-
����M.J.COLEMANDepartment of Mechanical andAerospace
EngineeringCornell University, Ithaca, NY 14853-7501 U.S.A
[email protected]
P.HOLMES
Department of Mechanical and
Aerospace Engineering, Princeton University, Princeton, NJ
08544-5263 U.S.A
Program in Applied and Computational Mathematics
Princeton University, Princeton, NJ 08544-1000, U.S.A
E-mail: [email protected]
MOTIONS AND STABILITY OF A PIECEWISE HOLONOMIC SYSTEM:
THE DISCRETE CHAPLYGIN SLEIGH
Received June 23, 1999
We discuss the dynamics of a piecewise holonomic mechanical
system: a discrete sister to the classical non-
holonomically constrained Chaplygin sleigh. A slotted rigid body
moves in the plane subject to a sequence of
pegs intermittently placed and sliding freely along the slot;
motions are smooth and holonomic except at instants
of peg insertion. We derive a return map and analyze stability
of constant-speed straight-line motions: they are
asymptotically stable if the mass center is in front of the
center of the slot, and unstable if it lies behind the slot;
if it lies between center and rear of the slot, stability
depends subtly on slot length and radius of gyration. As slot
length vanishes, the system inherits the eigenvalues of the
Chaplygin sleigh while remaining piecewise holonomic.
We compare the dynamics of both systems, and observe that the
discrete skate exhibits a richer range of behaviors,
including coexistence of stable forward and backward
motions.
1. Introduction
Although conservative nonholonomic systems lack dissipation,
their constraints can permit these
systems to enjoy asymptotically stable steady motions in certain
cases. In particular, kinematic
couplings due to nonholonomic constraints arise that can
stabilize steady motions. A well-known
example, and the subject of this paper, is the Chaplygin sleigh
(or skate), in which the constraint
couples heading angle rate and velocity, allowing exponentially
stable motions in the plane.
A related class of piecewise holonomic mechanical systems with
intermittent contacts that are
smooth and holonomic everywhere except at instants of transition
are briey discussed in Ru-
ina [17]. Examples of such devices are the uncontrolled,
unpowered walking machines pioneered
by Tad McGeer [11, 12, 13, 7, 6] which exhibit smooth inverted
pendulum-like motions interrupted
by dissipative joint and foot collisions with the ground as they
walk stably and somewhat human-like
down shallow slopes. The model described in this paper was
moreover a motivating example for the
planar legged insect locomotion models of Schmitt and Holmes
[19]. Piecewise holonomic systems such
as these passive-dynamic walkers can be thought of as
nonholonomically constrained in their overall
motion in the following sense: the dimension of the con�guration
space is greater than the instanta-
neous dimension of the velocity space [17]. Such
nonconservative, piecewise holonomic systems can
also exhibit asymptotically stable behavior.
Mathematics Subject Classi�cation
c REGULAR AND CHAOTIC DYNAMICS V. 4, é 2, 1999 1
-
� M. J. COLEMAN, P.HOLMES
�������������������������
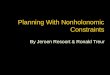
Fig. 1. a) The Chaplygin sleigh and b) the sleigh's discrete
holonomic sister system. A sequence of pegs �xed
to the plane slide frictionlessly in the slot at P . (Schematic
from Ruina [17].)
The question of whether the stability of such systems is due
solely to dissipation, solely to non-
holonomy, or to both was examined in Ruina [17] by studying a
simple 2D example of a smooth
(conservative) nonholonomic system, the Chaplygin sleigh
(Neimark and Fufaev [14]), and comparing
it to a discrete (dissipative) sister system in the limit as
dissipation tends to zero while its piecewise
holonomic nature is maintained. The governing equations of the
discrete system were found to reduce
to those of the smooth system, to �rst order in a characteristic
length; thus, since the eigenvalues
for the smooth skate indicate exponential stability, those of
the discrete system must do likewise.
Eigenvalues for the discrete system were not however calculated
by Ruina [17], so direct stability
comparisons could not be made.
In Sections 3{4 of this paper we further study the discrete
skate, comparing its behavior to
that of the smooth Chaplygin sleigh, the governing equations of
which are reviewed in Section 2. In
the limit as the characteristic length goes to zero, the
discrete system remains piecewise holonomic
while dissipation tends to zero; thus, asymptotic stability of
the discrete system cannot be due to
dissipation, and depends only on the nonholonomic nature of its
discrete holonomy [17]. (The elastic-
legged models of [19] are likewise discretely holonomic;
although these models are controlled, the
energy of control may be made arbitrarily small.) The dynamics
of the discrete skate is remarkably
rich, and we believe that this explicitly soluble example will
further the analysis and understanding
of more complex piecewise holonomic problems.
2. The Chaplygin Sleigh: Smooth Skate Model
We summarize the analysis of the Chaplygin sleigh (see Figure
1(a)). A body has mass m with
center of mass G about which its polar moment of inertia is I.
At point C, a distance ` from G, a
frictionless skate constrains the direction of motion, so that
the velocity of C is vC = vê� and the
force acting on the body at C is F ên. Velocity may be positive
or negative; i. e., the skate can reverse
direction. The angle � speci�es orientation in the inertial
plane. Including rotation, the absolute
velocity of the mass center G is vG = vê� + ` _�ên.
The sleigh is nonholonomic in the following sense: three
coordinates are needed to specify orien-
tation and position on the plane, yet its velocity space is
de�ned by only two variables, velocity of the
contact point along the skate direction and angular speed.
Although its con�guration space is three
dimensional, the skate has only two degrees of freedom at any
instant.
2 REGULAR AND CHAOTIC DYNAMICS V. 4, é 2, 1999
-
MOTIONS AND STABILITY OF A PIECEWISE HOLONOMIC SYSTEM �
2.1. Governing Equations, Steady Solutions, and Stability
We derive the governing equations via linear and angular
momentum balance. Subsequently, we
will discuss its behavior in terms of energy and angular
momentum in order to make comparisons to
the discrete skate. But, to calculate the angular momentum of
the skate as a function of arc length
with respect to a point on the ground coincident at each instant
with a point on the skate blade, we
must solve its di�erential equations of motion. In addition, to
�nd where on its path the skate may
change direction, we will need the velocity of point C as
function of position.
Linear momentum balance and angular momentum balance about C 0,
the non-accelerating point
in an inertial reference frame instantaneously coincident with
point C on the sleigh, yield the following
system of nondimensionalized equations governing the evolution
of V , the speed of point C, and = _�,
the angular rate of the body:
_S = V ; _V = L2 ; _� = ; _ = � LL2 + 1
V ; (2.1)
where
L = `� ; S =s� ; V =
vv0
; = !v0� ; ! = d�
dt; (_) =
d( )
d�; � =
tv0� ; (2.2)
and v0 is the initial speed of point C. The nondimensional arc
length, S, along the path of the skate
contact point C is taken to be positive for forward and backward
motions. Length measures have
been scaled with respect to the radius of gyration
� �r
Im : (2.3)
The nondimensionalization in Equation (2.2) prompts the
following observation. The smooth and
discrete skates belong to a class of particle and rigid body
systems that may interact with any combina-
tion of holonomic or nonholonomic constraints, friction
(possibly anisotropic) proportional to normal
force, collisions with output velocity homogeneous of degree one
in input velocity, and drag forces pro-
portional to velocity squared but without other forces acting on
them (such as those due to gravity,
springs, pre-stresses, linear viscosity). Such systems are
special in that they enjoy velocity scaling;
e. g., double the velocity as a function of position and the
resulting solution is still legitimate [18].
From the viewpoint of non-canonical Hamiltonian systems, the
Chaplygin sleigh can be seen as a
special case of a generalised Toda lattice [2].
The state vector is q = fS; V; �;gT . There is a two-parameter
family of steady solutions:q� = fV ��; V �; ��; 0gT , corresponding
to straight-line motions. In energy-momentum space, these are
H�=C = (1 + L2) 2 = 0 and E� = 1
2(V�)2 : (2.4)
Linearizing the governing equations at q� yields the eigenvalues
�1�3 = 0 and �4 = � LV�
1 + L2. The
�rst three correspond to a family of solutions parameterized by
the velocity V � and heading ��; �4indicates asymptotic stability
for L > 0. However, for L < 0, the skate is unstable.
Stability depends
on whether the mass center lies in front of or behind the
contact point, and its degree, on how far in
either direction.
Equations (2.1) can be solved in closed form for V , �, and as
functions of arc length S and their
initial values (see Appendix A). Trajectories for arbitrary
initial conditions in energy{momentum{arc
length phase space are curves with angular momentum
exponentially growing (L < 0) or decaying
(L > 0) as functions of arc length, and lying in constant
energy planes (see, for example, Figure 4
below).
REGULAR AND CHAOTIC DYNAMICS V. 4, é 2, 1999 3
-
� M. J. COLEMAN, P.HOLMES
3. The Discrete Skate Model
Following Ruina [17], we de�ne a piecewise-holonomic sister
system to the smooth skate: Fi-
gure 1(b). The slotted body slides frictionlessly over a
sequence of pegs inserted in and retracted from
the plane. Motion begins with a peg at one end of the slot,
which slides along the peg until it reaches
the other end, when an \external agent" instantaneously retracts
it without collision and inserts a
new pin at the the starting end, where a collision with the
slot's side may occur. If velocity changes
sign between collisions, the peg is retracted when it returns to
the starting end and the new peg is
instead inserted at the other end. This insertion/retraction
protocol is identical for forward and for
backward motions.
Two mechanical realizations for the external agency are proposed
in Ruina [17]:
1. A frictionless chain on a loop on the body has bumps on its
bottom at regular intervals; one
bump touches the ground at a time acting as a no-bounce, no-slip
contact point without torsional
resistance. The rest of the mechanism is supported by
frictionless contacts. At the instant one
bump leaves the plane, another drops down.
2. A massless, rigid, rimless wheel of large radius is attached
to a body-�xed horizontal axle. A
supporting structure attached to the axle and making
frictionless contact with the ground keeps
the wheel perpendicular to the plane. The rigid spokes make
no-bounce, no-slip collisions without
torsional resistance thus acting as a sequence of
\ball-and-socket joints." The large radius
simpli�es the mechanism by decoupling vertical from in-plane
dynamics, but is not essential.
Such self-contained devices for peg retraction/insertion permit
the discrete skate to be entirely pas-
sively stable, in appropriate parameter ranges, without
requiring active control over peg placement.
As for the smooth skate, the mass center velocity is vG = vê�+
` _�ên, the peg/body force is F ên,
and orientation is given by the rotation angle �. The slot of
length � aligned with ê� slides without
friction, guided by a peg �xed at point iP . Each time a new peg
appears at the front of the slot nearer
to G, a new point i+1P is associated with that location, leaving
a trail of points on the plane as the
body progresses. The velocity v along the slot, may again be
positive or negative.
The distance between G and the front of the slot is `0, which
may be negative; i. e., the mass
center may lie before, within or behind the slot. The distance
from the peg to the front of the slot
is d(t) and the peg's distance to point G is `(t) = `0 + d(t).
For forward motions, sliding starts when
`(t) = `0. When the peg reaches the end of the slot, ` = `0 + �,
it loses contact without an impulse,
and the newly-inserted peg may make a collision at the front of
the slot. If the skate reverses direction
between collisions, the peg starts and ends at `(t) = `0.
Thereafter, the skate goes backwards and
the peg starts at `(t) = `0 + � and �nishes at `(t) = `0, and so
on. In general, the skate can change
direction any number of times.
This system is piecewise holonomic between peg
insertion/retractions; the dimensions of con�gu-
ration space (d(t); �(t)) and of velocity space (v(t); _�(t))
are both two. It can however be viewed as
nonholonomically constrained in overall motion: four coordinates
are required to specify its position
in the plane at any instant (d(t) and �(t) plus peg position),
while the dimension of the velocity space
remains two.
As for the smooth skate, we derive governing equations via
linear and angular momentum balance.
We do this primarily to �nd where along its path the skate may
change direction. Then, since energy
and angular momentum are conserved between peg collisions, it is
more natural and convenient to
write the return map that describes the dynamics in terms of
those quantities. The equations for
evolution of V , the velocity of the skate along the slot, and ,
the angular rate of the body, between
collisions, may be written in nondimensional form as:
_D = V ; _V = (L0 +D)
2 ; _� = ; _ = � 2(L0 +D)
1 + (L0 +D)2V ; (3.1)
4 REGULAR AND CHAOTIC DYNAMICS V. 4, é 2, 1999
-
MOTIONS AND STABILITY OF A PIECEWISE HOLONOMIC SYSTEM �
where we have nondimensionalized as for the smooth skate, with �
=
qIm :
L0 =`0� ; D =
d� ; V =
vv0
; = !v0� ; ! = d�
dt; � =
tv0� ; and (_) =
d( )
d�: (3.2)
We also de�ne a nondimensional slot length, � = �� . The state
vector is q = fD;V; �;gT . Equa-tions (3.1) hold between each peg
insertion and removal; they may be integrated in closed form:
see
Appendix B.1 for details. Moreover, as for the smooth skate,
angular momentum about the peg and
energy are conserved between collisions:
E(D) = 12
hV 2 +
�1 + (L0 +D)
2�
2i= E0 = const ; (3.3)
H=P (D) =h1 + (L0 +D)
2i
= H0=P = const : (3.4)
3.1. Poincar�e Map, Fixed Points and Stability
To study the behavior of this discrete system, we use a
Poincar�e section �. We sample the phase
space at collisions when the distance of the peg along the slot
is d = 0 for forward motions and d = �
for backward motion, and de�ne a map f on � that takes the
system's state just after a collision to
just after the next.
This approach has also been used in other work involving the
dynamics of systems with discon-
tinuous vector �elds, including: hopping robots (Buhler and
Koditschek, 1990 [3]); bouncing balls
(Guckenheimer and Holmes, 1983 [8]); elasto-plastic oscillators
(Pratap, et. al., 1992 [15, 16]); impact
oscillators (Shaw and Holmes, 1983 [20], Shaw and Rand, 1989
[21]); balance wheels and pendula in
clocks (Andronov, et al. [1]); and walking (McGeer, 1991 [13],
Hurmuzlu, 1993 [10, 9], Coleman and
Ruina, 1998 [5, 6], Garcia, et al., 1998 [7]).
The Poincar�e return map takes the form:
i+1q+ = f(iq+) or iq+
fz }| {p�! i+1q� h�! i+1q+: (3.5)
Here the pre-superscript i denotes collision number, and
instants directly before and after collision i
are denoted by post-superscripts (�) and (+); thus iq+ denotes
the state following collision i. f is acomposition of two maps: f =
h � p, where p, obtained by integrating the equations of motion
(3.1),describes the motion following collision i to just before
collision i+ 1, and h governs the jump in the
state vector incurred at collision i+ 1.
To compute f , we must therefore augment solutions of (3.1) by a
collision rule. Since there
are no forces along the slot, the collision impulse acts only in
the ên direction at the new point
P . Let iP denote the pre-collision peg location and i+1P the
post-collision peg location. Then,
neglecting any non-impulsive reactions, angular momentum is
conserved about i+1P , yielding the
following nondimensionalized jump conditions for peg position,
velocity along the slot, angle, and
angular rate (depending on whether velocity prior to collision
is positive or negative):
i+1D+ = �� i+1D� ;i+1V + = i+1V � ;i+1�+ = i+1�� ;
i+1+ =1 + L0(L0 +�)
1 + (L0 + (�� i+1D�))2i+1� ;
(3.6)
REGULAR AND CHAOTIC DYNAMICS V. 4, é 2, 1999 5
-
� M. J. COLEMAN, P.HOLMES
where i+1D� = � for i+1V � > 0 and i+1D� = 0 for i+1V � <
0. In terms of energy and angular
momentum, the collision rule implies:
i+1D+ = �� i+1D� ;i+1E+ = i+1E� � 1
2�2�
1 + (L0 +i+1D�)2
�2 �1 + (L0 + (�� i+1D�)2
� �i+1H�=P�2 ;i+1�+ = i+1�� ;
i+1H+=P
=1 + L0(L0 +�)
1 + (L0 +i+1D�)2
i+1H�=P
;
(3.7)
with state vector q = fD;E; �;H=P gT . Energy and angular
momentum conservation between collisionsare stated as,
respectively, i+1E� = iE+ and i+1H�P =
iH+P . Composing (3.7) with explicit solutions
of (3.1) given in Appendix B.1 (B.1{B.2), we obtain the return
map, which is given in (B.3) and (B.4) of
Appendix B.2 for cases in which velocity reversals respectively
do not and do occur between collisions.
3.1.1. Periodic Motions
For periodic motions of the discrete skate, we must �nd
n-periodic points of the return map,
q� = fn(q�). Periodic motions require no energy loss at
collisions since there are no energy storage or
input mechanisms ( e. g., springs or gravity) in the system to
replenish energy losses.
For H�=P = 0, we get period-1 motions: constant-speed
straight-line solutions (E� = 1
2(V �)2 =
E0 � const) where, as for the smooth skate, the energy is
entirely translational.For zero moment of inertia (� = 0) and a
point mass located behind the front of the slot along the
fore-aft axis of symmetry, period-2 motions can exist for any E�
6= 0 and H�=P
6= 0. This case of zeromoment of inertia is non-physical in the
sense that we consider the motions of a massless structure.
Nevertheless, we include it for curiosity's sake: see Appendix
B.3 and Figure 10.
In addition to the �xed points of the return map, an equilibrium
solution exists without collisions
if the mass center lies within the slot (�� < L0 < 0): the
skate can spin about the peg with constantangular rate when mass
center and peg coincide. This solution has _Veq = 0, Veq = 0, and
eq = const,
implying that Deq = �L0. For Deq = �L0 and V (Deq) = 0, Equation
(B.1) and Equations (3.3){(3.4)give that the post-collision
energy/momentum ratio necessary to achieve this spinning solution
is
2 iE+
(iH+=P)2
= 1 : (3.8)
3.1.2. Stability of Periodic Motions
We carry out a linearized stability analysis. Stability of the
�xed point q� is determined by
the eigenvalues �j of the Jacobian of the return map evaluated
at q�: J � Df(q�). Fixed points
are asymptotically stable if all j�j j < 1. Due to conserved
quantities and rotation and translationinvariance, some of the
eigenvalues are necessarily unity in our case. We consequently
adopt the
de�nition of stability used by Coleman, et al. [4]:
The �xed point q� 2 � is stable if, for any � > 0; there
exists � > 0 such that wheneverjq0 � q�j < �, jqn � q�j <
� for all positive n. It is asymptotically stable if there exists�
> 0 such that whenever jq0 � q�j < �, jqn � q�j < � for
all positive n and lim
n!1qn = y
exists. Note that we do not insist that y = q�, only that jy �
q�j < �; therefore, our useof the term asymptotic stability is
less restrictive than usual. Clearly, if y exists, it must
be a �xed point. Thus, we call a periodic motion asymptotically
stable if, when slightly
6 REGULAR AND CHAOTIC DYNAMICS V. 4, é 2, 1999
-
MOTIONS AND STABILITY OF A PIECEWISE HOLONOMIC SYSTEM �
�����������������������������
Fig. 2. (a) The analytically computed eigenvalue �4 of the
Jacobian evaluated at the limit cycle �xed point for
V � > 0 is shown forL0�
from -4 to 2 and for several values of
�1�
�2between 0 and 1. (b) The dependence of
stability on � and L0 for V� > 0 and V � < 0. The gray
region indicates stability for V � > 0 and the hashed
region for V � < 0; steady motions are unstable for
parameters outside those regions. Note the region in whichboth the
V � > 0 and V � < 0 solutions are simultaneously stable.
disturbed from it, the state asymptotically converges to some
`nearby' periodic motion.
This is the strongest type of stability possible when there is a
family of periodic motions,
since the perturbed point q0 could just as well be a
perturbation of y as of q�.
Stability of Constant-Speed Straight-Line (Period-1) Motions
Since we have a two-parameter family of period-1 �xed points,
two eigenvalues will always be
exactly equal to one. If all other eigenvalues are smaller than
one in magnitude, then the �xed point
is asymptotically stable in the weak sense described above. We
�nd the Jacobian by linearising f
of (B.3) at the period-1 �xed points q� = f0; E�; ��; 0gT :
J � Df(q�) =
0BBBBBBB@
0 0 0 0
0 1 0 0
0@f3
@E1
@f3
@H=P
0 0 01 + L0(L0 +�)
1 + (L0 + (�� D+))2
1CCCCCCCA; (3.9)
where D+ = 0 for V � > 0 and D+ = � for V � < 0. Although
we do not have an explicit expression
for the � component f3, we can still �nd all eigenvalues. The
characteristic equation yields:
�1 = 0 ; �2;3 = 1 ;
�4 =1 + L0(L0 +�)
1 + (L0 +�)2
for V � > 0 ; �4 =1 + L0(L0 +�)
1 + L20for V � < 0 :
(3.10)
These have the following interpretations: (1) �1 = 0 reects the
fact that the initially perturbed
point q0 might lie o� the Poincar�e section �, but the next
iterate q1 lies exactly on �; (2) �2;3 = 1
since our system has a two-parameter family of �xed points; and
(3) j�4j determines stability type.This latter we call the
stability eigenvalue.
REGULAR AND CHAOTIC DYNAMICS V. 4, é 2, 1999 7
-
� M. J. COLEMAN, P.HOLMES
Period-1 Stability Criteria
The expressions for �4 in Equation (3.10) determine stability
criteria in terms of L0 and �. We
consider both V � > 0 and V � < 0. (In fact the system has
a \reection symmetry" about the mass
center: taking L0 to �(L0+�) and V to �V , so we could restrict
to V � > 0 without loss of generality.)Constant-speed V � > 0
straight-line motions are asymptotically stable for:
L0�
> �1 and�1�
�2> �1
2
�1 + 2
L0�
��1 +
L0�
�> 0 : (3.11)
Constant-speed V � < 0 straight-line motions are
asymptotically stable for:
L0
�< 0 and
�1
�
�2> �1
2
L0
�
�1 + 2
L0
�
�> 0 : (3.12)
Figure 2(a) shows the dependence of �4 on the ratios of mass
center location to slot length (L0�) and of
radius of gyration to slot length (�
�= 1
�); to avoid clutter in the plot, we only show the V � > 0
case.
Figure 2(b) shows stability regions in parameter space for both
V � > 0 and V � < 0. Note that, if the
mass center lies within the slot (�� < L0 < 0), open sets
of parameters exist for which (3.11{3.12)are both satis�ed and
forward and backward motions are simultaneously asymptotically
stable.
For the special case of zero moment of inertia (� = 0),
asL0�
! �1 from left or right, �4approaches 1 or �1, respectively, and
the eigenvalues indicate that period-1 motions are asymptot-ically
stable for
L0�
> �12. But, we have the more restrictive condition that the
existence of period-1
motions requires L0 > 0 (so that the skate does not change
direction between collisions). Here is an
example of a system with no dissipation but exponential
stability: at each collision, a gain in energy
of translation along the slot is exactly balanced by a loss in
energy of rotation about the peg, yet
angular momentum eventually decreases to zero!
Period-2 Stability for � = I = 0
The period-2 motions are always just neutrally stable; i. e.,
the eigenvalues of J2 evaluated at
the �xed point are (�1 = 0, �2;3;4 = 1).
Stability of the Spinning Solution
Linearising the system of governing equations (3.1), we �nd that
the spinning solution qeq =
f�L0; 0; �0 +eq�;eqgT is always of unstable saddle type, having
eigenvalues 0 and �eq.
3.1.3. Basins of Attraction
For I 6= 0 almost all initial conditions are attracted to
straight-line constant-speed motions: = 0with either (1) V � > 0
or (2) V � < 0. For any slot length, �, and center-of-mass
position, L0, and
given any initial energy/angular momentum ratio�
2 0E+
(0H+=P )2
�, Equations (B.5{B.8) in Appendix B.2.1
allow explicit computation of (1) velocity reversal positions in
the slot and the sequence(s) of collision
numbers after which reversals occur, and (2) the collision
number after which no further reversals
occur and the skate has settled down to travel in one direction
or the other. We have not calculated
a general expression for that sequence here though it can be
done in principle; it is straightforward
for given parameters and initial conditions. In particular,
Equation (B.5) allows one to specify the
8 REGULAR AND CHAOTIC DYNAMICS V. 4, é 2, 1999
-
MOTIONS AND STABILITY OF A PIECEWISE HOLONOMIC SYSTEM �
���������
�������������
Fig. 3. Basins of attraction where V � > 0 and V � < 0 are
simultaneously stable, for the special caseL0�
= �12.
Here, L0 = �12, � = 1, and iH+=P = 1 (
i+ = 45). The alternating open intervals attracted to either
positive
or negative solutions are shown on the horizontal axis: gray for
V � > 0 and black for V � < 0. Vertical dashed
lines indicate initial conditions attracted to spinning states.
Only iV + > 0 is shown, since the plot is symmetric
about iV + = 0. No reversals or spinning solutions occur for
2i+1E+
(i+1H+=P )2> 1 (iV + > 1=
p5, here).
energy/angular momentum ratio range that must be entered for a
velocity reversal to be possible.
Thus, for L0 > 0, reversals can only occur if
1
1 + (L0 +�)2<
2 iE+
(iH+=P)2
<1
1 + L20; (3.13)
and for L0 < ��:
1
1 + L20<
2 iE+
(iH+=P)2
<1
1 + (L0 +�)2: (3.14)
However, the energy equation (3.3) supplies lower bounds
for�
20E+
(0H+=P )2
�consistent with real velocities:
2 iE+
(iH+=P)2
>1
1 + L20for iV + > 0; 2
iE+
(iH+=P)2
>1
1 + (L0 +�)2
for iV + < 0 ; (3.15)
from this we conclude, for example, that if L0 > 0 and V >
0 initially, no velocity reversal occurs.
If L0 > 0 and V < 0 initially, angular momentum increases
on each collision and a single velocity
REGULAR AND CHAOTIC DYNAMICS V. 4, é 2, 1999 9
-
� M. J. COLEMAN, P.HOLMES
reversal occurs after the n'th collision drops�
2 nE+
(nH+=P )2
�into the range (3.13). Following this V remains
positive and angular momentum decays to zero. Examples appear in
Figures 4 and 5 below (the latter
is actually for L0 < �� < 0 and V > 0 initially, but
the symmetry noted in Section 3.1.2 implies thatthe behavior is
similar if L0 > 0 and V < 0 initially). For �� < L0 < 0
and V > 0 or V < 0, morecomplex behavior may occur, involving
multiple reversals, and Equation (B.6) must be used with care,
since it applies only to cases in which, after�
2 nE+
(nH+=P
)2
�drops into the appropriate range, there is only
one possible reversal point Dc 2 (0;�). See Appendix B.2.1.The
two straight-line solutions V � > 0 and V � < 0 may be
simultaneously stable, as noted in
Section 3.1.2; the case shown in Figure 7 below provides an
example. Given parameters for which
both (3.11) and (3.12) hold, the basins of attraction for the
two solutions are as follows:
1. For 2iE+
(iH+=P )2> 1, no reversals occur and all initial states with
iV + > 0 are attracted to solutions
V � > 0 and, likewise, all iV + < 0 are attracted to
solutions V � < 0.
2. For 0 < 2iE+
(iH+=P )2< 1, initial states iV + of both signs can be
attracted to either V � > 0 or
V � < 0. For each iV +, the initial states fall into an
alternating in�nite sequence of open
intervals in energy/momentum ratio: after one or more reversals,
initial states in a given interval
are attracted to, say, V � > 0 solutions, those in the
adjacent intervals are attracted to V � < 0,
etc. The boundaries of the intervals correspond to solutions
that, after one or more collisions
and reversals, are attracted to the unstable spinning
equilibrium; that is, each initial state in the
sequence eventually maps to one in which 2iE+
(iH+=P
)2� 1, after which no further collisions occur,
the mass center converges to the peg, and the skate spins
inde�nitely about it. As 2iE+
(iH+=P )2! 0,
the width of these intervals decreases. We have not calculated
the sequence in general although
it can be done from Equations (B.3) and (B.4) for given
parameters and initial conditions (the
di�culty, as above, is that multiple reversals may occur).
We illustrate this in Figure 3 for the symmetric case of mass
center at midpoint of the slot�L0�
= �12
�, for which calculations simplify and the sequence of
energy/momentum ratios leading
to spinning can easily be found via a return map for
energy/angular momentum ratio, derived from
(B.3{B.4). Details are given in Section B.2.2. Similar results
hold for di�erent initial angular velocities.
Two Dissipative Systems with Analogous Behavior
The dynamical behavior of the discrete skate is analogous to two
other dissipative systems [18]:
(I) the classical driven pendulum with damping proportional to
speed and constant applied torque [1]
and (II) a rigid rimless spoked wheel con�ned to rolling up- or
downhill in a vertical plane where
energy is dissipated due to the spokes making perfectly plastic
collisions with the ground [4, 5].
Depending on parameters, both these systems can possess
distinct, coexisting, asymptotically stable
states whose basins of attraction are separated by the
(generalised) stable manifolds of unstable
saddle-type solutions.
For the pendulum, the parameter is the torque/damping ratio and
a saddle separatrix divides
the basins of an `overturning' solution (in which the work done
by torque per revolution is balanced
by damping), and a stable rest state. For the wheel (�xing
inertia and spoke number), the parameter
is the slope on which it rolls, and states leading to the wheel
balancing on one spoke separate those
10 REGULAR AND CHAOTIC DYNAMICS V. 4, é 2, 1999
-
MOTIONS AND STABILITY OF A PIECEWISE HOLONOMIC SYSTEM �
leading to downhill rolling with constant angular rate at each
collision (gravity supplying the energy
lost in collisions), from those leading to rocking back and
forth on two spokes and eventually coming
to rest on them after an in�nite number of collisions in �nite
time.
4. Comparing Smooth and Discrete Skates
To compare the stability of the discrete to the smooth skate, we
examine: (1) their stability
eigenvalues in the limit as the slot length goes to zero and (2)
the stability and instability modes
available to each. First, we show typical phase space
trajectories in arc length, energy, angular
momentum coordinates for both systems in Figure 4 (centers of
mass in front of the contact point
and slot) and Figure 5 (centers of mass behind the contact point
and slot). In both cases, the skates
start with positive initial velocity V0 > 0. In Figure 5,
both skates reverse direction as their angular
momenta pass through maxima.
4.1. Stability Eigenvalues
To compare the stability of the smooth and discrete systems, we
expand the natural log of the
discrete stability eigenvalue (�4) in a Taylor series, divide
the result by the characteristic time ��
between collisions in steady motion, and take the limit � ! 0
(in nondimensional terms, �� = �V �
).
We obtain:
�4 =V �
�log
1 + L0(L0 +�)
1 + (L0 +�)2
!= V �
24� L0
1 + L20+ 1
2
L20 � 2�1 + L20
�2�� 13 L0�L20 � 2
��1 + L20
�3 �2 +O(�3)35 :(4.1)
As �! 0, �4 ! � L0V�
1 + L20, in agreement with �4 as calculated for the smooth skate
in Section 2.1. This
con�rms the �nding of Ruina [17] that the discrete skate
inherits the asymptotic stability eigenvalues
of the smooth skate even as dissipation goes to zero.
4.2. Stability and Instability Modes
While only one stability and one instability mode are available
to the smooth skate, two stability
and two instability modes are possible for the discrete skate.
The discrete skate has a stability and
instability mode like those of the smooth skate plus an
additional stable and unstable mode. We show
numerically generated plots of each mode in Figures 6{9. They
may be summarized as follows:
� Stability:
1. For L > 0 in the smooth skate (center of mass in front of
the skate contact) and forL0�
> �12in the discrete skate (center of mass in front of the
center of the slot), a small
angular velocity disturbance decays exponentially to zero and
each system heads smoothly
o� in a slightly di�erent heading (on the order of the
disturbance) at a speed higher by a
tiny amount (several orders of magnitude smaller than the
disturbance.) See Figure 6.
2. For �1 < L0�
< �12and
�1�
�2> �1
2
�1 + 2
L0�
��1 +
L0�
�> 0 in the discrete skate
(mass center between the center and tail end of the slot), the
system \wobbles" with
exponentially decaying oscillations as it approaches a slightly
di�erent heading and slightly
lower speed. This motion is not available to the smooth skate.
See Figure 7.
REGULAR AND CHAOTIC DYNAMICS V. 4, é 2, 1999 11
-
� M. J. COLEMAN, P.HOLMES
�����������������������������������
Fig. 4. For the smooth skate, the center of mass is in front of
the skate contact point (L = 1) and for the
discrete skate, in front of the slot (L0 = 1). The slot length
is � =13. The plot shows very similar trajectories
for the smooth and discrete skates even for a relatively large
ratio of slot length to center of mass position.
Energy is normalized with respect to the \�nal" energy, Ef (see
Appendix B), so that all smooth skates start
and end with unit energy and all discrete skates end with unit
energy. Since energy is conserved globally for the
smooth skate, its orbits lie on a constant energy plane. Both
the smooth and discrete skates are given the same
initial angular momentum and start with positive initial
velocity V0 > 0. The projections of the discrete skate
trajectory are shown in white on each coordinate plane. The
discrete skate trajectory is shown for 20 collisions.
The discontinuities in the graphs of angular rates are due to
the collisions. Note that angular momentum and
energy are conserved between collisions for the discrete
skate.
� Instability:
1. For L < 0 in the smooth skate (center of mass behind the
skate contact point) and forL0�
< �1 in the discrete skate (center of mass behind the tail
end of slot), a small positiveangular velocity disturbance at �rst
grows exponentially. But, as the heading approaches
near 90�, the smooth skate suddenly reverses direction (change
of sign in velocity along the
slot), continues to rotate (asymptotically approaching a �nal
heading near 180� while the
velocity along the slot asymptotically approaches near to the
negative of its initial value and
angular speed decays exponentially to zero. Like an unstable
caster wheel, the smooth skate
follows a cusp-like path on the plane, eventually reversing
velocity and heading backwards
close to its initial direction. See Figure 8.
For the discrete skate, again, a small positive angular velocity
disturbance at �rst grows
exponentially. However, it suddenly reverses direction along the
slot in its motion but at
some positive angle that depends on �. The closer the slot
length is to zero, the more the
discrete skate behaves like the smooth skate.
The �nal steady motions for the smooth or discrete skate, though
not near the initial states,
are again stable straight line motions.
12 REGULAR AND CHAOTIC DYNAMICS V. 4, é 2, 1999
-
MOTIONS AND STABILITY OF A PIECEWISE HOLONOMIC SYSTEM �
�����������������������������������
Fig. 5. For the smooth skate, the center of mass is behind the
skate contact point (L = �1) and for the discrete
skate, behind its slot (L0 = �1). The slot length is � =13.
Again the plot shows similar trajectories for the
smooth and discrete skates, even for a relatively large ratio of
slot length to position of center of mass. Both the
smooth and discrete skates are given the same initial angular
momentum and start with positive initial velocity
V0 > 0. The projections of the discrete skate trajectory are
shown on each coordinate plane. The discrete skate
trajectory is shown for 22 collisions.
2. For �1 < L0�
< �12and
�1�
�2< �1
2
�1 + 2
L0�
��1 +
L0�
�(center of mass between
the center and tail end of the slot), the skate at �rst wobbles
with exponentially growing
oscillations about its initial direction, suddenly reverses
direction at some positive or neg-
ative angle, and then asymptotically wobbles to some �nal
positive or negative angle. The
transitional and �nal angles are highly sensitive to the
parameters. In addition, the skate
speeds and slows between each collision: a \lurching" type of
motion. See Figure 9. This
type of behavior is not available to the smooth skate.
Finally, Figure 10 illustrates the neutrally stable period-2
motions obtained for � = I = 0, as
noted at the end of Section 3.1.2.
5. Conclusions
In this paper, we have extended the analysis of the discrete
Chaplygin sleigh or skate presented in
Ruina [17]. We have developed explicit Poincar�e mappings
describing motions of the system in terms
of energy and angular momentum, and used these to calculate the
discrete skate's linear stability
eigenvalue and hence provide explicit stability boundaries in
parameter space. We show that the
stability eigenvalue approaches that of the smooth skate in the
limit as the slot length goes to zero.
Furthermore, the discrete skate has somewhat broader stability
ranges than its smooth sister, in terms
of mass center position, and it exhibits a greater variety of
behaviors, including growing and decaying
REGULAR AND CHAOTIC DYNAMICS V. 4, é 2, 1999 13
-
� M. J. COLEMAN, P.HOLMES
����������������������������� !"#$%&'()
Fig. 6. For the smooth skate, the center of mass is in front of
the skate contact point (L = 1) and for the
discrete skate, in front of its slot (L0 = 1). The slot length
is � =13. In this and subsequent �gures, the solid
lines are for the discrete skate and the dashed lines are for
the smooth skate; also, H=C is the angular momentum
about the smooth skate contact point and H=P is the angular
momentum about a peg for the discrete skate.
The plots show similar stable trajectories for the smooth and
discrete skates. In this and subsequent �gures, (a)
shows the paths of the smooth skate contact point and the front
of the discrete skate slot. The discrete skate
plots are shown for 20 collisions. The discontinuities in the
plots for the discrete skate are due to the collisions.
Note that in (e) and (f) of this and subsequent �gures, energy
and angular momentum are conserved between
collisions.
oscillations in angular momentum and velocity, orbits with
multiple reversals, and coexistence of stable
straight-line motions in both forward and reverse
directions.
Acknowledgments
The authors thank Andy Ruina for suggesting Figures 4 and 5;
pointing out the velocity scaling
and the analogy of the skate to the forced, damped pendulum and
the 2D rimless wheel; showing how
to compare the eigenvalues of the discrete and smooth skates;
and his editing of this paper. PH was
partially supported by DoE: DE{FG02{95ER25238 and DARPA/ONR:
N00014{98{1{0747.
14 REGULAR AND CHAOTIC DYNAMICS V. 4, é 2, 1999
-
MOTIONS AND STABILITY OF A PIECEWISE HOLONOMIC SYSTEM �
����������������������������� !"#$%&'()
Fig. 7. The center of mass is between the rear end and center of
the slot
�L0�
= �23
�and
�1�
�2=
��
�
�2=
0:08. The plots show stable behavior for the discrete skate not
available to the smooth skate { the system
\wobbles" with exponentially decaying oscillations as it
approaches a slightly di�erent heading and slightly
lower speed. In Figure (a) and subsequent �gures, the peg
locations are marked with plus (\+") signs. The
plots are shown for 15 collisions.
A. Smooth Skate Closed Form Solutions
To �nd closed form solutions for state variables as a function
of arc length S, we must take into
account that, when the skate goes unstable for L < 0, the
velocity of point C changes sign at a
particular point along the skate path. Sc is the arc length at
the change in sign of velocity for L < 0:
Sc = S0 � 1 + L2
2Lln
1 +
V 20
20(1 + L2)
!: (A.1)
So, for S > Sc, V < 0. The closed form solutions may now
be written:
V (S) = K
vuutV 20 +20 (1 + L2)) 1� e
�K2L
1+L2(S�S0)
!;
�(S) = �0 +K
p1 + L2
L
264sin�1
0B@ 1q
V 20
20(1+L
2)+ 1
1CA� sin�1
0B@e�K
L
1+L2(S�S0)q
V20
20(1+L2)
+ 1
1CA375 ; and
(S) = 0 e�K
L
1+L2(S�S0)
;
(A.2)
REGULAR AND CHAOTIC DYNAMICS V. 4, é 2, 1999 15
-
� M. J. COLEMAN, P.HOLMES
����������������������������� !"#$%&'()
Fig. 8. For the smooth skate, the center of mass is behind the
skate contact point (L = �p2) and for the
discrete skate, behind the tail end of its slot (L0 = �p2). The
slot length is � =
p22. The plots show similar
initially unstable orbits for the smooth and discrete skates.
The discrete skate plots are shown for 18 collisions.
where for V0 > 0, K is de�ned as
K =
�1 S > S0 and L > 0 or S < Sc and L < 0 ;
�1 S > Sc and L < 0 : : (A.3)
Energy{Momentum Formulation
Recasting the problem in terms of energy and momentum as
functions of arc length S, the state
of the system can be characterized by the nondimensional
quantities:
E(S) = 12
�V 2(S) + (1 + L2)2(S)
�= E0 = const ;
�(S) = �0 +K
p1 + L2
L
2666664sin
�1
0@ 1q
2E0(1 + L
2)
(H0=C)2
1A� sin�1
0BBBBB@e�K
L
1+L2(S�S0)s
2E0(1 + L
2)
(H0=C)2
1CCCCCA
3777775 ; and
H=C(S) = (1 + L2)(S) = H0=C e
�KL
1+L2(S�S0)
:
(A.4)
16 REGULAR AND CHAOTIC DYNAMICS V. 4, é 2, 1999
-
MOTIONS AND STABILITY OF A PIECEWISE HOLONOMIC SYSTEM �
����������������������������� !"#$%&'()
Fig. 9. The center of mass is between the rear end and center of
the slot
�L0�
= �0:55
�and
�1�
�2=
��
�
�2=
0:001. The plots show unstable behavior for the discrete skate
not available to the smooth skate | the system
\wobbles" with exponentially increasing oscillations until it
reverses direction, eventually approaching some
�nal angle and a speed along the slot nearly equal to its
initial value. The plots are shown for 25 collisions.
The state vector is now q = fS;E; �;H=CgT . Equilibrium
straight-line solutions are
H�=C = 0 and E� = 1
2(V �)2; (A.5)
where the energy is all in translation. In terms of energy and
momentum, the change in sign of the
velocity of the contact point occurs at:
Sc = S0 � 1 + L2
2Lln
2E0(1 + L
2)
(H0=C)2
!: (A.6)
B. Discrete Skate Formulation
We summarize here solution of the governing equations of motion,
derivation of the return map
and calculation of �xed points and their stability.
REGULAR AND CHAOTIC DYNAMICS V. 4, é 2, 1999 17
-
� M. J. COLEMAN, P.HOLMES
����������������������������� !"#$%&'()
Fig. 10. A point mass is located between the rear end and center
of the slot
�L0�
= �23
�and the moment of
inertia of the skate is zero (� = 0). The plots show period-2
behavior for the discrete skate not available to the
smooth skate. Note in (a) that the center of mass travels along
a straight line; its position is shown just after
each collision. Note in (e) that no energy is lost at
collisions.
B.1. Solution of Equations of Motion between Collisions
Closed form solutions of (3.1) for V and can be found as
functions of D (the position of the
peg along the slot) between collisions:
[V (D)]2 = V 20 +(D �D0)(2L0 +D +D0)(1 + (L0 +D0)2)
1 + (L0 +D)2
20 and
(D) = 01 + (L0 +D0)
2
1 + (L0 +D)2;
(B.1)
the latter is just conservation of angular momentum about the
peg. Using this, conservation of energy,
and observing from the governing equations (3.1) that d�dD
=
V, the angle � between collisions can be
expressed as an elliptic integral
�(D) = �0 +
DZD0
dD0vuut 1 + (L0 +D0)21 + (L0 +D0)
2
"�V0
0
�21 + (L0 +D
0)2
1 + (L0 +D0)2+ (D0 �D0)(2L0 +D0 +D0)
# ; (B.2)
where the prime (0) indicates a dummy integration variable.
18 REGULAR AND CHAOTIC DYNAMICS V. 4, é 2, 1999
-
MOTIONS AND STABILITY OF A PIECEWISE HOLONOMIC SYSTEM �
B.2. Return map
The return map is derived by composition of the collision rule
(3.7) in terms of energy and
angular momentum, with the solutions (B.1-B.2) of the governing
equations between collisions, and
using conservation of energy and angular momentum about the peg
between collisions. There are two
cases: (1) the sign of velocity along the slot just after a
collision is the same as its sign just before
the next collisions and (2) the velocity along the slot changes
sign in between collisions.
1. sgn[(i+1V �)(iV +)] = 1
i+1D+ =i D+ ;
i+1E+ = iE+ + iC+1
�iH+
=P
�2;
i+1�+ = i�+ ;
+
�� iD+ZiD+
dD0vuut(1 + (L0 +D0)2)"2iE+
�1 + (L0 +D
0)2�
(iH+=P )2
� 1# � i�+ + f3(iE+;iH+=P ) ;
i+1H+=P
= iC+2iH+
=P;
iC+1 = �12�2�
1 + (L0 + (�� iD+))2�2[1 + (L0 +
iD+)2]; and
iC+2 =1 + L0(L0 +�)
1 + (L0 + (�� iD+))2:
(B.3)
2. sgn[(i+1V �)(iV +)] = �1i+1D+ = �� iD+ ;i+1E+ = iE+ +
iC+1
�iH+
=P
�2;
i+1�+ = i�+ + 2
DcZiD+
dD0vuut(1 + (L0 +D0)2)"2iE+
�1 + (L0 +D
0)2�
(iH+=P )2
� 1# ;
i+1H+=P
= iC+2iH+
=P;
iC+1 = �12�2�
1 + (L0 +iD+)2
�2[1 + (L0 + (�� iD+))2]
; and
iC+2 =1 + L0(L0 +�)
1 + (L0 +iD+)2
:
(B.4)
Here iD+ = 0 for iV + > 0 and iD+ = � for iV + < 0. Note
the changes in iC+1 andiC+2 between
cases (1){(2).
REGULAR AND CHAOTIC DYNAMICS V. 4, é 2, 1999 19
-
� M. J. COLEMAN, P.HOLMES
B.2.1. Velocity Reversals
The point(s)Dc along the slot where V (Dc) = 0 and the skate
reverses direction between collisions
may be found from the conservation laws (3.3{3.4) as the
relevant solution(s) Dc 2 (0;�) of:
Dc = �L0 �
vuuut24(iH+=P )2
2 iE+� 135: (B.5)
Clearly, for L0 > 0 (resp. L0 < ��), only the positive
(resp. negative) solutions are relevant, but bothsolutions may lie
within the slot for �� < L0 < 0. However, relevant solutions
occur only when the
\energy/angular momentum" ratio
2 iE+
(iH+=P )2
!falls into an appropriate range. Given the ratio at step
i, one can compute the number of additional iterates necessary
for this to occur from the conservation
laws and the mapping rule (B.3), by seeking a sign change in the
quantity V (D), thus obtaining:
n =
66666666664
log
241 + (1� (iC+2 )2)
iC+3
2 iE+
(iH+=P)2
�1 + (L0 +
iD+)2�� 1!35
log�(iC+2 )
2�
77777777775; (B.6)
where
iC+3 =sgn[iV +]�(2L0 +�)
1 + (L0 + (�� iD+))2: (B.7)
(The \bxc" notation has the usual meaning of the greatest
integer less than or equal to a number x.)Note that Equation (B.6)
applies only in cases in which there is at most a single turning
point
Dc 2 (0;�): i. e., to all L0 > 0 and L0 < ��, but only to
some subcases of �� < L0 < 0.Speci�cally, if
min
(1
1 + L20;
1
1 + (L0 +�)2
)<
2 iE+
(iH+=P)2
< 1 ; (B.8)
then (B.5) has two relevant solutions, reversals can occur for
both iV + > 0 and iV + < 0, and (B.6)
does not predict n. One can compute the number of steps needed
to achieve (B.8) from given initial
data, but we have not been able to �nd a \simple" expression
analogous to (B.6).
B.2.2. Energy Analysis
Let iE+ be the energy of the skate after which no more reversals
can occur. Then, its total energy
n collisions after the i'th is given by the geometric
series:
i+nE+ = iE+ + iC+1 (iH+
=P)2
nXj=0
(iC+2 )2j
= iE+ + iC+11� (iC+2 )2n1� (iC+2 )2
(iH+=P)2 (summing the series for �nite n):
(B.9)
20 REGULAR AND CHAOTIC DYNAMICS V. 4, é 2, 1999
-
MOTIONS AND STABILITY OF A PIECEWISE HOLONOMIC SYSTEM �
We �nd the �nal energy in terms of that after the ith collision
as n!1 to be:
Ef =iE+ + lim
n!1
iC+11� (iC+2 )2n1� (iC+2 )2
(iH+=P)2
= iE+ +iC+1
1� (iC+2 )2(iH+
=P)2 ;
(B.10)
where convergence requires that jiC+2 j < 1 or
� L0�
+ 2L0�
�1�
iD+
�
�+
�1�
iD+
�
�2> 0 and
�1�
�2>� L0
�
�L0�
+ 12+
�1�
iD+
�
��� 1
2
�1�
iD+
�
�2> 0 :
(B.11)
These conditions are exactly those for asymptotic stability of
period-1 �xed points (Equation(3.11)).
We use Equation (B.10) to generate Figures 4{5.
We can rewrite Equation (B.10) in terms of initial and �nal
velocities and angular rate to get, for
Vf > 0:
V 2f = (iV +)2 + (1 + L20)
"1� �
(L0 +�) (2 + (L0 +�)(2L0 +�))
#(i+)2 : (B.12)
A similar expression can be obtained for Vf < 0.
Interestingly, for the special \symmetric" case of mass center
located at the center of the slot
(L0�
= �12), Equation (B.12) shows that the velocity along the slot
after many collisions returns
to its initial value, Vf = V0 (the skate has no sense of whether
it is going forwards or backwards).
Also, for this case the sequence of energy/momentum ratios
leading to the unstable spin state can
easily be found via a return map for energy/angular momentum
ratio, derived from (B.3{B.4), cf.
Equation (B.9). From this we �nd a monotone decreasing sequence
of energy/momentum ratios for
which the nth element of the sequence arrives at the state
necessary to approach the spinning solution
(following n collisions). This sequence may be rewritten in
terms of velocity along the slot and angular
rate as
(nV +)2
(n+)2= (1 + L20)
2
C2n2 � 2C1
1� C2n21� C22
!� (1 + L20); n = 0; 1; 2; 3; : : : (B.13)
(we may drop the pre- and post-superscripts from C1 and C2 since
for the symmetric caseL0�
= �12
their values coincide for V > 0 and V < 0). Using the fact
(above) that V � = � iV +, Equation (B.13)leads to the plot of
basins of attraction for V � > 0 and V � < 0 shown in Figure
3.
B.3. Fixed Points
The return map (Equation(B.3)) shows that periodic motions with
lossless collisions require that
iC+1 (H�
=P )2 = 0 : (B.14)
This condition is satis�ed if: (1) H�=P
= 0 or (2) iC+1 = 0.
REGULAR AND CHAOTIC DYNAMICS V. 4, é 2, 1999 21
-
� M. J. COLEMAN, P.HOLMES
1. For H�=P = 0, we get period-1 motions: constant-speed
straight-line solutions (E� = 1
2(V �)2 =
E0 � constant) where, as for the smooth skate, the energy is all
in translation. The intercollision duration is �� = �
V �= �p
2E�. For �xed system parameters (L0, �) there is a two-
dimensional family of period-1 motions parameterized by speed V
� and heading ��.
2. For iC+1 = 0, either (a) � = 0 (slot length is zero) or (b) �
! 0 (radius of gyration goes tozero). Case (a) is the smooth skate.
In case (b), the skate becomes a massless structure with a
point mass located along its fore-aft axis of symmetry.
Special Limiting Case (lim� ! 0): For � = 0, taking angular
momentum balance aboutthe mass center shows that no net moment can
act on the skate structure. Since the constraint
force (F ên) is the only force acting on the skate, a vanishing
applied moment requires that F = 0.
Then, linear momentum balance implies that the acceleration of
the center of mass is zero; hence, the
mass center must travel in a straight line at constant velocity
in the direction of the initial velocity
vector throughout the skate's motion, which is therefore
completely determined by geometry.
For ease of analysis, we �rst �nd the simpli�ed return map for
angular momentum with zero
moment of inertia:
i+1H+=P
= iC+2iH+
=P; (B.15)
where now
iC+2 =L0(L0 + 1)
(L0 + (1� iD+))2; (B.16)
and, since � = 0, we have nondimensionalized with respect to the
slot length �:
L0 =`0�; D = d
�; V = vv0
; = !v0� ; � =
tv0�
; and (_) =d( )
d�; (B.17)
so the nondimensional slot length is � = ��= 1. We can get
period-1 solutions for iC+2 = 1, which
holds only for the trivial case � = 0. Thus, the only period-1
solutions in this case are again the
constant-speed straight-line motions or H�=P
= 0.
When � = 0 and given arbitrary initial conditions, the velocity
along the slot will change sign once
after each collision for L0 < 0; i. e., according to Equation
(B.6), n = 0. That the skate center-of-mass
must travel in a straight line in the direction of the initial
velocity vector corroborates this fact; if
the center-of-mass is behind the slot and must travel in a
straight line, the skate will \ip" around
the current peg and reverse direction with respect to it. This
periodic ip-op in the sign of velocity
along the slot raises the question of whether period-2 solutions
exist.
Over two collisions, we havei+2H+
=P= i+1C+2
iC+2iH+
=P. Period-2 solutions require i+1C+2
iC+2 = 1 and the ip-op in velocity
along the slot after each collision (L0 < 0,L0�
6= �1). (For L0�
= �1 and given arbitrary initialconditions, the skate stops
translating after one collision and spins in�nitely fast about a
peg.) For
� = 0, using (B.16) with iD+ = 0, i+1D+ = � = 1 (or vice versa),
we �nd
iC+2 =L0
L0 + 1=�i+1C+2
��1; thus neutrally stable period-2 solutions exist, as shown in
Figure 10.
No other periodic solutions exist. For � small but nonzero,
however, numerical studies show that
quasi-periodic motions exist closely resembling those in Figure
10; after many collisions and looping
motions, the skate eventually settles into a straight-line
motion.
22 REGULAR AND CHAOTIC DYNAMICS V. 4, é 2, 1999
-
MOTIONS AND STABILITY OF A PIECEWISE HOLONOMIC SYSTEM �
References
[1] A.A.Andronov, A.A.Vitt, S. E.Khaikin. Theory of
Oscillators. Dover, 1966.
[2] A.M.Bloch. Asymptotic Hamiltonian dynamics: the
Toda lattice, the three-wave interaction and the non-
holonomic Caplygin sleigh. Preprint, Dept of Mathe-
matics, University of Michigan, 1999. unpublished.
[3] M.Buhler, D.E.Koditschek. From Stable to Chaotic
Juggling: Theory, Simulation, and Experiments. 1990
IEEE International Conference on Robotics and Au-
tomation, IEEE Robotics and Automation Society,
1990, P. 1976{1981. The Proc. are from a conference
held during May 13-18, 1990 in Cincinnati, Ohio.
[4] M.Coleman, A.Chatterjee, A.Ruina. Motions of a
Rimless Spoked Wheel: A Simple 3D System with Im-
pacts. Dynamics and Stability of Systems, 1997, V. 12,
é. 3, P. 139{169.
[5] M.J.Coleman. A Stability Study of a Three-
dimensional Passive-dynamic Model of Human Gait.
Cornell University, 1998, Ithaca, NY.
[6] M.J.Coleman, A. Ruina. An uncontrolled walking toy
that cannot stand still. Phys. Rev. Let., 1998, V. 80,
é 16, P. 3658{3661.
[7] M.Garcia, A.Chatterjee, A.Ruina, M. J. Coleman.
The Simplest Walking Model: Stability, Complexity,
and Scaling. ASME J. Biomech. Eng., 1998, V. 120,
é 2, P. 281{288.
[8] J.Guckenheimer, P.Holmes. Nonlinear Oscillations,
Dynamical Systems, and Bifurcations of Vector Fields.
Springer{Verlag, 1983, New York.
[9] Y. Hurmuzlu. Dynamics of Bipedal Gait: Part I |
Objective functions and the contact event of planar
�ve-link biped. J. of Applied Mechanics, 1993, V. 60,
P. 331{337.
[10] Y. Hurmuzlu. Dynamics of Bipedal Gait: Part II |
Stability analysis of a planar �ve-link biped. J. of Ap-
plied Mechanics, 1993, V. 60, P. 337{343.
[11] T.McGeer. Passive Dynamic Walking. Intern. J. Ro-
bot. Res., 1990, V. 9, é 2, P. 62{82.
[12] T. McGeer. Passive Walking with Knees. Proc., 1990
IEEE International Conference on Robotics and Au-
tomation, 1990, P. 1640{1645, IEEE, Los Alamitos,
CA.
[13] T.McGeer. Passive Dynamic Biped Catalogue. Proc.,
Experimental Robotics II: The 2nd International Sym-
posium. 1992, P. 465{490, Springer{Verlag, Berlin.
[14] J. I.Neimark, N.A. Fufaev. Dynamics of Nonholo-
nomic Systems. AMS, 1972, V. 33, Translations of
Mathematical Monographs, Providence, Rhode Island.
[15] R.Pratap, S.Mukherjee, F.C.Moon. Dynamic Behav-
ior of a Bilinear Hysteretic Elasto-plastic Oscillator,
Part I: Free Oscillations. J. of Sound and Vibration,
1994, V. 172, é 3, P. 321{337.
[16] R.Pratap, S.Mukherjee, F.C.Moon. Dynamic Behav-
ior of a Bilinear Hysteretic Elasto-plastic Oscillator,
Part II: Oscillations Under Periodic Impulse Forcing.
J. of Sound and Vibration, 1994, V. 172, é 3, P. 339{
358.
[17] A.Ruina. Nonholonomic Stability Aspects of Piece-
wise Holonomic Systems. Reports on Mathematical
Physics, 1998, V. 42, é 1/2, P. 91{100.
[18] A.Ruina. Personal communication. 1999. unpub-
lished.
[19] J. Schmitt, P.Holmes. Mechanical Models for insect
Locomotion: Dynamics and stability in the horizontal
Plane. 1999. Preprint, Department of Mechanical and
Aerospace Engineering. Princeton University.
[20] S.W.Shaw, P. J.Holmes. A periodically Forced Piece-
wise Linear Oscillator. J. of Sound and Vibration,
1983, V. 90, é 1, P. 129{155.
[21] S.W.Shaw, R.H.Rand. The Transition to Chaos in
a Simple Mechanical System. International Journal of
Non-Linear Mechanics, 1989, V. 24, é 1, P. 41{56.
REGULAR AND CHAOTIC DYNAMICS V. 4, é 2, 1999 23