Embed Size (px)
Citation preview

MAGLEV CRUDE OIL PIPELINE
Ernst G. Knoile
Knolle MagnetransSouth San Francisco, CA
SUMMARY
N94- 35919
)qq q c> lq IZ
:_ IY
This maglev crude oil pipeline consists of two conduits guiding an endless stream of long containers.One conduit cames loaded containers and the other empty returns. The containers are levitated by permanent
magnets in repulsion and propelled by stationarT linear induction motors. The containers are linked to eachother in a manner that allows them, while in continuous motion, to be folded into side by side position at
loading and unloading points. This folding causes a speed reduction in proportion to the ratio of containerdiameter to container length. While in side by side position, containers are opened at their ends to be filled or
emptied. Container size and speed are elected to prtx:luce a desired carrying capacity.
INTRODUCTION
The Difficulty of Conventional Crude Oil Pumping
Long distance land transl:x_rtation of crude oil, especially heavy crude, is ver T expensive with presenttechnology. Oil from the north slope of Alaska is a classic example. It needs to be transported manythousands of miles to the market. However, in the first 800 miles, from Prudh(_ Bay to Valdiz by a
conventional pumping methtxl, the Alaska pipeline consumes, including interest and capital recovery,
roughly one-third of the oil's value (ref. I). The major reasons for this excessive cost are:
a. The pipeline was designed with special concerns for the environment. For instance, remote controlvalves were installed at 5 mile intervals to limit spills to 64,000 bmrels for each single line break.
b. '-l'he line also had to withstand temperature extremes of minus 70 degrees Fahrenheit when empty of
oil in midwinter, and plus 145 degrees Fahrenheit when filled with oil at the maximum pumping rate of 2million barrels a day, without adversely affecting the sun'oundings.
c. Pumping capacity of about 500 horsepower per mile at pressures of up to 12(X) pounds per square-
inch was needed to push the oil along at barely 7 miles per hour.
d. To pump a large volume of 2 million barrels per day at this slow speed of 7 miles per hour required
a 48 inch diameter pipeline.
c. A 48 inch diameter pipeline under 1200 pounds per square-inch pressure needs 2 inch thick walls.
As a result of (a) to (e) above and more, environmental concerns, temperature extremes and large
diameter pipelines with thick walls under high pressure, all added up to high cost major construction.
671
https://ntrs.nasa.gov/search.jsp?R=19940031412 2018-05-10T18:46:00+00:00Z

How a Maglev Pipeline Would Improve Crude Oil Transportation
In assembly line fashion, the crude oil is put into containers at atmospheric pressure and sealed. Thecontainers are then magnetically suspended over a track and propelled to their destination with linearinduction motors. Freed of the drag caused by adhesion to the ifiside of a pipe and no matter if the oil is hotor cold, the oil can now be moved at much higher speed, for example, thirty times as fast as whenconventionally pumped. Since capacity equals speed times cross sectional area, a thirty fold speed increaseallows a thirty fold decrease in cross sectional area, which in turn means much less weight. Hence, thecontainers can be small and light, and they can easily be magnetically suspended with permanent magnets inrepulsion. A conduit provides guidance and containment. The containers fold up at the ends of the line andslow to a crawl, at which time they are filled or emptied.
BASIC COMI::_NENTS OF MAGLEV PIPELINE
Permanent Magnets in Repulsion as the Means of Suspension
The crude 0il is put into containers which are suspended by permanent magnets in repulsion as shownin Figure 1. Not shown are lateral guidance controls, which can be either mechanical or magnetic. Figure 7p.682 (refs. 2, 3 & 4) shows details of lateral guidance. A particular advantage of using permanent magnetsm repulsion is that they require no power to levitate and the containers always remain levitated even when
the system is turned off and has stopped. New magnetic compounds now virtually last forever in this type ofapplication.
Magnets attached to
containers and magnets
inside conduit repel
each other vertically.
Figure 1. Typical cross section of maglev pipeline.
Electric Linear-InduCtion MotOrs (LIM) for Propulsion
The primary portion of a typical electric linear induction motors (LIM) is shown in Figure 2. Thesecondary to this LIM consists of a metal sandwich attached to the bottoms of the containers (ref. 5). The
specd of the shown LIM can be varied by varying the frequency of the supplied power. For instance, thespeed can be reduced from 200 to 100 miles per hour (mph) by reducing the frequency from 150 to 75cycles per second (cps). The LIM can also be reversed for braking. A power supply with appropriatecontrols would be required to meet the full range of possible operating needs.
Q iEmpty return line
VI _ |
672
L
=

30 feet long, 26 poles three phase, 1000 V, 325 Amps
150 cps, 900 lbs thru_
..._. -
100 miles apart.
Figure 2. Typical high speed high performance linear induction motor (LIM).
Dynamic Mechanical Loading and Unloading
The containers are flexibly attached to each other end to end and move in unison. A short distancebefore the end of the line is a cam that forces alternate container joints to diverge onto upper and lowertracks. This causes the containers to fold up against each other and slow down, the last stages of which areshown in Figure 3 (ref. 6). After they have completely folded, they pass through either a filling or adumping station followed by a U-turn.
Nozzles enter containers
and move with them
Containers moving at steady 4 fps
3 G deceleration Upper track
Lower track
Figure 3. Typical folding and filling of containers.
Comments on Figure 3. Figure 3 is a cutout from a drawing that shows a 200 mph system. Whilethis might be a look into the future in bulk materials transportation, initial speeds of between 50 and100 mph would be adwx:ated with provisions to step the speed up to a higher level later.
673

Elevated across open country
Figure 4. Typical design of maglev crude oil pipeline.
MAGLEV PIPELINE COST AND CAPACITY
Construction Cost. A detailed cost estimate shows that, if a medium size maglev crude oil pipelinewere to be built in 1993 as an elevated system as shown in Figure 4, it would cost about $500,000 per mile.Not included in this estimate are the costs of (1) right-of-ways, (2) power generators if needed, (3) serviceroads and (4) end facilities. The elevated design is preferred because of the continued need for very straight
alignment similar to overhead wires or catenaries of high speed railroads.
Table 1. Assorted Carrying Capacities, Barrels per Day
Nominal container
diameter (inches)
Speed
25 mph
34,000
Speed
50 mph
68,000
Speed
75 mph
102,000
Speed
100 mph
136,0003
4 60,000 120,000 180,000 240,000
6 138,000 276,000 414,000 552,000
8 240,000 480,000 720,000 960,000
12 550,000 1,100,000 1,650,000 2,200,000
Si=e, Speed and Capacity. The carrying capacity of the pipeline is determined by multiplying thecontainer cross-sectional area with the system velocity. The cross-sectional area is determined by the electedcontainer diameter. However, the speed can be changed at any time later which in turn changes system
capacity. Table 1 shows the pipeline capacities for various sizes and speeds when running continuously for24 hours. Conversion factors are (a) one barrel = 42 gallons, (b) 7.48 gallons = 1 cubic foot, (c) oil weight
is 55 pounds per cubic foot and (d) 550 foot-pounds/sec = one horsepower. These factors were used to
674

compute the data in Table 1 and also the energy use of the system, which is reflected in operating andmaintenance expenses of later chapters.
COMPARING MAGLEV COST WITH THE ALASKA (PUMPED) PIPELINE
About 25 years ago, oil was discovered in Prudhoe Bay, Alaska. As shipping lanes were blocked mostof the year by ice, a 48-inch diameter, 800 miles long, 2,000,000 barrels per day pipeline was constructed toValdiz. Completed in 1976, it cost in excess of $9 billion, or over $11 million per mile. Taking inflationfrom 1976 to 1993 as roughly I00%, it follows that if the Alaska pipeline were to be built today it wouldcost about $22 million per mile. This would compare with the above 1993 estimated maglev pipeline costof $500,000 plus costs of environmental stuff, right-of-ways, end facilities, service roadways, power linesand power generating plants. Without going into too much detail, let's be generous and say we could buildthe maglev pipeline ;vith everything included lbr $4 million per mile in 1993 dollars, or we could have builtit for $2 million per mile in 1976. Table 2 shows reported Alaska pipeline statistics (ref. 1), and Table 3compares the Alaska pumped pipeline cost of $11 million per mile with our maglev pipeline cost of $2million per mile (both 1976 dollars).
Table 2. Alaska Oil Pipeline Operating Results, 17 Years Recorded, 3 Years Estimated
1
2
34
5
67
8
9
I0
II
12
13
14
15
16
17
1819
2O
Million TariffBarrels Rate
Year per Day $/Barl.(a)
1976 0
1977 0.3
1978 I. I 6.00
Oper.Expense$/Barl.
TaxLoading
Rate
(b) (c) (d)6.00 0.4 0.33
6.00 0.6 0.33
0.8 0.33
1979 1.2 6.00 1 0.33
1980 1.5 6.00 1.2 0.33
1981 1.5 6.00 1.2 0.331982 1.6 6.00 33
1983 1.7 6.00 33
1984 1.7 6.00 33
1985 1.8 5.00 33
1986 1.8 4.75 33
1987 2 3.90 0.21988 2.1 3.40 0.2
1989 1.9 3.50 0.2
1990 1.8 4.00 0.21991 1.8 3.50 0.2
1992 1.8 3.70
1993 1.7
1994 1.7
1995 1.6
0.2
1 0.
0.9 0.0.8 0.
0.7 0.
0.65 0.
0.580.57
0.83
1.1
1
1.2
1.25
1.32
1.35
3.50 0.2
3.60 0.2
3.50 0.2
Comtnents Oll Table 2. This data was extracted from evidence presented in 1992_ to the Federal Energy
Regulator 3, Commission (ref. 1). Table 3 uses this data as follows: Annual revenues, columns (a) x (b) x365, annual expenses, columns (a) x (c) x 365, annual income taxes, columns (a) x (b) x (d) x 365. An
675

'After Tax Margin' of 6.4% as return on investment or profit was arbitrarily elected by the owners of thepipeline, the annual total of which is calculated by multiplying 0.064 with the amounts of investmentbalance, columns (g) and (k) in Table 3.
Table 3. Investment Comparison of Pumped vs. Maglev Pipeline Using Recorded Alaska PipelineData ($1,000,000)
676
Common Data Pumped Pipeline
After Invest-Rev- Tax 0 & M Tax Earned ment
Year enue Margin Expense Margin Surplus Balance(a) (b) (c) (d) (e) (f) (g)
1 0 0
2 657 2173 2409 795
4 2628 867
5 3285 1084 6576 3285 1084 ......657
7 3504 1156 584
8 3723 1229 5589 3723 1229 496
10 3285 1084 460
11 3121 1030 427
12 2847 569 423
13 2606 521 437
14 2427 485 5762628 526 723
O&MExpense
(h)
15
_16 2300 460 65717 2431 486 788
18 2172 434 776
19 2234 447 819
540 1004
Maglev Pipeline
AfterTax
Margin(i)
EarnedSurplus
(J)
Invest-ment
balance
(k)0 577 -577 960C 65 114 -179 1966
66 614 -240 984C 67 126 247 1719321 630 663 9177 70 110 1434 285
438 587 735 844'2 73 18 1669 -I 384
743_ 76 -89 2214 -3598
476 1068 637C
408 1356 5014
339S1619
-19-1684
-3646
-S527-7247
321 1615
218 1780
104 1637
- 1 1665-108 1962
-233 1881
'-'354 1720
-464 1844
-582 1764
-695 1851
-81 3 1775
-927 1895
-1048 1895
79
82
85
89
9296
100
104
108
112
117
122
126
131137
-9091
-10855
-230
-381
-550
-740
-941-1 136
-1336
-1561
-1788
-2020
-2276
-2532
-2811-3094
-1270C
-3398
-14481
2352
2646
2959
3145
3049
3131
3514
3542
3622
4010
39994356
4422
4750
4897-16376
20 2044 409 788 -18271
-5950i r
-8596
-11555
-14701
-17750
-20881
-24395
-27937
-31559
-35569-39568
-43923
-48345
-53O95
-57992
Comments on Table 3. 1976 was the start up year without saleable production. Earned surpluscolumn (f) = (b) - (c) - (d)- (e) and column (j) = (a) - (c)- (h) - (i), Investment balance is reduced annuallyby earned surplus, except at the beginning when it was increased due to negaUve earned surplus. Note howthe pumped pipeline reached payoff in eight years and maglev in two years after the start of production.

Table 4. Computation $10 Million per Day Financial Advantage of Maglev over Pumping, Based onActual Alaska Crude Oil Pipeline Experience ($1,000,000)
Year
1
2
3
4
5
67
8
9
10
11
1213
14
15
16
17
18
19
20
Pumped(a) (b)
-577 577
-240 614
663 630
735 587
1004 540
1068 476
1356 408
1615 321
1780 2181637 104
1665 - I
1962 -1081881 -233
1720 -354
1844 -464
1764 -582
1851 -695
1775 -81 31895 -927
1895 -1048
Naglev(c) (d)
-179 114
247 126
1434 110
1669 18
2214 -89
2352 -2302646 -381
2959 -550
3145 -740
3049 -941
3131 -1136
3514 -1336
3542 -I 561
3622 -I 788
4010 -20203999 -2276
4356 -25324422 -281 1
4750 -3094
4897 -3398
Annual AnnualMaglev MillionSavings Barrels
(e) (f)861 0
975 1101290 402
1503 438
1839 548
1991 548
2079 $84
2215 621
2322 621
2456 657
2601 657
2781 730
2989 767
3336 6943722 '657
3929 657
4342 657
4645 621
5022 621
5352 584
20-year average:
DailyMaglevSavings
(g)0.00
2.673.54
4.12
5.04
5.45
5.70
6.07
6.36
6.73
7.12
PresentValueof (g)(e)0.00
5.83
7.35
8.15
9.50
9.79
9.74
9.89
9.879.94
10.03
7.62 10.218.19 10.45
9.14 11.11
10.20 11.81
10.77 11.87
11.90
12.73
12.49
12.73
13.76 13.10
14.66 13.30
7.59 9.86
Comments on Table 4 and Figure 5. The Alaska pipeline construction was financed on extremelyfavorable terms (6.4% interest) by oil companies who expected to later benefit greatly from its use. (See also"Comnlents on Table 2"). In the first five columns of Table 4 a more realistic investment value of 12.8% is
imputed (by subtracting the 'After Tax Margin' of 6.4% a second time) and thereon computing the maglevover pumped pipeline savings: (e) = ((a) - (b))- ((c) - (d)). Table 4_:olumns (a), (b), (c) and (d) are copiesof columns (f), (e), (j) and (i) of Table 3. The last column (e) of Table 4 then shows that a maglev crude oilpipeline in Alaska could have saved an average of about $10,000,000 per day over a 20 year period for atotal of 20 x 365 x $10 million = $73 billion. Column (e) is annually compounded present value of column(g) at 5% interest.
677

01,Ltll
l
@,jJ
10000
I
0
-I0000
-20000
-30000
-40000
-50000
-GO000
Pumped pipeline75
I 1985 1990
2 3 4 7 8 9 1011 14 15 16 17 18 19
Maglev pipeline
This difference worth about $10,000,000 per day
Years
2O
Figure 5. Amortization curve comparison of existing Alaska pumped pipeline with maglev pipelinebased on reported 'After Tax Margin' of 6.4% as shown in columns (g) and (k) of Table 3. It shows
that 20-year average savings worth $t0 million per day could have been achieved with a maglevcrude oil pipeline instead of the existing pulnped oil pipeline.
General consensus in the oil industry is that the Alaska oil pipeline was a financial disappointment. Itwas built with a view of oil prices rising and remaining around $40 per barrel, which would have justified a
$6 per barrel pipeline transportation charge. Instead the oil prices dropped back down to less than $20 perbarrel. The above tables and Figure 5 bear this out. If the investors in the Alaska pipeline had demanded amore normal 'After Tax Margin' of around 13% instead of 6.4%, the pipeline company would have quickly
g°ne bankrup L ....
MAGLEV CRUDE OIL PIPELINE FUTURE - HOW ABOUT KASAKHSTAN?
There are several regions in the world where large oil fields are indicated which have limited economicaccess to markets. One of them lies in Tengiz, Kasakhstan, where a 1500 mile long maglev crude oil
pipeline could economically carry the oil to a Black Sea shipping port. However, the maglev picture there isnot quite as rosy as shown above for Alaska. In addition to this line being about twice as long as the Alaskapipeline, the required capacity is only 1,000,000 barrels per day instead of Alaska's 2,000,000 barrels perday. Furthermore, investors are not likely to be found who would advance capital at 6.4% as they didin Alaska.
678
2
£
Z
=
=
i_
z

Table 5 and Figure 6 show 15-year projected financial results of a 1500 mile long maglev crude oilpipeline in Kasakhstan, starting with 250,000 barrels per day' in the first year and increasing in 5 years to1,000,000 barrels per day', financed and taxed under conditions generally found in the U.S.A., i.e., 70%debt, 30% equity, interest on debt 13%, return on equity 20%, (combined cost of money 15.1%), costescalation 5%, income taxes dO%, tax depreciation 10%, property taxes 1%. Table 5 shows the resultassuming that original construction cost was $4 million per mile and revenues at $4.00 per barrel (plusannual escalation). Figure 6 shows three curves, $4, $3 and $2 million per mile original construction costlevels with respective $4.00, $3.00 and $2.00 per barrel revenue levels ('also plus annual escalation).
Table 5. 15 Year Projected Financial Results of 1500 Mile, 1,000,000 Barrels per Day MaglevCrude Oil Pipeline in Kasakhstan at Original Cost Estimate of $4 Million per Mile and Revenues at$4.00 per Barrel ($1,000,000)
LineProp.
Year Revenue Opr. Exp Taxes(a) (b) (c)
1 1996
2 1997
3 19984 1999
5 2000
6 2001
7 2002
8 2003
9 2004
10 2005
11 2006
12 2007
13 2008
14 200915 2010
Tax
Deprec.(d)
Intereston Debt
(e)
IncomeTax
(f)
Returnon
Equity(g)
Debt
Repay-ments
(h)
Remain.Debt
Balance
(i)423 131 90 845 769 0 507 -872 9327
665 137 92 845 849 0 560 -748 10075932 144 94 845 917 0 604 -586 10661
1223 151 96 845 970 0 640 -378 11039
1798 159 98 845 1005 0 662 139 10900
2157 167 100 845 992 21 654 485 10415
2265 175 102 845 948 78 625 587 9828
2378 184 104 845 894 140 590 702 9126
2497 193 106 845 830 209 548 830 8295
2622 203 108 845 755 284 498 973 7322
2753 213 110 845 666 367 439 1133 61892'891 224 112 845 563 458 371 1310 4879
3035 235 114 0 444 897 293 1170 3710
3187 247 117 0 338 994 223 1358 23511413346 259 119 0 15681102214 783
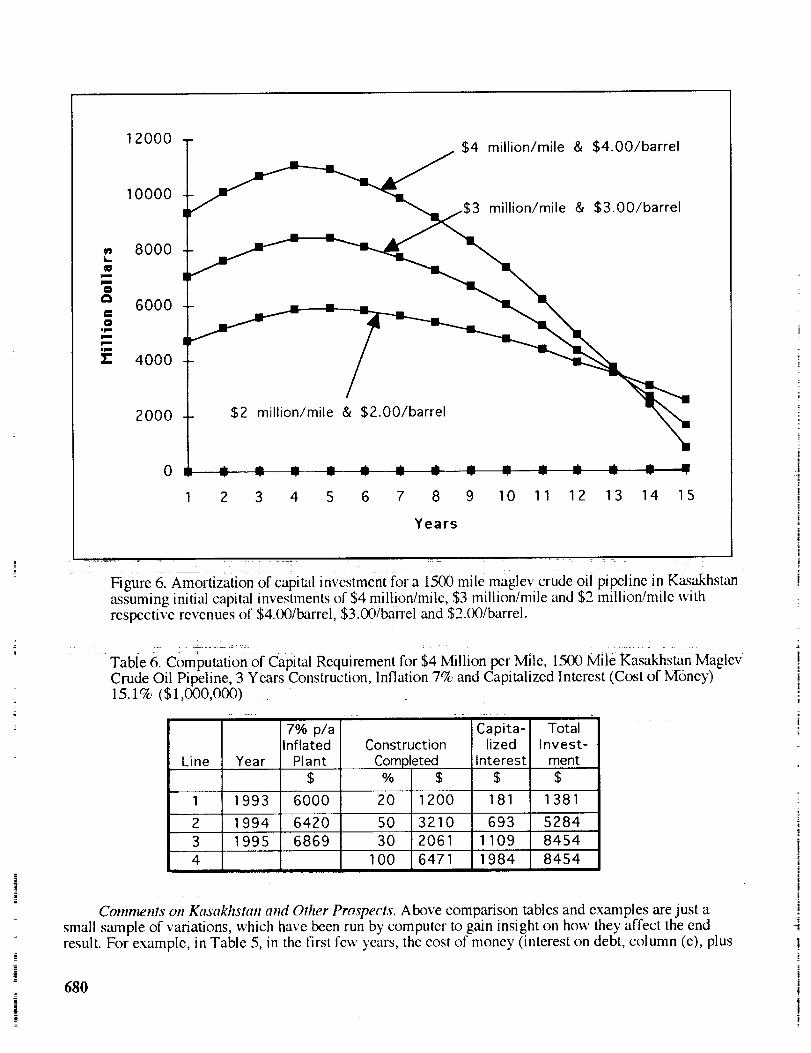
Table 6 shows how the initially estimated capital requirement of $4 million/mile times 1500 miles = $6billion increases bv inflation and capitalized interest during three years' of construction to $8.454 billion.This amount plus first year loss of $0.872 billion (Table 5, line (I), column (h)) equals the $9.327 billion inTable 5, line (1), column (i).
679i
kU
J
O,Im
I:
12000
10000
8OOO
6OOO
4000
2000
0
$2 million/mile & $2.00/barrel
$4 million/mile & $4.00/barrel
million/mile & $3.00/barrel
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Years
" : : -_ :: .... 7 Z
Figure 6. Amortization of capital invcstment ?or a lS00 mile maglev crude oil pipeline in Kasakhstan :assuming initial capital investments of $4 million/mile, $3 million/mile and $2 rnillion/mile withrespective revenues of $4.00/barrel, $3.00/barrel and $2.00/barrel.
-Table 6. Computation of Capital Requirement for $4 Million per Mile, 1500 Mile Kasakhstan MaglevCrude Oil Pipeline, 3 Years Construction, Inflation 7% and Capitalized Interest (Cost of Money)
is. 1% ($1,ooo,ooo)
Line
1
2
34
Year
1993
7% p/aInflated
Plant$
6000
Capita-lized
Interest
$
ConstructionCompleted% $
20 1200
50 3210
30 2061
100 6471
181
TotalInvest-
ment
1381
1994 6420 693 5284
1995 6869 1109 84541918"4 - 8454
Comnwnts on Kasakhstan and Other Prospects. Above comparison tables and examples are just asmall sample of variations, which have been run by computer to gain insight on how they affect the endresult. For example, in Table 5, in the first few years, the cost of money (interest on debt, column (e), plus
680
i,|
i

return on equity, column (g)) is more than 10 times as large as operating, expense, column (b). Hence,keeping capital costs down is much more important than keeping operating expenses down. Figure 6 showsthe amortization curves rising in the first few years due to the losses as calculated in Table 5, column (h),lines (1) to (4). If oil field prcx.tuction could be started at full capacity in the first year of pipeline operations,billions of dollars could be saved. However, in Alaska, it took five years before they had enough oil for the
pipeline to run at full capacity. As to the cost of money, if one could finance a project with just one percentless in interest, for example cut interest on debt from 13% to 12% for the $4 million/mile curve in Figure 6,it would mean construction cost savings of $100 million and 15 year operations savings of $1.5 billion.
GREAT OPPORTUNITY FOR HIGH TECH AND MONEY MAKING
The above described basic components of the maglev crude oil pipeline, the permanent magnets, thelinear induction motors and the container string with its folding function, are all pretty well straight forward
and relatively simple and reliable technologies. There are opportunities for improvements in magnets,materials and container design, but the most challenging tasks lie in the field of maintenance (especially
leakage prevention), lateral guidance, controls and failure prevention.
L#war hsduction Motors (IYMs) and Controls. As stated in Figure 2 above, LIMs may be spaced asmuch as 100 miles apart at unmanned stations. However, the LIM shown in Figure 2 is only suitable fordriving the system at high speed. For start up, intermediate speeds and reverse braking, several otherspecially designed LIMs are to be located next to the high speed LIMs. Additionally, for every type of LIMneeded in operations throughout the speed range and reverse braking there will need to be one or more LIMsof equal size on standby. Motors may need to either be c_x_led heavily during start up or switched on and offin rotation. As an example, there might be five heavy thrust start up LIMs at each station that get thecontainers up to a speed of 5 mph. Each would take a turn and run for 20% of the time, and be off 80% ofthe time for cooling. There would also be a danger of overheating the containers. They must not stay toolong over an active LIM.
To get a comparison of the magnitude, the largest movements of weight on land are unit trains for coal,ore or grain. They often have 100 cars, each carrying 100 tons for a total of 10,000 tons per train. A 100mile long section of a maglev pipeline, having a capacity of 1,000,000 barrels per day, would weigh alsoabout 10,000 tons (not counting the empty return line). So, the starting LIMs for each 100 mile section ofmaglev pipeline would have to exert a propulsion effort comparable to that of the (usually) eight locomotivesof a unit train. However, for a 1500 mile Kasakhstan line it would require an effort equivalent to 120locomotives. While this looks like an enormous physical task, the cost savings with magIev as calculatedabove would also be enormous.
Power Supply to IJM Stations. The Alaska pipeline has a mi_ of energy sources for pumping. NearPrudhoe Bay several pump stations receive natural gas from the oil field. Further along, oil from the line isdropped off, refined and then used for jet engine powered pumping. Also some power is obtained fromprivate utilities. A maglev pipeline would probably also lc_k at the best available but reliable source. If noother sources are available, one or more small power generating stations would be built and power linesstrung along the same posts that carry the pipeline, see Figure 4.
Surge Suppressors. Common at hydroelectric power stations are surge towers for the purpose ofpreventing structural damage from sudden shut downs of the turbines following a power failure. Thetremendous kinetic energy of the approaching water is dissipated by rising up in these surge towers andoverflowing. The long stream of maglev pipeline containers has a similar problem and a similar solution.Along the line at intervals are longitudinal surge suppressor stations. These are kx:ations where thecontainers are, for a short distance, forced by an upper and lower track to partially fold, similar to what is
shown in Figure 3, above. However, unlike the rigidly fixed lower track in Figure 3, the lower track in asurge suppressor station is vertically movable so that it can absorb longitudinal surges that may run through
681

the containers. These stations also serve to compensate for longitudinal temperature expansions andcontractions of the containers.
l_ztteral Guidance of Containers. Some 150 years ago, a transportation scientist by the name ofEarnshaw, after experimenting with permanent magnets in repulsion, declared that 'it is impossible tosuspend vehicles with permanent magncts in repulsion without secondary help', which is today known asEarnshaw's Theorem (ref. 4). While Einstein was able to refute Newton, nobody has yet been able to refuteEarnshaw. Hence, we are stuck with the need for lateral guidance to ensure that the containers stay abovetheir magnetic track and not fall off to the sidcs. Several methods of lateral guidance controls have beensatisfactorily tested. They are items (I) to (3) below. However, items (4) and (5) below are being l_x_ked at
as possible future "_ternatives.
(1) Self-adjusting, self-lubricating commercially available plastic sliders attached in pairs to each side
of each container. The sliders follow polished stainless steel lined channels which are attached to the insideof the conduits, see left half of Figure "71Thesliders are peri0d_caJiy renewedl Unlike cieciro magneiic : i: :
systems described below, this latcral guide meth_l is fully operational throughout the speed range and needsno backup support system in case of power failure or at slow spee&:
(2) Shown in the right half of Figure 7 are electro magnets attached in pairs to each side of eachcontainer, which are controlled by a gap sensor. A gap separates the electro magnets from dua!channelswith steel inserts. Power for the electro magnets may be generated off the permanent track magnets thatsuspend the containers (Figure 1). This system requires backup support in Case of power failure andpossibly also at low speed.
(3) Electro magnets with steel rails as in (2) above, except they are switched around. The electromagnets _e stationary and the steel rails are attached to the moving containers. Power for the electromagnets can be either generated off the permanent magnet track or supplied by power lines that run along thepipeline. This system also requires backup support in case of powcr failure.
Steel liner Plastic sliderOil filled containers Electro magnet
Conduits Steel insert
Channels
682
Mechanical " EJectro magnetic
Figure 7. Typic.,fl choices of lateral guidance systems, mechanical or electro magnetic. For clarity,
levitation magnets and LIMs are not shown.
=
=
=
7.
_2

(4) New magnetic suspension technology achievements as reported in NASA's 1991 first InternationalSymposium on Magnetic Suspension Technology (ref. 7). These include practical applications of replacingfriction bearings of rotary machinery with non-contact electro magnetic bearings. It seems feasible to havethe container string of the maglev pipeline take the place of a rotating shaft of similar diameter and likewisehave it controlled to remain contactless in the center while moving along at great speed. This system would
also need backup support in case of power failure.
(5) A possible break-through in technology. Magnetic suspension by means of permanent magnets inrepulsion is somewhat similar to riding a bicycle. At no speed and at low speed both have a strong tendencyto fall over. However, at high speed it is nearly impossible to tip over with a bicycle. Remember, the kidshouting: 'Look Ma, no hands'? A bike becomes more and more self-steering as speed increases. By thesame token, it should be possible to develop a kind of magnetic rudder that automatically steers the maglevcontainers through the center of the conduits when at high speed. Backup guidance support would be need at
low speed, but power failures might not affect it.
Quality Controls and Failure Protection. If a light bulb goes out in a life buoy' that marks a shippingchannel, an automatic mechanism rotates another bulb in its place. If the second one goes, a third one comes
up. New aircraft engines are tested numerous times. After each test, they are taken apart, checked and X-rayed until the probability of future failure has become extremely low. These are two examples of how toprevent-disasters of major proportions. Both aircraft and shipping disasters, in addition to loss of life, canrun into millions, even billions of dollars.
The above Kasakhstan pipeline proposal would car D' 1,000,000 barrels of oil per day; that meansabout a million dollars' worth of oil every hour. Figure 6 shows how running at less than full capacity in the
first five years has increased the indebtedness instead of decreasing it. It is obvious that any delay,breakdown or shut down would run into big financial losses. Hence, life buoy style, aircraft style and even
better quality controls must be incorporated in design, operations and maintenance of a maglev crude oil
pipeline, which might be the subject of a future paper.
CONCLUSION
It is obvious that, as easily accessible sources of fossil fuel become depleted, a more economic landtransportation mode needs to be developed. The 800 mile long Alaska (pumped) pipeline is an example ofunsatisfactory and uneconomical present day pumping technology. Other remotely' located oil fields lieuntapped as they wait for advancements in trans[:x_rtation technology. Magnetic levitation is that newadvancement in technology. A maglev crude oil pipeline could go very long distances and still be highlyprofitable in the hands of private enterprise. In the Alaska case, $10 million per day ($73 billion over 20years) might have been saved, had the maglev technology been available and had it been used. Twice as longas the Alaska pipeline, a maglev crude oil pipeline from Tengiz in Kasakhstan to the Black Sea wascalculated above to be also financially feasible.
The major components of the maglev crude oil pipeline are either mechanical or basic electrical innature, which may need little further refinement. However, there are several areas of design and operationswhich need to be addressed and refined. To name a few, operational safety, quality control, failure
prevention, start up procedure, shutdown procedure, lightning strikes, leakage, spills, earthquakes, groundshifting, temperature extremes, vandalism, guerilla attacks, etc. It is not going to be a simple project.However, the future looks bright fc_r maglev pipelines. There is an immediate need to also transport c_.xal,grain and ore more economically'. Further into the future, it may some day be economically feasible totransl:x_rt water by, maglev pipeline from the north to arid lands in Arizona, New Mexico and Texas and turnthem into lush green agricultural lands to supplement the world ik×)d supply.
683

REFERENCES
i. Official Stenographers Retx-_r_, Federal Energy Regulatory C6mmissi0n, Docked No: iSCy'2-3-000,Technical Conference, Amerada Hess Pipeline Company, June 3, 1992. ,:
2. Knolle, E. G.; Knolle Magnetrans, A Magnetically Levitated Train System,, NASA CP 3152,August 19-23, 1991, pp. 907-918.
" 7
Strnat, K. J., Rare-Earth Permanent Magnets: Two Decades of New Magnetic Materials, ASM,Paper No. 8617-005, 1986: - _:_=;:-::_
z
4. Laithwaite, E. R.; Transport Without Wheels, Westview Press, Boulder, Colorado, pp. 304-317,1977.
5. Nonaka, S. and Higuchi, T. ; Design Strategy of Single-Sided Linear Induction Motors for
Propu!slion of Vehicles, IEEE Trans., Cat, No. 87CH2443-0, pp. 1-11, 1987.
6. Knolle, E. G.; Articulated Train System, U.S. Patent No.3,320,903, Re. 26673, 1969.
7. lnteruational Symposium oil Magnetic Suspension Technology, NASA Conference Publication
3152, Langley Research Center, 1991.
w
[
2
E
684

Appendix
Attendees
Byong AhnCharles Stark Draper Laboratory555 Technology SquareM.S. O3
Cambridge, MA 02139617-258-2832
Paul Allaire
University of VirginiaDept. Mech, Aerosp, NuclearThornton Hall, McCormick RoadCharlottesville, VA 22901804-924-3292
Willard W. Anderson
NASA Langley Research Center
Mail Stop 479Hampton, VA 23681-0001804-864-1718
Tyler M. AndersonBoeing Defense & Space GroupP.O. Box 3999MS 182-24
Seattle, WA 98124206-773-2291
Bill G. AsburyLockheed Engineering and Sciences144 Research Drive
Hampton, VA 23666804-766-9600
Clayton C. BearRevolve Technologies, Inc.1240 - 700 - 9 Avenue, S.W.
Calgary, Alberta T2P 3V4 CANADA403-261-5338
Brij B. BhargavaAshman Consulting ServicesP.O. Box 3189
Santa Barbara, CA 93130-3189805-964-2104
Barry BlairWaukesha BearingsP.O. Box 1616
Waukesha, WI 53187414-547-3381
685

Karl BodenKFA-IGVPF-1913W-5170Julich D-52425 GERMANY49-2461-614604
Dr. Hans J. BornemannKernforschugszentrum KarlsruheINFP, P. O. Box 364076021 Karlsruhe GERMANY49-7247-82-6389
Lyle A. BranaganPacific Gas & Electric
3400 Crow Canyon RoadSan Ramon, CA 94583510-866-5735
Colin P. Britcher
Old Dominion University
Dept. of Aerospace EngineeringNorfolk, VA 23529-0247804-683-4916
Thomas C. Britton
Lockheed Engr. and Science Co.24 West Taylor RoadMail Stop 161Hampton, VA 23681-0001804-864-6619
Stephen ChapmanMagnetic Bearings, Inc.524i Valleypark DriveRoanoke, VA 24019703-563-4936
David E. Cox
NASA Langley Research CenterMail Stop 161Hampton, VA 23681-0001804-864-8149
Harold R. Davis
The University of British ColumbiaDepartment of Physics6224 Agricultural RoadVancouver, B.C. V6T 1Z1 CANADA604-822-2961
686
Dr. Horst Ecker
Technical University ViennaInst. fr. Machine Dyn. & MeasuremtWiedner Hauptstr. 8-10/303Vienna A-1040 AUSTRIA43-222-58801-5567
James H. Eggleston46th TEST Group/TKE1 E21 EST Track RoadHolloman AFB, NM 88330-7847505-679-2941
James B. Fischer
Electron Energy Corporation3307 E. Romelle Avenue
Orange, CA 92669714-538-7328
Martha L. Fisher-Votava
Sundstrand Aerospace4747 Harrison AvenueRockford, IL 61125-7002815-394-2729
Karl FlueckigerCharles Stark Draper LaboratoryMail Stop 3H555 Technology SquareCambridge, MA 02139617-258-3850
Lucas E. Foster
Old Dominion University
Dept. of Aerospace EngineeringNorfolk, VA 23529-0247804-683-3720
Giancarlo GentaPolitecnico di Torino
Mechanics DepartmentC. Duca degli Abruzzi24-10120 Torino, ITALY39-11-5646901
Michael J. GoodyerThe University of Southampton
Dept. of Aero. and Astro.Southampton SO9 5NH ENGLAND44-703-592374
687

Henry GuckelWl Cntr for Applied MicroelectronicsElectrical & Computer Engineering1415 Johnson Drive
Madison, WI 53706-1691608-263-4723
Ram GurumoorthyGECRD1 River Road
Bldg. K-l, Rm. 4C20Schenectady, NY 12065518-387-6657
Roy D. HamptonUniversity of VirginiaROMAC Labs, Mech & Aero EngrgThornton Hall, McCormick RoadCharlottesville, VA 22901804-924-3767
Lee M. HartwellRKR Associates1607 Southwood Blvd.
Arlington, TX 76013817-795-7124
Robin Harvey
Hughes Research Labs3011 Malibu Cyn RoadMalibu, CA 90265310-317-5236
Toshiro HiguchiUniversity of TokyoKSP East 405, 3-2-1 SakadoTakatsu-kuKawasaki-shi 213 JAPAN81-44-819-2048
Kwok W. Hui
Dresser Rand CompanyP. O. Box 560Olean, NY 14760716-375-3328
688
John Y. HungAuburn UniversityDept of Electrical Engineering200 Broun Hall
Auburn University, AL 36849-5201205-844-1813

James D. HurleyMechanical Technology Inc.968 Albany Shaker Rd.Latham, NY 12110518-785-2177
A. Dean JacotBoeing Aerospace CompanyP. O. Box 3999MS 82-24Seattle, WA 98124206-773-8629
Graham JonesTechnology Insights10240 Sorrento Valley RoadSuite 320San Diego, CA 92121619-455-9080
Brian R. JonesLawrence Livermore Nat. LaboratoryP. O. Box 808L630Livermore, CA 94550415-423-3058
Swarn KalsiGrumman CorporationM/S B29-25Bethpage, NY 11714516-356-9624
Yoichi KanemitsuEBARA Research Company, LTD.MSR Dept., Electro-physics Lab.2-1, fujisawa 4-chomeFujisawa-shi 251 JAPAN81-466-83-7640
Claude R. KecklerNASA Langley Research CenterMail Stop 479Hampton, VA 23681-0001804-864-1718
Allan J. KelleyThe University of TokyoKanagawa Academy of Sci. & Tech.KSP E. 405, 3-2-1 SakadoTakatsu-ku Kawasaki 213 JAPAN81-44-819-2093
689

Yoshida KinjiroKyushu UniversityDept. of Electrical Engineering6-chome 10-1, Hakozaki Higashi-kuFukuoka 812 JAPAN092-641-1101, X5307
Ronald L. Klein
West Virginia UniversityDept of Electrical/Computer Eng.P.O. Box 6101
Morgantown, WV 26506-6101304-293-3998
Josiah D. Knight _ _ Ernst G. Knolle
Duke University Knolle MagnetransDept. of Mechanical Engineering 2691 Sean Cou_ ...... _ _
Box 90300 ' S. San Francisco, CA 94080 •Durham, NC 27708-0300 415-871-9816 " =919-660-5337 :
S. KohlerSandia National Laboratories
Albuquerque, NM 87185
John C. KroegerHoneywell Satellite Sys.Box 52199
Phoenix, AZ 2199 ,602-561-3175
690
Dr. Alexander V. KuzinUNC-Charlotte
Precision Engineering LabCharlotte, NC 28223704-547-4324
Jaynarayan H. LalaCharles Stark Draper Lab., Inc.555 Technology SquareMS 73
Cambridge, MA 02139617-258-2235

Kyong B. LimNASA Langley Research CenterMail Stop 161Hampton, VA 23681-0001804-864-4342
Chin E. LinNational Cheng Kung Univ.Inst. of Aeronautics and AstronauticsTainan 70101 TAIWAN886-6-274-1820
Reinhard F. LuerkenThyssen Henschel America, Inc.2730 Wilshire BoulevardSuite 500Santa Monica, CA 90403310-828-9768
James P. LyonsGE Corporate R&DP.O. Box 8, EP-116Schenectady, NY 12309518-387-5015
Sam MallicoatMicrofield Graphics, Inc.9825 SW Sunshine CourtBeaverton, OR 97005503-626-9393
Oliver MarrouxAerospatiale66 Route de VerneuilLes Mureaux, 78133 FRANCE33-1-34922822
David B. MartinNorthrop ATDCN214/XA8900 E. Washington BoulevardPico Rivera, CA 90660310-942-3362
Osami MatsushitaThe National Defense AcademyDept. of Mechanical Engineering603 Kandatsu-machiKanegawa JAPAN 23981-468-41-3810, X2326
691

Wally McLellanMagnetic Bearings, inc.5241 Valleypark DriveRoanoke, VA 24019703-563-5936
Chase K. McMichael
Texas Center for SuperconductivityUniversity of Houston4800 Calhoun
Houston, TX 77204-5506713-743-8254
James L. MilnerNational Maglev Initiative, USDOT400 7th Street, S.W.Room 5106, RDV-1
Washington, DC 20590202-366-0515
R. Mark Nelms
Auburn UniversityDept. of Electrical Engineering200 Broun Hall
Auburn, AL 36849205-844-1830
Steven A. NolanRockwell International
Rocketdyne Division, Mail Stop IA326633 Canoga Avenue, P.O. Box 7922Canoga Park, CA 92309-7922818-718-4430
Alan B. Palazzolo
Texas A&M UniversityMechanical EngineeringCollege Station, TX 77843-3123409-845-5280
Da-Chen PangUniversity of MarylandDepartment of Mech. Engg.College Park, MD 20742301-405-787
Richard F. PostLawrence Livermore National Lab
P. O. Box 808, L-644Livermore, CA 94551510-422-9853
_= 692

A. K. PradeepGeneral Electric CR&DP. O. Box 8
Schenectady, NY 1230151 8-387-6588
Mark A. Preston
General Electric Corporate R&DP. O. Box 8, Building EPRoom 116
Schenectady, NY 1230151 8-387-5588
Douglas B. PriceNASA Langley Research CenterMail Stop 161Hampton, VA 23681-0001804-864-6605
Michael Proise
Grumman CorporationMail Stop B29-25Bethpage, NY 11714516-346-2100
James C. RipleAllied Signal28626 Vista Madera
Rancho Palos Verdes, CA 90732310-512-4586
James D. RobergeSatCon Technology Corporation12 Emily StreetCambridge, MA 02139617-661-0540, X272
Robert SalterXerad1526 14th Street
Santa Monica, CA 90404
Philippe Save De BeaurecueilSouthern California Edison CompanyGO3 Third Floor2131 Walnut Grove Avenue
Rosemead, CA 91770818-302-8272
693

Dr. Hideo Sawada
National Aerospace Laboratory7-44-1 Jindaijihigashi-machiChofu-shi
Tokyo 182 JAPAN81-422-47-5911
J. Schmeid
Sulzer Escher Wyss Ltd.Abteilung T733PostfachCH-8023 Zurich SWITZERLAND
41-1-278-3118
Richard Schoeller, Jr.Naval Surface Warfare Center
3A Leggett CircleAnnapolis, MD 21402-5067410-267-2651
Dr. Roland Y. SiegwartMecos Traxler AGGutstrasse 38Winterthur S CH-8400 SWITZERLAND
41-52-2329288
Devendra K. Sood
GE Aircraft Engines1000 Western AvenueM.D.-170MW
Lynn, MA 0191061 7-594-3061
Albert F. StoraceGeneral Electric Aircraft Engines
1 Neumann WayMail Drop A334Cincinnati, OH 45215513-774-5047
Claus C. ThiesenTechnical Services Company10510 N.E. 45th Street
Kirkland, WA 98033206-822-2609
R. TortiSatCon Technology Corp.
12 Emily StreetCambridge, MA 02139-4507617-661-0540
694

Michael Urednicek
REVOLVE Technologies Inc.1240 Western Canadian Place700 Ninth Avenue S.W.
Calgary, Alberta T2P 3V4 CANADA403-261-5329
Jim Walker
Walker Technology17561 Hada Drive
San Diego, CA 92127619-487-4788
Michael H. Walmer
Electron Energy Corporation924 Links AvenueLandisville, PA 17538717-898-2294
Mark E. Williams
University of NC at CharlottePrecision Engineering DepartmentCharlotte, NC 28223704-547-3145
695



Form Approved
REPORT DOCUMENTATION PAGE OMBNo 0704-018B
Public reporting burden for this coIlection of information is estimated to average I hour per response, including the time for reviewing instructions, searching existing data sources,gathering and maintaining the data needed, and completing and reviewing the collection of _n[ormatior_ Send comments regarding this burden estimate or any other aspect of thiscolIect_on of information, including suggestions for reducing this burden, toWashlngton Headquarters Services, Directorate for information Operations and Reports. 1215 JeffersonDavis Highway, Suite 1204, Arlington, VA 22202-4302, and to the Office of Management and Budget, Paperwork Reduction Project (0704-01B8). Washington, DC 20503.
|. AGENCY USE ONLY(Leave blank) 2. REPORT DATE 3. REPORT TYPE AND DATES COVERED
May 1994 Conference Publication
:4. TITLE AND SUBTITLE
Second International Symposium on Magnetic Suspension Technology
6. AUTHOR(S)
Nelson J. Groom and Colin P. Britcher, Editors
7. PERFORMING ORGANIZATION NAME(S) AND ADDRESS(ES)
NASA Langley Research CenterHampton, VA 23681-0001
9. SPONSORING/MONITORING AGENCY NAME(S) AND ADDRESS(ES)
National Aeronautics and Space AdministrationWashington, DC 20546-0001
5. FUNDING NUMBERS
WU 233-03-01-01
8. PERFORMING ORGANIZATION
REPORT NUMBER
_17_9
10. SPONSORING/MONITORING
AGENCY REPORT NUMBER
NASA CP-3247Part 2
11. SUPPLEMENTARY NOTES
Nelson J. Groom: Langley Research Center, Hampton, VA; Colin P. Britcher:Norfolk, VA
Old Dominion University,
12a. DISTRIBUTION/AVAILABILITY STATEMENT 12b. DISTRIBUTION CODE
Unclassified-Unlimited
Subject Category 18
13. ABSTRACT (Maximum 200 words)
In order to examine the state of technology of all areas of magnetic suspension and to review related recent devel-opments in sensors and controls approaches, superconducting magnet technology, and design/implementationpractices, the 2nd International Symposium on Magnetic Suspension Technology was held at the Wcstin Hotelin Seattle, Washington on August 11-13, 1993.
The symposium included 18 technical sessions in which 44 papers were presented. The technical sessionscovered the areas of bearings, bearing modelling, controls, vibration isolation, micromachines, superconductiv-ity, wind tunnel magnetic suspension systems, magnetically levitated trains (MAGLEV), rotating machineryand energy storage, and applications. A list of attendees appears at the end of the document.
14. SUBJECT TERMS
Magnetic bearings; Magnetic suspension; Large gap magnetic suspension; Smallgap magnetic suspension; Sensors; Superconducting magnetic suspension systems;Control systems
17. SECURITY CLASSIFICATION 18. SECURITY CLASSIFICATION 19. SECURITY CLASSIFICATION
OF REPORT OF THIS PAGE OF ABSTRACT
Unclassified Unclassified Unclassified
_ISN 7540-01-280-5500
15. NUMBER OF PAGES
278
16. PRICE CODE
A1320. LIMITATION
OF ABSTRACT
;tandard Form 2cJS(Rev. 2-8g)Prescribed by ANSI Std. Z39-18298-102