Embed Size (px)
Citation preview

HCS08Microcontrollers
freescale.com
DRM090Rev.010/2007
User Manual
MC9S08AW60 Controller Board


Preface0.1 Audience . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50.2 Organization. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50.3 Notation Conventions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60.4 Definitions, Acronyms, and Abbreviations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60.5 References. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Chapter 1 Introduction
1.1 MC9S08AW60 Controller Board Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.2 MC9S08AW60 Controller Board Configuration Jumpers. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.3 MC9S08AW60 Controller Board Connections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Chapter 2 Technical Summary
2.1 MC9S08AW60 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.2 RS-232 Serial Communications. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.3 Clock Source . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.4 User LED . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.5 Debug Support. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.5.1 BACKGROUND Header. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.6 RESET . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.7 General-Purpose Buttons and Run/Stop Switch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.8 Power Supply. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202.9 UNI-3 Interface. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212.9.1 UNI-3 BRAKE and PFC Signals. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222.10 Motor Control PWM Signals and LEDs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222.11 Motor Protection Logic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242.11.1 Over-Current and Over-Voltage Protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252.11.2 Temperature Sensing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252.12 DC Bus Current Sensing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262.13 Back-EMF Current Sensing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272.14 Quadrature Encoder/Hall-Effect Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272.15 Tacho-Generator Interface. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282.16 Peripheral Expansion Connectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282.16.1 Encoder Expansion Connector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292.16.2 Tacho-Dynamo Expansion Connector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292.16.3 Port A Header . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302.16.4 Port D Header . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302.16.5 PORT CE Header . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312.16.6 ADC Header. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312.16.7 PWM Header . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322.16.8 KBI Header. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322.16.9 ZGB Header . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 332.17 Test Points . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0. Draft A
Freescale Semiconductor 3

Appendix A. MC9S08AW60 Controller Board Schematics
Appendix B. MC9S08AW60 Controller Board PCB
Appendix C. MC9S08AW60 Controller Board Bill of Materials
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0. Draft A
4 Freescale Semiconductor

Preface
This reference manual describes the hardware on the MC9S08AW60 controller board. The board is designed for motor/motion control demos and supports specific customer needs, including the PWM interface with dead-time insertion circuit and tacho-dynamo hardware interface.
0.1 Audience
This document is intended for application developers who are creating software for devices using the MC9S08AWXX.
0.2 Organization
This manual is organized into two chapters and three appendixes.• Introduction provides an overview of the board and its features.• Technical Summary describes the MC9S08AW60 controller board hardware.• MC9S08AW60 Controller Board Schematics contains the schematics of the MC9S08AW60
controller board.• MC9S08AW60 Controller Board PCB contains details on the MC9S08AW60 printed circuit board
(PCB).• MC9S08AW60 Controller Board Bill of Materials lists materials used on the MC9S08AW60
controller board.
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
Freescale Semiconductor 5

Preface
0.3 Notation Conventions
This document uses the following conventions:
0.4 Definitions, Acronyms, and Abbreviations
Definitions, acronyms, and abbreviations used in this document are defined below.
Table 0-1. Notation Conventions
Term or Value Symbol Examples Exceptions
Active high signals (logic one)
No special symbol attached to the signal name
MOSI1SCL1
Active low signals(logic zero)
Noted with an overbar in text and in most figures
RESETSS1
In schematic drawings, active low signals may be noted by a slash: /RESET
Hexadecimal values Begin with a “$” symbol$0FF0$80
Decimal valuesNo special symbol attached to the number
1034
Binary valuesBegin with the letter “b” attached to the number
b1010b0011
NumbersConsidered positive unless specifically noted as a negative value
5–10
Voltage is often shown as positive: +3.3 V
BoldReference sources, paths, emphasis
...see: http://www.freescale.com/mcu
A/D Analog to digital
D/A Digital to analog
FLL Frequency-locked loop
GPIO General-purpose input and output port on Freescale Semiconductor’s family of microcontrollers
IC Integrated circuit
LED Light-emitting diode
LQFP Low-profile quad flat pack
MCU Microcontroller unit
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
6 Freescale Semiconductor

References
0.5 References
The following sources were referenced to produce this manual:
MC9S08AW60 Microcontroller Data Sheet, Freescale Semiconductor
MPIO Multi-purpose input and output port on Freescale Semiconductor’s family of microcontrollers; shares package pins with other peripherals on the chip and can function as a GPIO
PCB Printed circuit board
PWM Pulse-width modulation
Quadrature encoder Sensor for the measurement of position and speed based on optical principles
RAM Random access memory
R/C Resistor/capacitor network
ROM Read-only memory
SCI Serial communications interface
SPI Serial peripheral interface port on Freescale Semiconductor’s microcontrollers
UART Universal asynchronous receiver/transmitter
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
Freescale Semiconductor 7

Preface
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
8 Freescale Semiconductor

Chapter 1 Introduction
The MC9S08AW60 controller board is used to demonstrate the abilities of the populated MC9S08AW60 part, which can be replaced by the pin compatible MC9S08AW48/32 in LQFP 64-pin footprint, based on an optimized PCB and power-supply design. The MC9S08AW60 contoller board provides a hardware tool allowing the development of applications that use the MC9S08AW60/48/32. This guide refers to MC9S08AW60.
The MC9S08AW60 controller board is an evaluation module board that includes a MC9S08AW60 part, PWM interface with hardware dead-time insertion circuit, encoder interface, tacho-generator interface, communication options, digital and analog power supplies, and peripheral expansion connectors. The expansion connectors are for signal monitoring and feature expansion. Test pads are provided for monitoring critical signals and voltage levels.
The MC9S08AW60 controller board is designed to:• Familiarize you with the features of the HCS08 architecture.• Serve as a platform for real-time software development. The tool suite enables you to develop and
simulate routines, download the software to on-chip memory, run it, and debug it via the BACKGROUND port. The breakpoint features enable you to easily specify complex break conditions and to execute user-developed software at full speed, until the break conditions are satisfied. The ability to examine and modify all user accessible registers, memory, and peripherals through the BACKGROUND port facilitates the task of the developer.
• Serve as a platform for hardware development. The hardware platform enables you to connect external hardware modules. The BACKGROUND port's unobtrusive design makes all memory on the microcontroller chip available.
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
Freescale Semiconductor 9

Introduction
1.1 MC9S08AW60 Controller Board Architecture
The MC9S08AW60 controller board facilitates the evaluation of various MC9S08AW60 features. The MC9S08AW60 controller board can be used to develop real-time software and hardware products based on the MC9S08AW60. The MC9S08AW60 controller board provides the features necessary to write and debug software, demonstrate the functionality of that software, and interface with application-specific devices. The MC9S08AW60 controller board is flexible enough to allow you to exploit the MC9S08AW60's features to optimize the performance of the product, as shown in Figure 1-1.
Figure 1-1. Block Diagram of the MC9S08AW60 Controller Board
MC9S08AW60
BKGD / MS
+5 V powersupply
+3.3 V analog power supply
+3.3 V digital power supply
BACKGROUNDheader
PTF
UNI–3expansionconnector
+12 V powersupply
UNI–3expansionconnector
PWM LEDs
User LED
Encoder interface
RS 232interface
ZGBheader SCI2 / PTC
VDDAD
VDD
CRYSTAL (optional)
RESETbutton RESET
XTAL / PTG
Dead-timeinsertion
circuit
PORT CE HEADER
Toggleswitch
Tacho-generator Interface
PWM HEADER
PORT D HEADER
ADC HEADER
DCBI PEAK &AVERAGE
PORT A HEADER
KBI HEADER
Protectionlogic
UP, DOWNbuttons
PTE
PTC
PTD
ADC / PTB
PTA
PTG
IRQ
PWM
PFC, BRAKE
BEMFDCBIDCBV
IRQ
D4
F0 – 3
F4 – 7
E2, 3
E0, 1, 4 – 7C0, 1
C4
C6
C2
D0
D1, 2, 3, 5
DC
BV
DC
BI
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
10 Freescale Semiconductor
MC9S08AW60 Controller Board Configuration Jumpers
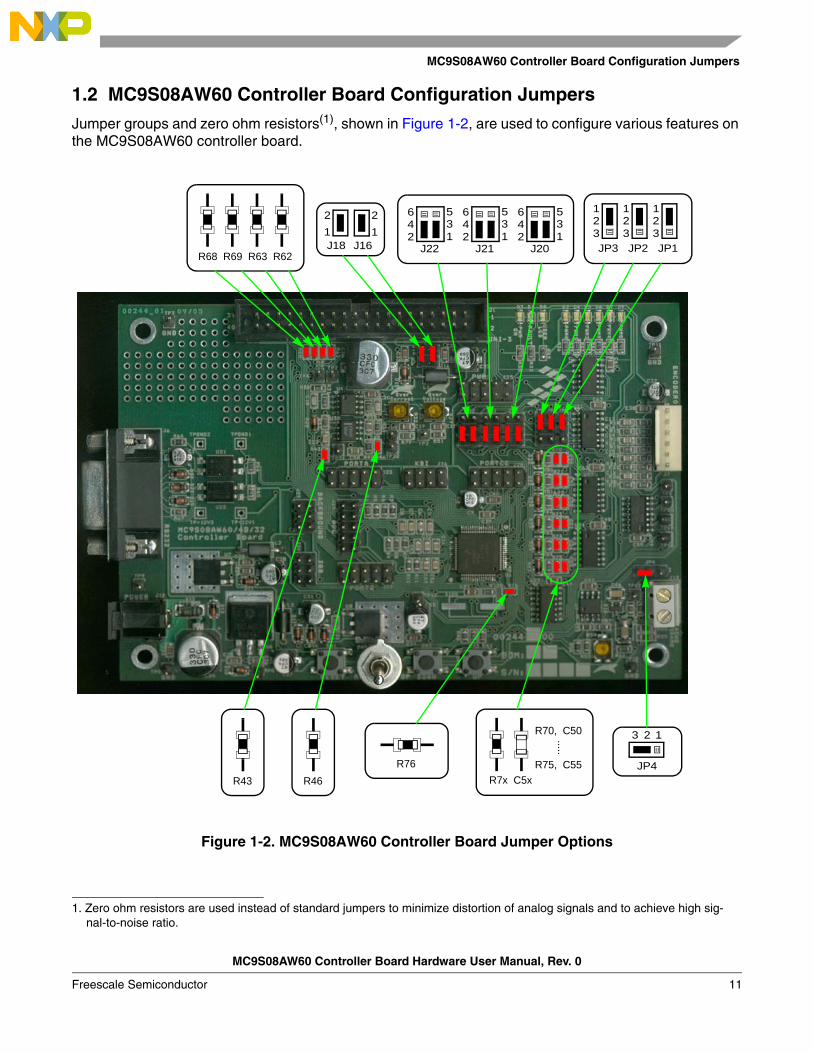
1.2 MC9S08AW60 Controller Board Configuration Jumpers
Jumper groups and zero ohm resistors(1), shown in Figure 1-2, are used to configure various features on the MC9S08AW60 controller board.
Figure 1-2. MC9S08AW60 Controller Board Jumper Options
1. Zero ohm resistors are used instead of standard jumpers to minimize distortion of analog signals and to achieve high sig-nal-to-noise ratio.
R68 R69 R63 R62
00
23
JP4
1
21J18
21
J16
21
JP33
J22
35
146
2
00 21
JP23
21
JP13
J21
35
146
2J20
35
146
2
R46
0
R76
0
R7x C5x
0
R70, C50
R75, C55
.....
R43
0
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
Freescale Semiconductor 11

Introduction
Table 1-1. MC9S08AW60 Controller Board Jumper Options
# Selector Function Connections
JP1JP2JP3
PWM complementary
mode
Odd PWM channels generated by hardware from even PWM channels 1–2
Odd PWM channels generated by odd TPM1CHx channels 2–3
JP4Tacho-dynamo measurement
Analog sensing by TACHO analog input (AD1P8) 1–2
Digital sensing by digital input (GPIO PTC2) 2–3
J16 UNI–3 +5 V Controller board digital power supply from UNI–3 +5 V closed
J18 UNI–3 +15 V Controller board analog power supply from UNI–3 +15 V closed
J20J21J22
PWM modeComplementary PWM mode 1–3, 2–4
Independent PWM mode 3–5, 4–6
R43DC bus current peak value sensed by the AD1P2 analog input R43 present
AD1P2 input used as a universal analog input on the ADC header R43 absent
R46DC bus current average value sensed by the AD1P3 analog input R46 present
AD1P3 input used as a universal analogue input on the ADC header R46 absent
R62UNI–3 BRAKE signal controlled by the PTD1 output pin R62 present
PTD1 used as a universal GPIO pin on PORT D header R62 absent
R63UNI–3 PFC PWM signal controlled by the PTD2 output pin R63 present
PTD2 used as a universal GPIO pin on PORT D header R63 absent
R68UNI–3 PFC zero cross output signal connected to the PTD3 input pin R68 present
PTD3 used as a universal GPIO pin on PORT D header R68 absent
R69UNI–3 PFC enable signal controlled by the PTD5 output pin R69 present
PTD5 used as a universal GPIO pin on PORT D header R69 absent
R76Encoder output connected to the TPM2CLK/PTD4 input R76 present
TPM2CLK/PTD4 used as a universal GPIO pin on PORT D header R76 absent
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
12 Freescale Semiconductor

MC9S08AW60 Controller Board Connections
1.3 MC9S08AW60 Controller Board Connections
Figure 1-3 shows the connection between the PC, external 12 V DC power supply, and the MC9S08AW60 controller board.
When optoisolation is needed to isolate the computer from the motor driver board and the controller board, use the optoisolated parallel command converter instead of the non-isolated parallel command converter. Command converters with ISA, PCI, USB, and ETHERNET interfaces are available.
To connect the MC9S08AW60 controller board cables:1. Connect the parallel extension cable to the parallel port of the host computer. 2. Connect the other end of the parallel extension cable to the parallel command converter (see
Figure 1-3) and connect it to the BACKGROUND header on the MC9S08AW60 controller board. Pin 1 on the command converter must be aligned with pin 1 on the controller board. This provides the connection that allows the host computer to control the board.
3. Connect the 2.1 mm output power plug from the external power supply into the power jack (see Figure 1-3) on the MC9S08AW60 controller board.
4. Apply power to the external power supply. The green power-on LED will illuminate when power is correctly applied.
Figure 1-3. Connecting the MC9S08AW60 Controller Board Cables
PC-compatible cablecomputer
Parallel extension
MC9S08AW60CB
External12 V
power
BACKGROUND
Power
Connect cableto parallel/printer port with 2.1 mm,
receptacleconnector
Parallelcommandconverter*
* Use optoisolated PCC for high-voltage applications
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
Freescale Semiconductor 13

Introduction
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
14 Freescale Semiconductor

Chapter 2 Technical Summary
The MC9S08AW60 controller board is designed as a versatile development card for developing real-time software and hardware products to support a new generation of applications in servo and motor control, SMPS, and other general purpose applications. The power of the 8-bit MC9S08AW60 microcontroller unit, combined with the hall-effect/quadrature encoder interface, PWM interface with dead-time insertion circuit, tacho-generator interface for digital/analog sensing, motor over-current logic, and motor over-voltage logic, makes the MC9S08AW60 controller board ideal for developing and implementing many motor controlling algorithms, and for learning the architecture and instruction set of the MC9S08AW60 microcontroller.
The features of the MC9S08AW60 controller board include:• MC9S08AW60 8-bit +3.3 V microcontroller operating at 40 MHz• BACKGROUND interface header for an external debug host target interface• RS-232 interface with galvanic isolation for easy connection to a host computer or PC master
development tool• Header allowing you to attach a port A GPIO compatible peripheral• Header allowing you to attach a port D (GPIO, ADC, KBI, TPM) compatible peripheral• Header allowing you to attach a port CE (GPIO, IIC, SCI, SPI) compatible peripheral• Header allowing you to attach a ADC compatible peripheral• Header allowing you to attach a PWM compatible peripheral• Header allowing you to attach a KBI / port G GPIO compatible peripheral• Header allowing you to attach the ZigBee module or other SCI compatible peripheral• On-board power regulation from an external 12 V DC supplied power input• Light-emitting diode (LED) power indicator• Six on-board PWM monitoring LEDs• One on-board PWM fault monitoring LED• One on-board general-purpose LED• UNI-3 motor interface
– DC bus voltage sensing– DC bus current sensing– Back-EMF sensing– Temperature sensing– Pulse-width modulation– BRAKE, PFC PWM signals
• Encoder/gall-effect interface• Tacho-generator interface• PWM dead-time insertion circuit• DC bus over-current and over-voltage protection logic• DC bus current peak detector and average value sensing• Manual reset push-button
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
Freescale Semiconductor 15

Technical Summary
• General-purpose push-button for up on GPIO PTG1• General-purpose push-button for down on GPIO PTG0• General-purpose toggle switch for run/stop control on GPIO PTC4
2.1 MC9S08AW60
The MC9S08AW60 controller board uses a Freescale Semiconductor part, MC9S08AW60, MC9S08AW48, or MC9S08AW32, designated as U1 on the board and in the schematics. This part operates at a maximum speed of 40 MHz. The following documents provide a full description of the MC9S08AW60, including functionality information:
• MC9S08AW60 Data Sheet, (MC9S08AW60/D): Provides features list and specifications including signal descriptions, electrical and timing specifications, pin descriptions, device specific peripheral information, and package descriptions. Also provides an overview description of the microcontroller unit and detailed information about the on-chip components, including the memory and I/O maps, peripheral functionality, and control/status register descriptions for each subsystem.
Refer to these documents for detailed information about chip functionality and operation. They can be found at www.freescale.com/mcu.
2.2 RS-232 Serial Communications
The MC9S08AW60 controller board provides an RS-232 interface by the use of RS-232 level converter circuitry (see Figure 2-1). The RS-232 level converter transitions the SCI UART’s +3.3 V signal levels to RS-232 compatible signal levels and connects to the host’s serial port via the DB9F connector. Table 2-1 lists the pinout of the RS232 connector. The RxD and TxD signals are also wired to the BACKGROUND and ZGB headers so you can connect the external modules with 3.3 V signal levels logic to this SCI UART. If needed, the +12 V can be connected to the RS232 connector, pin number 1, by shorting the TP+12V1 and TP+12V2 test points. Also, the associated TPGND1 and TPGND2 test points have to be shorted.
Figure 2-1. Schematic Diagram of the RS-232 Interface
MC9S08AW60
RS-232Level interface
PTC3 / TxD2
PTC5 / RxD2
6
3
27
84
5x
1
9
RS-232
x
x
Galvanic isolation
TxD2
RxD2
TPGND2TPGND1 J6
TP+12V2TP+12V1+12 V
BACKGROUND, ZGB HEADER
BACKGROUND, ZGB HEADER
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
16 Freescale Semiconductor

Clock Source
.
2.3 Clock Source
The MC9S08AW60 uses its internal 243 kHz reference generator and internal FLL to multiply the input frequency and achieve 40 MHz maximum operating frequency. This reference generator can be trimmed for finer accuracy via software when a precisely timed event is input to the MCU. This provides a reliable, low-cost clock source. As an MC9S08AW60 clock source, an optionally connected external crystal or resonator can also be used, attached to pins XTAL and EXTAL.
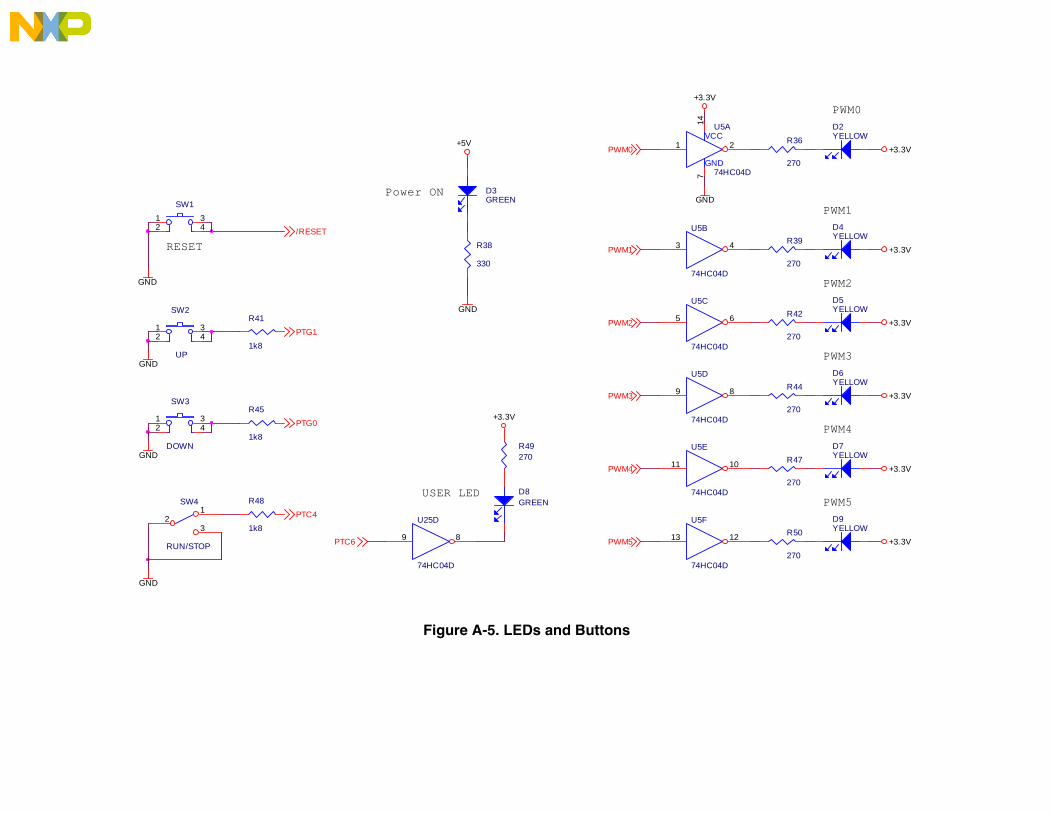
2.4 User LED
One on-board green LED D8 is provided to be controlled by your program. This diode is accessible via GPIO PTC6 port (see Figure 2-2). Setting GPIO PTC6 to a logic 1 value will turn on the LED.
Figure 2-2. Schematic Diagram of LED Connection
2.5 Debug Support
The MC9S08AW60 controller board has a BACKGROUND interface connector for external target interface support.
Table 2-1. RS-232 Serial Connector Description
J6
Pin # Signal Pin # Signal
1 +12 V (optional) 6 NC
2 RxD 7 RTS
3 TxD 8 NC
4 DTR 9 NC
5 GND
MC9S08AW60
PTC6
LED
GREEN LED
+3.3 V
D8
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
Freescale Semiconductor 17

Technical Summary
2.5.1 BACKGROUND Header
The BACKGROUND header on the MC9S08AW60 controller board allows the connection of an external host target interface for downloading programs and working with the MC9S08AW60’s registers. This header is used to communicate with an external host target interface passing information and data back and forth to a host processor running a debugger program. Table 2-2 shows the pinout for this header.
2.6 RESET
A RESET push-button is provided for asserting the MC9S08AW60 RESET signal (see Figure 2-3). The RESET signal is also attached to the BACKGROUND header J29, pin number 4.
Figure 2-3. RESET Button
Table 2-2. BACKGROUND Header Description
J29
Pin # Signal Pin # Signal
1 BKGD/MS 2 GND
3 RxD2 4 RESET
5 TxD2 6 +3.3V
MC9S08AW60
RESET
RESET
J29BACKGROUND Header
RESET4
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
18 Freescale Semiconductor

General-Purpose Buttons and Run/Stop Switch
2.7 General-Purpose Buttons and Run/Stop Switch
Two on-board push-button switches and one toggle switch are provided for program control. The push-buttons (up, down) are directly connected to the port G GPIO signals PTG1 (up/SW2) and PTG0 (down/SW3). These signals are also attached to the KBI header. A run/stop toggle switch is connected to the port C GPIO signal PTC4 (see Figure 2-4).
Figure 2-4. Schematic Diagram of the Buttons and Switch
Table 2-3. Connection Description of the Buttons and Switch
SWITCH SIGNAL
DOWN (SW3) GPIO PTG0
UP (SW2) GPIO PTG1
RUN/STOP (SW4) GPIO PTC4
MC9S08AW60
PTG1 / KBI1P1
PTG0 / KBI1P0
PTC4
START/STOP
DOWN
UP
KBI HEADER
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
Freescale Semiconductor 19
Technical Summary
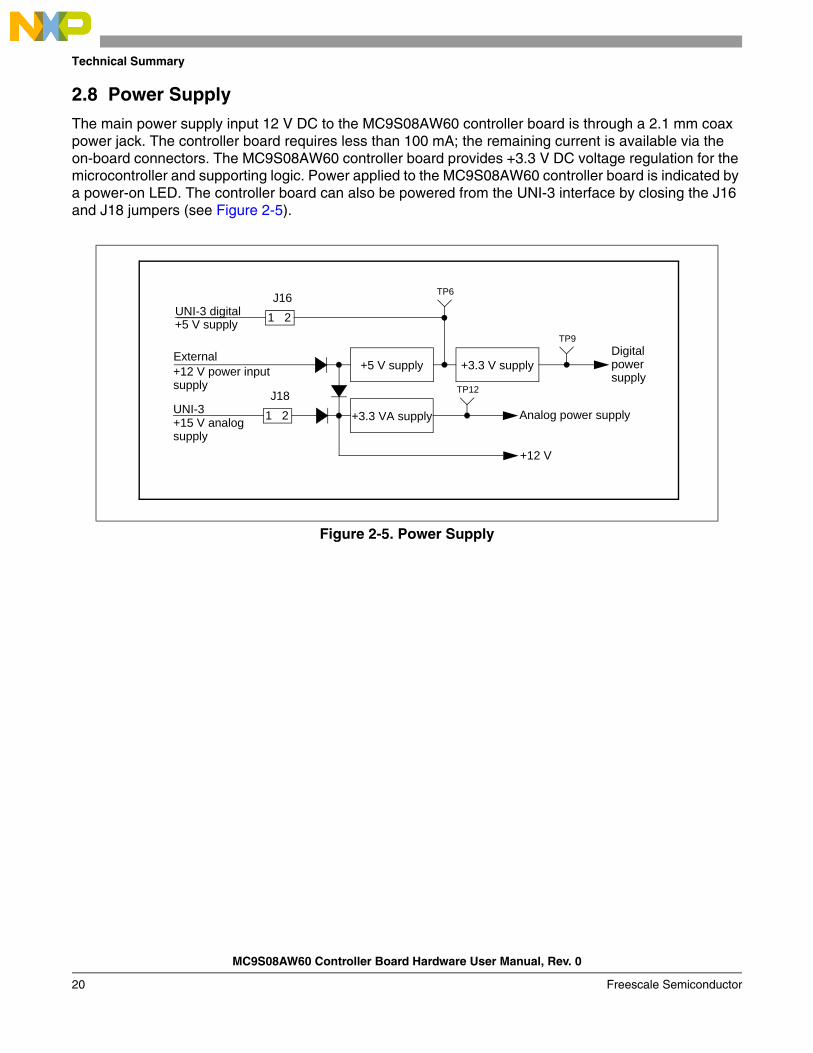
2.8 Power Supply
The main power supply input 12 V DC to the MC9S08AW60 controller board is through a 2.1 mm coax power jack. The controller board requires less than 100 mA; the remaining current is available via the on-board connectors. The MC9S08AW60 controller board provides +3.3 V DC voltage regulation for the microcontroller and supporting logic. Power applied to the MC9S08AW60 controller board is indicated by a power-on LED. The controller board can also be powered from the UNI-3 interface by closing the J16 and J18 jumpers (see Figure 2-5).
Figure 2-5. Power Supply
External+12 V power input +5 V supply
UNI-3+15 V analog +3.3 VA supply
+3.3 V supply
UNI-3 digital+5 V supply
Analog power supply
Digitalpowersupply
1 2J16
1 2J18
supply
supply+12 V
TP6
TP9
TP12
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
20 Freescale Semiconductor
UNI-3 Interface
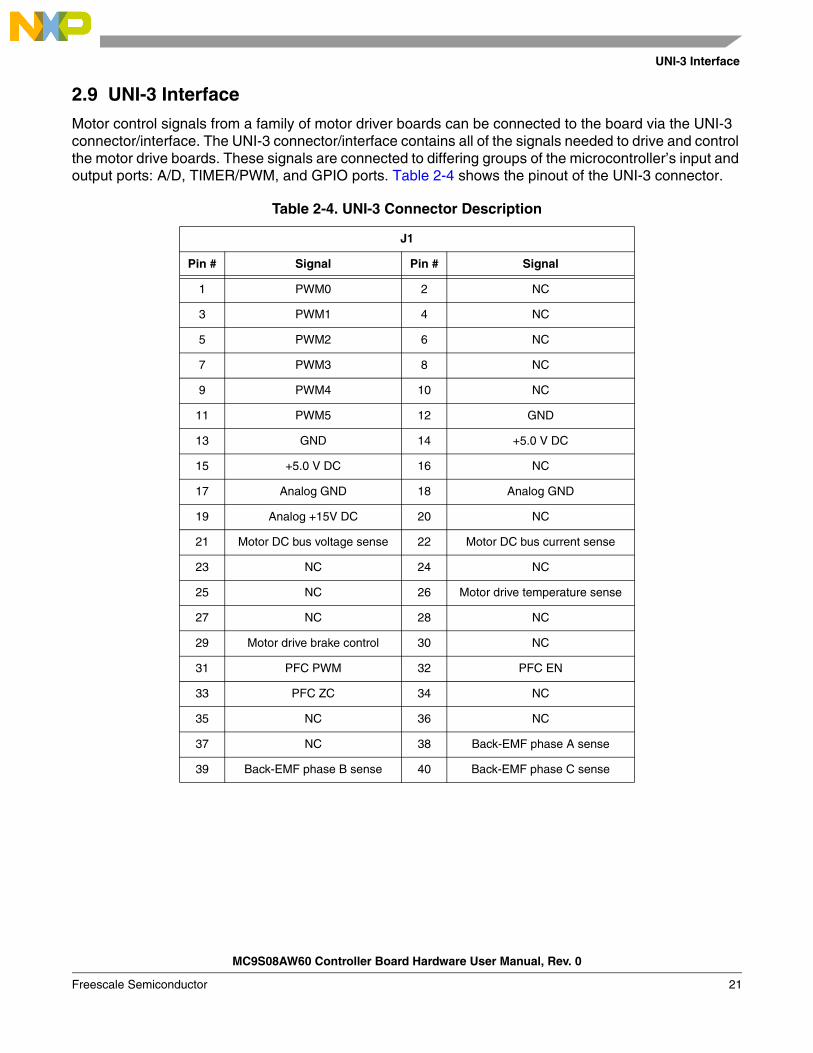
2.9 UNI-3 Interface
Motor control signals from a family of motor driver boards can be connected to the board via the UNI-3 connector/interface. The UNI-3 connector/interface contains all of the signals needed to drive and control the motor drive boards. These signals are connected to differing groups of the microcontroller’s input and output ports: A/D, TIMER/PWM, and GPIO ports. Table 2-4 shows the pinout of the UNI-3 connector.
Table 2-4. UNI-3 Connector Description
J1
Pin # Signal Pin # Signal
1 PWM0 2 NC
3 PWM1 4 NC
5 PWM2 6 NC
7 PWM3 8 NC
9 PWM4 10 NC
11 PWM5 12 GND
13 GND 14 +5.0 V DC
15 +5.0 V DC 16 NC
17 Analog GND 18 Analog GND
19 Analog +15V DC 20 NC
21 Motor DC bus voltage sense 22 Motor DC bus current sense
23 NC 24 NC
25 NC 26 Motor drive temperature sense
27 NC 28 NC
29 Motor drive brake control 30 NC
31 PFC PWM 32 PFC EN
33 PFC ZC 34 NC
35 NC 36 NC
37 NC 38 Back-EMF phase A sense
39 Back-EMF phase B sense 40 Back-EMF phase C sense
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
Freescale Semiconductor 21

Technical Summary
2.9.1 UNI-3 BRAKE and PFC Signals
Four control signals are connected to the UNI-3 interface: BRAKE, PFC PWM, PFC ENABLE outputs, and PFC zero-cross input. These signals are connected to the MC9S08AW60 controller pins GPIO PTD1, PTD2, PTD3, and PTD5 through the zero-ohm resistors (see Figure 2-6). MC9S08AW60 controller pins GPIO PTD are also connected to the port D header. MC9S08AW60 has no other timer module, therefore the PFCPWM and PFCZC signals are connected to the GPIO for general use.
Figure 2-6. Schematic Diagram of the UNI-3 BRAKE and PFC Signals Connection
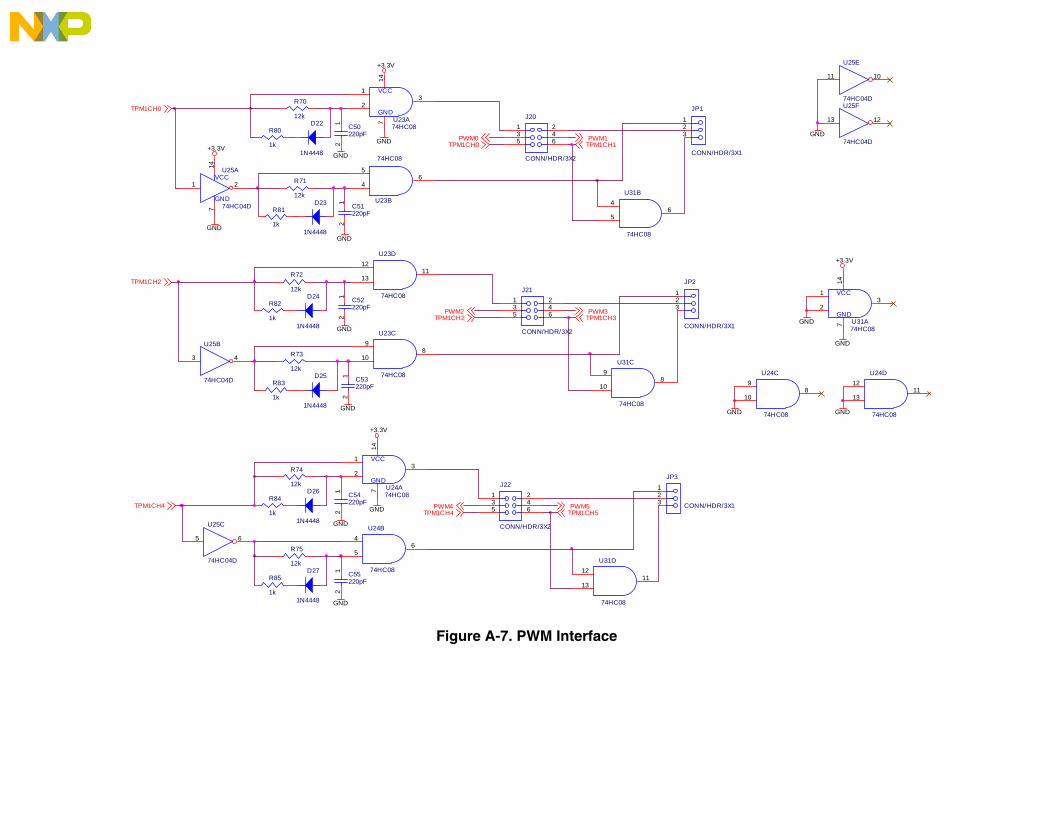
2.10 Motor Control PWM Signals and LEDs
The MC9S08AW60 controller has two dedicated TIMER/PWM units. The first unit contains six TIMER/PWM channels and the second unit contains two channels. On the MC9S08AW60 controller board, the first unit with the six TIMER/PWM channels is used as the PWM output generator. The PWM outputs can operate independently or in complementary pairs. Table 2-5 shows PWM jumper configuration. When the jumpers J20, J21, and J22 are in positions 1–3, 2–4, and the jumpers JP1, JP2, and JP3 are in position 1–2, the PWM outputs operate in complementary mode with hardware dead-time insertion (see Figure 2-7). All the PWM outputs are driven by the even TIMER/PWM channels TPM1CH0, TPM1CH2, and TPM1CH4 only. Odd PWM output channels complement their associated even channels. When jumpers J20, J21, and J22 are in positions 1–3, 2–4, and jumpers JP1, JP2, and JP3 are in position 2–3, the PWM outputs operate in complementary mode, but each PWM output is connected to its associated TPM1CHx channel (PWM0 is connected to TPM1CH0, PWM1 to TPM1CH1, etc.) with hardware dead-time insertion. The complementary PWM outputs are protected against even and odd active output TPM1CHx channels at the same time. When the even TPM1CHx channel is active, the odd PWM output is inactive, regardless of the state on the odd TPM1CHx channel. This PWM mode of operation can be useful while developing the software driver to control the PWM outputs in complementary mode without external hardware. When the jumpers J20, J21, and J22 are in positions 3–5 and 4–6, the PWM outputs operate independently without hardware dead-time insertion. PWM outputs are directly connected to their associated TPM1CHx channel outputs (PWM0 to TPM1CH0, PWM1 to TPM1CH1, etc.). Dead-time insertion can be done by the MC9S08AW60 software.
MC9S08AW60
PTD1
PTD2
PTD3
PTD5
UNI-3 BRAKER62 0R
UNI-3 PFCPWMR63 0R
UNI-3 PFCZCR68 0R
UNI-3 PFCENR69 0R
PORT DHEADER
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
22 Freescale Semiconductor

Motor Control PWM Signals and LEDs
Figure 2-7. PWM Interface
Dead time can be adjusted by changing the values of the associated R and C electronic components (see Table 2-6).
Table 2-5. PWM Configuration Jumper Table
J20, J21, J22 JP1, JP2, JP3 HW dead time PWM Operation Mode
1–32–4
1–2 YesComplementary mode: the odd PWM outputs
generated by PWM on-board circuitry
1–32–4
2–3 YesComplementary mode: each PWMx is generated by
associated TPM1CHx
3–54–6
— NoIndependent mode: PWMx outputs directly connected
to TPM1CHx
MC9S08AW60
TPM1CH0TPM1CH2TPM1CH4
1
32
Dead-timeinsertion
2
64
Dead-timeinsertion 1
53
J20 J21 J22
PWM0PWM2PWM4
PWM1PWM3PWM5
Even PWM channels
Odd PWM channels
J20 J21 J22
JP1 JP2 JP3
PWM HEADER, UNI-3
PWM HEADER, UNI-3
TPM1CH1TPM1CH3TPM1CH5
R
Rdis C
Dead time = 0.6 * R * C
IN OUT
Dead-time insertion circuit
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
Freescale Semiconductor 23

Technical Summary
For calculating the inserted dead time, the following formula should be used:
PWM output group lines are connected to the UNI-3 interface connector and to a set of six PWM LEDs via inverting buffers. These PWM LEDs indicate the status of the PWM group signals (see Figure 2-8).
Figure 2-8. PWM LEDs
2.11 Motor Protection Logic
The MC9S08AW60 controller board contains a UNI-3 connector that interfaces with various motor drive boards. The microcontroller can sense error conditions generated by the motor power stage boards via signals on the UNI-3 connector.
Table 2-6. PWM Channels and Associated R and C Components
R C Associated PWM channel
R70 C50 PWM0
R71 C51 PWM1
R72 C52 PWM2
R73 C53 PWM3
R74 C54 PWM4
R75 C55 PWM5
Dead time = 0.6 * R * C
BUFFER
UNI-3, PWM HEADER
PWM0PWM1PWM2PWM3PWM4PWM5
6x yellow LEDs
+3.3V
PWM0PWM1PWM2PWM3PWM4PWM5
PWM0D2
PWM1D4
PWM2D5
PWM3D6
PWM4D7
PWM5D9
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
24 Freescale Semiconductor

Motor Protection Logic
2.11.1 Over-Current and Over-Voltage Protection
The motor driver board’s DC bus voltage and DC bus current are sensed on the power stage board. The conditioned signals are transferred to the MC9S08AW60 controller board via the UNI-3 connector. DC bus voltage and DC bus current analog input signals are compared to a limit set by trimpots. If the input analog signals are greater than the limit set by the trimpot, a 0 V fault signal is generated. A fault LED monitors the fault states. The UNI-3 DC bus over-voltage and DC bus over-current fault signal is connected to the microcontroller’s IRQ input (see Figure 2-9).
Figure 2-9. FAULT Protection Circuit
The DC bus over-voltage and DC bus over-current threshold levels can be adjusted by the trim-pots R29 and R32.
2.11.2 Temperature Sensing
Analog feedback signal for temperature of power module is transferred to the MC9S08AW60 controller board via the UNI-3 connector. This signal is connected to the controller’s AD1P7 analog input.
DC over-voltage
+
–
+5.0V
LM393M
DC over-current
+3.3VA
+
–
+5.0V
LM393M
+3.3VA
UNI-3 DCBV
UNI-3 DCBI
RED LEDD1
+3.3 V
R29
R32MC9S08AW60
IRQ
TP3
TP5
TP2
TP4
FAULT
AD1P0 (PTB0)
ADCFILTER
ADC HEADER
AD1P1 (PTB1)
ADCFILTER
ADC HEADER
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
Freescale Semiconductor 25

Technical Summary
2.12 DC Bus Current Sensing
The UNI-3 DC bus current value can be directly sensed by the ADC input pin AD1P1. The MC9S08AW60 controller board contains the hardware for sensing the peak and average values of the DC bus current. Figure 2-10 shows the DCBI peak detector and DCBI average value sensing circuitry. DCBI peak current value can be sensed by the ADC input pin AD1P2, and DCBI average value can be sensed by AD1P3. These ADC input pins can also be used as universal analog input pins on the ADC header when the zero ohm resistors R43 and R46 are not present.
Figure 2-10. DCBI Peak Detector and Average Value Sensing
DCBI peak detector
+
–MC33502D
DCBI average value sensing
UNI-3 DCBIMC9S08AW60
+3.3VA
+
–MC33502D
+3.3VA TP22
TP21
R43 0R
R46 0RR40
10k C58100 nF
C57330nF
R37510k AD1P2 (PTB2)ADC
FILTER
UNI-3 DCBI
ADCFILTER AD1P3 (PTB3)
τ = 1 ms
τ = 150ms
TP4
TP4
ADCHEADER
ADCHEADER
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
26 Freescale Semiconductor

Back-EMF Current Sensing
2.13 Back-EMF Current Sensing
The UNI-3 connector supplies three back-EMF current signals. These back-EMF signals on the UNI-3 connector are derived from a resistor divider network contained in the motor drive unit. These resistors scale down the attached motor’s back-EMF voltages to a 0 to +3.3 V level. The back-EMF signals are connected to the controller’s AD1P4, AD1P5, and AD1P6 analog inputs (see Table 2-7).
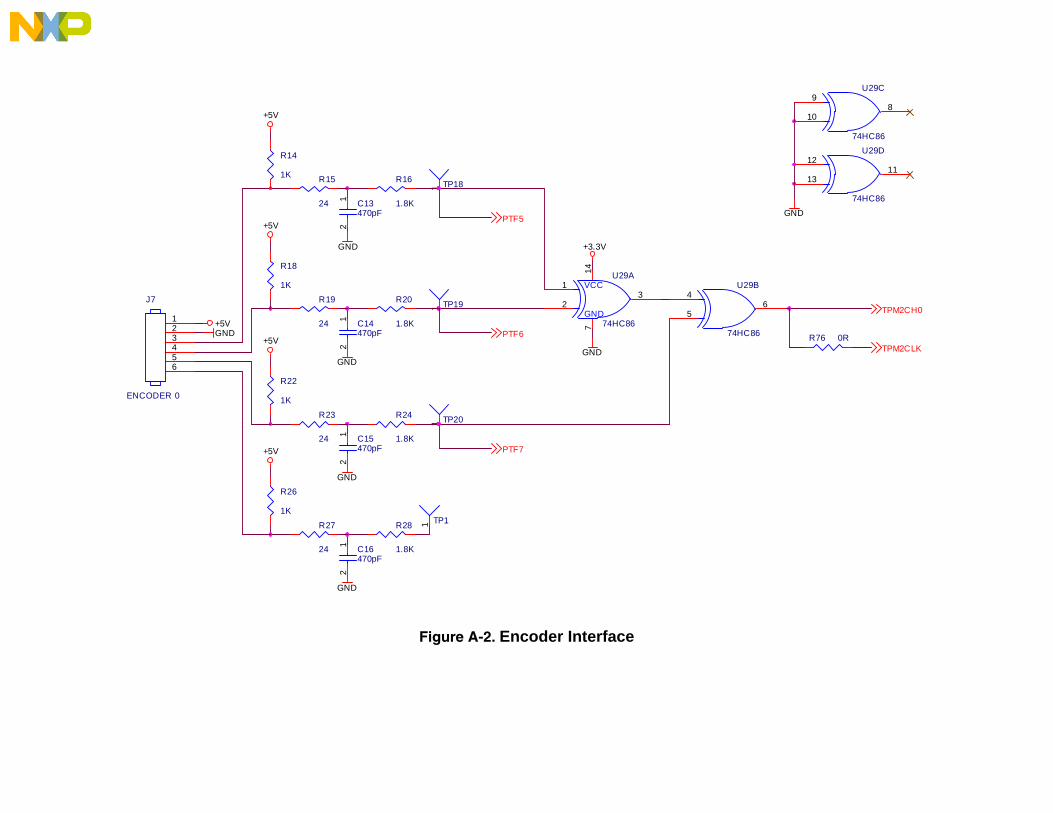
2.14 Quadrature Encoder/Hall-Effect Interface
The MC9S08AW60 controller board has a quadrature encoder/hall-effect interface connected to the microcontroller’s input pins PTF5, PTF6, and PTF7 for the position sensing. When any position changes occur, the TPM2CH0 (PTF4) output turns over its logical value and can generate the interrupt for new position sensing. This output can be optionally connected to the controller’s TPM2CLK (PTD4) input, when the zero-ohm resistor R76 is present. This TPM2CLK input can be used for the speed calculation (see Figure 2-11).
Figure 2-11. Encoder Interface
Table 2-7. Back-EMF Signals and Associated Analog Inputs
Back-EMF signal Associated Analog Input
BEMFA AD1P4
BEMFB AD1P5
BEMFC AD1P6
123456
+5.0V FILTER
PIN 1: +5.0 VPIN 2: GROUNDPIN 3: PHASE APIN 4: PHASE BPIN 5: INDEXPIN 6: HOME
MC9S08AW60
J7
TP1
TPM2CLK / PTD4
TPM2CH0 / PTF4
R76 0R
FILTER
FILTER
FILTER
Exclusive-ORgates
PORT DHEADER
PTF7
PTF6
PTF5
TP18
TP19
TP20
Encoder
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
Freescale Semiconductor 27
Technical Summary
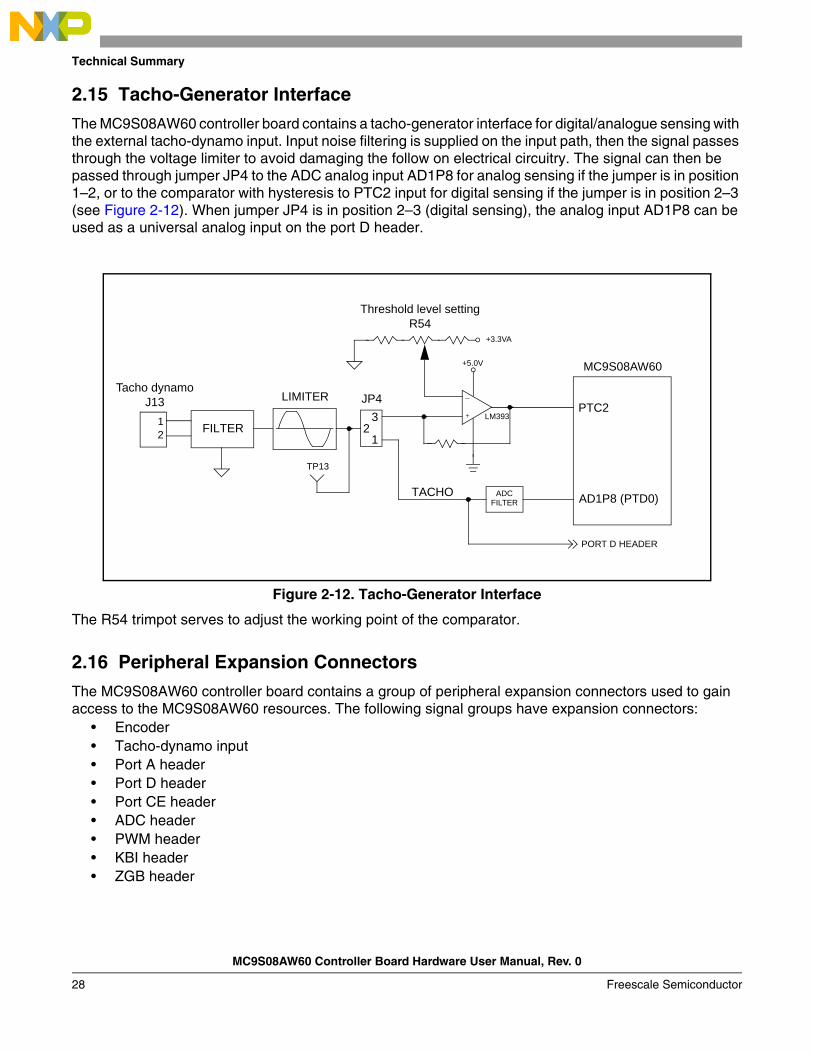
2.15 Tacho-Generator Interface
The MC9S08AW60 controller board contains a tacho-generator interface for digital/analogue sensing with the external tacho-dynamo input. Input noise filtering is supplied on the input path, then the signal passes through the voltage limiter to avoid damaging the follow on electrical circuitry. The signal can then be passed through jumper JP4 to the ADC analog input AD1P8 for analog sensing if the jumper is in position 1–2, or to the comparator with hysteresis to PTC2 input for digital sensing if the jumper is in position 2–3 (see Figure 2-12). When jumper JP4 is in position 2–3 (digital sensing), the analog input AD1P8 can be used as a universal analog input on the port D header.
Figure 2-12. Tacho-Generator Interface
The R54 trimpot serves to adjust the working point of the comparator.
2.16 Peripheral Expansion Connectors
The MC9S08AW60 controller board contains a group of peripheral expansion connectors used to gain access to the MC9S08AW60 resources. The following signal groups have expansion connectors:
• Encoder• Tacho-dynamo input• Port A header• Port D header• Port CE header• ADC header• PWM header• KBI header• ZGB header
3
12
–
+
+5.0V
LM393
+3.3VA
Threshold level settingR54
PTC2
AD1P8 (PTD0)
JP4
TACHO
LIMITER
FILTER12
Tacho dynamoJ13
ADCFILTER
PORT D HEADER
MC9S08AW60
TP13
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
28 Freescale Semiconductor
Peripheral Expansion Connectors
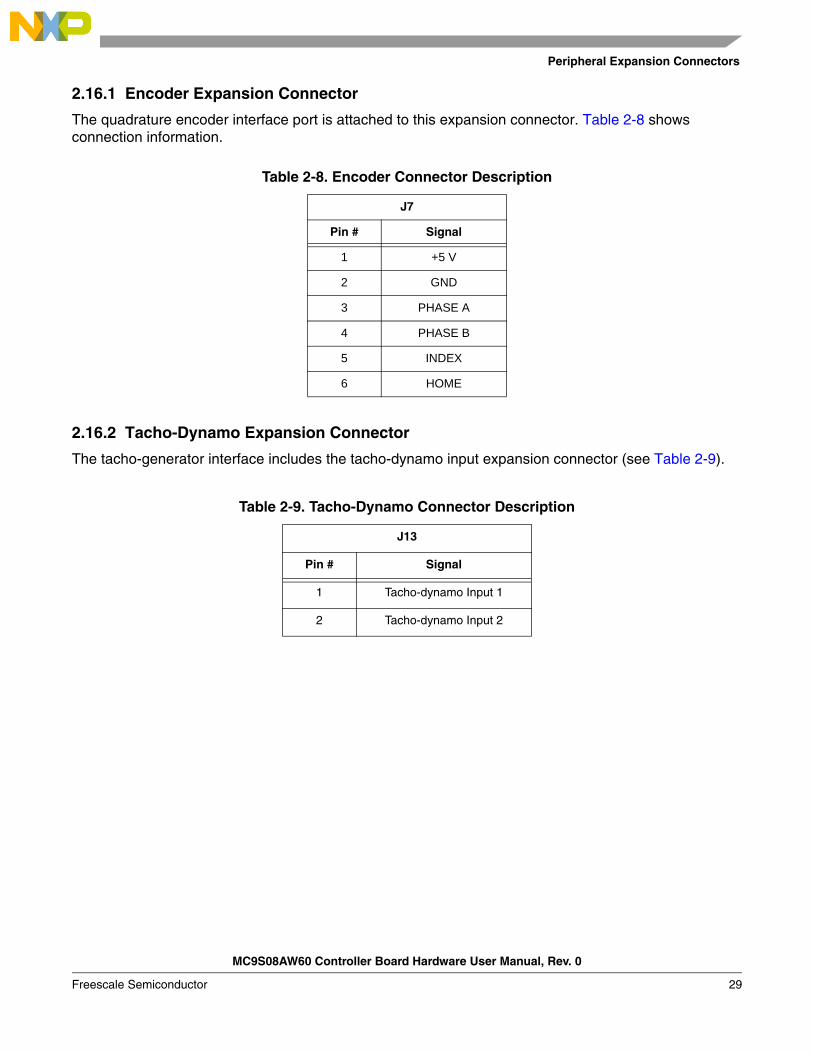
2.16.1 Encoder Expansion Connector
The quadrature encoder interface port is attached to this expansion connector. Table 2-8 shows connection information.
2.16.2 Tacho-Dynamo Expansion Connector
The tacho-generator interface includes the tacho-dynamo input expansion connector (see Table 2-9).
Table 2-8. Encoder Connector Description
J7
Pin # Signal
1 +5 V
2 GND
3 PHASE A
4 PHASE B
5 INDEX
6 HOME
Table 2-9. Tacho-Dynamo Connector Description
J13
Pin # Signal
1 Tacho-dynamo Input 1
2 Tacho-dynamo Input 2
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
Freescale Semiconductor 29

Technical Summary
2.16.3 Port A Header
The general-purpose input/output port A is attached to this header. Table 2-10 shows connection information
2.16.4 Port D Header
The general-purpose input/output port D is attached to this header. Eight pins are shared with ADC1, KBI1 modules, and TPM1 and TPM2 external clock inputs. Refer to Table 2-11 for connection information.
Table 2-10. Port A Header Description
J23
Pin # Signal Pin # Signal
1 PTA0 2 PTA1
3 PTA2 4 PTA3
5 PTA4 6 PTA5
7 PTA6 8 PTA7
9 GND 10 +3.3 V
Table 2-11. Port D Header Description
J27
Pin # Signal Pin # Signal
1 TACHO (PTD0 / AD1P8) 2 PTD1 / AD1P9
3 PTD2 / AD1P10 / KBI1P5 4 PTD3 / AD1P11 / KBI1P6
5 PTD4 / AD1P12 / TPM2CLK 6 PTD5 / AD1P13
7 PTD6 / AD1P14 / TPM1CLK 8 PTD7 / AD1P15 / KBI1P7
9 GND 10 +3.3 V
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
30 Freescale Semiconductor

Peripheral Expansion Connectors
2.16.5 PORT CE Header
Two general-purpose input/output port C pins and six port E pins are attached to this header. Two port C pins are shared with IIC1 module, and six port E pins are shared with SCI1 and SPI1 modules. Table 2-12 shows connection information.
2.16.6 ADC Header
The eight input channels of the analog-to-digital conversion port are attached to this connector. Refer to Table 2-13 for connection information. There is an RC network on each of the analog port input signals; reference Figure 2-13.
Figure 2-13. Typical Analog Input RC Filter
Table 2-12. Port CE Header Description
J28
Pin # Signal Pin # Signal
1 SCL1 / PTC0 2 SDA1 / PTC1
3 TxD1 / PTE0 4 RxD1 / PTE1
5 /SS1 / PTE4 6 MISO1 / PTE5
7 MOSI1 / PTE6 8 SPSCK1 / PTE7
9 GND 10 +3.3 V
Table 2-13. ADC Header Description
J24
Pin # Signal Pin # Signal
1 UNI-3 DCBV (AD1P0) 2 UNI-3 DCBI (AD1P1)
3 DCBI PEAK (AD1P2) 4 DCBI AVERAGE (AD1P3)
5 UNI-3 BEMFA (AD1P4) 6 UNI-3 BEMFB (AD1P5)
7 UNI-3 BEMFC (AD1P6) 8 UNI-3 TEMP (AD1P7)
9 GNDA 10 +3.3 V
To analog port (AD1Px)100 Ω
Analog input (UNI-3, ...)
2.2 nF * *Note: some analog inputs use the 33 pF capacitor value instead of 2.2 nF
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
Freescale Semiconductor 31

Technical Summary
2.16.7 PWM Header
The six PWM interface output signals and one fault (IRQ) input signal are attached to this header. Table 2-14 shows connection information.
2.16.8 KBI Header
Five general-purpose input/output port G pins are attached to this header. These pins are shared with KBI1 module. Table 2-15 shows connection information.
Table 2-14. PWM Header Description
J25
Pin # Signal Pin # Signal
1 PWM0 2 PWM1
3 PWM2 4 PWM3
5 PWM4 6 PWM5
7 NC 8 IRQ
9 GND 10 +3.3 V
Table 2-15. KBI Header Description
J26
Pin # Signal Pin # Signal
1 KBI1P0 / PTG0 2 KBI1P1 / PTG1
3 KBI1P2 / PTG2 4 KBI1P3 / PTG3
5 KBI1P4 / PTG4 6 NC
9 GND 10 +3.3 V
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
32 Freescale Semiconductor

Test Points
2.16.9 ZGB Header
This header serves to connect the ZigBee module or other external peripherals that use the serial communication protocol. Refer to Table 2-16 for connection information.
2.17 Test Points
The MC9S08AW60 controller board has 18 test pins. The four test pins are located near the corners of the board and provide a digital ground (GND) signal for easy oscilloscope attachment.
Table 2-16. ZGB Header Description
J30
Pin # Signal Pin # Signal
1 NC 2 GND
3 RxD2 4 NC
5 TxD2 6 +3.3V
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
Freescale Semiconductor 33

Technical Summary
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
34 Freescale Semiconductor

Appendix A. MC9S08AW60 Controller Board Schematics
MC9S08AW60 Controller Board Hardware User Manual, Rev.0
Freescale Semiconductor 35
/RESET
J30
ZGB
1 23 4
65
GND
+3.3V
125M X100
8MHz
L
L
J29
BACKGROUND
1 23 4
65
GND
+3.3V
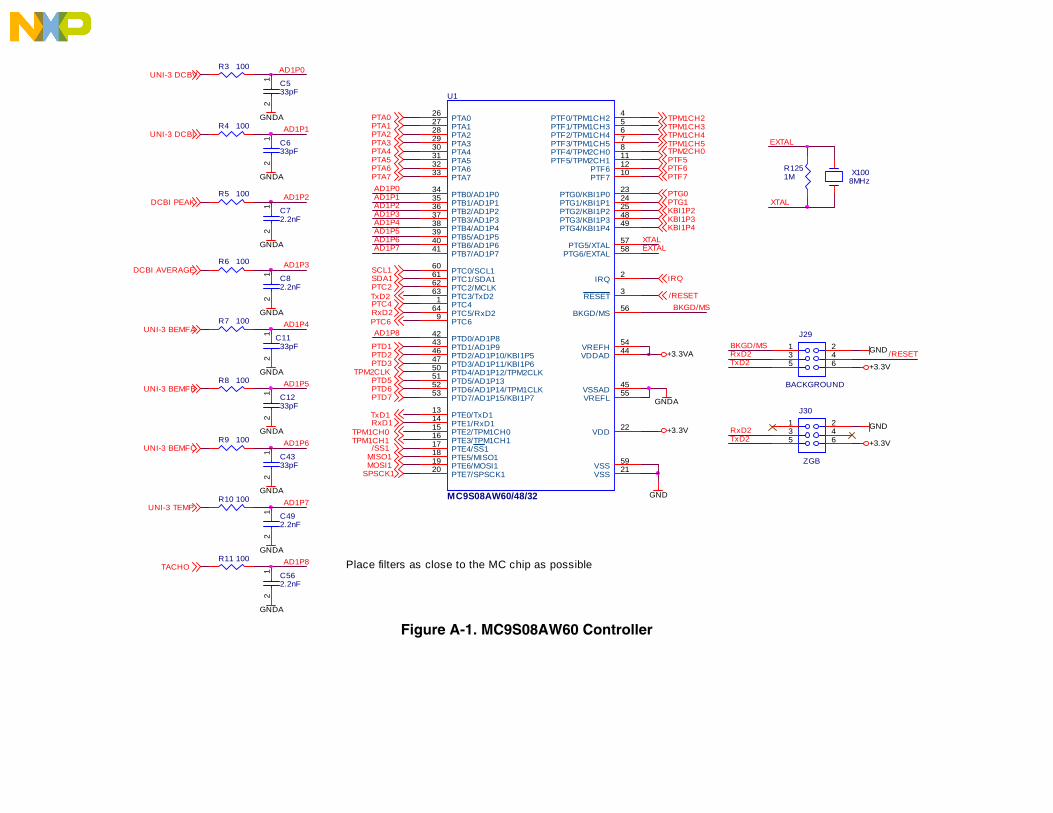
Figure A-1. MC9S08AW60 Controller
TPM1CH3
TxD2
AD1P8
PTD1PTD2PTD3
TPM1CH4
TPM2CLK
PTD6PTD5
PTD7
TPM1CH5
AD1P0
RxD1
AD1P8
C562.2nF
12
GNDA
R11 100TACHO
/SS1
MOSI1MISO1
SPSCK1
TxD2
C533pF
12
RxD2
C633pF
12
C82.2nF
12
C1133pF
12
C1233pF
12
GNDA
UNI-3 DCBV AD1P0
AD1P1
AD1P4
AD1P3
AD1P1
AD1P5
C72.2nF
12
AD1P2
GNDA
R5 100
R1
DCBI PEAK
GNDA
R3 100
UNI-3 DCBIR4 100
EXTA
R6 100
XTA
R7 100GNDA
DCBI AVERAGE
R8 100GNDA
GNDA
AD1P2
UNI-3 BEMFB
TxD2
AD1P3AD1P4AD1P5
AD1P7AD1P6
RxD2
PTF5TPM2CH0
Place filters as close to the MC chip as possible
PTF6PTF7
PTA0
PTG0
KBI1P2PTG1
KBI1P3KBI1P4
IRQ
/RESET
XTAL
PTA1PTA2PTA3PTA4PTA5
PTA7PTA6
TxD1
UNI-3 BEMFA
C4333pF
12
AD1P6R9 100
GNDA
UNI-3 BEMFC
GNDA
+3.3V
+3.3VA
TPM1CH1TPM1CH0
EXTAL
BKGD/MS
C492.2nF
12
AD1P7
GNDA
R10 100UNI-3 TEMP
PTC6
BKGD/MS
U1
MC9S08AW60/48/32
RESET3
VSS 59
IRQ 2
VSSAD45
VDD 22
VDDAD 44
PTA026
PTA127
PTA228
PTA329
PTA430
PTA531
PTA632
PTA733
PTB0/AD1P034
PTB1/AD1P135
PTB2/AD1P236
PTB3/AD1P337
PTB4/AD1P438
PTB5/AD1P539
PTB6/AD1P640
PTB7/AD1P741
PTC0/SCL160
PTC1/SDA161
PTC2/MCLK62
PTC3/TxD263
PTC41
PTC5/RxD264
PTC69
PTD0/AD1P842
PTD1/AD1P943
PTD2/AD1P10/KBI1P546
PTD3/AD1P11/KBI1P647
PTD4/AD1P12/TPM2CLK50
PTD5/AD1P1351
PTD6/AD1P14/TPM1CLK52
PTD7/AD1P15/KBI1P753
PTE0/TxD113
PTE1/RxD114
PTE2/TPM1CH015
PTE3/TPM1CH116
PTE4/SS117
PTE5/MISO118
PTE6/MOSI119
PTE7/SPSCK120
PTF0/TPM1CH24
PTF1/TPM1CH3 5
PTF2/TPM1CH4 6
PTF3/TPM1CH57
PTF4/TPM2CH0 8
PTF5/TPM2CH111
PTF6 12
PTF7 10
PTG0/KBI1P023
PTG1/KBI1P1 24
PTG2/KBI1P2 25
PTG3/KBI1P348
PTG4/KBI1P4 49
PTG5/XTAL 57
PTG6/EXTAL 58
BKGD/MS56
VSS21
VREFH54
VREFL55
SCL1
GND
SDA1PTC2
TPM1CH2
PTC4
RxD2
TPM2CH0
TPM2CLKR76 0R
9
108
U29C
74HC86
12
1311
U29D
74HC86
ND
Figure A-2. Encoder Interface
GND
+3.3V
1 TP1
R23
24
R19
24
R15
24
R27
24
12
C13470pF
12
C14470pF
1 TP19
12
C15470pF
1 TP20
12
C16470pF
1 TP18
PTF5
PTF6
PTF7
1
23
147
GND
VCCU29A
74HC86
4
56
U29B
74HC86
R28
1.8K
R24
1.8K
R20
1.8K
R16
1.8KG
123456
J7
ENCODER 0
GND+5V
+5V
+5V
+5V
GND
GND
+5V
GND
GND
R14
1K
R18
1K
R22
1K
R26
1K

R43
0R
R46
0R
0520LT1
DCBI AVERAGER40
10K
DCBI PEAK1
TP21
1
TP22
12
C58100nF
GNDA
Figure A-3. Fault and DCBI
Over Voltage
Over Current
12
C20360pF
FAULT
12
C18360pF
1TP2
1
TP3
1
TP4
1
TP5
D28
MBR31
2
84
-+ U4A
LM393M
R30
15K
57
6 -+ U4B
LM393M
3
21
84
-
+
U30AMC33502D
R34
15K
R37510K
+5V
R31
1M
R35
1M
5
67
84
-
+
U30BMC33502D
+3.3VA
GNDA
UNI-3 DCBI
UNI-3 DCBI
IRQ
+3.3V
D1RED
R33
270
12
C57330nF
GNDA
DCBI AVERAGE VALUE
+3.3VA
+3.3VA
GND
+3.3VA
UNI-3 DCBV
1 2
C19100nF
1 2
C17100nF DCBI PEAK DETECTOR
1 3
2
R2910K
UNI-3 DCBI
1 3
2
R3210K
GNDA
GNDA
GNDAGNDA
GNDA
R51
1K
GNDA
R77
1K

246810
PWM1PWM3PWM5IRQ
+3.3V
246810
T CE
SDA1RxD1MISO1SPSCK1
+3.3V
Figure A-4. Headers
13579
J25
PWM
PWM0PWM2PWM4
GND
13579
J28
POR
SCL1TxD1/SS1
MOSI1GND
1 23 4
657 8
J26
KBI
PTG0KBI1P2KBI1P4
GND +3.3V
1 23 4
657 89 10
J23
PORT A
KBI1P3PTG1
PTA1PTA0 1 23 4
657 89 10
J24
ADC
PTA2UNI-3 DCBIDCBI AVERAGEUNI-3 BEMFBUNI-3 TEMP
PTA4PTA6
UNI-3 DCBVDCBI PEAK
UNI-3 BEMFAUNI-3 BEMFC
PTA3
+3.3VAGNDA
PTA5PTA7
GND +3.3V
1 23 4
657 89 10
J27
PORT D
TACHO PTD1PTD2
TPM2CLKPTD6
PTD5PTD3
PTD7+3.3VGND
PWM0
PWM1
PWM2
PWM3
PWM4
PWM5
+3.3V
+3.3V
+3.3V
+3.3V
+3.3V
+3.3V
R36
270
R39
270
R42
270
R44
270
R47
270
R50
270
D2YELLOW
D4YELLOW
D5YELLOW
D6YELLOW
D7YELLOW
D9YELLOW
Figure A-5. LEDs and Buttons
/RESET
D8GREEN
PWM1RESET
PWM2
PWM3
PWM4
PWM5
PWM0
PTG0
+5V
GND
Power ON
PTC4 U25D
74HC04D
9 8
R38
330
PTC6
USER LED
VCC
GND
U5A
74HC04D
1 2
147
U5B
74HC04D
3 4
U5C
74HC04D
5 6
U5D
74HC04D
9 8
U5E
74HC04D
11 10
U5F
74HC04D
13 12
D3GREEN
R41
1k8
R45
1k8
R48
1k8
GND
PTG1
SW3
DOWN
1 32 4
SW2
UP
1 32 4
SW4
RUN/STOP
21
3
GND
GND
+3.3V
GND
R49270
+3.3V
SW11 32 4
GND

F
1 TP7 1 TP8
1 TP10 1 TP11
GND
GND
GND
GND
Figure A-6. Power Supply
12
+ C372.2uF50V
12
C39100nF1
2
C38100nF
+5V
12
+ C36330uF16V
D161N4448
GND
12
C40100nF
D171N4448
12
C41100nF
1 2L2INDUCTOR
Encoder
12
C42100nF
12
C61100n
GND
+3.3V
1 2L3INDUCTOR
12
C44100nF
12
C47100nF
+5V
GND
12
C63100nF
+3.3V
GND
12
C35100nF
12
C23100nF
12
C21100nF
1
23
J12
PWR_JACK
12
C25100nF
12
C62100nF
+3.3V
GND
12
C48100nF
GND
+3.3V 74HC08
12
C26100nF10V
12
C29100nF10V
12
C30100nF
12
C34100nF
+12V
12
C32100nF
12
+ C3347uF6.3V
+3.3VA
12
+ C2847uF6.3V
12
+ C2747uF6.3V
12
+ C2247uF6.3V
12
+ C3122uF16V
D151N4448
12
+ C24330uF16V
D141N4448
D131N4448
GROUND CONNECTION
D12FR1M
D101N4448
GND
GND
GND
+5V
GND
12
+ C910uF6.3V
GNDGND
D111N4448
UNI-3 +5V +5V
GND
LM393
GND
GNDAGND
GND
VIN3
VOUT2
GND1
U7
MC33269DT_3.3
1
2
3VIN VOUT
GND
U6TL78005CKTE
+3.3V
GND
MC9S08AW60/48/32
GNDA
+3.3VA
GNDA
GNDAGNDA
12
C59100nF
+3.3V
VIN3
VOUT2
GND1
U8
MC33269DT_3.3
GND
74HC86
GND GND
+3.3V
+3.3VA
GND
+3.3V 74HC04
GND
UNI-3 +15VA
GNDA
GNDA
1 TP12
GND
GNDA
12
C60100nF
MC33502D
1 TP9
1 TP6
GNDAGNDA
GND
1 2L1INDUCTOR
+3.3V
GND
GND
11 10
U25E
74HC04D
13 12
U25F
74HC04D
GND
812
1311
U24D
74HC08
GND
1
23
147
VCC
GNDU31A74HC08
Figure A-7. PWM Interface
1 23 4
65
J20
CONN/HDR/3X2
1 23 4
65
J21
CONN/HDR/3X2
1 23 4
65
J22
CONN/HDR/3X2
D26
1N4448
12
C54220pF
R74
12k
GND
R84
1k
5 6
U25C
74HC04DD27
1N4448
123
JP1
CONN/HDR/3X1
12
C55220pF
R75
12k
GND
R85
1k
TPM1CH4 PWM4TPM1CH4
PWM5TPM1CH5GND
+3.3V
1 2
147
VCC
GND
U25A
74HC04D
3 4
U25B
74HC04D
1
23
147
VCC
GNDU23A74HC08
4
56
U23B
74HC08
D22
1N4448
1
23
147
VCC
GNDU24A74HC08
4
56
U24B
74HC08
TPM1CH2
9
10
U24C
74HC08
12
C50220pF
GND
9
108
U23C
74HC08
12
1311
U23D
74HC08
TPM1CH0
TPM1CH2PWM2
123
JP2
CONN/HDR/3X1
GND
+3.3V
TPM1CH3PWM3
TPM1CH0
D23
1N4448
12
C51220pF
R71
12k
R81
1k
GND
PWM0
+3.3V
R70
12k
4
56
U31B
74HC08
9
108
U31C
74HC08
12
1311
U31D
74HC08
D24
1N4448
12
C52220pF
R80
1k
R72
12k
GND
R82
1k
GND
TPM1CH1
123
JP3
CONN/HDR/3X1
GND
PWM1
D25
1N4448
12
C53220pF
R73
12k
R83
1kGND

xD2
3V
xD2
Figure A-8. RS232 Interface
12 +
C1 2.2uF/35V
1 4
2 3
U21SFH6106
14
23
U22SFH6106
+3.3V
GND
T
+3.
R
1
TPGND1
1
TP+12V11
TPGND2
1TP+12V2
+12V
GND
R64
560
594837261
J6CON/CANNON9
R67
4.7k
R66
4.7k
R65
360
D21
1N4448
D191N4448
D201N4448
RS232
DTR
GND
RXD
Isolation Barrier
TXDRTS

R58
10k
+3.3V
M
M
PTC2
Figure A-9. Tacho-generator Interface
+3.3VA
TACHO
R57
2k2
R53
100k
12
J13Tacho Dy namo
GND
GND
13
2
R544k7
1
3
2D18HSMS-2802
GNDAGNDA GNDA+3.3VA
+5V
R55
82k
R59
82k
R60
560k
R56
1k
+3.3VA
31
2
84
-+ U9A
LM393
57
6 -+ U9B
LM393
R61
10k
R52
7k5
12
C460,022uF
12
C450,1uF
1 TP13
1 2 3
JP4CONN/HDR/3X1

UNI-3 PFCEN
UNI-3 DCBI
UNI-3 BEMFAUNI-3 BEMFC
UNI-3 TEMP
Figure A-10. UNI-3 Connector
UNI-3 DCBV
UNI-3 BEMFB
R62 0R
1 2
J16HDR 2X1
1 2
J18HDR 2X1
R63 0R
R68 0R
R69 0R
PWM1
GNDA
PWM0
PWM3PWM2
PWM4PWM5 GND
GND
246810121416182022242628303234363840
13579
111315171921232527293133353739
J1UNI-3
GNDA
UNI-3 +5V
UNI-3 +15VA
UNI-3 BRAKE
UNI-3 PFCZCUNI-3 PFCPWM
UNI-3 BRAKE
UNI-3 PFCPWM
UNI-3 PFCZC
UNI-3 PFCEN
PTD1
PTD2
PTD3
PTD5

MC9S08AW60 Controller Board Hardware User Manual, Rev.0
46 Freescale Semiconductor

Appendix B. MC9S08AW60 Controller Board PCB
Figure B-1. Top Copper Layer
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
Freescale Semiconductor 47

Figure B-2. Bottom Copper Layer (Bottom View)
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
48 Freescale Semiconductor

Figure B-3. Drill Copper Map
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
Freescale Semiconductor 49

Figure B-4. Top Silk Screen Layer
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
50 Freescale Semiconductor

Figure B-5. Top Board View
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
Freescale Semiconductor 51

Figure B-6. Bottom Board View
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
52 Freescale Semiconductor

Appendix C. MC9S08AW60 Controller Board Bill of Materials
Item Qty Description Reference Designators Part #/ Value
Capacitors
1 1 SMD, Polarized, Aluminum, size B C1 2.2 uF/35 V
2 5 SMD, Ceramic, size 0805 C5,C6,C11,C12,C43 33 pF
3 4 SMD, Ceramic, size 0805 C7,C8,C49,C56 2. 2nF
4 1 SMD, Polarized, Aluminium, size B C9 10 uF/6.3 V
5 4 SMD, Ceramic, size 0805 C13,C14,C15,C16 470 pF
6 25 SMD, Ceramic, size 0805
C17,C19,C21,C23,C25,C26,C29,C30,C32,C34,C35,C38,C39,C40,C41,C42,C44,C47,C48,C58,C59,C60,C61,C62,C63
100 nF
7 2 SMD, Ceramic, size 0805 C18,C20 360 pF
8 4 SMD, Polarized, Aluminium, size C C22,C27,C28,C33 47 uF/6.3 V
9 1 SMD, Polarized, Aluminium, size C C31 22 uF/16 V
10 2 SMD, Polarized, Aluminium, size G C24,C36 330 uF/16 V
11 1 SMD, Polarized, Aluminium, size B C37 2.2 uF/50 V
12 1 SMD, Ceramic, size 1812 C45 0,1 uF
13 1 SMD, Ceramic, size 1210 C46 0,022 uF
14 6 SMD, Ceramic, size 0805 C50,C51,C52,C53,C54,C55 220 pF
15 1 SMD, Ceramic, size 0805 C57 330 nF
Diodes / LEDs
16 1 SMD LED, size 0805 D1 RED
17 6 SMD LED, size 0805 D2,D4,D5,D6,D7,D9 YELLOW
18 2 SMD LED, size 0805 D3,D8 GREEN
19 16 SMD, minimelfD10,D11,D13,D14,D15,D16,D17,D19,D20,D21,D22,D23,
D24,D25,D26,D271N4448
20 1 DO-214AAD D12 FR1M
21 1 SMD, SOT-23 D18 HSMS-2802
22 1 SMD, SOD-123 D28 MBR0520LT1
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
Freescale Semiconductor 53

Connectors / Jumpers
23 4 Header 3X1, male, 2.54 mm JP1,JP2,JP3,JP4 CONN/HDR/3X1
24 1MLW40G, 20X2 connector, male, 2.54 mm
J1 UNI-3
25 1Cannon 9-pin DB9, 90° for PCB, female
J6 CON/CANNON9
26 1PSH02-06P, 6-pin connector with key and lock
J7 ENCODER 0
27 1Coax power connector, 2.1 mm, min. 8 A
J12 PWR_JACK
28 1 ARK500/2, 2-pin connector J13 Tach-dynamo
29 2 Header 2X1, male, 2.54 mm J16,J18 HDR 2X1
30 5 Header 3X2, male, 2.54 mm J20,J21,J22, J29, J30 CONN/HDR/3X2
31 5 Header 5X2, male, 2.54 mm J23, J24, J25, J27, J28 CONN/HDR/5X2
32 1 Header 4X2, male, 2.54 mm J26 CONN/HDR/4X2
33 18 Header 1X1, male
TP1,TP2,TP3,TP4,TP5,TP6,TP7,TP8,TP9,TP10,TP11,TP12,TP13,TP18,TP19,TP20,TP21,TP22,
TEST POINT
Inductors
34 3TH/2PIN_400X140 Ferrite core bead, d3.8x5.3
L1,L2,L3 INDUCTOR
Resistors
35 9 SMD, size 0805R3,R4,R5,R6,R7,R8,R9,R10,R11
100R
36 13 SMD, size 0805R14,R18,R22,R26,R51,R56,R77,R80,R81,R82,R83,R84,R85
1k
37 4 SMD, size 0805 R15,R19,R23,R27 24R
38 7 SMD, size 0805R16,R20,R24,R28,R41,R45,R48
1.8K
39 2 SMD, size 0805 R30,R34 15K
40 2 SMD, size 0805 R31,R35 1M
41 9 SMD, size 0805R33,R36,R39,R42,R44,R47,R49,R50
270R
42 1 SMD, size 0805 R38 330R
43 1 SMD, size 0805 R37 510K
Item Qty Description Reference Designators Part #/ Value
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
54 Freescale Semiconductor

44 3 SMD, size 0805 R40,R58,R61 10k
45 7 SMD, size 0805R43,R46,R62,R63,R68,R69,R76
0R
46 1 SMD, size 0805 R52 7k5
47 1 SMD, size 0805 R53 100k
48 2 SMD, size 1206 R55,R59 82k
49 1 SMD, size 0805 R57 2k2
50 1 SMD, size 0805 R60 560k
51 1 SMD, size 0805 R64 560
52 1 SMD, size 0805 R65 360
53 2 SMD, size 0805 R66,R67 4.7k
54 6 SMD, size 0805 R70,R71,R72,R73,R74,R75 12k
Trimmers
55 2 SMD trimmer R29,R32 10K
56 1 SMD trimmer R54 4k7
Switches / Push Buttons
57 1 SMD microswitch, push-button SW1 RESET
58 1 SMD microswitch, push-button SW2 UP
59 1 SMD microswitch, push-button SW3 DOWN
60 1 Lever switch, MS244LC, P-B070B SW4 RUN/STOP
Integrated Circuits
61 1 SMD, LQFP64 U1 MC9S08AW60/48/32
62 2 SMD, SOIC8 U4,U9 LM393M
63 2 SMD, SOIC14 U5,U25 74HC04D
64 1 SMD, D2PAK U6 TL78005CKTE
65 2 SMD, DPAK U7,U8 MC33269DT_3.3
66 2 SFH6106, Optocoupler, SMD U21,U22 SFH6106
67 3 SMD, SOIC14 U23,U24,U31 74HC08
68 1 SMD, SOIC14 U29 74HC86
69 1 SMD, SOIC8 U30 MC33502D
Item Qty Description Reference Designators Part #/ Value
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
Freescale Semiconductor 55

NOT POPULATED PARTS
70 4 Header 1X1, maleTPGND1,TPGND2,TP+12V1,TP+12V2
71 1 SMD, size 0805 R125 1M
72 1 8 MHz crystal, SD/HC49 X100 8 MHz
Item Qty Description Reference Designators Part #/ Value
MC9S08AW60 Controller Board Hardware User Manual, Rev. 0
56 Freescale Semiconductor


How to Reach Us:
Home Page:www.freescale.com
E-mail:[email protected]
USA/Europe or Locations Not Listed:Freescale SemiconductorTechnical Information Center, CH3701300 N. Alma School RoadChandler, Arizona 85224+1-800-521-6274 or [email protected]
Europe, Middle East, and Africa:Freescale Halbleiter Deutschland GmbHTechnical Information CenterSchatzbogen 781829 Muenchen, Germany+44 1296 380 456 (English)+46 8 52200080 (English)+49 89 92103 559 (German)+33 1 69 35 48 48 (French)[email protected]
Japan:Freescale Semiconductor Japan Ltd.HeadquartersARCO Tower 15F1-8-1, Shimo-Meguro, Meguro-ku,Tokyo 153-0064, Japan0120 191014 or +81 3 5437 [email protected]
Asia/Pacific:Freescale Semiconductor Hong Kong Ltd.Technical Information Center2 Dai King StreetTai Po Industrial EstateTai Po, N.T., Hong Kong+800 2666 [email protected]
For Literature Requests Only:Freescale Semiconductor Literature Distribution CenterP.O. Box 5405Denver, Colorado 802171-800-441-2447 or 303-675-2140Fax: [email protected]
Information in this document is provided solely to enable system and software implementers to use Freescale Semiconductor products. There are no express or implied copyright licenses granted hereunder to design or fabricate any integrated circuits or integrated circuits based on the information in this document.
Freescale Semiconductor reserves the right to make changes without further notice to any products herein. Freescale Semiconductor makes no warranty, representation or guarantee regarding the suitability of its products for any particular purpose, nor does Freescale Semiconductor assume any liability arising out of the application or use of any product or circuit, and specifically disclaims any and all liability, including without limitation consequential or incidental damages. “Typical” parameters that may be provided in Freescale Semiconductor data sheets and/or specifications can and do vary in different applications and actual performance may vary over time. All operating parameters, including “Typicals”, must be validated for each customer application by customer’s technical experts. Freescale Semiconductor does not convey any license under its patent rights nor the rights of others. Freescale Semiconductor products are not designed, intended, or authorized for use as components in systems intended for surgical implant into the body, or other applications intended to support or sustain life, or for any other application in which the failure of the Freescale Semiconductor product could create a situation where personal injury or death may occur. Should Buyer purchase or use Freescale Semiconductor products for any such unintended or unauthorized application, Buyer shall indemnify and hold Freescale Semiconductor and its officers, employees, subsidiaries, affiliates, and distributors harmless against all claims, costs, damages, and expenses, and reasonable attorney fees arising out of, directly or indirectly, any claim of personal injury or death associated with such unintended or unauthorized use, even if such claim alleges that Freescale Semiconductor was negligent regarding the design or manufacture of the part.
Freescale™ and the Freescale logo are trademarks of Freescale Semiconductor, Inc. All other product or service names are the propertyof their respective owners. The ARM POWERED logo is a registered trademark of ARM Limited. ARM7TDMI-S is a trademark of ARM Limited. Java and all other Java-based marks are trademarks or registered trademarks of Sun Microsystems, Inc. in the U.S. and other countries.The Bluetooth trademarks are owned by their proprietor and used by Freescale Semiconductor, Inc. under license.
© Freescale Semiconductor, Inc. 2004. All rights reserved.
DRM090Rev. 010/2007





























