Embed Size (px)
Citation preview

Design, Modification and Fabrication of Small VTOL UAV
Under the guidance of
Prof. Gp-Capt Praveen Khanna, VSM
Akshat Srivastava (07) Aseem. H .Salim (12) Shaik Ibrahim (37) T Shan (38) Stanley Boswell (40) Tasdeeq Rahim Sofi (44)
Submitted by:

Road Map Arrival at Design
Material Selection
Frame Design on CATIA
Structural Analysis in CATIA and ANSYS
Flow Analysis in ANSYS
Fabrication
Testing

Comparative Study and Design Selection
A) Fixed Wing B) Rotating Wing a) Vertical Take off b) Fixed wing Vertical Take off A. Two rotor design
1. Transverse rotor design 2. Tilt rotor design ( Bell Boeing V-22 Osprey)
B. Three rotor design ( Tricopter) C. Quad copter design • Two rotor design • Quad rotor Design
Rotating wing configurations ( Vertical Take-off)
Selected the desired configurations
Two major configurations of UAV

Selected Design Comparison
Scorpid 500 UAV Simple Tilt Rotor Configuration
Quad Rotor Configuration

MATERIAL SELECTION
DESIGNING THE FRAME
COMPONENTS OF THE FRAME
SHAPE
PLACEMENT OF ELECTRONIC COMPONENTS

DEFLECTION
PRINCIPAL STRESS
VON MISES STRESS
MAX. SHEAR STRESS

PITCH DIRECTION
YAW DIRECTION
ROLL DIRECTION
CONTROLLING PITCH/ROLL
CONTOLLING YAW
CONTROLLING ALLITUDE

THRUST VS VOLTAGE DROP
VELOCITY VS THRUST DISC LOADING VS PROPELLER RADIUS
ANGULAR VELOCITY VS VOLTAGE DROP

VELOCITY CONTOURS
STATIC PRESSURE CONTOURS
TURBULENT K.E
DYNAMIC PRESSURE

RADIAL VELOCITY
VELOCITY PLOT
PRESSURE PLOT
TOTAL PRESSURE PLOT

Quad copter booms were made using hollow square cross section
Aluminium bars.
Central hub for placing control board and battery are made using
square Aluminium plate.
Aluminium bars and Aluminium plates were drilled to hold them
together
Landing gears are made using bended plastic tubes and attached at the
edges of each booms.
FRAME CONSTRUCTION
SOLDERING ELECTRONIC COMPONENTS
Soldering has been done on different electronic components for fixing bullet connectors.
Male bullet connectors have been soldered on 3 wires of each motor and female bullet connectors
are soldered to 3 wires of ESCs ,which are in turn connected with battery.
FABRICATION
Assembly of the frame using nuts and the bolts.
Attaching motor and propeller to the frame using the mount.
Attaching landing gear below each motor using the same nuts and bolts of corresponding motor.
Positioning of the Flight control Board on the top plate using nylon mounts.
Connect the motors and electronic speed control unit to the battery using wire harness and the
control board connection to the Flight control board.

System Overview of Quadcopter

Electronic components Selection • Brushless motors: 1800kv and 14.8 Amps
• ESC: 30 A constant current 40 A Burst current
• Transmitter Flysky CT6B transmitter is used
• Reciever Flysky R6B is used
• Control board: KK Multicopter- version5.5
• Battery 4400mah 30C is used.
• Wire harness

TRANSMITTER
Model: FS-CT6B
Mode: 2
Channel: 6
Frequency band: 2.4GHz
Modulation Type: Spread Spectrum
Software: T6Config.EXE

ESC calibration and programming

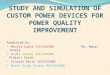
KK Multicopter Control Board
Stabilizes the flight. Take signal from three gyros(roll ,
pitch , yaw) and feed information into Atmega IC.
Take signal from RX and feeds
into the IC via aileron, elevator, throttle and rudder pin.
Specifications:
Functions:
Update firmware for Xcopter using kk Multicopter flashing tool.


Vibration Analysis
To determine the natural frequencies of the quad rotor the following Equation for the Strouhal number was used:
𝑆𝑡 = (𝑓∗𝐿)/𝑣
Where, St is the Strouhal number, f is the vortex shedding frequency of the propeller, and v is the velocity of the flow past the propeller. The Strouhal number is an experimentally determined quantity derived in wind tunnel testing and a quantity of 0.2 is acceptable in our project.
No. of Blades Length(m) ½ Radius(m) Radius(m)
2 0.018 0.127 0.254

Vibration Isolation
Passive Isolation
Active Isolation
Vibration Control has been done by:
• Passive Isolators • Materials used
– Rubber paddings – Nylon screws

First Mode
Modal Analysis Second Mode
Third Mode Fourth Mode

Fifth Mode Sixth Mode
Seventh Mode Eighth Mode

Future Works
Improvement of Strength to weight ratio.
Payload Capacity.
Additional Integration of Electronic equipments.
Autonomous Control System.
Improved Range and Endurance.
Design Improvement

Conclusion
Structural analysis, flow analysis and modal analysis has been done using CATIA and ANSYS
softwares .
Performance plots and Vibration plots are made using MATLAB.
All electronic components like battery, motors, electronic speed control units were selected
as per the requirements and calculations done.
KK Multicopter controller board which forms the heart of the design was integrated to
ensure stability to the design with the help of inbuilt Accelerometers and Gyros.
Fabrication process began with the attachment of the various structural frame components
like the main spar, four spars, main top plate, and bottom plate.
The integration and the calibration of all electronic speed control units and the multi
controller board.
A crucial deficiency was that, the team members did not have experience working from the
electronics point of view. Howsoever, a lot of time was dedicated to the study of the working
of the electronic components and the way of calibrating each of them.

THANK YOU