-
Lunar Transfers and the CircularRestricted Three-Body
Problem
Bennington College Science Workshop
Michael S. Reardon
Visiting Assistant Professor of MathematicsBennington
College
[email protected]
November 30th, 2012
-
Introduction: What is a CubeSat?
CubeSats belong to a class of satellites called nanosatellites:I
dimensions: 10cm10cm10cmI mass: < 1.33kg
Double 20cm10cm10cm and Triple 30cm10cm10cmCubeSats are also
becoming common.
CubeSats are usually constructed using basic kits and are
thenfitted with mission specific technology including:
I CommunicationsI Remote SensingI Propulsion and Navigation
CubeSats piggy-back on larger missions
-
Introduction: What is a CubeSat?
CubeSats belong to a class of satellites called nanosatellites:I
dimensions: 10cm10cm10cmI mass: < 1.33kg
Double 20cm10cm10cm and Triple 30cm10cm10cmCubeSats are also
becoming common.
CubeSats are usually constructed using basic kits and are
thenfitted with mission specific technology including:
I CommunicationsI Remote SensingI Propulsion and Navigation
CubeSats piggy-back on larger missions
-
Introduction: What is a CubeSat?
CubeSats belong to a class of satellites called nanosatellites:I
dimensions: 10cm10cm10cmI mass: < 1.33kg
Double 20cm10cm10cm and Triple 30cm10cm10cmCubeSats are also
becoming common.
CubeSats are usually constructed using basic kits and are
thenfitted with mission specific technology including:
I CommunicationsI Remote SensingI Propulsion and Navigation
CubeSats piggy-back on larger missions
-
Introduction: What is a CubeSat?
CubeSats belong to a class of satellites called nanosatellites:I
dimensions: 10cm10cm10cmI mass: < 1.33kg
Double 20cm10cm10cm and Triple 30cm10cm10cmCubeSats are also
becoming common.
CubeSats are usually constructed using basic kits and are
thenfitted with mission specific technology including:
I CommunicationsI Remote SensingI Propulsion and Navigation
CubeSats piggy-back on larger missions
-
The Project
The Vermont Lunar Lander CubeSat project is a
collaborativeeffort between students and faculty from:
I Vermont Technical CollegeI Saint Michaels CollegeI Norwich
UniversityI University of Vermont
Project Director: Carl Brandon, VTC Featured in an emmy
nominated VT PBS episode of EmergingScience:Out of This World
Goal: Develop a triple CubeSat capable of reaching a 100 kmlunar
orbit and possibly conducting a lunar landing.
2013 test launch to test communications and a guidance
system
-
The Project
The Vermont Lunar Lander CubeSat project is a
collaborativeeffort between students and faculty from:
I Vermont Technical CollegeI Saint Michaels CollegeI Norwich
UniversityI University of Vermont
Project Director: Carl Brandon, VTC Featured in an emmy
nominated VT PBS episode of EmergingScience:Out of This World
Goal: Develop a triple CubeSat capable of reaching a 100 kmlunar
orbit and possibly conducting a lunar landing.
2013 test launch to test communications and a guidance
system
-
The Project
The Vermont Lunar Lander CubeSat project is a
collaborativeeffort between students and faculty from:
I Vermont Technical CollegeI Saint Michaels CollegeI Norwich
UniversityI University of Vermont
Project Director: Carl Brandon, VTC
Featured in an emmy nominated VT PBS episode of
EmergingScience:Out of This World
Goal: Develop a triple CubeSat capable of reaching a 100 kmlunar
orbit and possibly conducting a lunar landing.
2013 test launch to test communications and a guidance
system
-
The Project
The Vermont Lunar Lander CubeSat project is a
collaborativeeffort between students and faculty from:
I Vermont Technical CollegeI Saint Michaels CollegeI Norwich
UniversityI University of Vermont
Project Director: Carl Brandon, VTC Featured in an emmy
nominated VT PBS episode of EmergingScience:Out of This World
Goal: Develop a triple CubeSat capable of reaching a 100 kmlunar
orbit and possibly conducting a lunar landing.
2013 test launch to test communications and a guidance
system
-
The Project
The Vermont Lunar Lander CubeSat project is a
collaborativeeffort between students and faculty from:
I Vermont Technical CollegeI Saint Michaels CollegeI Norwich
UniversityI University of Vermont
Project Director: Carl Brandon, VTC Featured in an emmy
nominated VT PBS episode of EmergingScience:Out of This World
Goal: Develop a triple CubeSat capable of reaching a 100 kmlunar
orbit and possibly conducting a lunar landing.
2013 test launch to test communications and a guidance
system
-
The Project
The Vermont Lunar Lander CubeSat project is a
collaborativeeffort between students and faculty from:
I Vermont Technical CollegeI Saint Michaels CollegeI Norwich
UniversityI University of Vermont
Project Director: Carl Brandon, VTC Featured in an emmy
nominated VT PBS episode of EmergingScience:Out of This World
Goal: Develop a triple CubeSat capable of reaching a 100 kmlunar
orbit and possibly conducting a lunar landing.
2013 test launch to test communications and a guidance
system
-
Low Thrust vs High Thrust
High thrust chemical propellants: Fuel+Oxidizer highpressure
byproduct gases Exhaust Nozzle Thrust
I Hydroxyl ammonium nitrate and methanol monopropellantI 4N of
thrustI Isp = 270sI v budget of 2250 m/s
Low thrust SEP propulsion: Solar Power Strong ElectricFields Ion
Acceleration High Exhaust Velocity
I Xenon Ion SEP systemI 1mN of thrustI Isp 3000sI v budget of
4000 m/s
Figure: JPL Miniature Xenon Ion Thruster
-
Low Thrust vs High Thrust High thrust chemical propellants:
Fuel+Oxidizer high
pressure byproduct gases Exhaust Nozzle ThrustI Hydroxyl
ammonium nitrate and methanol monopropellantI 4N of thrustI Isp =
270sI v budget of 2250 m/s
Low thrust SEP propulsion: Solar Power Strong ElectricFields Ion
Acceleration High Exhaust Velocity
I Xenon Ion SEP systemI 1mN of thrustI Isp 3000sI v budget of
4000 m/s
Figure: JPL Miniature Xenon Ion Thruster
-
Low Thrust vs High Thrust High thrust chemical propellants:
Fuel+Oxidizer high
pressure byproduct gases Exhaust Nozzle ThrustI Hydroxyl
ammonium nitrate and methanol monopropellantI 4N of thrustI Isp =
270sI v budget of 2250 m/s
Low thrust SEP propulsion: Solar Power Strong ElectricFields Ion
Acceleration High Exhaust Velocity
I Xenon Ion SEP systemI 1mN of thrustI Isp 3000sI v budget of
4000 m/s
Figure: JPL Miniature Xenon Ion Thruster
-
Low Thrust vs High Thrust
Figure: Ion Thruster (Image courtesy of Wikipedia Commons)
-
Low Thrust vs High Thrust
Ion Propulsion Advantages vs Chemical Propulsion:1. Lower fuel
mass requirements2. Larger range3. Considered safer for launch with
other satellites
Ion Propulsion Disadvantages vs Chemical Propulsion:1. Longer
transfer times2. Require larger battery/solar panels3. Radiation
damage4. Subject to thruster shutdown due to eclipsing5. Unable to
perform large, nearly instantaneous velocity
corrections
-
Low Thrust vs High Thrust
Ion Propulsion Advantages vs Chemical Propulsion:1. Lower fuel
mass requirements2. Larger range3. Considered safer for launch with
other satellites
Ion Propulsion Disadvantages vs Chemical Propulsion:1. Longer
transfer times2. Require larger battery/solar panels3. Radiation
damage4. Subject to thruster shutdown due to eclipsing5. Unable to
perform large, nearly instantaneous velocity
corrections
-
High Thrust: Direct Transfer (STK)
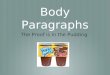
2 Impulse Transfer based on Hoffman transfer1. 1st impulse takes
the CubeSat through the L1 gateway to a
100 km lunar periapsis2. 2nd impulse at lunar periapsis to
circularize the lunar orbit
Segment v (m/s) Time (days)1 1039 4.82 738 -
Total 1777 m/s 4.8
-
High Thrust: Direct Transfer (STK)
2 Impulse Transfer based on Hoffman transfer1. 1st impulse takes
the CubeSat through the L1 gateway to a
100 km lunar periapsis2. 2nd impulse at lunar periapsis to
circularize the lunar orbit
Segment v (m/s) Time (days)1 1039 4.82 738 -
Total 1777 m/s 4.8
-
High Thrust: Direct Transfer (STK)
2 Impulse Transfer based on Hoffman transfer1. 1st impulse takes
the CubeSat through the L1 gateway to a
100 km lunar periapsis2. 2nd impulse at lunar periapsis to
circularize the lunar orbit
Segment v (m/s) Time (days)1 1039 4.82 738 -
Total 1777 m/s 4.8
-
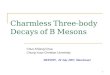
High Thrust: Direct Transfer (STK)
(a) (b)
Figure: Direct transfer to lunar orbit
-
Low Thrust Transfer (STK)
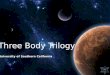
Low thrust transfer similar to the ESA SMART-1 mission1. 1st
series of thrust arcs near perigee to increase the radius of
apogee2. 2nd series of thrust arcs near apogee to raise the
radius of
perigee and ensure temporary lunar capture3. 3rd series of
thrust arcs and spirals to stabilize the lunar orbit4. 4th series
of thrust arcs and spirals to circularize and decrease
the orbit radius
Segment v (m/s) Time (day)1 1157 1832 150 83 450 194 910 155
Total 2667 365
-
Low Thrust Transfer (STK) Low thrust transfer similar to the ESA
SMART-1 mission
1. 1st series of thrust arcs near perigee to increase the radius
ofapogee
2. 2nd series of thrust arcs near apogee to raise the radius
ofperigee and ensure temporary lunar capture
3. 3rd series of thrust arcs and spirals to stabilize the lunar
orbit4. 4th series of thrust arcs and spirals to circularize and
decrease
the orbit radius
Segment v (m/s) Time (day)1 1157 1832 150 83 450 194 910 155
Total 2667 365
-
Low Thrust Transfer (STK) Low thrust transfer similar to the ESA
SMART-1 mission
1. 1st series of thrust arcs near perigee to increase the radius
ofapogee
2. 2nd series of thrust arcs near apogee to raise the radius
ofperigee and ensure temporary lunar capture
3. 3rd series of thrust arcs and spirals to stabilize the lunar
orbit4. 4th series of thrust arcs and spirals to circularize and
decrease
the orbit radius
Segment v (m/s) Time (day)1 1157 1832 150 83 450 194 910 155
Total 2667 365
-
Low Thrust Transfer (STK)
(a) Lunar transfer (b) Lunar spiral-in
-
The CRTBP
Computing lunar transfer trajectories requires a
goodunderstanding of the Circular Restricted Three Body
Problem(CRTBP).
The CRTBP models the trajectory of a massless satellite
subjectto the gravity of two bodies in circular orbits about their
CM
The coordinate system is co-rotating with the massive
bodiesabout their CM
The origin is fixed at their CM The x-y plane is aligned to
their plane of rotation. m1 and m2 are fixed at (x , y) = (, 0) and
(1 , 0)
respectively where = m2/(m1 + m2), m1 > m2.
-
The CRTBP
Computing lunar transfer trajectories requires a
goodunderstanding of the Circular Restricted Three Body
Problem(CRTBP).
The CRTBP models the trajectory of a massless satellite
subjectto the gravity of two bodies in circular orbits about their
CM
The coordinate system is co-rotating with the massive
bodiesabout their CM
The origin is fixed at their CM The x-y plane is aligned to
their plane of rotation. m1 and m2 are fixed at (x , y) = (, 0) and
(1 , 0)
respectively where = m2/(m1 + m2), m1 > m2.
-
The CRTBP
Computing lunar transfer trajectories requires a
goodunderstanding of the Circular Restricted Three Body
Problem(CRTBP).
The CRTBP models the trajectory of a massless satellite
subjectto the gravity of two bodies in circular orbits about their
CM
The coordinate system is co-rotating with the massive
bodiesabout their CM
The origin is fixed at their CM The x-y plane is aligned to
their plane of rotation. m1 and m2 are fixed at (x , y) = (, 0) and
(1 , 0)
respectively where = m2/(m1 + m2), m1 > m2.
-
The CRTBP
Computing lunar transfer trajectories requires a
goodunderstanding of the Circular Restricted Three Body
Problem(CRTBP).
The CRTBP models the trajectory of a massless satellite
subjectto the gravity of two bodies in circular orbits about their
CM
The coordinate system is co-rotating with the massive
bodiesabout their CM
The origin is fixed at their CM The x-y plane is aligned to
their plane of rotation. m1 and m2 are fixed at (x , y) = (, 0) and
(1 , 0)
respectively where = m2/(m1 + m2), m1 > m2.
-
The CRTBP
Computing lunar transfer trajectories requires a
goodunderstanding of the Circular Restricted Three Body
Problem(CRTBP).
The CRTBP models the trajectory of a massless satellite
subjectto the gravity of two bodies in circular orbits about their
CM
The coordinate system is co-rotating with the massive
bodiesabout their CM
The origin is fixed at their CM
The x-y plane is aligned to their plane of rotation. m1 and m2
are fixed at (x , y) = (, 0) and (1 , 0)
respectively where = m2/(m1 + m2), m1 > m2.
-
The CRTBP
Computing lunar transfer trajectories requires a
goodunderstanding of the Circular Restricted Three Body
Problem(CRTBP).
The CRTBP models the trajectory of a massless satellite
subjectto the gravity of two bodies in circular orbits about their
CM
The coordinate system is co-rotating with the massive
bodiesabout their CM
The origin is fixed at their CM The x-y plane is aligned to
their plane of rotation.
m1 and m2 are fixed at (x , y) = (, 0) and (1 , 0)respectively
where = m2/(m1 + m2), m1 > m2.
-
The CRTBP
Computing lunar transfer trajectories requires a
goodunderstanding of the Circular Restricted Three Body
Problem(CRTBP).
The CRTBP models the trajectory of a massless satellite
subjectto the gravity of two bodies in circular orbits about their
CM
The coordinate system is co-rotating with the massive
bodiesabout their CM
The origin is fixed at their CM The x-y plane is aligned to
their plane of rotation. m1 and m2 are fixed at (x , y) = (, 0) and
(1 , 0)
respectively where = m2/(m1 + m2), m1 > m2.
-
The CRTBP
The equations of motion are given by:
x =d
dt
xyzuvw
=
uvw
2v + xU
2u + yU
zU
= F(x)
U =1
2(x2 + y 2) +
1 r1
+
r2
r1 =
(x + )2 + y 2 + z2
r2 =
(x 1 + )2 + y 2 + z2
-
The CRTBP
The equations of motion are given by:
x =d
dt
xyzuvw
=
uvw
2v + xU
2u + yU
zU
= F(x)
U =1
2(x2 + y 2) +
1 r1
+
r2
r1 =
(x + )2 + y 2 + z2
r2 =
(x 1 + )2 + y 2 + z2
-
The Jacobi Energy The Jacobi Energy is given by:
C (x) = x2 + y 2 + 21 r1
+ 2
r2 (x2 + y 2 + z2)
C is constant on all trajectories By setting x = y = z = 0 we
obtain the zero velocity surfaceC (x , y , z) = C
(c) top view (d) side view
Figure: A zero velocity surface
-
The Jacobi Energy The Jacobi Energy is given by:
C (x) = x2 + y 2 + 21 r1
+ 2
r2 (x2 + y 2 + z2)
C is constant on all trajectories
By setting x = y = z = 0 we obtain the zero velocity surfaceC (x
, y , z) = C
(a) top view (b) side view
Figure: A zero velocity surface
-
The Jacobi Energy The Jacobi Energy is given by:
C (x) = x2 + y 2 + 21 r1
+ 2
r2 (x2 + y 2 + z2)
C is constant on all trajectories By setting x = y = z = 0 we
obtain the zero velocity surfaceC (x , y , z) = C
(a) top view (b) side view
Figure: A zero velocity surface
-
The Jacobi Energy The Jacobi Energy is given by:
C (x) = x2 + y 2 + 21 r1
+ 2
r2 (x2 + y 2 + z2)
C is constant on all trajectories By setting x = y = z = 0 we
obtain the zero velocity surfaceC (x , y , z) = C
(a) top view (b) side view
Figure: A zero velocity surface
-
The Jacobi Energy
0.5 0 0.5 1 1.5
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
z
(a)
0.2 0 0.2 0.4 0.6 0.8 1 1.20.5
0.4
0.3
0.2
0.1
0
0.1
0.2
0.3
0.4
0.5
x
(b)
1 0.5 0 0.5 1 1.5
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
z
(c)
1 0.5 0 0.5 1 1.5 2
1
0.5
0
0.5
1
xz
(d)
1.5 1 0.5 0 0.5 1 1.51.5
1
0.5
0
0.5
1
1.5
x
(e)
2 1.5 1 0.5 0 0.5 1 1.5 22
1.5
1
0.5
0
0.5
1
1.5
2
x
y
(f)
Figure: Planar projection of C and sample orbits for decreasing
C
-
Lagrange Points
5 Lagrange points where forces balance (in the
rotatingcoordinate system)
I Solutions to x = F(x) = 0I L1L3 are on located on the x-axisI
L4 and L5 are located at the tips of equilateral triangles
Ideal for observation, communication, and (eventually)
supply
Figure: The E-M Lagrange points (courtesy of Wikipedia
Commons)
-
Lagrange Points 5 Lagrange points where forces balance (in the
rotating
coordinate system)I Solutions to x = F(x) = 0I L1L3 are on
located on the x-axisI L4 and L5 are located at the tips of
equilateral triangles
Ideal for observation, communication, and (eventually)
supply
Figure: The E-M Lagrange points (courtesy of Wikipedia
Commons)
-
Lagrange Points 5 Lagrange points where forces balance (in the
rotating
coordinate system)I Solutions to x = F(x) = 0I L1L3 are on
located on the x-axisI L4 and L5 are located at the tips of
equilateral triangles
Ideal for observation, communication, and (eventually)
supply
Figure: The E-M Lagrange points (courtesy of Wikipedia
Commons)
-
Stabilty
Small displacements x = x xi about the ith Lagrange pointevolve
locally according to the equation:
x = F(xi) + J(xi)x + O(||x||2) J(xi)x (1)
J(xi) is the (constant) Jacobian matrix of F at xi Solutions are
of the form vet where (, v) is an
eigenvalue/eigenvector pair of J(xi)
6 eigenvalues/eigenvectors describe how trajectories
approach,leave, or orbit the fixed point
If Re() > 0, perturbations from Li may grow and the
Lagrangepoint is unstable
L1L3 are unstable, L4L5 are stable
-
Stabilty
Small displacements x = x xi about the ith Lagrange pointevolve
locally according to the equation:
x = F(xi) + J(xi)x + O(||x||2) J(xi)x (1)
J(xi) is the (constant) Jacobian matrix of F at xi
Solutions are of the form vet where (, v) is
aneigenvalue/eigenvector pair of J(xi)
6 eigenvalues/eigenvectors describe how trajectories
approach,leave, or orbit the fixed point
If Re() > 0, perturbations from Li may grow and the
Lagrangepoint is unstable
L1L3 are unstable, L4L5 are stable
-
Stabilty
Small displacements x = x xi about the ith Lagrange pointevolve
locally according to the equation:
x = F(xi) + J(xi)x + O(||x||2) J(xi)x (1)
J(xi) is the (constant) Jacobian matrix of F at xi Solutions are
of the form vet where (, v) is an
eigenvalue/eigenvector pair of J(xi)
6 eigenvalues/eigenvectors describe how trajectories
approach,leave, or orbit the fixed point
If Re() > 0, perturbations from Li may grow and the
Lagrangepoint is unstable
L1L3 are unstable, L4L5 are stable
-
Stabilty
Small displacements x = x xi about the ith Lagrange pointevolve
locally according to the equation:
x = F(xi) + J(xi)x + O(||x||2) J(xi)x (1)
J(xi) is the (constant) Jacobian matrix of F at xi Solutions are
of the form vet where (, v) is an
eigenvalue/eigenvector pair of J(xi)
6 eigenvalues/eigenvectors describe how trajectories
approach,leave, or orbit the fixed point
If Re() > 0, perturbations from Li may grow and the
Lagrangepoint is unstable
L1L3 are unstable, L4L5 are stable
-
Stabilty
Small displacements x = x xi about the ith Lagrange pointevolve
locally according to the equation:
x = F(xi) + J(xi)x + O(||x||2) J(xi)x (1)
J(xi) is the (constant) Jacobian matrix of F at xi Solutions are
of the form vet where (, v) is an
eigenvalue/eigenvector pair of J(xi)
6 eigenvalues/eigenvectors describe how trajectories
approach,leave, or orbit the fixed point
If Re() > 0, perturbations from Li may grow and the
Lagrangepoint is unstable
L1L3 are unstable, L4L5 are stable
-
Stabilty
Small displacements x = x xi about the ith Lagrange pointevolve
locally according to the equation:
x = F(xi) + J(xi)x + O(||x||2) J(xi)x (1)
J(xi) is the (constant) Jacobian matrix of F at xi Solutions are
of the form vet where (, v) is an
eigenvalue/eigenvector pair of J(xi)
6 eigenvalues/eigenvectors describe how trajectories
approach,leave, or orbit the fixed point
If Re() > 0, perturbations from Li may grow and the
Lagrangepoint is unstable
L1L3 are unstable, L4L5 are stable
-
Chaos in the CRTBP
The CRTBP is a dynamical system where knowledge of thepresent
state can be used to uniquely determine any future state
Dynamical systems may exhibit chaotic behavior. Calling cardsof
chaos include:
I Sensitivity to small changes of initial conditionsI
Topological mixingI Periodic orbits are dense in the phase
space
Large C solutions are tightly bound to the earth and moon Small
C solutions, especially those passing near Lagrange points
typically more chaotic
-
Chaos in the CRTBP
The CRTBP is a dynamical system where knowledge of thepresent
state can be used to uniquely determine any future state
Dynamical systems may exhibit chaotic behavior. Calling cardsof
chaos include:
I Sensitivity to small changes of initial conditionsI
Topological mixingI Periodic orbits are dense in the phase
space
Large C solutions are tightly bound to the earth and moon Small
C solutions, especially those passing near Lagrange points
typically more chaotic
-
Chaos in the CRTBP
The CRTBP is a dynamical system where knowledge of thepresent
state can be used to uniquely determine any future state
Dynamical systems may exhibit chaotic behavior. Calling cardsof
chaos include:
I Sensitivity to small changes of initial conditionsI
Topological mixingI Periodic orbits are dense in the phase
space
Large C solutions are tightly bound to the earth and moon Small
C solutions, especially those passing near Lagrange points
typically more chaotic
-
Chaos in the CRTBP
The CRTBP is a dynamical system where knowledge of thepresent
state can be used to uniquely determine any future state
Dynamical systems may exhibit chaotic behavior. Calling cardsof
chaos include:
I Sensitivity to small changes of initial conditionsI
Topological mixingI Periodic orbits are dense in the phase
space
Large C solutions are tightly bound to the earth and moon
Small C solutions, especially those passing near Lagrange
pointstypically more chaotic
-
Chaos in the CRTBP
The CRTBP is a dynamical system where knowledge of thepresent
state can be used to uniquely determine any future state
Dynamical systems may exhibit chaotic behavior. Calling cardsof
chaos include:
I Sensitivity to small changes of initial conditionsI
Topological mixingI Periodic orbits are dense in the phase
space
Large C solutions are tightly bound to the earth and moon Small
C solutions, especially those passing near Lagrange points
typically more chaotic
-
Chaos in the CRTBP
1.5 1 0.5 0 0.5 1 1.51.5
1
0.5
0
0.5
1
1.5
xzz
y
(a) (x , y , z) trajectory
0 10 20 30 40 50 600.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
1.2
t
x(t)
(b) x vs. t
Figure: Sensitivity to initial conditions
-
Chaos in the CRTBP
0.8 0.85 0.9 0.95 1 1.05 1.1 1.15 1.20.2
0.15
0.1
0.05
0
0.05
0.1
0.15
0.2
(a) t = 2.5
0.8 0.85 0.9 0.95 1 1.05 1.1 1.15 1.20.2
0.15
0.1
0.05
0
0.05
0.1
0.15
0.2
(b) t = 5
0.5 0 0.5 11
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
(c) t = 7.5
0.5 0 0.5 11
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
(d) t = 10
0.5 0 0.5 11
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
(e) t = 12.5
0.5 0 0.5 11
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
(f) t = 15
Figure: Topological mixing
-
Chaos in the CRTBP
0.8 0.6 0.4 0.2 0 0.2 0.4 0.6 0.8 1 1.24
3
2
1
0
1
2
3
4
x
x
Figure: A Poincare map
-
Chaos in the CRTBP
0.5 0.45 0.4 0.35 0.3 0.25 0.2 0.15 0.1 0.051
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
x
x
0.4 0.45 0.5 0.55 0.60.5
0.4
0.3
0.2
0.1
0
0.1
0.2
0.3
0.4
xx
0.4 0.45 0.5 0.55 0.60.7
0.65
0.6
0.55
0.5
0.45
0.4
0.35
x
x
Figure: Periodic orbits and the Poincare map
-
Chaos in the CRTBP
z
Figure: Periodic and quasiperiodic orbits
Periodic orbits are fixed points? Stability is determined by the
eigenvalues of the MonodromyMatrix
The eigenvalues/eigenvectors determine how trajectoriesapproach,
leave, or orbit the periodic orbit
-
Chaos in the CRTBP
z
Figure: Periodic and quasiperiodic orbits
Periodic orbits are fixed points?
Stability is determined by the eigenvalues of the
MonodromyMatrix
The eigenvalues/eigenvectors determine how trajectoriesapproach,
leave, or orbit the periodic orbit
-
Chaos in the CRTBP
z
Figure: Periodic and quasiperiodic orbits
Periodic orbits are fixed points? Stability is determined by the
eigenvalues of the MonodromyMatrix
The eigenvalues/eigenvectors determine how trajectoriesapproach,
leave, or orbit the periodic orbit
-
Chaos in the CRTBP
z
Figure: Periodic and quasiperiodic orbits
Periodic orbits are fixed points? Stability is determined by the
eigenvalues of the MonodromyMatrix
The eigenvalues/eigenvectors determine how trajectoriesapproach,
leave, or orbit the periodic orbit
-
Periodic Orbits
The Lagrange points are also surrounded by periodic
orbitsincluding:
I Lyopunov (planar)I Halo (non-planar)I Lissajous
(quasi-periodic)
0.7 0.75 0.8 0.85 0.9 0.95 1
0.1
0.05
0
0.05
0.1
(a) Lyapunov family (b) Halo families
Figure: Periodic orbit families about L1
-
Periodic Orbits The Lagrange points are also surrounded by
periodic orbits
including:I Lyopunov (planar)I Halo (non-planar)I Lissajous
(quasi-periodic)
0.7 0.75 0.8 0.85 0.9 0.95 1
0.1
0.05
0
0.05
0.1
(a) Lyapunov family (b) Halo families
Figure: Periodic orbit families about L1
-
Periodic Orbits The Lagrange points are also surrounded by
periodic orbits
including:I Lyopunov (planar)I Halo (non-planar)I Lissajous
(quasi-periodic)
0.7 0.75 0.8 0.85 0.9 0.95 1
0.1
0.05
0
0.05
0.1
(a) Lyapunov family (b) Halo families
Figure: Periodic orbit families about L1
-
Transfer via Lyopunov Manifolds
Information on how trajectories leave fixed points is useful
forefficient station keeping
It can also be used for transport to/from fixed points
andperiodic orbits along invariant manifolds
0.8 0.9 1 1.1 1.2
0.2
0.15
0.1
0.05
0
0.05
0.1
0.15
0.2
0.25
(a) Unstable Manifold
0.5 0 0.5 1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
x
(b) Stable Manifold
Figure: Lyopunov orbit manifolds
-
Transfer via Lyopunov Manifolds Information on how trajectories
leave fixed points is useful for
efficient station keeping
It can also be used for transport to/from fixed points
andperiodic orbits along invariant manifolds
0.8 0.9 1 1.1 1.2
0.2
0.15
0.1
0.05
0
0.05
0.1
0.15
0.2
0.25
(a) Unstable Manifold
0.5 0 0.5 1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
x
(b) Stable Manifold
Figure: Lyopunov orbit manifolds
-
Transfer via Lyopunov Manifolds Information on how trajectories
leave fixed points is useful for
efficient station keeping It can also be used for transport
to/from fixed points and
periodic orbits along invariant manifolds
0.8 0.9 1 1.1 1.2
0.2
0.15
0.1
0.05
0
0.05
0.1
0.15
0.2
0.25
(a) Unstable Manifold
0.5 0 0.5 1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
x
(b) Stable Manifold
Figure: Lyopunov orbit manifolds
-
Transfer via Lyopunov Manifolds Information on how trajectories
leave fixed points is useful for
efficient station keeping It can also be used for transport
to/from fixed points and
periodic orbits along invariant manifolds
0.8 0.9 1 1.1 1.2
0.2
0.15
0.1
0.05
0
0.05
0.1
0.15
0.2
0.25
(a) Unstable Manifold
0.5 0 0.5 1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
x
(b) Stable Manifold
Figure: Lyopunov orbit manifolds
-
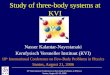
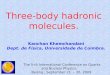
Transfer via Lyopunov Manifolds Example: A Impulse Transfer via
Lyopunov manifolds
1. 1st impulse takes the CubeSat to stable manifold of aLyopunov
orbit
2. 2nd impulse adjusts the velocity to that of the manifold3.
3rd impulse to leave orbit to ensure lunar capture and 100 km
lunar periapsis upon leaving the L1 orbit.4. 4th impulse at
lunar periapsis to circularize the orbit about the
moon
Segment v (m/s) Time (day)1 677 1.62 851 28.33 3 9.44 635 -
Total 2165 39.3
-
Transfer via Lyopunov Manifolds
(a) CRTBP frame (Matlab) (b) Earth frame (STK)
-
Summary
Questions?
Acknowledgements: