Embed Size (px)
Citation preview

ME 343: Mechanical Design-3
Design of Shaft (continue)
Dr. Aly Mousaad AlyDepartment of Mechanical EngineeringDepartment of Mechanical Engineering
Faculty of Engineering, Alexandria University

ObjectivesObjectives
At the end of this lesson, we should be able to
• Understand design method for variable loadUnderstand design method for variable load
• Define equivalent stresses on shaft
• Design shaft based on stiffness and torsional rigidity g y
• Understand critical speed of shafts
Lecture 2: Design of Shaft 2

Shaft design based on fatigueShaft design based on fatigue
• Any rotating shaft loaded by stationary bending and torsional moments will be gstressed by completely reversed bending stress while the torsional stress will remain steadywhile the torsional stress will remain steady (i.e., Ma = M; Mm = 0; Ta = 0; Tm = T).
h f bl l (f )• A design method for variable load (fatigue), like Soderberg, Goodman or Gerber criteria can be followed.
Lecture 2: Design of Shaft 3

Shaft design based on fatigueShaft design based on fatigue
Design under variable normal load (fatigue)Lecture 2: Design of Shaft 4
Design under variable normal load (fatigue)

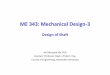
Shaft design based on fatigueShaft design based on fatigue
A is the design point for which the stress amplitude is σa and the mean stress is σm. In pthe Soderberg criterion the mean stress material property is the yield point Symaterial property is the yield point Sy, whereas in the the Goodman and Gerber criteria the material property is the ultimatecriteria the material property is the ultimate strength Sut. For the fatigue loading, material property is the endurance limit Se in reverse bending.
Lecture 2: Design of Shaft 5

Shaft design based on fatigueShaft design based on fatigue
S d b it i d G d it iSoderberg criterion mod-Goodman criterion
1a mFS FSS S
σ σ+ = 1a mFS FSS S
σ σ+ =
Gerber criterion
e yS S e utS S
2⎛ ⎞
2
1a m
e ut
FS FSS S
σ σ⎛ ⎞+ =⎜ ⎟⎝ ⎠
whereσa = stress amplitude (alternating stress); Se = endurance limit (fatigue limit for completely reversedendurance limit (fatigue limit for completely reversed loading); σm = mean stress; Sy = yield strength; σut = ultimate tensile strength and FS= factor of safety. g y
Lecture 2: Design of Shaft 6

Shaft design based on fatigueShaft design based on fatigue
Design under variable shear load (fatigue)Lecture 2: Design of Shaft 7
Design under variable shear load (fatigue)

Shaft design based on fatigueShaft design based on fatigue
• It is most common to use the Soderbergcriterion.
1f a m
e y
FS K FSS S
σ σ+ = Kf = fatigue stress e y
y f a ym
S K SS FS
σσ+ =
concentration factor
eS FS
y f aS K σσ σ+ = ys fs aS K τ
τ τ+ =m eqeS
σ σ+ = m eqesS
τ τ+ =
Normal Stress Equation Shear Stress Equation
Lecture 2: Design of Shaft 8
Normal Stress Equation Shear Stress Equation

Shaft design based on fatigueShaft design based on fatigue
S KS K ys fs am eq
es
S KS
ττ τ+ =y f a
m eqe
S KS
σσ σ+ =
• σeq and τeq are equivalent to allowable stresses (S /FS) d (S /FS) i l(Sy/FS) and (Sys/FS), respectively.
• Effect of variable stress has been effectively ydefined as an equivalent static stress.
C ti l f il th i b d t• Conventional failure theories can be used to complete the design.
Lecture 2: Design of Shaft 9

Shaft design based on fatigueShaft design based on fatigue
• Max. shear stress theory + Soderberg line (Westinghouse Code Formula) ( g )
22
max 2eq
allowable eq
στ τ τ⎛ ⎞
= = +⎜ ⎟⎝ ⎠2⎝ ⎠
2 2y y f a y fs aS S K S Kσ τ⎛ ⎞ ⎛ ⎞
2y y f a y fs a
m me eFS S S
σσ τ
⎛ ⎞ ⎛ ⎞= + + +⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠2 2
3 32 f a fs am mK M K TM TFSdS S S Sπ
⎛ ⎞ ⎛ ⎞= + + +⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠Lecture 2: Design of Shaft 10
e y e yS S S Sπ ⎝ ⎠ ⎝ ⎠

Shaft design based on rigidityShaft design based on rigidity
• Deflection is often the more demanding constraint. Many shafts are well within yspecification for stress but would exhibit too much deflection to be appropriatemuch deflection to be appropriate.
• Deflection analysis at even a single point of linterest requires complete geometry
information for the entire shaft.
Lecture 2: Design of Shaft 11

Shaft design based on rigidityShaft design based on rigidity
• It is desirable to design the dimensions at critical locations to handle the stresses, and fill in reasonable estimates for all other dimensions before performing a deflectiondimensions, before performing a deflection analysis.
fl f h h f b h l• Deflection of the shaft, both linear and angular, should be checked at gears and bearings.
Lecture 2: Design of Shaft 12

Shaft design based on rigidityShaft design based on rigidity
Sl l t l d fl ti f th h ft d/ l f t i t• Slopes, lateral deflection of the shaft, and/or angle of twist of the shaft should be within some prescribed limits.
CrownedCrowned tooth
Lecture 2: Design of Shaft 13
Diametral pitch, P = number of teeth/pitch diameter. 1 in = 25.4 mm.

Shaft design based on rigidityShaft design based on rigidity
f l b i h f d fl i• In case of sleeve bearings, shaft deflection across the bearing length should be less than the oil-film thi kthickness.
( ) ( ) ( ).T N mm L mmdθTwist angle: ( ) ( ) ( )
( ) ( )2 4/rad
G N mm J mmθ =
G: shear modulus; J: polar moment of inertia
• The limiting value of θ varies from 0 3 deg/m to 3• The limiting value of θ varies from 0.3 deg/m to 3 deg/m for machine tool shaft to line shaft respectivelyrespectively.
Lecture 2: Design of Shaft 14

Shaft design based on rigidityShaft design based on rigidity
L t l d fl tiLateral deflection:
• Double integration • Moment-area• Energy (Castigliano Theorem)δ= f (applied load, material property, moment of
inertia and given dimension of the beam). From the expression of moment of inertia, and k d l d δ h fknown design parameters, including δ, shaft dimension may be obtained.
Lecture 2: Design of Shaft 15

Double Integration MethodDouble Integration Method
( )2
2
d y Mdx EI
=( )( )( )
M xdyx dxdx EI x
θ = = ∫dx EI ( )dx EI x
( )( ) 2( )( )
M xy x dx
E I x= ∫∫
Use boundary conditions to obtain integration
( )EI x
Use boundary conditions to obtain integration constants
Lecture 2: Design of Shaft 16

Conjugate beam methodConjugate beam method
• Was developed by Otto Mohr in 1860
• Slope (real beam) = Shear (conj. beam)Slope (real beam) Shear (conj. beam)
• Deflection (real beam) = Moment (conj. beam)
• Length of conj. beam = Length of real beam
• The load on the conjugate beam is the M/EIThe load on the conjugate beam is the M/EI diagram of the loads on the actual beam
Lecture 2: Design of Shaft 17

Conjugate beam methodConjugate beam method
R l bReal beam
Conjugate beam
Real beam
Conjugate beam
Lecture 2: Design of Shaft 18

Example 1Example 1
Determine the slope and deflection at the tip of a cantilever using the conj beamthe conj. beam method.
lSol: 2
2BPLEI
θ =
32EIPLy =
Lecture 2: Design of Shaft 19
3By EI

Example 2Example 2
h i d fl i d hCompute the maximum deflection and the slopes at the bearings. EI is constant.
(a) (b)
Lecture 2: Design of Shaft 20

Critical speed of rotating shaftCritical speed of rotating shaft
• Critical speed of a rotating shaft is the speed where it becomes dynamically unstable. y y
• The frequency of free vibration of a non-rotating shaft is same as its critical speedrotating shaft is same as its critical speed.
( ) ( )( )
1 1 2 22 2 2
....602
n ncritical
w w wN RPM g
δ δ δπ δ δ δ
+ + +=
+ + +( )1 1 2 22 .... n nw w wπ δ δ δ+ + +
Lecture 2: Design of Shaft 21

Critical speed of rotating shaftCritical speed of rotating shaft
• W1, W2…. : weights of the rotating bodies (N)
• δ1, δ2 …. : deflections of the respective bodiesδ1, δ2 …. : deflections of the respective bodies (m)
F i l d h f h lf f i i h• For a simply supported shaft, half of its weight may be lumped at the center for better accuracy.
• For a cantilever shaft quarter of its weight• For a cantilever shaft, quarter of its weight may be lumped at the free end.
Lecture 2: Design of Shaft 22

Shaft design: general considerationsShaft design: general considerations
i l h l d h ld b k d• Axial thrust loads should be taken to ground through a single thrust bearing per load direction.
• Do not split axial loads between thrust pbearings as thermal expansion of the shaft can overload the bearings.g
• Shaft length should be kept as short as possible to minimize both deflections andpossible, to minimize both deflections and stresses.
Lecture 2: Design of Shaft 23

Shaft design: general considerationsShaft design: general considerations
• A cantilever beam will have a larger deflection than a simply supported (straddle mounted) p y pp ( )one for the same length, load, and cross sectionsection.
• Hollow shafts have better stiffness/mass ratio h h l f h land higher natural frequencies than solid
shafts, but will be more expensive and larger in diameter.
Lecture 2: Design of Shaft 24

Shaft design: general considerationsShaft design: general considerations
• Slopes, lateral deflection of the shaft, and/or angle of twist of the shaft should be within gsome prescribed limits.
• First natural frequency of the shaft should be• First natural frequency of the shaft should be at least three times the highest forcing f ( f ffrequency. (A factor of ten times or more is preferred, but this is often difficult to achieve).
Lecture 2: Design of Shaft 25

Example 3Example 3
Determine the diameter of a shaft of length L =1m, carrying a load of 5 kN at the center if the y gmaximum allowable shaft deflection is 1mm. What is the value of the slope at the bearingsWhat is the value of the slope at the bearings. Calculate the critical speed of this shaft if a disc weighting 45 kg is placed at the center E 209weighting 45 kg is placed at the center. E=209 GPa. ρst = 8740 kg/m^3.
Lecture 2: Design of Shaft 26

Example 3: solutionExample 3: solution
Maximum deflection:3PL
( )3
48PLyEI
=
( )( )
3
3 4
5000 10001
48 209 10 dπ×
=× × ×( )48 209 10
6456.45
d
d mm
× × ×
∴ =From a standard shaft size, d = 58 mm
Lecture 2: Design of Shaft 27

Example 3: solutionExample 3: solution
Slope at bearings:
( )22 5000 1000PL × ( )( ) ( )
1 243
5000 100016 16 209 10 58
64
PLEI
θ θ π×
= = =× × × ×( ) ( )
640.0027 rad=
which is much for tapered and cylindrical roller bearings. However, this value may be acceptable for deep-groove ball bearing.
Lecture 2: Design of Shaft 28

Example 3: solutionExample 3: solution
C iti l dCritical speed:Shaft weight = rho x A x L = 7840 x A x 1 = 20.7 kg
( ) ( )33 0.5 20.7 45 9.807 10000.097
48PL mmEI
δ× + × ×
= = =( ) ( )4348 48 209 10 58
64EI π× × × ×
3
60 9.807 30302 0.097 10criticalN RPMπ −= =
×
The operating speed of the shaft should be well below this value (say less than 1000 rpm).( y p )
Lecture 2: Design of Shaft 29

Example 4Example 4
F th bl l d i th i lFor the same problem solved in the previous lesson, determine the following:1 Lateral deflection at D (using Conj Beam method)1. Lateral deflection at D (using Conj. Beam method)2. Slope at bearings A and B (using Conj. Beam method)3. Critical speed3. Critical speed
A BC D
.
Lecture 2: Design of Shaft 30
mmm 66shd mm=

Shaft design: summaryShaft design: summary
• Shaft design means material selection, geometric layout, stress and strength (static g y g (and fatigue), deflection and slope at bearings.
• Conjugate beam method for slope and• Conjugate beam method for slope and deflection calculations.
• Some design considerations: (axial load, shaft length, support layout, hollow shafts, slopeslength, support layout, hollow shafts, slopes and deflection, operating speed)
Lecture 2: Design of Shaft 31

ReportReport
W it h t t t i l l ti fWrite a short report on material selection for shaft manufacturing. Talk briefly about heat treatment processes that may be consideredtreatment processes that may be considered.Deadline: Thursday, April 7, 2011How to submit:How to submit:
• Send attachment to [email protected] i titl t th il t d tPlease give a title to the email as your student number followed by your name, e.g. 999 Name Surname999 Name Surname
• Print out: not recommended
Lecture 2: Design of Shaft 32

Slides and sheetsSlides and sheets
Available for download at:
http://www engr uconn edu/~aly/Courses/ME343/http://www.engr.uconn.edu/ aly/Courses/ME343/
Lecture 2: Design of Shaft 33