Embed Size (px)
Citation preview
Mathematical Modeling in Population Dynamics
Glenn Ledder
University of Nebraska-Lincoln
http://www.math.unl.edu/~gledder1
Supported by NSF grant DUE 0536508
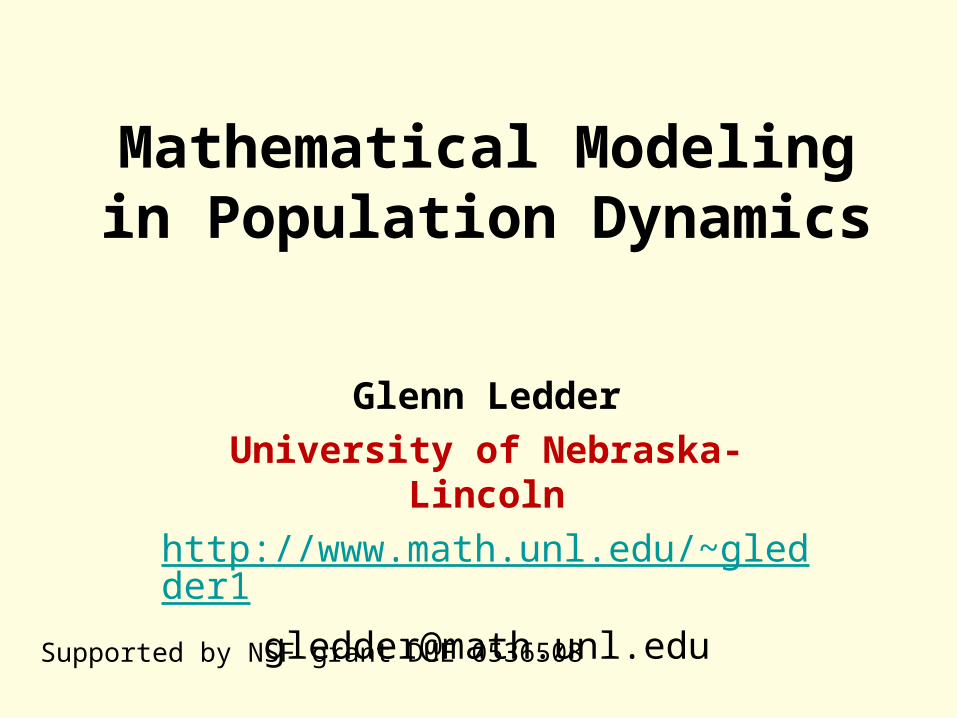
Mathematical Model
Math
ProblemInput Data Output Data
Key Question:
What is the relationship between input
and output data?
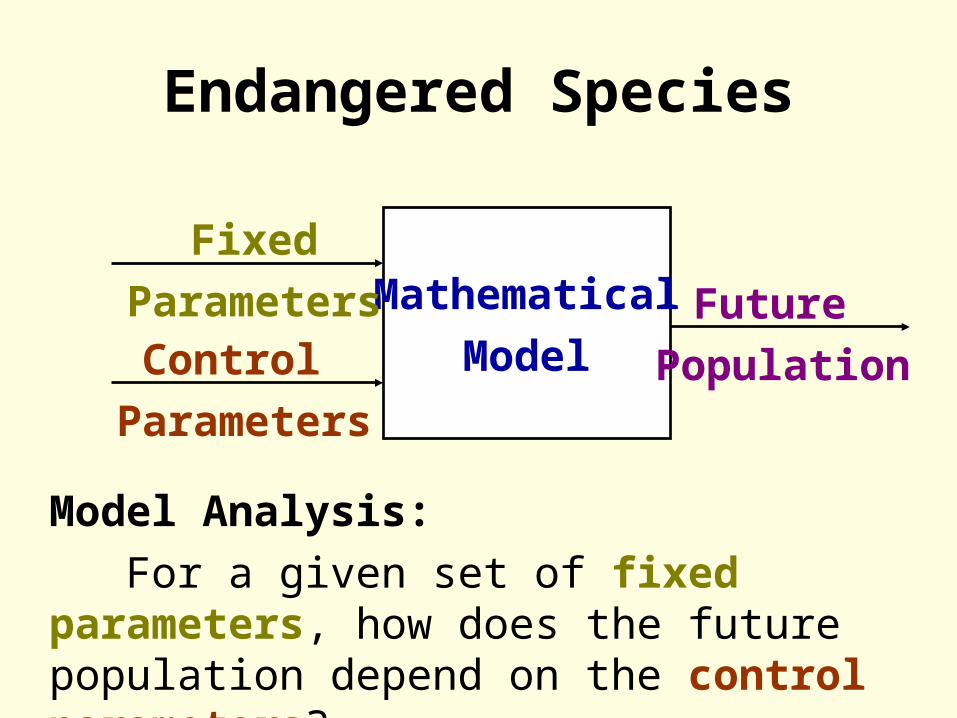
Endangered Species
Mathematical
ModelControl
Parameters
Future
Population
Fixed
Parameters
Model Analysis:
For a given set of fixed parameters, how does the future population depend on the control parameters?
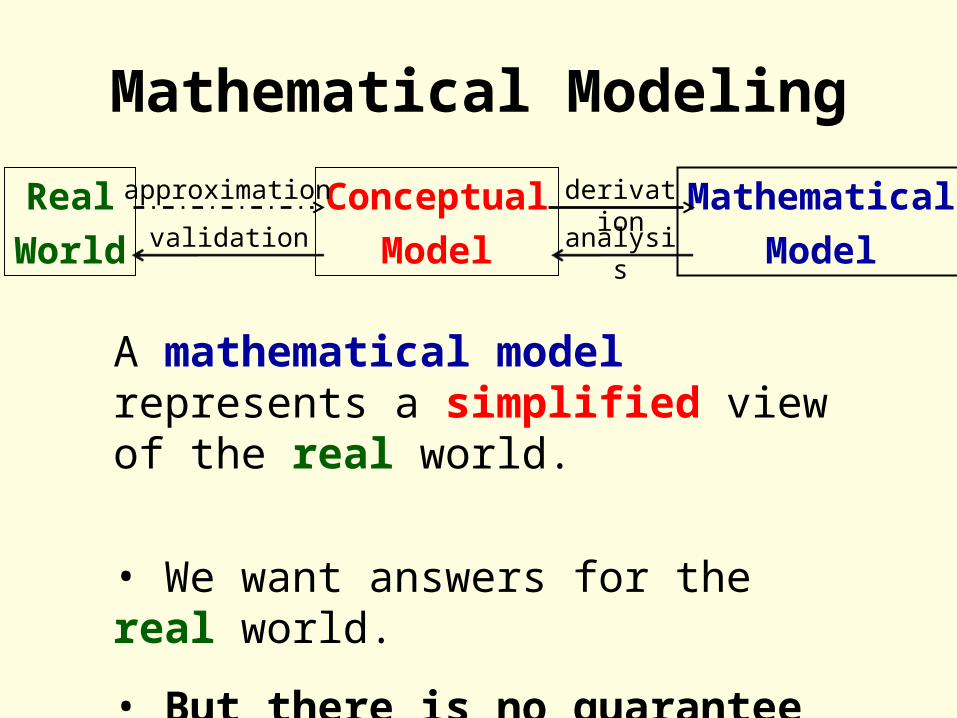
Mathematical Modeling
Real
World
Conceptual
Model
Mathematical
Model
approximation derivation
analysisvalidation
A mathematical model represents a simplified view of the real world.
• We want answers for the real world.
• But there is no guarantee that a model will give the right answers!
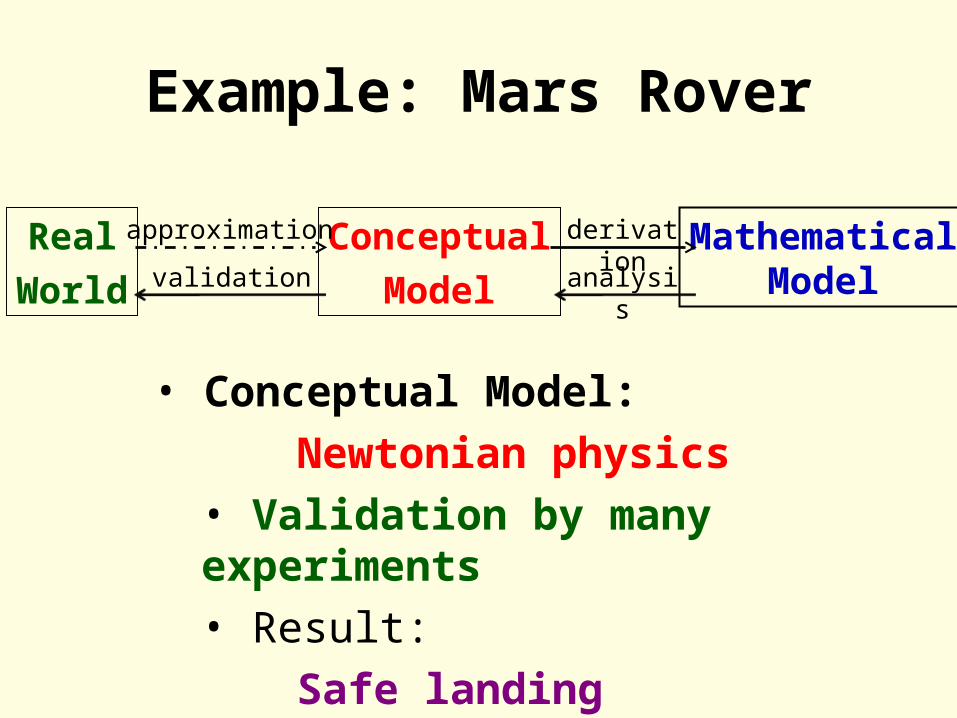
Example: Mars Rover
Real
World
Conceptual
Model
MathematicalModel
approximation derivation
analysisvalidation
• Conceptual Model:
Newtonian physics
• Validation by many experiments
• Result:
Safe landing
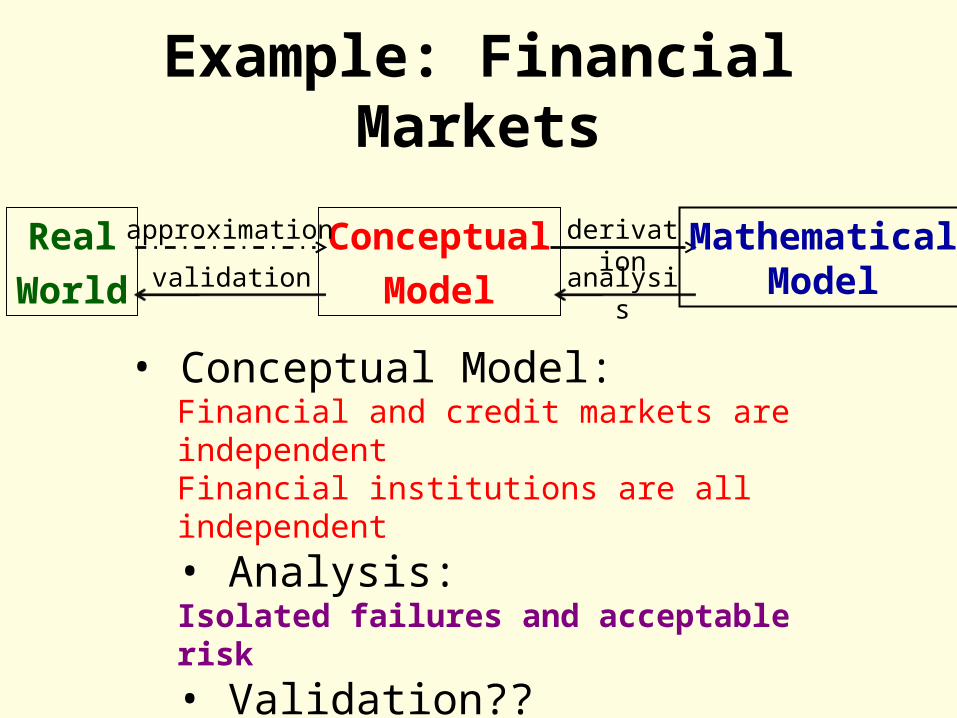
Example: Financial Markets
Real
World
Conceptual
Model
approximation derivation
analysisvalidation
• Conceptual Model:Financial and credit markets are independentFinancial institutions are all independent
• Analysis:Isolated failures and acceptable risk
• Validation??
• Result: Oops!!
MathematicalModel
Forecasting the Election
Polls use conceptual models• What fraction of people in each age group vote?• Are cell phone users “different” from landline users?
and so on
http://www.fivethirtyeight.com• Uses data from most polls• Corrects for prior pollster results• Corrects for errors in pollster conceptual models
Validation?
Most states within 2%!
General Predator-Prey ModelLet x be the biomass of prey.
Let y be the biomass of predators.
Let F(x) be the prey growth rate.
Let G(x) be the predation per predator.
Note that F and G depend only on x.
yxGxFdt
dx)()( myyxGc
dt
dy )(
c, m : conversion efficiency and starvation rate
Simplest Predator-Prey Model
Let x be the biomass of prey.
Let y be the biomass of predators.
Let F(x) be the prey growth rate.
Let G(x) be the predation rate per predator.
F(x) = rx :
Growth is proportional to population size.
G(x) = sx :
Predation is proportional to population size.
Lotka-Volterra model
x = prey, y = predator
x′ = r x – s x y
y′ = c s x y – m y
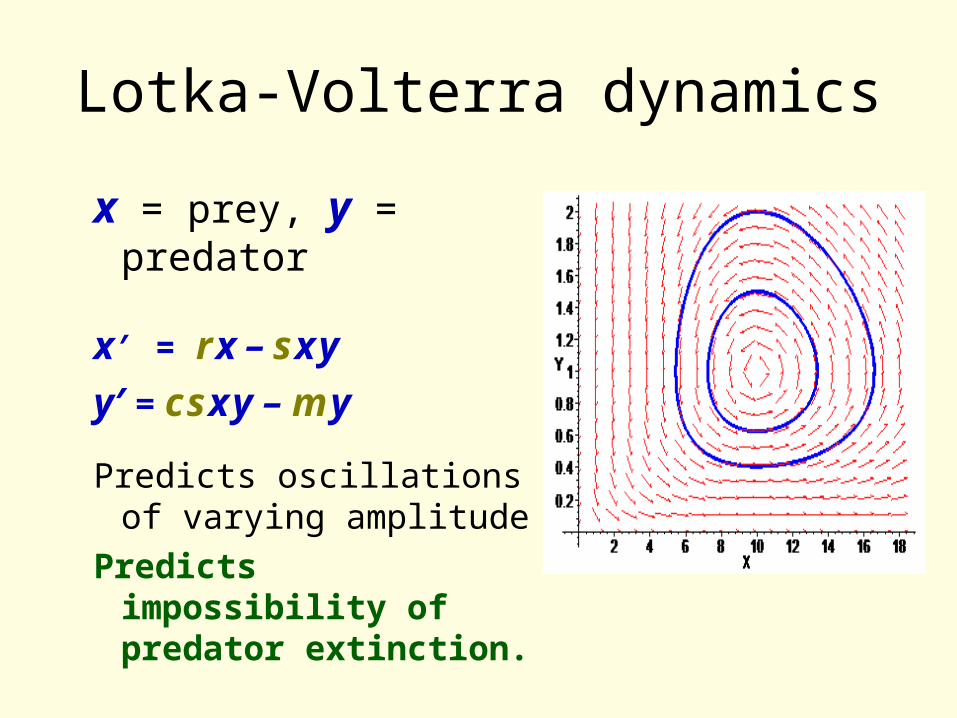
Lotka-Volterra dynamics
x = prey, y = predator
x′ = r x – s x y
y′ = c s x y – m y
Predicts oscillations of varying amplitude
Predicts impossibility of predator extinction.
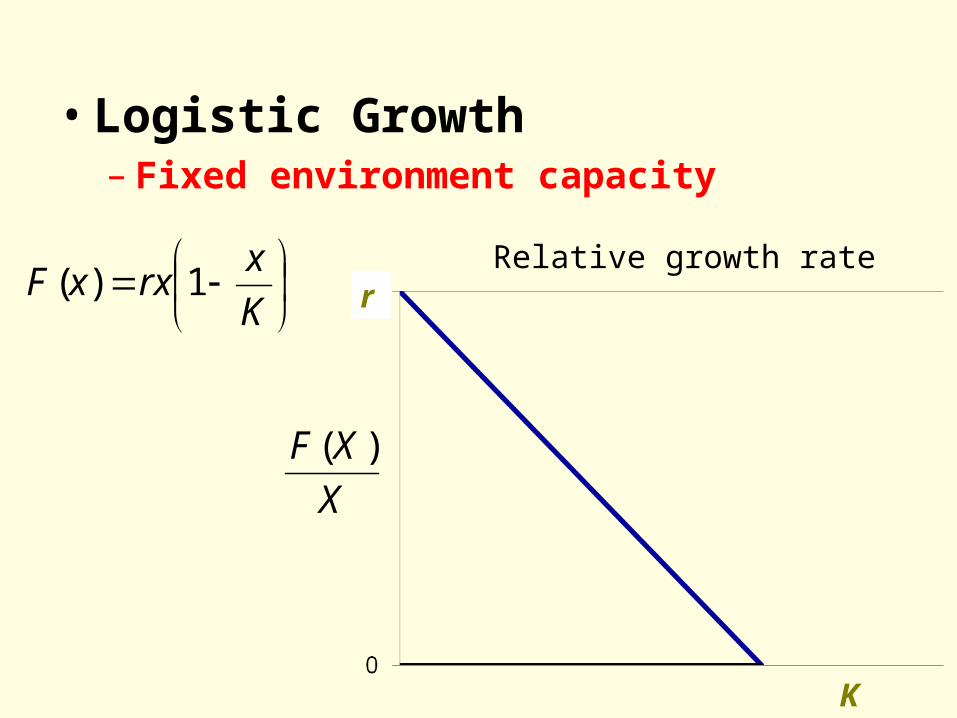
• Logistic Growth– Fixed environment capacity
K
xrxxF 1)(
K
r
X
XF )(
Relative growth rate
Logistic model
x = prey, y = predator
x′ = r x (1 – — ) – s x y
y′ = c s x y – m y
xK
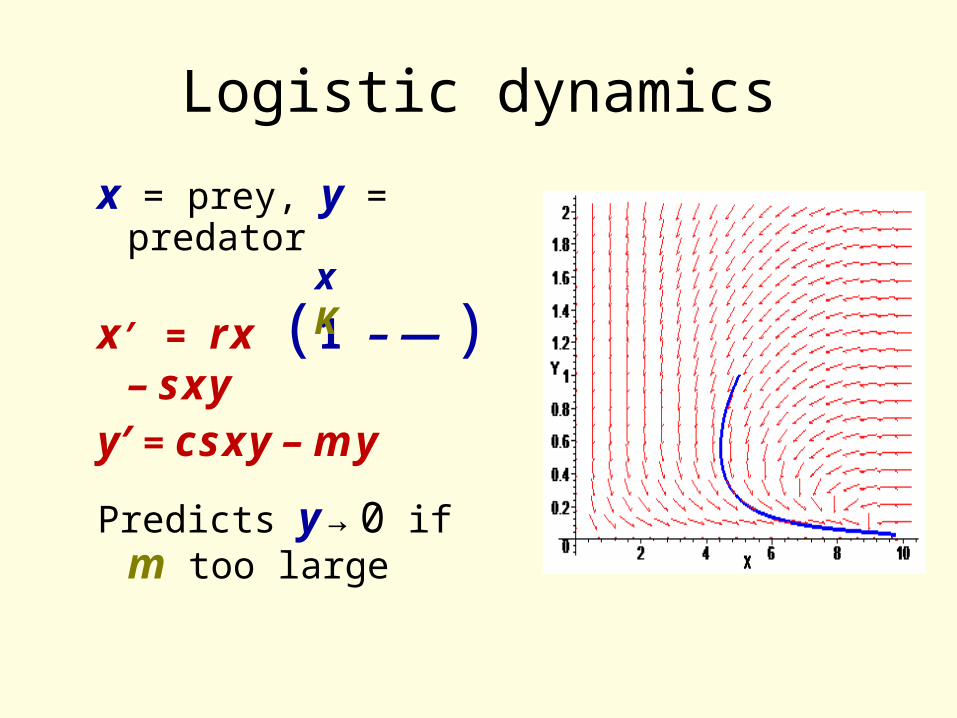
Logistic dynamics
x = prey, y = predator
x′ = r x (1 – — ) – s x y
y′ = c s x y – m y
Predicts y → 0 if m too large
xK
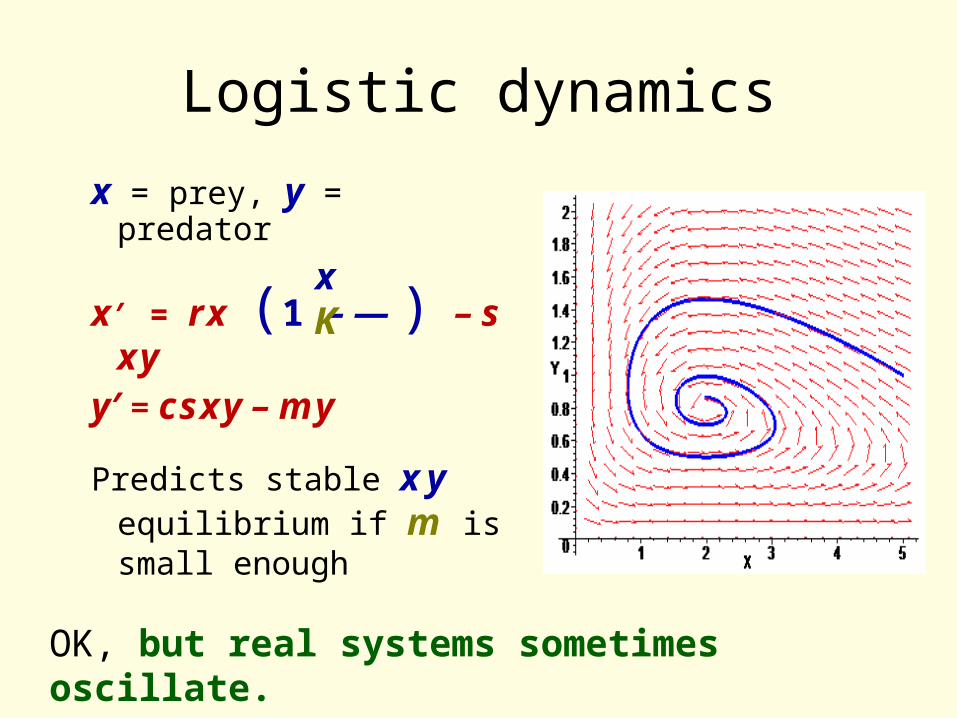
Logistic dynamics
x = prey, y = predator
x′ = r x (1 – — ) – s x y
y′ = c s x y – m y
Predicts stable x y equilibrium if m is small enough
xK
OK, but real systems sometimes oscillate.
Predation with Saturation
• Good modeling requires scientific insight. • Scientific insight requires observation.• Predation experiments are difficult to do in the real world.
• Bugbox-predator allows us to do the experiments in a virtual world.
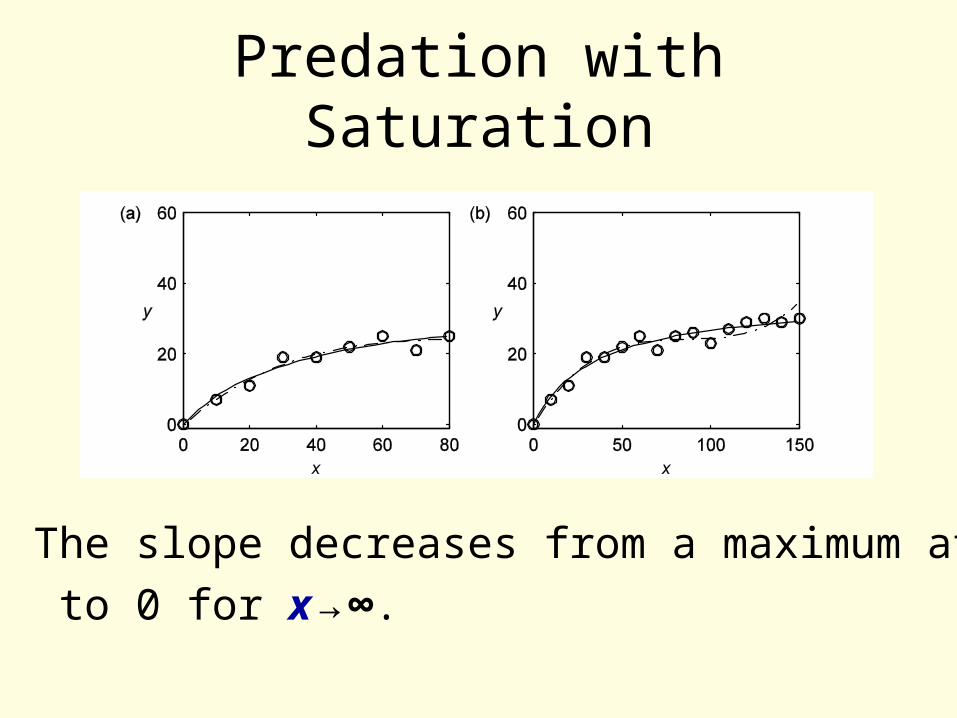
Predation with Saturation
The slope decreases from a maximum at x = 0
to 0 for x → ∞.
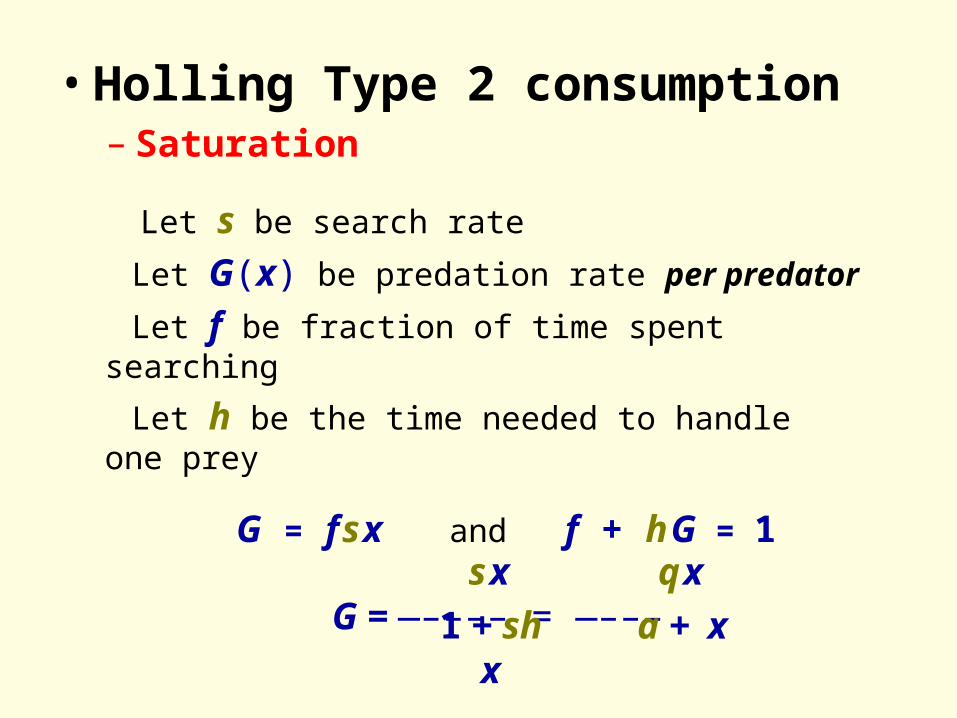
Let s be search rate
Let G(x) be predation rate per predator
Let f be fraction of time spent searching
Let h be the time needed to handle one prey
G = f s x and f + h G = 1
G = —–––– = —–––s x
1 + sh x
q x
a + x
• Holling Type 2 consumption– Saturation
Holling Type 2 model
x = prey, y = predator
x′ = r x (1 – — ) – —–––
y′ = —––– – m y
xK
qx ya + x
c q x ya + x
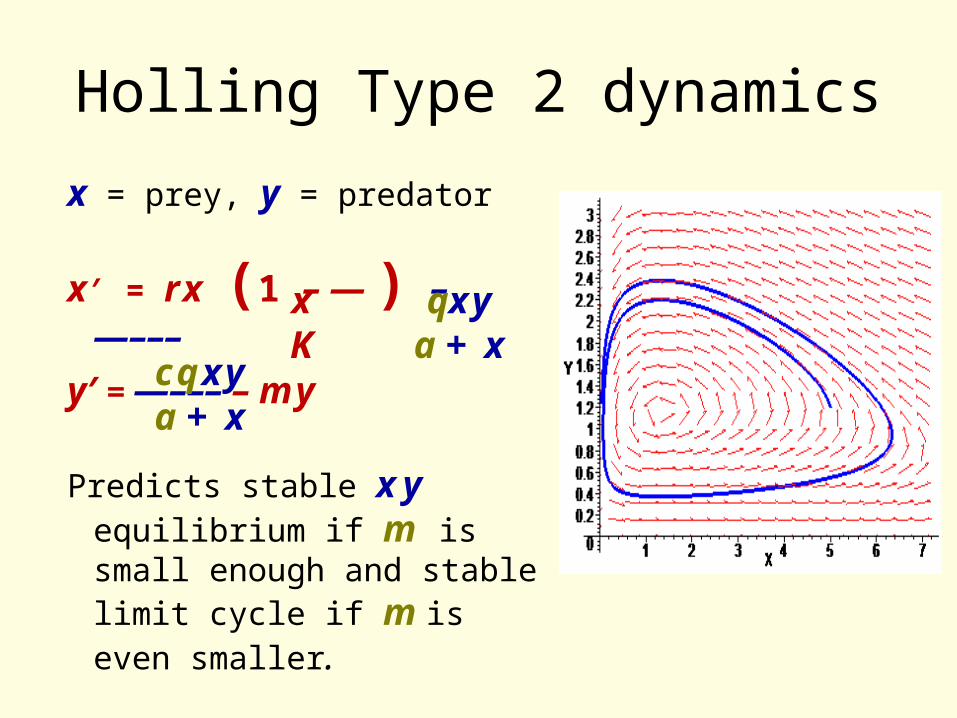
Holling Type 2 dynamics
x = prey, y = predator
x′ = r x (1 – — ) – —–––
y′ = —––– – m y
Predicts stable x y equilibrium if m is small enough and stable limit cycle if m is even smaller.
xK
qx ya + x
c q x ya + x
Simplest Epidemic Model
Let S be the population of susceptibles.
Let I be the population of infectives.
Let μ be the disease mortality.
Let β be the infectivity.
No long-term population changes.
S′ = − βSI:
Infection is proportional to encounter rate.
I′ = βSI − μI :
Salton Sea problem• Prey are fish; predators are birds.• An SI disease infects some of the fish.• Infected fish are much easier to catch than
healthy fish.• Eating infected fish causes botulism
poisoning.
C__ and B__, Ecol Mod, 136(2001), 103:
1.Birds eat only infected fish.
2.Botulism death is proportional to bird population.
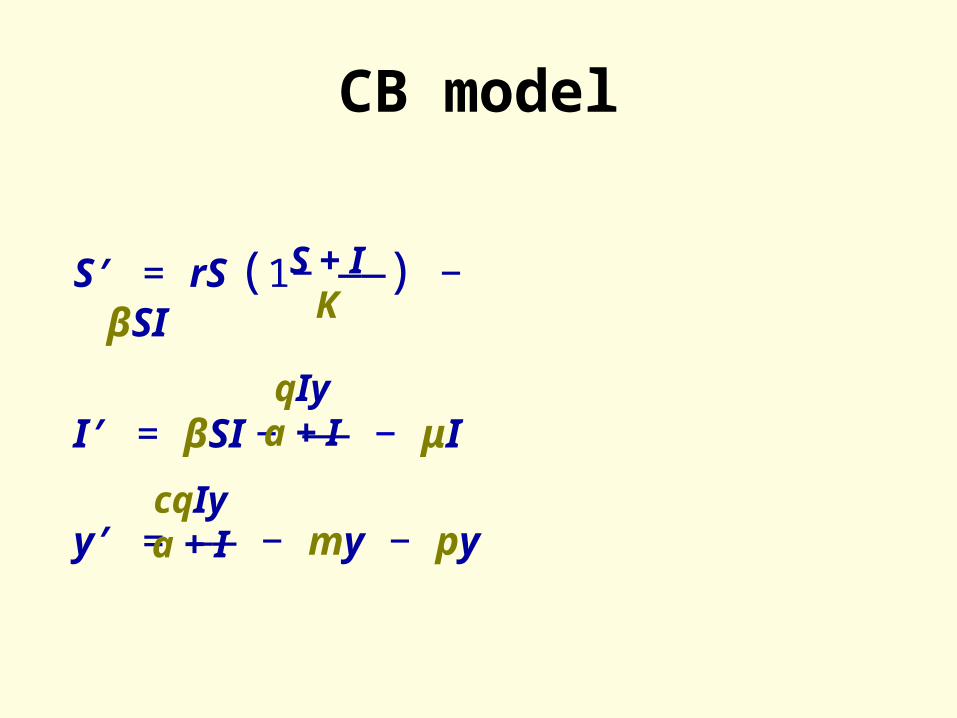
CB model
S′ = rS (1− ——) − βSI
I′ = βSI − —— − μI
y′ = —— − my − py
S + IK
qIya + I
cqIya + I
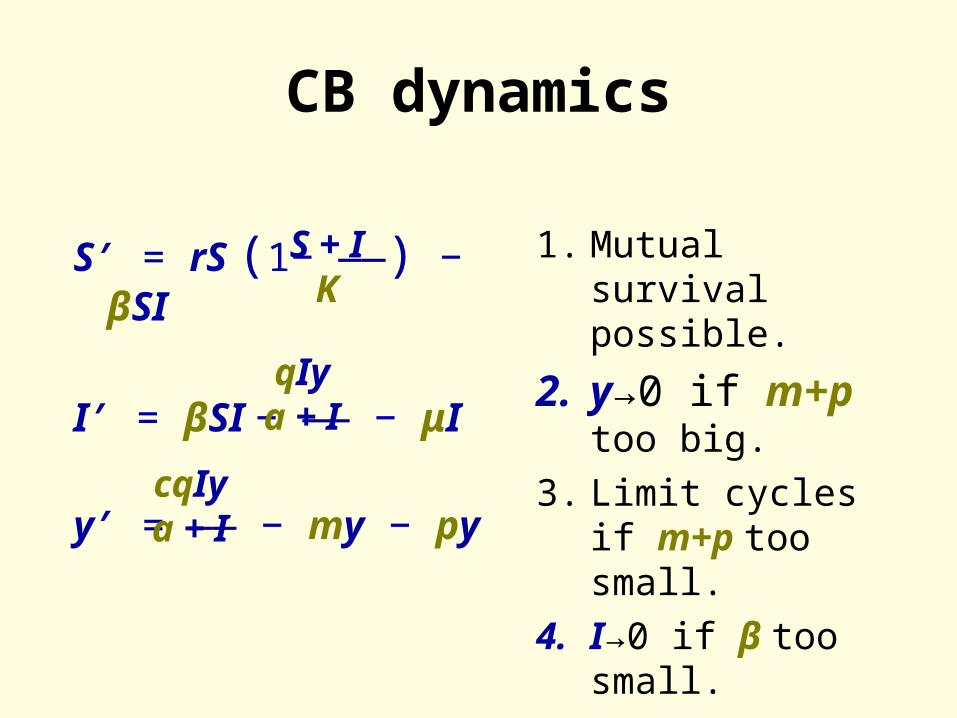
CB dynamics
1. Mutual survival possible.
2. y→0 if m+p too big.
3. Limit cycles if m+p too small.
4. I→0 if β too small.
S′ = rS (1− ——) − βSI
I′ = βSI − —— − μI
y′ = —— − my − py
S + IK
qIya + I
cqIya + I
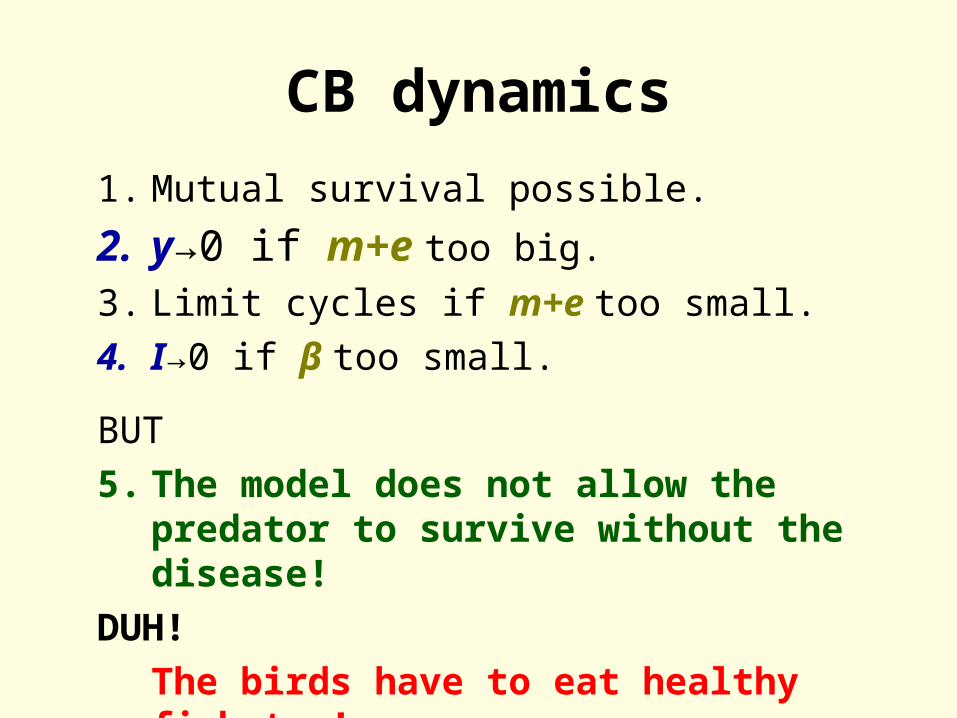
CB dynamics
1. Mutual survival possible.
2. y→0 if m+e too big.
3. Limit cycles if m+e too small.
4. I→0 if β too small.
BUT
5. The model does not allow the predator to survive without the disease!
DUH!
The birds have to eat healthy fish too!
REU 2002 corrections
• Flake, Hoang, Perrigo,
Rose-Hulman Undergraduate Math Journal
Vol 4, Issue 1, 2003
1. The predator should be able to eat healthy fish if there aren’t enough sick fish.
2. Predator death should be proportional to consumption of sick fish.
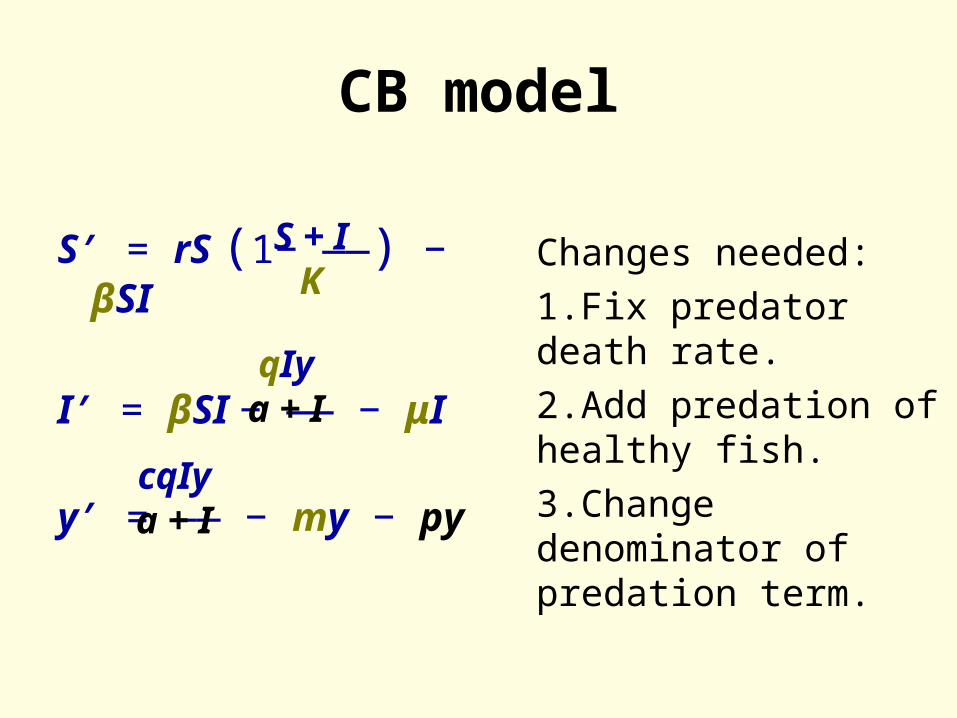
CB model
S′ = rS (1− ——) − βSI
I′ = βSI − —— − μI
y′ = —— − my − py
S + IK
qIya + I
cqIya + I
Changes needed:
1.Fix predator death rate.
2.Add predation of healthy fish.
3.Change denominator of predation term.
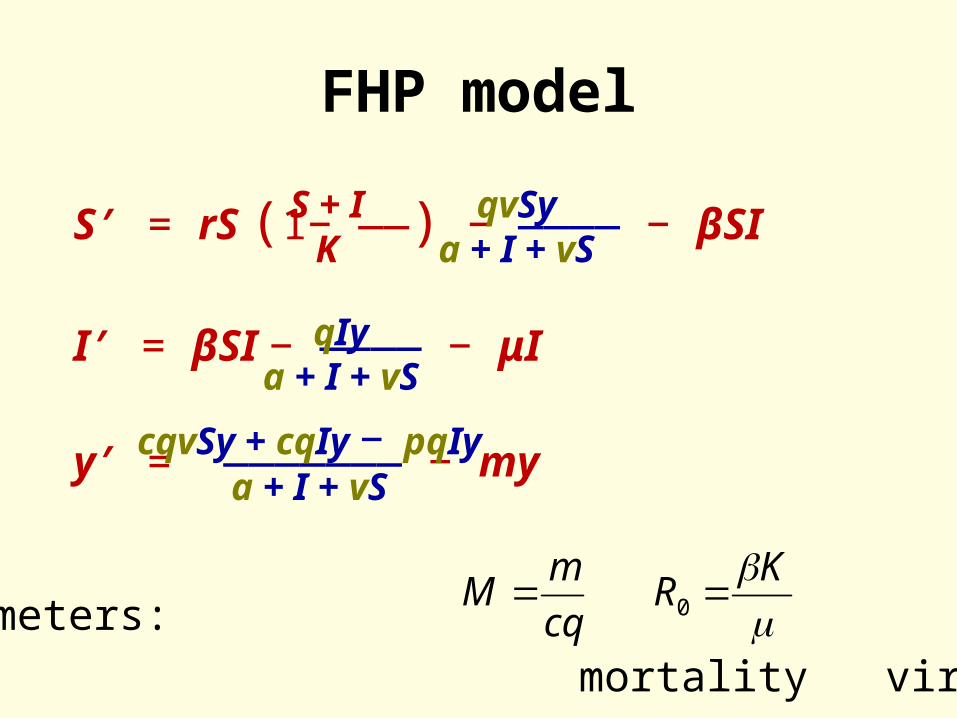
FHP model
S′ = rS (1− ——) − ———— − βSI
I′ = βSI − ———— − μI
y′ = ——————— − my
S + IK
cqvSy + cqIy − pqIya + I + vS
qIya + I + vS
qvSya + I + vS
Key Parameters:
mortality virulencecq
mM
K
R 0
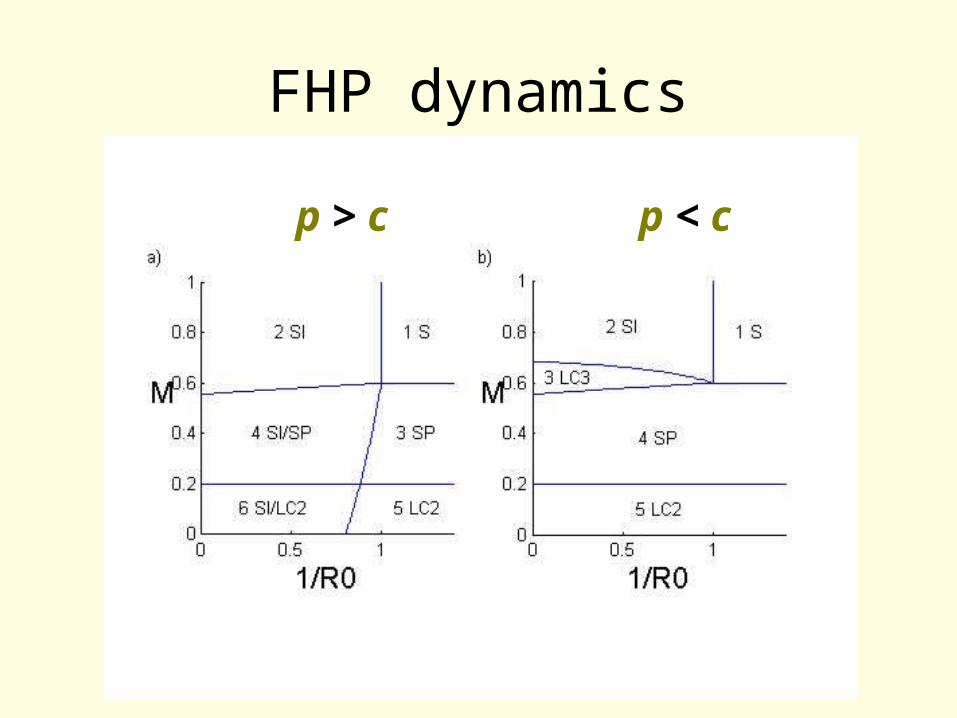
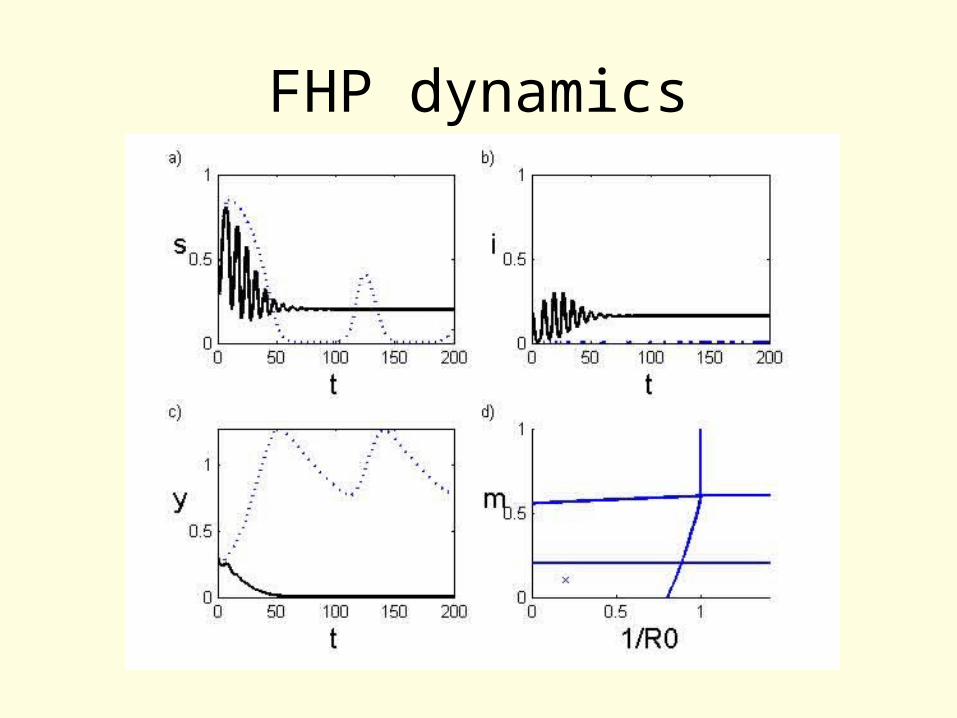
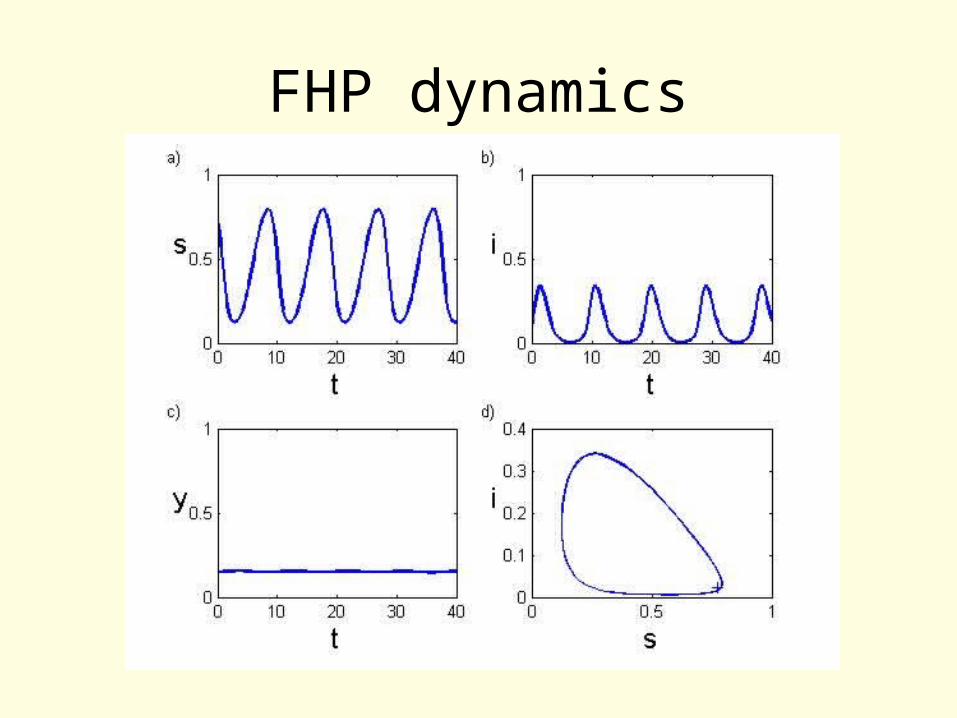
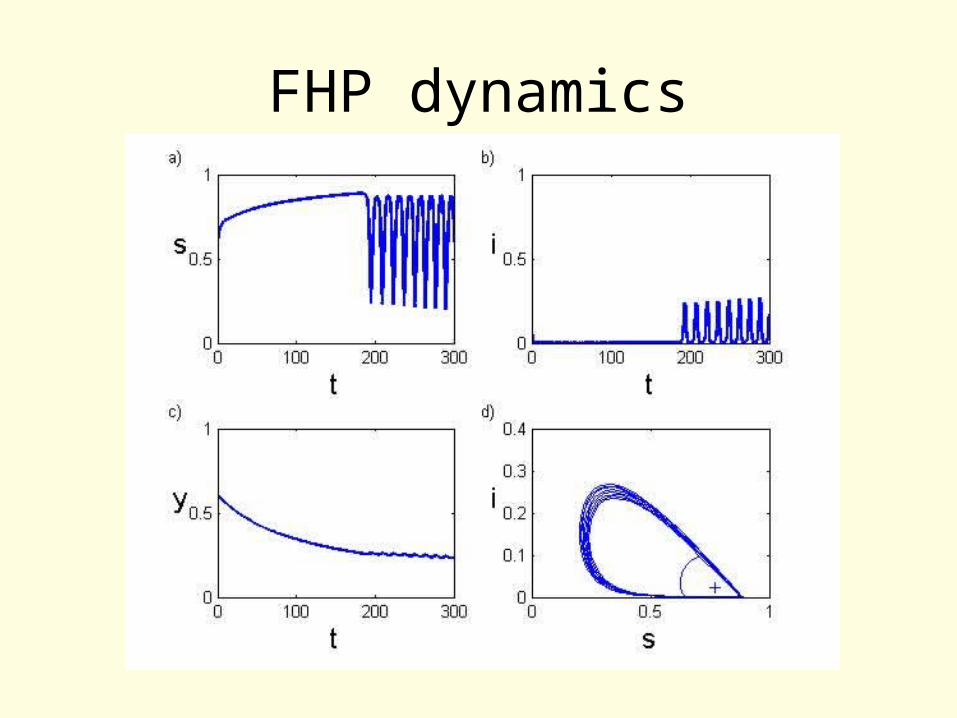
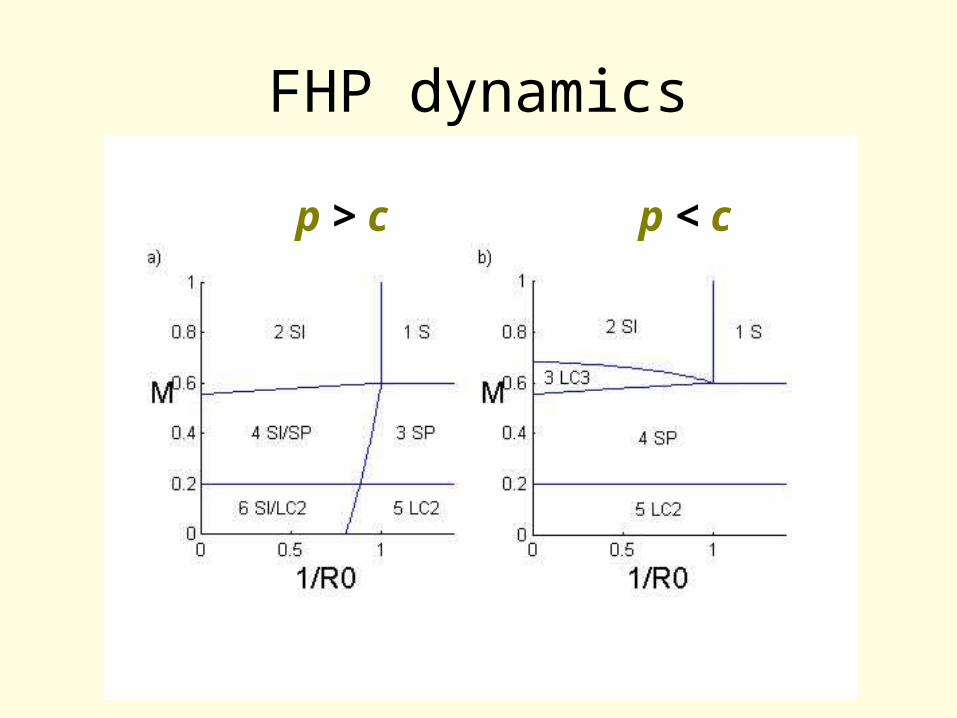
FHP dynamics
p > c p < cp > c p < c
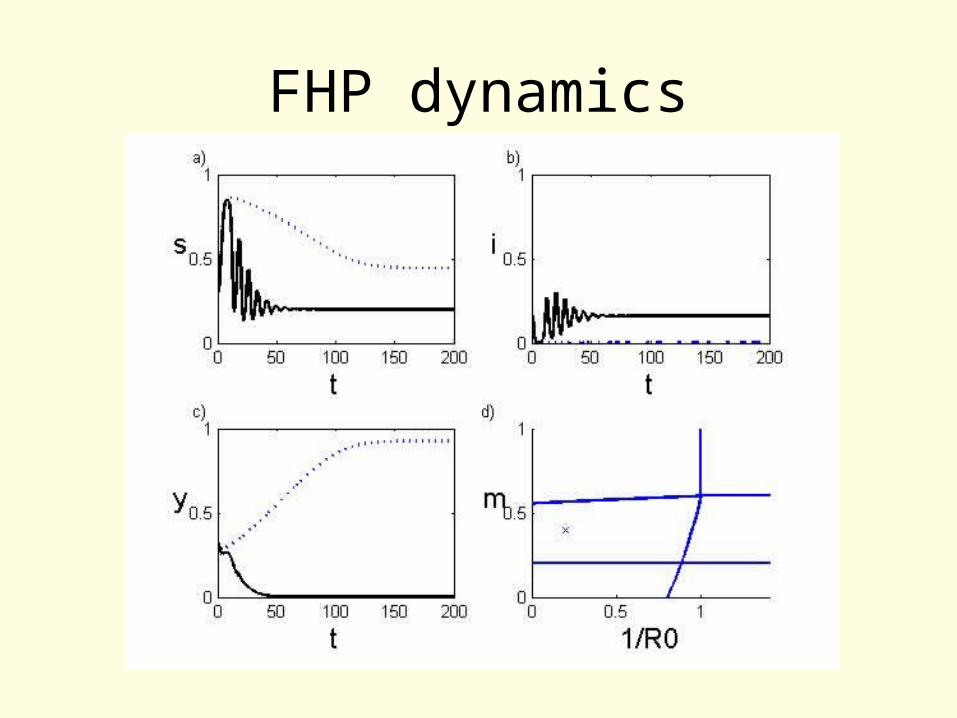
FHP dynamics
FHP dynamics
FHP dynamics
FHP dynamics
FHP dynamics
p > c p < cp > c p < c