Embed Size (px)
Citation preview

Mathematics of Coordinate Transformation
©2020 Max Donath

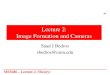
Origin of frame 2 is translated and the axes rotated relative to frame 1.

Mathematical Representations:Robot arm links rotate and/or translate with respect to a reference coordinate system. By considering a body-attached coordinate frame at the joint for each link, one can develop a description representing the location of robot arm links W.R.T. a fixed reference frame. That description is based on finding a transformation matrix that relates the two.
Wish to know where pt. P, defined W.R.T. object, is located W.R.T. reference coordinate frame.
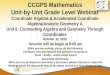
Rotation in XY plane about Z axis.

Consider two dimensional example:
Rotation about z by q
To define P in terms of base coordinate
frame YOX, given P defined in moving coordinate frame VOU

θ = 90°


Post-Multiplication:
◆ Coordinate frame shifted (i.e. translated and/or rotated) with respect to previous frame

Since matrix multiplication is
Non-commutative
A B ≠ B A
Must specify sequence carefully
The orientation of an object is very much a function of the sequence in which rotations about the various axes are taken

3 Rotations in sequence:
About X
About Y
About Z
XX’
X’ X
Y’
YY
Y’X
Y’
Z’’
ZZ’ZZ’
Z’Z’’
Z’
Z’’
Y’
Y’’Y’
Y’’
X’X’
X’’
X’’

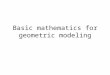
Orientation Definitions
OP in front of ZOX plane
Method A:
f: Rotation about Y
q: Rotation about X’y: Rotation about Z”
OP behind ZOX plane
Method B:
a: Rotation about Z
b: Rotation about Y’y: Rotation about Z”
To get OP to lie in frontof the ZOX plane,a would have to benegative

Euler angles: Three angles introduced by Leonhard Euler (1707-1783) to describe the orientation of a rigid body with respect to a fixed coordinate system. Three successive rotations about axes thatmove with the rotation, i.e. rotations about the current frame.
Z-Y-Z Euler angles: From Section 2.3.2, M. W. Spong and M. Vidyasagar, ”Robot Dynamics and Control”, Wiley, 1989

Position and Orientation of End Effector

Roll, pitch, yaw angles: Product of successive rotations about the principal coordinate axes taken in a specific order. Many variations.
Roll, pitch, yaw angles: From Section 2.3.3, M. W. Spong and M. Vidyasagar, ”Robot Dynamics and Control”, Wiley, 1989

UR5HomePosition
FrompageII-37oftheUR5/CB3UserManual(Version3.5.5)http://www.me.umn.edu/courses/me5286/robotlab/Resources/UR5_User_Manual_en_US-3.5.5.pdf

CoordinateFrameatToolCenterFrompageII-45oftheUR5/CB3UserManual(Version3.5.5)
UR5HomePosition
http://www.me.umn.edu/courses/me5286/robotlab/Resources/UR5_User_Manual_en_US-3.5.5.pdf