Embed Size (px)
Citation preview
Manifold Filtering ProblemLockheed Martin
Jarett HailesJonathan Wiersma
Richard VanWeeldenJuly 21, 2003
Outline
• Pod problem description
• Signal / Observation Model
• SERP Simulation
• Parameter Details
• Results
• IDEX Implementation
• Sketch of progress towards proof
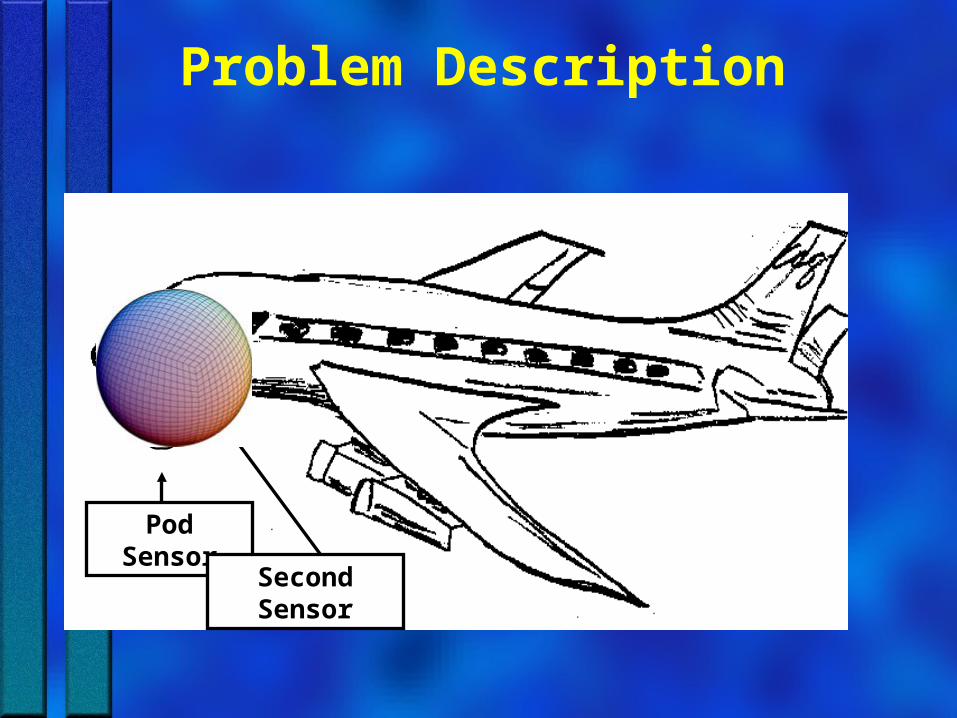
Problem Description
Pod Sensor
Second Sensor
Signal Description
233
33
:
:x
h
Process Wiener D2: tW
tttt dWXdtXhdX )()( Stratonovich SDE
3
2
1
x
x
x
X t 3 Dimensional State
Signal Constraints
2
0 0
0 )()()(k
tk
sskt dWXfAXfXf
3
10 )()())((
iii xfxhxfA
3
1
1,2 j )()())((i
iijj xfxxfA
0fAk
2
3
2
2
2
1)( xxxXf
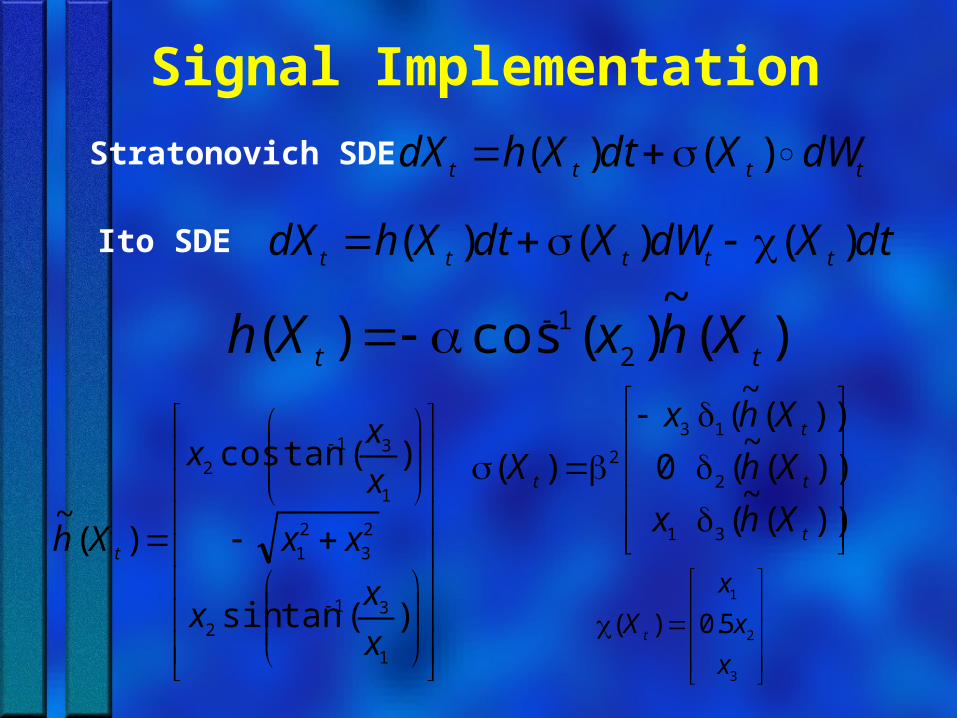
Signal Implementation
tttt dWXdtXhdX )()( Stratonovich SDE
dtXdWXdtXhdX ttttt )()()( Ito SDE
)(~
)(cos)( 2
1
tt XhxXh
)(tansin
)(tancos
)(~
1
31
2
2
3
2
1
1
31
2
x
xx
xx
x
xx
Xh t
))(
~(
))(~
(
))(~
(
0)(
3
2
1
1
3
2
t
t
t
t
Xh
Xh
Xh
x
x
X
3
2
1
5.0)(
x
x
x
X t
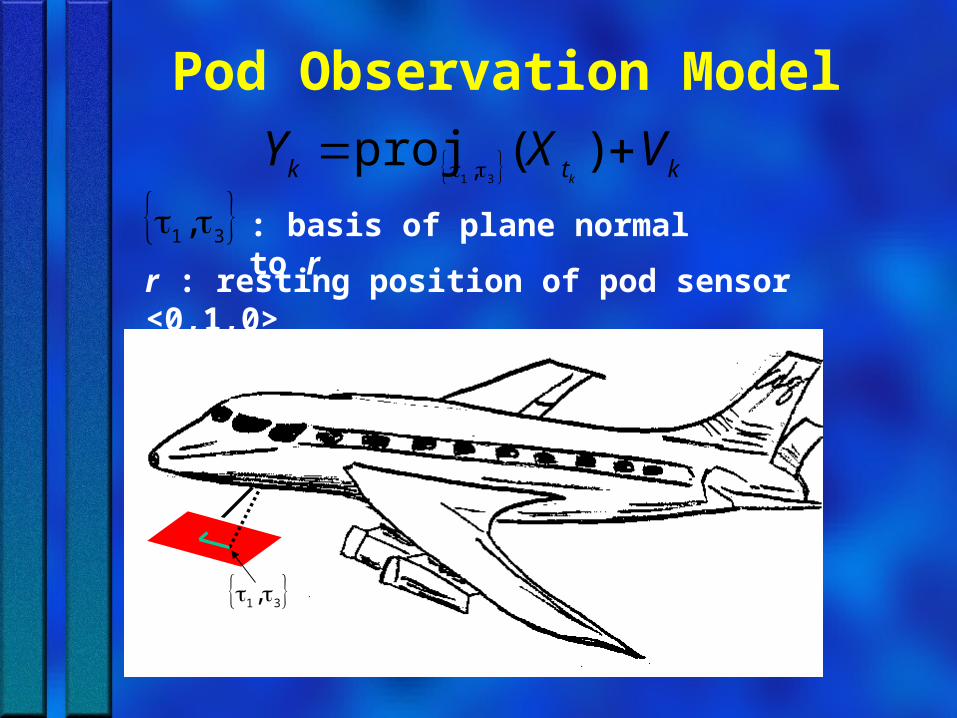
Pod Observation Model
ktk VXYk
)( proj31 ,
31, : basis of plane normal to r
r : resting position of pod sensor <0,1,0>
31,
2
4
3
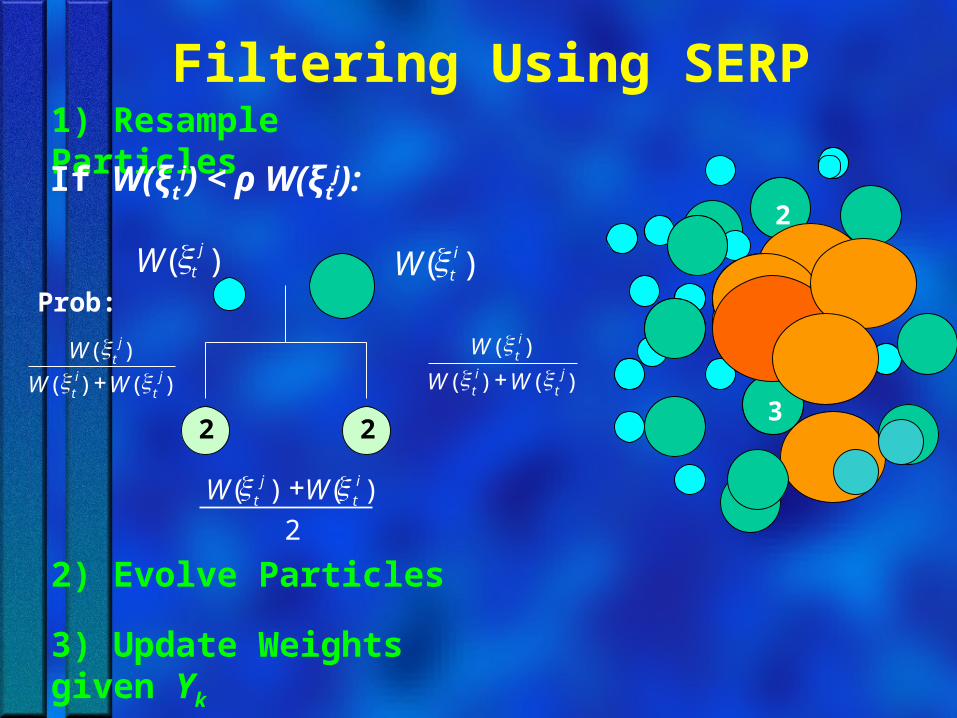
1) Resample Particles
2) Evolve Particles
3) Update Weights given Yk
If W(ξti) < ρ W(ξt
j):
)()(
)(jt
it
jt
WW
W
Prob:
22
)()(
)(jt
it
it
WW
W
)( j
tW )( i
tW
2
)()( it
jt WW
Filtering Using SERP
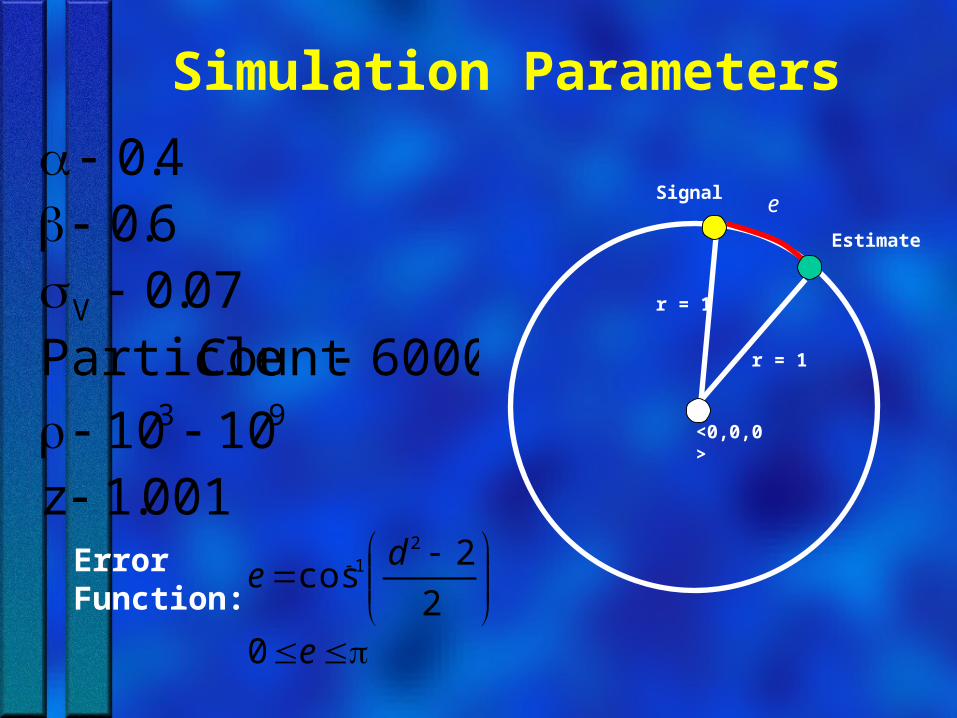
Simulation Parameters
001.1z1010
600007.0
6.04.0
93
V
Count Particle
e
de
02
2cos
21Error
Function:
<0,0,0>
r = 1
r = 1
eSignal
Estimate
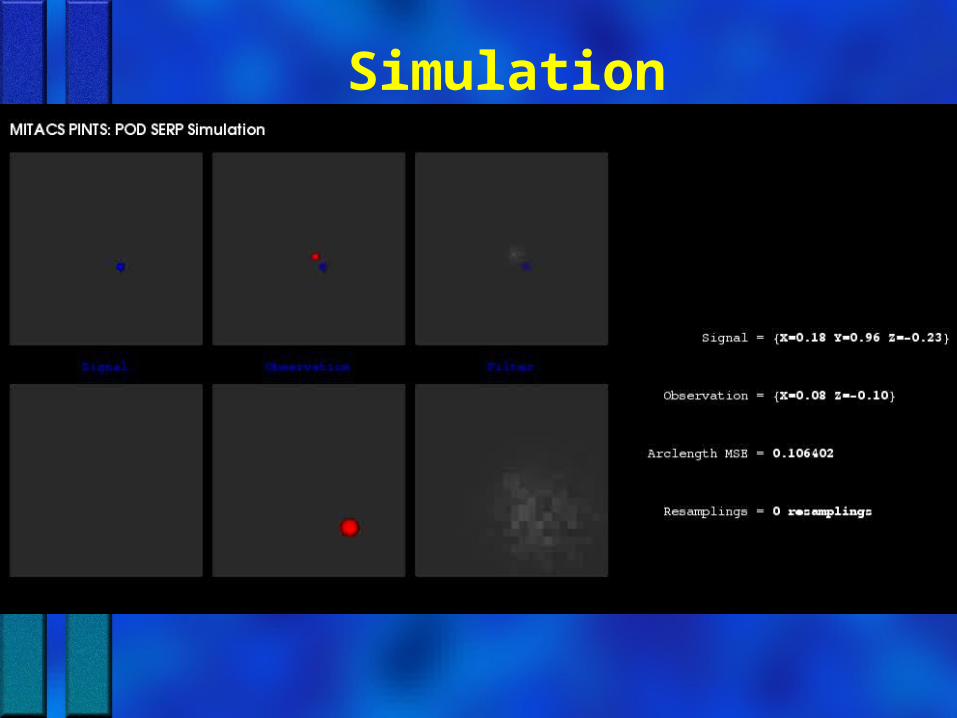
Simulation
Future Directions
- Workable explicit solution-Eliminate approximation errors in SERP particle evolve
- Use IDEX as filter
- More realistic manifolds- Cantilever equations
- Enhance signal motion- Damped Harmonic Motion
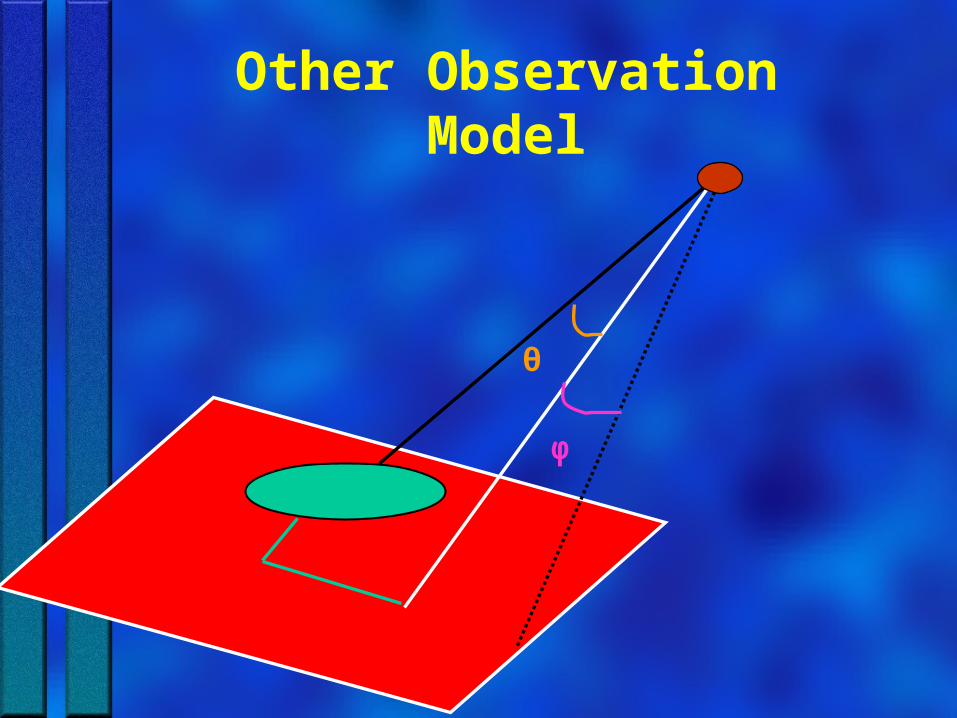
θ
φ
Other Observation Model
Filtering with IDEX
• Goal: prove explicit solutions exist
• IDEX provides:
• Faster computation
• No inherent approximation error
Background
• From Kouritzin and Remillard (2000):
txt
xt
xt dWtXdttXhdX ),(),(
t
uxx
t dWuUtX0
))(,(
m are 1-step nilpotent, h constraint holds
Problem Description
• Two dimensional manifold in three space
x
tYtYtXx
xxt
)0,0,0(
))(),(,( 21
t
sxs
t xs
xt dWXdsXhxX
00)()(
Conditions
t
si
i
i
t
s
dWsYsUtY
dWsUtY
0
2
1
1,2
2
0
1
1
)()()(
)()(
abledifferentily continuous ,, 2,21,21 UUU
Equivalency
• By Ito’s formula and martingale theory:
),(),,,(
)(),,,()),,,((
121
2121
2
1
ysAyysx
sAyysxyysx
y
y
)0,0(,,0,
),,,()),,,((21
2121
NyysDx
yysxyysxh s
(1)
Results
• Conjecture: Φ exists iff (2)
mymymm DDhh )()()()( 21
))()((),(
))(()(2
1
1,21
1
sYsUysD
sUsD
ii
i
msm
msm
where
2,1,~,))()(())()(( ~~~~
kmmmmxmmxkxkmmxmmxx
(2)
Sketch of Proof
• Assuming that Φ exists, then (2) is equivalent to two-step nilpotentcy
• Apply chain rule
• Simplify equation
Sketch of Proof Cont.
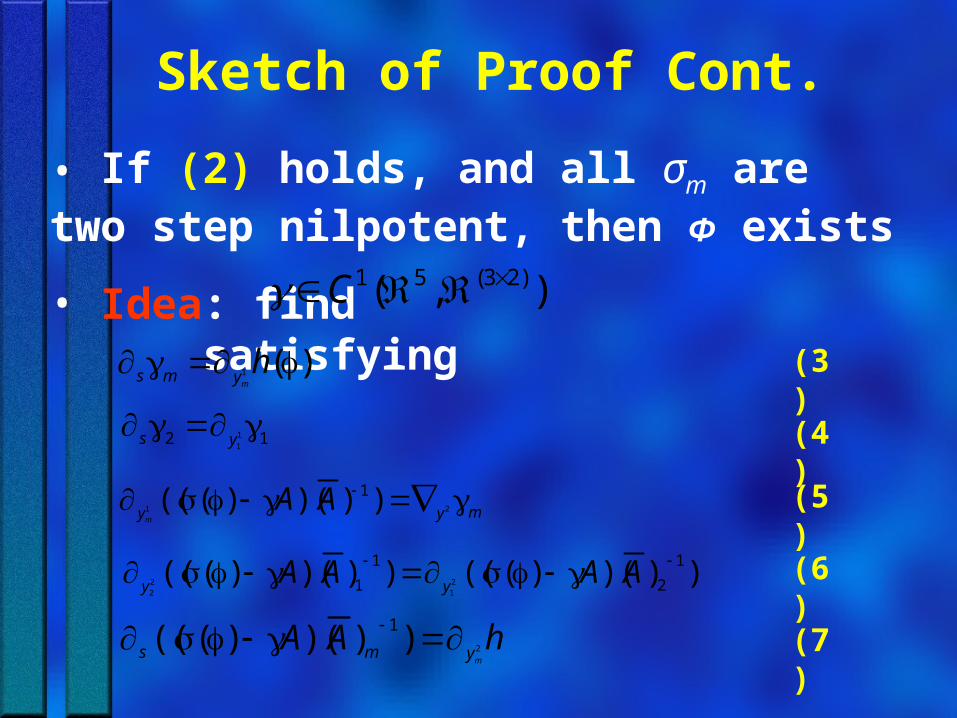
• If (2) holds, and all σm are two step nilpotent, then Φ exists
• Idea: find satisfying),( )23(51 C
hAAmyms 2)))()((( 1
(3)
(4)
(5)
(6)
(7)
)(1 hmyms
myyAA
m
21 )))()((( 1
)))()((()))()((( 1
2
1
1 2
1
2
2
AAAAyy
12 11
ys
Sketch of Proof Cont.
• Let Φ be such that
• Get dΦ is exact by (3-7)
• Future: construct (4-6), show they converge
1y