Embed Size (px)
Citation preview

Manual de Usuario
PRESENTACIÓN
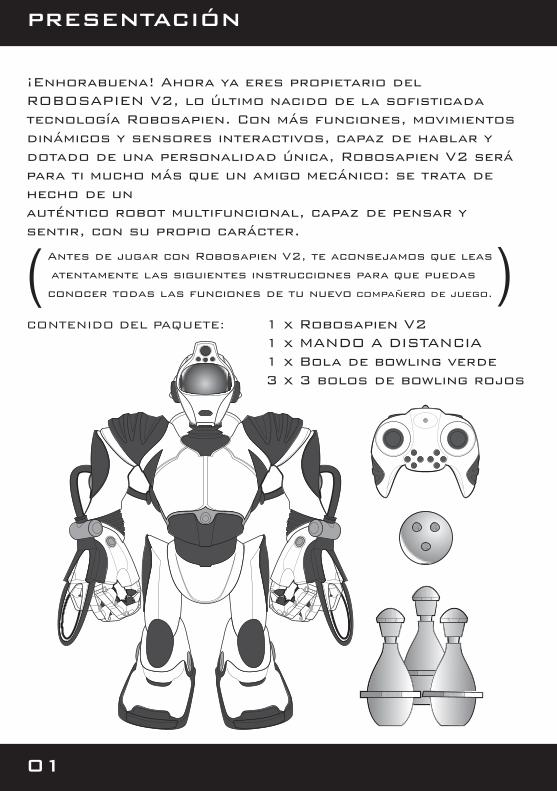
¡Enhorabuena! Ahora ya eres propietario del ROBOSAPIEN V2, lo último nacido de la sofisticada tecnología Robosapien. Con más funciones, movimientos dinámicos y sensores interactivos, capaz de hablar y dotado de una personalidad única, Robosapien V2 será para ti mucho más que un amigo mecánico: se trata de hecho de un auténtico robot multifuncional, capaz de pensar y sentir, con su propio carácter.
CONTENIDO DEL PAQUETE: 1 x Robosapien V2 1 x MANDO A DISTANCIA 1 x Bola de bowling verde 3 x 3 bolos de bowling rojos
01
Antes de jugar con Robosapien V2, te aconsejamos que leas
atentamente las siguientes instrucciones para que puedas
conocer todas las funciones de tu nuevo compañero de juego.
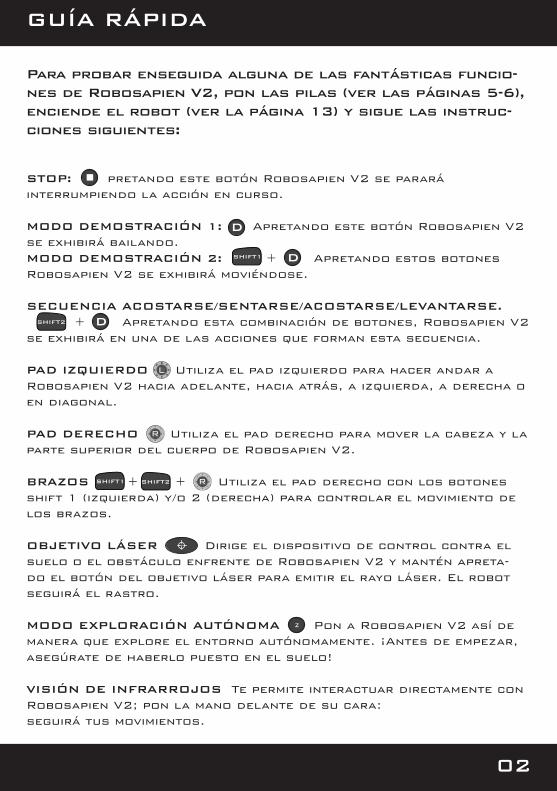
Para probar enseguida alguna de las fantásticas funcio-nes de Robosapien V2, pon las pilas (ver las páginas 5-6), enciende el robot (ver la página 13) y sigue las instruc-ciones siguientes:
STOP: pretando este botón Robosapien V2 se parará interrumpiendo la acción en curso.
MODO DEMOSTRACIÓN 1: Apretando este botón Robosapien V2 se exhibirá bailando.MODO DEMOSTRACIÓN 2: + Apretando estos botones Robosapien V2 se exhibirá moviéndose. SECUENCIA ACOSTARSE/SENTARSE/ACOSTARSE/LEVANTARSE. + Apretando esta combinación de botones, Robosapien V2 se exhibirá en una de las acciones que forman esta secuencia.
PAD IZQUIERDO Utiliza el pad izquierdo para hacer andar a Robosapien V2 hacia adelante, hacia atrás, a izquierda, a derecha o en diagonal.
PAD DERECHO Utiliza el pad derecho para mover la cabeza y la parte superior del cuerpo de Robosapien V2.
BRAZOS + + Utiliza el pad derecho con los botones shift 1 (izquierda) y/o 2 (derecha) para controlar el movimiento de los brazos.
OBJETIVO LÁSER Dirige el dispositivo de control contra el suelo o el obstáculo enfrente de Robosapien V2 y mantén apreta-do el botón del objetivo láser para emitir el rayo láser. El robot seguirá el rastro.
MODO EXPLORACIÓN AUTÓNOMA Pon a Robosapien V2 así de manera que explore el entorno autónomamente. ¡Antes de empezar, asegúrate de haberlo puesto en el suelo!
VISIÓN DE INFRARROJOS Te permite interactuar directamente con Robosapien V2; pon la mano delante de su cara: seguirá tus movimientos.
GUÍA RÁPIDA
L
02
R
R
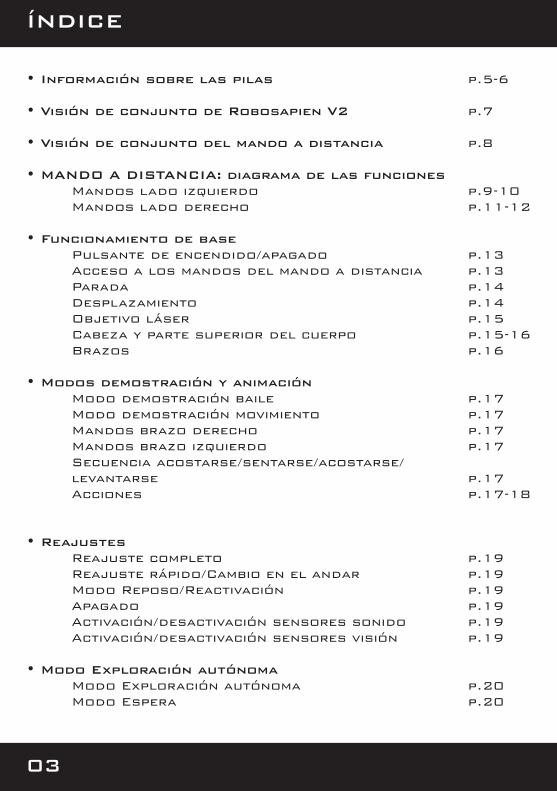
• Información sobre las pilas p.5-6
• Visión de conjunto de Robosapien V2 p.7 • Visión de conjunto del mando a distancia p.8
• MANDO A DISTANCIA: diagrama de las funciones Mandos lado izquierdo p.9-10 Mandos lado derecho p.11-12
• Funcionamiento de base Pulsante de encendido/apagado p.13 Acceso a los mandos del mando a distancia p.13 Parada p.14 Desplazamiento p.14 Objetivo láser p.15 Cabeza y parte superior del cuerpo p.15-16 Brazos p.16
• Modos demostración y animación Modo demostración baile p.17 Modo demostración movimiento p.17 Mandos brazo derecho p.17 Mandos brazo izquierdo p.17 Secuencia acostarse/sentarse/acostarse/ levantarse p.17 Acciones p.17-18
• Reajustes Reajuste completo p.19 Reajuste rápido/Cambio en el andar p.19 Modo Reposo/Reactivación p.19 Apagado p.19 Activación/desactivación sensores sonido p.19 Activación/desactivación sensores visión p.19
• Modo Exploración autónoma Modo Exploración autónoma p.20 Modo Espera p.20
ÍNDICE
03
• Sistemas de vision Activación/desactivación sistemas de visión p.21 Visión de infrarrojos de distancia cercana p.21 AdvertÊncia p.21 Respuesta vacilante p.22 Cómo evitar los obstáculos p.22
• Sensor cromático Reconocimiento de los colores p.23-25 Planteamientos del sensor cromático p.25 Relampagueo p.26
• Sensores de sonido Activación/desactivación sensores sonido p.26 Oído p.26-27 Sensores de inclinación p.27 Sensores de toma/recogida p.27-28 Sensores de los guantes p.29 Sensores de los pies p.29
• Programación Botones de programación p.30 Categorías del programa de posiciones p.30 Modo de programación de posiciones principal p.30-32 Modo de programación de posiciones a la izquierda y a la derecha p.32 Categorías de programación mando a distancia p.32 Modo de programación principal p.32-33 Salida del modo de programación p.33 Secuencias secundarias p.33-34 Modo de programación de sonido y visión p.34
• Modo Guardia p.35
• Interacción con otros robots Robosapien V2 p.36 Roboraptor p.37 Robopet p.37
• Notas importantes p.38
ÍNDICE
04
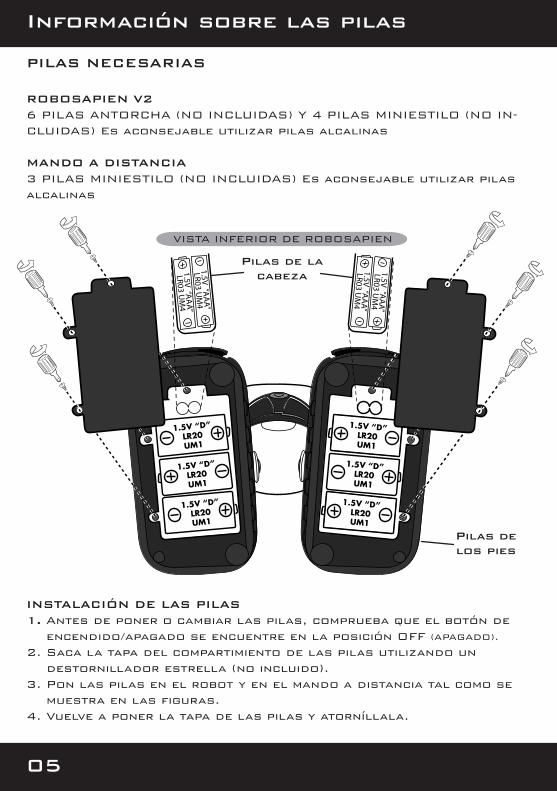
PILAS NECESARIAS
ROBOSAPIEN V26 PILAS ANTORCHA (NO INCLUIDAS) Y 4 PILAS MINIESTILO (NO IN-CLUIDAS) Es aconsejable utilizar pilas alcalinas
MANDO A DISTANCIA3 PILAS MINIESTILO (NO INCLUIDAS) Es aconsejable utilizar pilas alcalinas
Información sobre las pilas
INSTALACIÓN DE LAS PILAS1. Antes de poner o cambiar las pilas, comprueba que el botón de encendido/apagado se encuentre en la posición OFF (APAGADO).
2. Saca la tapa del compartimiento de las pilas utilizando un destornillador estrella (no incluido).3. Pon las pilas en el robot y en el mando a distancia tal como se muestra en las figuras.4. Vuelve a poner la tapa de las pilas y atorníllala.
VISTA INFERIOR DE ROBOSAPIEN
05
Pilas de la cabeza
Pilas de los pies
INFORMACIÓN IMPORTANTE SOBRE LAS PILAS:• Utiliza exclusivamente pilas del tipo y dimensiones especificadas.• No mezcles pilas viejas y nuevas, tipos de pilas distintos – alcalinas, normales (carbono-zinc) o recargables (níquel-cadmio) – o pilas recargables de diferente capacidad.• Saca las pilas recargables del producto antes de recargarlas.• Las pilas recargables deben recargarse bajo la supervisión de un adulto.• Pon las pilas con la correcta polaridad.• No recargues las pilas que no sean recargables.• No eches las pilas al fuego.• Cambia todas las pilas del mismo tipo/marca al mismo tiempo.• No provoques cortocircuitos entre los contactos de las pilas.• Saca las pilas gastadas del juguete.• Dada la presencia de componentes de pequeñas dimensiones, las pilas deben ser cambiadas por un adulto.• Saca las pilas del producto cuando este no se utilice.• Guarda el paquete: contiene información importante.
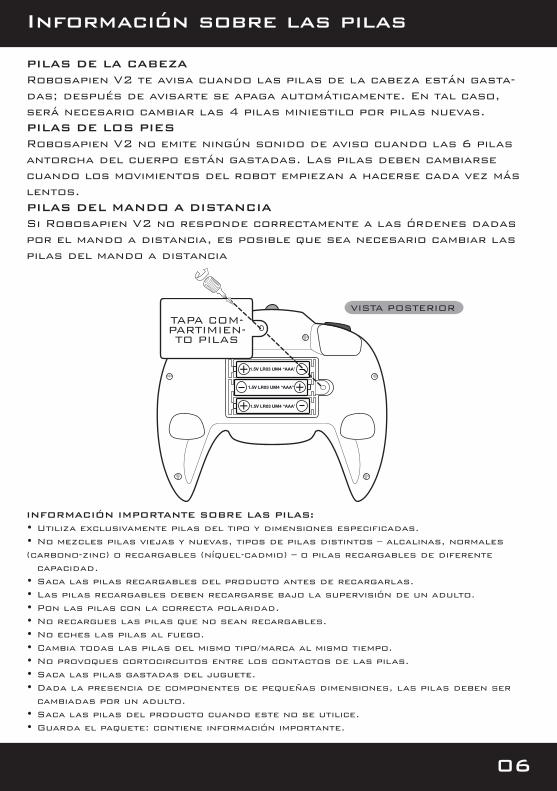
PILAS DE LA CABEZARobosapien V2 te avisa cuando las pilas de la cabeza están gasta-das; después de avisarte se apaga automáticamente. En tal caso, será necesario cambiar las 4 pilas miniestilo por pilas nuevas. PILAS DE LOS PIESRobosapien V2 no emite ningún sonido de aviso cuando las 6 pilas antorcha del cuerpo están gastadas. Las pilas deben cambiarse cuando los movimientos del robot empiezan a hacerse cada vez más lentos.PILAS DEL MANDO A DISTANCIASi Robosapien V2 no responde correctamente a las órdenes dadas por el mando a distancia, es posible que sea necesario cambiar las pilas del mando a distancia
VISTA POSTERIOR
Información sobre las pilas
06
TAPA COM-PARTIMIEN-TO PILAS
1.5V LR03 UM4 “AAA”
1.5V LR03 UM4 “AAA”
1.5V LR03 UM4 “AAA”
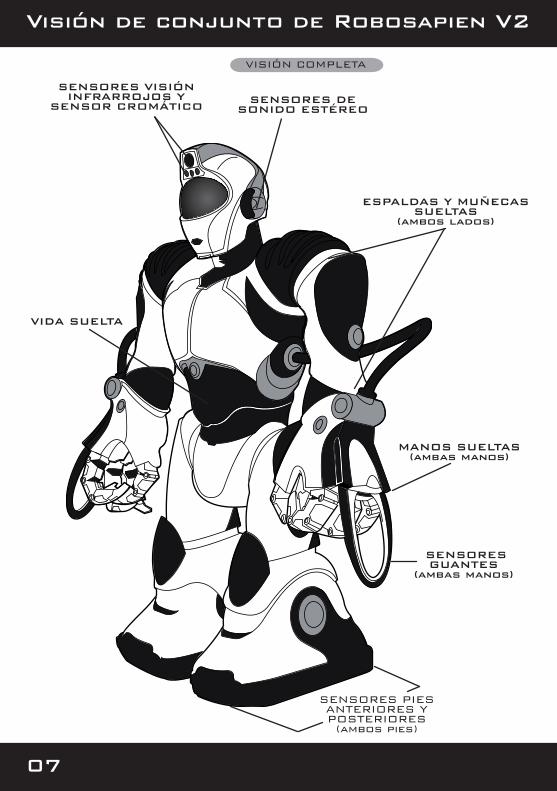
SENSORES DE SONIDO ESTÉREO
SENSORES VISIÓN INFRARROJOS Y
SENSOR CROMÁTICO
VISIÓN COMPLETA
SENSORES PIESANTERIORES Y POSTERIORES(ambos pies)
SENSORES GUANTES
(ambas manos)
MANOS SUELTAS(ambas manos)
Visión de conjunto de Robosapien V2
VIDA SUELTA
ESPALDAS Y MUÑECAS SUELTAS
(ambos lados)
07
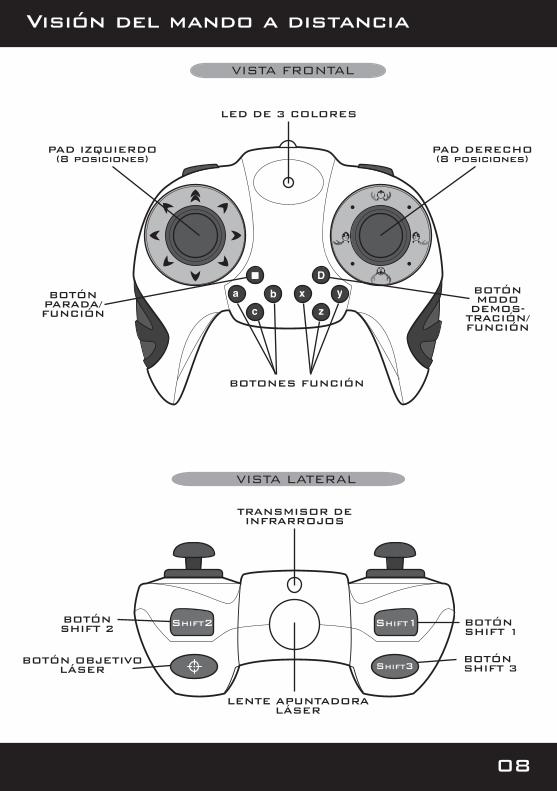
Visión del mando a distancia
BOTÓN SHIFT 3
LED DE 3 COLORES
BOTÓN OBJETIVO LÁSER
VISTA FRONTAL
LENTE APUNTADORA LÁSER
TRANSMISOR DE INFRARROJOS
BOTÓN MODO
DEMOS-TRACIÓN/FUNCIÓN
BOTÓN PARADA/FUNCIÓN
PAD DERECHO(8 posiciones)
BOTONES FUNCIÓN
BOTÓN SHIFT 1
BOTÓN SHIFT 2
PAD IZQUIERDO(8 posiciones)
08
VISTA LATERAL
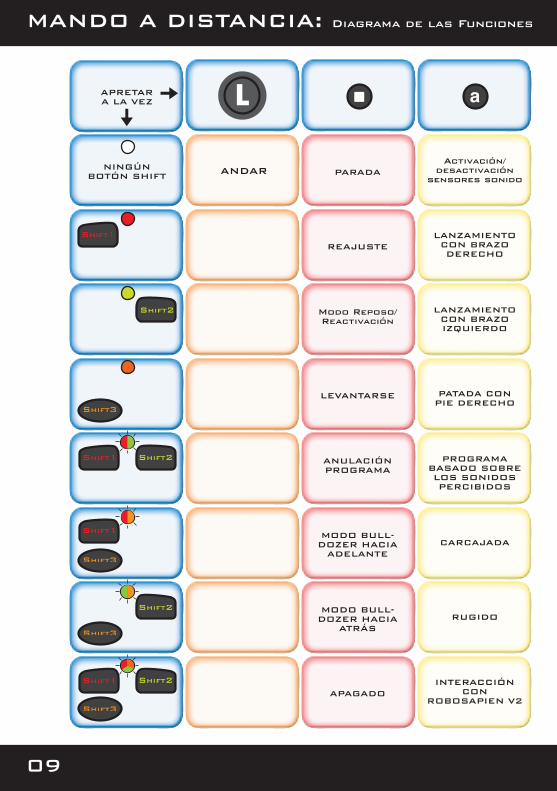
MANDO A DISTANCIA: Diagrama de las Funciones
09
SHIFT1
SHIFT3
SHIFT2
SHIFT1
SHIFT3
SHIFT2
SHIFT1
SHIFT3
SHIFT2
SHIFT1
SHIFT3
SHIFT2 SHIFT1
SHIFT3
SHIFT2
SHIFT1
SHIFT3
SHIFT2
SHIFT1
SHIFT3
SHIFT2
SHIFT1
SHIFT3
SHIFT2
SHIFT1
SHIFT3
SHIFT2
SHIFT1
SHIFT3
SHIFT2
SHIFT1
SHIFT3
SHIFT2
SHIFT1
SHIFT3
SHIFT2
APRETAR A LA VEZ
NINGÚN BOTÓN SHIFT ANDAR PARADA
REAJUSTE
Modo Reposo/Reactivación
LEVANTARSE
ANULACIÓN PROGRAMA
MODO BULL-DOZER HACIA
ADELANTE
MODO BULL-DOZER HACIA
ATRÁS
APAGADO
Activación/desactivación
sensores sonido
LANZAMIENTO CON BRAZO DERECHO
LANZAMIENTO CON BRAZO IZQUIERDO
PATADA CON PIE DERECHO
PROGRAMA BASADO SOBRE LOS SONIDOS PERCIBIDOS
CARCAJADA
RUGIDO
INTERACCIÓN CON
ROBOSAPIEN V2
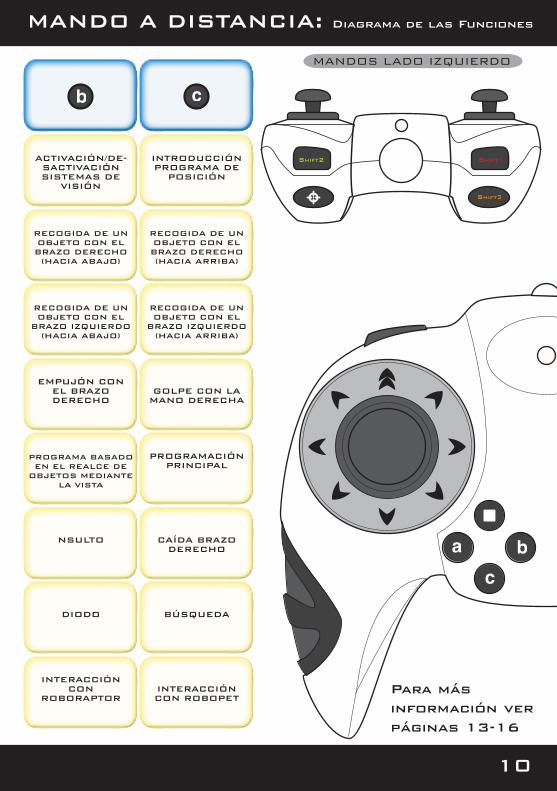
MANDO A DISTANCIA: Diagrama de las Funciones
MANDOS LADO IZQUIERDO
10
Para más información ver páginas 13-16
SHIFT1
SHIFT3
SHIFT2ACTIVACIÓN/DE-SACTIVACIÓN SISTEMAS DE
VISIÓN
RECOGIDA DE UN OBJETO CON EL BRAZO DERECHO (HACIA ABAJO)
RECOGIDA DE UN OBJETO CON EL
BRAZO IZQUIERDO (HACIA ABAJO)
EMPUJÓN CON EL BRAZO DERECHO
PROGRAMA BASADO EN EL REALCE DE
OBJETOS MEDIANTE LA VISTA
NSULTO
DIODO
INTERACCIÓN CON
ROBORAPTOR
INTRODUCCIÓN PROGRAMA DE
POSICIÓN
RECOGIDA DE UN OBJETO CON EL BRAZO DERECHO (HACIA ARRIBA)
RECOGIDA DE UN OBJETO CON EL
BRAZO IZQUIERDO (HACIA ARRIBA)
GOLPE CON LA MANO DERECHA
PROGRAMACIÓN PRINCIPAL
CAÍDA BRAZO DERECHO
BÚSQUEDA
INTERACCIÓN CON ROBOPET
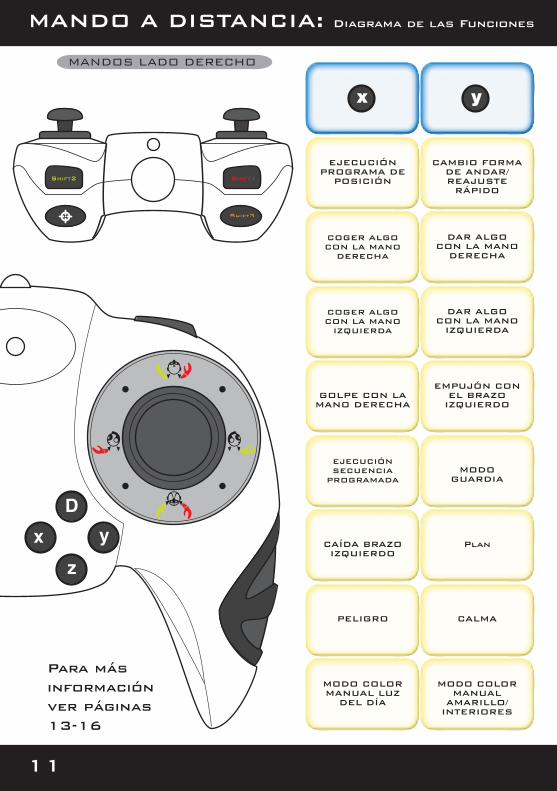
MANDO A DISTANCIA: Diagrama de las Funciones
MANDO A DISTANCIA: Diagrama de las Funciones
MANDOS LADO DERECHO
11
Para más información ver páginas 13-16
SHIFT1
SHIFT3
SHIFT2
EJECUCIÓN PROGRAMA DE
POSICIÓN
COGER ALGO CON LA MANO
DERECHA
COGER ALGO CON LA MANO
IZQUIERDA
GOLPE CON LA MANO DERECHA
EJECUCIÓN SECUENCIA
PROGRAMADA
CAÍDA BRAZO IZQUIERDO
PELIGRO
MODO COLOR MANUAL LUZ
DEL DÍA
CAMBIO FORMA DE ANDAR/REAJUSTE
RÁPIDO
DAR ALGO CON LA MANO
DERECHA
DAR ALGO CON LA MANO
IZQUIERDA
EMPUJÓN CON EL BRAZO IZQUIERDO
MODO GUARDIA
Plan
CALMA
MODO COLOR
MANUAL AMARILLO/
INTERIORES

MANDO A DISTANCIA: Diagrama de las Funciones
12
MODO EXPLORACIÓN
AUTÓNOMA
GIRO BRAZO DERECHO
GIRO BRAZO IZQUIERDO
PATADA CON EL PIE IZQUIERDO
ANULACIÓN INTRODUCCIÓN
CAMBIO RESERVA
ABRAZO
MODO COLOR MANUAL BLANCO/
INTERIORESe
MODO DEMOSTRACIÓN
BAILE
MODO DEMOS-TRACIÓN
MOVIMIENTO
SECUENCIA ACOSTARSE/SENTARSE/
ACOSTARSE/LEVANTARSE
OOPS! (¡HUY!)
5 EN ALTO
HEY BABY (EH MUÑECA)
ERUCTO
NO APRETAR
CABEZA Y PARTE SUPERIOR
DEL CUERPO
BRAZO DERECHO
BRAZO IZQUIERDO
INCLINACIÓN FLANCOS
AMBOS BRAZOS
SOLO CABEZA
CABEZA Y PARTE SUPERIOR DEL
CUERPO
SOLO PARTE SUPERIOR DEL
CUERPO
SHIFT1
SHIFT3
SHIFT2
SHIFT1
SHIFT3
SHIFT2
SHIFT1
SHIFT3
SHIFT2
APRETAR A LA VEZ
NINGÚN BOTÓN SHIFT
SHIFT1
SHIFT3
SHIFT2
SHIFT1
SHIFT3
SHIFT2
SHIFT1
SHIFT3
SHIFT2
SHIFT1
SHIFT3
SHIFT2 SHIFT1
SHIFT3
SHIFT2
SHIFT1
SHIFT3
SHIFT2
SHIFT1
SHIFT3
SHIFT2
SHIFT1
SHIFT3
SHIFT2
SHIFT1
SHIFT3
SHIFT2
Funcionamiento de Base
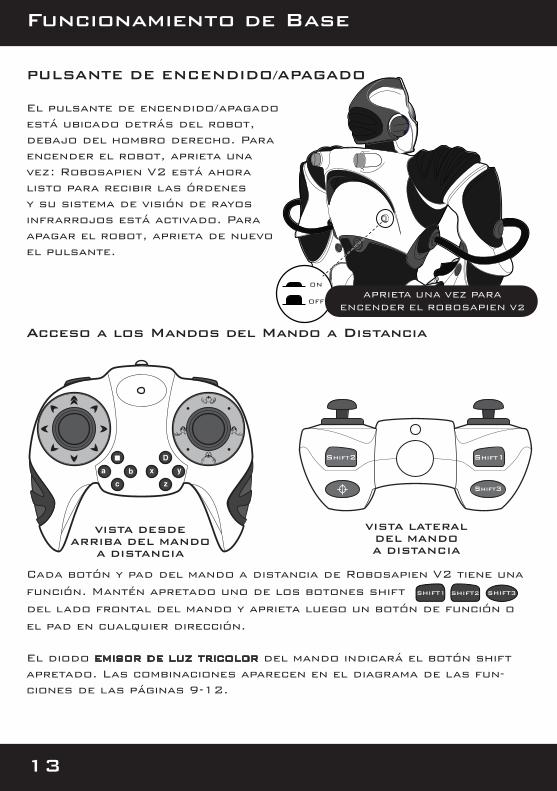
PULSANTE DE ENCENDIDO/APAGADO
Acceso a los Mandos del Mando a Distancia
Cada botón y pad del mando a distancia de Robosapien V2 tiene una
función. Mantén apretado uno de los botones shift
del lado frontal del mando y aprieta luego un botón de función o
el pad en cualquier dirección.
El diodo emisor de luz tricolor del mando indicará el botón shift apretado. Las combinaciones aparecen en el diagrama de las fun-ciones de las páginas 9-12.
El pulsante de encendido/apagado está ubicado detrás del robot, debajo del hombro derecho. Para encender el robot, aprieta una vez: Robosapien V2 está ahora listo para recibir las órdenes y su sistema de visión de rayos infrarrojos está activado. Para apagar el robot, aprieta de nuevo el pulsante.
13
VISTA DESDE ARRIBA DEL MANDO
A DISTANCIA
VISTA LATERAL DEL MANDO A DISTANCIA
APRIETA UNA VEZ PARA ENCENDER EL ROBOSAPIEN V2
Funcionamiento de Base
= ParadaPara detener a Robosapien V2 mientras está ejecutando una acción, aprieta el botón STOP (PARADA) en cualquier momento y mantenlo apretado durante 2 segundos. Robosapien V2 volverá a la posición del cuerpo predefinida.
= Desplazamiento El desplazamiento del robot en las diversas direcciones se contro-la desde el pad izquierdo.
= Desplazamiento hacia adelanteAprieta el botón adelante del pad izquierdo una vez para hacer an-dar a Robosapien V2 hacia delante.
Aprieta de nuevo el mismo botón para hacer andar el robot con pasos más cortos.shorter steps.
= Cambio en la forma de andar (mientras camina)Robosapien V2 se caracteriza por cuatro distintos modos de andar. Cada vez que se aprieta este botón, empezará a caminar utilizando la manera de andar sucesiva.
+ + = Modo bulldozer hacia adelanteNormalmente Robosapien V2 evita los obstáculos utilizando la visión de rayos infrarrojos y los sensores táctiles, pero si se le pone en modo bulldozer, irá adelante por su camino sin tener en cuenta con lo que se topa.
+ + = Modo bulldozer hacia atrásCon esta combinación Robosapien V2 caminará hacia atrás sin preo-cuparse de los posibles obstáculos que se encuentre en su camino.
NOTA: El movimiento de Robosapien V2 está influenciado por el tipo de superficie sobre la cual se le haga andar o por el hecho que transporte objetos más o menos pesados. En caso de emergencia es posible detener el robot sin tener que recurrir al mando a distancia, activando su reflejo de vacilación (ver Sistemas de visión de las páginas 21-22).
NOTA: controla a Robosapien V2 como si se tratase de tu propia imagen reflejada en un espejo. Shift 1 izquierdo para su lado derecho y shift 2 derecho para su lado izquierdo.Left shift 1 for his right side and right shift 2 for his left side.
L
14
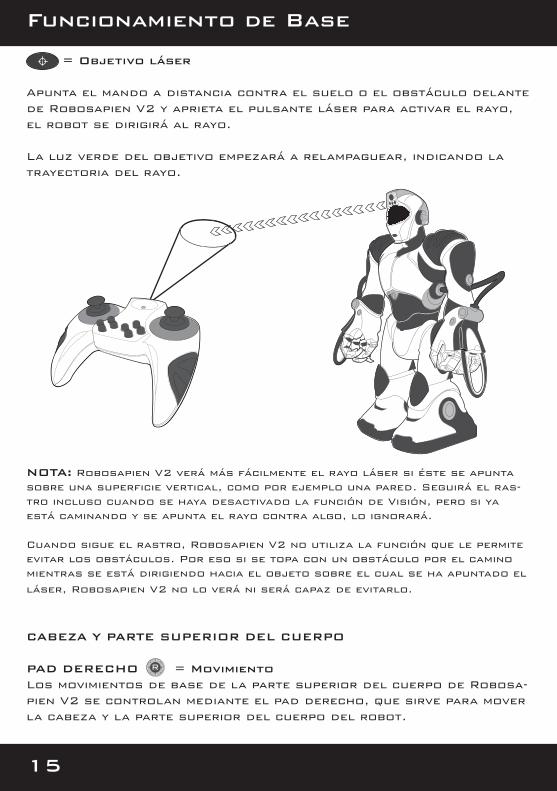
= Objetivo láser
Apunta el mando a distancia contra el suelo o el obstáculo delante de Robosapien V2 y aprieta el pulsante láser para activar el rayo, el robot se dirigirá al rayo.
La luz verde del objetivo empezará a relampaguear, indicando la trayectoria del rayo.
NOTA: Robosapien V2 verá más fácilmente el rayo láser si éste se apunta sobre una superficie vertical, como por ejemplo una pared. Seguirá el ras-tro incluso cuando se haya desactivado la función de Visión, pero si ya está caminando y se apunta el rayo contra algo, lo ignorará.
Cuando sigue el rastro, Robosapien V2 no utiliza la función que le permite evitar los obstáculos. Por eso si se topa con un obstáculo por el camino mientras se está dirigiendo hacia el objeto sobre el cual se ha apuntado el
láser, Robosapien V2 no lo verá ni será capaz de evitarlo.
CABEZA Y PARTE SUPERIOR DEL CUERPO
PAD DERECHO = MovimientoLos movimientos de base de la parte superior del cuerpo de Robosa-pien V2 se controlan mediante el pad derecho, que sirve para mover la cabeza y la parte superior del cuerpo del robot.
R
Funcionamiento de Base
15
NOTA: la cabeza se girará en su posición extrema antes que el cuerpo la siga.
IMPORTANTE: las manos de Robosapien V2 se abren en la dirección hacia la cual está dirigida su cabeza. Cuando el robot gira la cabeza, una mano se abre mientras la otra se cierra. + = CADERAS Y CINTURALas caderas de Robosapien V2 se pueden mover hacia delante y hacia atrás, mientras que la cintura se puede mover de un lado a otro. Apretando el pad en diagonal es posible controlar ambas al mismo tiempo.
+ + = SÓLO CABEZAEsta combinación permite mover solo la cabeza sin el cuerpo. + + + = SÓLO PARTE SUPERIOR DEL CUERPOEsta combinación permite girar la parte superior del cuerpo manteniendo quieta la cabeza.
BRAZOSCuando se controlan los brazos de Robosapien V2, los botones Arriba y Abajo mueven las espaldas, los botones Derecha e Izquier-da mueven las muñecas, y si se aprieta el pad en diagonal es posible controlar ambos al mismo tiempo.
+ = MOVIMIENTOS BRAZO DERECHOEsta combinación permite mover autónomamente el brazo derecho. + = MOVIMIENTOS BRAZO IZQUIERDOEsta combinación permite mover autónomamente el brazo izquierdo.
+ + = AMBOS BRAZOSEsta combinación permite mover al mismo tiempo los dos brazos.
NOTA: cuando se controlan ambos brazos, las dos muñecas se moverán hacia dentro o hacia fuera juntas, pero no a la derecha o a la izquierda juntas.
RR
R
R
R
R
R
Funcionamiento de Base
16
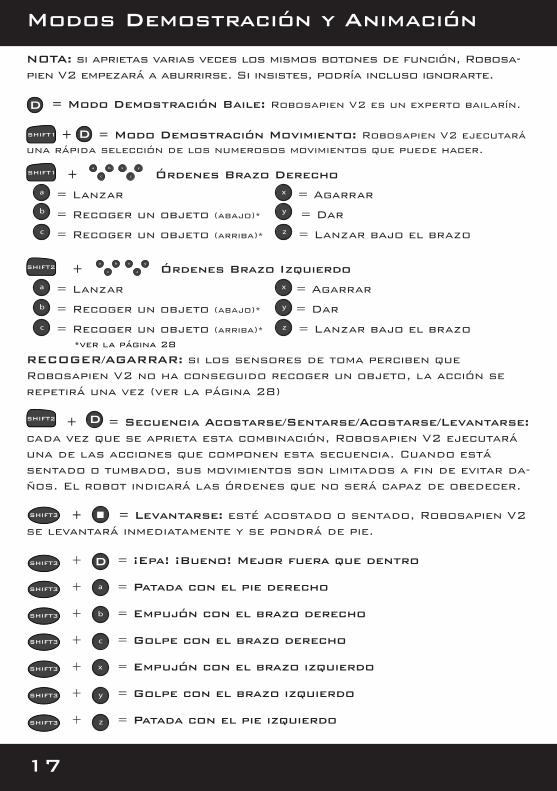
NOTA: si aprietas varias veces los mismos botones de función, Robosa-pien V2 empezará a aburrirse. Si insistes, podría incluso ignorarte.
= Modo Demostración Baile: Robosapien V2 es un experto bailarín.
+ = Modo Demostración Movimiento: Robosapien V2 ejecutará una rápida selección de los numerosos movimientos que puede hacer.
+ Órdenes Brazo Derecho
= Lanzar = Agarrar
= Recoger un objeto (abajo)* = Dar
= Recoger un objeto (arriba)* = Lanzar bajo el brazo
+ Órdenes Brazo Izquierdo
= Lanzar = Agarrar
= Recoger un objeto (abajo)* = Dar
= Recoger un objeto (arriba)* = Lanzar bajo el brazo *ver la página 28
RECOGER/AGARRAR: si los sensores de toma perciben que Robosapien V2 no ha conseguido recoger un objeto, la acción se repetirá una vez (ver la página 28) + = Secuencia Acostarse/Sentarse/Acostarse/Levantarse: cada vez que se aprieta esta combinación, Robosapien V2 ejecutará una de las acciones que componen esta secuencia. Cuando está sentado o tumbado, sus movimientos son limitados a fin de evitar da-ños. El robot indicará las órdenes que no será capaz de obedecer.
+ = Levantarse: esté acostado o sentado, Robosapien V2 se levantará inmediatamente y se pondrá de pie.
+ = ¡Epa! ¡Bueno! Mejor fuera que dentro
+ = Patada con el pie derecho
+ = Empujón con el brazo derecho
+ = Golpe con el brazo derecho
+ = Empujón con el brazo izquierdo
+ = Golpe con el brazo izquierdo
+ = Patada con el pie izquierdo
Modos Demostración y Animación
17

Modos Demostración y Animación
+ + = Brazo derecho, se dobla, cae
+ + = Brazo izquierdo, se dobla, cae
+ + = ¡Choca esos 5!Alguien no puede contar
+ + = ¡Eh muñeca!Escucha y aprende amigo mio
+ + = Carcajada¿Me he perdido algo?
+ + = Insulto¿Te dirigirías así a tu ficha madre ?
+ + = Plan¡No nos culpéis por las posibles consecuencias!
+ + = Cambio de repuestoNo le des lo que pide
+ + = EructoLas viejas costumbres cuestan erradicarlas
+ + = Rugido¡Hay alguien que se encuentra a tope de cargado!
+ + = Diodo¿Acaso te lo ha enseñado tu programador?
+ + = Búsqueda¿Qué te parece si tomamos algo fresco?
+ + = Guardián¡Que no cunda el pánico!
+ + = TranquiloRobosapien V2 en control
+ + = AbrazoTambién los robots necesitan mimos
18
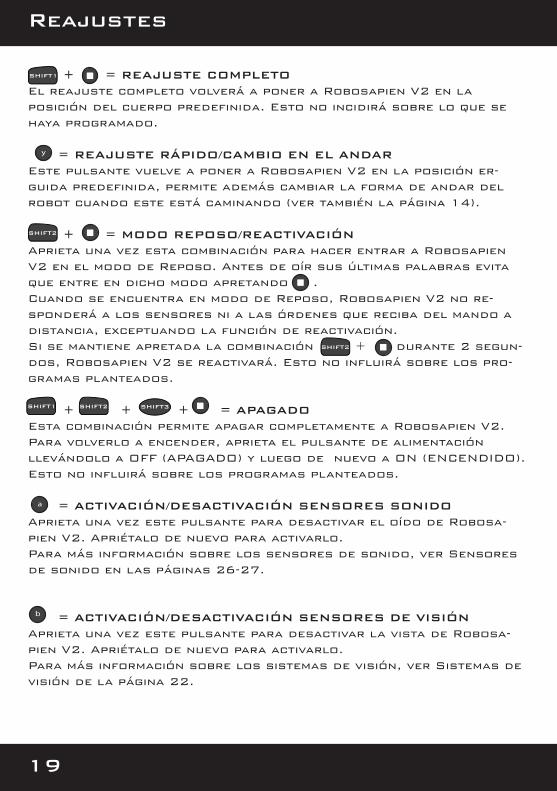
+ = REAJUSTE COMPLETOEl reajuste completo volverá a poner a Robosapien V2 en la posición del cuerpo predefinida. Esto no incidirá sobre lo que se haya programado.
= REAJUSTE RÁPIDO/CAMBIO EN EL ANDAREste pulsante vuelve a poner a Robosapien V2 en la posición er-guida predefinida, permite además cambiar la forma de andar del robot cuando este está caminando (ver también la página 14).
+ = MODO REPOSO/REACTIVACIÓNAprieta una vez esta combinación para hacer entrar a Robosapien V2 en el modo de Reposo. Antes de oír sus últimas palabras evita que entre en dicho modo apretando .Cuando se encuentra en modo de Reposo, Robosapien V2 no re-sponderá a los sensores ni a las órdenes que reciba del mando a distancia, exceptuando la función de reactivación.Si se mantiene apretada la combinación + durante 2 segun-dos, Robosapien V2 se reactivará. Esto no influirá sobre los pro-gramas planteados.
+ + + = APAGADOEsta combinación permite apagar completamente a Robosapien V2. Para volverlo a encender, aprieta el pulsante de alimentación llevándolo a OFF (APAGADO) y luego de nuevo a ON (ENCENDIDO). Esto no influirá sobre los programas planteados.
= ACTIVACIÓN/DESACTIVACIÓN SENSORES SONIDOAprieta una vez este pulsante para desactivar el oído de Robosa-pien V2. Apriétalo de nuevo para activarlo.Para más información sobre los sensores de sonido, ver Sensores de sonido en las páginas 26-27.
= ACTIVACIÓN/DESACTIVACIÓN SENSORES DE VISIÓNAprieta una vez este pulsante para desactivar la vista de Robosa-pien V2. Apriétalo de nuevo para activarlo.Para más información sobre los sistemas de visión, ver Sistemas de visión de la página 22.
Reajustes
19
Reajustes
20
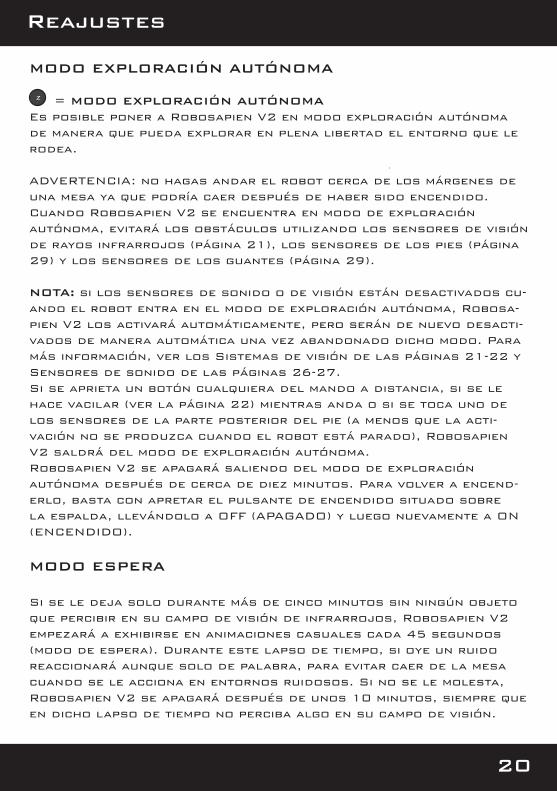
MODO EXPLORACIÓN AUTÓNOMA
= MODO EXPLORACIÓN AUTÓNOMAEs posible poner a Robosapien V2 en modo exploración autónoma de manera que pueda explorar en plena libertad el entorno que le rodea.
ADVERTENCIA: no hagas andar el robot cerca de los márgenes de una mesa ya que podría caer después de haber sido encendido.Cuando Robosapien V2 se encuentra en modo de exploración autónoma, evitará los obstáculos utilizando los sensores de visión de rayos infrarrojos (página 21), los sensores de los pies (página 29) y los sensores de los guantes (página 29).
NOTA: si los sensores de sonido o de visión están desactivados cu-ando el robot entra en el modo de exploración autónoma, Robosa-pien V2 los activará automáticamente, pero serán de nuevo desacti-vados de manera automática una vez abandonado dicho modo. Para más información, ver los Sistemas de visión de las páginas 21-22 y Sensores de sonido de las páginas 26-27.Si se aprieta un botón cualquiera del mando a distancia, si se le hace vacilar (ver la página 22) mientras anda o si se toca uno de los sensores de la parte posterior del pie (a menos que la acti-vación no se produzca cuando el robot está parado), Robosapien V2 saldrá del modo de exploración autónoma.Robosapien V2 se apagará saliendo del modo de exploración autónoma después de cerca de diez minutos. Para volver a encend-erlo, basta con apretar el pulsante de encendido situado sobre la espalda, llevándolo a OFF (APAGADO) y luego nuevamente a ON (ENCENDIDO).
MODO ESPERA
Si se le deja solo durante más de cinco minutos sin ningún objeto que percibir en su campo de visión de infrarrojos, Robosapien V2 empezará a exhibirse en animaciones casuales cada 45 segundos (modo de espera). Durante este lapso de tiempo, si oye un ruido reaccionará aunque solo de palabra, para evitar caer de la mesa cuando se le acciona en entornos ruidosos. Si no se le molesta, Robosapien V2 se apagará después de unos 10 minutos, siempre que en dicho lapso de tiempo no perciba algo en su campo de visión.
21
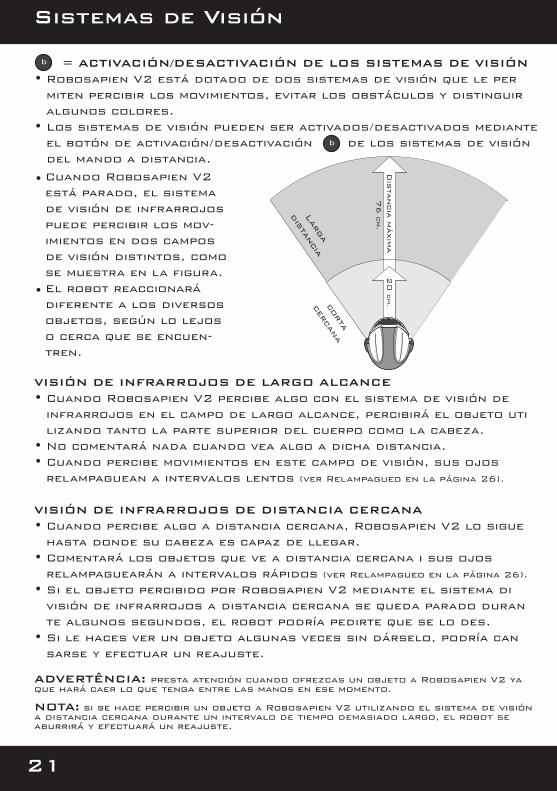
= ACTIVACIÓN/DESACTIVACIÓN DE LOS SISTEMAS DE VISIÓN• Robosapien V2 está dotado de dos sistemas de visión que le per miten percibir los movimientos, evitar los obstáculos y distinguir algunos colores. • Los sistemas de visión pueden ser activados/desactivados mediante el botón de activación/desactivación de los sistemas de visión del mando a distancia.
VISIÓN DE INFRARROJOS DE LARGO ALCANCE• Cuando Robosapien V2 percibe algo con el sistema de visión de infrarrojos en el campo de largo alcance, percibirá el objeto uti lizando tanto la parte superior del cuerpo como la cabeza. • No comentará nada cuando vea algo a dicha distancia. • Cuando percibe movimientos en este campo de visión, sus ojos relampaguean a intervalos lentos (ver Relampagueo en la página 26).
VISIÓN DE INFRARROJOS DE DISTANCIA CERCANA• Cuando percibe algo a distancia cercana, Robosapien V2 lo sigue hasta donde su cabeza es capaz de llegar. • Comentará los objetos que ve a distancia cercana i sus ojos relampaguearán a intervalos rápidos (ver Relampagueo en la página 26).
• Si el objeto percibido por Robosapien V2 mediante el sistema di visión de infrarrojos a distancia cercana se queda parado duran te algunos segundos, el robot podría pedirte que se lo des. • Si le haces ver un objeto algunas veces sin dárselo, podría can sarse y efectuar un reajuste.
ADVERTÊNCIA: presta atención cuando ofrezcas un objeto a Robosapien V2 ya que hará caer lo que tenga entre las manos en ese momento.
NOTA: si se hace percibir un objeto a Robosapien V2 utilizando el sistema de visión a distancia cercana durante un intervalo de tiempo demasiado largo, el robot se aburrirá y efectuará un reajuste.
Sistemas de Visión
Cuando Robosapien V2 está parado, el sistema de visión de infrarrojos puede percibir los mov-imientos en dos campos de visión distintos, como se muestra en la figura.El robot reaccionará diferente a los diversos objetos, según lo lejos o cerca que se encuen-tren.
Larg
a
dista
ncia
Dis
tancia
máxim
a 7
6 c
m.
corta
cercana
20 c
m.
•
•
22
RESPUESTA VACILANTE
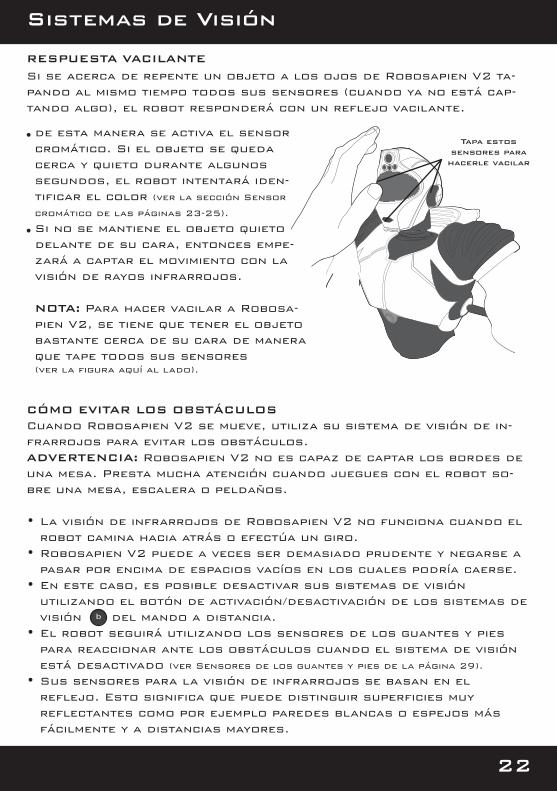
CÓMO EVITAR LOS OBSTÁCULOSCuando Robosapien V2 se mueve, utiliza su sistema de visión de in-frarrojos para evitar los obstáculos. ADVERTENCIA: Robosapien V2 no es capaz de captar los bordes de una mesa. Presta mucha atención cuando juegues con el robot so-bre una mesa, escalera o peldaños.
• La visión de infrarrojos de Robosapien V2 no funciona cuando el robot camina hacia atrás o efectúa un giro.• Robosapien V2 puede a veces ser demasiado prudente y negarse a pasar por encima de espacios vacíos en los cuales podría caerse.• En este caso, es posible desactivar sus sistemas de visión utilizando el botón de activación/desactivación de los sistemas de visión del mando a distancia.• El robot seguirá utilizando los sensores de los guantes y pies para reaccionar ante los obstáculos cuando el sistema de visión está desactivado (ver Sensores de los guantes y pies de la página 29).
• Sus sensores para la visión de infrarrojos se basan en el reflejo. Esto significa que puede distinguir superficies muy reflectantes como por ejemplo paredes blancas o espejos más fácilmente y a distancias mayores.
Sistemas de Visión
de esta manera se activa el sensor cromático. Si el objeto se queda cerca y quieto durante algunos segundos, el robot intentará iden-tificar el color (ver la sección Sensor
cromático de las páginas 23-25). Si no se mantiene el objeto quieto delante de su cara, entonces empe-zará a captar el movimiento con la visión de rayos infrarrojos.
NOTA: Para hacer vacilar a Robosa-pien V2, se tiene que tener el objeto bastante cerca de su cara de manera que tape todos sus sensores (ver la figura aquí al lado).
Si se acerca de repente un objeto a los ojos de Robosapien V2 ta-pando al mismo tiempo todos sus sensores (cuando ya no está cap-tando algo), el robot responderá con un reflejo vacilante.
Tapa estos sensores para hacerle vacilar
•
•
= ACTIVACIÓN/DESACTIVACIÓN DE LOS SISTEMAS DE VISIÓN• Robosapien V2 está dotado de dos sistemas de visión que le per miten percibir los movimientos, evitar los obstáculos y distinguir algunos colores. • Los sistemas de visión pueden ser activados/desactivados mediante el botón de activación/desactivación de los sistemas de visión del mando a distancia.
VISIÓN DE INFRARROJOS DE LARGO ALCANCE• Cuando Robosapien V2 percibe algo con el sistema de visión de infrarrojos en el campo de largo alcance, percibirá el objeto uti lizando tanto la parte superior del cuerpo como la cabeza. • No comentará nada cuando vea algo a dicha distancia. • Cuando percibe movimientos en este campo de visión, sus ojos relampaguean a intervalos lentos (ver Relampagueo en la página 26).
VISIÓN DE INFRARROJOS DE DISTANCIA CERCANA• Cuando percibe algo a distancia cercana, Robosapien V2 lo sigue hasta donde su cabeza es capaz de llegar. • Comentará los objetos que ve a distancia cercana i sus ojos relampaguearán a intervalos rápidos (ver Relampagueo en la página 26).
• Si el objeto percibido por Robosapien V2 mediante el sistema di visión de infrarrojos a distancia cercana se queda parado duran te algunos segundos, el robot podría pedirte que se lo des. • Si le haces ver un objeto algunas veces sin dárselo, podría can sarse y efectuar un reajuste.
ADVERTÊNCIA: presta atención cuando ofrezcas un objeto a Robosapien V2 ya que hará caer lo que tenga entre las manos en ese momento.
NOTA: si se hace percibir un objeto a Robosapien V2 utilizando el sistema de visión a distancia cercana durante un intervalo de tiempo demasiado largo, el robot se aburrirá y efectuará un reajuste.
Sensor Cromático
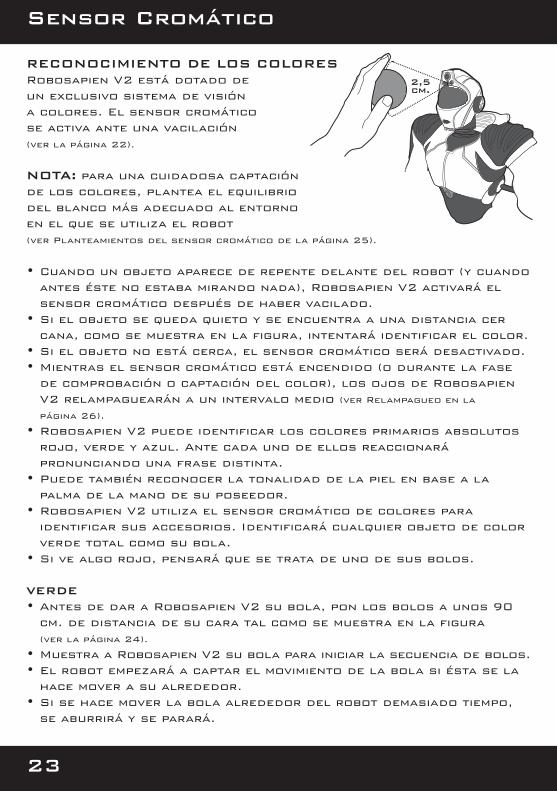
RECONOCIMIENTO DE LOS COLORESRobosapien V2 está dotado de un exclusivo sistema de visión a colores. El sensor cromático se activa ante una vacilación (ver la página 22).
NOTA: para una cuidadosa captación de los colores, plantea el equilibrio del blanco más adecuado al entorno en el que se utiliza el robot (ver Planteamientos del sensor cromático de la página 25).
• Cuando un objeto aparece de repente delante del robot (y cuando antes éste no estaba mirando nada), Robosapien V2 activará el sensor cromático después de haber vacilado.• Si el objeto se queda quieto y se encuentra a una distancia cer cana, como se muestra en la figura, intentará identificar el color.• Si el objeto no está cerca, el sensor cromático será desactivado.• Mientras el sensor cromático está encendido (o durante la fase de comprobación o captación del color), los ojos de Robosapien V2 relampaguearán a un intervalo medio (ver Relampagueo en la
página 26).
• Robosapien V2 puede identificar los colores primarios absolutos rojo, verde y azul. Ante cada uno de ellos reaccionará pronunciando una frase distinta.• Puede también reconocer la tonalidad de la piel en base a la palma de la mano de su poseedor.• Robosapien V2 utiliza el sensor cromático de colores para identificar sus accesorios. Identificará cualquier objeto de color verde total como su bola.• Si ve algo rojo, pensará que se trata de uno de sus bolos.
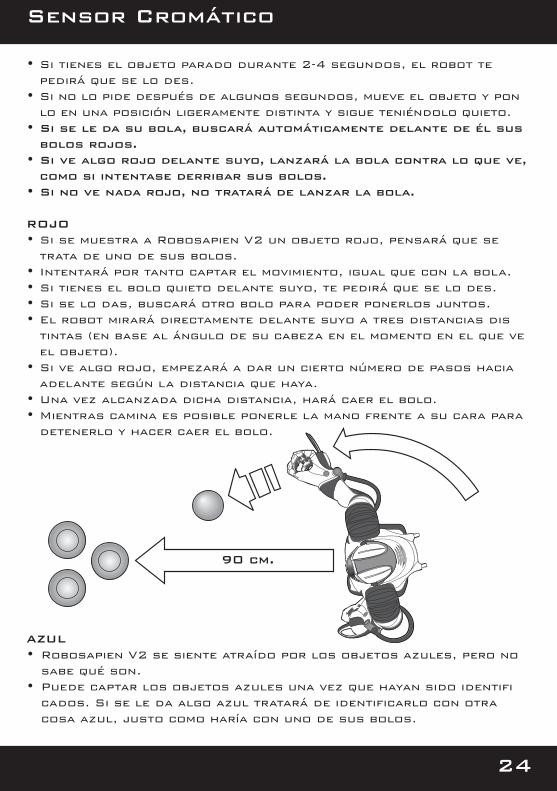
VERDE• Antes de dar a Robosapien V2 su bola, pon los bolos a unos 90 cm. de distancia de su cara tal como se muestra en la figura (ver la página 24).
• Muestra a Robosapien V2 su bola para iniciar la secuencia de bolos.• El robot empezará a captar el movimiento de la bola si ésta se la hace mover a su alrededor.• Si se hace mover la bola alrededor del robot demasiado tiempo, se aburrirá y se parará.
23
2,5 cm.
Sensor Cromático
24
• Si tienes el objeto parado durante 2-4 segundos, el robot te pedirá que se lo des.• Si no lo pide después de algunos segundos, mueve el objeto y pon lo en una posición ligeramente distinta y sigue teniéndolo quieto.• Si se le da su bola, buscará automáticamente delante de él sus bolos rojos.• Si ve algo rojo delante suyo, lanzará la bola contra lo que ve, como si intentase derribar sus bolos.• Si no ve nada rojo, no tratará de lanzar la bola.
ROJO• Si se muestra a Robosapien V2 un objeto rojo, pensará que se trata de uno de sus bolos.• Intentará por tanto captar el movimiento, igual que con la bola.• Si tienes el bolo quieto delante suyo, te pedirá que se lo des.• Si se lo das, buscará otro bolo para poder ponerlos juntos.• El robot mirará directamente delante suyo a tres distancias dis tintas (en base al ángulo de su cabeza en el momento en el que ve el objeto).• Si ve algo rojo, empezará a dar un cierto número de pasos hacia adelante según la distancia que haya. • Una vez alcanzada dicha distancia, hará caer el bolo.• Mientras camina es posible ponerle la mano frente a su cara para detenerlo y hacer caer el bolo.
AZUL• Robosapien V2 se siente atraído por los objetos azules, pero no sabe qué son.• Puede captar los objetos azules una vez que hayan sido identifi cados. Si se le da algo azul tratará de identificarlo con otra cosa azul, justo como haría con uno de sus bolos.
90 cm.
Sensor Cromático
TONALIDAD DE LA PIEL• Robosapien V2 puede identificar la tonalidad de la piel si se pone la palma de la mano delante de su cara después de una vacilación.• Tras la identificación, captará el movimiento del objeto de la misma tonalidad de la piel más grande delante de él.• Si agitas la mano delante de él un rato, creerá que lo estás salu dando y responderá al saludo.• No obstante, si insistes demasiado se aburrirá y dejará de saludar.• Si en cambio tienes la mano quieta, pensará que quieres darle la mano y te dará su mano.
PLANTEAMIENTOS DEL SENSOR CROMÁTICOEn determinadas condiciones de iluminación, el sensor cromático de Robosapien V2 puede tener alguna dificultad para reconocer algu-nos colores, sobre todo en el caso de las tonalidades de la piel. Es posible modificar manualmente el planteamiento del equilibrio del blanco utilizando las combinaciones de los botones shift/bo-tones color listadas aquí debajo.
+ + + = Luz del día
• fuente de iluminación dominante es la luz natural del sol.
+ + + = Amarillo Interiores
• si la fuente de iluminación dominante es una luz artificial al
tungsteno (por ejemplo las lámparas que normalmente se usan en casa)
+ + + = Blanco Interiores
• si la fuente de iluminación dominante es una luz artificial que
tiende al blanco (lámparas fluorescentes, neón, etc.)
• El planteamiento predefinido para Robosapien V2 es Amarillo Interiores.
Notas acerca del sensor cromático:• Cuando Robosapien V2 capta objetos de color, reaccionará ante el objeto más grande del color correcto. Cuidado con los trasfondos de color, ya que podrían interferir en el funciona- miento del sensor cromático.• Si la iluminación es demasiado escasa, Robosapien V2 desactivará el sensor cromático después de una vacilación e indicará que no hay suficiente luz.• Una luz solar demasiado fuerte y superficies excesivamente re flectantes podrían interferir en la identificación de los colores.• El sensor cromático de Robosapien V2 puede tener dificultades en reconocer los colores si las pilas puestas en la cabeza del robot están gastadas. Esto podría resultar evidente incluso antes que el robot advierta que las pilas están gastadas.
25
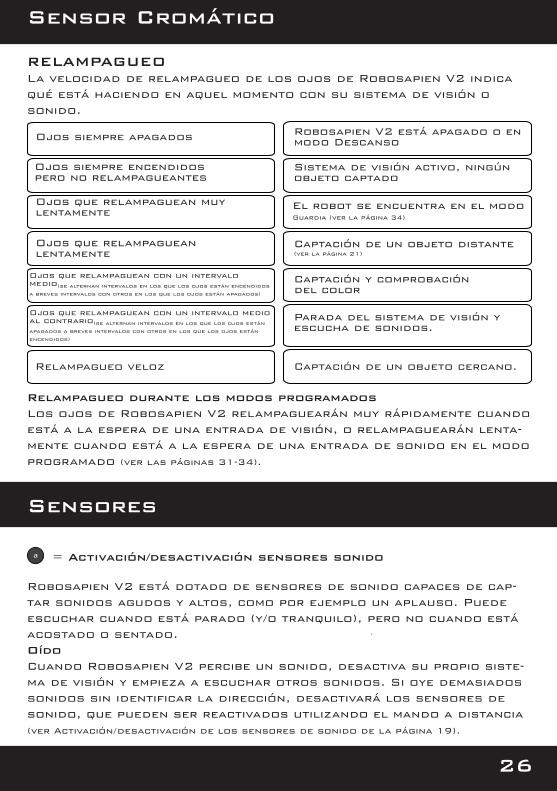
RELAMPAGUEOLa velocidad de relampagueo de los ojos de Robosapien V2 indica qué está haciendo en aquel momento con su sistema de visión o sonido.
Relampagueo durante los modos programadosLos ojos de Robosapien V2 relampaguearán muy rápidamente cuando está a la espera de una entrada de visión, o relampaguearán lenta-mente cuando está a la espera de una entrada de sonido en el modo programado (ver las páginas 31-34).
= Activación/desactivación sensores sonido
Robosapien V2 está dotado de sensores de sonido capaces de cap-tar sonidos agudos y altos, como por ejemplo un aplauso. Puede escuchar cuando está parado (y/o tranquilo), pero no cuando está acostado o sentado.OídoCuando Robosapien V2 percibe un sonido, desactiva su propio siste-ma de visión y empieza a escuchar otros sonidos. Si oye demasiados sonidos sin identificar la dirección, desactivará los sensores de sonido, que pueden ser reactivados utilizando el mando a distancia (ver Activación/desactivación de los sensores de sonido de la página 19).
26
Sensor Cromático
Sensores
Ojos siempre apagados
Ojos siempre encendidos pero no relampagueantes
Ojos que relampaguean muy lentamente
Relampagueo veloz
Robosapien V2 está apagado o en modo Descanso
Sistema de visión activo, ningún objeto captado
El robot se encuentra en el modo Guardia (ver la página 34)
Captación de un objeto distante (ver la página 21)
Captación y comprobación del color
Parada del sistema de visión y escucha de sonidos.
Captación de un objeto cercano.
Ojos que relampaguean lentamente
Ojos que relampaguean con un intervalo medio(se alternan intervalos en los que los ojos están encendidos
a breves intervalos con otros en los que los ojos están apagados)
Ojos que relampaguean con un intervalo medio al contrario(se alternan intervalos en los que los ojos están
apagados a breves intervalos con otros en los que los ojos están
encendidos)
Sensores
Si el sonido es lateral, girará el cuerpo en esa dirección; si en cam-bio el sonido es de frente, lo reconocerá diciendo “Hey there!” (¡Eh ahí!), o “Definitely something there!” (¡Está claro que hay algo ahí!). A partir de este momento las cosas cambian en función de que Robo-sapien V2 tenga o no en su mano la bola (véase más adelante).
Si el robot tiene las manos vacías:Robosapien V2 se dirigirá inmediatamente hacia la fuente del ruido (aprox. 90 cm.), pero puede detenerse si se le pone una mano delante de la cara (véase página 22).
Si el robot lleva un objeto en su mano:Robosapien V2 esperará 4 segundos antes de dirigirse hacia la fuente del ruido y dejará caer entonces el objeto que lleva en la mano. Se puede también hacer que lance el objeto emitiendo un soni-do durante el intervalo de espera de 4 segundos.
Nota: si la parte superior del cuerpo está girada y el robot tiene que girarse antes de dirigirse hacia la fuente del ruido, desactivará su sistema de visión y no tendrá ninguna reacción al ponerle la mano delante de la cara mientras se está girando.
Robosapien V2 no es capaz de escuchar los sonidos si está reali-zando un movimiento o si está detectando algo con su sistema de visión. Si se encuentra en modalidad de espera (véase página 20) no se dirigirá hacia el ruido tras haberlo detectado. Robosapien V2 supondrá que todos los sonidos provienen de la dirección hacia la cual está dirigido (derecha, izquierda o central).
SENSORES DE INCLINACIÓN
Robosapien V2 está dotado de sensores de inclinación capaces de interrumpir la mayoría de las funciones con la finalidad de evitar daños en el caso en que el robot se caiga. Si se coloca boca abajo, Robosapien V2 parará de funcionar. Si se cae sobre la espalda, parará de hacer lo que está haciendo. Si intentas controlarlo cu-ando no está de pie, el robot te avisará de que no puede ejecutar ninguna orden o de que necesita estar de pie and so will get up (y entonces se levantará).
SENSORES DE AGARRE
Si se le pide a Robosapien V2 que recoja o agarre un objeto utilizan-do el mando a distancia, utilizará sus sensores de agarre para veri-ficar el resultado positivo de la acción. Si detecta que no tiene nada en la mano, volverá a repetir automáticamente la acción una vez más.
27
28
Sensores
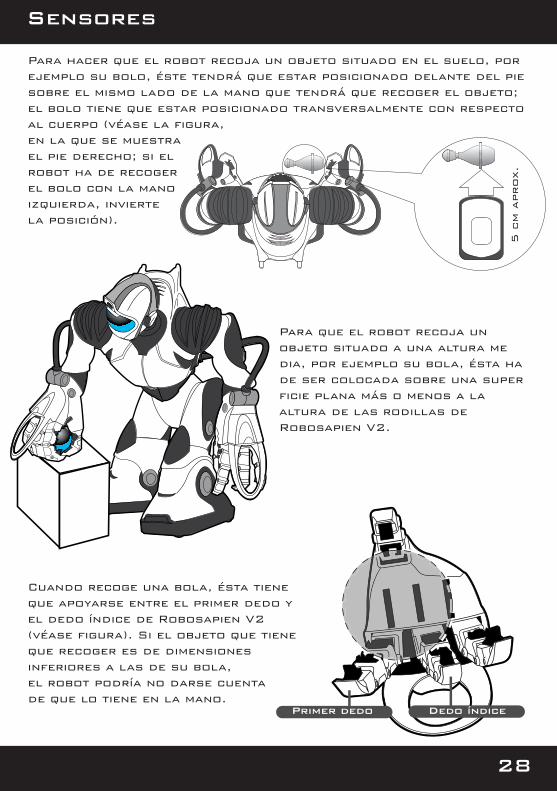
Para hacer que el robot recoja un objeto situado en el suelo, por ejemplo su bolo, éste tendrá que estar posicionado delante del pie sobre el mismo lado de la mano que tendrá que recoger el objeto; el bolo tiene que estar posicionado transversalmente con respecto al cuerpo (véase la figura, en la que se muestra el pie derecho; si el robot ha de recoger el bolo con la mano izquierda, invierte la posición).
Para que el robot recoja un objeto situado a una altura me dia, por ejemplo su bola, ésta ha de ser colocada sobre una super ficie plana más o menos a la altura de las rodillas de Robosapien V2.
Cuando recoge una bola, ésta tiene que apoyarse entre el primer dedo y el dedo índice de Robosapien V2 (véase figura). Si el objeto que tiene que recoger es de dimensiones inferiores a las de su bola, el robot podría no darse cuenta de que lo tiene en la mano.
5 c
m a
prox.
Primer dedo Dedo índice
Sensores
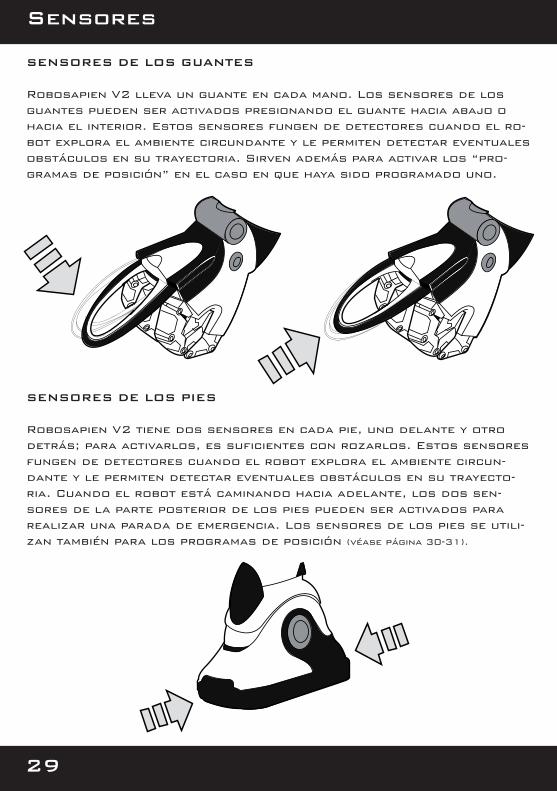
SENSORES DE LOS GUANTES
Robosapien V2 lleva un guante en cada mano. Los sensores de los guantes pueden ser activados presionando el guante hacia abajo o hacia el interior. Estos sensores fungen de detectores cuando el ro-bot explora el ambiente circundante y le permiten detectar eventuales obstáculos en su trayectoria. Sirven además para activar los “pro-gramas de posición” en el caso en que haya sido programado uno.
SENSORES DE LOS PIES
Robosapien V2 tiene dos sensores en cada pie, uno delante y otro detrás; para activarlos, es suficientes con rozarlos. Estos sensores fungen de detectores cuando el robot explora el ambiente circun-dante y le permiten detectar eventuales obstáculos en su trayecto-ria. Cuando el robot está caminando hacia adelante, los dos sen-sores de la parte posterior de los pies pueden ser activados para realizar una parada de emergencia. Los sensores de los pies se utili-zan también para los programas de posición (véase página 30-31).
29
Programación
BOTONES DE PROGRAMACIÓN Los botones de programación se dividen en dos categorías distintas: botones del mando a distancia y botones de posición; cada categoría está caracterizada por 3 modalidades de programación.
= Programa de posición – Encendido
= Programa de posición – Ejecución + + = Programa sonoro
+ + = Programa de visión
+ + = Programa principal
+ + = programa/Salida del programa
+ + = Cancelación introducción
CATEGORÍAS DEL PROGRAMA DE POSICIÓN (MODALIDAD MARIONETA)
Robosapien V2 puede ser programado manualmente moviendo su cu-erpo en posiciones distintas utilizando una de las tres modalidades de programación de posición: principal, izquierda y derecha.
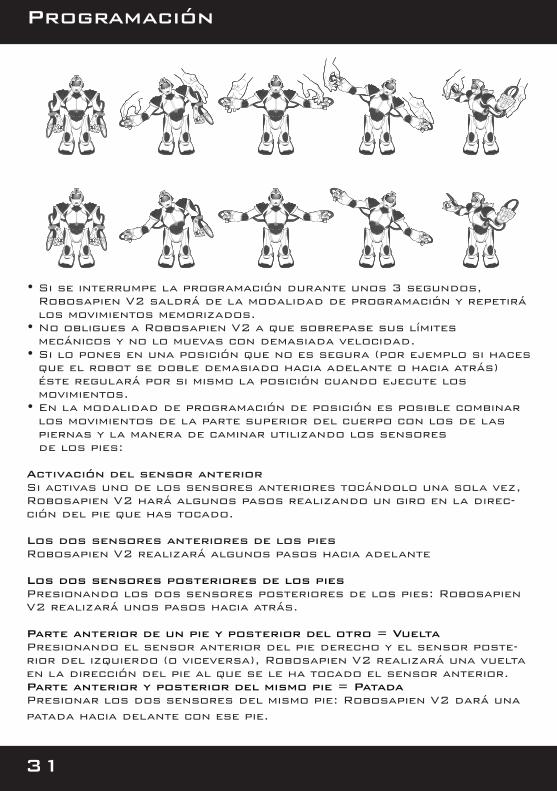
Modalidad de programación de posición principal Para entrar en esta modalidad se utiliza el botón del mando a distancia que permite acceder al programa de posición. Después de que el robot haya reconocido este estado, es posible empezar a programarlo.• La posición del cuerpo en el momento en que se accede a la mo-dalidad de programación es memorizada como posición inicial. Cada vez que se activa el programa el robot volverá a ponerse en dicha posición. • Mover los brazos y la parte superior del cuerpo manualmente. • Cada vez que se deja de moverlo, el robot memoriza su posición y la confirma diciendo “OK”. Es posible mover los hombros, las muñecas y la cintura hacia atrás y hacia adelante, la cintura hacia los lados y los elementos motores que permiten rotar la cintura.• Es posible mover más de un elemento motor a la vez, es decir es posible mover ambos brazos hacia arriba al mismo tiempo o make him reach out in front while bending forward to the side (hacerle avanzar mientras tuerce hacia un lado).
30
Sensores
Programación
31
• Si se interrumpe la programación durante unos 3 segundos, Robosapien V2 saldrá de la modalidad de programación y repetirá los movimientos memorizados. • No obligues a Robosapien V2 a que sobrepase sus límites mecánicos y no lo muevas con demasiada velocidad.• Si lo pones en una posición que no es segura (por ejemplo si haces que el robot se doble demasiado hacia adelante o hacia atrás) éste regulará por si mismo la posición cuando ejecute los movimientos. • En la modalidad de programación de posición es posible combinar los movimientos de la parte superior del cuerpo con los de las piernas y la manera de caminar utilizando los sensores de los pies:
Activación del sensor anteriorSi activas uno de los sensores anteriores tocándolo una sola vez, Robosapien V2 hará algunos pasos realizando un giro en la direc-ción del pie que has tocado.
Los dos sensores anteriores de los pies Robosapien V2 realizará algunos pasos hacia adelante
Los dos sensores posteriores de los piesPresionando los dos sensores posteriores de los pies: Robosapien V2 realizará unos pasos hacia atrás. Parte anterior de un pie y posterior del otro = VueltaPresionando el sensor anterior del pie derecho y el sensor poste-rior del izquierdo (o viceversa), Robosapien V2 realizará una vuelta en la dirección del pie al que se le ha tocado el sensor anterior. Parte anterior y posterior del mismo pie = PatadaPresionar los dos sensores del mismo pie: Robosapien V2 dará una patada hacia delante con ese pie.
La modalidad de programación de posición principal puede incluir un máximo de 12 movimientos. Si se alcanza este número, el robot señalará que tiene la memoria llena, saldrá de la programación y empezará a repetir los movimientos de la secuencia.
Para cancelar un programa de posición, entra en esta modalidad y no muevas el robot durante unos 3 segundos. Robosapien V2 sal-drá automáticamente de la modalidad y avisará que el contenido de su memoria ha sido borrado.
Modalidad de programación de posición a izquierda y derecha • Es posible asignar programas distintos a los sensores táctiles de izquierda y derecha del robot utilizando las modalidades de programación de posición izquierda y derecha. • Para entrar en una de estas modalidades de programación, toca uno de los botones de los sensores de los pies dos veces en un segundo.• Es por tanto posible programar el robot siguiendo el método utilizado para la modalidad de programación de posición principal. • El programa puede ser borrado entrando en la modalidad de programación y dejando inmóvil el robot durante unos 3 segundos.• Para ejecutar el programa, toca una vez uno de los sensores de los pies o de los guantes sobre el mismo lado del cuerpo al que ha sido asignado el programa.
CATEGORÍAS DE PROGRAMACIÓN DEL MANDO A DISTANCIA Es posible insertar los movimientos y las animaciones de Robosapien V2 en una de las tres modalidades de programación del mando a distancia: principal, sonora y de visión.
MODALIDAD DE PROGRAMACIÓN PRINCIPAl Para entrar en la modalidad de programación principal presionar + +
• Ahora es posible añadir movimientos al programa utilizando los mandos del mando a distancia: Robosapien V2 los recordará en orden. • Es posible introducir formas de andar distintas, movimientos de los brazos y de la parte superior del cuerpo, demostraciones y animaciones.• Cada uno de estos movimientos constituye un apartado del programa.• Si se utiliza un único movimiento motorizado, como por ejemplo movimientos de los brazos y de la cintura, el intervalo de tiempo durante el que se mantiene presionado el botón del mando a distancia, determina el punto hasta el que se puede realizar el movimiento.• Un movimiento completo es alcanzado después de tres segundos de presión continua del botón.
Programación
32
Programación
• Si la memoria sonora o de visión contiene algo, el robot ejecutará automáticamente los movimientos de la secuencia secundaria sin esperar. • Es posible poner a Robosapien V2 en la modalidad de Guardia como parte del programa principal.• Después de unos 90 segundos, el robot emitirá un sonido agudo o a close IR trigger (un disparo IR parecido), antes de continuar ejecutando el resto de la programación. • Si detecta un sonido o, con la visión de infrarrojos, un objeto durante este intervalo de tiempo, ejecutará la secuencia se cundaria pertinente antes de continuar. MODALIDAD DE PROGRAMACIÓN SONORA Y DE VISIÓNCuando Robosapien V2 se encuentra en la modalidad de Guardia (véase página 34) es posible asignarle una secuencia de movimientos activados por un sonido agudo (programa sonoro) o por un mov-imiento cercano detectado por la visión de infrarrojos (programa de visión).
Para entrar en la modalidad de programación sonora, presiona: + +
Para entrar en la modalidad de programación de visión, presiona: + +
• Las modalidades de programación sonora y de visión pueden contener un máximo de 20 acciones. • Las acciones pueden ser programadas siguiendo el mismo método utilizado para la modalidad de programación principal. • Es posible acceder a la secuencia secundaria del programa de posición principal en la programación sonora o de visión, pero no es posible introducir secuencias secundarias sonoras o de visión o entrar en la modalidad de Guardia como parte de un programa sonoro o de visión. • Cuando Robosapien V2 está ejecutando un programa no utiliza su sistema de visión de infrarrojos o los sensores táctiles para evitar los obstáculos.
Nota: todas las modalidades de programación se quedarán en la memoria cuando se apague el robot, pero se perderán en caso de sustitución de las pilas
Programación
33
• Si se introduce una parada en la secuencia, el robot se parará durante unos 3 segundos durante la reproducción de la secuencia.• En un programa no se pueden introducir las siguientes órdenes: descanso, apagar, activación/desactivación del sistema sonoro o de visión, interacción con otros robots, modificación de a forma de andar, modalidad de exploración autónoma e impostación de los colores. • La modalidad de programación principal puede contener un máximo de 20 acciones. • Cuando se entra en la modalidad de programación, la memoria contendrá el programa memorizado anteriormente, incluso en el caso en que Robosapien V2 haya sido apagado y encendido nuevamente. • Si la memoria está llena, el robot lo señalará en el momento en que se acceda a la memoria.
Para cancelar la totalidad del programa, presiona: + +
Para cancelar únicamente la última introducción, presiona + +
SALIDA DE LA MODALIDAD DE PROGRAMACIÓN Para salir de la modalidad de programación, presiona + + Robosapien V2 ejecutará el programa si está memorizado
SECUENCIAS SECUNDARIASEs posible añadir secuencias secundarias a la modalidad de pro-gramación principal para aumentar la extensión del programa memo-rizado. Procede tal como se indica a continuación:
SECUENCIA SECUNDARIA SONORA: + +
SECUENCIA SECUNDARIA DE VISIÓN: + +
SECUENCIA SECUNDARIA DE POSICIÓN
• Si se añade una secuencia secundaria sonora o de visión, pero la memoria de la programación sonora o de visión no contiene nada, el robot esperará unos 90 segundos antes de emitir un sonido agudo or a close IR trigger (o un disparo IR parecido) antes de continuar ejecutando el resto del programa.
Programación
• Si la memoria sonora o de visión contiene algo, el robot ejecutará automáticamente los movimientos de la secuencia secundaria sin esperar. • Es posible poner a Robosapien V2 en la modalidad de Guardia como parte del programa principal.• Después de unos 90 segundos, el robot emitirá un sonido agudo o a close IR trigger (un disparo IR parecido), antes de continuar ejecutando el resto de la programación. • Si detecta un sonido o, con la visión de infrarrojos, un objeto durante este intervalo de tiempo, ejecutará la secuencia se cundaria pertinente antes de continuar. MODALIDAD DE PROGRAMACIÓN SONORA Y DE VISIÓNCuando Robosapien V2 se encuentra en la modalidad de Guardia (véase página 34) es posible asignarle una secuencia de movimientos activados por un sonido agudo (programa sonoro) o por un mov-imiento cercano detectado por la visión de infrarrojos (programa de visión).
Para entrar en la modalidad de programación sonora, presiona: + +
Para entrar en la modalidad de programación de visión, presiona: + +
• Las modalidades de programación sonora y de visión pueden contener un máximo de 20 acciones. • Las acciones pueden ser programadas siguiendo el mismo método utilizado para la modalidad de programación principal. • Es posible acceder a la secuencia secundaria del programa de posición principal en la programación sonora o de visión, pero no es posible introducir secuencias secundarias sonoras o de visión o entrar en la modalidad de Guardia como parte de un programa sonoro o de visión. • Cuando Robosapien V2 está ejecutando un programa no utiliza su sistema de visión de infrarrojos o los sensores táctiles para evitar los obstáculos.
Nota: todas las modalidades de programación se quedarán en la memoria cuando se apague el robot, pero se perderán en caso de sustitución de las pilas
34
Programación
+ + = MODALIDAD DE GUARDIA
Cuando se pone a Robosapien V2 en modalidad de Guardia, éste se para y se queda inmóvil. Los sensores de visión infrarrojos o los sensores sonoros estéreo emitirán una alarma o ejecutarán un pro-grama específico si son activados por la detección de sonidos o por la visión de objetos.
• Si el sistema sonoro o de visión de Robosapien V2 está desactivado cuando se encuentra en modalidad de Guardia se activará automáticamente. • Los sistemas serán nuevamente desactivados automáticamente una vez que se haya salido de la modalidad de Guardia.• En la modalidad de Guardia es posible utilizar tanto el programa sonoro como el de visión (se trata de su función principal).• Si se molesta al robot y la memoria del programa no contiene nada, ejecutará una acción predeterminada. • Para que Robosapien V2 salga de la modalidad de Guardia, es suficiente presionar cualquier botón. • Si el robot detecta 10 sonidos seguidos sin que se interponga ninguna molestia visual, desactivará el sistema sonoro. • Si el robot detecta tres molestias visuales seguidas sin ninguna interrupción entre ellas, desactivará el sistema de visión.• Si los dos sistemas se desactivan de esta manera, Robosapien V2 saldrá de la modalidad de Guardia.
Advertencia: dado que Robosapien V2 se anima durante la modali-dad de Guardia, es aconsejable no dejarlo cerca del borde de una mesa.
Nota: cuando se encuentre en la modalidad de Guardia, Robosapien V2 ignorará el sistema que permite apuntar con el láser; sin embar-go su sistema de visión infrarrojo podría interferir con su visión. En la modalidad de Guardia los sensores táctiles no funcionan.
Robosapien V2 se apagará tras unos 30 minutos en modalidad de Guardia.
Modalidad de Guardia
35
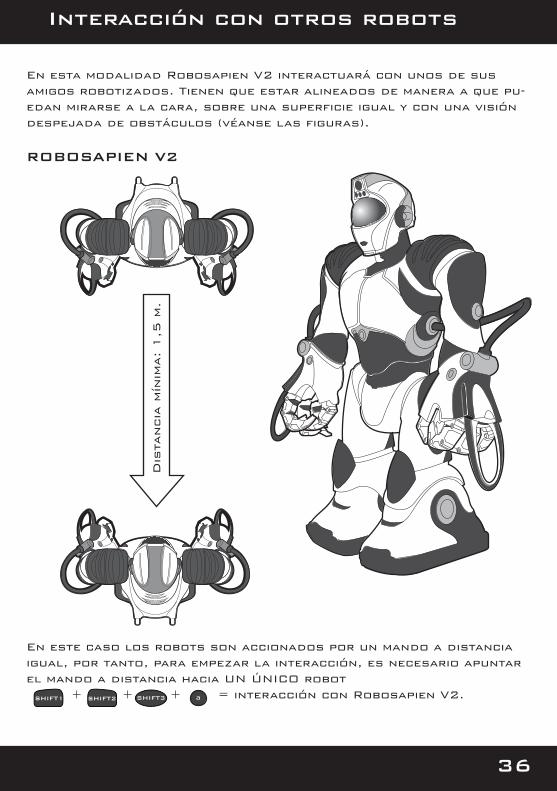
En esta modalidad Robosapien V2 interactuará con unos de sus amigos robotizados. Tienen que estar alineados de manera a que pu-edan mirarse a la cara, sobre una superficie igual y con una visión despejada de obstáculos (véanse las figuras).
ROBOSAPIEN V2
En este caso los robots son accionados por un mando a distancia igual, por tanto, para empezar la interacción, es necesario apuntar el mando a distancia hacia UN ÚNICO robot + + + = interacción con Robosapien V2.
Interacción con otros robots
Dis
tancia
mín
ima: 1
,5 m
.
36
Modalidad de Guardia
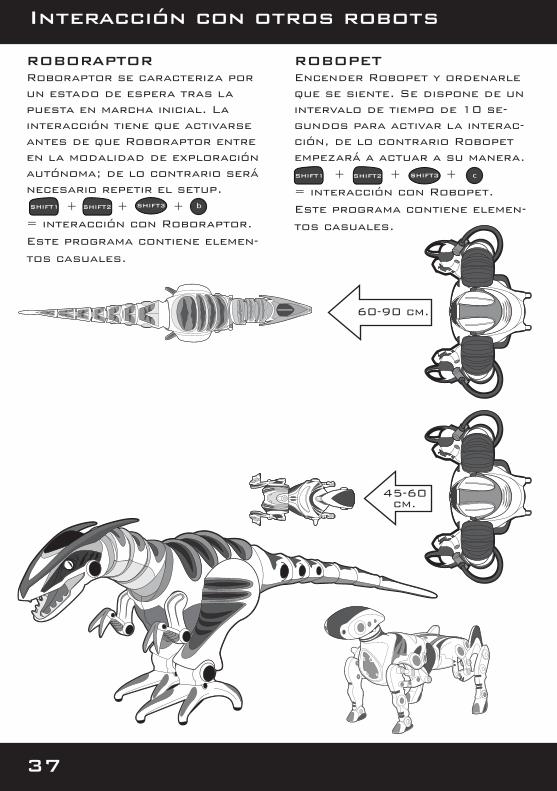
ROBOPETEncender Robopet y ordenarle que se siente. Se dispone de un intervalo de tiempo de 10 se-gundos para activar la interac-ción, de lo contrario Robopet empezará a actuar a su manera.
+ + +
= interacción con Robopet.
Este programa contiene elemen-
tos casuales.
ROBORAPTORRoboraptor se caracteriza por un estado de espera tras la puesta en marcha inicial. La interacción tiene que activarse antes de que Roboraptor entre en la modalidad de exploración autónoma; de lo contrario será necesario repetir el setup.
+ + +
= interacción con Roboraptor.
Este programa contiene elemen-
tos casuales.
Interacción con otros robots
60-90 cm.
45-60 cm.
37
38
Notas importantes
No entregues a Robosapien V2 ningún objeto de valor o frágil para que lo sostenga en la mano; podría dejarlo caer inesperadamente.
Para entender a Robosapien V2, puede resultar útil aprender a con-ocer el significado de la intermitencia de los ojos. Presta atención a sus ojos y a sus acciones.
Robosapien V2 camina mejor sobre superficies lisas. Si presenta dificultades para caminar sobre una determinada superficie, intenta cambiar su forma de andar de manera a obtener mejores presta-ciones. Robosapien V2 responde mejor a las órdenes del mando a distancia si se le apunta desde delante. Si, en cambio, el mando a distancia se encuentra detrás de él, no será capaz de detectar las órdenes.
Las funcionalidades de rayos infrarrojos pueden ser influenciadas por la luz solar cuando ésta es de particular intensidad y por lám-paras fluorescentes y dotadas de modulador de intensidad elec-trónico. Para informaciones adicionales véase la sección Sistemas de visión de Robosapien V2 (páginas 21-22) de este manual.
Robosapien V2 posicionará su cuerpo, por si mismo, en la posición correcta para caminar. Si se intenta mover sus brazos con el mando a distancia, parará de caminar. Si se mueven manualmente sus bra-zos o su cintura mientras está caminando, continuará caminando, pero podría perder el equilibrio y caerse.
Tras su activación, Robosapien V2 será sensible a los sonidos, a la visión y al tacto: se trata de su modalidad predefinida. Entrará en dicha modalidad cada vez que se active después de una parada completa.
El sistema de visión de infrarrojos de Robosapien V2 y el sistema que permite apuntar con el láser se basan en la reflexión de la luz. Esto significa que el robot es capaz de distinguir mejor superficies altamente reflectantes como son las paredes blancas o los espejos antes que las superficies negras u opacas.
Si no logra distinguir los colores correctamente, verifica que hayas impostado el balance de blanco de manera adecuada en el momento de la iluminación de la habitación.
Advertencia: la cabeza contiene numerosos sensores y tiene que ser manipulada con cuidado.
Importado y distribuido por:
GIOCHI PREZIOSI ESPAÑA, S.L.
Avenida Barcelona 109 - Planta 1ª
08970 - SANT JOAN DESPÍ
BARCELONA - ESPAÑA
Fabricado en China
Robosapien™V2Una Perfecta Fusión de tecnología y personalidad
WS8091ES01(GPZ)