Embed Size (px)
DESCRIPTION
MDOF SYSTEMS WITH DAMPING. General case Saeed Ziaei Rad. MDOF Systems with hysteretic damping- general case. Free vibration solution:. Assume a solution in the form of:. Here can be a complex number. The solution here is like the undamped case. However, both eigenvalues and - PowerPoint PPT Presentation
Citation preview

MDOF SYSTEMS WITH DAMPING
General case
Saeed Ziaei Rad

MDOF Systems with hysteretic damping- general case
}0{}]){[]([}]{[ xDiKxM Free vibration solution:
Assume a solution in the form of:tieXx }{}{
Here can be a complex number. The solution here is likethe undamped case. However, both eigenvalues and Eigenvector matrices are complex.The eigensolution has the orthogonal properties as:
][]][[]]; [[]][[][ rT
rT kiDKmM
The modal mass and stiffness parameters are complex.

MDOF Systems with hysteretic damping- general case
Again, the following relation is valid:
)1(22rr
r
rr i
m
k
A set of mass-normalized eigenvectors can be defined as:
rrr m }{)(}{ 2/1
What is the interpretation of complex mode shapes?The phase angle in undamped is either 0 or 180.Here the phase angle may take any value.

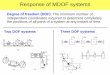
Numerical Example with structural damping
m1 m3m2
x1
x2
x3
k1 k3
k2k4 k5
k6
m1=0.5 Kgm2=1.0 Kgm3=1.5 Kgk1=k2=k3=k4=k5=k6=1000 N/m

Undamped
5.100
010
005.
][M
311
131
113
][K
Using command [V,D]=eig(k,M) in MATLAB
669800
033520
00950
][ 2r
142.493.635.
318.782.536.
318.1218.464.
][

Proportional Structural Damping
Assume proportional structural damping as:
6,,1, 05.0 jkd jj
)05.1(669800
0)05.1(33520
00)05.1(950
][ 2
i
i
i
r
)0(142.)0(493.)0(635.
)0(318.)180(782.)0(536.
)180(318.1)180(218.)0(464.
][

Non-Proportional Structural Damping
Assume non-proportional structural damping as:
6,,2, 0
3.0 11
jd
kd
j
)078.1(669000
0)042.1(33540
00)067.1(957
][ 2
i
i
i
r
)1.3(142.)3.1(492.)0(636.
)7.6(316.)181(784.)0(537.
)181(321.1)173(217.)5.5(463.
][

Non-Proportional Structural Damping
Each mode has a different damping factor.All eigenvectors arguments for undamped and proportional damp cases are either 0 or 180.All eigenvectors arguments for non-proportional case are within 10 degree of 0 or 180 (the modes are almost real).
Exercise: Repeat the problem withm1=1Kg, m2=0.95 Kg, m3=1.05 Kgk1=k2=k3=k4=k5=k6=1000 N/m

FRF Characteristics (Hysteretic Damping)
titi eFeXMDiK }{}]){[][]([ 2 Again, one can write:
The receptance matrix can be found as:T
rMDiKH ]][][[])[][]([)( 2212 FRF elements can be extracted:
N
r rrr
krjrjk i
H1
222)(
or
N
r rrr
jkrjk i
AH
1222
)(
Modal Constant

MDOF Systems with viscous damping- general case
The general equation of motion for this case can be written as:
}{}]{[}]{[}]{[ fxKxCxM Consider the zero excitation to determine the natural frequencies and mode shapes of the system:
steXx }{}{ This leads to:
}0{}]){[][]([ 2 XKsCsM
This is a complex eigenproblem. In this case, there are2N eigenvalues but they are in complex conjugate pairs.

MDOF Systems with viscous damping- general case
Nrss
rr
rr ,,1 }, {}{
, *
*
It is customary to express each eigenvalues as:
)1( 2rrrr is
Next, consider the following equation:
}0{}]){[][][( 2 rrr KCsMs Then, pre-multiply by : H
q}{
}0{}]){[][][(}{ 2 rrrHq KCsMs *

MDOF Systems with viscous damping- general case
}0{}]){[][][( 2 qqq KCsMs A similar expression can be written for : q}{
This can be transposed-conjugated and then multiply by r}{
}0{}]){[][][(}{ 2 rqqHq KCsMs **
Subtract equation * from **, to get:
}0{}]{[}){(}]{[}){( 22 rHqqrr
Hqqr CssMss
This leads to the first orthogonality equations:
}0{}]{[}{}]{[}){( rHqr
Hqqr CMss (1)

MDOF Systems with viscous damping- general case
Next, multiply equation (*) by and (**) by : qs rs
}0{}]{[}{}]{[}{ rHqr
Hqqr KMss (2)
Equations (1) and (2) are the orthogonality conditions:If we use the fact that the modes are pair, then
*
2
}{}{
)1(
rq
rrrq is

MDOF Systems with viscous damping- general case
Inserting these two into equations (1) and (2):
r
r
rHr
rHr
r
r
r
rHr
rHr
rr
m
k
M
K
m
c
M
C
}]{[}{
}]{[}{
}]{[}{
}]{[}{2
2
Where , , are modal mass, stiffness and damping. rm rk rc

FRF Characteristics (Viscous Damping)
The response solution is:
}{])[][]([}{ 12 FMCiKX We are seeking to a similar series expansion similar to theundamped case.To do this, we define a new vector {u}:
12
}{
N
x
xu
We write the equation of motion as:
1122 }0{}]{0:[}{]:[ NNNN uKuMC

FRF Characteristics (Viscous Damping)
This is N equations and 2N unknowns. We add an identityEquation as:
}0{}]{:0[}]{0:[ uMuM Now, we combine these two equations to get:
}0{}{0
0}{
0
u
M
Ku
M
MC
Which cab be simplified to:
}0{}]{[}]{[ uBuA 3

FRF Characteristics (Viscous Damping)
Equation (3) is in a standard eigenvalue form. Assuming a trial solution in the form of
NrBAs rr 2,,1} 0{}]){[][(
steUu }{}{
The orthogonality properties cab be stated as:
][]][[][
][]][[][
rT
rT
bB
aA
With the usual characteristics:
Nra
bs
r
rr 2,,1

FRF Characteristics (Viscous Damping)
Let’s express the forcing vector as:
0}{ 12
FP N
Now using the previous series expansion:
N
r rr
rTr
Nsia
P
Xi
X 2
112)(
}}{{}{
And because the eigenvalues and vectors occur in complex conjugate pair:
)(
}}{{}{
)(
}}{{}{**
*
112 rsia
P
sia
P
Xi
X
r
rHr
N
r rr
rTr
N

FRF Characteristics (Viscous Damping)
Now the receptance frequency response functionResulting from a single force and response parameter
jkH
kF jX
)1(()1(()(
2*
**
12
rrrr
N
r rrrrr
krjrjk
iaiaH
r
krjr
or
N
r rr
jkrrjkrjk i
SiRH
r122 2
))(/()(
Where:
rrkrkr
krkr
rkrkrrkr
aG
GS
GGR
}){/(}{
}Re{2}{
)1}Im{}Re{(2}{ 2


![kyxl.njfu.edu.cnkyxl.njfu.edu.cn/UpLoadFile/150802117248105.docx · Web viewIdentification of damping in MDOF systems using time-scale decomposition [J]. Journal of Sound and Vibration,](https://img.pdfslide.net/doc/110x75/5ea37872b5256567495f9852/kyxlnjfuedu-web-view-identification-of-damping-in-mdof-systems-using-time-scale.jpg)
![Global Collapse of Deteriorating Mdof Systems · 2004. 7. 13. · GLOBAL COLLAPSE OF DETERIORATING MDOF SYSTEMS Luis F. IBARRA1 and Helmut KRAWINKLER2 SUMMARY ... Lee [4] evaluated](https://img.pdfslide.net/doc/110x75/60d1531561b5121424749d5c/global-collapse-of-deteriorating-mdof-systems-2004-7-13-global-collapse-of.jpg)