Embed Size (px)
Citation preview

Matchings in Connection with Ground DelayProgram Planning
Michael BallRobert H. Smith School of Business and Institute for Systems Research, University of Maryland, College Park,Maryland 20742
Geir DahlCentre of Mathematics for Applications, University of Oslo, Oslo, Norway
Thomas VossenLeeds School of Business, University of Colorado, Boulder, Colorado 80309
In this article we analyze certain matching problems thatarise in ground delay program planning. Ground delayprograms are air traffic flow management initiatives putin place when airport arrival demand is expected toexceed arrival capacity for an extended length of time,e.g. 4 h. Most of the problems we study can be modeledas assignment problems, where flights are assigned toarrival slots. In the context we analyze, however, theseproblems have important special structure, which allowsus to develop special solution properties. In particu-lar, solutions are measured both in terms of efficiency(delay minimization) and equity (delay distribution). Weshow that the theory of majorization provides a powerfultool in addressing solution equity. We consider problemswith flight deletions and develop special solution proper-ties and parametric methods. © 2008 Wiley Periodicals, Inc.NETWORKS, Vol. 53(3), 293–306 2009
Keywords: ground delay programs; matching; majorization
1. INTRODUCTION
In this article we study certain problems related to theassignment of flights to airport arrival slots. These prob-lems arise in the context of ground delay programs (GDPs),which are traffic flow management initiatives put in place inthe U.S. when airport arrival demand is expected to exceedarrival capacity for an extended length of time, e.g. 4 h; seeBall et al. [3] for background. GDPs are usually instituted in
Received October 2006; accepted July 2008Correspondence to: T. Vossen; e-mail: [email protected] grant sponsor: National Center of Excellence for Aviation Opera-tions Research; Contract grant numbers: 96-C-001 (FAA Research Grant)and DFTA03-97-D00004DOI 10.1002/net.20272Published online 10 October 2008 in Wiley InterScience (www.interscience.wiley.com).© 2008 Wiley Periodicals, Inc.
response to weather conditions at an airport, which substan-tially reduce visibility. Thus, this assignment applies only tothe day in question and can rely on an existing publishedschedule giving arrival times for each flight. Flights will beassigned arrival slots no earlier than their scheduled arrivaltimes so that, in the typical case of a strictly later assignment,the flight will be assigned an arrival delay. This delay willbe converted to a departure delay (ground delay). The neteffect is that flights will be delayed on the ground at theirorigin airport so that when they arrive at the destination air-port they can immediately land, incurring little or no airbornedelay. Some of our results also apply to a recently developedinitiative for managing U.S. air traffic: the airspace flow pro-gram (AFP). In this case, a volume of congested airspace(flow constrained area, FCA) is isolated and all flights thathave filed flight plans through that airspace during a timehorizon of interested are identified. Slots are defined at theboundary of the FCA and a GDP-like assignment is carriedout.
The basic inputs to the problems we study are a set offlights and a set of slots, together with certain informa-tion that restricts the flight-to-slot assignments. Generally,these problems can be modeled and solved as simple flight-to-slot assignment problems. Our goal in this article is toinvestigate the special structure of these problems to pro-duce insights into the corresponding structure of the solutionsand their properties. Although equitable assignments are ofinterest, simple assignment problem models may not be ableto adequately represent the problem and our deeper analy-sis produces the needed solution properties. Additionally, insome cases, we are able to give very simple, e.g. greedy,solution algorithms.
There are two perspectives relative to solving these prob-lems. First, the air traffic service provider (the ATSP inthe U.S. is the Federal Aviation Administration (FAA)) is
NETWORKS—2009—DOI 10.1002/net

responsible for managing the airspace safely, while limitingdelays and maximizing throughput. In addition, the airspaceuser (ASU’s consist of airlines and general aviation users) hasits own internal objectives, generally related to minimizingoverall delays for its flight subset. The ATSP must considerissues related to equitably balancing resources among theASU’s, whereas each ASU seeks to optimize its own inter-ests. Although the ATSP must allocate all available slots to allflights (when possible), the ASU will formulate a problem ofreallocating the slots it has been given among its own flights.
Section 2 gives the underlying model we analyze, mostimportantly, it defines the flight allocation graph, whichis a structured bipartite graph that represents our prob-lem. Section 3 describes Glover’s Algorithm and ModifiedGlover’s Algorithm, which are used extensively in findingsolutions of interest in the flight allocation graph. Section4 gives solution properties of interest to us. It presents def-initions and results related to both delay minimization andequity, the two solution criteria of interest to us. Our resultsgenerally fall into two categories. In Section 5, we treat thecase where all flights are allocated a slot. This is generallythe assumption for modeling ATSP planning of a GDP sincean ATSP cannot cancel a flight, i.e. the ATSP must allocatesome (possibly very late) airport arrival slot to each flight.The models of Section 6, explicitly consider the problem ofselecting which flights should be allocated a slot and whichshould not. We say that a flight not allocated a slot is deleted.Such problems apply when an ASU plans its response to aGDP and it considers flight cancellations, which correspondto flights not allocated any slot. In addition, when an ATSP isplanning an AFP, it has the prerogative of not allocating slotsto certain flights–in this case, it is not cancelling the flight,rather it is just prohibiting the flight from passing through avolume of airspace. The ASU would then have the choice ofrerouting that flight around the FCA or cancelling the flight.The results of Section 6 provide parametric solutions to flightdeletion problems. These should be quite useful in decisionsupport as it can be difficult to objectively evaluate a-priorithe cost of deleting a flight versus the cost of additional delayto several others.
Our work uses as a starting point the work done by Vossenand Ball [11]. Some of the results in Sections 3–5 can beviewed as reinterpretation within a graph context of resultsin Vossen and Ball [11]. However, some important new ideasand results are provided, including the use of majorizationtheory and its importance in measuring equity, the relation-ship to Schur-convexity and its implications, and use of forkmatchings. All of the results on flight deletions given inSection 6 are new.
2. THE MODEL
The underlying model we consider consists of a bipartitegraph G = (V , E) with vertex set V = F ∪ S and edge setE. We call G the flight allocation graph. The vertex set ispartitioned into the set of flights F and the set of arrival slotsS. We let F = {f1, f2, . . . , fm} and S = {s1, s2, . . . , sn}, and
define the index sets I = {1, 2, . . . , m} and J = {1, 2, . . . , n}.We also let T(fi) denote the (original) scheduled arrival timeof flight fi (i ∈ I), and denote the start time of slot sj by T(sj).
We assume that flights are ordered according to theirscheduled arrival times so that
T(f1) ≤ T(f2) ≤ · · · ≤ T(fm).
Moreover, slots are ordered in the natural (time-based) way,that is,
T(s1) ≤ T(s2) ≤ · · · ≤ T(sn).
Every flight fi (i ∈ I) has an earliest possible arrival timeEATi which is no earlier that the scheduled arrival time T(fi),i.e., T(fi) ≤ EATi. We may have strict inequality here; forinstance, a mechanical problem may cause a flight delay.Moreover, we assume that there is a maximum delay di, spec-ified for each flight fi, so that any flight that is delayed morethan di will be deleted. Thus, for each flight fi we can defineits earliest slot j(i) and latest slot j′(i) as
j(i) = min{j ∈ J : T(sj) ≥ EATi} and
j′(i) = max{j ∈ J : T(sj) ≤ T(fi) + di}.With these assumptions, a flight fi may be allocated to a slotsj if and only if j(i) ≤ j ≤ j′(i). The edges in the bipartitegraph G correspond to possible flight-slot allocations, so
E = {[fi, sj] : j(i) ≤ j ≤ j′(i), i ≤ m}.The bipartite flight allocation graph G has a special structure:for each i ≤ m the set of neighbor nodes of node fi is an inter-val of consecutive nodes in S (with the mentioned ordering ofS). The neighbors of a node sj, however, may not be an inter-val because a flight with early scheduled arrival time may bemore delayed than a flight with later scheduled arrival time.In Section 5.3, we consider the special case when such mixeddelays do not occur and each node sj is adjacent to an intervalof nodes in F.
Our focus is on flight allocations and their delay properties.A flight allocation is a function that associates (some or all)flights with (permitted) slots in such a way that each flightis allocated to at most one slot and no more that one flightis allocated to a slot. Thus, an allocation corresponds to amatching in G.
In the course of our analysis we will consider variousspecial cases of the model described.
No delay bounds: Here, di = ∞ for all i. This assumptionis not unusual for all problem perspectives, particularlythe ATSP perspective, because the ATSP generally seeksto put few restrictions on possible allocations.
Constant delay bounds: Here, di = d for all i. Thisassumption is reasonable for certain ATSP problems,where the ATSP seeks to treat all ASU’s equitably.
Weakly increasing j′(i): Here, i ≤ k implies j′(i) ≤ j′(k).This is a generalization of the constant delay boundsassumption and clearly covers no delay bounds as well.
294 NETWORKS—2009—DOI 10.1002/net

No internal delay allowance: Here, T(fi) = EATi. Thismodel is sometimes considered by ATSP, even thoughunder this assumption, it is possible to produce infeasi-ble flight-to-slot assignments. However, such allocationsmay be considered more equitable and are still useful tothe ASU’s because unusable slots can be traded for usablelater slots using the GDP mechanisms (see Vossen andBall [11, 12]).
Weakly increasing j(i): Here, i ≤ k implies j(i) ≤ j(k).This is a generalization of the no internal delay allowanceassumption that covers a broader class of inputs.
We refer to Vossen and Ball [11] for a detailed a descrip-tion and analysis of ground delay program algorithms. TheRation-By-Schedule (RBS) algorithm gives an initial assign-ment based on the scheduled times of arrival. Because of flightcancellations and other flight delays, this schedule mightcontain infeasible flight assignments. To address this pos-sibility, the Compression algorithm carries out exchanges ofslots among airlines. Slots assigned to cancelled flights thatare otherwise unusable by the owner/airline are exchangedfor later slots to which that airline can assign one of itsflights.
3. MAXIMUM MATCHINGS AND GLOVER’SALGORITHM
Consider the problem of finding a maximum match-ing in the flight allocation graph G. The bipartite graph Ghas a very simple structure: the neighbors of node fi aresj(i), sj(i)+1, . . . , sj′(i). Thus, the neighbors of fi form an inter-val (consecutive nodes). A bipartite graph with this propertyis called convex on S. Glover [7] found a simple algorithmfor finding a maximum matching in a bipartite convex graph(see also Asratian et al. [1], section 5.3).
Glover’s algorithm:
Step 1: Start with M = ∅.
Step 2: for j = 1, 2, . . . , n choose, if any, a free neighbor fiof sj with j′(i) minimal and add [fi, sj] to M.
We also propose a modification, called Modified Glover’sAlgorithm, where in Step 2, we choose a neighbor node fiwith i minimal. We note that with the weakly increasingin j′(i) assumption, this change represents a specializationof Glover’s algorithm. Specifically, it is Glover’s algorithmwith a tie breaking rule for the case where multiple eligibleneighbors i have the same value of j′(i). While we allow forT(fi′) = T(fio) for i′ �= io, when the flight ordering is pro-duced we assume a deterministic rule is used to break “ties,”implying that the output is Modified Glover’s Algorithm isunique (this is equivalent to assuming that the Ti are distinct).We note that Modified Glover’s Algorithm can be viewed asa reinterpretation of RBS as defined in Vossen and Ball [11]and Wambsganss [13].
FIG. 1. Glover’s algorithm.
The correctness and efficiency of Glover’s algorithm isgiven by the following Theorem (see Asratian et al. [1] orGlover [7] for a proof.)
Theorem 1. Given a bipartite graph G = (F, S, E) thatis convex on F, Glover’s algorithm will find a maximummatching in G in O(|V | + |E|) steps.
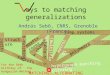
An illustration of the algorithm is shown in Figure 1. Thehorizontal line at the bottom corresponds to S and each inter-val above corresponds to a vertex fi and shows the intervalj(i), j(i)+1, . . . , j′(i). Each solid circle corresponds to an edgein the maximum matching found by Glover’s algorithm. Weremark that a linear time algorithm for finding a maximummatching in a convex bipartite graph was described in Steinerand Yeomans [10].
On the Basis of our earlier remarks, the following corollaryimmediately follows.
Corollary 2. Given a flight allocation graph with j′(i)weakly increasing. Then Modified Glover’s Algorithm findsa maximum matching.
We point out one further important property of Glover’sAlgorithm. A bipartite graph G = (F, S, E) that is convex onS remains convex when nodes are deleted from S in reverseorder, so that Glover’s Algorithm finds a maximum matchingfor G restricted to all ordered subsets of S. Given a flight allo-cation graph, G, and Sk = {s1, . . . , sk} we define G restrictedto Sk to be the flight allocation graph obtained by delet-ing nodes {sk+1, . . . , sn} and all adjacent edges. A matchingrestricted to Sk is defined in a similar way.
Corollary 3. Let G be a flight allocation graph and let M bea matching obtained by Modified Glover’s Algorithm. Thenfor any k, M restricted to Sk is the maximum matching for Grestricted to Sk.
This property will be quite useful when analyzing funda-mental properties of delay-minimizing solutions in Section4.1.
4. SOLUTION CRITERIA AND PROPERTIES
Both the ATSP and the ASU’s have an obvious objective inany allocation: minimizing delays. However, there are certainnuances in both cases, that require more careful considerationof specific objective functions. The ATSP must allocate slotsto multiple sometimes-competing entities. As such there is asignificant concern with insuring equity in such allocations.
NETWORKS—2009—DOI 10.1002/net 295

From the ASU perspective, it is typically the case that the costof operating a flight can grow nonlinearly with delay so thatsimply minimizing total flight delay might not be the bestpolicy. We will use two generic objectives: efficiency andequity. We will use total delay as a measure of efficiency;basic solution properties are given in Section 4.1. It can bedifficult to get a simple generally accepted measure of equity.In Section 4.2, we will first discuss a strong solution conceptand then define a related equity metric.
4.1. Properties of Delay-Minimizing Solutions
We now define some notation to define the delay associ-ated with a matching M in G. We denote by F(M) the flightscovered by M and S(M) the slots covered by M. M definesa mapping, also denoted by M, of F(M) into J in the naturalway where M(i) = j whenever M contains the edge [fi, sj].Recall that the scheduled time of fi is T(fi) and the start timeof slot sj is T(sj) so that the delay dM(i) of flight fi under theallocation M equals
dM(i) = T(sM(i)) − T(fi),
and this delay is clearly nonnegative.To define an efficiency (delay) measure that takes into
account deleted flights, we associate with each deletedflight, a cost, �, measured in delay minutes. Thus, the costassociated with any allocation (matching) M is:
D�(M) =∑
i∈F(M)
dM(i) + |F − F(M)|�
=∑
j∈S(M)
T(sj) −∑
i∈F(M)
T(fi) + |F − F(M)|�
The important property of this delay function is that the totaldelay depends only on the set of flights assigned to a slot(F(M)) and the set of slots assigned a flight (S(M)). Herewe will describe properties for the case where F(M) = F. InSection 6, we investigate problems involving flight deletions.
When F = F(M), in the expression for D�(M), |F −F(M)|� = 0 and
∑i∈F(M) T(fi) is constant so that minimiz-
ing D�(M) is equivalent to minimizing∑
j∈S(M) T(sj). Theunderlying combinatorial problem can be stated as follows:we are given a weight T(sj) for each sj ∈ S and we wish tofind a minimum weight subset S′ of S such that there exists aperfect matching between S′ and F. The problem of findingsuch an S′ is the problem of finding a minimum weight basisin a transversal matroid (see Brualdi [4], Welsh [14]). Thisoptimization problem can be solved via the following Greedyalgorithm:
Greedy-Slot:
Step 0: Let G be a flight allocation graph for which thereexists a matching M with F(M) = F. Set S′ = ∅ and j = 0.
Step 1: Set j = j + 1. If there exists a matching between Fand S′ ∪ {sj} that covers S′ ∪ {sj} then set S′ = S′ ∪ {sj}.If |S′| = |F| then stop; otherwise, repeat step 1.
Matroid greedy algorithms (Edmonds [5], Welsh [14]) forfinding minimum weight bases must add elements in orderof increasing element weight. The order previously specifiedfor the slots implies that this is carried out in step 1. Wedenote such a delay minimizing subset of S by S∗(G). S∗(G)
can be simply characterized. To do so, we first define somenotation. Given a set {1, 2, . . . , k} and two subsets U1 and U2
of {1, 2, . . . , k}, we say that U1 is lexicographically greaterthan or equal to U2, denoted by U1 L U2 if i′ ∈ U1 wherei′ = min{i : i ∈ U1 ∪ U2 but i �∈ U1
⋂U2}. It can easily be
seen that
S∗(G) L S′ for all S′ = S(M) for some matching M.
This property leads directly to the following result.
Proposition 4. Let M be an arbitrary maximum matchingin G. Then
(i) |S(M) ∩ {s1, s2, . . . , sj}| ≤ |S∗(G) ∩ {s1, s2, . . . , sj}| for1 ≤ j ≤ n.
(ii) max{j : sj ∈ S(M)} ≥ max{j : sj ∈ S∗(G)}.
Property (i) implies that it is impossible to let more flightsarrive up to any point in time than the number that arriveunder an M∗ with S(M∗) = S∗(G). Property (ii), on the otherhand, states that the total “time span” used under S∗(G) issmallest possible. In other words, max{j : sj ∈ S∗(G)} is thesmallest number of slots needed for a full flight allocation toexist.
Greedy-Slot as presented could be implemented so thata matching between F and S′ is always maintained. Thus,Step 2 could be implemented by finding a single augmentingpath that requires O(|E|) time giving overall complexity ofO(|E||V |). However, it follows directly from Corollary 3 thatS∗(G) is naturally produced by Glover’s algorithm:
Proposition 5. Let G be a flight allocation graph for whichthere exists a matching M with F(M) = F and let M be thematching produced by Glover’s algorithm. Then, S(M) =S∗(G).
We now wish to show a further property of delay mini-mizing matchings. We first assume that some flight can bematched to the first slot, s1 (otherwise we could delete earlyslots without changing the basic problem structure).
Denote by INT [j, j′] the sequence of consecutive integersbetween two integers j and j′ with j ≤ j′. Note that S∗(G) canbe written as a sequence of intervals:
INT [j1 = 1, j1], INT [j2, j2], . . . , INT [jq, jq],
where for each �, j� + 1 ≤ j�+1 − 1 so that [j� + 1, j�+1 − 1]is also an interval, which we call a “gap”. We denote by S+
[�]the �th interval in the partition of S∗(G) and S−
[�] the next
adjacent gap. Thus, S∗(G) = S+[1] ∪ S+
[2] ∪ . . . ∪ S+[q] and
S = S+[1] ∪ S−
[1] ∪ S+[2] ∪ S−
[2] ∪ . . . ∪ S+[q] ∪ S−
[q].
296 NETWORKS—2009—DOI 10.1002/net

FIG. 2. Graph partition associated with delay minimizing matching.
We now claim that in any delay minimizing matching M,for any �, it must be the case that all of the fi matched to aslot in S+
[�] must have j� ≤ j(i) ≤ j�. Clearly, j(i) ≤ j� other-
wise fi would not be adjacent to a slot node in S+[�]. However,
additionally j� ≤ j(i) because, otherwise a matching with alexicographically smaller S(M) could be obtained by match-ing some flight in F(S+
[�]) to a slot in the gap S−[�−1]. Thus,
the slot partition of S∗(G) leads naturally to a flight partitionas well. That is, if we define F+
[�] = {fi : j� ≤ j(i) ≤ j�}, wesee that any delay minimizing maximum matching can bepartitioned into a set of maximum matchings between eachof S+
[�] and F+[�]. Figure 2 illustrates this structure.
4.2. Equitable Allocation
Many challenges exist in measuring equity of allocations.On the other hand, there is a rich history related to fairallocation schemes and much experience to build upon (seeYoung [15]). One specific challenge is that it can be diffi-cult to develop simple linear expressions (objective functions)because the relative performance of various players is usuallyan important consideration. We introduce a partial order onthe set of allocations that allows comparison of equity levels.
4.2.1. Majorization. We now introduce the concept ofmajorization and show that it provides an effective tool foranalyzing equity in delay allocation. Majorization has beenfound to be very useful in the study of different inequalities inmathematics and statistics. The classic reference in this areais the book by Marshall and Olkin [9].
Majorization is an ordering (actually a preorder) of pairsof vectors. It reflects that the components of one vector aremore evenly distributed than the components in the othervector. One says that a vector x = (x1, x2, . . . , xn) is weakly
majorized by y = (y1, y2, . . . , yn) if the following inequalitieshold:
k∑
j=1
x[j] ≤k∑
j=1
y[j] (k ≤ n).
Here x[j] denotes the jth largest component in x, so x[1] ≥x[2] ≥ · · · ≥ x[n]. We write x ≺w y if x is weakly majorizedby y. If the equation holds and also
∑j xj = ∑
j yj, then onesays that x is majorized by y and denote this by x ≺ y. Abasic result from majorization theory is a theorem by Hardyet al. [8] which says that x ≺ y if and only if x = yA for somen×n doubly stochastic matrix. Recall that A is called doublystochastic when it is nonnegative and all row and columnsums are 1.
Majorization ideas provide a natural way to considerequity in delay allocations. Generally, when delays must beimposed it is desirable to distribute those delay evenly amongthe affected parties. In this case the “affected parties” couldeither be defined to be individual flights or ASU’s. Here webase our analysis on individual flights; we leave analysis ofthe ASU (airline) case to a future paper. In this section wecontinue to assume that F = F(M) so that M is of size m.The delay associated with a matching M may be organizedinto the delay vector
dM = (dM
1 , dM2 , . . . , dM
m
).
Each delay vector dM is nonnegative and has length m. We areinterested in the mapping M → dM . Hereafter, by a matchingin G we shall mean a maximum matching, i.e., a matching ofsize m, and we let M denote the set of all such matchings.We now define a certain ordering on M.
Definition 6. Let M, N ∈ M. We say that M is majorizedby N, and denote this by M ≺ N, provided that dM ≺ dN ,i.e., the delay vector dM is majorized by the delay vector dN .The notion of of weak majorization is defined similarly, i.e.,M ≺w N whenever dM ≺w dN .
This majorization ordering is a preorder on M, i.e., thefollowing holds for all M, N , K ∈ M:
• M ≺ M (reflexive),• if M ≺ N and N ≺ K , then M ≺ K (transitive).
Weak majorization satisfies the same properties. The moti-vation for our definition is that it seems natural to prefer thematching M to another matching N when the delays of flightsunder the allocation M is more evenly distributed than underN . This is based on the assumption that there are no pref-erences among the flights, so ideally one would like equaldelays on the flights, and clearly also this delay to be smallestpossible.
We are interested in matchings that are small in this(weak) majorization order. Thus, we would like to find algo-rithms that produce majorization-minimal matchings. In thisconnection a certain interchange operation is useful.
NETWORKS—2009—DOI 10.1002/net 297

Theorem 7. Let N ∈ M and let 1 ≤ i < k ≤ m. Assumethat j(i) ≤ M(k) < M(i). Let N be obtained by interchangingi and k, meaning that N(i) = M(k), N(k) = M(i), andN(r) = M(r) (r �= i, k). Then M ∈ M and M ≺ N.
Proof. First, N is also a maximum matching in G as|M| = |N | and both [fi, sM(k)] and [fk , sM(i)] are edges in Ebecause j(i) ≤ M(k). Then the ith and kth components of thedelay vectors dM and dN are given by
dMi = T(sM(i)) − T(fi), dM
k = T(sM(k)) − T(fk),
dNi = T(sM(k)) − T(fi), dN
k = T(sM(i)) − T(fk).
Therefore, dN is obtained from dM by subtracting δ :=T(sM(i)) − T(sM(k)) from the ith component and adding δ
to the kth component. Note that δ > 0 as M(i) > M(k)
implies that T(sM(i)) > T(sM(k)). Moreover
dMi − dM
k = (T(sM(i)) − T(fi)) − (T(sM(k)) − T(fk))
= δ + (T(fk) − T(fi)) > δ,
as T(fk) > T(fi) (recall that k > i). Let λ = (dMi − dM
k −δ)/(dM
i − dMk ). Then 0 < λ < 1. Define the m × m matrix
A = [aij] as follows: aii = akk = λ, aik = aki = 1 − λ,arr = 1 for all r ≤ m, r �= i, k, and all other entries of A arezero. This matrix is doubly stochastic. Moreover, a simplecalculation now shows that
dM = dN A.
Thus, by the mentioned theorem by Hardy, Littlewood, andPólya, we conclude that dN ≺ dM . So M ≺ N as desired. ■
The content of the theorem is that, under the mentionedassumptions, the interchange will make the delays of flightsfi and fk more equal (that is, the difference between thedelays of flights fi and fk decreases) while other delays remainunchanged. These interchanges can be inferred based solelyon the structure of the graph G (via the mapping i → j(i)and i → j′(i)), so that the information about the originalscheduled arrival times Ti (i ≤ m) is not necessary. It isinteresting to note that the nonexistence of such exchanges isgiven as a general characteristic of equitable allocations (seeYoung [15], p 77).
Theorem 7 provides an approach to improving a givenmatching from the perspective of majorization (and equity).It would then be natural to ask whether a globally “best” per-fect matching exists. We call a matching M∗ ∈ M such thatM∗ ≺ N for all N ∈ M an M-best matching. In Section5 we will investigate conditions under which an M-bestmatching exists. Before addressing this question, we developrelationships between majorization and Schur-convexity.
4.2.2. Schur-convexity and the OPTIFLOW model.Theorem 7 may be used to establish inequalities involvingdelay vectors. A function φ : IRm+ → IR is called Schur-convex (on IRm+) if φ(x) ≤ φ(y) whenever x, y ∈ IRm+ and
x ≺ y. Schur-convexity is discussed in detail in Chapter 3 ofMarshall and Olkin [9] and several classes of Schur-convexfunctions are established. An important class of Schur convexfunctions consists of functions φ given by
φ(x) =m∑
j=1
f (xj),
where f : IR → IR is a convex function. Actually, a theoremof Schur, and of Hardy et al. [8,9], says that x ≺ y if and only if∑m
k=1 f (xk) ≤ ∑mk=1 f (yk) for all convex functions f : IR →
IR. A similar theorem (see also Marshall and Olkin [9]) holdsfor weak majorization: x ≺w y if and only if
∑mk=1 f (xk) ≤∑m
k=1 f (yk) for all nondecreasing convex functions f : IR →IR. When these results are combined with Theorem 7, oneobtains the following result.
Corollary 8. Let f : IR → IR be a nondecreasing convexfunction. Let M be a maximum matching in G where i andj are out of order for some pair i, j and let N be defined asin Theorem 7; let M∗ be an M-best matching (if one exists).Then
m∑
k=1
f(dM∗
k
) ≤m∑
k=1
f(dN
k
) ≤m∑
k=1
f(dM
k
).
More generally, if φ : IRm+ → IR is nondecreasing and Schur-convex, then φ(dM∗
) ≤ φ(dN ) ≤ φ(dM).
Some examples of Schur convex functions that may be ofinterest in this connection are:
1. φ(x) = ∑j f (xj) where f (x) = (x − α)+ for α ≥ 0;
2. φ(x) = ∑j f (xj) where f (x) = xα for α ≥ 1;
3. φ(x) = ∑sk=1 x[k] for some positive integer s;
4. φ(x) = ∑mk=1(xj − x)2 where x = (1/m)
∑j xj .
In example 1 the inequalities in Corollary 8 involve thesum of delays above the threshold value α. And in example2 one wants to avoid long delays by using the terms dα
j . Inexample 3 one sums the s largest delays and in example 4 wehave the variance of the delay vector.
A basic model for finding flight allocations is the OPTI-FLOW model introduced in Ball et al. [2] and furtherinvestigated in Vossen and Ball [11]. In this model, the allo-cation of flight is formulated as an assignment problem wherethe cost of assigning a flight fi to slot sj is defined as
cij = wi(T(sj) − T(fi))1+ε .
Consider now the case when all weights are one, wi = 1(i ∈ M), so there are no preferences among the flights. Let Mbe a maximum matching in G. Its incidence vector x = χM isthen feasible in the OPTIFLOW model and the correspondingvalue of the objective function is
∑
i
∑
j
cijχMij =
∑
i
ci,M(i) =∑
i
(dM(i))1+ε .
298 NETWORKS—2009—DOI 10.1002/net

The function f (x) = x1+ε is nondecreasing and convex,so the objective function is Schur-convex. Thus Corollary 8may be applied and, in particular, we conclude that the M-best matching is optimal in the OPTIFLOW model. Thus, thedevelopment above casts light on the structure of an optimalsolution of the OPTIFLOW model in the case with wi =1. Moreover, the partial ordering of delay vectors given bymajorization shows additional properties of the relationshipbetween different flight allocations.
5. ALLOCATIONS THAT COVER ALL FLIGHTS
In this section we investigate allocations that cover allflights, i.e. matchings with F(M) = F. Section 5.1 treats thecase of a general flight allocation graph. Although, delay-minimizing matchings can be found by solving an appropriateassignment model, we show that in general an M-best match-ing does not exist. In Section 5.2 we treat the case of weaklyincreasing j′(i) and show that modified Glover’s algorithmalways produces an M-best matching. We then analyze aparticularly elegant solution for a special case: fork match-ings (Section 5.3). Section 6 will cover the case with flightdeletions.
5.1. General Flight Allocation Graphs
For the case of a general flight allocation graph we canfind a delay-minimizing perfect matching by finding S∗(G) asdescribed in Section 4 and then finding any perfect matchingbetween F and S∗(G). Ideally, one would like to find such aperfect matching that is M-Best. However, the example givenin Figure 3 provides a 3-by-3 flight allocation graph, Gc, forwhich no M-Best perfect matching exists. Gc contains threeperfect matchings. Each of M2 and M3 can be obtained fromM1 by executing a 2-by-2 exchange as described in Theorem7. The ordered delay vectors for M1, M2, and M3 are (5,3,1),(5,2,2), and (4,4,1), respectively. Note that M2 ≺ M1 andM3 ≺ M1 but M2 and M3 are noncomparable with respect tomajorization. It is also clear that no majorization-improvingexchanges can be executed on either M2 or M3. In that sense,these two matchings represent “local optima”.
5.2. Allocations Produced by Modified Glover’s Algorithm
We now show that Modified Glover’s algorithm producesan M-best matching for the case of weakly increasing j′(i).
Theorem 9. Let G be a flight allocation graph with j′(i)weakly increasing in i and such that there exists a matchingthat covers all flights. Let M∗ be the matching produced byModified Glover’s algorithm. Then
M∗ ≺w M for all M ∈ M,
i.e. M∗ is an M-best matching.
Proof. Let M ∈ M be an arbitrary matching that coversF but that was not produced by Glover’s algorithm. Then we
FIG. 3. Flight allocation graph with two matchings that cannot beimproved using 2-by-2 exchanges: M1 : {[f1, s3], [f2, s2], [f3, s1]}, dM1 =(5, 3, 1); M2 : {[f1, s3], [f2, s1], [f3, s2]}, dM2 = (5, 2, 2); M3 :{[f1, s2], [f2, s3], [f3, s1]}, dM3 = (4, 4, 1).
know for some j, M(i) = j and there exists an i′ with j′(i′) <
j′(i) and M(i′) > j. Since j′(∗) is weakly increasing, it followsthat i′ ≤ i and if the assignments of i and i′ are interchangedto produce a new matching M ′ ∈ M then, by Theorem 7,we have that M ′ ≺w M. Now, this process can be repeateduntil the M∗ produced by Modified Glover’s Algorithm isobtained. By the transitivity of ≺w, it follows that M∗ ≺w M.Because we can start this process with an arbitrary M andalways end up with the M∗ produced by Modified Glover’sAlgorithm, it must be that M∗ is M-best. ■
Corollary 10. Let G be a flight allocation graph with j′(i)weakly increasing in i and such that there exists a matchingthat covers all flights. Then G contains an M-Best matching.
We note that the “core” inputs to ground delay program-ming planning problems are the T(fi) and T(sj). On the otherhand, j′(i) can be viewed as a type of “control knob” thatcan be set based on various criteria. This Corollary and thecounter-example given in Section 5.1 suggest that, in orderto guarantee the existence of equitable allocations, any suchcriteria should insure that j′(i) is weakly increasing.
5.3. A Special Case: Fork Matchings
In this section we consider a special case of our generalmodel where we have that both j′(i) and j(i) are weaklyincreasing functions of i. The domain of relevance of theseassumptions was discussed in Section 2. We denote this spe-cial case by FORK. A bipartite graph with color classes Uand W is called doubly convex if it is convex on both U andW (after suitable ordering of the nodes).
Lemma 11. In the FORK situation the graph G is doublyconvex.
Proof. To prove the result we must take an arbitrary jand show that the neighbors of sj form an interval. For sucha j, let fio and fi∗ be the neighbors with min and max i values
NETWORKS—2009—DOI 10.1002/net 299

respectively and let fi′ be an arbitrary flight node with io ≤i′ ≤ i∗. To prove the result we must show that fi′ is a neighborof sj. Since io and i∗ are neighbors we have:
j(io) ≤ j ≤ j′(io); j(i∗) ≤ j ≤ j′(i∗),
and since j(i) and j′(i) are weakly increasing we have
j′(io) ≤ j′(i′); j(i′) ≤ j(i∗).
Putting these together we have:
j(i′) ≤ j(i∗) ≤ j ≤ j′(io) ≤ j′(i′),
which implies fi′ is adjacent to sj and the result follows. ■
We want to find a maximum matching in G that cov-ers all flights. Because the graph is convex we may useModified Glover’s algorithm and the results of the previ-ous section apply. However, the very special doubly convexstructure of G makes it possible to determine a maximummatching explicitly. We should note that the construction wenow describe assumes that a matching covering all flightsexists. Specifically, this construction is not guaranteed tofind a matching covering all flights for any doubly convexgraph. The following terminology will be convenient. Leti ∈ I and let ti be the largest nonnegative integer such thatj(i + k) ≤ j(i) + k ≤ j′(i + k) for all 0 ≤ k ≤ ti. Thus Econtains the edges
[fi, sj(i)], [fi+1, sj(i)+1], . . . , [fi+ti , sj(i)+ti ].This edge set is called a fork and it is denoted by F(i). More-over, we define I(i) = {i, i + 1, . . . , i + ti}. Let F∗ be thefollowing union of forks
F∗ = F(i1) ∪ F(i2) ∪ · · · ∪ F(ip),
where i1 = 1, it = |F(i1)| + · · · + |F(it−1)| + 1 (2 ≤ t ≤ p)
and m ∈ I(ip). Then F∗ is a maximum matching in G and wecall F∗ the fork matching. Moreover, F∗ is the matching thatwould be produced by the application of Modified Glover’sAlgorithm in the FORK situation. Thus, we have
Theorem 12. In the FORK situation, F∗ has the M∗properties given in Theorem 9 and Proposition 4.
Example 1. Figure 4 shows an example with m = 9, n =12. Part (i) shows the edges [fi, sj(i)] (i ≤ m) and part (ii)shows the fork matching F∗.
Consider again the fork matching F∗. It uses the slotsS(F∗). The slots S − S(F∗) are not used because the “nextflights” cannot arrive early enough. Thus, at the start of eachfork in F∗ one has caught up with the delays and is waiting forthe next group to arrive. If there are not too many cancelledflights, one may very well have a situation where F∗ consistsof a single fork.
Fork matchings exhibit a high degree of structure, whichallows them to be easily constructed, and which may lead tofurther useful properties.
FIG. 4. The edges [fi, sj(i)] and the fork matching.
6. MODELS WITH FLIGHT DELETIONS
In this section we consider problem instances where thestructure of G and the cost function D�(M) are such that min-imizing D�(M) implies that some flights must be deleted,i.e. F �= F(M). We consider two cases. Note from thedefinition of D�(M) that when � is sufficiently large, mini-mizing D�(M) implies that |F(M)| is maximized. This caseis treated in Section 6.1 and the more general case is treatedin Section 6.2. Section 6.3 extends these results to the caseof flight-specific flight deletion costs.
6.1. Optimally Deleting the Minimum Number of Flights
In this section we treat of the problem of finding an Mthat minimizes D�(M) assuming that � is “large.” We fur-ther assume that there does not exist a matching M withF(M) = F so that some flights must be deleted. However,for sufficiently large �, a solution that minimizes D�(M)
must minimize |F − F(M)|, i.e. maximize |F(M)|. Thus, wecan restrict out attention to maximum matchings in G and theoptimization problem becomes:
min∑
sj∈S(M)
T(sj) −∑
fi∈F(M)
T(fi)
s.t. M is a maximum matching in G.
In Section 4.2 we characterized a delay-minimizingS(M) = S∗(G) for the case where F could be covered bya matching. It is clear that this analysis carries over to thecase where we wish to cover an F ′ ⊂ F:
Proposition 13. Let G be a flight allocation graph andF ′ ⊂ F. Then, if M ′ is a matching with F(M ′) = F ′ that
300 NETWORKS—2009—DOI 10.1002/net

minimizes D�(M) then S(M ′) L S(M) for all matchings Mwith F(M) = F ′.
It is clear from the form of D�(M) for this case that, justas we seek to minimize
∑sj∈S(M) T(sj), we also seek to max-
imize∑
fi∈F(M) T(fi). It is also clear that the same argumentsthat imply Proposition 13 imply:
Proposition 14. Let G be a flight allocation graph andS′ ⊂ S. Then, if M ′ is a matching with S(M ′) = S′ thatminimizes D�(M) then F(M ′) �L F(M) for all matchingsM with S(M) = S′.
Here, lexicographically less than or equal to (�L) isdefined in an analogous way to L.
We extend the definition of S∗(G) to be the lexico-maximum S with S = S(M) for some maximum matchingM and define F∗(G) to be the lexico-minimum F with F =F(M) for some maximum matching M. Now it is clear that ifthere exists a maximum matching M∗ with S(M∗) = S∗(G)
and F(M∗) = F∗(G) then M∗ would minimize D�(M∗). Infact, such an M∗ does exist as we now show. The essentialresult is given by the following proposition.
Proposition 15. Let G be a flight allocation graph. LetF ′ = F(M ′) for some maximum matching M ′. Then, thereexists a maximum matching Mo such that F ′ = F(Mo) andS(Mo) = S∗(G).
Proof. Let M+ by the maximum matching with F ′ =F(M+) and such that S(M+) is lexicographically maximum.Now to prove the result by contradiction, we assume thatS(M+) �= S∗(G). Let sj′ be the minimum slot index whereS(M+) and S∗(G) differ, i.e. sj′ ∈ S∗(G) but sj′ /∈ S(M+),and for all j < j′, sj ∈ S∗(G) =⇒ sj ∈ S(M+). Now note thatthere can be no f ∈ F − F ′ adjacent to a slot in S − S(M+),otherwise M+ could trivially be increased in cardinality. Fur-ther, no f matched to a slot sj with j > j′ can be adjacent toa slot sj with j ≤ j′, otherwise, by the interval properties ofneighbors, such an f would be adjacent to sj′ and M+ could betrivially adjusted to create an M++ with S(M++) L S(M+).Now we know there is a matching M, that covers all slots inS∗(G)−{sj′+1, . . . ., sn}. By the above arguments this match-ing does not use any f matched to a slot sj with j > j′ in M+.Thus, this matching can be combined with those elements ofM+ adjacent to sj with j > j′ in M+ to obtain a matching ofcardinality one greater than |M+|. This contradicts that M+was maximum and the proof is complete. ■
Our main result now follows.
Theorem 16. Let G be a flight allocation graph. Then, thereexists a maximum matching M∗ with S(M∗) = S∗(G) andF(M∗) = F∗(G). Furthermore, M∗ minimizes D�(M∗).
It follows from Proposition 5 that Modified Glover’s algo-rithm produces a matching M with S(M) = S∗(G). Once
FIG. 5. Min cost matching that is not maximum.
S∗(G) is found, the following greedy algorithm can be usedto find F∗(G) and M∗.
Greedy-Flight:
Step 0: Let G be a flight allocation graph and assume thatS∗(G) has been found. Set F∗ = φ and i = m + 1.
Step 1: Set i = i−1. If there exists a matching, M∗, betweenS∗(G) and F∗ ∪ {fi} that covers F∗ ∪ {fi} then set F∗ =F∗ ∪ {fi}. If |F∗| = |S∗(G)| then stop; otherwise, repeatstep 1.
Greedy-Flight can be implemented by maintaining amatching between F∗ and S∗(G). Thus, Step 2 needs onlysearch for a single augmenting path, which requires O(|E|)time. The overall complexity then becomes O(|E||V |).
It can easily be seen that the structure of delay minimizingmatching identified in Section 4.1 applies in this more generalsetting. That is, a delay minimizing maximum matching M∗can be partitioned into delay minimizing maximum match-ings between each of S+
[�] and F+[�]. Note that in this case it can
be that |S+[�]| < |F+
[�]|. We should note that in general (when� is not large) total cost is not minimized by a maximummatching. This is demonstrated by the example in Figure 5.
6.2. A Parametric Approach to Flight Deletions
This section introduces a somewhat different approach toflight deletions. Specifically, we describe a procedure thatdetermines a delay-minimizing allocation given that exactlyL flights have to be deleted. The resulting procedure maybe viewed as a parametric optimization problem, and ourobjective is to determine how the allocation changes if L isincreased.
We assume that both j′(i) and j(i) are weakly increasingfunctions of i. Note that, according to Lemma 11, this impliesthat the flight allocation graph G is doubly convex. A generalmodel for this problem is as follows.
NETWORKS—2009—DOI 10.1002/net 301

P(L):
zP(L) = min∑
i∈I
T(fi)yi +∑
ij∈E
T(sj)xij
s.t.
yi +∑
j:ij∈E
xij ≥ 1(i ∈ I) (1)
∑
i:ij∈E
xij ≤ 1(j ∈ J) (2)
∑
i∈I
yi ≤ L (3)
xij ≥ 0, yi ≥ 0, (4)
where xij = 1 iff flight fi is assigned to slot sj, and yi = 1 iffflight fi is cancelled. For notational simplicity we write ij ∈ Ein place of [fi, si] ∈ E. We note that any optimal solution willsatisfy the first constraint at equality, however, an inequalityis used to simplify the development of dual solutions. Theobjective function follows since
∑
ij∈E
(T(sj) − T(fi))xij =∑
ij∈E
T(sj)xij −∑
i∈I
(1 − yi)T(fi)
=∑
i∈I
T(fi)yi +∑
ij∈E
T(sj)xij−∑
i∈I
T(fi),
where the last term represents a constant. Although theresulting optimization problem can be solved efficiently, ourfocus here is on the development of a greedy procedure thatprovides insight into structural properties of the resultingallocations.
We furthermore assume that the structure of G is such thatP(L) is feasible for any L ≥ 0, that is, we assume there existsa matching M such that F(M) = F. If this is not the case, wecan start by optimally deleting the minimum number of flightstogether with the unused slots using the algorithm of Section6.1 and then addressing P(L) using the greedy procedureto be described in the next section. The correctness of thisapproach follows from the following Theorem.
Theorem 17. Given a flight allocation graph, G, for anyL, there exists a solution to P(L) such that i) {fi ∈ F : yi =0} ⊂ F∗(G) and ii) {sj ∈ S :
∑i xij = 1} ⊂ S∗(G).
Proof. Let M∗ be a delay minimizing maximum match-ing and F∗(G) and S∗(G) be defined as before. We start byproving (ii). Suppose we have a solution, Mo, to P(L) thatcovers a slot not in S∗(G) and let si be the earliest such slot.Using the solution structure described in Section 4.1 and illus-trated in Figure 2, we can see that si must be in some gap S−
[�];further it is clear that the flight covering that slot must be con-tained in F+
[�′] for some �′ ≤ �. Now if we take the union ofM∗ and Mo, we obtain a union of cycles and alternating paths.si must be the end of an alternating path because it was notcovered in M∗. That alternating path will either end in a slot
node in (a) S+[�′] or (b) a flight node in F+
[�′] not covered by M∗.In case (a) we can improve Mo by performing an interchangethat preserves F(Mo) but exchanges si for a slot in S+
[�′], whichwould be lead to a lower delay solution—a contradiction tothe optimality of Mo relative to P(L). In case (b), we couldperform an interchange that would increase the cardinalityof M∗ contradicting that it was a maximum matching. Thiscompletes the proof of (ii).
Given that (ii) is true, in order to prove (i), we take asolution to P(L) and let S′ ⊂ S∗(G) be the corresponding setof covered slots. We know from our previous analysis thatfinding the best covering flight set is a matroid optimizationproblem so that this set, say F ′ is a max weight basis (flight setsuch that there is a matching between F ′ and S′). Thus, if oneconsiders the transversal matroid associated with the originalslot set, S∗(G), then F ′ is a max weight basis in the transversalmatroid associated with S′ a subset of S∗(G). It follows frombasic properties of transversal matroids (see Edmonds andFulkerson [6]) that F ′ can be extended to a max weight basisof the original transversal matroid. That is F ′ can be extendedto an optimal flight set F∗(G) (max weight basis) relative tothe entire graph G∗. ■
6.2.1. A Fork Refinement. Before constructing a greedyprocedure that solves P(L), we first refine the FORK char-acterization discussed in Section 5.3. As in the earlier case,this construction assumes that a matching covering all flightsexists (if not appropriate flights must be deleted first asdescribed in the previous section). We start with some nota-tion: let I(j) := {i ∈ I : j(i) = j}, and define r(j)(j ∈ J)
recursively as
r(1) := |I(1)|, r(j + 1) := (r(j) − 1)+ + |I(j + 1)|.Intuitively, r(j) may be interpreted as the number of flightsavailable for slot j, i.e., those that can use the slot and havenot been assigned a previous slot. Note that r(j) is generallynot monotone in j. In addition, we note that the definitionof r(j) may be used to provide an alternate characterizationof forks, by changing the condition j(i + k) ≤ j(i) + k tor(j(i) + k) > 0.
To define refined forks, let i ∈ I and let ti be the largestnonnegative integer such that
1. r(j(i) + ti) = 1, and2. r(j(i) + t) > 1 for all 0 ≤ t < ti.
The edge set F(i) is defined as
F(i) := {[fi, sj(i)], [fi+1, sj(i)+1], . . . , [fi+ti , sj(i)+ti ]},and is called a refined fork. As before, we define I(i) ={i, i + 1, . . . , i + ti}, J(ik) = {j(i), j(i) + 1, . . . , j(i) + ti}.Furthermore, we let F∗ be the following union of forks
F∗ = F(i1) ∪ F(i2) ∪ · · · ∪ F(ip),
where i1 = 1, ik = |F(i1)|+ · · ·+ |F(ik−1)|+ 1 (2 ≤ k ≤ p)
and m ∈ I(ip). Again, F∗ is a maximum matching in G,
302 NETWORKS—2009—DOI 10.1002/net

and we call F∗ the refined fork matching. Observe that anyfork consists of a number of consecutive refined forks, forwhich j(ik) + tik + 1 = j(ik+1). Intuitively, a refined forkmay be viewed as a deletion opportunity (or, using Collab-orative Decision-Making terminology, a bridging sequence;see Vossen and Ball [11]) because the deletion of flight fik willallow all other flights in the refined fork to be moved up a slot.
To illustrate the benefits of this refinement, we now showthe optimality of the refined fork matching by constructinga corresponding dual solution. The explicit construction of adual will provide a solution for arbitrary values of L.
We can define the dual under consideration is as follows:D(L):
zD(L) = max∑
i∈I
ui −∑
j∈J
vj − Lw
s.t.
ui ≤ T(sj) + vj ([i, j] ∈ E : i ∈ I)
ui ≤ T(fi) + w (i ∈ I)
ui, vj, w ≥ 0.
To determine an optimal solution for the dual problem D(0)
we first define for each refined fork k ∈ {1, . . . , p}
Tmax(k) = T(sj(ik)+tik), and Tmin(k) = T(fik ).
Then, an optimal dual solution is
ui = Tmax(k), i ∈ I(ik), k ∈ K ;
vj = Tmax(k) − T(sj), j ∈ J(ik), k ∈ K
= 0, otherwise;
w = maxk∈{1,...,p}(Tmax(k) − Tmin(k)).
It is easy to verify that the solution is dual feasible, and thatzP(0) = zD(0).
6.2.2. A Greedy Procedure for Flight Deletions We nowdescribe an algorithm for determining an allocation thatsolves P(L) for arbitrary values of L. The procedure startswith an allocation in which no flights are deleted. Subse-quently, the procedure repeatedly deletes a flight until Lflights have been deleted. At each iteration, the procedureselects the first flight of a refined fork whose correspondingbridging sequence yields the maximum reduction in delay.The resulting procedure can be outlined as follows.
Greedy-Flight-Parametric:
Step 0: Let G be a flight allocation graph. Let l = 0, andlet the set of deleted flights be C(l) = ∅. Let M(0) be therefined fork matching that solves P(0).
while l < L do:
Step 1: For each refined fork k ∈ {1, . . . , p(l)} in M(l),let Tmax(k) = T(sj(ik)+tik
) and let Tmin(k) = T(fik ).
Furthermore, let
w(l + 1) = maxk∈{1,...,p(l)}
(Tmax(k) − Tmin(k)),
k∗ = arg maxk∈{1,...,p(l)}
(Tmax(k) − Tmin(k)).
Step 2: Cancel the first flight in refined fork k∗, and let
C(l + 1) := C(l) ∪ {fik∗ },M(l + 1) := M(l) − F(ik∗)
∪ {[fik∗+1, sj(ik∗ )], [fik∗+2, sj(ik∗ )+1], . . . ,
[fik∗+tik∗ , sj(ik∗ )+tik∗ −1]},l := l + 1.
Observe that the Greedy-Flight-Parametric procedurerequires O(Lm) steps, because both step 1 and step 2 mayuse O(m) steps. The correctness of the procedure is shown inthe following theorem.
Theorem 18. The matching M(L) obtained by the greedyflight deletion procedure yields an optimal solution to P(L).
Proof. The proof follows by construction of an optimaldual solution to D(L). First, we let
w : = w(L),
ui : = T(fi) + w(L) for i ∈ C(L),
vj : = 0 for j �∈ S(M(L)).
To define a dual solution, we also need to define values forui (i ∈ I − C(L)) and vj (j ∈ S(M(L)), corresponding to theflights and slots in each refined fork. We start by determiningfor each refined fork k ∈ {1, . . . , p(l)} in M(L),
TS(k) = maxj∈J(ik)
T(sj), TC(k) = maxi∈C(L):j(i)≤j(ik)
ui,
Tmax(k) = max(TS(k), TC(k)),
and let
ui = Tmax(k), i ∈ I(ik), 1 ≤ k ≤ p(L)
vj = Tmax(k) − T(sj), j ∈ J(ik), 1 ≤ k ≤ p(L).
Observe that Tmax(k) ≤ Tmax(k′) if k < k′.To show that the resulting solution yields an optimal
primal-dual pair, we first note that the complementary slack-ness conditions hold, that is,
yi = 1 ⇒ ui = T(fi) + w,
xij = 1 ⇒ ui = T(sj) + vj ⇔ Tmax(k)
= T(sj) + Tmax(k) − T(sj),
where k is such that i ∈ I(ik) and j ∈ J(ik). Thus, whatremains is to show that the resulting solution is dual feasible.Let us first consider the dual constraints
ui ≤ T(fi) + w.
NETWORKS—2009—DOI 10.1002/net 303

Clearly, these constraints are satisfied for i ∈ C. Thus, leti ∈ I − C(L) with some k such that i ∈ I(ik). Now, we candistinguish two cases:
1. ui = TS(k). In this case, we have
TS(k) ≤ T(fi) + w,
which holds since otherwise the deletion of fi would haveyielded a greater delay reduction than the flight that wasdeleted in iteration L.
2. ui = TC(k). Let TC(k) = ui′ for some i′ ∈ C(L) suchthat j(i) ≤ j(ik). In this case, we have
TC(k) = ui′ = T(fi′) + w ≤ T(fi) + w,
which holds since T(fi′) ≤ T(fi).
Next, we consider the dual constraints
ui ≤ T(sj) + vj ([i, j] ∈ E).
To prove that these constraints are satisfied, we considerthe following four cases:
1. i ∈ C(L), j ∈ S(M(L)) such that j ≥ j(i). Let k be suchthat j ∈ J(ik). In this case the constraint reduces to
T(fi) + w ≤ Tmax(k),
which holds by definition.2. i ∈ C(L), j �∈ S(M(L)) such that j ≥ j(i). In this case,
the constraint reduces to
T(fi) + w ≤ T(sj).
Suppose now that fi was cancelled at iteration l(1 ≤ l ≤L) and let j(l) be the slot that was vacated. Clearly, theconstraint holds if j ≥ j(l). Now suppose that j < j(l).Let l′ be the iteration in which slot sj was vacated, andi(l′) be the corresponding flight that was canceled. SinceT(fi) ≤ T(fi(l′)), we have
T(sj) − T(fi) ≥ T(sj) − T(fi(l′) = w(l′) ≥ w(L) = w.
3. i ∈ I −C(L), j ∈ S(M(L)). Let k, k′ be such that i ∈ I(ik)and j ∈ J(ik′). Observe that k ≤ k′. Substituting ui andvj then yields
Tmax(k) ≤ Tmax(k′),
which holds since Tmax(k) is ascending in k.4. i ∈ I − C(L), j �∈ S(M(L)) with some some k such that
i ∈ I(ik). Now, we can again distinguish two cases:a. ui = TS(k). In this case we have
TS(k) ≤ T(sj),
which holds by definition.b. ui = TC(k). Let TC(k) = ui′ for some i′ ∈ C(L)
such that j(i) ≤ j(ik). This case follows fromcase 2. ■
It is relatively easy to see that the equity properties thatapply to allocations that cover all flights (see Section 5) also
carry over to the current situation. Similar to the approachtaken in Section 4.2, we can organize the delays of anymatching M of size m − L into the delay vector dM =(dM
1 , dM2 , . . . , dM
m−L). The same notion weak majorizationapplies, and Theorem 12 can be extended as follows.
Theorem 19. Let M(L) be the allocation produced by pro-cedure Greedy-Flight-Parametric, Then, M(L) has the M∗properties given in Theorem 9 and Proposition 4.
Observe that this result no longer applies if we consider themore general case in which the j(i) are not weakly increasing.In this situation, however, one can easily transform the alloca-tion M(L) by repeatedly applying the pairwise interchangesintroduced in Theorem 7 to the flights within a refined fork.
6.3. Flight Deletions under General D�(M)
We now consider more general models where delay costsare associated with each deleted flight. In the first model weconsider, there is an arbitrary cost � for each deleted flight.We show there is a correspondence with the parametric modeldiscussed in Section 6.2. Specifically, we establish a map-ping that associates with every value of � an L, such thatthe matching M(L) found by the procedure Greedy-Flight-Parametric minimizes the total delay costs. To establishthis result,we first state the optimization model for the costminimization problem.
P(�):
zP(�) = min∑
i∈I
(� + T(fi))yi +∑
ij∈E:i∈I
T(sj)xij
s.t. (1), (2), (4),
where, as before, xij = 1 iff flight fi is assigned to slot sj, andyi = 1 iff flight fi is cancelled. Our main result is stated inthe following theorem.
Theorem 20. For any value � ≥ 0, let L be a nonnegativeinteger such that
w(L + 1) ≤ � ≤ w(L),
where w(l) corresponds to the delay reduction determinedat each iteration of the greedy flight deletion procedure, andw(0) := ∞. Then, the matching M(L) obtained by the greedyflight deletion procedure yields an optimal solution to P(�).
The proof follows by construction of a dual solution andis analogous to the proof of Theorem 18. Implicit in Theorem20 is the property that for any nonnegative integer L, thereexists a � such that M(L) is a solution to P(�). Anotherrelated property is that w(L) is a nonincreasing function of L.These are all special properties that are not true in general.
To conclude, we consider a more general model in whicheach deleted flight fi may have a different cost �i. We showthat a variant of the procedure Greedy-Flight-Parametric
304 NETWORKS—2009—DOI 10.1002/net

yields a matching that minimizes the total delay costs. Toestablish this result, we first state the optimization model forthis cost minimization problem.
P(−→�):
zP(−→�) = min
∑
i∈I
(�i + T(fi))yi +∑
ij∈E:i∈I
T(sj)xij
s.t. (1), (2), (4).
An algorithm that yields an allocation which solves P(−→�) is
as follows. The procedure starts with an allocation in whichno flights are deleted. Subsequently, the procedure repeatedlydeletes the flight which yields the largest cost reduction untilno such flights can be found. The resulting procedure can beoutlined as follows.
Greedy-Flight-Delay:
Step 0: Let G be a flight allocation graph. Let the set ofdeleted flights be C = ∅, and let M be the refined forkmatching when no flights are deleted.
Step 1: For each refined fork k ∈ {1, . . . , p} in M, letTmax(k) = T(sj(ik)+tik
). Furthermore, let
w = maxk∈{1,...,p}
maxi∈I(ik)
(Tmax(k) − T(fi) − �i),
and let k∗, i∗ be such that w = Tmax(k∗) − T(fi∗) − �i∗ .Let j∗ be such that [fi∗ , sj∗ ] ∈ M.
Step 2: If w ≤ 0, stop. Otherwise go to Step 3.
Step 3: Cancel the flight fi∗ in refined fork k∗, and let
C := C ∪ {fi∗ },M := M − F(ik∗)
∪ {[fik∗ , sj(ik∗ )], . . . , [fi∗−1, sj∗−1]}∪ [fi∗+1, sj∗ ], . . . , [fik∗+tik∗ , sj(ik∗ )+tik∗ −1]},
and repeat Step 1.
We note that the Greedy-Flight-Parametric procedurerequires O(m2) steps, because the number of flights deleted
is O(m). The correctness of the procedure is shown in thefollowing theorem.
Theorem 21. The matching M obtained when the greedyflight deletion procedure terminates yields an optimal solu-tion to P(
−→�).
Proof. The proof again follows by construction of anoptimal dual solution to D(L), and is analogous to the proofof Theorem 18 after we define
ui := T(fi) + �i for i ∈ C,
vj := 0 for j �∈ S(M). ■
6.4. Empirical Results
Of course, each of the parametric problems P(L), P(�),and P(
−→�) can be solved as an assignment or transportation
problem. The greedy iterative approach taken by Theorem 18,however, provides visibility into the structure of the solutionand would readily allow a modeler or decision maker to adjustthe solution or carry out a parametric analysis.
To illustrate this, we consider two case studies that arebased on actual GDPs at Chicago O’Hare Airport (ORD)and Boston’s Logan Airport (BOS). In the case of ChicagoO’Hare Airport, we used data from a GDP that was imple-mented on January 26, 2001. This data set included 619flights, whereas the number of slots in the initial 5-h pro-gram period was 376. It is important to note, however, thatthe RBS algorithm creates extra slots past the program periodto ensure that all flights are accommodated. As a result, theresulting flight allocation graph has 1,238 nodes (619 each forflights and slots), while the earliest arrival times in our dataset resulted in 262,636 edges. For Boston’s Logan Airport,we used data from a GDP that was implemented on January9, 2001, with 281 flights and 208 slots in the initial programperiod. In this case, the resulting flight allocation graph has562 nodes and 71,645 edges.
For both of these cases, we consider the solutions foundby the procedure Greedy-Flight-Parametric over a range ofthe number of flights cancelations L. The results are shown inFigures 6 and 7. The graphs on the left in each figure illustratehow total delay decreases as a function of L. The graphs on the
FIG. 6. O’Hare Airport, Chicago; (a) total delay (b) marginal delay.
NETWORKS—2009—DOI 10.1002/net 305

FIG. 7. Logan Airport, Boston; (a) total delay (b) marginal delay.
left show the marginal delay reduction for each value of L, andcorrespond to w(L) as defined in the proof of Theorem 18. TheRBS algorithm corresponds to the greedy procedure whenL equals 0; since RBS does not allow flight cancelations,a direct comparison is more difficult when L > 0. If can-celations are a possibility (i.e., in airspace flow programs),however, the graphs shown above would allow the serviceprovider to evaluate the impact of different levels of flightcancellations. In addition, we note that the marginal delaygraphs allow us to determine the optimal solutions to P(�).Consider, for example, the marginal delay graph in the caseof Chicago O’Hare Airport. Since the marginal delay reduc-tion equals 551 min when L = 1 (that is, w(L) = 551),Theorem 20 states that no flights will be cancelled when� > 551. Thus, the marginal delay graphs allow us to inves-tigate the “implicit” delay cost associated with cancelingflights.
7. CONCLUSIONS
In this article we have investigated a class of modelsrelated to assigning flights to slots so as to achieve delay-related objectives. We have given simple, greedy algorithmsfor many of these models. These models produce solutionsthat not only minimize total delay objectives but that also sat-isfy strong properties related to the theory of majorization.These properties indicate that the solutions are highly desir-able with respect to the equity of the distribution of delayamong the flights. For this application equity is a secondobjective of importance that can be difficult to quantify usingsimple linear objective functions.
We investigate problems involving flight deletions andshow useful structural properties for the solutions. In addi-tion using simple, greedy algorithms we are able to produceparametric solutions to problems for varying values of thenumber of flights deleted or the deletion cost.
Acknowledgments
Any opinions expressed herein do not necessarily reflectthose of the FAA or the U.S. Department of Transportation.
REFERENCES
[1] A.S. Asratian, T.M.J. Denley, and R. Haggkvist, Bipartitegraphs and their applications, Cambridge University Press,Cambridge, 1998.
[2] M. Ball, R. Dahl, L. Stone, and T. Thompson, OPTIFLOWbuild-I design document, Version 1.5, Optiflow ProjectReport to the FAA, 1993.
[3] M. Ball, C. Barnhart, G. Nemhauser, and A. Odoni, “Manag-ing air traffic and airline operations for schedule reliability,”Handbook of operations research and management sci-ence: Transportation, C. Barnhart and G. Laporte (Editors),Elsevier North-Holland, Inc., New York, 2006, pp. 1–67.
[4] R.A. Brualdi, “Transversal theory and graphs”, Studies ingraph theory, Part I, D.R. Fulkerson (Editors), The Mathe-matical Association of America, USA, 1975, pp. 23–88.
[5] J. Edmonds, Matroids and the greedy algorithm, MathProgram 1 (1971), 127–136.
[6] J. Edmonds and D.R. Fulkerson, Transversals and matroidpartition, J Res Nat Bureau of Standards B69 (1965),147–153.
[7] F. Glover, Maximum matchings in a convex bipartite graph,Naval Res Logist 14 (1967), 313–316.
[8] G.H. Hardy, J.E. Littlewood, and G. Polya, Inequalities, 2ndedition, Cambridge University Press, Cambridge Mathemat-ical Library, 1988.
[9] A.W. Marshall and I. Olkin, Inequalities: Theory of majoriza-tion and its applications, Academic Press, New York, 1979.
[10] G. Steiner and J.S. Yeomans, A linear time algorithm for max-imum matchings in convex, bipartite graphs, Comput MathAppl 31 (1996), 91–96.
[11] T. Vossen and M. Ball, Optimization and mediated barter-ing models for ground delay programs, Naval Res Logist 53(2006), 75–90.
[12] T. Vossen and M. Ball, Slot trading opportunities in col-laborative ground delay programs, Transport Sci 40 (2006),29–43.
[13] M. Wambsganss, Collaborative decision making throughdynamic information transfer, Air Traffic Control Quarterly4 (1996), 107–123.
[14] D.J.A. Welsh, Matroid theory, Academic Press/HarcourtBrace Jovanovich, London/New York, 1976.
[15] H.P. Young, Equity in theory and practice, Princeton Univer-sity Press, Princeton, NJ, 1994.
306 NETWORKS—2009—DOI 10.1002/net





![Analysis of Stable Matchings in R: Package matchingMarkets · Analysis of Stable Matchings in R: ... 4 Analysis of Stable Matchings in R: Package matchingMarkets ... G = 1[V G 0]](https://img.pdfslide.net/doc/110x75/5b3cc11f7f8b9a9a098b5ae0/analysis-of-stable-matchings-in-r-package-matchingmarkets-analysis-of-stable.jpg)