Embed Size (px)
DESCRIPTION
Control
Citation preview

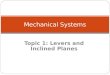
MA3005: Control TheoryTopic 3: Mathematical Modeling
of Mechanical Systems
Tegoeh Tjahjowidodo
+-
Controller Plant++
D(s)
U(s) Y(s)
1
Constituents of Mechanical Systems
• Inertia elements
– Mass (kg) or Moment of Inertia (kg-m2)
• Spring elements
– Deformed by an external force (torque) where the deformation (angular disp.) is directly proportional to the force (torque) applied to it
• Damper elements
– Force (torque) acting on the damper is proportional to the velocity (angular velocity) difference of both ends
2

Translational Spring
F = kx = k(x1 – x2)
where k is called spring constant
3
F = kx = k(x1 – x2)
where k is called spring constant
Translational Spring
4

Rotational Spring
T = kq = k(q1 – q2)
where k is called torsional spring constant
q
1
q
2
kT T
5
Translational Damper
where b is the viscous friction coefficient
b
6
)( 21 xxbxbF

Rotational Damper
b is the torsional viscous friction coefficient
b
7
)( 21 bbT
Modeling of Mechanical Systems
• Obtain Equation of Motion using Newton’s second law
• For translational motion
F = ma
• For rotational motion
T = Jα
where, F is sum of all external forces acting in a given direction on mass, m and a is absolute acceleration in that direction
where, T is sum of all torques acting about a given axis, J is moment of inertia about that axis, α is absolute acceleration in that direction
8

Spring-mass-damper system
• Used to model flexible structures, suspension systems
• For input force (f), the output is the response (displacement, x) of the mass
• How does the output change for different force inputs?
bk
mxf(t)
9
Assumptions for this model
• Mass, spring, and damper constants are fixed and known
• Springs satisfy Hooke’s law
• Damper is (linear) viscous force, proportional to velocity
10

Free Body Diagram
• Applying Newton’s 2nd law, the eqn. of motion is
• Free Vibration Response:
If f(t) = 0 and response of
spring-mass-damper system is
only due to initial conditions
f(t) x
kx bx•
( )F f t kx bx mx
mx bx kx f t
Note: x is measured from the equilibrium location
11
TF of Mass-Spring-Damper System
Taking Laplace Transform of both sides and assuming zero initial conditions
or,
[m s2 + b s + k] X(s) = F(s)
mx bx kx f t
)]0()0()([
)]0()([)()(2 xsxsXsm
xssXbskXsF
12

The transfer function is
where X(s) is the displacement (output) and F(s)the external force (input)
kbsmssFsX
2
1)()(
13
TF for Rotational System
Eqn. of Motion
Taking LT and zero i.c.
2
( ) 1
( )a
s
s Js Bs K
aKBJ
Note: Torque a is the input Angular displacement is the output
14

Example 1: B-3-14 (pp. 148)
Determine the eqns. of motion and TF for the system
15
y
Define the displacement of a point of spring k1
y
k1
k1y
16
Assuming y is moving to the right side (assumption#1):
The spring is stretched and essentially it pull all parts in its right to the left side.

k2(x-y) u(t)m
y x
k2
k2(x-y)k1y2 1( )k x y k y
17
)()( 2 yxktuxm
Define the displacement of x and y:
Assuming x moves to right and x > y (assumption#2):
Consider the mass m:
• from the 1st equation:
• The equation of motion:
xkk
ky
xkykyk
21
2
221
uxkk
kkxm
21
21
18

k2
k1y
y xk2(y-x)
19
How if we take different assumption?
For assumption#2, let’s now take and x < y
xkxyk 12 )( xkyxk 12 )(
resulting in the same equation
Assuming x moves to right and x > y (assumption#2):y x
k2
k2(x-y)k1y2 1( )k x y k y
System Transfer Function
The equation of motion is
20
uxkk
kkxm
21
21
Taking Laplace transform of the equation:
uxkk
kkxm LLL
21
21
)()()0()0()(21
212 sUsXkk
kkxxssXsm
For given initial conditions 0)0()0( xx
)()()(21
212 sUsXkk
kksXms

System Transfer Function
The transfer function is
21
212
1)()(
kkkk
mssUsX
21
What is equivalent spring constant for two springs attached in series?
What is equivalent spring constant for two springs attached in parallel?
Example 2:
• Derive equations of motion for two degrees of freedom(2-DOF) system
22

Free body diagram (FBD)
Consider for the spring k0, k1, and k2; inertia J1 and J2
23
T1
11 2
2
T2T0 T0T1
T0 T0 T2
k1k0 k2
T1 = k11
24
1
T1
k1
Define the displacement of a point of spring k1
Assuming 1 is moving clockwise:
The spring is stretched in clockwise direction

T0 = k0(2 – )
25
2k0
Define the displacement of a point of spring k0
Assuming 2 is moving clockwise and 2 > 1 :
1
T0 T0
The spring is also stretched in clockwise direction
T2 = k22
26
2
T2
k2
Define the displacement of a point of spring k2
1 has been assumed moving clockwise:
The spring is stretched in clockwise direction

27
Define the equation of motion on J1
Applying Newton’s 2nd law:
The total torque is equivalent to the inertial torque
1
T1T0
1101 JTT
11J
0)( 2101111 kkJ
cw = positive
28
Define the equation of motion on J1
Applying Newton’s 2nd law:
The total torque is equivalent to the inertial torque 22J
22
T0 T2
2220 JTT
0)( 1202222 kkJ

Eqns. of motion (2 D.O.F. system)
Hence, the Equations of Motion are
29
What is the input to this system?Is it possible to find transfer function for this system?
0)( 2101111 kkJ
0)( 1202222 kkJ
Initial Condition Response
• Taking Laplace transform of Eqn. (1) and (2)
For given initial conditions θ1 (0) = θ10; θ2 (0) = θ20 ;
Eqn 3 and 4 can be solved to get initial condition response Θ1(s) and Θ2(s)
30
1 10 2 200 ; 0
21 1 1 1 1 1 0 1 2
2 22 2 2 2 2 2 0 2 1
0 0 0 (3)
0 0 0 (4)
J s s s k s k s s
J s s s s k s k s s

General Guidelines to Model Mass-Spring-Damper Systems
1) Define a (+)ve direction
2) Define displacements from rest or equilibrium position for each inertia element in the (+)ve direction
3) Assume relative displacement across every spring and damper elements to visualise if they are in compression/ elongation
4) Determine all the forces in the spring and damper elements according to step 3. Forces on inertial element will have opposite directions
5) For each inertia element, use Newton’s 2nd Law to determine resultant force producing accel. in (+)ve direction
6) Laplace transform makes the ODE into algebraic equation for ease of manipulation of the position variable 31
Reading Assignment
32
• Modern Control Engineering, 5th Ed.
Ch. 3: Sec. 3.2

Other Mechanical systems
• Many systems have multiple components
• Power can be transmitted through pulleys, gears, levers, etc
• Can be interconnected with electrical systems such as in motors.
Now, we explore few examples of such multi-body systems or and later understand systems that involve modeling of both
mechanical as well as electrical systems
33
Gear Trains
If radii of gear 1 and gear 2 are r1 and r2
Numbers of teeth on gear 1 and gear 2 are n1 and n2
Then,
2
1
2
1
nn
rr
34

The surface speeds at the point of contact of the two gears must be identical
r1 1 = r2 2
Therefore,
2
1
2
1
1
2
nn
rr
35
• If frictional losses are neglected,
• No power loss, the torque applied to the input shaft (T1) is related to the torque transmitted to the output shaft (T2) by
T1 1 = T2 2
36

Example 1. Gear Trains
Viscous rotational damping coeff., b1
Viscous rotational damping coeff., b2
37
• Load is driven by motor through gear train
• Shafts of the gear train are stiff
• No backlash or elastic deformation
• Number of teeth on each gear to radius of the gear
• Subscript 1 refers to motor shaft, gear 1 etc.
• Subscript 2 refers to load shaft, gear 2
38

Eqn. of Motion for Motor Shaft
Newton’s 2nd law:
where, • Tm is the torque developed by
the motor • T1 is the load torque on gear 1
due to the rest of the gear train
• J1 is the moment of inertia for the gear 1 along with its shaft
39
Tm
T1
b1
mTTbJ 11111 (1)
Eqn. of Motion of Load Shaft
where,
• T2 is the torque transmitted to gear 2
• TL is the load torque
• J1 is the moment of inertia for the gear 1 along with its shaft
2 11 2 2
1 2
3n
T T Tn
Since the transmitted power remains unchanged
Note: If n1/n2 < 1, then, 2/1 < 1 40
T2
2
TLb2
22222 TTbJ L (2)

The gear ratio reduces the speed, and increases the torque T2, elimination of T1 and T2 yields
This equation can be written in terms of 1 or 2
41
mL TTbJn
nbJ )( 2222
2
11111
Eqn. of motion in terms of 1
Since 2 = (n1/n2)1
Defining equivalent inertia and viscous damping coefficient (for shaft 1) for the gear train as
42
2 2
1 11 1 2 1 1 2
2 2
, eq eq
n nJ J J B b b
n n
mL TTn
nb
n
nbJ
n
nJ
2
112
2
2
1112
2
2
11

• Equation of Motion can be simplified as
where N = n1/n2
• Note: If n1/n2 << 1, the effect of J2 (b2) on the equivalent inertia J1eq (friction B1eq) is negligible
Tm
ω1
J1eqb1eq
NTL
Eqn. of Motion in terms of 1(Simplified)
43
Equivalent system for the gear train
mLeqeq TNTBJ 1111 (4)
TF of the gear coupling
44
In (4)
Assuming that the load torque TL is zero Taking the Laplace transform Dropping all subscripts – all quantities referred to
input
1 1 mJs B T s
1 1
m
s
T s Js B
BJs 1
n1/n2
Tm Motor Speed
2
Load Speed

Eqn. of motion in terms of 2
• Since 1 = (n2/n1)2
45
mL TTbJn
nbJ 2222
2
11111
mL Tn
nTbb
n
nJJ
n
n
1
2221
2
1
2221
2
1
2
• Equivalent inertia and viscous friction coeff. with reference to shaft 2 are
• Equation of Motion can be simplified as
46
2 2
2 22eq 2 1 2eq 2 1
1 1
, n n
J J J B b bn n
where n = n1/n2
mLeqeq Tn
TBJ1
2222

Example 2. Rack and pinion gear
Used to convert rotational motion to translational motion
Torsionalspring constant
Input
Output
47
Governing Equations
J
K(-A)
a
1B
K(-A)
fc
M
fc
2B x
To develop an input-output transfer function the redundant variable fc,, A must be eliminated
48
aAKBJ )(1 (1)
)( Ac KRf (2)
cfxBxM 2 (3)

• In addition, the geometric relationship
must hold because of the contact between the rack and the pinion gear
• Taking LT of (1) with zero ICs and substituting for A
from (4)
4AR x
21
5a
KX s T s
RsJs B s K
49
• Taking LT of (2) and substituting for fc from (3)
• Eliminating A using (4) and using (5)
22 A
KMs X s B sX s s s
R
KsRBB
sRMKBBJK
sRMBJBJsMR
KRsΤsX
a
221
2221
3212
42)()(
50

• If shaft is assumed to be stiff, governing eqns are
• Resulting transfer function from input torque to output linear displacement x becomes
sRBBsMRJ
RsΤsX
a2
2122)(
)(
51
acRfBJ 1
xR
cfxBxM 2
Modeling of an automobile
52
Half-Car Model

A simplified model
53
Quarter Car
Model