o r objectivestem and crew capabilities and constraints. The
integration is time varying be-?ither mission req uir ehe nts nor
system performances remain static. This has-titularly true of the d
M descent and ascen t maneuvers, which wer e in designning fo r 7
years . II I
thi s section, the final evolution of the planning for the
descent and ascent ma-for the Apollo 1'1mission will be descr ibed.
A brief descr iption of the per ti-tems, the guidance logic, the
operational-design phases, the trajectoryIristics, and the AV and
propellant requir ement s for each maneuver isx.~
,
-
8/8/2019 Lunar Module Descent and Ascent
9/24
Descen t P lann ingThe LM descent from the CSM park-ing orbit
(approximately 62 by 58 nautical
miles) is illustrated in figure 1. After theLM and the CSM have
undocked and sepa-rated to a safe distance of se ve ra l
hundredfeet, the LM performs the DOI, which isthe first and
simplest of the two descentmaneuvers . The DOI, which is a shortret
rog rad e maneuver of approximately7 5 fps, is performed with the
LM descentengine and is made at a positbi t 180' fr om powered
desce(PDI), which is the second de II
PhaseBraking
ApproachLanding
Figure 1.1- Lunar module descerer . The purpose of the DO1 is to
reduceefficientlv (with Hohmann-type transfer) I
Design criteriaHigh gate Crew visibilityLow gate Man ual
control
Initial eventPDI Minimi ze propellant usage
the orbit "altitude fr om approximately60 nautical mil es to 50
000 feet in prepara tion for PDI. Performance of continuopowered
descent fro m altitudes much gre ater than 50 000 f k e t is
inefficient, and :at lower than 50 000 feet is a safety hazard
(ref, 3). The DO1 isldescribed i n theonerational trai ectorv
documentation at the NASA Manned Spaceckaft Center and !
I
tby
)
.kingI n
,.SPDI3d:lscussed furt
-
8/8/2019 Lunar Module Descent and Ascent
10/24
System descriptions. - The success of the LM powered descent
depends on thesmooth interaction of s eve ral sys tem s. The
pertinent systems are the primar y guid-ance, navigation, and
control sys tem (PGNCS); the descent propulsion system (DPS);the
reac tion con tro l syste m (RCS); the landing rada r (LR); and the
landing point desig-nator (LPD). A detailed description of each
system and its performance characteris -tics is given in reference
6. A brief descrip tion of each sys tem follows.
tions,phase
The PGNCS consist s of two major sub syst ems: an inertial meas
urement unit(IMU) and a computer. The IM U is the navigation senso
r, which incorpo rates acce ler-om eter s and gyr os to sens e
changes in LM velocity and attitude. The IM U sends thisinformation
to the computer, which contains preprogramed logic fo r navigation,
fo rcalculation of guidance commands, fo r sending steer ing
commands (by means of thedigital autopilot (DAP)) to the DPS and
the RCS, fo r processing LR measurements ofLM range and velocity re
lative t o the lunar s urface, and fo r display of information
tothe crew . The crew con trol s the mode of computer operation
through a display andkeyboard (DSKY) assembly. A description of the
guidance logic is given in a subsequentsection, and a complete
description of the guidance, navigation, and control logic canbe
found in reference 7.
as shown in fig ures 3(c) and 3(d). Position 1 (fig. 3(c)) is
used in the brakingof the descent when the LM is orient ed nea r
the horizontal. Position 2 (fig. 3(d))
4II
-
8/8/2019 Lunar Module Descent and Ascent
11/24
Location of LR
I Bores'ght' (b) Landing ra da r antenna axIi/I
I
'B 'AI
II
z A(c ) Landing radar position 1 (used inbraking phase).
5 .
(d) Landing rada r position 2 (used i napproach and landing
phases ).Figure 3 . - Lunar module body axes and LR antenna
axes.
5
-
8/8/2019 Lunar Module Descent and Ascent
12/24
The final system to be described is agrid on the commander's
forward windowcalled the LPD (fig. 4). The window ismarked on the
inner and outer panes toform an aiming device or eye
position.During the approach and landing phases,the computer
calculates the look angle (rel-ative to the forw ard body axis Z B)
to thelanding site and displays it on the DSKY.The commander can
then sight along theangle on the L PD (ze ro being along bodyaxis Z
) to view the landing area to whichhe is being guided. If the
commander de-s i r e s to change the landing area, he canmake
incremental changes inplane o r c rossrange by moving the hand con
trolle r in theappropriate direction to provide input to t h
ecomputer. C r o s s - range position is changedin 2 increment s,
and inplane position ischanged in 0. 5" increments. A
detaileddescripti on of the guidance logic is given i nreferences 7
and 8.
B
Guidance logic. - ,Thebasic L M de-scent guidance logic i q
defined by an ac-celeration command which is a quadraticfunctidn of
t im e and is, therefore, termedquadratic guidance. A simplified
flow charof quadratic guidance is given in figu re 5.The curren t L
M position and velocity vec-to r s 6 and I? a r e determined fro m
thenavigation routine. The des ired (or target)positidn vector I$
velocity vector tsD,acceleiation vector A and ,down-rangecomponent
of je rk jthe std red memory. (Jerk is the time
IAD'I are obtained fromDZ
(looking outboardl
Figure 4. - Lunar module forwar dwindow.
Throttle DA P
Figure 5. - Basic LM descent guidancelogic.
d e r i v a p e of acceieration. ) :The down- range (horizontal)
components of t he se statevecto rs (current and desir ed)iar e
used in the jerk equation to determine the time to go(TGO);! that
is , the time to go from the curren t to the de sir ed conditions.
If th e TGO,the current state vector, and 'the desir ed s tat e
vector are known, then the commandedacceleration vector A is
determined from the quadratic guidance law. Note that theacceler
ation- command equation yields infinite commands when the TGO rea
ch es zero .For this reason, the targeting is biased such that the
de sir ed conditions a r e achieved
A
CIIreaching zero. By using spacecraft mass M, calculating the v
ectorce between the commanded acceleration and the acceleration of
lunar gravity A ,
Newton's law, a commanded thrus t vector TC can be found.
The6
-
8/8/2019 Lunar Module Descent and Ascent
13/24
IImagnitude of TC is used to provide automatic throttling of the
DPS. When:the tbrottlecommands exceed the throttl e region of the
DPS (10 to 60 percen t of design thrust ),maximum thrust (FTP) is
applied. The vecto r direction is,use d by the DAP to orie ntthe
DPS thrus t by either tr im gimbal attitude commands o r RCS
commands to re oh en tthe entire spacecraft.
I ,
I
During the powered descent, the guidance computer provides se ve
ral se qu eh ia lpro gra ms (P63 to P67) fo r guidance and control
operations. A description of each pro-gra m follows. A complete de
scrip tion of the desc ent guidance logic and guidancelmodesis
given in references 7 to 9. The first program is P63, entitled
"Braking Phase Guid-ance. '( Pr ogr am 63 contains an ignition
algorithm and the basic;guidance logic. Theignition logic, which
dete rmines the time for the c rew to ignite the DPS fo r PDI,
fsbased on a stored, preselected surface range to th e landing
site.$ After descent-engineignition, the bas ic guidance logic is d
to steer the L M to the +s ire d conditions forthe beginning of the
approach phase. stat ed previously; the targets are selecdedwith a
bias such that the des ire d conditions are achieved pri or to the
TGO reaching zero.When the TGO reac hes a prese lecte d value, the
guidance pro gra m switches automati-cally fr om P63 to P64, which
is entitled ('Approach P hase ' Guidance. " Pr og ra m 164contains
the sa me ba sic guidance logic as P63, but a new set of targets is
selected toprovide traj ect ory shaping throughout the approach and
landing phase s and to estqblishconditions f or initiating an
automatic verti cal descent fr om a low altitude to landing.
Inaddition, P64 provides window-pointing logic for the LPD
operaqon. That is, the land-ing point will be maintained along the
LPD grid an the comma nder' s window. Dutin gthis time, the crew
can make manual inputs with the attituae hand con trolle r to
changeincrementally (down range or cross range) the intended
landing site and remai n in auto-,mati c guidance. (See the sect
ion entitled "System Descriptions./") ~
When the TGO reac hes a preselectedvalue, the guidance progra m
switches auto-matically from P64 to P65, which isentitled "Velocity
Nulling Guidance."Program 65, which nulls all components ofvelocity
to prese lecte d values, is used foran automatic vertic al descent
to the sur -face, i f des ire d. No position control isused during
this guidance mode. The se -quencing fo r automatic guidance is
illus-
~
20=4
trated in figure 6. Range'Guidance P6 5 IS velocity nulling
only
Pr og ram 66, entitled "Rate of De- ( 1 . e . . no position
target1scent, ( ' and program 67, entitled "ManualGuidance, " a r e
optional modes which canbe used at crew d iscre tion (manually
calledup through the DSKY) at any time duringthe automat ic
guidance modes (P63, P64,or P65). During P66 operation, the crew
control space craft attitude, and the computercommands the DPS thro
ttle to maintain the des ired altitude rate. This ra te can be
ad-justed by manual inputs from the crew and is normally entered
late in P64 operation(near low gate) pr io r to P65 switching fo r
manual control of the final touchdown position.Pr og ra m 67
maintains navigation and display operations fo r complete manual
control ofthe throt tle and altitude. Normally, this mode is not
used unless P66 is inoperative.
Figure 6. - Target sequence forautomatic-descent guidance.
7
-
8/8/2019 Lunar Module Descent and Ascent
14/24
formesurfacdatingis exp
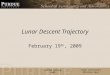
Braking phase. - A scale drawing of the LM powered descent for
the Apollo 11mission is given in figure 7. The intended landing
area, designated Apollo site 2, inthe Sea of Tranquility is
centered at latitude 0.6" N and longitude 23.5" E. The majorevents
occur ring during the braking phase ( illustrated in figure 7 and
tabulated intable I) are discussed as follows. The braking phase is
initiated at a preselected rangeapproximately 260 nautical miles
from the landing site near the perilune of the descenttr an sf er
orb it (altitude of approximately 50 000 feet). This point is PDI,
which coin-cid es with DPS ignition. Ignition is preceded by a
7.5-second RCS ullage burn to settlethe DPS propellants. The DPS is
ignited at tr im (10 percent) throttle. This throttlesetting is
held for 26 seconds to allow the DPS engine gimbal to be alined (or
trimmed )through the sp acecraft center of gravity before
throttling up to the maximum or fixedthrottle position. The braking
phase is designed for efficient reduction of orb it
velocity(approximately 5560 fp s) and, therefore, uses maximum thru
st for most of the phase;however, the DPS is throttled during the
final 2 minute s of th is phase fo r guidance con-tr ol of
dispersion s in thrust and trajecto ry. As stated earlier, the DPS
is throttleableonly between 10 and 60 percent; therefore, during
FTP operation, the guidance is tar-geted such that the commanded
quadratic accelerat ion, and consequently the commandthrust, is a
decreas ing function. When the command dec rea ses to 57 percent,
a3-percent low bias, the DPS is throttled as commanded (illustrated
by the time historyof commanded and actual thrus t shpwn in fig.
8(a)). The thr ust attitude (pitch) profileis shown in figure 8(b).
Ea riy in the descen t, orientation about the thr us t axis is
bypilot discretion. The Apollo 11 crew oriented in a windows-down
pttitude fo r visualground tracking as a gr os s navigation check.
Rotation to a windows-up attitude is per-
I at an altitude of approximately 45 000 feet, so that the LR
can acquire the lunar3 to update the guidance computer es tima te s
of altitude and velocity. Altitude up-is expected to begin a t' an
altitude of approximately 39 000 feet; velocity updatingcted to
begin at approximately 22 000 feet.
0@-io'-
I I I11.54 8 7Th
8
618 sec
4 :Begin
I East lunarlongitude
Altitude12-n. mi.
28"6 5
circled letters correspond to the events listed in table
1III
I -1IFigure1 7. Premission Apollo 11 LM powered descent.
._
-
8/8/2019 Lunar Module Descent and Ascent
15/24
TABLE I. - APOLLO 11 PREMISSION POWERED-DESCENT E V E N T
SUMMI
Event
UllagePowered descent initiationThrottle to maximum thr
ustRotate to windows-up positionLR altitude updateThrottle
recoveryLR velocity updateHigh gateLow gateTouchdown (probe
contact)
TFI,min: sec(a)-0: 7
0: 000: 262: 564: 186: 246: 428: 26
10: 0611:54
"Time fr om ignition of the DPS.
Inertialvelocity,fPS
556055294000306514561315,506b55(68)
b-15(0)
Altituderate,fPS
-4-3
- 50I-89
-1061
I-127-145-16
I
- 5
Altitude,f t
48 81448 72544 93439 20124 63922 644
7 515 ~51212
I
IbHorizontal velocity relative to the lunar surface. I,
M lo3I -Actual Commanded---16 r\. 30 dispersionI throttle
recovery
e ..1' -'\,H\ \
r \'Ti4
031
1572253642 394399537561766775
-m2>Ee-Sco.
Time from ignition, minTime f r o m iqnition. min
(a) Thrust. (b) Attitude.Figure 8. - Premission Apollo 11 tim e
history of thru st and attitude.
9
-
8/8/2019 Lunar Module Descent and Ascent
16/24
-
8/8/2019 Lunar Module Descent and Ascent
17/24
upon making surface contact, activate alight which signals the c
rew t o shut downthe DPS manually, whether automatic ormanual
guidance is being used . The landing-phase trajectory is shown
under automaticguidance in figure 10.Premiss ion estimates of
dispersionsin landing position a r e shown in figure 11.These
dispersions, which are based on aMonte Car lo analy sis, include
all knownsys tem performances as defined in re fer -ence 6. Based
on thi s analy sis, the99-percent-probability landing ellip se
wasdetermined to be f 3.6 nautical miles in-plane by & 1. 3
nautical miles c ro ss range.
Cross range,n. mi .
Forward window view
loo0800
e7 6005'B 400
200I
0 4w 800 1200 lboo 2000 2400I I I I I
Range, ft0 .1 . 2 . 3 .4
Range, n. mi .I 1 I I I11:54 11:OO 10:40 1o:zo 1o:oo
TFI . rnin:sec
Figure 10. - Landing phase.
. -
Figure 1.1.- Predicted Apollo 11 landing dispersions.The AV and
propellant requirements. - The AV and propellant requireme ntsa r e
determined by the nominal trajectory design, contingency re quirem
ents, and dis-persions. Consequently, these requir eme nts have
undergone continual change. Thefinal operation requirements are
given in table 11. The required 6827-fps AV is e s -tabl ished by
the automat ically guided nominal. In addition, 85 fp s is added to
assure2 minutes of flying time in the landing phase, that is ,
below an altitude of 500 feet.The automatic guidance requi red only
104 seconds of flying time for the landing phase.Also, a 60-fps A V
is added for LPD operation in the approach phase to avoid largecr
at er s (1000 to 2000 fee t in diamet er) in the landing ar ea .
Contingency propellantallotments a r e provided fo r failure of a
DPS redundant propellant flow valve and forbia s on propellant
low-level-light operation. The valve failure causes a shift in
thepropellant mixture ratio and a lower thrust by approximately 160
pounds, but otherwise,DPS operation is sati sfac tory. The
low-level light signifies approaching propellant de-pletion;
therefore , a bias is used to protect against dispersi ons in the
indicator. If thelow-level light should fail, the cre w use s the
propellant gage reading of 2 percent r e -maining as the abort
decision indicator. The light se ns or provides more accuracy
and
i
\
11
\
-
8/8/2019 Lunar Module Descent and Ascent
18/24
is ther efor e pre fer red over the gage reading. The ground
flight con trol lers c all outtim e fro m low-level light ''on'' to
inform the crew of impending propel lant depletion fora
land-or-abort decision point at least 20 seconds before depletion.
This proced ureallows the crew t o start arr es tin g the altitude
rate with the DPS pri or to an abort s tageto prevent surfac e
impact. The allowance for disp ersions is determined fro m the
MonteCarl o a nalysi s mentioned previously. A s can be seen in
table II, the AV and propel-lant requirements are satis fied by a
positive margin of 301 pounds. Thi s marg in canbe converted to a n
additional hover o r t ransla tion time of 32 seconds.
TABLE 11. - APOLLO 11 PREMISSION DESCENT AV ANDPROPELLANT
REQUIREMENTS
Item
UnusAvaiNomDispPadContE1RIRM
M a r-
tbleLble for AV I
. Iial required for AV (6827 ps)rsions (-30) I
ngencie s Igine-valve malfunctionl
~dline low-level sensor~designation (60 ps ) I
nual hover (85 ps) Iin I
I
I
,I
Propellant required,lb
- -75.4
250.5- -
l a , ,16 960.9292.0- -
64.768.7102.9144.0- -
Propella nt remaining,lb
18 260.518 185.117 934.617 934.6
973.7681.7681.7
617.0548.3445.43.01.301.4
7051.2 pounds of fuel land 11 209.3 pounds of oxidizer.Fuel
offload of 75.4 pounds to minimize malfunction penalty.
13
I
-
8/8/2019 Lunar Module Descent and Ascent
19/24
A s c e n t PlanningA sketch of the LM ascelunar surfa ce is
given in fig ure 12 . Theascent has a sing le objective, namely, t
o
achieve a satisfactory orbit f ro m whichrendezvous with the
orbiting CSM can sub-sequently be perfo rmed. Nominally, in-sertion
into a 9- by 45-nautical-mile orbit ,at a tr ue anomaly of 18' and
an altitude of60 000 feet, is des ired. The time of lift-off is
chosen to provide the pro per phasingfo r rendezvous. A desc
ription of thepowered ascent, not the choice of targ etingfor
rendezvous, is the subject of thi ssection.Figure 1 2 . -
Prernission ApollcI LMascent .
System descriptions. - 'Only thr ee pertinent sy ste ms ar e
required fo r ascethe PGNCS and RCS, which have already been
described, /and tly ascent propulssystem (APS). The APS, unlike the
DPS, is not throttleTble and does not have 2gimbal drive , but
provides a constant thru st of approximately 3500 pounds throuthe
ascent (ref. 6). Engine throttling is not required durfng ascent,
because dorange position control is not a target requirement; that
is, only/ altitude, velocitorbit plane are required for targeting.
' This thrust can bb enhahced slightly (byimately 100 pounds) by
the RCS attitude control. The ascent DAP logic is suchbody positive
X-axis (along the thrus t d irection) jets a r e fired fo r
attitude contrIascent. IA fourth sy ste m, the a bor t guidance sys
tem (AGS), should also be mentioiThe AGS is a redundant guidance
syst em to be used fo r guidance, navigation, ar
\\\ un
tI. orbit)
11
t -Intr imhoutn-, andtpprox-iat only1 during
!d.con-tro l for ascent o r ab or ts in the eve& of a
failure of the PGNCS! . The AGS has its owncomputer and uses
body-mounted se ns or s instead of the inertia l sen so rs as used
in thePGNCS. A deta iled description of the AGS is given in
references 11 and 1 2 .Operational phases. - The powered ascent is
divided into two operational p hases:vertical ris e and orbit
insertion. The vert ica l-ri se phase is required to achieve
ter-rai n clearan ce. The trajec tory f or propellant optimization
takes off along the lunarsurfa ce. A description of traject ory p
ara me ter s and LM attitude during the vertical-ri se phase and
during the transition to the orbit-inse rtion phase is shown in
figure 1 3 .The guidance switches to the orbit-insertion phase when
the radial rate becomes 40 fps.However, because of DAP ste er in g
lags , the pitchover does not begin until a radial rateof
approximately 50 fps is achieved. This delay means that the vertic
al-ri se phase isterminated 1 0 seconde after lift-off. Also,
during the verti cal ri se , the LM body
Z - a x i s is rotated to the de si re d azimuth, which is
normally in the CSM orbit plane.The orbit-insertion phase is
designed for efficient propellant usage to achieveorb it conditions
for subsequent rendezvous. The orbit -insertion phase, the tota
lascent-phase performance, nsertion orbit param eters , and onboard
displays at inser-tion are shown in figure.14 The onboard-display
values reflect the computer-estimated
values. If required, yaw steering is u s ring the
orbit-insertion phase to maneuverthe LM into the CSM orb it plane
or into a plane parallel with the CSM orbit. In the13
-
8/8/2019 Lunar Module Descent and Ascent
20/24
nominal case, no yaw stee ring is require d. The nominal ascent
burn time is 7 minutes18 seconds w i t h a 3a disper sion of ? 17
seconds. The trajecto ry dispersions areplotted in figu re 15. The
ascent guidance logic is discus sed in the following section.
1(
14
"2--,o 12-.-".-
b- 10
8
64
O 2
Fif
guidarbecau,For tlsimp11stage,verticto 40descei
I Guldanceswitch
is a lit e r m i14
- .
- 20-640
- 60-480
-400 ral=
-320
- 240- 160
-8 0
100c b ,160 80 0 -80 -160Down-range powtion. ft II
Ire 13. - Prem iss ion Apollo 11vert ical-r ise bhase.II
hida nce logic. - iThe asc ent-:e logic commands onlv
attitude.
Ascent burn out coast to45-11, mi. apolune
Orbit-insertion phase
End vertical rise
Total ascent:Burn time = 7 min 18 secAV required = 6060
fpspropellant required - 4934 Ib
Insertion orbit parameters Onboard displaysat insertionHeight at
perilune, h_ - 55 OOO 11PHeight at apolune. ha - 45 n. mi.True
anomaly, , 180Flight path angle, Y = 0. f V = 5535.6 fpsh li 60
085.4 ftti - 32.2 fps
Figure 14. - Prem iss ion Apollo 11orbit- inser ion
phase.Insertion -lo3
6 0 -
50-c
$40--=30-
Terrainestimates, ,
Schmidt7 ---J30
0 20 40 60 80 lo o 120 140 160 180 200Range, n. m i.Figure. 15.
- Predic ted Apollo 11ascent dispersions.e no engine throttling l's
required.
? vertical-r ise phase, the logic is. The initial attitude is
held for 2 seconds in orde r to clear the L M descentthe attitude
is pikhed to the vertica l while rotating to the desire d azimuth,
andI-ri se- phas e ter'mination occ urs when the altitude rate is
grea ter than o r equalIS pward, or when the altitude is grea ter
than 25 000 feet (used for aborts fr omt.
i
'he insertion-phase guidance logic is defined by an acce lera
tion command whichear function of ti me .and is, therefore, termed
linear guidance. The TGO ised as a function of velocity to be
gained; that is, the difference between th
-
8/8/2019 Lunar Module Descent and Ascent
21/24
I
vated to cut off the APS at the desired time. II I
Propellant required,lbtem
,1 II
TABLE ILI. - APOLLO 11PREMISSION ASCENT AV ANDPROPELLANT
REQUIREMENTS
'1
Propellant remaining,lb
I UnusableAvailable for AVNominal required for AV ( 6 0 5 5 .7
fps)Dispersions (-30)PadContingencies
Engine-valve malfunctionPGNCS o A M switchover (40 fps)
56 . 3 5167 .4-- 5 1 6 7 .4
4 9 6 6 .7 200.766 . 7 1 3 4 . 0_ - 1 3 4 .01 8 . 8 1 1 5 . 22 3
.8 9 1 .4
1 I
Abort from touchdown(AW = + 1 1 2 .9 lb,A(AV)= - 1 4 . 3
fps)
System capacitya I -- 1 5 2 4 4 .4
4 8 .2
Offloadedb I 2 0 . 7 1 5 2 2 3 .7
Maran I - - I 4 8 .2I I' 2028 .0 pounds of fuel and 3218 .4
pounds of oxidizer.bF'uel offload of 20 . 7 pounds o minimize
malfunction penalty.
15
-
8/8/2019 Lunar Module Descent and Ascent
22/24
required 6056-fps AV is established by the nominal insertion
into a 9 - by 45-nautical-mile orbit. In addition, a 54-fps AV is
provided fo r two contingencies. A 40-fps AVis provided fo r the
first contingency, which is a switchover f ro m PGNCS to AGS for
in-se rti ng fro m an off-nominal traject ory caused by a
malfunctioning PGNCS. A 14-fpsAV is provided for the second
contingency, in which the thrust -to-weight rat io is re -duced in
an abort fro m a touchdown situation wherein the LM ascent stage is
heavierthan the nominal ascent -stage lift-off weight. Some weight
is nominally off-loaded onthe lunar surf ace . Also, 19 pounds of
propellant is allotted for contingency engine-valve malfunction, as
in the descent requirements. The allowance for dispers ions
isdetermined from the Monte Carlo analysis. A s can be-seen in
table 11, the AV andpropellant r equireme nts are satisfied with a
positive marg in of 48 pounds.
REAL-T IME ANALY S ISDuring the real- time situation, monitoring
of the spac ecra ft sys te ms and of thetrajectory is performed
continually both on board by the cr ew and on the ground by
theflight cont roll ers. The real-time monitoring determines
whether the mission is to becontinued or aborted, as established by
mission techniques pr io r to flight. The re al -
time situation for the Apollo 11 descent and ascent is described
in the following section.D e s c e n t O r b i t In s e r t i o
n
The DO1 maneuver is performed on the fa rs id e of the moon at a
position in theorbit 180" prior to the PDI and is , therefo re,
executed and monitored sole ly by thecrew. Of major concern during
the burn is the per formance of the PGNCS and the DPS.The DO1
maneuver is essentially a retrograd e burn to reduce orbit altitude
fro m approx-imately 60 nautical miles to 50 000 feet for the PDI
and requi res a velocity reduction of75 fps. This reduction is
accomplished by throttling the DPS to 10-percent thrust for15
seconds (center-of-gravity trimming) and to 40-percent th rus t for
13 seconds. Anpriorby rarthe m;with tlthe b u
systergrouncsiblemust 1guidardesce
16
overburn of 1 2 fps (or 3 seconds) would cause the LM to be on
an impacting trajectoryPDI. Thus, the DO1 is monitored by the cre w
with the AGS during the burn and?-rate tracking ;with the
rendezvous r ad ar (RR) immediately after the burn. Ifeuver is
unsat isfactory, an immediate rendezvous with the CSM is
performedAGS. For Apqllo 11, this maneuver w a s nominal.
Down-range resi dua ls aft er
1 were 0.4 fps. ,I
P owered Descenth e powered descen t is a complex maneuver which
is demanding on both cr ew andperformances. 1 Therefore, as much
monitoring as possible is performed on theto reduce crew activities
and to u s e sophisticated computing techniques not pos-board.
Obviously, however, time-cri tical fai lures and near -sur face
operations1 monitored on board by the crew fo r immediate action.
Pertinent aspec ts ofe, propulsion, and rea l- tim e monitoring of
flight dynamics during the poweredare given as follows.
I
-
8/8/2019 Lunar Module Descent and Ascent
23/24
The PGNCS monitoring. - To determ i degraded performance of the
PGNlground flight con tro lle rs continually comp the LM velocity
components ,cornpithe PGNCS with those computed by the AGS and with
those determined on the grcthrough Manned Space Flight Network
(MSFN) tracking. That is, a two-out-of-tvoting comparison logic is
used to de NCS o r the AGS isgrading. Limit o r redlines for 'veloc
he PGNCS and th e Mcomputations and between the PGNCS and the AGS c
ns/ar e establishedthe mission, based on the ability to abort on
the PGNCS to a safe (30 OOOlfoot pcorbit.
In rea l time, the Apollo 11 PGNCS and AGS performance kas close
to nonhowever, a la rg e velocity difference in the radia l
directio n of 18 fps (limit linewas detected at PDI and remained
constant well into the burn. iThis e r r o r did ncate a sys tem s
performance problem, but rath er an initialization e r r o r in
downposition. This effect is illustrated geometrically in figure
16. 1 The PGNCS posRE and velocity ?E estimates are used to
initiate the MSFN dowered-flight prThe MSFN directly senses the
actual velocity VA at the ;actuad position RA, bihaving been
initialized by the PGNCS state, the MSFN applies )A at RE.
ThLflight-path-angle error A is introducedby a down-range position
e r r o r and shows
I 1
2
A 2
A
Y ,I
S, theted byind.reele-IF Ntefore:ilune)
.nal;t indi-range:ion)cesser.
t 35 fps)
- 9
i, a
Aup as a radial velocity difference AVDIFF.The magnitude of the
velocity d ifference in-dicates that t he Apollo 11 LM
down-rangeposition was in e r ro r by approximately3 nautical miles
at PDI and throughout thepowered descent to landing. The rea sonfor
the down-range navigatattributed to se ver al sma llThese inputs w
ere f ro m uncoupled RCS at-titude maneuvers and cooling sy stem
vent-ing not accounted for in the prediction of thenavigated state
at PDI.ing computation ta sk s: navigation, guidance, displays, ra
da r data processing, andauxiliary tasks. If the computer becomes
overloaded o r falls behind in accomplishingthese tasks, an ala rm
is issued to inform the crew and the flight contr oller s, and
pri-or i t ies are established so that the more important tas ks a
re accomplished first. Thisalarm system is termed "computer restart
protection. 'I During real time, because ofan improperly defined
inte rface, a continuous signal was issued to the LGC from theRR
through coupling da ta units. Thes e signals caused the LGC to
count pulses contin-ually in an attempt to slew the RR until a
computation time interval w a s exceeded. Asa result, the ala rm w
a s displayed and computation priorities were executed by the
com-puter. The ala rm was quickly interpreted, and flight-contro l
monitoring indicated that
the spacecraft state in coasting flight. Center of moonFigure
16. - Effect of position er r o r onvelocity comparison.
The LM guidance computer (LGC) ls o monitors the speed at which
it is perform-
17
-
8/8/2019 Lunar Module Descent and Ascent
24/24
guidance and navigation functions were being perf ormed
properly; thus, the descent w a scontinued. In sp it e of the
initial position e r ro r and the RR inputs, the PGNCS per form
edexcellently during the Apollo 11 powered descent.
diver@tory, (isfaccfor thivideseven vHowevGTC ttweension
rabortthe AgnearlyPGNC
The DPS and PGNCS interface . - To determine in real tim e if
the DPS is providingsufficient thrust to achieve the guidance tar
gets , the.flight co ntro lle rs monitor a plot ofguidance thrust
command (GTC) as a function of hor izonta l velocity, as s hu re
17. Nominally, the GTC de cr ea se s almos t parabolically fr om an
initi160 percent of design thrust to the throttleable level of 57
percent, approximately2 minutes (horizontal velocity being 1400 ps
) before high gate (horizontal velocity being500 ps). If the DPS
produces off-nominal high t h r u s t , horizo ntal velocity is
being re -duced more rapidly than desired to reach high-gate
conditions. Therefore, the GTCdrops to 57 percent earlier with a
higher-than-nominal velocity to guide to th e desiredposition and
velocity tar get s. This early throttledown r es ul ts in
propellant inefficiency.If the DPS produces off-nominal low thrust
, horizontal velocity is not being reducedrapidly enough. The refo
re, the GTC drops to 57 percent later at a lower velocity toguide
to the de sired position and velocity. This later throttledown
results in incpropellant efficiency (i.e., longer operation a t
maximum thrus t). However, iftledown occ urs pr ior to high gate (p
rogram switch from P63 t o P64), the targets willnot be satisfied,
and the result ing trajec tory may not be satisfactory from the
stand-point of visibility. In fact, fo r extremely low thru st, the
guidanceisolution or the GTCcan diverge (fig. 17); as TGO
becomessmall, the guidance call s for more and morethrust in or der
to achieve its targets. This-
2 0 0 .ic e can result in an unsafe traiec- leoL '\. T\..Ie from
which an abort!cannot be sat-ily per form ed. The 2;minute b
iasttle recov ery before high gate pro-tfficient marginfor 3a low
thrustch propellant valve ma,Hunction.r, the flight contr olle rs
monitor theassure satisfacdory in ter face be-PS and PGNCS
operation. A mis-e was established that, called for anwed on the
GTC'divergence. During110 11 anding, the DPS th rus t w a siominal
(fig. 17); thus,, no DPS andinterface problems were
encountered.
PD
----- 3 0 disprsions9350
Horizontal velocity, fps\Figure 17. - Guidance -thrust commandas
a function of hor izonta l velocity.
estimpersicdescewheremissiscentestabl
concealtituc18
I
Ihe LR and PGNCS int4rface. - Normally, the LR update of the
PGNCS alt itudee is expected toioccuriby crew input at an altitude
of 39 000 +_ 5000 eet (3a dis-). Withou t LR altitude updating,
syst em and navigation e r r o r s are such that thecannot be
safely completed. In fact, it is unsafe to tr y to achiev e high
gatehe crew can visually assess the approach without altit ude
updating. Thus, ai rule for rea l-time oqeration w a s established
that called for aborting the de-:a PGNCS-estimated altitude of 10
000 feet, if altitude updating had not been;bed.i addition to the
concern for the time that init ial altitude updating o ccu rs is
thei for the amount of alt itude updating (i. e. , the difference
between PGNCS and LRdeterminations Ah). If the L M is actually
higher than the PGNCS estima te, the