-
Guide d'exploitationUser's manualBedienungsanleitungGua de
explotacinGuida allimpiego
Altivar 38Telemecanique
Variateur de vitesse pour moteur asynchrones,Variable speed
controllersfor asynchronous motors,Frequenzumrichter
frDrehstrom-Asynchronmotoren,Variadores de velocidad paramotores
asncronos,Variatori di velocit permotori asincroni.
-
2
FR
AN
A
ISE
NG
LIS
HD
EU
TS
CH
ES
PA
O
LIT
AL
IAN
O
Altivar 38
Variateur de vitesse pour moteurs asynchrones Page 2
Speed controller for asynchronous motors Page 66
Umrichter fr Drehstrom-Asynchronmotoren Seite 130
Variador de velocidad para motores asncronos Pgina 194
Variatori di velocit per motori asincroni Pagina 258
-
67
EN
GL
ISH
CAUTIONThe Altivar 38 must be considered as a component: it is
neither a machine nor a device ready for use inaccordance with
European directives (machinery directive and electromagnetic
compatibility directive).It is the responsibility of the end user
to ensure that the machine meets these standards.
The drive must be installed and set up in accordance with both
international and national standards.Bringing the device into
conformity is the responsibility of the systems integrator who must
observe theEMC directive among others within the European
Union.
The specifications contained in this document must be applied in
order to comply with the essentialrequirements of the EMC
directive.
NOTECAUTION
When the drive is powered up, the power components and some of
the control components areconnected to the line supply. It is
extremely dangerous to touch them. The drive cover must be
keptclosed.
After the ALTIVAR has been switched off and the green LED has
gone out, wait for 3 to 10 minutes beforeworking on the equipment.
This is the time required for the capacitors to discharge.
The motor can be stopped during operation by inhibiting run
commands or the speed reference while thedrive remains powered up.
If personnel safety requires prevention of sudden restarts, this
electroniclocking system is not sufficient: fit a cut-off on the
power circuit.
The drive is fitted with safety devices which, in the event of a
fault, can shut down the drive andconsequently the motor. The motor
itself may be stopped by a mechanical blockage. Finally,
voltagevariations, especially line supply failures, can also cause
shutdowns.
If the cause of the shutdown disappears, there is a risk of
restarting which may endanger certainmachines or installations,
especially those which must conform to safety regulations.
In this case the user must take precautions against the
possibility of restarts, in particular by using a lowspeed detector
to cut off power to the drive if the motor performs an unprogrammed
shutdown.
Equipment should be designed in accordance with the
specifications laid down in the IEC standards.
As a rule, the drive power supply must be disconnected before
any operation on either the electrical ormechanical parts of the
installation or machine.
The products and equipment described in this document may be
changed or modified at any time, eitherfrom a technical point of
view or in the way they are operated. Their description can in no
way beconsidered contractual.
-
68
EN
GL
ISH
Contents
Preliminary Recommendations
_____________________________________________________ 68Selecting a
Drive with Heatsink
_____________________________________________________ 69Available
Torque
________________________________________________________________
70Technical Specifications
___________________________________________________________
71Dimensions - Fan output
__________________________________________________________
73Mounting and Temperature Conditions
_______________________________________________ 74Removing the IP
41 Protective Blanking Cover
_________________________________________ 76Mounting in a
Wall-fixing or Floor-standing Enclosure
____________________________________ 77Access to Terminals - Power
Terminals _______________________________________________ 78Control
Terminals
________________________________________________________________
80Electromagnetic Compatibility - Wiring
_______________________________________________ 81Wiring
Recommendations, Use
_____________________________________________________ 83Connection
Diagrams
_____________________________________________________________
84Keypad operation
________________________________________________________________
87Access to Menus
________________________________________________________________
88Access to Menus - Programming Principle
____________________________________________ 89Macro-Configurations
_____________________________________________________________
90Display Menu
___________________________________________________________________
91Adjust Menu
____________________________________________________________________
92Drive Menu
_____________________________________________________________________
95Control Menu
___________________________________________________________________
98I/O Menu
_____________________________________________________________________
101Configurable I/O Application Functions
______________________________________________ 105Fault Menu
____________________________________________________________________
114Files Menu
____________________________________________________________________
116Communication and Application Menus / Return to factory settings
________________________ 118Operation - Maintenance - Spares and
Repairs ________________________________________ 119Faults - causes
- remedies ________________________________________________________
120Record of configuration and adjustments
_____________________________________________ 123Summary of menus
_____________________________________________________________
125Index
________________________________________________________________________
128
-
69
EN
GL
ISH
Preliminary Recommendations
AcceptanceCheck that the drive reference printed on the label is
the same as that on the delivery notecorresponding to the purchase
order.
Remove the Altivar 38 from its packaging and check that it has
not been damaged in transit.
Handling and storageTo ensure the drive is protected before
installation,
Handling on installationThe Altivar 38 range comprises 9 sizes
of device, with v
Small drives can be removed from their packaging and
A hoist must be used with large drives; for this reason
thedescribed below must be observed: handle and store the device in
its packaging.
arious weights and dimensions.
installed without a handling device.
y are supplied with 4 handling "lugs". The precautions
45
max.
-
Selecting a Drive with Heatsink
Three-phase supply voltage: 380...460 V 50/60 Hz
(4) Current values given with an additional line choke.(5) These
power levels are for a maximum switching fre
continuous operation. Switching frequencies are detUsing the
ATV38 with a higher switching frequency: For continuous operation
derate by one power ratiATV38HU18N4 for 0.37 kW ATV38HD12N4 for 5.
If no power derating is applied, do not exceed the Cumulative
running time 36 s maximum per 60 s cyc
(6) For 60 seconds.(7) These power levels are given for the
maximum perm
or 4 kHz, depending on the rating).(8) For ATV38HU18N4 to D79N4:
the Altivar 38 is fitted
For ATV38HD25N4(X) to D79N4(X): add X to the refilter.For
ATV38HC10N4X to C33N4X: the Altivar 38 is nfilters are
available.
Line current at 400 V
Isc prospective
line
Motor power
(2)Nominal
current (In)Max. transient
current(3)
Power dissipatedat nominal load (4)
Reference
(5)Weight
A kA kW A A3.1 5 0.75 2.1 2.5.4 5 1.5 3.7 4.7.3 5 2.2 5.4 610 5
3 7.1 7.
12.3 5 4 9.5 1016.3 5 5.5 11.8 124.3 22 7.5 16 1733.5 22 11 22
2443.2 22 15 30 342 22 18.5 37 449 22 22 44 465 22 30 60 679 22 37
72 895 22 45 85 9
118 22 55 105 11158 22 75 138 15
156 (1) 22 90 173 19191 (1) 22 110 211 23229 (1) 22 132 253
27279 (1) 22 160 300 33347 (1) 22 200 370 40384 (1) 22 220 407
44433 (1) 22 250 450 49485 (1) 22 280 503 55536 (1) 22 315 564
6270
EN
GL
ISH
quency of 2 or 4 kHz, depending on the rating, and ailed in the
section on "Technical Specifications".
ng, for example:5 kW.following operating conditions:le (load
factor 60%).
issible switching frequency in continuous operation (2 with an
integral EMC filter.ference to receive an Altivar 38 without
integral EMCot fitted with an integral EMC filter. Optional
external
W kg3 55 ATV38HU18N4 3.81 65 ATV38HU29N4 3.8
105 ATV38HU41N4 3.88 145 ATV38HU54N4 6.9.5 180 ATV38HU72N4 6.93
220 ATV38HU90N4 6.9.6 230 ATV38HD12N4 13.2 340 ATV38HD16N4 133 410
ATV38HD23N4 151 670 ATV38HD25N4(X) 349 750 ATV38HD28N4(X) 346 925
ATV38HD33N4(X) 340 1040 ATV38HD46N4(X) 344 1045 ATV38HD54N4(X) 576
1265 ATV38HD64N4(X) 572 1730 ATV38HD79N4(X) 570 2250 ATV38HC10N4X
492 2750 ATV38HC13N4X 758 3300 ATV38HC15N4X 770 4000 ATV38HC19N4X
777 5000 ATV38HC23N4X 1598 5500 ATV38HC25N4X 1665 6250 ATV38HC28N4X
1683 7000 ATV38HC31N4X 1680 7875 ATV38HC33N4X 168
-
71
EN
GL
ISH
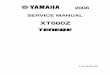
Available Torque
Torque characteristics: Variable torque applications:
1 Self-cooled motor: permanent useful torque2 Force-cooled
motor: permanent useful torque3 Transient overtorque for max. 60
seconds.4 Torque at overspeed with constant power
Available overtorque: Variable torque applications:
110% of the nominal motor torque for 60 seconds.
Continuous operationFor self-cooled motors, cooling is linked to
the motor sphalf the nominal speed.
Overspeed operationAs the voltage can no longer change with the
frequencyreduction in torque. Check with the manufacturer that
th
Note: With a special motor, the nominal and maximum using the
operator terminal or PowerSuite tools.
0
N (H
0.5
25
30
50
60
5
3
2
2
1
1
1
0.95
T/Tn
1.1
75
90
100
120
4eed. Derating therefore occurs at speeds of less than
, induction in the motor is reduced which results in ae motor
can operate at overspeed.
frequencies can be adjusted between 10 and 500 Hz
z)
-
Technical Specifications
Environment
ATV38 HU18N4 to ATV38HD23N4 ATV38 HD25N4(X) to
ATV38HC33N4XDegree of protection
IP21 and IP41 on upper part (conforming to EN 50178)
ATV38HD25N4(X) to ATV38HD79N4(X) drives:
Vibration resistance
Conforming to IEC 68-2-6:1.5 mm peak from 2 to 13 Hz1 gn from 13
to 200 Hz
Maximum ambient pollution
ATV38HU18N4 to ATV38 HD23drives:Degree 2 conforming to IEC 664EN
50718
Maximum relative humidity
93% without condensation or dr
Ambient temperature around the unit
Storage: -25 C to +65 C
Operation: ATV38HU18N4 to ATV38HU90drives: -10 C to +50 C
without dera up to +60 C with current dera
2.2% per C above 50 C
ATV38HD12N4 to ATV38HD23Ndrives: -10 C to +40 C without dera up
to +50 C with current dera
2.2% per C above 40 C
Maximum operating altitude
1000 m without derating (above
Operating position Vertical72
EN
GL
ISH
IP21 and IP41 on upper part (conforming to EN 50178)ATV38HC10N4X
to ATV38HC33N4X drives:- IP00 on underside (requires addition of
protection against direct contact by personnel)- IP20 on other
sidesATV38HD25N4(X) to ATV38HD79N4(X) drives:Conforming to IEC
68-2-6:1.5 mm peak from 2 to 13 Hz1 gn from 13 to 200 Hz
ATV38HC10N4X to ATV38HC33N4X drives:0.6 gn from 10 to 55 Hz
N4
-1 and
ATV38HD25N4(X) to ATV38HD79N4(X) drives:- Degree 3 conforming to
UL508CATV38HC10N4X to ATV38 HC33N4X drives:Degree 2 conforming to
IEC 664-1 and EN 50718
ipping water, conforming to IEC 68-2-3
N4
tingting of
4
tingting of
Storage: -25 C to +65 C
Operation:ATV38HD25N4(X) to ATV38HD79N4(X)drives: -10 C to +40 C
without derating up to +60 C with the ventilation kit
with current derating of 2.2% per C above 40 C
ATV38HC10N4X to ATV38HC33N4X drives: -10 C to +40 C without
derating up to +50 C with current derating of
2.2% per C above 40 C this, derate the current by 1% per
additional 100 m)
-
73
EN
GL
ISH
Technical Specifications
Electrical characteristicsPower supply
Voltage 380 V - 10% to 460 V + 10% 3-phaseFrequency 50/60 Hz
5%
Output voltage Maximum voltage equal to line supply
voltageElectrical isolation Electrical isolation betw
supplies)Output frequency range 0.1 to 500 HzSwitching frequency
Configurable:
without derating:0.5 - 1 - 2 - 4 kHz for0.5 - 1 - 2 kHz for
AT
without derating withor with derating by o8 - 12 - 16 kHz for A8
- 12 kHz for ATV384 - 8 kHz for ATV38H4 kHz for ATV38HC1
Speed range 1 to 10Braking torque 30% of nominal motor t
power ratingsTransient overtorque 110% of nominal
motorProtection and safety features of drive
Short-circuit protectio- between output ph- between output ph-
on internal supply
Thermal protection ag Supply undervoltage Loss of input phase
s
phase drives)Motor protection Thermal protection in
taking speed into accMotor thermal state sbe modified (via the
oPC software), depend
Protection against mo Protection via PTC preen power and control
(inputs, outputs, power
ATV38HU18N4 to D46N4(X) drivesV38HD54N4(X) to C33N4X drives
intermittent operating cyclene power rating in continuous
operation:TV38HU18N4 to D23N4 drivesHD25N4(X) to D46N4(X)
drivesD54N4(X) to D79N4(X) drives0N4X to C33N4X drives
orque without braking resistor (typical value) for low
torque (typical values to 10%) for 60 secondsn:asesases and
earthoutputsainst overheating and overcurrents
and overvoltage safety circuitsafety circuit (avoids
single-phase operation, on all 3-
tegrated in drive via continuous calculation of I2t ountaved
when the drive is switched off. This function can perator terminal
or programming terminal or via the ing on the type of motor
coolingtor phase breaksobes with option card
-
Dimensions - Fan output
Dimensions
Fan output
ATV38H a b cU18N4, U29N4, U41N4 150 230 184U54N4, U72N4, U90N4
175 286 184D12N4, D16N4 230 325 210D23N4 230 415 210D25N4(X),
D28N4(X), D33N4(X), D46N4(X)
240 550 283
D54N4(X), D64N4(X), D79N4(X) 350 650 304C10N4X 370 630
360C13N4X, C15N4X, C19N4X 480 680 400C23N4X, C25N4X, C28N4X,
C31N4X,C33N4X
660 950 440
ATV38HU18N4ATV38HU29N4, U41N4, U54N4ATV38HU72N4, U90N4,
D12N4,D16N4, D23N4ATV38HD25N4(X), HD28N4(X), D33N4(X),
D46N4(X)ATV38HD54N4(X), D64N4(X), D79N4(X)ATV38HC10N4XATV38HC13N4X,
C15N4X, C19N4XATV38HC23N4X, C25N4X, C28N4X, C31N4X,C33N4X
c
b
a
G
1
= =
H==
View A
The EMATV38HUequipoteheatsink above.74
EN
GL
ISH
EMC mounting plateG H 1 b 2133 210 5 64.5 4155 270 5.5 64.5 4200
310 5.5 76 4200 400 5.5 76 4205 530 7 80 5
300 619 9 110 5317.5 609 12426 652 12598 920 15
not cooled36 m3/hour72 m3/hour292 m3/hour492 m3/hour600
m3/hour900 m3/hour900 m3/hour
3 screws
Db
2 tapped holes for fixing the EMCclamp.
C mounting plate is supplied with clamps for18N4 to D79N4(X)
drives. Fix the EMC
ntiality mounting plate to the holes in the ATV38using the
screws supplied, as shown in the drawings
A
-
75
EN
GL
ISH
Mounting and Temperature Conditions
Install the unit vertically to within +/-10 .Do not place it
close to heating elements.Leave sufficient free space to ensure
that the air required for cooling purposes can circulate from the
bottomto the top of the unit.
ATV38HU18N4 to D23N4
Free space
ATV38HU18N4 to U90N4:
ATV38HD12N4 to D23N4:
From - 10 C to 40 C: d 50 mm: no special precautio
d = 0: remove the protective blan(the degree of protection is
then
From 40 C to 50 C: d 50 mm: remove the protectioverleaf (the
degree of protectio
d = 0: add control ventilation kit V
From 50 C to 60 C: d 50 mm: add control ventilatioDerate the
operating current by 2
From - 10 C to 40 C: d 50 mm: no special precautio
d = 0: remove the protective blan(the degree of protection is
then
From 40 C to 50 C: d 50 mm: remove the protectioverleaf (the
degree of protectioDerate the current by 2.2% per
d = 0: add control ventilation kit Vby 2.2% per C over 40 C.
d d
50
50 in front of unit: 10 mm minimum.
ns.
king cover from the top of the drive as shown overleafIP
20).
ve blanking cover from the top of the drive as shownn is then IP
20).
W3A5882 (see ATV38 catalogue).
n kit VW3A5882 (see ATV38 catalogue)..2% per C over 50 C.
ns.
king cover from the top of the drive as shown overleafIP
20).
ve blanking cover from the top of the drive as shownn is then IP
20).C over 40 C.
W3A5882 (see ATV38 catalogue). Derate the current
-
Mounting and Temperature Conditions
ATV38HD25N4(X) to D79N4(X)
Free space in front of unit: 50 mm minimum. From - 10 C to 40 C:
no special precautions. From 40 C to 60 C: add control ventilation
kit VW3A588 (see ATV38 cata
ATV38HC10N4X to C23N4X
Free spac From - 10 Up to 50 above 40
50 50
100
100
50 50
200
20076
EN
GL
ISH
logue). Derate the current by 2.2% per C over 40 C.
e in front of unit: 50 mm minimum. C to 40 C: no special
precautions.C, derating the operating current by 2.2% for each
CC.
-
77
EN
GL
ISH
Removing the IP 41 Protective Blanking Cover
ATV38HU18N4 to U90N4
ATV38HD12N4 to D23N4
ATV38HD25N4(X) to D79N4(X)
-
Mounting in a Wall-fixing or Floor-standing Enclosure
Observe the mounting recommendations on the previous page.
To ensure proper air circulation in the drive:
- Fit ventilation grilles- Ensure that ventilation is adequate:
if not, install
forced ventilation with a filter- Use special IP 54 filters
Dust and damp proof metal walenclosure (IP 54 degree of
protection)The drive must be mounted in a dust and damp
procorrosive gases, high humidity with risk of condensation
To avoid hot spots in the drive, add a fan to circulate theATV38
catalogue).This enables the drive to be used in an enclosure
where
Calculating the size of the enclosureMaximum thermal resistance
Rth (C/W) :
Power dissipated by the drive: see section Selecting a dAdd the
power dissipated by the other equipment comp
Useful heat dissipation surface of enclosure S (m2):(sides + top
+ front panel if wall-mounted)
Caution: Do not use insulated enclosures, as they hav
Rth = - eP
= maximum temperature insidee = maximum external temperatP =
total power dissipated in the
S = KRth K = enclosure thermal resistance per m
For metal enclosure: K = 0.12 with internal fanK = 0.15 without
fan78
EN
GL
ISH
l-fixing or floor-standing
of casing in certain environmental conditions: dust, and
dripping water, splashing liquid, etc.
air inside the enclosure, reference VW3A5882 (see
the maximum internal temperature can reach 60 C.
rive.onents.
e a poor level of conductivity.
enclosure in Cure in C enclosure in W
2
-
79
EN
GL
ISH
Access to Terminals - Power Terminals
Access to terminalsSwitch off the drive.
ATV38HU18N4 to ATV38HD79N4(X):- control terminals: unlock and
open the hinged cover- power terminals: accessible on the underside
of the Altivar 38
Location of terminals: on the underside of the Altivar.
ATV38HC10N4X to HC33N4X:- the control and power terminals can be
accessed
Power terminalsTerminal characteristicsAltivar ATV38H
Terminals
U18N4, U29N4, U41N4 all terminalsU54N4, U72N4, U90N4 all
terminalsD12N4, D16N4, D23N4 all terminalsD25N4(X), D28N4(X) L1,
L2, L3, U, V, W,
D33N4(X), D46N4(X) L1, L2, L3, U, V, W,
D54N4(X), D64N4(X), D79N4(X)
L1, L2, L3, U, V, W,
C10N4Xother terminals
C13N4Xother terminals
C15N4X Aother terminals A
C19N4X Aother terminals A
C23N4X Aother terminals A
1
2
31 Control2 Power3 Terminal for connection of a protective
conductor,
10 mm2 cross-section conforming to EN50178 (earth leakage
current)
by removing the front cover
Maximum connection capacity Tightening torque in NmAWG mm2
AWG 8 6 0.75AWG 8 6 0.75AWG 6 10 2AWG 4 16 3
AWG 2 35 4
AWG 2/0 70 10
AWG 3/0 60 8AWG 3/0 100 16AWG 4/0 60 16AWG 4/0 100 16WG 1/0 x 2
60 16WG 1/0 x 2 100 16WG 3/0 x 2 100 16WG 3/0 x 2 150 16WG 4/0 x 2
100 32WG 4/0 x 2 200 32
-
Power Terminals
Terminal layout
Terminal functions
Altivar ATV38H Terminals Maximum connection capacity Tightening
torque in NmAWG mm2
C25N4X AWG 2/0 x 3 - AWG 300 x 2 100 32other terminals AWG 2/0 x
3 - AWG 300 x 2 200 32
C28N4X AWG 3/0 x 3 - AWG 350 x 2 150 32other terminals AWG 3/0 x
3 - AW
C31N4X, AWG 4/0 x 3 - AWother terminals AWG 4/0 x 3 - AW
C33N4X AWG 250 x 3 - AWother terminals AWG 250 x 3 - AW
Terminals Function
Altivar ground termL1L2L3
Power supply
+
DC bus outputs
PAPB
Not used
UVW
Outputs to motor
PA PB
L1 L2 L3 U V W
+ - PA
PB
L1 L2 L3 U V W
+ +
-
U V
WL1 L2 L3
L1 L3L2
+ U
V W-
L1 L2 L3
++ U
V W-
Do not use80
EN
GL
ISH
ATV38HU18N4 to D23N4
ATV38HD25N4(X) and D79N4(X)
ATV38HC10N4X
ATV38HC13N4X to C19N4X
ATV38HC23N4X to C33N4X
G 350 x 2 150 x 2 32G 400 x 2 150 32G 400 x 2 150 x 2 32G 500 x
2 150 32G 500 x 2 150 x 2 32
For Altivar ATV38Hinal All ratings
All ratings
All ratingsexcept HU18N4 to HD23N4ATV38HU18N4 to HD79N4(X)
All ratings
-
81
EN
GL
ISH
Control Terminals
Terminal characteristics: Shielding connection terminal: for
metal clamp or tag connector 2 removable terminals, one for the
relay contacts, the other for the low-level I/O Maximum connection
capacity : 1.5 mm2 - AWG 14 Max. tightening torque: 0.4 Nm
Terminal layout:
Terminal functionsTerminal Function Elect
R1AR1BR1C
Common point C/O contact (R1C) of R1 fault relay
Min. 10 Max.(cos 1.5R2AR2C
N/O contact of R2 programmable relay
AO1 Analog current output X-Y mFactoimpe
COM Common for logic and analog inputs
AI1 Analog voltage input Analimpe
+10 Power supply for reference potentiometer 1 to 10 k
+10 short
AI2 Analog current input X-Y mFactoimpe
LI1LI2LI3LI4
Logic inputs Progimpe+ 24State
+ 24 Power supply for inputs + 24min. Max.
R1A
R1B
R1C
R2A
R2C
A01AO1
COM
AI1
+10
AI2
LI1
Control cardrical characteristics
switching capacitymA for 24 Va switching capacity on inductive
load 0.4 and L/R 7 ms): A for 250 Vc and 30 Va
A analog output, where X and Y can be configuredry setting 0 -
20 mA
dance 500
og input 0 + 10 Vdance 30 kV (- 0, + 10%) 10 mA max.-circuit and
overload protectionA analog input, where X and Y can be
configuredry setting 4 - 20 mA
dance 100 rammable logic inputsdance 3.5 k V power supply (max.
30 V) 0 if < 5 V, state 1 if > 11 V
V protected against short-circuits and overloads, 18 V, max. 30
V current 200 mA
LI2
LI3
LI4
+24
-
Electromagnetic Compatibility - Wiring
Altivar 38 with integral EMC filter ATV38HU18N4 to
HD79N4Principle Grounds between drive, motor and cable shielding
must have "high frequency" equipotentiality. Use shielded cables
with shielding connected to the ground at both ends of the motor
cable, braking resistor
(if fitted) and control-signalling cables. Conduit or metal
ducting can be used for part of the shielding length provided that
there is no break in continuity.
Ensure maximum separation between the power sup
Installation diagram
1 Sheet steel machine ground supplied with the drive, 2 Altivar
38.3 Non-shielded power supply wires or cable. 4 Non-shielded wires
for the output of the safety relay c5 Fix and ground the shielding
of cables 6, 7 and 8 as
- strip the cable to expose the shielding- use the clamps
supplied to fix the stripped part of
The shielding must be clamped tightly enough to t6 Shielded
cable for motor connection with shielding co
The shielding must be continuous and intermediate t7 Shielded
cable for connecting the control/signalling w
For applications requiring several conductors, use smThe
shielding must be connected to ground at both eintermediate
terminals must be in EMC shielded met
8 Shielded cable for connecting braking resistor (if fittedends.
The shielding must be continuous and intermed
Note: If using an additional input filter, it should be
mounted
supply via an unshielded cable. Link 3 to the drive is The HF
equipotential ground connection between the
need to connect the PE protective conductors (green
4
2
8
382
EN
GL
ISH
ply cable (line supply) and the motor cable.
to be fitted as indicated on the diagram.
ontacts. close as possible to the drive:
the shielding to the metal plate 1he metal plate to ensure good
contact.nnected to ground at both ends.
erminals must be in EMC shielded metal boxes.iring.all
cross-sections (0.5 mm2).
nds. The shielding must be continuous and al boxes.). The
shielding must be connected to ground at both iate terminals must
be in EMC shielded metal boxes.
behind the drive and connected directly to the line then via the
filter output cable. drive, motor and cable shielding does not
remove the -yellow) to the appropriate terminals on each unit.
6
7
5
1
-
83
EN
GL
ISH
Electromagnetic Compatibility - Wiring
Altivar 38 without integral EMC filter ATV38HC10N4X to
HC33N4X
Line chokes are compulsory if the line supply prospective
short-circuit current is less than 22 kA. These chokescan be used
to provide improved protection against overvoltages on the line
supply and to reduce harmonicdistortion of the current produced by
the drive. The chok
Principle Grounds between drive, motor and cable shielding m Use
shielded cables with shielding connected to the
signalling cables. Conduit or metal ducting can be usis no break
in continuity.
Ensure maximum separation between the power sup
Power wiringThe power wiring should consist of cables with 4
condupossible to the PE cable. Take care to route the motor cThe
power supply cables are not shielded. If a radio interdrive should
be at the same potential with low-impedanplate with anti-corrosion
treatment/machine ground wirinthe drive.If the environment is
sensitive to radiated radio interferenside, fix and connect the
shielding to the machine groundcable shielding is to limit their
radio frequency radiation. Teach end of the shielding in accordance
with establisheprotective material (copper or steel) is less
important thalternative is to use a metal cable duct with good
conduNote: when using a cable with a protective sleeve (NYCit must
be connected correctly to both the drive and the
Control wiring
Shielding c
Cable gripby the clipes are used to limit the line current.
ust have "high frequency" equipotentiality.ground at both ends
of the motor cable, and control-ed for part of the shielding length
provided that there
ply cable (line supply) and the motor cable.
ctors or individual cables maintained as close as ables well
away from the power supply cables.ference filter is used, the
grounds for the filter and the ce links at high frequency (fixed to
unpainted metal g). The filter should be fitted as close as
possible to
ce, the motor cables should be shielded. On the drive with
rustproof clamps. The main function of the motor herefore, use
4-pole cables for the motor, connecting
d practice for High Frequency wiring. The type of an the quality
of the connection at both ends. An ctivity and no break in
continuity.Y type) which fulfils the dual function of PE + screen,
motor (its radiation efficiency is reduced).
lamp
. Check that the cable follows the path indicateds
-
Wiring Recommendations, Use
Wiring recommendationsPowerObserve the cable cross-sectional
areas recommended in the standards.
The drive must be earthed to conform with the regulations
concerning high leakage currents (over 3.5 mA). Donot use a
residual current device for upstream protecgenerated by leakage
currents. If the installation involveearthed separately. If
necessary, fit a line choke (consuKeep the power cables separate
from circuits in the measuring apparatus, video, telephone).
ControlKeep the control circuits away from the power cables.
Fousing shielded twisted cables with a pitch of between 25
Recommendations for useWith power switching via line
contactor:
- Avoid operating contactor KM1 frequeninputs LI1 to LI4 to
control the drive
- these steps are essential in the event of of less than 60
seconds for ATV38HU1of less than 180 seconds for ATV38HC
If safety standards necessitate isolation of the moto"downstream
contactor control" function (consult the pro
Fault relay, unlockingThe fault relay is energized when the
drive is poweredcommon point.
The drive is unlocked after a fault by:
powering down the drive until both the display and in
automatically or remotely via logic input: consult the84
EN
GL
ISH
tion on account of the DC elements which may bes several drives
on the same line, each drive must belt the catalogue).installation
with low-level signals (detectors, PLCs,
r control and speed reference circuits, we recommend and 50 mm
connecting the shielding to each end.
tly (premature ageing of the filter capacitors). Use
cycles:8N4 to HD79N4(X)10N4X to ATV38HC33N4X
r, fit a contactor on the drive output and use thegramming
manual).
up and is not faulty. It has one C/O contact at the
dicator lamps go out, then powering up again programming
manual
-
85
EN
GL
ISH
Connection Diagrams
3-phase power supply
(1) ATV38HC10N4X to C33N4X: Line choke compulsorATV38HU18N4 to
D23N4: Line choke if necessary.
(2) Fault relay contacts for remote signalling of drive sta(3)
Internal + 24 V. If an external + 24 V supply is used, c
do not use the + 24 terminal on the drive, and conneexternal
supply.
(4) R2 reassignable relay.Note:Fit interference suppressors to
all inductive circuits nearelays, contactors, solenoid valves,
fluorescent lighting,
Components which can be used in association with
U V W COM
AO1
L1
U1
W1
V1
M
3c
L2
L3
R1A
R1C
R1B
LI1
LI2
LI3
X - Y mA
(2)
(1)
Q1
12
34
56
A1
KM1
Without
line
contactor
or
With
line
contactor
12
34
56
Q2
1 2
3 4
5
RMotorfrequencyy.
tus.onnect the 0 V from that source to the COM terminal, ct the
common of the LI inputs to the + 24 V of the
r the drive or connected in the same circuit, such as etc.
the Altivar: see catalogue.
+10
AI1
LI4
+24
AI2
(3)
X - Y mA
R2A
R2C
(4)
KM1
A2A1
S1
S2
13R1CR1A 14
KM1
T1
Q3
1 2
Q2
6
A1
eference potentiometer
-
Connection diagrams
Diagram with downstream contactor for ATV38HU18N4 to D23N4.The
shaded part should be added to the various diagram types.
Use the "downstream contactor control" function with reof an I/O
extension card. Consult the programming manual.
Note:Fit interference suppressors to all inductive circuits
nearelays, contactors, solenoid valves, fluorescent lighting,
Components which can be used in association with
U V W
U1
W1
V1
M
3c
A1
A2
A1
R2C
KM2
12
34
56
R2A
COM
(0V)
+2486
EN
GL
ISH
lay R2, or logic output LO (a 24 V) with the addition
r the drive or connected in the same circuit, such as etc.
the Altivar: see catalogue.
-
87
EN
GL
ISH
Connection Diagrams
Diagram with downstream contactor for ATV38HD25N4(X) to
C33N4X.The shaded part should be added to the 3-phase power supply
diagram.
Use the "downstream contactor control" function with reusing an
I/O extension card.Consult the programming manual.
Note: Fit interference suppressors to all inductive circuitas
relays, contactors, solenoid valves, fluorescent lighti
Components which can be used in association with
24 V external supply for supplying logic in
U V W
U1
W1
V1
M
3c
A1
A1
A2
R2C
KM2
12
34
56
R2A
Q1
12
34
56
T1
Q2
3 4
Q3
1
1 2
Q2
5 6
LI
LI
LI
LI
+24
COM
0V
+24V
A1lay R2, or logic output LO (a24V) switching the coil
s near the drive or connected in the same circuit, suchng,
etc.
the Altivar: see catalogue.
puts
2
-
Keypad operation
Use the display module delivered with the(see label on the rear
view).
Front panel Use of keys and meaning of displays Flashing:
indicates the selected direction of rotationSteady: indicates
the direction of motor rotation
LOC IndicatPROG Appea
Flashinindicat
4-character dispdisplays numerOne line of 16 cdisplays messa
Scroll through menus or parameters andadjust a value.Return to
the previous menu or abort thecurrent adjustment and return to
theoriginal value.Select a menu, confirm and save aselection or
adjustment.
Rear viewNotes: The operator tepower on. If thethe terminal is
eAccess locking
- position
- position
- positionConnector:
- for direct c- for remote
provided inRemote mountUse the kit, connectors, theinstallation
guid
LOC PROG
ESC
ENT
RUN
FWD
REV
STOP
RESET
ESC
ENT88
EN
GL
ISH
ATV38 or a version 5.1 or above display module
es control via the terminalrs in setup and programming
modeg:
es that a value has been modified but not savedlay:
ic values and codesharacters: ges in plain text
Reverses the direction of rotation.
Command to start the motor running.
Command to stop the motor or reset thefault. The keys "STOP"
function can beinhibited via the program ("CONTROL"menu).
rminal may be connected and disconnected with the terminal is
disconnected when control of the drive vianabled, the drive locks
in fault mode SLF. switch:
: Adjustment and configuration not accessible : Adjustment
accessible : Adjustment and configuration accessible
onnection of the terminal to the drive operation, the terminal
can be connected via a cable the VW3A58103 kiting of the terminal:
reference VW3A58103, comprising 1 cable with kit for mounting on an
enclosure door and thee.
If control via the terminal is active:
FWD
REV
RUN
STOP
RESET
-
89
EN
GL
ISH
Access to Menus
The number of menus which can be accessed depends on the
position of the access locking switch.Each menu is made up of a
number of parameters.
CAUTION: If an access code has already been prograthese may not
even be visible. In this case, see the sectaccess code.
1stpower-up
Subsequentpower-ups
Only accessible if the "application" or "communication" card is
installed
Identification: display of the drive power and voltage
Language: French, English, German, Spanish, Italian
Display: display of electrical values, operation or fault
Adjust: configuration of parameters which can be accessed while
the motor is rotating
Drive: motor-drive configuration
Control: configuration of drive control: terminal strip,
operator terminal, RS485
I/O: configuration of the I/O assignment
Faults: configuration of the behaviour of the motor-drive in the
event of a fault, and the protection devices
Files: saving and restoring the configuration or return to
factory settings
access:
Macro-config: variable torque (factory setting)If an
input/output has been reassigned,CCCCuuuuSSSS: Customised is
displayedmmed, it may be impossible to modify some menus;ion
entitled FILES menu explaining how to enter the
ESC
LANGUAGELnG
MACRO-CONFIGCFG
15 kW 380/460 VrEF
1-DISPLAY
SUP
2-ADJUSTSEt
3-DRIVE
drC
4-CONTROL
CtL
5-I/OI-O
6-FAULT
FLt
7-FILES
FLS
8-COMMUNICATIONSL
8-APPLICATIONAPP
or
or
-
Access to Menus - Programming Principle
Language:This menu can be accessed whatever position the access
switch is in, and can be modified in stop or run mode.
Example :
Possible selections: English (factory setting), French, G
Programming principle:The principle is always the same, with 1
or 2 levels:
1 level: see the language example above. 2 levels: see the
acceleration ramp example below.
ENT
LANGUAGELnG
ItalianoL
ESC
ENT
Sanew s
Acceleration ACC
2.ADJUST
SEt
ESC
ENT
ESC90
EN
GL
ISH
erman, Spanish, Italian.
EnglishLnG
ItalianoLnG
nGEnglishLnG
ESC
ve theelection
Return to previously saved selection
ENT
s Acceleration s3.0
Acceleration s3.1
Acceleration s3.1
Acceleration s3.0
ENT ESC
Increase (or Decrease)
Save thenew value Return to previously
saved value
-
91
EN
GL
ISH
Macro-Configurations
This parameter can always be displayed and indicates whether an
input/output has been reassigned.Factory macro-configuration =
Variable torque
Customizing the configuration:The drive configuration can be
customized by changing the I/O assignment in the I/O menu which can
beaccessed in programming mode (access switch in position ).This
customization modifies the displayed macro-config
display of
I/O assignment in variable torque macro-c
Logic input LI1 forwardLogic input LI2 reverseLogic input LI3
Fault resetLogic input LI4 Not assignedAnalog input AI1 motor
frequencyAnalog input AI2 summed ref.Relay R1 drive faultRelay R2
drive runningAnalog output AO1 motor frequency
The assignments with a grey background appe
CUS:CustomisedCFGuration value:
onfiguration
Logic input LI5 ramp switchingLogic input LI6 Not assignedAnalog
input AI3 or summed ref.Inputs A, A+, B, B+ summed ref.Logic output
LO high speed reachedAnalog output AO motor current
ar if an I/O extension card has been installed.
-
Display Menu
Display menu (selection of parameter displayed during operation)
The following parameters can be accessed whatever position the
access switch is in, stop or run mode.Code Function Unit
Drive State
------------
rrrrddddYYYY
rrrrUUUUnnnn
AAAACCCCCCCC
ddddEEEECCCC
CCCCLLLLIIII
ddddCCCCbbbb
nnnnSSSStttt
OOOObbbbrrrr
State of the drive: indicates a fault or the motor operation:rdY
= drive readyrUn = motor in steady state or run command pACC =
acceleratingdEC = deceleratingCLI = current limitdCb = injection
brakingnSt = freewheel stop controlObr = braking by adapting the
deceleration ram
FFFFrrrrHHHH Freq. Ref.
Frequency referencerrrrFFFFrrrr Output Freq.
Output frequency applied to the motorSSSSPPPPdddd Motor
Speed
Motor speed estimated by the driveLLLLCCCCrrrr MotorCurrent
Motor currentUUUUSSSSPPPP Machine Spd.
Machine speed estimated by the drive. This is propbe regulated
in the adjust menu. Displays a valueexample). Caution, if USP
becomes greater than
OOOOPPPPrrrr Output Power
Power supplied by the motor, estimated by the dUUUULLLLnnnn
MainsVoltage
Line voltagettttHHHHrrrr MotorThermal
Thermal state: 100% corresponds to the nomintriggers an OLF
fault (motor overload)
ttttHHHHdddd DriveThermal
Thermal state of the drive: 100% corresponds tothe drive
triggers an OHF fault (drive overheat
LLLLFFFFtttt Last Fault
Displays the last fault which occurred.LLLLFFFFrrrr Freq.
Ref.
This adjustment parameter appears instead of tis activated: LCC
parameter in the control men
AAAAPPPPHHHH Power Used
Energy consumptionrrrrttttHHHH Run Time
Continuous operating time (motor powered up92
EN
GL
ISH
resent and zero reference
p (see the "drive" menu)Hz
Hz
rpm
A
ortional to rFr, according to a coefficient USC which can
corresponding to the application (metres/second, for 9999 the
display is divided by 1000.
%rive. 100% corresponds to nominal power.
V
%al thermal state of the motor. Above 118%, the drive
% the nominal thermal state of the drive. Above 118%,
ing). It can be reset below 70%.
Hzhe FrH parameter when drive control via the terminal u
kWh or MWh
hr), in hours
-
93
EN
GL
ISH
Adjust Menu
This menu can be accessed when the switch and . Adjustment
parameters can be modifiedin stop mode OR during operation. Ensure
that any changes made during operation are not dangerous;changes
should preferably be made in stop mode.
List of adjustment parameters which can be accessed in the
factory configuration, without an I/O extensioncard present.
(1) In is the drive nominal current shown in the catalogu
Code Description Adjustment range Factory settingLLLLFFFFrrrr
Freq. Ref. - Hz LSP to HSP
Appears when control via the terminal is activaAAAACCCCCCCC
ddddEEEECCCC
Acceleration - sDeceleration - s
0.05 to 999.90.05 to 999.9
Acceleration and deceleration ramp times (0 toLLLLSSSSPPPP Low
Speed - Hz 0 to HSP
Low speedHHHHSSSSPPPP High Speed - Hz LSP to tFr
High speed: ensure that this setting is suitableFFFFLLLLGGGG
Gain - % 0 to 100
Frequency loop gain: used to adapt the responFor high resistive
torque, high inertia or fast cy
SSSSttttAAAA Stability - % 0 to 100Used to adapt the return to
steady state after amachine. Gradually increase the stability to
av
IIIIttttHHHH ThermCurrent - A 0.25 to 1.1 InCurrent used for the
motor thermal protection.plate.
ttttddddCCCC DC Inj. Time - s 0 to 30 s ConDC injection braking
time. If this is increased tocurrent injection. The injection
current will equ
FFFFFFFFtttt NST Thrshold - Hz 0 to HSPFreewheel stop trip
threshold: on a stop on rampactivated until the speed drops below
this threshactivated.
JJJJPPPPFFFF
JJJJFFFF2222
JJJJFFFF3333
Jump Freq. - Hz 0 to HSPJump frequency: prohibits prolonged
operationThis function prevents a critical speed which le
UUUUSSSSCCCC Machine Coef 0.01 to 100Coefficient applied to
parameter rFr (output fredisplayed via parameter USP: USP = rFr x
US
ttttLLLLSSSS LSP Time - s 0 to 999.9Low speed operating time.
After operating at Lautomatically. The motor restarts if the
frequencommand is still present. Caution : value 0 core and on the
rating plate.
ted: parameter LLLLCCCCCCCC in the control menu3 s3 s
nominal motor frequency (FrS)).0 Hz
50 Hz for the motor and the application.
20se of the machine speed according to the dynamics. cle
machines, increase the gain gradually.
20 speed transient, according to the dynamics of the
oid any overspeed. (1) According to drive rating
Set ItH to the nominal current on the motor rating
t 0.5 s more than 30 s, Cont is displayed, Continuous
al SdC after 30 s.0 Hz
or fast stop request, the selected type of stop is old. Below
this threshold, freewheel stopping is
0 Hz over a frequency range of +/-2.5 Hz around JPF. ads to
resonance.
1quency applied to the motor), the machine speed is C
0 (no time limit)SP for a given time, the motor is stopped cy
reference is greater than LSP and if a run responds to an unlimited
period
-
Adjust Menu
The following parameters may be accessible following
reassignment of the I/O in the standard product ormodification of
the settings.
(1) In corresponds to the drive nominal current indicated
Code Description Adjustment range Factory settingAAAACCCC2222
Accel. 2 - s 0.05 to 999.9 5 s
2 nd acceleration ramp timeddddEEEE2222 Decel. 2 - s 0.05 to
999.9
2 nd deceleration ramp time. These parametersparameter) is other
than 0 Hz or if a logic inpu
SSSSddddCCCC dc I at rest - A 0.1 to 1.1 In Level of injection
braking current applied after
Check that the motor will withstand thisIIIIddddCCCC DC
Inj.Curr. - A 0.1 to 1.1 In
Level of DC injection braking current This paraassigned to
current injection braking. After 30 sto a higher value.
PPPPFFFFLLLL V/f Profile - % 0 to 100%Can be used to adjust the
motor quadratic powbeen inhibited.
SSSSPPPP2222 Preset Sp.2 - Hz LSP to HSP2nd preset speed
SSSSPPPP3333 Preset Sp.3 - Hz LSP to HSP3rd preset speed
SSSSPPPP4444 Preset Sp.4 - Hz LSP to HSP4th preset speed
SSSSPPPP5555 Preset Sp.5 - Hz LSP to HSP5th preset speed
SSSSPPPP6666 Preset Sp.6 - Hz LSP to HSP6th preset speed
SSSSPPPP7777 Preset Sp.7 - Hz LSP to HSP7th preset speed
SSSSPPPP8888 Preset Sp.8 - Hz LSP to HSP8th preset speed
UUUUFFFFrrrr IR Compens. - % 0 to 800%UUUUFFFFrrrr only appears
if the SPC parameter (speadjust the value measured during
auto-tuning
JJJJOOOOGGGG Jog Freq. - Hz 0 to 10 HzJog frequency
JJJJGGGGtttt Jog Delay - s 0 to 2 sAnti-repeat delay between two
consecutive jog94
EN
GL
ISH
in the catalogue and on the drive rating plate.
5 s can be accessed if the ramp switching threshold (Frt t has
been assigned to ramp switching.(1) According to drive rating30
seconds if tdC = Cont. current without overheating.(1) According to
drive ratingmeter can be accessed if a logic input has been econds
the injection current is limited to 0.5 Ith if set
20%er supply ratio when the energy-saving function has
10 Hz
15 Hz
20 Hz
25 Hz
30 Hz
35 Hz
50 Hz
0%cial motor) of the drive menu is set to "yes". Used to that
corresponds to 100%.
10 Hz
0.5 s operations
-
95
EN
GL
ISH
Adjust Menu
(1) In corresponds to the drive nominal current indicated
Code Description Adjustment range Factory settingddddttttSSSS
Tacho Coeff. 1 to 2 1
Multiplication coefficient of the feedback associated with the
tachogenerator function:
dtS =
rrrrPPPPGGGG PI Prop.Gain 0.01 to 100PI regulator proportional
gain
rrrrIIIIGGGG PI Int. Gain 0.01 to 100/sPI regulator integral
gain
FFFFbbbbSSSS PI Coeff. 1 to 100PI feedback multiplication
coefficient
PPPPIIIICCCC PI Inversion no - yesReversal of the direction of
correction of the Pno: normal yes: reverse
FFFFttttdddd Freq.Lev.Att - Hz LSP to HSPMotor frequency
threshold above which the log
FFFF2222dddd Freq.2 Att - Hz LSP to HSPFrequency 2 threshold:
same function as Ftd,
CCCCttttdddd Curr.Lev.Att - A 0 to 1.1 In (1Current threshold
above which the logic outpu
ttttttttdddd ThermLev.Att - % 0 to 118%Motor thermal state
threshold above which the
PPPPSSSSPPPP PI Filter - s 0.0 to 10.0Used to adjust the filter
time constant on the P
PPPPIIII2222 PI Preset 2 - % 0 to 100%2 nd preset PI reference,
when a logic input has 100% = process max 0% = process min
PPPPIIII3333 PI Preset 3 - % 0 to 100%3 rd preset PI reference,
when a logic input has 100% = process max0% = process min
ddddttttdddd ATV th.fault 0 to 118%Drive thermal threshold above
which the logic
The parameters with a grey background appea
9tachogenerator voltage at max. speed in the catalogue and on
the drive rating plate.
1
1/s
1
no
I regulator
50 Hzic output changes to 1
50 Hzfor a 2nd frequency value) 1.1 In (1)t or the relay changes
to 1
100% logic output or the relay changes to 1
0 sI feedback
30%been assigned to the 4 preset PI references function.
60%been assigned to the 4 preset PI references function.
105%output or the relay changes to 1
r if an I/O extension card has been installed.
HSP
-
Drive Menu
This menu can be accessed when the switch is in position .The
parameters can only be modified in stop mode with the drive
locked.
Drive performance can be optimized by:- entering the values
given on the rating plate in the drive menu- performing an
auto-tune operation (on a standard asynchronous motor)
(1) In is the drive nominal current shown in the catalogu
Code Description Adjustment rUUUUnnnnSSSS Nom.Mot.Volt - V 200
to 480 V
Nominal motor voltage marked on the rating pmodel.
FFFFrrrrSSSS Nom.Mot.Freq - Hz 10 to 500 HzNominal motor
frequency given on the rating p
nnnnCCCCrrrr Nom.Mot.Curr - A 0.25 to 1.1 InNominal motor
current given on the rating plat
nnnnSSSSPPPP Nom.MotSpeed - rpm 0 to 9999 rpmNominal motor speed
given on the rating plate
CCCCOOOOSSSS Mot. Cos Phi 0.5 to 1Motor Cos Phi given on the
rating plate
ttttUUUUnnnn Auto Tuning no - yesUsed to auto-tune motor control
once this paracomplete, the parameter automatically returnsCaution:
Auto-tuning will only be performed if nor "fast stop" function has
been assigned to a
ttttFFFFrrrr Max. Freq. - Hz 10 to 500 HzMaximum output
frequency. The maximum vaparameter (drive menu)
nnnnLLLLdddd Energy Eco no - yesOptimizes motor efficiency
FFFFddddbbbb I lim adapt. no - yesAdaptation of the limit
current as a function of the load curve changes as a function of
the ga
bbbbrrrrAAAA DecRampAdapt no - yesActivating this function
automatically increasesa value for the inertia of the load, thus
avoidingincompatible with positioning on a ramp and w
FFFFrrrrtttt SwitchRamp2 - Hz 0 to HSPRamp switching frequency
Once the output freaccount are AC2 and dE2.96
EN
GL
ISH
e and on the rating plate.
ange Factory setting400 V
late. The adjustment range depends on the drive
50 Hzlate (1) according to drive rating
eaccording to drive rating
according to drive rating
no
meter has been set to yes. Once auto-tuning is to done or no in
the event of a fault.o command has been activated. If a "freewheel
stop" logic input, this input must be set to 1 (active at 0).
60 Hzlue depends on the switching frequency. See SFR
yes
no
the output frequency (ventilation applications where s
density).
yes the deceleration time, if this has been set at too low the
drive going into ObF fault. This function may be ith the use of a
braking resistor.
0 Hzquency exceeds Frt, the ramp times taken into
-
97
EN
GL
ISH
Drive Menu
Code Description Adjustment range Factory settingSSSStttttttt
Stop Type STN - FST - NST - DCI STN
Type of stop.On a stop request, the type of stop is activated up
to the FFt threshold (adjust menu). Below the threshold, freewheel
stopping occurs.STN: follow rampFST: fast stopNST: freewheel
stopDCI: DC injection stop
rrrrPPPPtttt Ramp Type LIN - S - UDefines the shape of the
acceleration and decLIN: linear S: S ramp U: U ramp
ddddCCCCFFFF DecRAmpCoeff 1 to 10Deceleration ramp time
reduction coefficient w
CCCCLLLLIIII Int. I Lim - A 0 to 1.1 In (1)The current limit is
used to limit motor overhea
AAAAddddCCCC Auto DC Inj. no - yesUsed to deactivate automatic
DC injection bra
PPPPCCCCCCCC Motor P Coef. 0.2 to 1Defines the relationship
between the drive nominput has been assigned to the motor
switchin
HSP
t
0
t2
t1
f (Hz)
HSP
0
f (Hz)
HSP
t
0
t2
t1
f (Hz)
HSP
0
f (Hz)
S-shape ramps
U-shape rampsLINeleration ramps.
4hen the fast stop function is active.
1.1 In ting.
yesking on stopping.
1inal power and the lowest-rated motor when a logic
g function.
t
t2
t1
t
t2
t1
The rounding coefficient is fixed,where t2 = 0.6 x t1 and t1 =
setramp time.
The rounding coefficient is fixed,where t2 = 0.5 x t1 and t1 =
setramp time.
-
Drive Menu
(1) yes if SSSSFFFFtttt = LLLLFFFF, no if SSSSFFFFtttt =
HHHHFFFF1111 or HHHHFFFF2222l
has been installed.
Code Description Adjustment range Factory settingSSSSFFFFtttt Sw
Freq.Type LF-HF1-HF2 LF
Used to select a low switching frequency (LF) or a high
switching frequency (HF1 or HF2). HF1 switching is designed for
applications with a low load factor without derating the drive. If
the thermal state of the drive exceeds 95%, the frequency
automatically changes to 2 or 4 kHz depending on the drive rating.
When the thermal state of thefrequency is re-established. HF2
switching is dderating of the drive by one rating: the drive
pathermal current, etc).
Modifying this parameter results in thsettings : nCr, CLI, Sfr,
nrd (Drive menu) ItH, IdC,Ctd (Adjust menu)
SSSSFFFFrrrr Sw Freq - kHz 0.5-1-2-4 -8-Used to select the
switching frequency. The adIf SFt = LF: 0.5 to 2 or 4 kHz according
to the If SFt = HF1 or HF2: 2 or 4 to 16 kHz accordinThe maximum
operating frequency (tFr) is limi
nnnnrrrrdddd Noise Reduct no - yesThis function modulates the
switching frequen
SSSSPPPPCCCC Special Motor no - yes - PSIt should be used for a
motor supply in U/f ratio in the "Adjust" menu.No: normal motorYes:
special motorPSM: small motor. It inhibits detection of "UncnLd in
the Drive menu for this to operate corre
Perform an auto-tune
PPPPGGGGtttt PG Type INC-DETDefines the type of sensor used when
an encoINC: incremental encoder (A, A+, B, B+ are haDET: detector
(only A is hard-wired)
PPPPLLLLSSSS Num. Pulses 1 to 1024Defines the number of pulses
per sensor revol
The parameters with a grey background appea
SFr(kHz) 0.5 1 2tFr (Hz) 62 125 25098
EN
GL
ISH
drive drops back to 70%, the selected switching esigned for
applications with a high load factor with rameters are scaled
automatically (torque limit, e following parameters returning to
factory
12-16 kHz According to drive ratingjustment range depends on the
SFt parameter.
drive ratingg to the drive ratingted according to the switching
frequency:
(1)cy randomly to reduce motor noise.M no
with the IR compensation set via the UUUUFFFFrrrr parameter
ontrolled loss downstream". Deactivate the function ctly.
DETder feedback I/O card is installed: rd-wired)
1024ution.
r if a VW3 A58202 I/O extension card
4 8 12 16500 500 500 500
-
99
EN
GL
ISH
Control Menu
This menu can be accessed when the switch is in position . The
parameters can only be modified in stopmode with the drive
locked.
This option only appears if 2-wire control is configured.
Code Description Adjustment range Factory settingttttCCCCCCCC
TermStripCon 2W- 3W (2-wire - 3-wire) 2W
Configuration of terminal strip control: 2-wire or 3-wire
control.Modification of this parameter requires double confirmation
as it results in reassignment of the logic inputs. By changing from
2-wireare shifted by one input. The LI3 assignin 3-wire control. In
3-wire control, input
The I/O with a grey background can be access3-wire control
(Pulse control: one pulse is suautomatic restart function.Wiring
example:LI1: stopLI2: forwardLIx: reverse
Code Description Adjustment rttttCCCCtttt Type 2 Wire
LEL-TRN-PF
Defines 2-wire control: - according to the state of the logic
inputs (- according to a change in state of the logi- according to
the state of the logic inputs w
Priorit. FW)Wiring example:LI1: forwardLIx: reverse
rrrrIIIInnnn RV Inhibit no - yes Inhibition of operation in the
opposite directio
reversal is required by a summing or loop co Inhibition of
reverse operation if it is controlle
The parameters with a grey background appea
Macro-configurationLI1LI2LI3LI4LI5LI6
24 V LI1 LI2 LIx
ATV38 control termin
ATV38 control termin
24 V LI1 LIx control to 3-wire control, the logic input
assignments ment in 2-wire control becomes the LI4 assignment s LI1
and LI2 cannot be reassigned.
ed if an I/O extension card has been installed. fficient to
control start-up). This option inhibits the
ange Factory settingo LEL
LEL: 2 wire)c inputs (TRN: 2 wire trans)ith forward always
having priority over reverse (PFo:
no
n to that controlled by the logic inputs, even if this ntrol
function.d by the FWD/REV key on the terminal.
r if an I/O extension card has been installed.
Variable torqueSTOPRUN forwardRUN reverseFault resetramp
switchingnot assigned
als
als
-
Control Menu
(1) The AO output is available if an I/O extension card h
Code Description Adjustment range Factory settingbbbbSSSSPPPP
deadb./pedst no
BNS: pedestalBLS: deadband
no
Management of operation at low speed:
CCCCrrrrLLLL
CCCCrrrrHHHH
AI2 min Ref. - mAAI2 Max Ref. - mA
0 to 20 mA4 to 20 mA
Minimum and maximum values of the signal oThese two parameters
are used to define the spossibilities, one of which is to configure
the in
AAAAOOOOLLLL
AAAAOOOOHHHH
Min. Val AO - mAMax. Val AO - mA
0 to 20 mA0 to 20 mA
MinimumAO1 (1)These twAO and
Reference
No
0
LSP
HSP
100 %
F : motor frequency
0
LSP
HSP
F : mo
Reference
Deadband
(BLS)
0
LSP
HSP
100 %
F : motor frequency
AI 2
(mA)
0
LSP
HSP
CrL CrH 20
Frequency
AO (mA)
0
Max.
AOL AOH 20
Parameter100
EN
GL
ISH
as been installed.
4 mA20 mA
n input AI2.ignal sent to AI2. There are several configuration
put for a 0-20 mA, 4-20 mA, 20-4 mA, etc signal.
0 mA20 mA
and maximum values of the signal on outputs AO and
o parameters are used to define the output signal on AO1. Eg:
0-20 mA, 4-20 mA, 20-4mA, etc
Reference
Pedestal
(BNS)
100 %
tor frequency
-
101
EN
GL
ISH
Control Menu
Code Description Adjustment range Factory settingSSSSttttrrrr
Save Ref. NO-RAM-EEP NO
Associated with the + speed/- speed function, this function is
used to save the reference: when run commands disappear (saved in
RAM) or when the line supply disappears (saved in EEPROM). On the
next start-up, the speed reference is the last reference saved.
LLLLCCCCCCCC Keypad Comm. No - YesUsed to activate drive control
via the terminal. active. The speed reference is given by
paraminjection stop commands and external fault remconnection is
cut, the drive locks in SLF fault m
This function is no longer accessible
PPPPSSSStttt STOP Priorit No - YesThis function gives priority
to the STOP key irrfieldbus).To change the PSt parameter to "no":1
- Display no2 - Press the ENT key3 - The drive displays See manual4
- Press then then ENTFor applications with continuous processes, it
"no").
AAAAdddddddd DriveAddress 0 to 31Drive address when it is
controlled via the conprogramming terminal removed).
ttttbbbbrrrr BdRate RS485 9600-19200Transmission speed via the
RS485 serial link (9600 bps19200 bps
If ttttbbbbrrrr 19200, the terminal can no loreconfigure
ttttbbbbrrrr as 19200 via the ser119).
rrrrPPPPrrrr Reset cnts No-APH-RTHReset kWh or the operating
time.NoAPH: Reset kWh to zeroRTH: Reset operating time to zeroThe
reset command must be confirmed with "EAPH and RTH take effect
immediately. The paNoThe STOP/RESET, RUN and FWD/REV keys are eter
LFr. Only the freewheel stop, fast stop, DC ain active at the
terminals. If the drive/terminal ode.
by the keypad if LIX=FTK.
Yesespective of the control channel (terminals or
is advisable to configure the key as inactive (set to
0nector port (with the operator terminal and
19200effective on the next power-up)
nger be used. To reactivate the terminal, ial link or revert to
factory settings (see page
No
NT"rameter then automatically reverts to No
-
I/O Menu
This menu can be accessed when the switch is in position .The
assignments can only be modified in stop mode with the drive
locked.
The inputs and outputs available in the menu depend onthe
selections made previously in the control menu.
Summary table of the logic input assignm
CAUTION: If a logic input is assigned to "Fperformed by linking
this input to the +24V, asstate 0.
Code FunctionLLLLIIII2222 LI2 Assign.
See the summary table and description of the functions.
I/O extension option cardsDrive without optionNO :Not
assigned
RV :Reverse
RP2:Switch ramp2
JOG
+SP: + Speed
-SP: - Speed
PS2: 2 Preset Speeds
PS4 : 4 Preset Speeds
PS8 : 8 Preset Speeds
NST:Freewhl Stop
DCI:DC inject.
FST:Fast stop
CHP:Multi. Motor
FLO:Forced Local
RST:Fault Reset
RFC:Auto/Manu (ATN:Auto Tuning
PAU:PI Auto/Man (PI AutoPR2:PI 2 Preset (2 preset PI
referePR4:PI 4 Preset (4 preset PI refereEDD:Ext flt.
FTK: Forc.Keyp.102
EN
GL
ISH
the I/O cards installed (if any) in the drive, as well as
ents (exc. 2-wire / 3-wire option)
reewheel stop" or "Fast stop", start-up can only be these stop
functions are active when the inputs are at
2 logic inputs LI5-LI63 logic inputs LI2 to LI4
(Not assigned) X(Reverse) X
(Ramp switching) X(Jog operation) X
(+ speed) X(- speed) X
(2 preset speeds) X(4 preset speeds) X(8 preset speeds)
X(Freewheel stop) X
(Injection stop) X(Fast stop) X
(Motor switching) X(Forced local mode) X
(Fault reset) XReference switching) X
(Auto-tuning) X/Man) If one AI = PIF Xnces) If one AI = PIF
Xnces) If one AI = PIF X
(external fault) X(Force to keypad) X
-
103
EN
GL
ISH
I/O Menu
Summary table of the encoder and analog input assignments
(1) NB: The menu for assigning encoder input A+, A-, B
Summary table for logic output assignme
I/O extension option cards Analog input AI3
Encoder input A+, A-,
B+, B-(1)
Drive without option Analog input
NO :Not assigned (Not assigFR2:Speed Ref2 (Speed
referencSAI:Summed Ref. (Summed referePIF:PI Regulator (PI
regulator feedbPIM:PI Man.ref. (Manual PI speed refere
If one AI =SFB:Tacho feedbk (TachogenerPTC:Therm.Sensor (PTC
proRGI:PG feedbk (Encoder or detector feedb
I/O extension option card
Drive without optionNO :Not assigned
RUN:DriveRunning
OCC:Output Cont. (DownstreaFTA:Freq Attain. (FrequencyFLA:HSP
Attained
CTA:I Attained (CurrenSRA: FRH Attained (FrequencyTSA:MtrTherm
Lvl (Motor thermaAPL:LossFollower (LosF2A:Freq.2 Att. (Frequency
2tAd:ATV th.alarm (Drive therma+, B- is called Assign AI3.
nts
AI2ned) X X Xe 2) X Xnce) X X Xack) X Xnce) PIF
X
ator) Xbes) Xack) X
Logic output LO
Relay R2(Not assigned) X X(Drive running) X X
m contactor control) X X threshold reached) X X
(HSP reached) X Xt threshold reached) X X reference reached) X
Xl threshold reached) X Xs of 4/20 mA signal) X X threshold
reached) X Xl threshold reached) X X
-
I/O Menu
Summary table for the analog output assignments
Once the I/O have been reassigned, the parameters menus, and the
macro-configuration indicates "CCCCUUUUSSSSadjustment parameters
which the user must not for
I/O extension option card Analog output AODrive without option
Analog output AO1NO :Not assigned (Not assigned) XOCR:Motor Curr.
(Motor current) XOFR:Motor Freq
ORP:Output ramp
ORS:Signed ramp (OPS:PI ref. (PI reference ouOPF:PI Feedback (PI
feedback ouOPE:PI Error (PI error ouOPI:PI Integral (PI integral
ouOPR:Output Power
THR:MotorThermal (THD:DriveThermal
I/O AssignmentsLI RP2 Ramp switchingLI JOG Jog operationLI PS2 2
preset speedsLI PS4 4 preset speedsLI PS8 8 preset speedsLI DCI
Injection stopLI PR4 4 preset PI referencesAI PIF PI regulator
feedbackAI SFB TachogeneratorLO/R2 FTA Frequency threshold
reachedLO/R2 CTA Current threshold reachedLO/R2 TSA Motor thermal
threshold reachedLO/R2 F2A Frequency 2 threshold reachedLO/R2 TAD
Drive thermal threshold reached104
EN
GL
ISH
related to the function automatically appear in the::::
CCCCuuuussssttttoooommmmiiiisssseeeedddd". Some reassignments
result in newget to configure in the adjust menu:
(Motor speed) X(Ramp output) X
Signed ramp output) Xtput) If one AI = PIF Xtput) If one AI =
PIF Xtput) If one AI = PIF Xtput) If one AI = PIF X
(Motor power) XMotor thermal state) X(Drive thermal state) X
Parameters to setAAAACCCC2222 ddddEEEE2222
JJJJOOOOGGGG JJJJGGGGtttt
SSSSPPPP2222
SSSSPPPP2222----SSSSPPPP3333----SSSSPPPP4444
SSSSPPPP5555----SSSSPPPP6666----SSSSPPPP7777----SSSSPPPP8888
IIIIddddCCCC
PPPPIIII2222----PPPPIIII3333
rrrrPPPPGGGG----rrrrIIIIGGGG----PPPPIIIICCCC----PPPPSSSSPPPP
ddddttttSSSS
FFFFttttdddd
CCCCttttdddd
ttttttttdddd
FFFF2222dddd
ddddttttdddd
-
105
EN
GL
ISH
I/O Menu
Some reassignments result in new adjustment parameters which the
user must not forget to configurein the control, drive or fault
menu:
I/O Assignments Parameters to setLI -SP - speed SSSSttttrrrr
(control menu)LI FST Fast stop ddddCCCCFFFF (drive menu)LI RST
Fault resetLI CHP Motor switchingAI SFB TachogeneratorA+, A-, B+,
B-
SAI Summed reference
A+, A-, B+, B-
RGI PG feedbackrrrrSSSStttt (fault menu)PPPPCCCCCCCC (drive
menu)SSSSdddddddd (fault menu)PPPPGGGGtttt, PPPPLLLLSSSS (drive
menu)
PPPPGGGGtttt, PPPPLLLLSSSS (drive menu)
-
Configurable I/O Application Functions
Function compatibility tableThe choice of application functions
may be limited by incompatibility between certain functions.
Functionswhich are not listed in this table are fully
compatible.
Incompatible functions
Compatible functions
Not applicablePriority functions (functions which canThe
function indicated by the arrow ha
Stop functions have priority over run commands.Speed references
via logic command have priority over
DC injection braking
Summed inputsPI regulator+/- speedReference switchingFreewheel
stopFast stopJog operationPreset speedsSpeed regulation
withtachogenerator or encoder
DC in
jectio
n brak
ing
Sum
med
inpu
tsPI
regu
lator
+/-
spee
d
106
EN
GL
ISH
not be active simultaneously):s priority over the other.
analog references.
Refe
renc
e sw
itchi
ngFr
eewh
eel s
top
Fast
sto
pJo
g op
erat
ionPr
eset
spe
eds
Spee
d re
gulat
ion w
ithta
chog
ener
ator
or e
ncod
er
-
107
EN
GL
ISH
Configurable I/O Application Functions
Logic input application functions Operating direction:
forward/reverseReverse operation can be disabled for applications
requiring only a single direction of motor rotation.
2-wire control Run (forward or reverse) and stop are controlled
by the same logic input, for which state 1 (run) or 0 (stop), ora
change in state is taken into account (see the 2-wire c3-wire
control Run (forward or reverse) and stop are controlled by 2 dLI1
is always assigned to the stop function. A stop is ob
The pulse on the run input is stored until the stop input
During power-up or a manual or automatic fault reset, resetting
of the forward, reverse, and injection stopRamp switching : 1st
ramp: ACC, dEC; 2nd ramp: ACTwo types of activation are
possible:
- activation of a logic input LIx- detection of an adjustable
frequency threshold
If a logic input is assigned to the function, ramp switchin
Step by step operation (JOG): Low speed operation pIf the JOG
contact is closed and then the operating direcof the ACC, dEC, AC2,
dE2 settings. If the direction cothe configured ramps are used.
Parameters which can be accessed in the adjust menu:- JOG speed-
anti-repeat delay (minimum time between 2 JOGontrol menu).
ifferent logic inputs.tained on opening (state 0).opens.
the motor can only be supplied with power after prior
commands.2, dE2
g can only be performed by this input.
ulsetion contact is actuated, the ramp is 0.1 s irrespective
ntact is closed and the JOG contact is then actuated,
commands)
-
Configurable I/O Application Functions
+/- speed: Two types of operation are available.1 Use of single
action buttons: two logic inputs are required in addition to the
operating direction(s).
The input assigned to the + speed command increases the speed,
the input assigned to the - speed command decreases the speed.
This function accesses the STr save reference parameter in the
Control menu.
2 Use of double action buttons: only one logic input ass
+ speed/- speed with double action buttons:
Wiring example:
LI1: forwardLIx: reverseLIy: + speed
This type of +/- speed is incompatible with 3-wire contrassigned
to the logic input with the highest number (for In both cases, the
maximum speed is given by texample, connect AI1 to the +10V.
Description: 1 button pressed twice for each direction ofEach
action closes a volt-free contact.
Released(- speed)
forward button reverse button
LI1
a c
b d
LIx LIy
ATV38 control terminals
+ 24
Forward
LSP
LSP
0
0
0
Press 2
Press 1
a a a a a a
b b
Reverse
Press 2
Press 1
Motor
frequency108
EN
GL
ISH
igned to + speed is required.
ol. In this case, the - speed function is automaticallyexample:
LI3 (+ speed), LI4 (- speed)).he references applied to the analog
inputs. For
rotation.
Press 1(speed maintained)
Press 2(+ speed)
a a and bc c and d
a
c c
d
-
109
EN
GL
ISH
Configurable I/O Application Functions
Preset speeds2, 4 or 8 speeds can be preset, requiring 1, 2 or 3
logic inputs respectively.The following assignment order must be
observed : PS2 (LIx), then PS4 (LIy), then PS8 (LIz).
To unassign the logic inputs, the following order must be
Reference switching To configure the AI1/AI2 reference
switching:- Verify that the LI is not configured to
"RFC:Auto/Manu"- Configure a LI to "RFC:Auto/Manu". The second
refere
To configure the AI1/AI3 reference switching:- Verify that the
LI is not configured to "RFC:Auto/Manu"- Configure AI3 to
"FR2:Speed Ref2".- Configure a LI to "RFC:Auto/Manu". The second
refere
Connection diagram
Open contact, reClosed contact,
Freewheel stopCauses the motor to stop using the resistive
torque onlyA freewheel stop is obtained when the logic input
opens
DC injection stopAn injection stop is obtained when the logic
input closesFast stopBraked stop with the deceleration ramp time
reduced bmenu.A fast stop is obtained when the logic input opens
(state
2 preset speeds 4 preset speeds 8 preset speedsAssign: LIx to
PS2 Assign: LIx to PS2 then
LIy to PS4Assign: LIx to PS2
LIx speed reference LIy LIx speed refer0 LSP+reference 0 0
LSP+refere1 SP2 0 1 SP2
1 0 SP31 1 SP4
COM
0-20mA
4-20mA
+10AI 1LI x + 24 AI 2 observed: PS8 (LIz), then PS4 (LIy), then
PS2 (LIx).
(if so, configure the LI to "NO:Not assigned").nce is then
AI2.
(if so, configure the LI to "NO:Not assigned").nce is then
AI3.
ference = AI2 or AI3reference = AI1
. The motor power supply is cut. (state 0).
(state 1).
y a reduction factor dCF which appears in the drive
0).
LIy to PS4, then LIz to PS8ence LIz LIy LIx speed referencence 0
0 0 LSP+reference
0 0 1 SP20 1 0 SP30 1 1 SP41 0 0 SP51 0 1 SP61 1 0 SP71 1 1
SP8
-
Configurable I/O Application Functions
Motor switchingThis function enables two motors with different
ratings to be powered by the same drive in succession,
withswitching performed by an appropriate sequence at the drive
output. Switching must take place with the motorstopped, and the
drive locked. The following internal parameters are switched
automatically by the logiccommand:
This function automatically disables thermal protection
oAccessible parameter: Ratio of PCC motor ratings in the
Fault resetTwo types of reset are available: partial or general
(rSt Partial reset (rSt = RSP):Used to clear the stored fault and
reset the drive if the cFaults affected by partial clearing:
General reset (rSt = RSG):This inhibits all faults (forced
operation) except SCFis closed.
Forced local modeUsed to switch between line control mode
(serial link) athe terminal).Auto-tuningWhen the assigned logic
input changes to 1 an autoparameter tUn in the drive menu.
Caution: Auto-tuning will only be performed if or "fast stop"
function has been assigned to a Application: Motor switching for
example.
Preset PI auto-man, PI reference: See PI function (paExternal
faultWhen the assigned logic input changes to 1, the motStop+flt
parameter in the Drive menu), and the drive Force to keypadEnables
a LI to be used to select for local control:If LIX=FTK and FTK=0:
operation by the control terminaIf LIX=FTK and FTK=1: control by
the keypad
- If LIX=FTK, the LCC function in the controconsequence it is
impossible to control the- When FTK has been disactivated it is
neccontrol menu.
- nominal motor current- injection current
- line overvoltage - communicatio- DC bus overvoltage - motor
overloa- motor phase loss - loss of 4-20 m- overhauling - external
fault110
EN
GL
ISH
n the second motor. drive menu.
parameter in the "fault" menu).ause of the fault has
disappeared.
(motor short circuit) while the assigned logic input
nd local mode (controlled via the terminal strip or via
-tuning operation is triggered, in the same way as
no command has been activated. If a "freewheel stop"logic input,
this input must be set to 1 (active at 0).
ge 111)
or stops (according to the configuration of the
LLLLSSSSFFFFlocks in EPF external fault fault mode.
ls
l menu is no longer accessible by the keypad. In drive by the
keypad.cesary to revalidate the function LCC again in the
n fault - motor overheatingd - serial link faultA - drive
overheating
- overspeed
-
111
EN
GL
ISH
Configurable I/O Application Functions
Analog input application functions Input AI1 is always the speed
reference.
Assignment of AI2 and AI3Summed speed reference: The frequency
references provided by AI2 and AI3 can be summed with AI1.
Speed regulation with tachogenerator: (Assignmeninput): used for
speed correction via tachogenerator feeAn external divider bridge
is required to adapt the voltagbe between 5 and 9 V. A precise
setting is then obtained
PTC probe protection: (only with an I/O extension cprotection of
the motor by connecting the PTC probes inPTC probe
characteristics:Total resistance of the probe circuit at 20 C = 750
Ohm
PI regulator: Used to regulate a process with a referenramps are
all linear, even if they are configured differenWith the PI
regulator, it is possible to:
- Adapt the feedback via FbS.- Correct PI inversion.- Adjust the
proportional and integral gain (RPG and- Assign an analog output
for the PI reference, PI fe- Apply a ramp to establish the action
of the PI (AC2
If PSP = 0 the active ramps are ACC/dEC. The dEThe motor speed
is limited to between LSP and HSP.
Note: PI regulator mode is active if an AI input is assigmade
after disabling any functions incompatible with PI
Auto/Man: This function can only be accessed when thcard with
analog input Via logic input LI, this is used to switch operation
to s
and PI regulation if LIx = 1 (auto).
PIC
X1
PI
inversion
PI
regulator
PI
feedback
PI
reference
Manual reference
PSP
Low-pass
filter
Multiplier
Auto/man
RPG
RIG
R
Ram
if PSP >
FBS
10
+
-t to AI3 only with an I/O extension card with analogdback.e of
the tachogenerator. The maximum voltage must
by setting parameter dtS available in the adjust menu.ard with
analog input). Used for the direct thermal the motor windings to
analog input AI3.
s.
ce and a feedback given by a sensor. In PI mode thetly.
RIG).edback and PI error.) on start-up if PSP > 0.C ramp is
always used when stopping.
ned to PI feedback. This AI assignment can only be (see page
106).
e PI function is active, and requires an I/O extension
peed regulation if LIx = 0 (manual reference on AI3),
Reference
Ramp
if PSP = 0
Ramp
ACC
dEC
AC2
dE2
ACC
dEC
un command
p
0
Auto
Man
X
-
Configurable I/O Application Functions
Preset references:2 or 4 preset references require the use of 1
or 2 logic inputs respectively:
Encoder input application funct(only with an I/O extension card
with encoder input)Speed regulation: Used to correct the speed via
an insupplied with the card). Summed speed reference: The reference
provideddocumentation supplied with the card)Applications:
- Synchronization of the speed of a number of drivesthe speed
ratio of one motor in relation to that of a
- Reference via encoder.
Logic output application functioRelay R2, LO solid state output
(with I/O extension cardDownstream contactor control (OCC): can be
assignEnables the drive to control an output contactor (located the
contactor is made when a run command appears. Tis no current to the
motor.
If a DC injection braking function has been conmode, as the
contactor only opens at the end o
Drive running (RUN): can be assigned to R2 or LOThe logic output
is at state 1 if the motor power supplycommand is present with a
zero reference.
Frequency threshold reached (FTA): can be assigneThe logic
output is at state 1 if the motor frequency is gFtd in the adjust
menu.Frequency 2 threshold reached (F2A): can be assignThe logic
output is at state 1 if the motor frequency is gF2d in the adjust
menu.Reference reached (SRA): can be assigned to R2 or The logic
output is at state 1 if the motor frequency is eq
2 preset references 4 preset referencesAssign: LIx to Pr2
Assign: LIx to Pr2, then LIy to Pr4
LIx Reference LIy LIx Reference0 Analog reference 01 Process max
(= 10 V) 0
11112
EN
GL
ISHions
cremental encoder or detector. (See documentation
by the encoder input is summed with AI1. (see
. Parameter PLS on the "drive" menu is used to adjust
nother.
ns)ed to R2 or LO
between the drive and the motor). The request to closehe request
to open the contactor is made when there
figured, it should not be left operating too long in stopf
braking.
is provided by the drive (current present) or if a run
d to R2 or LO reater than or equal to the frequency threshold
set by
ed to R2 or LO reater than or equal to the frequency threshold
set by
LO ual to the reference value.
0 Analog reference1 PI2 (adjustable)0 PI3 (adjustable)1 Process
max (= 10 V)
-
113
EN
GL
ISH
Configurable I/O Application Functions
High speed reached (FLA): can be assigned to R2 or LO The logic
output is at state 1 if the motor frequency is equal to HSP.
Current threshold reached (CTA): can be assigned to R2 or LO The
logic output is at state 1 if the motor current is greater than or
equal to the current threshold set by Ctd inthe adjust menu.Motor
thermal state reached (TSA): can be assignedThe logic output is at
state 1 if the motor thermal state iset by ttd in the adjust
menu.Drive thermal state reached (TAD): can be assigned The logic
output is at state 1 if the drive thermal state is gby dtd in the
adjust menu.Loss follower (APL): can be assigned to R2 or LOThe
logic output is at 1 if the signal on the 4-20 mA inpu
Analog output AO and AO1 appAnalog outputs AO and AO1 are
current outputs, from A
AOL and AOH can be configured between 0 and 20 m
Motor current (code OCR): the image of the motor rm AOH
corresponds to twice the drive nominal current. AOL corresponds to
zero current.
Motor frequency (code OFR): the motor frequency es AOH
corresponds to the maximum frequency (param AOL corresponds to zero
frequency.
Ramp output (code ORP): the image of the ramp outp AOH
corresponds to the maximum frequency (param AOL corresponds to zero
frequency.
Signed ramp (code ORS): the image of the ramp outp AOL
corresponds to the maximum frequency (param AOH corresponds to the
maximum frequency (param AOH + AOL corresponds to zero
frequency.
PI reference (code OPS): the image of the PI regulat AOL
corresponds to the minimum reference. AOH corresponds to the
maximum reference.
PI feedback (code OPF): the image of the PI regulato AOL
corresponds to the minimum feedback. AOH corresponds to the maximum
feedback.
Examples of AOL AOH: 0 - 20 mA4 - 20 mA20 - 4 mA
2 to R2 or LO s greater than or equal to the thermal state
threshold
to R2 or LO reater than or equal to the thermal state threshold
set
t is below 2 mA.
lication functions OL (mA) to AOH (mA), A.
s current.
timated by the drive. eter tFr).
ut frequency. eter tFr).
ut frequency and direction. eter tFr) in reverse direction.eter
tFr) in forward direction.
or reference.
r feedback.
-
Configurable I/O Application Functions
PI error (code OPE): the image of the PI regulator error as a %
of the sensor range (maximum feedback- minimum feedback). AOL
corresponds to the maximum error < 0. AOH corresponds to the
maximum error > 0. AOH + AOL corresponds to a zero error (OPE =
0).
PI integral (code OPI): the image of the PI regulator AOL
corresponds to a zero integral. AOH corresponds to a saturated
integral.
Motor power (code OPR): the image of the motor pow AOL
corresponds to 0% of the nominal motor power. AOH corresponds to
200% of the nominal motor pow
Motor thermal state (code THR): the image of the m AOL
corresponds to 0%. AOH corresponds to 200%.
Drive thermal state (code THD): the image of the driv AOL
corresponds to 0%. AOH corresponds to 200%.
2114
EN
GL
ISH
error integral.
er consumption.er.
otor thermal state, calculated.
e thermal state, calculated.
-
115
EN
GL
ISH
Fault Menu
This menu can be accessed when the switch is in position
.Modifications can only be made in stop mode with the drive
locked.
Code Description Factory setting
AAAAttttrrrr Auto Restart NoThis function is used to restart the
drive automAutomatic restarting is possible after the follow
- line overvoltage- DC bus overvoltage- external fault- motor
phase loss- serial link fault- communication fault- loss of 4-20 mA
signal- motor overload (condition: motor thermal- drive overheating
(condition: drive therma- motor overheating (condition:
resistance
When the function is activated, following appestays closed: the
drive attempts to start every drive unable to start (fault
present). If all 6 fail,relay open, until it is reset by being
switched o
This function requires the associated serestarting will not pose
any danger to
rrrrSSSStttt Reset Type
This function can be accessed if fault reset is areset (RSP),
general reset (RSG)Faults affected by a partial reset (rSt =
RSP)
- line overvoltage- motor overload- motor overheating- motor
phase loss- serial link fault- communication fault
- D- lo- o- d- e- o
Faults affected by a general reset (rSt = RSG): (forced
operation).To configure rSt = RSG:1 Display RSG2 Press the "ENT"
key3 The drive displays "See manual"4 Press then then "ENT"
OOOOPPPPLLLL OutPhaseLoss
Used to enable the motor phase loss fault. (Fadrive and the
motor). Choice Yes/No
IIIIPPPPLLLL InPhaseLoss
Used to enable the line phase loss fault (fault isbus). Choice
Yes/Noatically if the fault has disappeared (Yes/No option). ing
faults:
state less than 100%)l state less than 70%)
of probes less than 1,500 Ohms)arance of one or more of these
faults, the R1 relay 30 s. A maximum of 6 attempts are made with
the the drive remains locked definitively with the fault ff. quence
to be maintained. Ensure that accidental either equipment or
personnel .
RSPssigned to a logic input. 2 possible options: partial
C bus overvoltagess of 4-20 mAverhaulingrive overheatingxternal
faultverspeedall faults. The general reset actually inhibits all
faults
Yesult is eliminated if an isolator is used between the
Yes eliminated if there is a direct power supply via a DC
-
Fault Menu
Code Description Factory settingttttHHHHtttt ThermProType
ACL
Defines the type of indirect motor thermal protection provided
by the drive. If PTC probes are connected to the drive, this
function is not available. No thermal protection: N0: No
protectionSelf-cooled motor (ACL): the drive takes account of any
derating depending on the rotation frequency. Force-cooled motor
(FCL): the drivethe rotation frequency.
LLLLFFFFLLLL LossFollower
Used to enable the loss of 4-20 mA reference This fault can only
be configured if the AI2 min/mthan 3 mA or if CrL>CrH.
- No: no fault - Yes: immediate fault- Stt: stop according to
the Stt parameter, - LSF: stop according to the Stt parameter- LFF:
force to the fallback speed set by th- RLS: maintaining the speed
reached on a
fault, restarting when the signal returns.LLLLFFFFFFFF 4-20 Flt
Spd
Fallback speed in the event of loss of 4-20 mAAdjustment from 0
to HSP.
FFFFLLLLrrrr Catch On Fly
Used to enable a smooth restart after one of th- loss of line
supply or simple power off- fault reset or automatic restart-
freewheel stop or injection stop with logic- uncontrolled loss
downstream of the driv
Choice Yes/NoSSSSttttPPPP Cont. Stop
Controlled stop on a line phase loss. This funcIf IPL is set to
Yes, leave StP in position No. PNo: locking on loss of line sup