Embed Size (px)
Citation preview

Maximizing Capacity in Multihop CognitiveRadio Networks under the SINR Model
Yi Shi, Member, IEEE, Y. Thomas Hou, Senior Member, IEEE,
Sastry Kompella, Member, IEEE, and Hanif D. Sherali
Abstract—Cognitive radio networks (CRNs) have the potential to utilize spectrum efficiently and are positioned to be the core
technology for the next-generation multihop wireless networks. An important problem for such networks is its capacity. We study this
problem for CRNs in the SINR (signal-to-interference-and-noise-ratio) model, which is considered to be a better characterization of
interference (but also more difficult to analyze) than disk graph model. The main difficulties of this problem are two-fold. First, SINR is a
nonconvex function of transmission powers; an optimization problem in the SINR model is usually a nonconvex program and NP-hard
in general. Second, in the SINR model, scheduling feasibility and the maximum allowed flow rate on each link are determined by SINR
at the physical layer. To maximize capacity, it is essential to follow a cross-layer approach, but joint optimization at physical (power
control), link (scheduling), and network (flow routing) layers with the SINR function is inherently difficult. In this paper, we give a
mathematical characterization of the joint relationship among these layers. We devise a solution procedure that provides a ð1� "Þoptimal solution to this complex problem, where " is the required accuracy. Our theoretical result offers a performance benchmark for
any other algorithms developed for practical implementation. Using numerical results, we demonstrate the efficacy of the solution
procedure and offer quantitative understanding on the interaction of power control, scheduling, and flow routing in a CRN.
Index Terms—Theory, multihop cognitive radio network, nonlinear optimization, SINR model, cross-layer, capacity.
Ç
1 INTRODUCTION
COGNITIVE radio networks (CRNs) have great potential toimprove spectrum efficiency and will be the core
technology for the next-generation multihop wireless net-works. Within such a network, each node is equipped witha cognitive radio (CR) for wireless communications, whichis capable of sensing the available frequency bands (i.e.,those bands that are currently not used by primary users)and reconfiguring RF to switch to newly-selected fre-quency bands.
From wireless networking perspective, CR offers a wholenew set of research problems in algorithm design andprotocol implementation. To appreciate such opportunity,we compare CR with a closely related wireless technologycalled multichannel multiradio (MC-MR) [2], [20], [21]. First,MC-MR employs traditional hardware-based radio technol-ogy, and thus, each radio can only operate on a singlechannel at a time. In contrast, the radio technology in CR issoftware-based; a soft radio is capable of switching frequencybands on a per-packet basis. As a result, the number of
concurrent frequency bands utilized by a CR is typicallymuch larger than by MC-MR. Second, a common assump-tion for MC-MR is that there is a set of “common channels”available at every node in the network. Such assumption ishardly true for CRNs, where each node may have adifferent set of available frequency bands. These importantdifferences between MC-MR and CR suggest that algorithmdesign for CRNs is substantially more complex than that forMC-MR networks. In some sense, an MC-MR network canbe considered as a special case of a CRN.
The capacity of a CRN is usually considered a key problemin fundamental understanding. In this paper, we aim tostudy this problem in the SINR (signal-to-interference-and-noise-ratio) model. In this model, concurrent transmissionsare allowed and interference (due to transmissions bynonintended transmitter) is treated as noise. A transmissionis successful if and only if SINR at the receiver is greater thanor equal to a threshold. Moreover, the achieved transmissioncapacity is also a function of SINR (via Shannon’s formula).The current understanding is that the SINR model is betterthan the so-called “disk graph model” (or “protocol model”[15]) for interference characterization.
Although the SINR model is thought to be more realisticthan the protocol model, a number of problems arise whentrying to carry out mathematical analysis in it. First, SINR ata receiver not only depends on the transmission power atthe corresponding transmitter, but also depends on thetransmission powers at other transmitters. Mathematically,SINR is a nonconvex function of multiple variables. Manyoptimization problems in the SINR model are nonconvexproblems and NP-hard. Second, since both schedulingfeasibility and the maximum allowed flow rate on each linkare determined by SINR, an optimal solution to maximizecapacity must be developed with joint consideration of
954 IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. 10, NO. 7, JULY 2011
. Y. Shi and Y.T. Hou are with the Bradley Department of Electrical andComputer Engineering, Virginia Polytechnic Institute and State Uni-versity, 302 Whittemore Hall (0111), Blacksburg, VA 24061.E-mail: {yshi, thou}@vt.edu.
. S. Kompella is with the Information Technology Division, US NavalResearch Laboratory, Washington, DC 20375.E-mail: [email protected].
. H.D. Sherali is with the Grado Department of Industrial and SystemsEngineering, Virginia Polytechnic Institute and State University, 250Durham Hall (0118), Blacksburg, VA 24061. E-mail: [email protected].
Manuscript received 10 June 2009; major revision received 3 Jan. 2010;minor revision received 27 Mar. 2010; accepted 1 July 2010; published online19 Oct. 2010.For information on obtaining reprints of this article, please send e-mail to:[email protected], and reference IEEECS Log Number TMC-2009-06-0221.Digital Object Identifier no. 10.1109/TMC.2010.204.
1536-1233/11/$26.00 � 2011 IEEE Published by the IEEE CS, CASS, ComSoc, IES, & SPS

network, link, and physical layers. Due to these difficulties,theoretical results on CRNs in the SINR model remainlimited.
In this paper, we investigate the network capacityproblem for multihop CRNs in the SINR model. For agiven instance where each node has access to a set ofavailable bands (likely heterogeneous), we study the net-work capacity problem via a cross-layer optimizationapproach. In particular, we consider how to maximize therates of a set of user communication sessions, with jointconsideration at physical layer (via power control), linklayer (via frequency band scheduling), and network layer(via flow routing). We give a mathematical characterizationof these layers and formulate a mixed integer nonlinearprogram (MINLP) problem. For this optimization problem,we first identify core optimization variables and coreoptimization space based on the physical significance ofthe variables. We devise an algorithm based on the branch-and-bound framework to obtain a ð1� "Þ optimal solution.
Although branch-and-bound framework is standard,many components within this framework are not specified.We design the following problem-specific components:1) We propose a reformulation-linearization technique(RLT) to develop a tight linear relaxation so as to obtain atight upper bound. 2) For the lower bound, we design a localsearch algorithm by analyzing and removing infeasibility inthe linear relaxation solution. 3) For problem partitioning,we propose to choose a partition variable based on itsphysical significance. With these problem-specific designs,the overall solution can find a ð1� "Þ optimal solution muchfaster than brute-force exhaustive search.
Our theoretical result offers a solution for a given networkinstance and can serve as a performance benchmark for amultihop CRN. Such a result is not yet available in theliterature. If the available bands at each node in the networkvaries on a relatively larger time scale than the execution ofour solution, then our solution can be used to compute að1� "Þ optimal result for each time period during which theavailable bands at each node are static. If the available bandsat each node in the network vary on a relatively smaller timescale, then the performance benchmark can be obtainedoffline by our solution. One can use our result as a referenceperformance benchmark to measure the quality of some otherproposed algorithms (possibly heuristic, despite distributed)that are developed for actual deployment.
The remainder of this paper is organized as follows: InSection 2, we review related work on cross-layer optimiza-tion. Section 3 gives a mathematical characterization ofpower control, scheduling, and routing in the SINR model formultihop CRNs. In Section 4, we reformulate the optimiza-tion problem and obtain a clean and compact formulation.Section 5 analyzes the core optimization space and describesthe main algorithm to obtain an ð1� "Þ optimal solution. InSection 6, we develop tight upper and lower bounds insidethe main algorithm. We discuss how to interpret and applyour theoretical result in Section 7. Section 8 presentsnumerical results and Section 9 concludes this paper.
2 RELATED WORK
There have been active research efforts on cross-layeroptimization for wireless networks. Many of these efforts
are based on the disk graph model (see, e.g., [2], [18], [20],[24] for wireless networks with traditional radios and [26],[28], [33], [34] for CRNs in particular). Under this model, theimpact of interference from neighboring nodes is solelydetermined by whether or not a node falls within theinterference range of other transmitting nodes. The con-troversy surrounding (or arguments against) the protocolmodel is that a binary decision of whether or notinterference exists (based on interference range) does notaccurately capture physical layer characteristics. As a result,the accuracy (and validity) of results developed under theprotocol model remains unclear.
In contrast, the SINR model is widely regarded as a bettermodel for interference characterization. Although suchmodel is preferred, there are many difficulties in carryingout analysis with this model due to the computationalcomplexity SINR involves, particularly when we studycross-layer optimization in a multihop environment. As aresult, many previous efforts were done on single-hopnetworks, e.g., [3], [10], [13], [14], [17]. For multihopnetworks, various simplifications have been employed. Forexample, in [4], the authors assumed synchronized powercontrol, where transmission power at each node in thenetwork is adjustable but is “synchronized” (identical).Needless to say, such synchronization in power controlcannot offer optimal network performance. There are alsosome efforts studying cross-layer problems involving twolayers instead of three layers (physical, link, and network, aswe do in this paper). For example, in [6], Bhatia andKodialam optimized power control and routing, butassumed some frequency hopping mechanism is in placefor scheduling, which helps simplify joint consideration ofscheduling. In [9], Elbatt and Ephremides optimized jointpower control and scheduling, but assumed routing wasgiven a priori. In [27], Shu and Krunz studied how tomaximize the total rate on all links in a CRN, with theconsideration of power control and channel assignment. Forcross-layer optimization in the SINR model involving threelayers (physical, link, and network), nearly all existing efforts(e.g., [7], [8]) followed a “layer-decoupled” approach tosimplify analysis. Under such an approach, the final solutionis obtained by determining algorithm/mechanism for onelayer at a time, and then piecing up them together instead ofsolving a joint optimization problem. Due to decoupling inthe solution procedure, these approaches are heuristic at bestand cannot offer any performance guarantee.
On another line of research, various efforts have beenmade to study asymptotic behavior (or scaling laws) ofwireless networks (see, e.g., [1], [5], [15], [16], [19], [21], [22],[29], [30], [31], [32]). These efforts differ from ours in thispaper, which focuses on designing optimal cross-layeralgorithms for a finite-sized network.
3 MATHEMATICAL MODELS
We consider a multihop network with a set of CR nodes N .Each node i 2 N senses its environment and finds a set ofavailable frequency bands Mi for the given time instance(i.e., those bands that are currently not used by primaryusers), which may not be the same as the availablefrequency bands at other nodes. We assume that the
SHI ET AL.: MAXIMIZING CAPACITY IN MULTIHOP COGNITIVE RADIO NETWORKS UNDER THE SINR MODEL 955

bandwidth of each frequency band (channel) is W . DenoteM the union of all frequency bands among all the nodes inthe network, i.e., M¼
Si2N Mi. Denote Mij ¼Mi
TMj,
which is the set of frequency bands that is common betweennodes i and j, and thus can be used for communicationbetween these two nodes. In the rest of this section, wepresent mathematical characterization of each layer andobtain a formulation for the capacity problem in this study.
3.1 Power Control, Scheduling, and TheirRelationship in the SINR Model
Power control on each transmitting node at the physical layeraffects SINR at a receiving node. These SINR values, in turn,will affect scheduling decision at link layer. That is, if a node isscheduled to receive, then its SINR must be at least �
(minimum requirement). Therefore, power control andscheduling are tightly coupled via SINR and cannot bemodeled separately. In this section, we formulate powercontrol, scheduling, and their relationship in the SINR model.
Scheduling for transmission at each node in the networkcan be done either in frequency domain or time domain. Inthis paper, we consider scheduling in frequency domain inthe form of assigning frequency bands (channels). Sincetime domain-based formulation is similar to that forfrequency domain, our approach can be extended to timedomain-based formulation and will yield similar results.
To maximize the capacity, there may still be concurrenttransmissions within the same channel (and thus inter-ference). Denote scheduling variables xmij as follows:
xmij ¼1 If node i transmits data to node j on band m;0 otherwise:
�
For power control, we assume that the transmission power
at a node can be tuned to a finite number of levels between 0
and Pmax. To model this discrete power control, we introduce
an integer parameter Q that represents the total number of
power levels to which a transmitter can be adjusted, i.e.,
transmission power can be 0; 1QPmax;
2QPmax; . . . ; Pmax. Denote
qmij 2f0; 1; 2; . . . ; Qg the integer levels for transmission power.
Clearly, when node i does not transmit data to node j on
band m, qmij is 0. Thus, power control and scheduling is
coupled with each other via the following relationship:
qmij2 ½1; Q� If xmij ¼ 1;¼ 0 otherwise;
�ði; j 2 N ; i 6¼ j;m 2 MijÞ: ð1Þ
Consider a transmission from node i to node j on bandm.When there is interference from concurrent transmissionson the same band, SINR at node j, denoted as smij , is
smij ¼gij
qmijQ Pmax
�W þPm2Mk
k2NPm2Mh
h2N ;h 6¼k gkjqmkh
Q Pmax
ði; j 2 N ; i 6¼ j;m 2 MijÞ;
ð2Þ
where � is the ambient Gaussian noise density and gij is thepropagation gain from node i to node j.
Note that in theory, for any small SINR, the correspondingcapacity is still positive (by Shannon’s capacity formula). Butin practice, if SINR is too small, then the achieved capacitywill also be very small. In this case, such a weak link will not
be very useful to carry traffic flow. Thus, we may use athreshold to remove such weak links from considerations. Inthis regard, we introduce a threshold for SINR, i.e., atransmission from node i to node j on band m is consideredsuccessful if and only if smij � �. Then, we have the followingcoupling relationship for scheduling (xmij ) and SINR (smij ):
xmij ¼ 1()smij � � ði; j 2 N ; i 6¼ j;m 2 MijÞ: ð3Þ
3.2 Routing and Link Capacity
We assume there is a set of L active user communication(unicast) sessions in the network. Denote sðlÞ and dðlÞ thesource and destination nodes of session l 2 L and rðlÞ theminimum rate requirement (in b/s) of session l. In ourstudy, we aim to maximize a common scaling factor K forall session rates. That is, we aim to determine the maximumK such that a rate of K � rðlÞ can be transmitted from sðlÞ todðlÞ for each session l 2 L in the network.
To route each data flow from its source node to itscorresponding destination node, multihop relaying may benecessary, due to limited transmission power at each node.Further, for optimality and flexibility, it is desirable to allowflow splitting and multipath routing. This is because asingle-path flow routing for a session is overly restrictiveand is unlikely to offer optimal solution.
Mathematically, this can be modeled as follows: DenotefijðlÞ the data rate on link i! j that is attributed to session l.If node i is the source node of session l, i.e., i ¼ sðlÞ, then
XMij 6¼;
j2N ;j6¼ifijðlÞ ¼ rðlÞK ðl 2 L; i ¼ sðlÞÞ: ð4Þ
If node i is an intermediate relay node for flow attributed tosession l, i.e., i 6¼ sðlÞ and i 6¼ dðlÞ, then
XMij 6¼;
j2N ;j6¼i;sðlÞfijðlÞ ¼
XMki 6¼;
k2N ;k 6¼i;dðlÞfkiðlÞ
ðl 2 L; i 2 N ; i 6¼ sðlÞ; dðlÞÞ:
ð5Þ
If node i is the destination node of session l, i.e., i ¼ dðlÞ, then
XMki 6¼;
k2N ;k6¼ifkiðlÞ ¼ rðlÞK ðl 2 L; i ¼ dðlÞÞ: ð6Þ
In addition to the above flow balance equations at eachnode i 2 N for session l 2 L, the aggregated flow rates oneach radio link cannot exceed this link’s capacity. For a linki! j, we have
XsðlÞ6¼j;dðlÞ6¼i
l2LfijðlÞ �
Xm2Mij
W log2ð1þ smij Þ
ði; j 2 N ; i 6¼ j;Mij 6¼ ;Þ:
ð7Þ
This constraint shows the coupling relationship betweenflow routing and SINR.
3.3 The Capacity Problem
In this paper, we study a capacity problem for multihopCRNs. For capacity problem, the simplest objective is thesum of throughput achieved by all sessions. However, such
956 IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. 10, NO. 7, JULY 2011

an objective may lead to biased rate allocation amongsessions [23]. Another objective is maxmin, i.e., maximizingthe minimum throughput among all sessions. Maxmin hasbeen used in a number of works (e.g., [15], [21]) to ensurefairness. In this work, we consider how to maximize acommon scaling factor K for all sessions under some givenminimum rate requirements rðlÞ, i.e., what is the maximumfactor K such that a rate of K � rðlÞ can be transmitted fromsðlÞ to dðlÞ for each session l 2 L in the network. Note thatthis objective is a more general form of maxmin in the sensethat when rðlÞ ¼ 1 for each session l 2 L, this objectivebecomes the maxmin throughput objective. On the otherhand, when rðlÞ 6¼ 1, i.e., the minimum required rate foreach session l may be different from session to session, theobjective function becomes to maximize each session’s rateproportional to its minimum rate requirement.
Putting together the objective and all the constraints forpower control, scheduling, and flow routing, we have thefollowing formulation:
Max K
s:t: constraints ð1Þ � ð7Þxmij 2 f0; 1g;qmij 2 f0; 1; 2; . . . ; Qg; tmi ; smij � 0
ði; j 2 N ; i 6¼ j;m 2 MijÞK; fijðlÞ � 0 ðl 2 L; i; j 2 N ; i 6¼ j; i 6¼ dðlÞ;
j 6¼ sðlÞ;Mij 6¼ ;Þ:
Note that we assume Mi, the set of current availablebands at node i, is given for a particular time instance. Thesolution to the above optimization problem will offer thebest performance for this given instance. Since Mi maychange over time, the optimal solution may also changeover time.
4 REFORMULATION
The formulation in Section 3.3 is still in a “raw” form and isthe first step in setting up our cross-layer optimizationproblem. Much work needs to be done to put it into a more“clean” and compact form that is amenable to mathematicaloperation. In this section, we analyze each constraintcarefully and perform this necessary and importantreformulation step.
. The constraint described in (1) is not suitable formathematical programming. We reformulate it withthe following linear constraint:
xmij � qmij � Qxmij ði; j 2 N ; i 6¼ j;m 2 MijÞ: ð8Þ
It is easy to verify that this constraint is equivalentto (1).
A closer look at (8), in conjunction with (2) and (3),suggests that (8) can be further simplified to removeredundancy. That is, we find that (2) and (3) yieldxmij � qmij , and thus the left-hand side (LHS) of (8) canbe removed. To show this, we consider the two casesfor xmij . For the case when xmij ¼ 0, xmij � qmij holds bythe definition of qmij . For the case when xmij ¼ 1, by (3),smij must be positive. Then by (2), qmij must also bepositive. By the definition of qmij , qmij � 1 when it is
positive. Therefore, qmij � xmij . So (8) (or (1)) can be
replaced by the following constraint:
qmij � Qxmij ði; j 2 N ; i 6¼ j;m 2MijÞ: ð9Þ
. Constraint (2) is in the form of a fraction. In amathematical programming, product is a betterform. We can rewrite it as
smij ¼gij
qmijQ Pmax
�W þPm2Mk
k2NPm2Mh
h2N ;h 6¼k gkjqmkh
Q Pmax
¼gijq
mij
�WQPmaxþPm2Mk
k2NPm2Mh
h2N ;h 6¼k gkjqmkh
ði; j 2 N ; i 6¼ j;m 2 MijÞ:
This is equivalent to
�WQ
Pmaxsmijþ
Xm2Mk
k2N
Xm2Mh
h2N ;h 6¼kgkjq
mkhs
mij � gijqmij ¼ 0
ði; j 2 N ; i 6¼ j;m 2MijÞ:ð10Þ
Note that in (10), qmkh and smij are variables while all
other symbols are constants. Thus, we have a double
sum of nonlinear terms qmkhsmij in (10). To reduce the
number of nonlinear terms, denote
tmk ¼Xm2Mh
h2N ;h6¼kqmkh ðk 2 N ;m 2 MkÞ: ð11Þ
Then, (10) can be rewritten as
�WQ
Pmaxsmij þ
Xm2Mk
k2Ngkjt
mk s
mij � gijqmij ¼ 0
ði; j 2 N ; i 6¼ j;m 2 MijÞ;ð12Þ
which now only involves a single sum of nonlinear
terms tmk smij . Note that by introducing new variables
tmk , we decrease the number of nonlinear terms from
OðjN j4 � jMjÞ in (10) to OðjN j3 � jMjÞ in (12).. Similar to (1), the constraint described in (3) is not
suitable for mathematical programming. We nowshow that (3) can be eliminated once we have (9),(12), and the following new constraint:
smij � �xmij ði; j 2 N ; i 6¼ j;m 2 MijÞ: ð13Þ
We now verify that (9), (12), and (13) can lead to the
following two relationships described in (3), i.e.,
xmij ¼ 1) smij � � ði; j 2 N ; i 6¼ j;m 2 MijÞ; ð14Þsmij � �) xmij ¼ 1 ði; j 2 N ; i 6¼ j;m 2 MijÞ: ð15Þ
First, we consider the case when xmij ¼ 1. By (13),
we have smij � �, i.e., (14) holds. Now consider the
case when smij � �. By (12), since tmk ’s are non-
negative variables and �;W;Q; Pmax; gkj; gij are all
positive constants, qmij must be positive. Then by (9),
xmij must be positive when qmij is positive. Since xmij
SHI ET AL.: MAXIMIZING CAPACITY IN MULTIHOP COGNITIVE RADIO NETWORKS UNDER THE SINR MODEL 957

can only take 0 or 1 by its definition, xmij must be 1.That is, (15) holds.
. Finally, we can prove that (6) is redundant once wehave (4) and (5). Thus, we will leave (4) and (5) in theformulation and remove constraint (6).
With these careful reformulations, we now have acleaner and more compact problem formulation, which isshown in Fig. 1.
5 SOLUTION OVERVIEW
For the optimization problem in Fig. 1, Q, �, W , �, Pmax, gij,and rðlÞ are constants and K, xmij , q
mij , tmi , smij , and fijðlÞ are
optimization variables. This formulation is a mixed integernonlinear program (MINLP), which is NP-hard in general[11] and cannot be solved by CPLEX. In Section 5.1, we firstanalyze the intricate relationship among the variables andidentify the core variables among all the variables. We showthat the dependent variables can be derived once these corevariables are fixed. We call the optimization space for thecore variables as the core optimization space. In Section 5.2,we present the main algorithm on how to determine anoptimal solution in the core optimization space.
5.1 Core Variables and Their Optimization Space
For the complex MINLP problem, its variables include xmij ,qmij , tmi , smij , fijðlÞ, and K, which collectively contribute aseemingly huge optimization space. However, a closerinvestigation of these variables show that they are inter-dependent. In particular, we find that xmij and qmij variablesare “core” variables and other variables can all be derivedby core variables. As a result, we can focus our study on anoptimization space by the core variables, which is a muchsmaller space.
We now show how to derive dependent variables fromcore variables. For tmi and smij variables, they can be derivedby (11) and (12), respectively, once xmij and qmij are given. ForfijðlÞ variables and K variable, their optimal values can bedetermined by a linear program (LP). That is, once we have
the values for all xmij and qmij variables and we havecomputed the values for all tmi and smij variables by (11)and (12), respectively, the optimization problem reduces toa network flow problem, which is an LP.
With this new understanding of optimization variables,we can now focus our efforts on the core variables xmij and qmij .
5.2 Main Algorithm
In this section, we describe our main algorithm, which isbased on the branch-and-bound framework [25]. Thosereaders who are familiar with branch-and-bound can skipthis section and go to Section 6, where we design problem-specific algorithms for each component of branch-and-bound.
Under branch-and-bound, we aim to provide a ð1� "Þoptimal solution, where " is a small positive constantreflecting our desired accuracy in the final solution. In casewe set " ¼ 0, an optimal solution can be obtained.
We can start by developing upper and lower bounds(UB and LB) for the objective function (see Fig. 2a for anexample). Branch-and-bound requires to develop problem-specific algorithms for finding upper and lower bounds,which will be described in Section 6. After we obtain thetwo bounds, we compare the gap between them. If theupper and lower bounds are close to each other, i.e.,LB � ð1� "ÞUB, then the feasible solution correspondingto the current lower bound LB is ð1� "Þ optimal and weare done.
Otherwise, we need to further narrow the gap betweenUBandLB. To do this, branch-and-bound partitions the originalproblem 1 into two new problems 2 and 3 (see Fig. 2b). This isaccomplished by choosing an appropriate core variable xmij orqmij and dividing its value set into two smaller sets. The choiceof specific core variables is important, as it affects complexity.We will show how to do this in Section 6.
After partitioning, the core optimization space is dividedinto two subspaces for problems 2 and 3, respectively. Weagain obtain upper bounds UB2 and UB3 and lower boundsLB2 and LB3 for problems 2 and 3, respectively. Since the
958 IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. 10, NO. 7, JULY 2011
Fig. 1. Problem formulation.

optimization space of problems 2 and 3 are both smaller
than that of problem 1, we can have tighter upper bounds,
i.e., maxfUB2; UB3g � UB1, which in turn yield better
lower bounds with maxfLB2; LB3g � LB1 for our max-
imization problem (see Fig. 2b). Then the upper bound of
the original problem is updated as UB ¼ maxfUB2; UB3gand the lower bound is updated as LB ¼ maxfLB2; LB3g.As a result, we now have a smaller gap between UB and
LB. Then we either have a ð1� "Þ optimal solution (if
LB � ð1� "ÞUB) or continue to choose a problem with the
maximum upper bound (problem 3 in Fig. 2b) and perform
partitioning for this problem. By choosing a problem with
the maximum upper bound for partition, we can ensure
that UB is decreased after each partition.An important technique in branch-and-bound is that we
can remove some problems from further consideration, and
thus reduce complexity. In particular, if we find a problem z
with LB � ð1� "ÞUBz (see problem 4 in Fig. 2c), we
conclude that this problem can be removed from further
consideration without loss of ð1� "Þ optimality.Fig. 3 shows the main algorithm. Since our core optimiza-
tion space is finite (with finite number of core variables xmij
and qmij , and each core variable has a finite integer value set),
the branch-and-bound algorithm is guaranteed to converge
(even for " ¼ 0) [25]. Here, branch-and-bound is much faster
than brute-force exhaustive search because nonimproving
problems are being removed during the process to avoid
wasting precious cycle time in future computation. As a
result, for all the network instances studied in Section 8,
brute-force exhaustive search cannot find an optimal
solution, while our algorithm can find near-optimal solu-
tions for all network instances (with various network sizes
and user sessions).
6 DETERMINING BOUNDS AND PARTITIONING
PROBLEMS
The main algorithm was presented in Fig. 3. Several
components (i.e., determining upper and lower bounds,
partitioning problems) in this main algorithm are yet to be
developed. These algorithms should exploit problem-
specific properties to optimize performance. In this section,
we design algorithms for these components.
6.1 Determining Upper Bound
To find an upper bound for a problem in branch-and-bound
(see lines 4 and 14 in Fig. 3), we propose to construct a linear
relaxation. That is to say, we linearize all constraints in Fig. 1
so that the relaxed problem can be solved by an LP. This
solution provides an upper bound.Note that in Fig. 1, tmk s
mij and log2ð1þ smij Þ are nonlinear
terms. For product tmk smij , we apply a novel method based on
Reformulation-Linearization Technique (RLT) [25]. This is done
by introducing a new variable umijk ¼ tmk smij and add linear
constraints for the new variable. Suppose tmk and smij are
bounded by ðtmk ÞL � tmk � ðtmk ÞU and ðsmij ÞL � smij � ðsmij ÞU ,
respectively. Thus, we have
½tmk � ðtmk ÞL� � ½smij � ðsmij ÞL� � 0;
½tmk � ðtmKÞL� � ½ðsmij ÞU � smij � � 0;
½ðtmk ÞU � tmk � � ½smij � ðsmij ÞL� � 0;
½ðtmk ÞU � tmk � � ½ðsmij ÞU � smij � � 0:
Substituting umijk ¼ tmk smij , we have the following linear
constraints for umijk:
SHI ET AL.: MAXIMIZING CAPACITY IN MULTIHOP COGNITIVE RADIO NETWORKS UNDER THE SINR MODEL 959
Fig. 2. Illustration of branch-and-bound. (a) Iteration 1. (b) Iteration 2. (c) Iteration 3.
Fig. 3. Main algorithm.

�tmk�L� smij þ
�smij�L� tmk � umijk �
�tmk�L��smij�L;�
tmk�U� smij þ
�smij�L� tmk � umijk �
�tmk�U��smij�L;�
tmk�L� smij þ
�smij�U� tmk � umijk �
�tmk�L��smij�U;�
tmk�U� smij þ
�smij�U� tmk � umijk �
�tmk�U��smij�U:
For the nonlinear term log2ð1þ smij Þ ¼ 1ln 2 lnð1þ smij Þ, we
propose to employ three tangential supports for lnð1þ smij Þ,which is a convex hull linear relaxation (see Fig. 4). Suppose
that we have the bounds for smij , i.e., ðsmij ÞL � smij � ðsmij ÞU .
We introduce a variable cmij ¼ lnð1þ smij Þ and consider how
to get a linear relaxation for cmij . The curve of cmij ¼ lnð1þ smij Þcan be bounded by four segments (or a convex hull), where
segments I, II, and III are tangential supports and segment
IV is the chord (see Fig. 4). In particular, the three tangent
segments are tangential at points ð1þ ðsmij ÞL; lnð1þ ðsmij ÞLÞÞ,ð1þ �; lnð1þ �ÞÞ, and ð1þ ðsmij ÞU ; lnð1þ ðsmij ÞUÞÞ, where
� ¼½1þðsmij ÞL� � ½1þðsmij ÞU � � ½lnð1þðsmij ÞUÞ�lnð1þðsmij ÞLÞ�
ðsmij ÞU�ðsmij ÞL� 1
is the horizontal location for the point that is intersected byextending segments I and III; segment IV is the segmentthat joins points ð1þ ðsmij ÞL; lnð1þ ðsmij ÞLÞÞ and ð1þ ðsmij ÞU ;lnð1þ ðsmij ÞUÞÞ. The convex region defined by the foursegments can be described by the following four linearconstraints:
½1þ ðsmij�L� � cmij � smij � ½1þ ðsmij ÞL� �
�ln�1þ ðsmij
�LÞ � 1
�þ 1;
ð1þ �Þ � cmij � smij � ð1þ �Þ � ½lnð1þ �Þ � 1� þ 1;
½1þ ðsmij ÞU � � cmij�smij � ½1þ ðsmij ÞU � � ½lnð1þ ðsmij ÞUÞ � 1� þ 1;
½ðsmij ÞU � ðsmij ÞL� � cmij þ ½lnð1þ ðsmij ÞLÞ � lnð1þ ðsmij ÞUÞ� � smij� ðsmij ÞU � lnð1þ ðsmij ÞLÞ � ðsmij ÞL � lnð1þ ðsmij ÞUÞ:
As a result, the nonlinear ln (or log ) term is relaxed intolinear constraints.
After relaxing all nonlinear terms for a problem, sayproblem z, we have a relaxed problem z in Fig. 5, which is anLP. In problem z, x and q are the vectors for all xmij and qmijvariables, respectively, ðxmij ÞL; ðxmij ÞU ; ðqmij ÞL, and ðqmij ÞU areconstant bounds, and �z ¼ fðx;qÞ : ðxmij ÞL � xmij � ðxmij ÞU ;ðqmij ÞL � qmij � ðqmij ÞUg is the core optimization space of ðx;qÞ.
A relaxed problem z can be solved by an LP inpolynomial time. Denote its solution as LP ðzÞ. This givesus an upper bound to problem z.
6.2 Determining Lower Bound
To find a lower bound for problem z, it is sufficient to find afeasible solution to this problem. By feasible solution, we
960 IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. 10, NO. 7, JULY 2011
Fig. 4. A convex hull for cmij ¼ lnð1þ smij Þ.
Fig. 5. Linear relaxation.

mean that it satisfies all constraints for problem z in Fig. 1,despite that the objective value corresponding to thefeasible solution may not be optimal (maximum). Althoughany feasible solution to problem z can serve as a lowerbound, we strive to find one feasible solution that can offera tight lower bound. We can find such a feasible solution(denoted as z) based on LP ðzÞ by searching its neighbor-hood, which we call local search.
The local search algorithm begins with an initial feasiblesolution. Such a solution may be far away from theoptimum and may not provide a tight lower bound. Thus,we will iteratively improve the current solution to achieve abetter lower bound. Until we can no longer improve(increase) the lower bound, we are done.
To obtain an initial feasible solution, we set xmij ¼ ðxmij ÞLfor scheduling and qmij ¼ ðqmij ÞL for power control. Then wecan compute SINR value smij by (2). When an SINR value islarger than or equal to �, the achieved capacity isW log2ð1þ smij Þ. Otherwise (i.e., SINR < �), the transmissionis considered unsuccessful. Note that although the flowrates fijðlÞ in the relaxed solution LP ðzÞ guarantee flowbalance at each node, such flow rates may exceed thecapacities on some links under the initial xmij and qmij values.To find feasible flow rates under current xmij and qmij , wecompare the achievable link capacity (under current xmijand qmij values) to the aggregated flow rates fijðlÞ on eachlink i! j by computing the ratio between the two (denotedas �ij) as follows:
�ij ¼P
m2MijW log2ð1þ smij ÞPsðlÞ6¼j;dðlÞ6¼i
l2L fijðlÞ: ð16Þ
If �ij < 1 for some link i! j, then the aggregated flow ratesexceed the link capacity and the link capacity constraint oni! j is violated. In this case, we need to scale down theflow rates on link i! j (to satisfy link capacity constraint)and the flow rates on all other links (to maintain flowbalance in the network) by a value � � �ij. On the otherhand, we want to have a � as large as possible so as tomaximize the scaling factor (our objective). Such a value isthe bottleneck value �ij among all links (denoted as�min ¼ minf�ij : i; j 2 N ; i 6¼ j;Mij 6¼ ;g). We now have acomplete solution �min � fijðlÞ, ðxmij ÞL, ðqmij ÞL for routing,scheduling, and power control, respectively. The achievedobjective is �min �K, where K is the objective value in therelaxed solution LP ðzÞ.
In the next iteration, we aim to improve the currentsolution. Note that if we can increase �min, then the currentsolution is improved. Suppose link i! j is the link with�ij ¼ �min. To increase �ij, we try to increase transmissionpower qmij on some band m under the constraint qmij � ðqmij ÞU .Based on the constraints in Fig. 1, we may update thevalues of other variables to maintain feasibility. Forexample, by the first constraint in Fig. 1, we need toincrease xmij from 0 to 1 if qmij is increased form 0 to a positivevalue. Moreover, as a consequence of increased qmij , theinterference to other transmissions on band m is increased,and thus, the achieved capacities for other links aredecreased. Thus, qmij can be successfully increased only iffor any other link k! h, its updated �kh will not fall below
the current �min. If the current solution can be improved(with a larger �min), then we continue to the next iteration ofimprovement. Otherwise, the local search algorithm termi-nates. The pseudocode of our local search algorithm isgiven in Fig. 6.
6.3 Partitioning Problem
Our proposed partitioning approach differs from that instandard branch-and-bound procedure. In standardbranch-and-bound procedure, partitioning (see line 12 inFig. 3) is done by choosing a variable with the largestrelaxation error and uses its value in the relaxed solutionLP ðzÞ to divide its value set into two smaller sets. Thereason of this approach (with the largest relaxation error) isthat such a variable is likely to lead to a larger gap betweenupper and lower bounds. Thus, we should partition itsvalue set such that the relaxation error will becomesmaller. This division (on value set) also divides theoptimization space for problem z into two smaller spaces,which result in two new problems z1 and z2, respectively.
Such standard partitioning technique, however, does notexplore any problem-specific property on choosing parti-tion variables. We find that if we weigh the significance ofeach variable when choosing a partitioning variable, thecomplexity of the overall algorithm can be decreasedsignificantly. For our problem, x variables are moreimportant than q variables. That is, we should first decidewhether or not a band is used for transmission. Only if aband is used, then we further decide the transmissionpower on this band. Thus, we first choose one x variable forpartitioning and after x variables are all determined (either0 or 1), we consider q variables for partitioning.
When choosing a specific xmij variable for partitioning, wepick the one with the maximum relaxation error, which isdefined as minfxmij ; 1� xmijg, where xmij is the relaxedsolution in LP ðzÞ and is not necessarily an integer. Oncepartitioned, the value set for this x can have element 0 or 1.This variable can be replaced by a constant 0 or 1 in the twonew subproblems.
We further observe that by fixing the value of xmij , someother variables may also be fixed. We note that by (2) and(3), a node cannot transmit and receive on the same band.That is, if a node is transmitting, its transmission power will
SHI ET AL.: MAXIMIZING CAPACITY IN MULTIHOP COGNITIVE RADIO NETWORKS UNDER THE SINR MODEL 961
Fig. 6. Pseudocode of proposed local search algorithm.

overwhelm the received power on the same band at this
node. As a result, its SINR is less than � and the node
cannot receive. Based on this observation, if the value of xmijis set to 1, then we have xmki ¼ 0 for k 2 N ; k 6¼ i;m 2 Mk
and xmjh ¼ 0 for h 2 N ; h 6¼ j;m 2Mh. On the other hand, if
the value of xmij is set to 0, then we have qmij ¼ 0 based on (1).After all x variables are fixed, we can start partition on q
variables. Again, we choose one q variable with the maximum
relaxation error for partitioning. The relaxation error of a
variable qmij is defined as minfqmij � bqmij c; bqmij c þ 1� qmij g,where qmij is the relaxed solution in LP ðzÞ and is not
necessarily integer. The value set of qmij in problem z is
fðqmij ÞL; ðqmij ÞL þ 1; . . . ; ðqmij ÞUg. Then its new value set in the
two subproblems will be fðqmij ÞL; ðqmij ÞL þ 1; . . . ; bqmij cg and
fbqmij c þ 1; bqmij c þ 2; . . . ; ðqmij ÞUg, respectively.
7 DISCUSSION
We now discuss how to interpret and apply our theoreticalresults. Note that in previous sections, the problem settingunder study and the proposed solution procedure areconcerned with an instance of CRN, where the availablebands at each node are given (static). Our theoretical resultoffers a performance benchmark for a multihop CRN. Sucha result is not yet available in the literature.
We make no claim that our solution will be deployed in itscurrent form in the real world. Instead, we position our resultto be used as a reference optimal result/performancebenchmark for any other algorithms that will be developedfor deployment. To study the performance of other proposedalgorithm, we can record its performance over a time periodT . For performance benchmarking/comparison, we can runour solution offline by breaking up the time period T intosmaller time intervals, where the available bands can beassumed static within each small time interval t1; t2; . . . . Foreach time interval ti, our algorithm can provide a solution �i.Then a complete solution � for the entire time period T isobtained by piecing up together all solutions �i. Solution � iseither optimal (by setting " ¼ 0) or near-optimal (if " > 0).1
Then we can compare how far the performance of the otherproposed algorithm is from the optimum.
8 NUMERICAL RESULTS
In this section, we present numerical results for the
proposed solution. Our goals are to demonstrate the
efficacy of the solution procedure and to offer quantitative
understanding on the joint optimization at different layers
in the SINR model.
8.1 Simulation Setting
We consider 20-, 30-, and 50-node CRNs with each node
randomly located in a 50� 50 area (see Tables 1, 3, and 8). For
the ease of exposition, we normalize all units for distance,
bandwidth, rate, and power based on (7) with appropriate
dimensions. We assume there are jMj ¼ 10, 20, and 30
frequency bands in the network for the 20-, 30-, and 50-node
CRNs and each band has a bandwidth of W ¼ 50. At each
node, only a subset of these bands is available. For the 20- and
30-node CRNs, we assume there are five user communication
sessions (see Tables 2 and 4) and for the 50-node CRN, the
number of user communication sessions is 10 (see Table 9).
The source node and destination node for each session are
randomly selected and the minimum rate requirement of
each session is randomly generated within ½1; 10�.We assume gij ¼ d�4
ij and the SINR threshold � ¼ 3 [12].
We assume that under the maximum transmission power, a
node at distance 20 can receive data when there is no
interference. Thus, we have ð20Þ�4Pmax
�W ¼ �, i.e., the maximum
transmission power is Pmax ¼ � � ð20Þ4 � �W ¼ 4:8 � 105 �W .
We assume that power control can be done in Q ¼ 10 levels.
962 IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. 10, NO. 7, JULY 2011
TABLE 1Location and Available Frequency Bands at Each Node for a 20-Node Network
1. We discuss the case of " ¼ 0. The discussion for " > 0 is similar, andthus is omitted. First of all, since available bands are static in any timeinterval ti, solution �i is optimal as we discussed in Section 5.2. That is,there is no solution �i that can achieve better performance than �i in timeinterval ti. Since this claim holds for each time interval ti, there is nosolution � that can achieve better performance than � for any time interval.Therefore, solution � is optimal.
TABLE 2Source Node, Destination Node, and Minimum Rate
Requirement of Each Session in the 20-Node Network

For our proposed solution, we set " to 0.1, which guaranteesthat the solution is at least 90 percent optimal.
We note that the brute force approach cannot solve theproblem even for the 20-node CRN. The solution space of thecapacity problem in Section 3.3 includes all possible sets ofvalues for ðxmij ; qmij ;K; fijðlÞÞ. Thus, the number of solutionsexamined in the brute force approach is clearly more than thenumber of all possible sets of values for qmij variables. Wenow analyze the number of all possible sets of values for qmijvariables for the 20-node CRN. The number of qmij variables isabout 20 � ð20� 1Þ � 5 ¼ 1;900, where 5 is an approximationof the average number of available bands on a link. Each qmijvariable has ðQþ 1Þ or 11 possible values. Thus, the numberof all possible sets of values for qmij variables is about 111900.Therefore, for the 20-node CRN, the number of solutionsexamined in the brute force approach is at least 111900.Suppose one solution can be examined in 10�6 seconds. Thenthe running time is 111900 � 10�6 > 111894 seconds, which is111894=ð365 � 24 � 60 � 60Þ > 111894=108 > 111886 years. There-fore, the brute force approach cannot be used to solve ourproblem even for the 20-node CRN.
8.2 Results
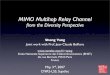
For the 20-node network with five sessions, our solutionachieves a scaling factor K ¼ 13:24. Then, based on theminimum rate requirement rðlÞ in Table 2, the flow ratesK � rðlÞ for the five sessions are 119.16, 13.24, 52.96, 39.72,26.48, respectively. Fig. 7 shows the routing topology in thefinal solution. The flow rates for each session on the linksalong its path are as follows:
Session l ¼ 1: f16;12ð1Þ ¼ 119:16; f12;8ð1Þ ¼ 103:30;
f12;11ð1Þ ¼ 15:86; f8;2ð1Þ ¼ 103:30; f11;10ð1Þ ¼ 15:86;
f2;10ð1Þ ¼ 103:30;
Session l ¼ 2: f18;20ð2Þ ¼ 13:24; f20;1ð2Þ ¼ 13:24;
f1;7ð2Þ ¼ 13:24; f7;3ð2Þ ¼ 13:24;
Session l ¼ 3: f12;11ð3Þ ¼ 52:96;
Session l ¼ 4: f13;14ð4Þ ¼ 39:72; f14;17ð4Þ ¼ 39:72;
Session l ¼ 5: f15;19ð5Þ ¼ 26:48; f19;6ð5Þ ¼ 26:48:
It is easy to verify that flow balance holds at source anddestination nodes for each session, as well as at all relaynodes. Note that flow splitting and multipath routing areused for session 1, which has the largest rate requirement.
Our solution also solves the scheduling variables xmij asfollows: Note that it is sufficient to list only nonzero xmijvariables.
Band m ¼ 1: x17;3 ¼ 1, x1
16;12 ¼ 1;
Band m ¼ 2: x28;2 ¼ 1;
Band m ¼ 3: x313;14 ¼ 1;
Band m ¼ 4: x41;7 ¼ 1, x4
2;10 ¼ 1;
Band m ¼ 5: x511;10 ¼ 1;
Band m ¼ 6: x615;19 ¼ 1;
Band m ¼ 7: x714;17 ¼ 1, x7
20;1 ¼ 1;
Band m ¼ 8: x812;11 ¼ 1;
Band m ¼ 9: x912;8 ¼ 1, x9
19;6 ¼ 1;
Band m ¼ 10: x1018;20 ¼ 1.
SHI ET AL.: MAXIMIZING CAPACITY IN MULTIHOP COGNITIVE RADIO NETWORKS UNDER THE SINR MODEL 963
TABLE 3Location and Available Frequency Bands at Each Node for a 30-Node Network
Fig. 7. The routing topology for the 20-node 5-session network.

The transmission power levels on their respectivefrequency bands are as follows:
Band m ¼ 1: q17;3 ¼ 1, q1
16;12 ¼ 7;
Band m ¼ 2: q28;2 ¼ 2;
Band m ¼ 3: q313;14 ¼ 2;
Band m ¼ 4: q41;7 ¼ 7, q4
2;10 ¼ 2;
Band m ¼ 5: q511;10 ¼ 1;
Band m ¼ 6: q615;19 ¼ 9;
Band m ¼ 7: q714;17 ¼ 1, q7
20;1 ¼ 1;
Band m ¼ 8: q812;11 ¼ 3;
Band m ¼ 9: q912;8 ¼ 1, q9
19;6 ¼ 3;
Band m ¼ 10: q1018;20 ¼ 1.
Note that the same frequency band may be used byconcurrent transmissions. For example, since x1
7;3 ¼ 1 andx1
16;12 ¼ 1, we have that both nodes 7 and 16 are transmittingon band 1. Such concurrent transmissions are allowed aslong as the SINR at each receiving node is no less than �.For example, SINR at receiving node 12 on band 1 is
s116;12¼
g16;12 � q116;12
�WQPmaxþg7;12 � q1
7;3
¼ ð1:303 � 10�5Þ � 72:083 � 10�5þð8:011 � 10�7Þ � 1¼4:22;
which is larger than � ¼ 3. Thus, transmission 16! 12 onband 1 is successful.
Following the same token, we can compute all SINR smijvalues as follows:
Band m ¼ 1: s17;3 ¼ 118:47, s1
16;12 ¼ 4:22;
Band m ¼ 2: s28;2 ¼ 5:84;
Band m ¼ 3: s313;14 ¼ 3:75;
Band m ¼ 4: s41;7 ¼ 3:33, s4
2;10 ¼ 3:14;
Band m ¼ 5: s511;10 ¼ 18:87;
Band m ¼ 6: s615;19 ¼ 3:39;
Band m ¼ 7: s714;17 ¼ 1261:14, s7
20;1 ¼ 65:46;
Band m ¼ 8: s812;11 ¼ 4:90;
Band m ¼ 9: s912;8 ¼ 3:56, q9
19;6 ¼ 4:74;
Band m ¼ 10: s1018;20 ¼ 6:45.
As expected, we see that the achieved SINR at each
receiving node on each band is larger than � ¼ 3 in our
solution.For each link, we can further verify that flow rates on this
link do not exceed its capacity. For example, for link 16! 12,
there is a flow rate f16;12ð1Þ ¼ 119:16 on this link. The achieved
capacity is W log2ð1þ s116;12Þ ¼W log2ð1þ 4:22Þ ¼ 119:21.
The above results are for 20-node network. The results
for 30- and 50-node networks are similar and we abbreviate
our discussion. For the 30-node 5-session network, the
available bands at each node and the location of each node
are shown in Table 3. The source, destination, and
minimum rate requirement of each session are shown in
Table 4. Our solution gives a routing topology in Fig. 8. The
achieved scaling factor is 31.18. Then, based on the
minimum rate requirement rðlÞ in Table 4, the flow rates
K � rðlÞ for the five sessions are 124.72, 218.26, 31.18, 249.44,
31.18, respectively. The flow rates for each session on links
along its paths are shown in Table 5. Our solution solves the
scheduling variables xmij and power control variables qmij .
964 IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. 10, NO. 7, JULY 2011
TABLE 4Source Node, Destination Node, and Minimum Rate
Requirement of Each Session in the 30-Node Network
0 5 10 15 20 25 30 35 40 45 500
5
10
15
20
25
30
35
40
45
50
1
2
3
4
5 67
8
9
10
30
11
12
13
14
15
16
17
18
19
20
2122
23
24
25
26
27
28
29
Fig. 8. The routing topology for the 30-node 5-session network.
TABLE 5Flow Rates for Each Session in the 30-Node 5-Session Network

Again, we list only nonzero xmij variables in Table 6 andnonzero qmij variables in Table 7.
For the 50-node 10-session network, the available bandsat each node and the location of each node are shown inTable 8. The source, destination, and minimum raterequirement of each session are shown in Table 9. Oursolution gives a routing topology in Fig. 9. The achievedscaling factor is 13.36. The detailed solution on powercontrol, scheduling, and routing are similar to the 20- and30-node networks and are omitted to conserve space.
In summary, we have the following observations for ournumerical results: To maximize capacity, it is necessary to
consider multipath routing (i.e., to allow flow splitting) and
to consider spatial reuse (i.e., to allow concurrent transmis-
sions to use the same band). Under multipath multihop
routing, even the number of user sessions is small, the
number of nodes in the network that will be affected by
these sessions (i.e., multihop relays) can be large.
9 CONCLUSION
In this paper, we investigated a capacity problem for a
multihop cognitive radio network under the SINR model.
We showed the complex interrelationship among power
SHI ET AL.: MAXIMIZING CAPACITY IN MULTIHOP COGNITIVE RADIO NETWORKS UNDER THE SINR MODEL 965
TABLE 8Location and Available Frequency Bands at Each Node for a 50-Node Network
TABLE 7Transmission Power Levels for the 30-Node Network
TABLE 6Scheduling for the 30-Node Network

control, scheduling, and routing in this problem and
developed a mathematical formulation for joint optimiza-
tion. We presented a solution to this problem based on
branch-and-bound framework. The novelty of our contribu-
tion is the determination of the core optimization space for
this problem, which is much smaller than the whole
optimization space, and the design of several efficient
algorithms within branch-and-bound framework that ex-
ploit the physical significance of core variables to obtain
tighter upper and lower bounds. The proposed solution is
able to guarantee ð1� "Þ optimal solution and can be used
as a performance benchmark for other proposed algorithms
in the future.
ACKNOWLEDGMENTS
The authors thank the anonymous reviewers for their
constructive comments that helped improve the paper. The
authors also thank editor Thyaga Nandagopal for his
guidance in their revision efforts and his prompt handling
of the review process. The work of Y.T. Hou and Y. Shi was
supported in part by US National Science Foundation (NSF)
Grant CNS-0721570 and US Naval Research Lab Grant
N00173-10-1-G-007. The work of S. Kompella was sup-
ported in part by the ONR. The work of H.D. Sherali was
supported in part by NSF Grant CMMI-0969169.
REFERENCES
[1] A. Agarwal and P.R. Kumar, “Capacity Bounds for Ad Hoc andHybrid Wireless Networks,” ACM SIGCOMM Computer Commu-nications Rev., vol. 34, no. 3, pp. 71-81, July 2004.
[2] M. Alicherry, R. Bhatia, and L. Li, “Joint Channel Assignment andRouting for Throughput Optimization in Multiradio WirelessMesh Networks,” Proc. ACM MobiCom, pp. 58-72, Aug.-Sept. 2005.
[3] M. Andrews and M. Dinitz, “Maximizing Capacity in ArbitraryWireless Networks in the SINR Model: Complexity and GameTheory,” Proc. IEEE INFOCOM, pp. 1332-1340, Apr. 2009.
[4] A. Behzad and I. Rubin, “Impact of Power Control on thePerformance of Ad Hoc Wireless Networks,” Proc. IEEEINFOCOM, pp. 102-113, Mar. 2005.
[5] V. Bhandari and N.H. Vaidya, “Capacity of Multichannel WirelessNetworks with Random (c, f) Assignment,” Proc. ACM MobiHoc,pp. 229-238, Sept. 2007.
[6] R. Bhatia and M. Kodialam, “On Power Efficient Communicationover Multihop Wireless Networks: Joint Routing, Scheduling andPower Control,” Proc. IEEE INFOCOM, pp. 1457-1466, Mar. 2004.
[7] C.C. Chen and D.S. Lee, “A Joint Design of Distributed QoSScheduling and Power Control for Wireless Networks,” Proc. IEEEINFOCOM, Apr. 2006.
[8] R.L. Cruz and A.V. Santhanam, “Optimal Routing, Link Schedul-ing and Power Control in Multihop Wireless Networks,” Proc.IEEE INFOCOM, pp. 702-711, Mar.-Apr. 2003.
[9] T. Elbatt and A. Ephremides, “Joint Scheduling and PowerControl for Wireless Ad-Hoc Networks,” Proc. IEEE INFOCOM,pp. 976-984, June 2002.
[10] A. Fanghanel, T. Kesselheim, H. Racke, and B. Vocking,“Oblivious Interference Scheduling,” Proc. ACM SIGACT-SIGOPSSymp. Principles of Distributed Computing, pp. 220-229, Aug. 2009.
[11] M.R. Garey and D.S. Johnson, Computers and Intractability: A Guideto the Theory of NP-Completeness, pp. 245-248. W.H. Freeman andCompany, 1979.
[12] A.J. Goldsmith and S.-G. Chua, “Adaptive Coded Modulation forFading Channels,” IEEE Trans. Communications, vol. 46, no. 5,pp. 595-602, May 1998.
[13] O. Goussevskaia, Y.A. Oswald, and R. Wattenhofer, “Complexityin Geometric SINR,” Proc. ACM MobiHoc, pp. 100-109, Sept. 2007.
[14] O. Goussevskaia and R. Wattenhofer, “Capacity of ArbitraryWireless Networks,” Proc. IEEE INFOCOM, pp. 1872-1880, Apr.2009.
[15] P. Gupta and P.R. Kumar, “The Capacity of Wireless Networks,”IEEE Trans. Information Theory, vol. 46, no. 2, pp. 388-404, Mar.2000.
[16] A.-K. Haddad and R. Riedi, “Bounds for the Capacity of WirelessMultihop Networks Imposed by Topology and Demand,” Proc.ACM MobiHoc, pp. 256-265, Sept. 2007.
[17] M.M. Halldorsson and R. Wattenhofer, “Wireless Communicationis in APX,” Proc. Int’l Colloquium on Automata, Languages andProgramming, pp. 525-536, July 2009.
[18] K. Jain, J. Padhye, V. Padmanabhan, and L. Qiu, “Impact ofInterference on Multihop Wireless Network Performance,” Proc.ACM MobiCom, pp. 66-80, Sept. 2003.
[19] S.-W. Jeon, N. Devroye, M. Vu, S.-Y. Chung, and V. Tarokh,“Cognitive Networks Achieve Throughput Scaling of a Homo-geneous Network,” Proc. ICST Int’l. Symp. Modeling and Optimiza-tion in Mobile, Ad Hoc, and Wireless Networks (WiOpt), June 2009.
[20] M. Kodialam and T. Nandagopal, “Characterizing the CapacityRegion in Multiradio Multichannel Wireless Mesh Networks,”Proc. ACM MobiCom, pp. 73-87, Aug.-Sept. 2005.
[21] P. Kyasanur and N.H. Vaidya, “Capacity of Multichannel WirelessNetworks: Impact of Number of Channels and Interfaces,” Proc.ACM MobiCom, pp. 43-57, Aug.-Sept. 2005.
966 IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. 10, NO. 7, JULY 2011
Fig. 9. The routing topology for the 50-node 10-session network.
TABLE 9Source Node, Destination Node, and Minimum Rate
Requirement of Each Session in the 50-Node Network

[22] S. Li, Y. Liu, and X.-Y. Li, “Capacity of Large Scale WirelessNetworks under Gaussian Channel Model,” Proc. ACM MobiCom,pp. 140-151, Sept. 2008.
[23] B. Radunovic and J.-Y. Le Boudec, “Rate Performance Objectivesof Multihop Wireless Networks,” Proc. IEEE INFOCOM, pp. 1916-1927, Mar. 2004.
[24] K. Ramachandran, E. Belding-Royer, K. Almeroth, and M.Buddhikot, “Interference-Aware Channel Assignment in Multi-radio Wireless Mesh Networks,” Proc. IEEE INFOCOM, Apr. 2006.
[25] H.D. Sherali and W.P. Adams, A Reformulation-LinearizationTechnique for Solving Discrete and Continuous Nonconvex Problems,Kluwer Academic, 1999.
[26] Y. Shi and Y.T. Hou, “Optimal Power Control for MultihopSoftware Defined Radio Networks,” Proc. IEEE INFOCOM,pp. 1694-1702, May 2007.
[27] T. Shu and M. Krunz, “Coordinated Channel Access in CognitiveRadio Networks: A Multilevel Spectrum Opportunity Perspec-tive,” Proc. IEEE INFOCOM, pp. 2976-2980, Apr. 2009.
[28] D. Ugarte and A.B. McDonald, “On the Capacity of DynamicSpectrum Access Enabled Networks,” Proc. IEEE DySPAN,pp. 630-633, Nov. 2005.
[29] M. Vu, N. Devroye, M. Sharif, and V. Tarokh, “Scaling Laws ofCognitive Networks,” Proc. ICST Int’l Conf. Cognitive RadioOriented Wireless Networks and Communications (CrownCom),pp. 2-8, July-Aug. 2007.
[30] Z. Wang, P. Giaccone, and E. Leonardi, “A Unifying Perspectiveon the Capacity of Wireless Ad Hoc Networks,” Proc. IEEEINFOCOM, pp. 211-215, Apr. 2008.
[31] Y. Xu and W. Wang, “Scheduling Partition for Order OptimalCapacity in Large-Scale Wireless Networks,” Proc. ACM MobiCom,pp. 109-120, Sept. 2009.
[32] C. Yin, L. Gao, and S. Cui, “Scaling Laws of Overlaid WirelessNetworks: A Cognitive Radio Network vs. a Primary Network,”Proc. IEEE GLOBECOM, pp. 1235-1239, Nov.-Dec. 2008.
[33] Y. Yuan, P. Bahl, R. Chandra, T. Moscibroda, and Y. Wu,“Allocating Dynamic Time-Spectrum Blocks in Cognitive RadioNetworks,” Proc. ACM MobiHoc, pp. 130-139, Sept. 2007.
[34] J. Zhao, H. Zheng, and G. Yang, “Distributed Coordination inDynamic Spectrum Allocation Networks,” Proc. IEEE DySPAN,pp. 259-268, Nov. 2005.
Yi Shi received the PhD degree in computerengineering from Virginia Polytechnic Instituteand State University (Virginia Tech) in 2007. Heis currently a research scientist in the Departmentof Electrical and Computer Engineering atVirginia Tech. His research focuses on algo-rithms and optimization for cognitive radio net-works, MIMO and cooperative communicationnetworks, sensor networks, and ad hoc net-works. He was a recipient of the IEEE INFOCOM
2008 Best Paper Award and the Chinese Government Award forOutstanding PhD Students Abroad in 2006. He served as a TPC memberfor many major international conferences (including ACM MobiHoc 2009and IEEE INFOCOM 2009-2011). He is a member of the IEEE.
Y. Thomas Hou received the PhD degree inelectrical engineering from the PolytechnicInstitute of New York University in 1998. From1997 to 2002, he was a researcher at FujitsuLaboratories of America, Sunnyvale, California.Since 2002, he has been with the BradleyDepartment of Electrical and Computer Engi-neering, Virginia Polytechnic Institute and StateUniversity (Virginia Tech), Blacksburg, Virginia,where he is now an associate professor. His
research interests include cross-layer design and optimization forcognitive radio wireless networks, cooperative communications,MIMO-based ad hoc networks, video communications over dynamicad hoc networks, and algorithm design for sensor networks. He is arecipient of a US Office of Naval Research (ONR) Young InvestigatorAward (2003) and a US National Science Foundation CAREER Award(2004) for his research on optimizations and algorithm design forwireless ad hoc and sensor networks. He received five best paperawards from IEEE (including the IEEE INFOCOM 2008 Best PaperAward and the IEEE ICNP 2002 Best Paper Award) and holds fiveUnited States patents. He is a senior member of the IEEE.
Sastry Kompella received the BE degree inelectronics and communication engineering fromAndhra University, India, in May 1996, the MSdegree in electrical engineering from TexasTech University in May 1998, and the PhDdegree in electrical and computer engineeringfrom the Virginia Polytechnic Institute and StateUniversity, Blacksburg, Virginia, in 2006. Cur-rently, he is a researcher in the InformationTechnology Division at the US Naval Research
Laboratory, Washington, DC. His research interests include cross-layerdesign, optimization, and scheduling in wireless networks. He is amember of the IEEE.
Hanif D. Sherali is a University Distinguishedprofessor and the W. Thomas Rice chairedprofessor of engineering in the Industrial andSystems Engineering Department, Virginia Poly-technic Institute and State University. His areasof research interest include analyzing problemsand designing algorithms for specially structuredlinear, nonlinear, and integer programs arising invarious applications, global optimization meth-ods for nonconvex programming problems,
location and transportation theory and applications, and economicand energy mathematical modeling and analysis. He has publishedmore than 200 refereed articles in various operations research journals,has (co)authored six books in this area, and serves on the editorialboard of eight journals. He is an elected member of the US NationalAcademy of Engineering.
. For more information on this or any other computing topic,please visit our Digital Library at www.computer.org/publications/dlib.
SHI ET AL.: MAXIMIZING CAPACITY IN MULTIHOP COGNITIVE RADIO NETWORKS UNDER THE SINR MODEL 967