Embed Size (px)
Citation preview
! #"%$ &('!)+*%,!-
Control of nonholonomic systems using iterative curvature feedback∗Masato ISHIKAWA, Kyoto University
Abstract– In this paper, we deal with a point-to-point control method for a class of nonholonomic symmetric affinesystems, whose dynamics are described by principal fiber bundle and connection form. Based on the estimate of geometricphase of the system using its curvature differential form, we propose a periodic feedback control method which drivesthe state to a desired one. Finally, we also propose an iterative tuning method to attenuate the estimation error of thegeometric phase, called iterative curvature feedback.
Key Words: nonlinear systems, nonholonomic systems, holonomy theory
1 .0/214352687:9<;>=@?@A2BDC>EGFIH2JLKNMPORQ<S>T2UWV:XMPOZY+[]\!EGFI^`_baNc<d`egfihkjPlDaZm:ngoqpsrutv@;uw@x2y:zpoint-to-point
^`_8tIvsXI%|~iZH2JK@MPORQ`S2T2UNV:9RxGjRlsMPOZY[\EGF2aNc<degfhkjRl8XIk2:<!opsr:N<:`@7kkrG 1);LM2OZY+[\EGFI^`_8<RLaR9G22kPLkr
92¡`¢¤£¦¥R§:¢RPDXI¨:©!ª«x:¬ZL®Rxb¯Ix q°±oGXZ²RwbruP³2>;DMPOZY´[µM<¶@·¸Y+[^`_D7fihNjRlP¹NGm:nDXR2wbrIº2»@7WRd`eL¼¸;G½k¾Da¿DÀ ¯ÁbrÂR§:jRlDaZH%ªÃesĵÅNÆWaZÇ2ÈXGÉ`Ê%ªGcuqwRL®GË:ÌN9kM:OZY+[]\EGFI^`_4I͸Î:ÏLP°¸±oauÐRÑ`wbr:W¸a>xWrGH:J8KLMPORQ>SRTPU@V:!z`;
chained systemxÒ`Ó>ÔWPÕRÖI×ØÙYWÚ
2)XIÛPÜ@S<T>UkVÝRÔRÞW³27R
Lie ßPà<á 7`u^<_RâL¸ã:äor<S`T`U:V (first ordersystem)3, 4) xbÒIuåRæWÆPÓ`çDx<`^>_PâPèké8XIÛWÜ@STuUPV>aHªµeR9:k³<72a:¼GMuOÙYê[ë\EFµìRÝ<ÇuÈÉuÊN«¨R©<í:î:ïoµPe:ðZ>ÁñkÕuÖq×gصYkÚIòPkcµaÃó`ôNxG^G_`â>è2éWXR¼ÙÜD¼I2aIÜ eN¼Ã;¸2rõZöW÷P`øaR>@rIùDðIú8S>T>UNVPaÜ ek9IîWïWûNü 7 r 5, 6)
<;R¸ZuøD9¸WS<T<U:VDÙRý>þÁEÿLð aPPÆ:xRíg«92x|We x 526L7W9<; @LcqxkWPS2T>UWVkLa 2K<ÿNAÃY >7R9<xÁ;u^G_>â
Lie DaIH oÙp@eG¥R§NÆWx^`_! !"8X$#%Gw@K2ÿLA¸Y!NX$252ªqeu;2qLX'&!(w8r)>í@X+*,2w8rZÃG^u_Lie
9ujRl-/.:a0 e`Ì1NÆWa û2 «r354F7698XLie ßPàGá ÷k7: @¼Z>7P:rZ 1
ÞWLie ßPàá aH wsr¥P§P^2_! !"D9 y!;Wr Lie ßkà>á!< ÅPª«e5 >=`Ækx?@7L¼Pc@BA ¯ÁbrP¼GR7kkrG
7) ;$CuÞW Lie ßRàGá a¸H wrD "DXE r2k9I=F a`°±N7RPrZ'G@I7Z5uî:ïR7R9;IG^u_Lie èkéX-/.53:aHIsªL¼G27Wkru?@A2BDCqYJ
KL ÷MNN$OsX'PQA%ªq;RÓRL¥P§S "8XIó õ T2 »8ypsr:N¸aWc`d`e`;1!UNGjRl:¢`bX`ø@ÆWaV É opsr:íDX* ,kwbrG51!UNujRlP¢`DWQXN7Z8®<;u`øbaY/ZGwsr'[\s¼u³2WQX@7kkru7>;!fihkjRl8a$]^%ªÃe `_RÎL7k9kMPOZY+[\EGFa!b8aWc<d`e5[\Xc:xg|ÙZÎ:Ï/d]PwbrkWR7ð:r<ok¯Iabf hkjRl@e º2»PÝk;f:ÅsA5gsEh6~a0@¬Wr«Ç2È!i jLt¸vxbÒ¸aZH wbrG ;>Ô@kPlSm
n ¸aGÉpoÃ5[\8X á #!ªÃeu¥R§S "SkW5qsr tuYÚRXu v:w8r KL lSmbMPOZY´[]\EGF¸íDX* ,:wrG2 w7x2.1 y z>|!~S>T>UWVRGjRl-.
MPªÃe>;PW@:ñ@
Q
Lie Gc8¯ è<ÊboÁ@rÃÐ áS M\>Y^ M = G×QZèkéDXIÛ:Üb¼GkX À r 8) Q
X!-/.b)kujlS4F7698DXξ = (g, q), g ∈ G, q ∈ Q
Pw2G<Ó$Q
ea50W¬PrD!-Q.
TeGX
g!ª;
G
LieJ ~
∀a ∈ GX
GS@a)cs¯+cP¬PrAX À r@;
GWPÍ$/
La : G → G, La(g) := ag
5%¯ÁbrG G:ea0@¬:r+W/PªÃe>;
g = TeGZö:÷Q
g → g!goqk;Ã8X
DLa
PwRoIe<;u^`_ "uPªÃeP9-/.Ra0N¬:rq½k¾N
4bF68bX ¿8À ¯µW;`wDxPyWzq = u
7WWrLwruS>T>UWVR9ZÞNG÷@GjRlS>Î!MLa$juµwbrG
ξ =
[
DLg · Γ(q)I
]
u (1)
k<7I9 /"êGÍoÃÞ@DPÓ/ 87L@r>P³k
Γ : Q → g ⊗ T ∗Q9<;
ga¡bXDGr£¢
QW¤WQR÷
MW7k|~;¥S¦§!¨!©ªg ~2.2 5|!~S«¬@®¯@°±f:ÅsA5gbEh6XI wbr¸ñ²IG=L?@A2B8C>EGF`ST<UkV> < Å ³S´µ8N5¶X·@75¸2ùkWFSrTPa$¹ª;Ã!¯«9 < ÅNLAgEh6~/º »@¼@3:ðRa$½%¯«x ¾S¿ªÃ5À 9) XIÛPÜWNL:I9ZjRlS-/.2 M!>\kY^>èWéLa oqN < ųkÆÁS^SÂÃsa²R% ÅÄÆ@7ÀQL¬8¯ÁbrG³Ç
G
M¹PA@X' ªe50sk9Ij`lk
GÊN 2 ¹N$QAk;uwLx2yPz
∀a ∈ G,∀ (g, q) ∈ MaZH!ªÃeΦa : M → M : (g, q) 7→ (ag, q)
ÃSÈ:wr<8o@¯ZaΦa : M → M
W@êkªeM:\sQ[8
TMNZö:÷@
DΦ : TM → TM
@ oÙbruuw8xRyWzG;ξa0L¬kr½k¾LQ4bFÉ698

∀X ∈ TξMaZH!ªÃe
DξΦa(X) :=d
dtΦa(ξ + tX)
∣
∣
∣
∣
t=07`È oqbrGoIeMÊ
ξ = (g, q)Ta0 e>;`^`_! "8X ¿Àr:W¸aWc<d`eËQ.`ÆWa û/2 «r3>$::»
Hξ := Im
[
DLg · Γ(q)I
]
⊂ TξM
9TM
uÔRÜN5ÌSS^k;>ÜN³ |MW!ÍsX¸¾ÎªÃe rGªÃR:d`e
TΦ(H)92³2
TM5ÌSS^N7|i;
∀a ∈ GaZH!ªÃe
DΦa(Hξ) = Im
[
DLa · DLg · Γ(q)I
]
= HaξX$ÏD<wRDGGâ@ÐDaNc|i;H9
G- Ñ@Ò 7WWrL H
G-P¢W7kNr:N'c¯Ù;
HX$Ó@Ô -/.µwr
MW$R@5!¯k;RP÷M
Γ : M 7→ g⊗ T ∗M9Γ = adg · (DLg−1 ⊗ dg − Γ(q) ⊗ dq) (2)IxWrGLÃL9Õ¢
Mk¤
g¡ WQR÷SMW7kkrGLR7
adg
9gNa0N¬Pr
g ∈ GÖ× Rk7Ps|~;
GbÄ$Ø2Í$
ιg : G → G : h 7→ ghg−1$WQ
( g2¹N
Q)RªÃe`È oqbrP¼G>7kkrG
Γ9«½R¾NÓ!Ô48FÙ6Ú8>º
X ∈ HaIHª
Γ(X) = 0,½k¾@Y ∈ g
5254F76982ºY ∗a¸H!ªÃe
Γ(Y ∗) =YX'Û>wbcLµx
M:
g¡WS>÷SMP7P:r¸
ΓIèRéXÜbr@Ù;pݵY £DݵYJ@èkéN 2 c¯¸ð>³NrÌS
adg , DLg−1
q;>S`T`UkVÞ¸²NßàW7::rÌ1W!2÷M
Γc¯Ê8d`e rG
2.3 áâDãhä'åsæÙç9è é2ªqe`;Fig. 2.3
aê2wcDxÔRÑ:75ëì2ÜðsݸQPFu3Ü>PË oqNíïî`Sf:ÅsA5gEh6~´ µ
88X$ À r10)`³>ð!ñR7R9Ô òªÙe5ó ô õW 2 X« G:ËÌL95öNeÄ÷N·L7Wkruë ìD9ÉݸQPF<
øÊLau;pݸQ2FL+Ô8x>3G¹N < Å@ 2 X$ùPwscaZê| ÜL¬D¯Ne rúDzëìNkû@98Ä÷u7:b|i;ü/ý |X8ª«x ¼GbwbrG5þWÓkR ÝZQ2F<ÿoZ9<ÓQÿ82 µwbrGí²î¸Ý¸Q2F 1 L
Link 1
Link 2
Link 3
PSfrag replacements
(x, y)
θ φ1
φ2
X
Y
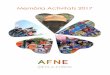
Fig. 1: snake-like wheeled mobile robot hsX(x, y)
>ªq;LÙLX$íîI/º 2ªÃe`wbrÝQRF
1
X aH!ªe<ÊPwX θ,ÝZQRF.PRkH8XG<<
φ1, φ2
+0hµujRlS4F7698Xξ :=
[
x, y, θ, φ1, φ2
]T,
+0@ðG;GRÊ8X
g :=[
x, y, θ]T
, q :=[
φ1, φ2
]T
`:wRq95íïîZ<÷PjX$:w2;5@-.
Q = S1 × S
1W7kPrG<Ôg9í²îBöN/º3:ðRXPw>Ê
N7kb|i;pݵY G = SE(2)W7:krG
SE(2)k #L9GÞ@@cqxRÍuÞR¢ ! Lcg¯!#N7:wbrG
Lg :=
cos θ − sin θ x
sin θ cos θ y
0 0 1
(3)
ëìN ü/ý |`ªIx W'c¯35L < ųNÆÁS^N p%¯ÁbrG>;`^`_! "2ªÃe
u1 = φ1, u2 = φ2
X ¿À ¯µsrLÙwsrLÃ;Á!^ÂSÃDGkP³P³(1)M@u÷DjRlS>ÎQMgIxWrGRSªq;
DLg :=
cos θ − sin θ 0sin θ cos θ 0
0 0 1
Γ(q) :=1
∆
− cos(φ1 − φ2) − cosφ1 − cosφ1 − 1sin(φ1 − φ2) + sin φ1 sinφ1
− sin(φ1 − φ2) − sin φ1 − sin φ1
∆ := sin(φ1 − φ2) + sin φ1 − sin φ27kkrG
Remark 1 Γ(q)høDaP8%r ∆
9ker∆ =
(φ1, φ2) ∈ Q|φ1 = φ2R¡La
0ZxLr<8u`jkl95í²î¸ à j (
QëìLë Qÿ2öD<Ô!Êk7@yNr )³2R9GÔ:ÐGö(!ëì@ë ÿ2ö@Ô )
a2xRd<º2»8a$R8ªq; ÇR¼'!ëì8a NwbrÁS^SÂÃ85j¹Da2xPd`eª³ijRl@7kkrGu5N7:95ÁS^SÂSÃbX¼<d`eí²î¸ < ųkÆRÅ8X e ru27>;s 7W9 < ÅD"!@ÊZx@r (wDxPy@zu;GW<j:la0¬:r < ÅN5WoqLx )
#$Da/c@rPcÙaker∆9
QX
2ÜWZ2Ë>ÊSLa$%!ªÙesªÃ³gÁ ;
QöSX«Å²uc8x < ÅW7P9&!>j2lN5¿_@'¬D¯@x 5N7k9!!ÊNa()%ª«x cqxbØGQ<Õ2 < Å@2 X+*W>w8rG
•
Ì51kÆPa`9G9
3ÞR;
M9
5Þ:7PRrcs¯Á;
MWg¡WQR÷MW7kkr)2:÷M
Γ9
Γ = adg
[
DLg−1 −Γ(q)]
dx
dy
dθ
dφ1
dφ2
(4)
@cÙa3 × 5
$ ¡ N 75oq8rGDRZ7
adg := Deιg =
cos θ − sin θ y
sin θ cos θ −x
0 0 1
7kkrG
Remark 2ukDa0 e
24fI9
3#f
−1 ZxPd`e ruLL9θ = 0
>¡W9θ = −y
¸x@r:¸aGH wbru5j8d`e`Ì1 P:÷M@N¬RX 2 e r@y
θ < ÅL9j¹@7kWrkcÃa5Ü À ruDÃ%¯X+,-sopsr`a29
SE(2)«R/.&01WG5!ÐkÆP7k:rGD@W)cs¯;
x
y9
ΓG: á `â8X)PQAªÙeG^u_ªq;/º324@9
SE(2)G=k2âbX'P!A!ªÃe5Rwr@ 25NÆkx^<_Q6D`ÉW³GNe urG
•
3 798;:=<?>A@CBEDGFH=I9JÞW7`È oqrPcx<;5>:÷MΓ¾R¢KWQ
ΩX À rG
Ω(X1, X2) := dΓ(hX1, hX2) (5)
2Z7∀X1, X2
9MI½:¾@4DFÙ698RºW7ks|~;
hX9X
H¹WLMD7kkrG
Ω9 ¢
MW¤
g¡
2Þ
W/P÷MN7kg| ;NO©Qªg'k®Gbru¶·D7¸kùWΓZèkéDX'PQA2wbr@Ù;
Ω9
Ω = adgΩ (6)
Ω := dΓ − [Γ(·), Γ(·)]g (7)
orGWR¸7dΓ9uÌ1 2R÷MW ¢
Qk72¤KW:7P2rZ«³<
ΩX¸Ì1 KL ÷Mg ` ; ¢
Q:¤
g¡
2ÞW!2÷ Mk7::rP
2MkP
2 Q [·, ·]g9sݵY
Jgk7`oÙbr
Lie á ( á )
7P:d`e>;g
#@G=k2âa!÷R>wbr Q 7kkrGí²î`A5gEh6~GºR»LèkÆkxk@95ð@ñ:@ca2xWrG
dΓ =
2(1 + cosφ1 + cosφ2 + cosφ1 cosφ2)−sinφ1 + sin φ2 + sin(φ1 + φ2)
sin φ1 + sin φ2 + sin(φ1 + φ2)
dφ1 ∧ dφ2
∆2
(8)
[Γ(·), Γ(·)] =[
0, −∆, 0]T dφ1∧dφ2
∆2 (9)S>T>U@V2`>^`_Pâ%S L ÷M@ÄÆD9`;>ÞNR?@ABLCUT@V8aWc<d`eGËQ¼W¬8¯ÁbrG
XY1 (Ambrose-Singer11))
Êξ ∈ M
a0 e V ɪ«r[Z\³kÆ!RL$:P»W;<wLx`ykz`?NA2BLCYJh(ξ)9u;
ξcb¯Ó/]^SöL7GË2ùr'öWeRÊ::P»X
H(ξ) ⊂MµwbrWZðG;
Ω(H(ξ))a_!ª
•
M@<\NY^>èWéPbX %ªÃ<H2JLK@MPORQS>TRUWVPa0 e>;k?@A2BDCqYJL9``^`_Pâ8ÄÆ!` öLa¸H wrZ'è :Æ:a`9h(ξ)
95Êξcb¯aZ\S³:Æ
QR8aSb!Pªe û r[bkÐ3R54F7698D$::»X!ªÙe0|~;
h(ξ) = gNc8qa
G$!-Q.«Í oÁÞSXk¼e:®<`^`_N;
h(ξ) = 0xb¯c`Sö@?@A2B@C>EGFL
¸W¸a2xWrGíîIéN7R9G;
∆(q) 6= 07:Prdg|9G;½:¾La$Xgox
ξufea0 e
Ω(H(ξ)) = se(2)7kkrjDd<e2;
QWÂR§/ºDX$QÊPªÃZ½k¾DaX oZxgÇ2ÈXhrPkIakcL|i;
se(2)a0N¬Prq½:¾W3`Z\³:Æ$
RX V Ék7Wð:rG
4 798jilknm=oAHqpcrtsvuxwzy4.1 |~/&/"/A&f/"^x ¢¡£¤¦¥§¨© [ª«¬®v¯U°;±+²³v´µ93E¡¶ ±¸·^¹º»½¼¿¾9ÀÁ[ÂÃxÄÅÆ¡ÇÈ"É·/ÊfËÍÌ΢ÏÐ ÀxÑU[µz±ÒÔÓÕÖ¸×Ø"¡Ç
Q Ù ÚÛ ¥[ÜÝ A±¦/Þß
∂AàlÒ¦Ó¬áâ"ãäå
Γæ"ç/Ó/Ê
Stokesèé ∫
∂AΓ =
∫
AΩ£^êìëí ã"îfï í ã ðfñ¢ ®A¡Ç
Q Ù ·Ê ¥óò M Ù â"ãäå ·"ô"¡3õö äåΓæç/Ó/Ê ¶ ÷+øEfùùú"çA¡ ¶ ±[Ê&·û ¥ ç î ¬
Aü ãý ¥þÿ
rA
æ ä Ü"Ý ± ®¬&vÊA¡ äå
ΩA
±πr2
A
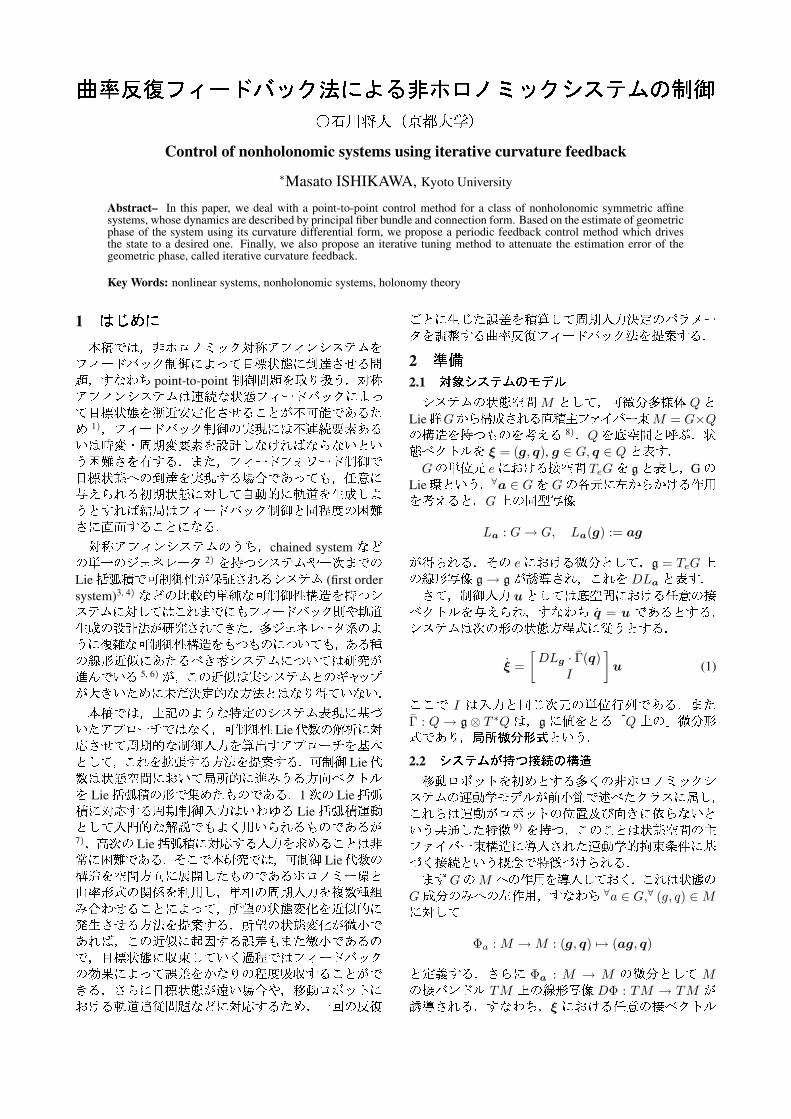
íó·f´"ó£ òó·û/¡ÇFig. 2
^£ ¤ Q Ù 3
æ ä Ü/ÝA, B, C
±ÒÓʬԮ®"&¡ äå î ¥^ò ± ë ä ¥ ¡£ ¤ ¥ /+ª! ¥ [® ¥#"¸¥ çǶ¶ ·Ê¬¸®® $î&% òÔ¥ ¡£ ¤ (0,−π
2 ),(1,−1), (2,−2)
'(^v±)ÓçA¡Ç/f/""η ∈ se(2)
àlÒÔÓ¬
[ ΩA ΩB ΩC ]
sgn(dirA) · πr2A
sgn(dirB) · πr2C
sgn(dirC) · πr2C
= η (10)
*+fÆri
,Aجsgn(diri)
fA/-#)Ó ä ÜÝ ÞßA.0/1¡ ¶ ±±Ò ¬ ¶ ®ó1 2 ÀÑÔ±cÆ¡Ç34 ±ÒÔÓÆ¡[""AÊ56
η/ç ± ¥ ¡[Ç ¶ 7¬
Q Ù ·&Ê §+¨© 8çÓç¡9 " ¬ ¶:;&<=·φ1
±φ2
Êð>jÒ ¥ ç/Ç
C
singular shapes
A
Q
B
PSfrag replacements
φ1
φ2
π
2
π
2
φ1 = −φ2
Fig. 2: generating an se(2) motion
4.2 ?@0ABDCEFHGJILKM&NO(x, y, θ)
ÅP^9±&¯ì°Í±Ô[²&³´µÆv¡£ ¤ηQ#R¡ó±¸¬
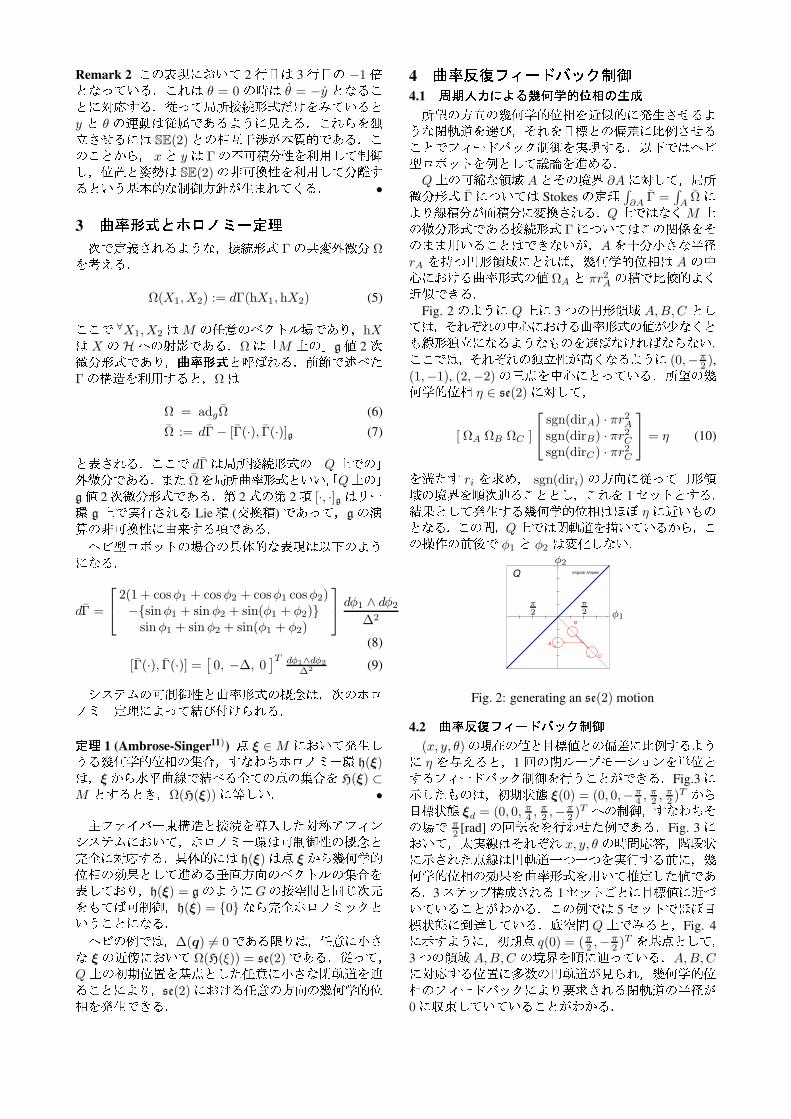
1 S §T »U V/»WYXZ&[f ±Æv¡¹&º+» ¼ ¾¢ÀÁ+ÂÃ]\ ¤ ¶ ± î ·"û¡ÇFig.3
^ Ò_+ Êf¬`a0bcξ(0) = (0, 0,−π
4 , π2 , π
2 )T9 "¯ °0bc
ξd = (0, 0, π4 , π
2 ,−π2 )T d Âfì[Æ ¥feg h·
π2 [rad]
S&i \ e +fµ^·"ô"¡Ç Fig. 3ç/Ó¬jÄëvÊf®®
x, y, θ k7lm¬0n&o0b ^ ¦®+ (fëvÊ ¨&©p æ p æAÄ\/Æ¡<óf¬/"óq 4 0 äå ú"ç/Órè9Ò]+v·"ô¡Ç
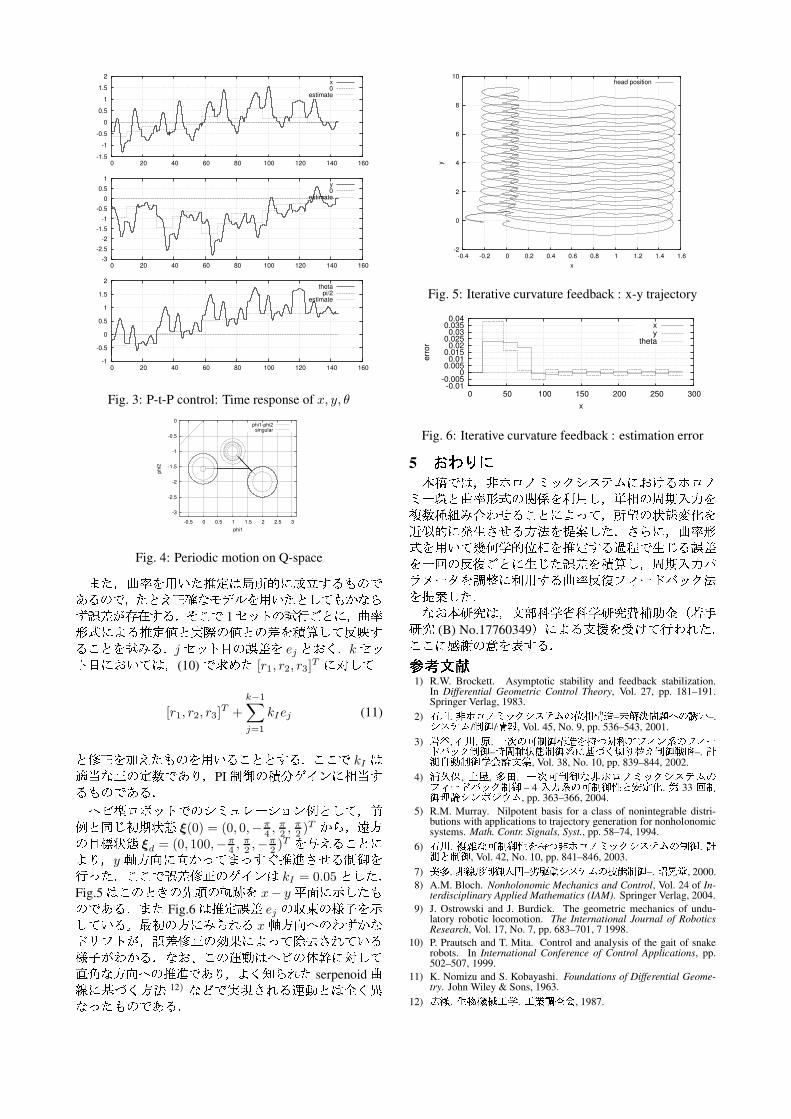
3 sft ÀuUvw¢ ®v¡ 1 2 ÀÑyx"±+A¯ °ó zç/ÓçA¡ ¶ ± î e 9^¡Ç ¶ µ^·/Ê5 2 ÀxÑ ·56x¯°bcv|zÒÔÓçA¡fÇ~7
Q Ù ·v¡^±¸¬ Fig. 4 ^ Æ£ ¤ ¬`a(q(0) = (π
2 ,−π2 )T(E±Ò3Ó¬
3æ Ü"Ý
A, B, CÞ/ßv.v1)ÓçA¡fÇ
A, B, Cà l/ÆE¡¦ó&ó ¨&© î " ®"¬/󹺻½¼ ¾9ÀÁ£vê,¢¦®E¡ §¨© þÿ î00zÒÔÓç/ÓçA¡ ¶ ± î e 9^¡Ç
-1.5
-1
-0.5
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160
x0
estimate
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
0 20 40 60 80 100 120 140 160
y0
estimate
-1
-0.5
0
0.5
1
1.5
2
0 20 40 60 80 100 120 140 160
thetapi/2
estimate
Fig. 3: P-t-P control: Time response of x, y, θ
-3
-2.5
-2
-1.5
-1
-0.5
0
-0.5 0 0.5 1 1.5 2 2.5 3
phi2
phi1
phi1-phi2singular
Fig. 4: Periodic motion on Q-spaceù+¬Aú"ç+rèÊáw ÆE¡ &·ô¡·¬+A±R] ¥ V& T Ôúç +±Ò Ó 9 ¥!" ³ î PÆA¡Ç3 ¶ ·1 2 ÀóÑ \Dx/±Ô¬äå £&¡]rè=± Ä"=±+f³v+ízÒ¸ÓÆ¡ ¶ ±+]¡Ç
j 2 ÀAѸ¯¦ ³ó ej
±u ò Çk 2 ÀÑ[¯+&ç/Ó/ʬ
(10)·f,óØf+
[r1, r2, r3]TàzÒÔÓ
[r1, r2, r3]T +
k−1∑
j=1
kIej (11)
±0óDR+ /[úçó¡ ¶ ±±aÆ¡Ç ¶&¶ ·kI
Ê ¥ èf^·"ôxê ¬PIÂÃví ã Z Æ¡ &·"ô"¡Ç
ËlÌ Î¢ÏÐ ÀxÑ ·0WD!Ô»WYXZ+µz±"ÒÔÓ¬ <µl± ¡y`ab cξ(0) = (0, 0,−π
4 , π2 , π
2 )T9 " ¬¢E¯ °bc
ξd = (0, 100,−π4 , π
2 ,−π2 )TQ!R¡ ¶ ±£Eê ¬
y £ A"9)Ó"ù0)Æ¥¤ur/×zÔx¡[Â&â\)+Ç ¶¶ · ³0 ZÊkI = 0.05
±Ò]+&ÇFig.5
Ê ¶ ±û¦ §ó ¨¨ x− y © ï ^ Ò_+ &·"ô"¡Çù+
Fig.6Êrè ³
ej
0^ª«v ^ÒÔÓçA¡¬`óA " ®¡x £ ó d e 9 ¥¼®¹=Ñ î ¬ ³q 4 £f)Ó¯°¢3®ÓçA¡ª« î e 9^¡fÇ ¥ 0± ¶ ²0³óÊË9Ì&´µvàzÒÔÓ¶f· ¥ d r×^·ôê ¬/£ ò¹¸º" ®+ serpenoid
ëEz ò » 12) ¥¼ ·Ä/ÅÍ3®¢¡²0³z±Ê½ ò_¾¥ )+ &·"ô"¡Ç
-2
0
2
4
6
8
10
-0.4 -0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
y
x
head position
Fig. 5: Iterative curvature feedback : x-y trajectory
-0.01-0.005
0 0.005 0.01
0.015 0.02
0.025 0.03
0.035 0.04
0 50 100 150 200 250 300
erro
r
x
xy
theta
Fig. 6: Iterative curvature feedback : estimation error
5 ¿DÀÂÁÃÄÅ ·/ʬÆÇ ÏÈ ÀÁW s tÉ &!/¡&Ç ÏȦ»Êl± äå ÷[øEË"úzÒ¦¬0[fAÌaÍÎvÏ ÐÑfÒ e E¡ ¶ ±£f)Ó¬/&bcð>^x x¡+0»vÓÔjÒ+Ç " ¬ äå ú"ç"Ó/""rèÆ¡]Õ0Ö󷺡¡ ³ p S ×Lx±º¡]+ ³v+ízÒ¦¬fÌaÍÎØÙÚ »ÛÜÝË"úÆ¡ ×¹"º»½¼¿¾9ÀÁ»ÓÔjÒ]+Ç¥ Ä Þß Ê¬àá0âfãâ/ Þßä åæ0ç èêéëÞß(B) No.17760349 ì £&¡íîï#Ó\ e ®+Ƕ¶ ðñòvóÆ¡Ç
ôöõø÷¥ù1) R.W. Brockett. Asymptotic stability and feedback stabilization.
In Differential Geometric Control Theory, Vol. 27, pp. 181–191.Springer Verlag, 1983.
2) úüû . ýÿþ – –. / !" / #$ , Vol. 45, No. 9, pp. 536–543, 2001.
3) %& , ú û , ' . () * !" ,+.- /01 2435687 359:<; = !" – > ?A@BC!" 7D8EFHGJILKNMPO !" QR –. STVUXW !" YZ[ \] , Vol. 38, No. 10, pp. 839–844, 2002.4) ^ _` , ab , ced . () * !"gf ýþP hi4 P435A9 :j; i !" – 4 kl 74* !" monqp4rs . t 33 u!" v[ 6wx,yi , pp. 363–366, 2004.5) R.M. Murray. Nilpotent basis for a class of nonintegrable distri-
butions with applications to trajectory generation for nonholonomicsystems. Math. Contr. Signals, Syst., pp. 58–74, 1994.
6) ú û . zPf * !" m +8-/ ýþ| | !" . ST nX!" , Vol. 42, No. 10, pp. 841–846, 2003.7) c . ý~!="k – W ii48 !=" –. A , 2000.8) A.M. Bloch. Nonholonomic Mechanics and Control, Vol. 24 of In-
terdisciplinary Applied Mathematics (IAM). Springer Verlag, 2004.9) J. Ostrowski and J. Burdick. The geometric mechanics of undu-
latory robotic locomotion. The International Journal of RoboticsResearch, Vol. 17, No. 7, pp. 683–701, 7 1998.
10) P. Prautsch and T. Mita. Control and analysis of the gait of snakerobots. In International Conference of Control Applications, pp.502–507, 1999.
11) K. Nomizu and S. Kobayashi. Foundations of Differential Geome-try. John Wiley & Sons, 1963.
12) . Y . Z , 1987.